Optimal Scheduling and Real-Time Control Schemes of Battery Energy Storage System for Microgrids Considering Contract Demand and Forecast Uncertainty




Abstract
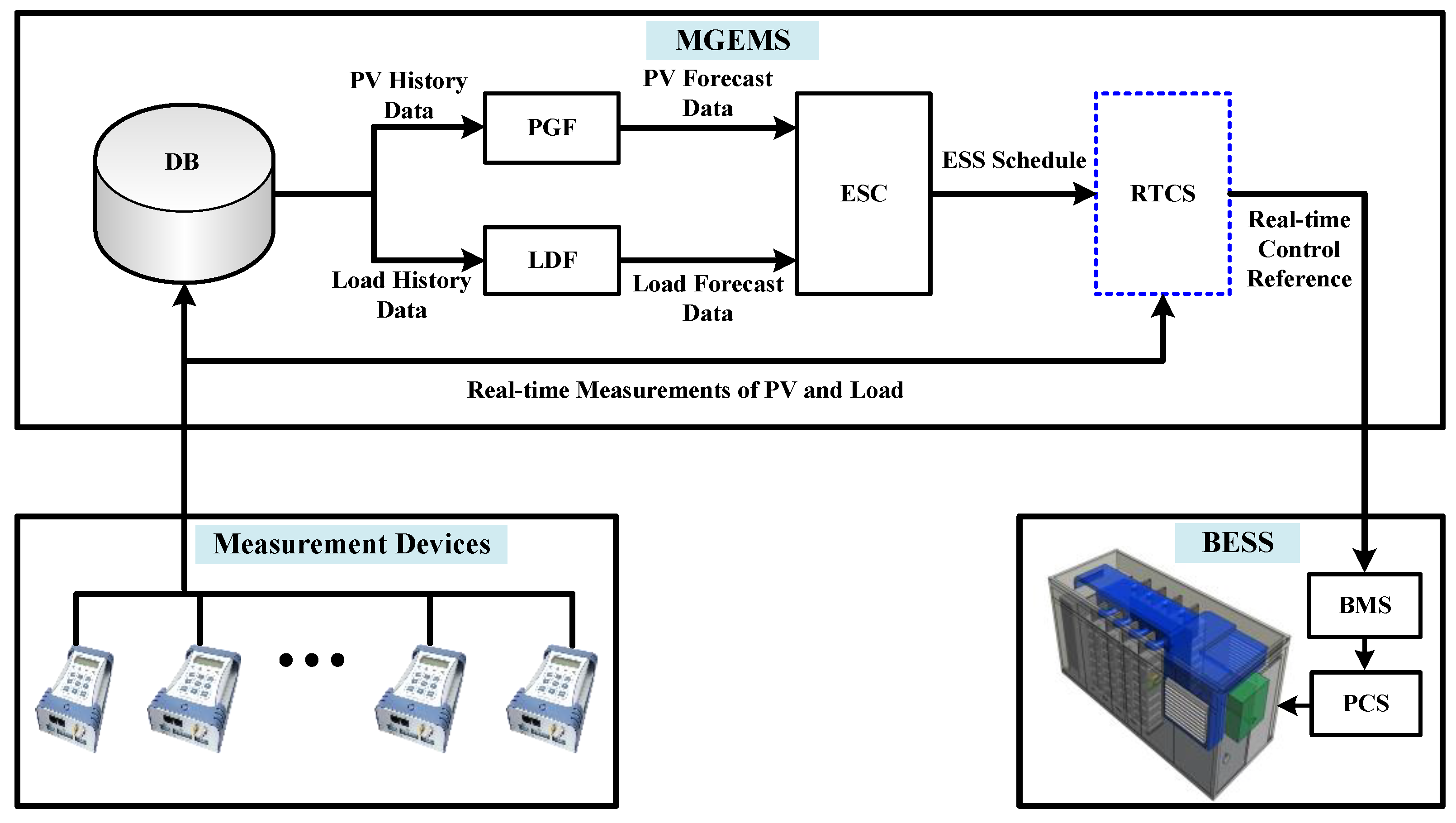
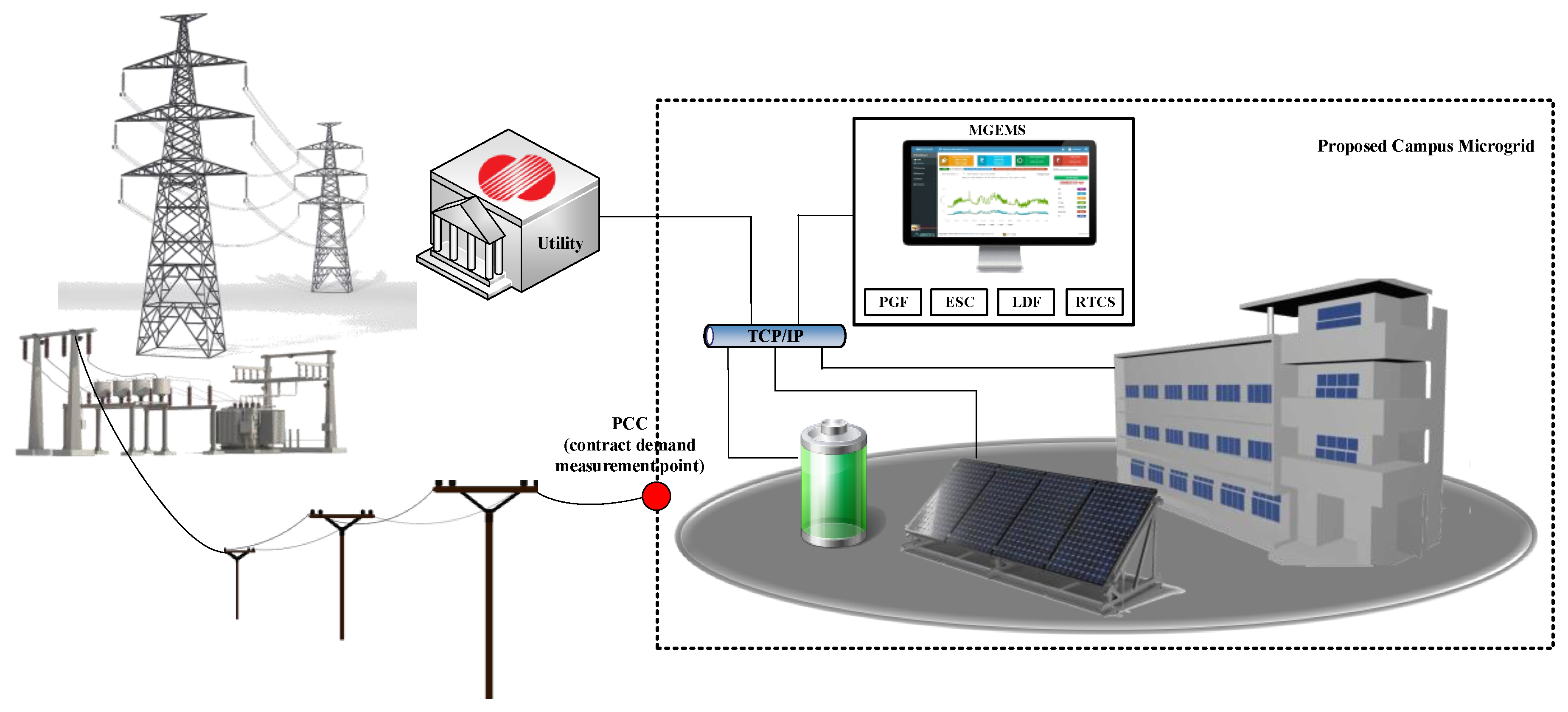
:1. Introduction
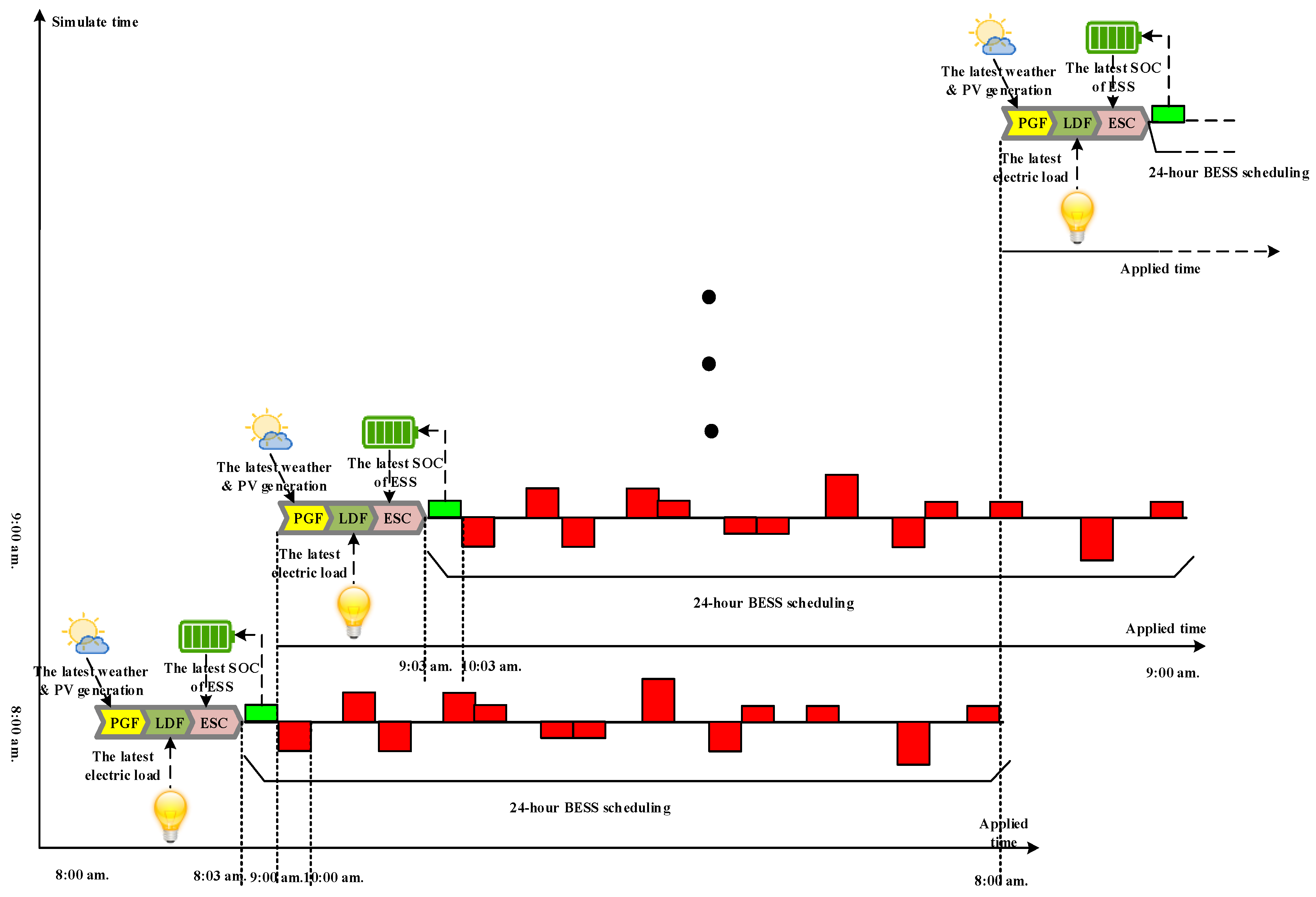
2. Rolling-Horizon-Based Optimal BESS Scheduling
2.1. Mixed Integer Linear Programming Based Formulation
- Introduce binary variables , where = 1 if is the maximum value, otherwise it is 0.
- Obtain the upper and lower bounds of the net flow at time and reformulate MILP:where is the maximum value of the net flow upper limits during the time horizon T.
2.2. Target SOC Value Assignment Method
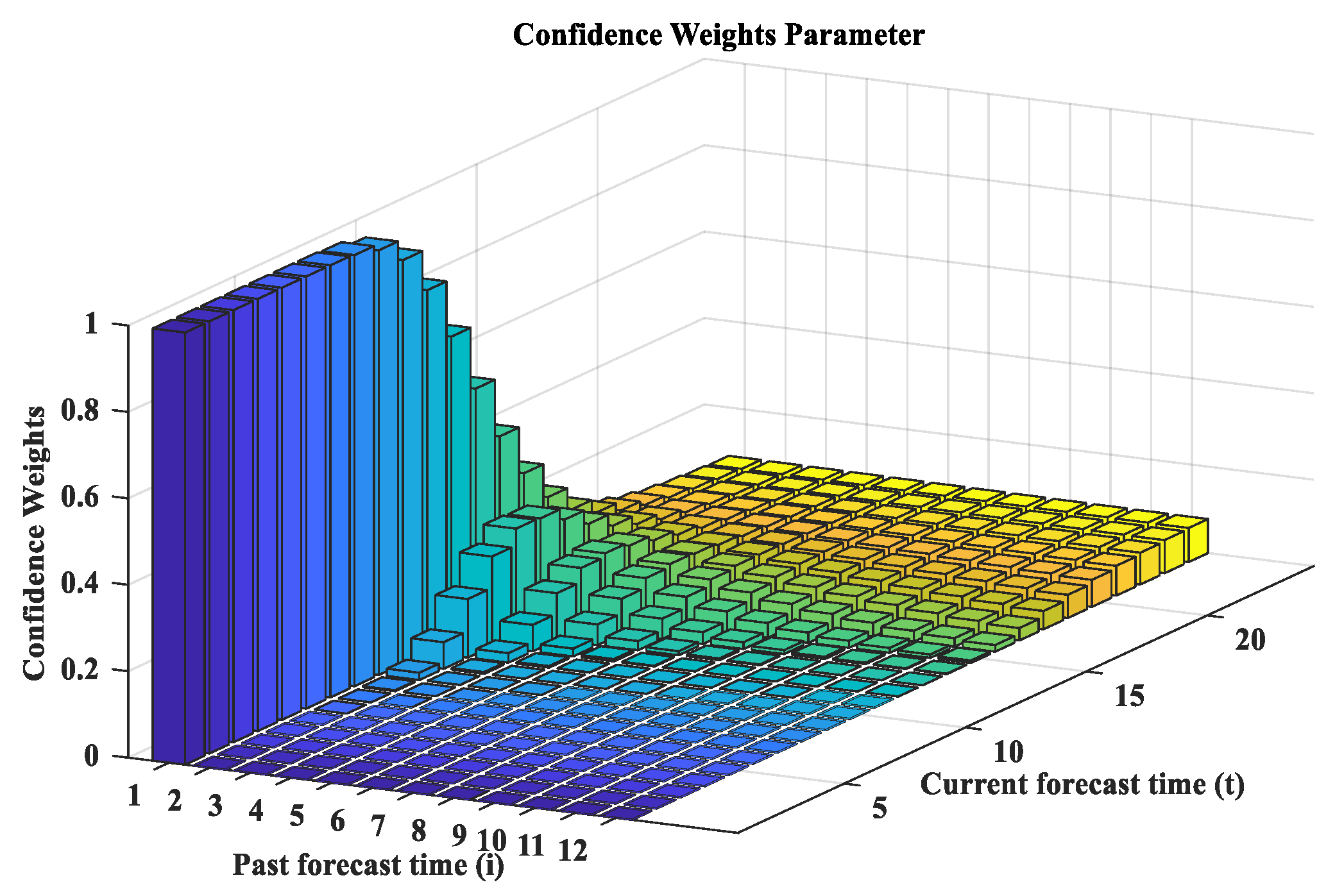
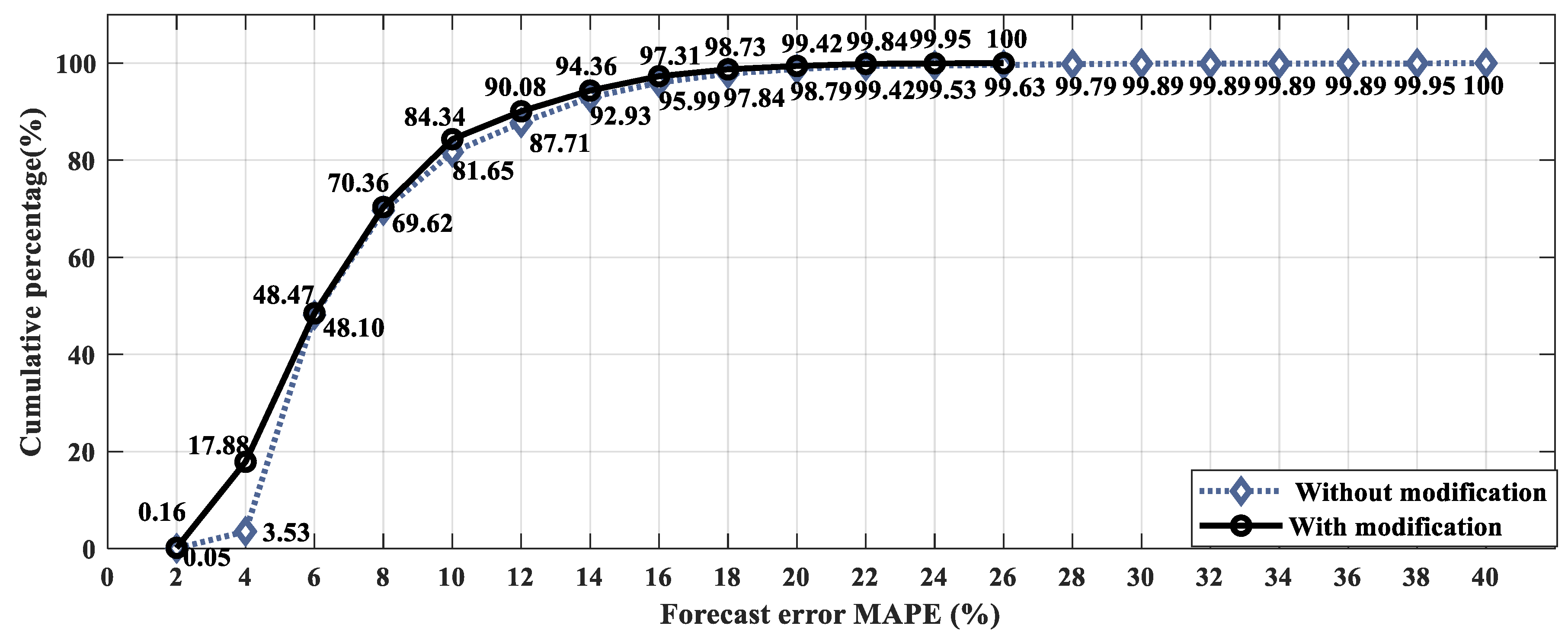
2.3. Confidence-Weight Method for Modifying Forecasted Load
3. Real Time Control Scheme for Handling Forecast Uncertainty
3.1. RTCS1: Control to Maintain the PCC Net Flow as Scheduled
3.2. RTCS2: Intelligent Scheduling Decision Against Actual Situation
- When the actual net load is larger than the forecasted net load,
- (a)
- If the actual net load does not exceed the contract demand, BESS will be controlled as scheduled, unless the scheduled charging leads to a contract demand violation. If the scheduled charging is too large, it will be adjusted until the actual net flow is the same as the contract demand.
- (b)
- If the actual net load exceeds the contract demand, but the forecasted net load does not, BESS will be controlled to reduce the actual net flow to the contract demand. In other words, BESS will increase the discharge or decrease the charge compared to the schedule.
- (c)
- If both the actual and forecasted net load exceed the contract demand, the demand charge is unavoidable. In this case, in order not to raise the demand charge as well as to maintain the SOC within appropriate level, BESS will be controlled to keep the PCC net flow as scheduled.
- When the actual net load is less than the forecasted net load,
- (a)
- If BESS was scheduled to charge, the real-time command will be set the same as the scheduled reference. This control will not increase the net flow at PCC, as well as enough energy can be charged as scheduled for future operation.
- (b)
- If BESS was scheduled to discharge and no demand charge was expected, the real-time command can be calculated such that the PCC net flow is maintained as scheduled. However, if the calculated value is negative, the real-time command will be set to zero to operate BESS in stand-by instead of charging mode. In this condition, by reducing the discharge, the saved energy can be used for future operation.
- (c)
- If the demand charge was expected despite the scheduled discharge, BESS will be controlled to reduce the demand charge. However, in this situation, over-discharge exceeding the scheduled value is not allowed because it will lead to an excessive reduction of SOC.
4. Simulation Results and Analysis
4.1. Improvement of LDF Performance by the Proposed Confidence Weight Parameter Method
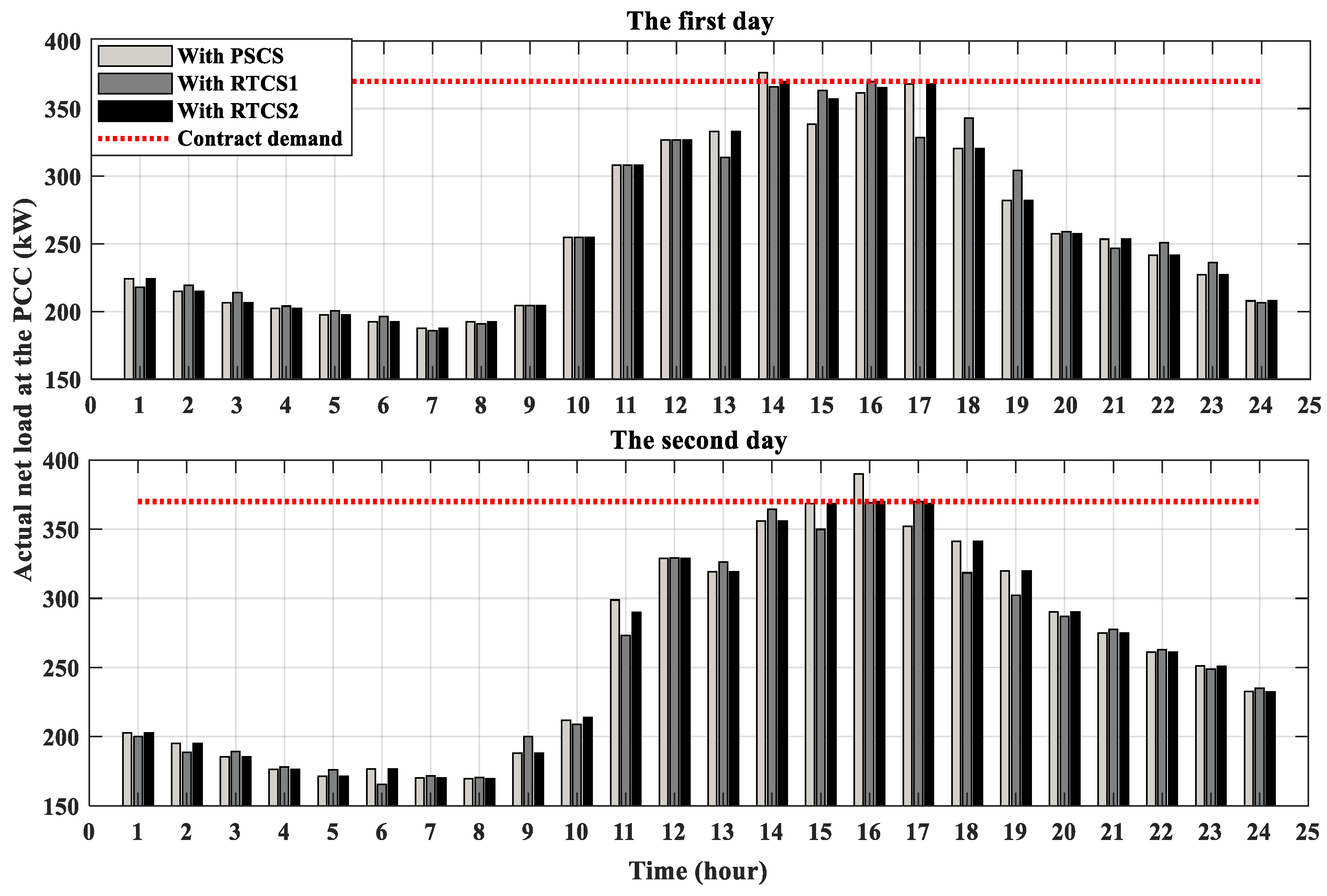
4.2. Performance Comparison of Real Time Control Schemes for a Sample Case
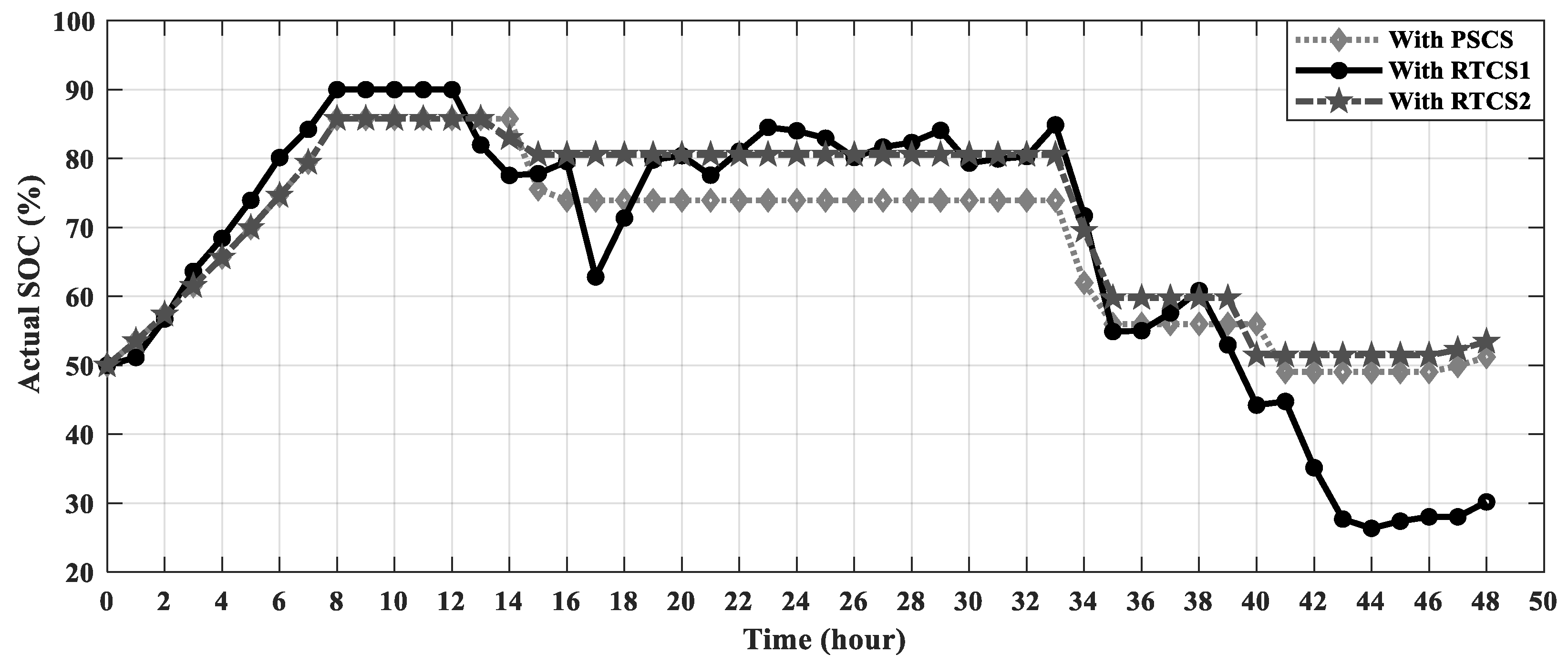
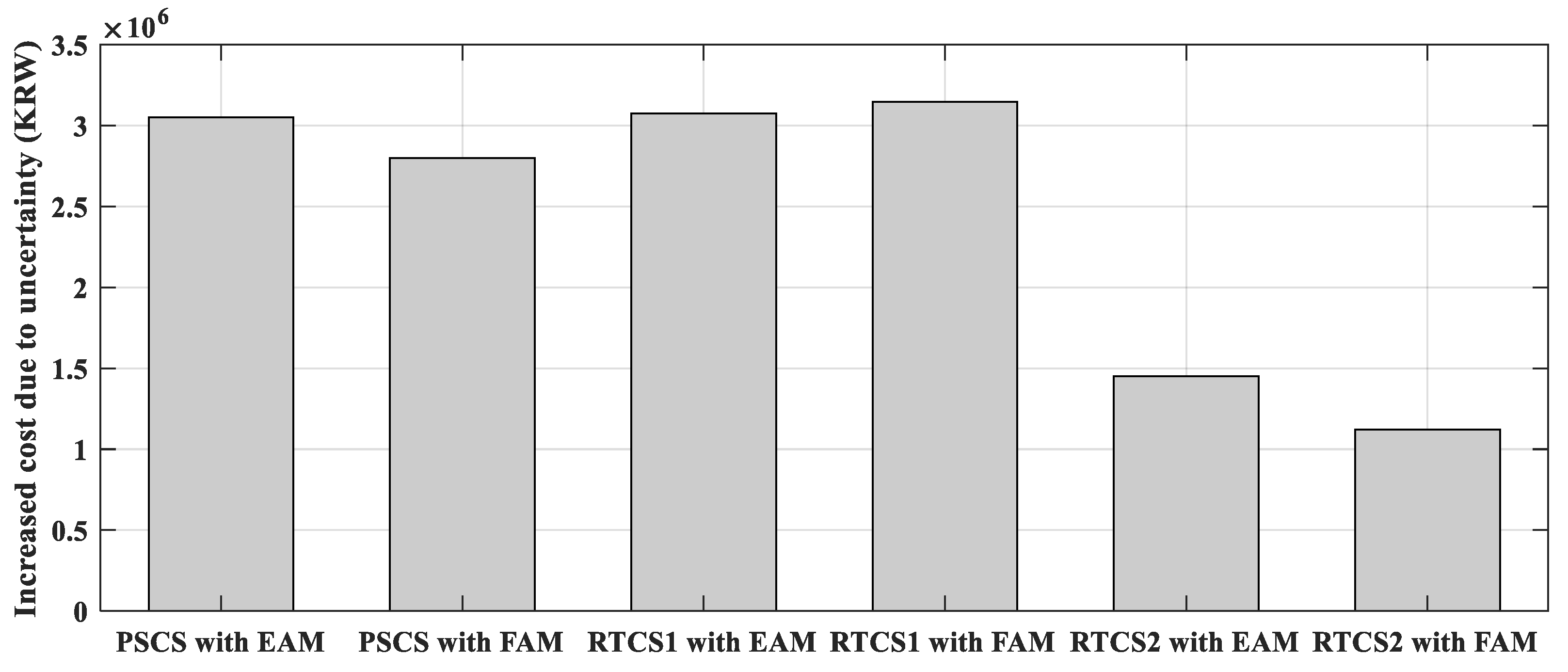
4.3. Performance Evaluation of the Proposed RTCS and Target SOC Assignment Method through Continuous Operation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Markets and Markets Home Page. Available online: http://marketsandmarkets.com/PressReleases (accessed on 20 December 2017).
- Telaretti, E.; Ippolito, M.; Dusonchet, L. A Simple Operating Strategy of Small-Scale Battery Energy Storages for Energy Arbitrage under Dynamic Pricing Tariffs. Energies 2015, 9, 12–31. [Google Scholar] [CrossRef]
- Jeong, M.G.; Moon, S.I.; Hwang, P.I. Indirect Load Control for Energy Storage Systems Using Incentive Pricing under Time-of-Use Tariff. Energies 2016, 9, 558–577. [Google Scholar] [CrossRef]
- Kriett, O.P.; Salani, M. Optimal Control of a Residential Microgrid. Energy 2012, 42, 321–330. [Google Scholar] [CrossRef]
- Park, Y.G.; Kim, C.W.; Park, J.B. MILP-Based Dynamic Efficiency Scheduling Model of Battery Energy Storage Systems. J. Electr. Eng. Technol. 2016, 11, 1063–1069. [Google Scholar] [CrossRef]
- Jin, J.L.; Xu, Y.J. Optimal Storage Operation Under Demand Charge. IEEE Trans. Power Syst. 2017, 32, 795–808. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, B.; Zhang, T.; Guo, B. An Intelligent Control Strategy of Battery Energy Storage System for Microgrid Energy Management under Forecast Uncertainties. Int. J. Electrochem. 2014, 9, 4190–4204. [Google Scholar]
- Alharbi, W.; Raahemifar, K. Probabilistic Coordination of Microgrid Energy Resources Operation Considering Uncertainties. Electr. Power Syst. Res. 2015, 128, 1–10. [Google Scholar] [CrossRef]
- Yi, J.; Lyons, F.P.; Davison, J.P.; Wang, P.; Taylor, C.P. Robust Scheduling Scheme for Energy Storage to Facilitate High Penetration of Renewables. IEEE Trans. Sustain. Energy 2016, 7, 797–807. [Google Scholar] [CrossRef]
- Serpi, A.; Porru, M.; Damiano, A. An Optimal Power and Energy Management by Hybrid Energy Storage Systems in Microgrids. Energies 2017, 10, 1909–1929. [Google Scholar] [CrossRef]
- Huo, Y.; Jiang, P.; Zhu, Y.; Feng, S.; Wu, X. Optimal Real-Time Scheduling of Wind Integrated Power System Presented with Storage and Wind Forecast Uncertainties. Energies 2015, 8, 1080–1100. [Google Scholar] [CrossRef]
- Palma-Behnke, R.; Benavides, C.; Lanas, F.; Severino, B.; Reyes, L.; Llanos, J.; Sáez, D. A Microgrid Energy Management System Based on the Rolling Horizon Strategy. IEEE Trans. Smart Grid 2013, 4, 996–1006. [Google Scholar] [CrossRef]
- Solanki, V.B.; Raghurajan, A.; Bhattacharya, K.; Cañizares, A.C. Including Smart Loads for Optimal Demand Response in Integrated Energy Management Systems for Isolated Microgrids. IEEE Trans. Smart Grid 2017, 8, 1739–1748. [Google Scholar] [CrossRef]
- Xu, J.; Zhang, R. Real-Time Energy Storage Management for Renewable Integration in Microgrid: An Off-Line Optimization Approach. IEEE Trans. Smart Grid 2015, 6, 124–134. [Google Scholar]
- Chalise, S.; Sternhagen, J.; Hansen, M.T.; Tonkoski, R. Energy Management of Remote Microgrids Considering Battery Lifetime. Electr. J. 2016, 29, 1–10. [Google Scholar] [CrossRef]
- Musallam, M.; Johnson, M.C. An Efficient Implementation of the Rainflow Counting Algorithm for Life Consumption Estimation. IEEE Trans. Reliability 2012, 61, 978–986. [Google Scholar] [CrossRef]
- Li, J.; Gee, M.A.; Zhang, M.; Yuan, W. Analysis of Battery Lifetime Extension in a SMES-battery Hybrid Energy Storage System Using A Novel Battery Lifetime Model. Energy 2015, 86, 175–185. [Google Scholar] [CrossRef] [Green Version]
- Choi, Y.; Kim, H. Optimal Scheduling of Energy Storage System for Self-Sustainable Base Station Operation Considering Battery Wear-Out Cost. Energies 2016, 9, 462–480. [Google Scholar] [CrossRef]
- Heymann, B.; Bonnans, F.J.; Silva, F.; Lanas, F.; Jimenez, G. Continuous Optimal Control Approaches to Microgrid Energy Management. Energy Syst. 2018, 9, 59–77. [Google Scholar] [CrossRef]
- Kim, C.H.; Koo, B.G.; Park, J.H. Short-term Electric Load Forecasting Using Data Mining Technique. J. Electr. Eng. Technol. 2012, 7, 807–813. [Google Scholar] [CrossRef]
- Nataraja, C.; Gorawar, M.B.; Shilpa, G.N.; Shri Harsha, J. Short Term Load Forecasting Using Time Series Analysis: A Case Study for Karnataka, India. Int. J. Eng. Sci. Innov. Technol. 2012, 1, 45–53. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation Condition | |||||
|---|---|---|---|---|---|
| Item | Value | Item | Value | Item | Value |
| 370 (kW) | 250 (kWh) | 300,000,000 (KRW) | |||
| 90% | 10% | 50% | |||
| 0.95 | 0.95 | EAM, FAM | |||
| 1.0 | 250 (kW) | 5550 (KRW/kW) | |||
| Control Scheme | Target SOC Assignment Method | Total Cost | No. of Days Contract Demand Is Violated |
|---|---|---|---|
| PSCS with perfect forecast (benchmark) | FAM | 33,234,401 KRW ($31,060) | 11 |
| PSCS | EAM | 36,286,370 KRW ($33,912) | 34 |
| FAM | 36,034,178 KRW ($33,677) | 34 | |
| RTCS1 | EAM | 36,308,593 KRW ($33,933) | 18 |
| FAM | 36,381,284 KRW ($34,001) | 18 | |
| RTCS2 | EAM | 34,686,720 KRW ($32,417) | 14 |
| FAM | 34,354,995 KRW ($32,107) | 11 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, H.-C.; Choi, J.-H.; Yun, S.-Y.; Lee, H.-J.; Ahn, S.-J. Optimal Scheduling and Real-Time Control Schemes of Battery Energy Storage System for Microgrids Considering Contract Demand and Forecast Uncertainty. Energies 2018, 11, 1371. https://doi.org/10.3390/en11061371
Gao H-C, Choi J-H, Yun S-Y, Lee H-J, Ahn S-J. Optimal Scheduling and Real-Time Control Schemes of Battery Energy Storage System for Microgrids Considering Contract Demand and Forecast Uncertainty. Energies. 2018; 11(6):1371. https://doi.org/10.3390/en11061371
Chicago/Turabian StyleGao, Hong-Chao, Joon-Ho Choi, Sang-Yun Yun, Hak-Ju Lee, and Seon-Ju Ahn. 2018. "Optimal Scheduling and Real-Time Control Schemes of Battery Energy Storage System for Microgrids Considering Contract Demand and Forecast Uncertainty" Energies 11, no. 6: 1371. https://doi.org/10.3390/en11061371
APA StyleGao, H. -C., Choi, J. -H., Yun, S. -Y., Lee, H. -J., & Ahn, S. -J. (2018). Optimal Scheduling and Real-Time Control Schemes of Battery Energy Storage System for Microgrids Considering Contract Demand and Forecast Uncertainty. Energies, 11(6), 1371. https://doi.org/10.3390/en11061371