A Class of Control Strategies for Energy Internet Considering System Robustness and Operation Cost Optimization




Abstract
:1. Introduction
2. System Modelling
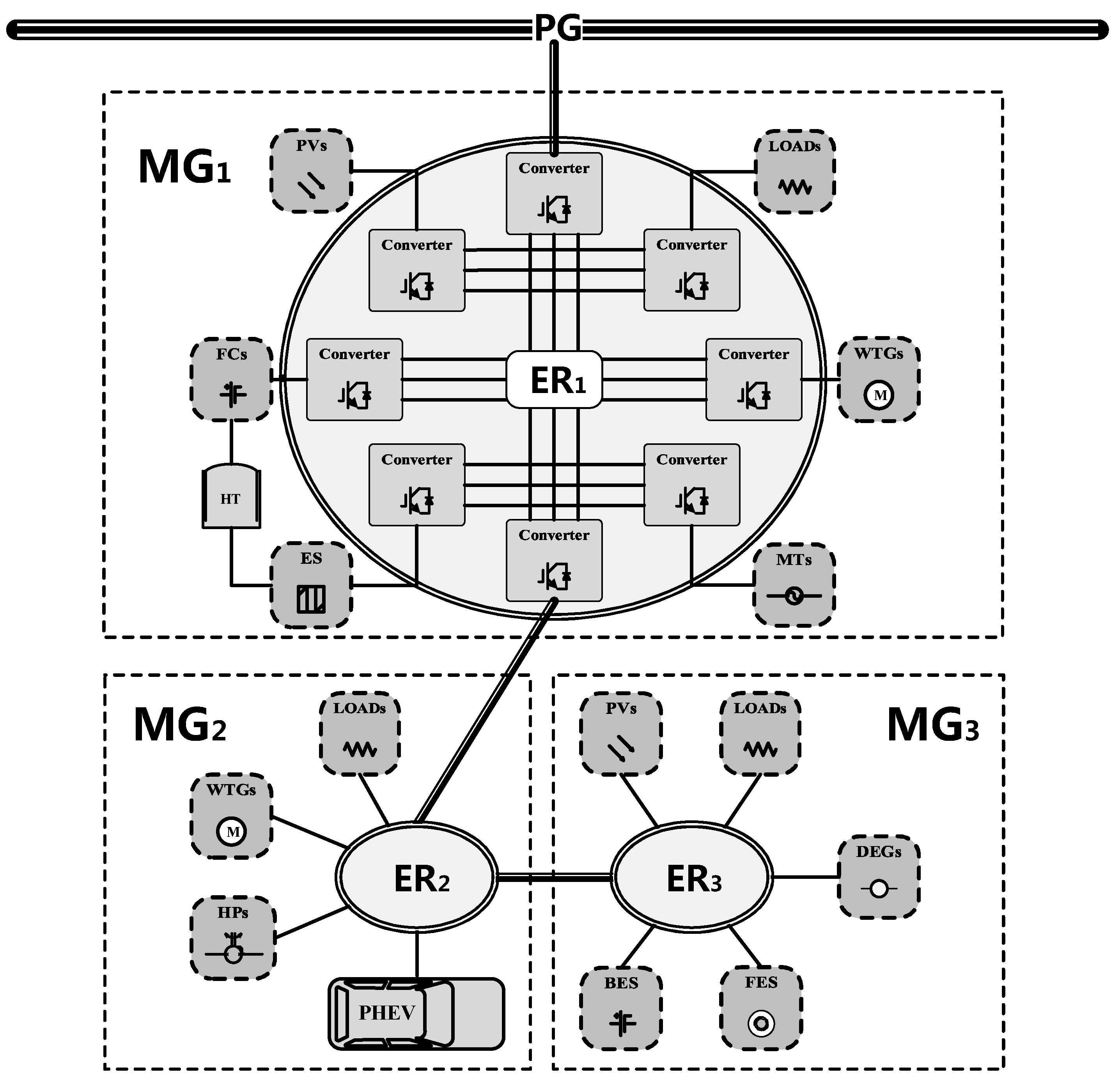
2.1. The Scenario of an EI
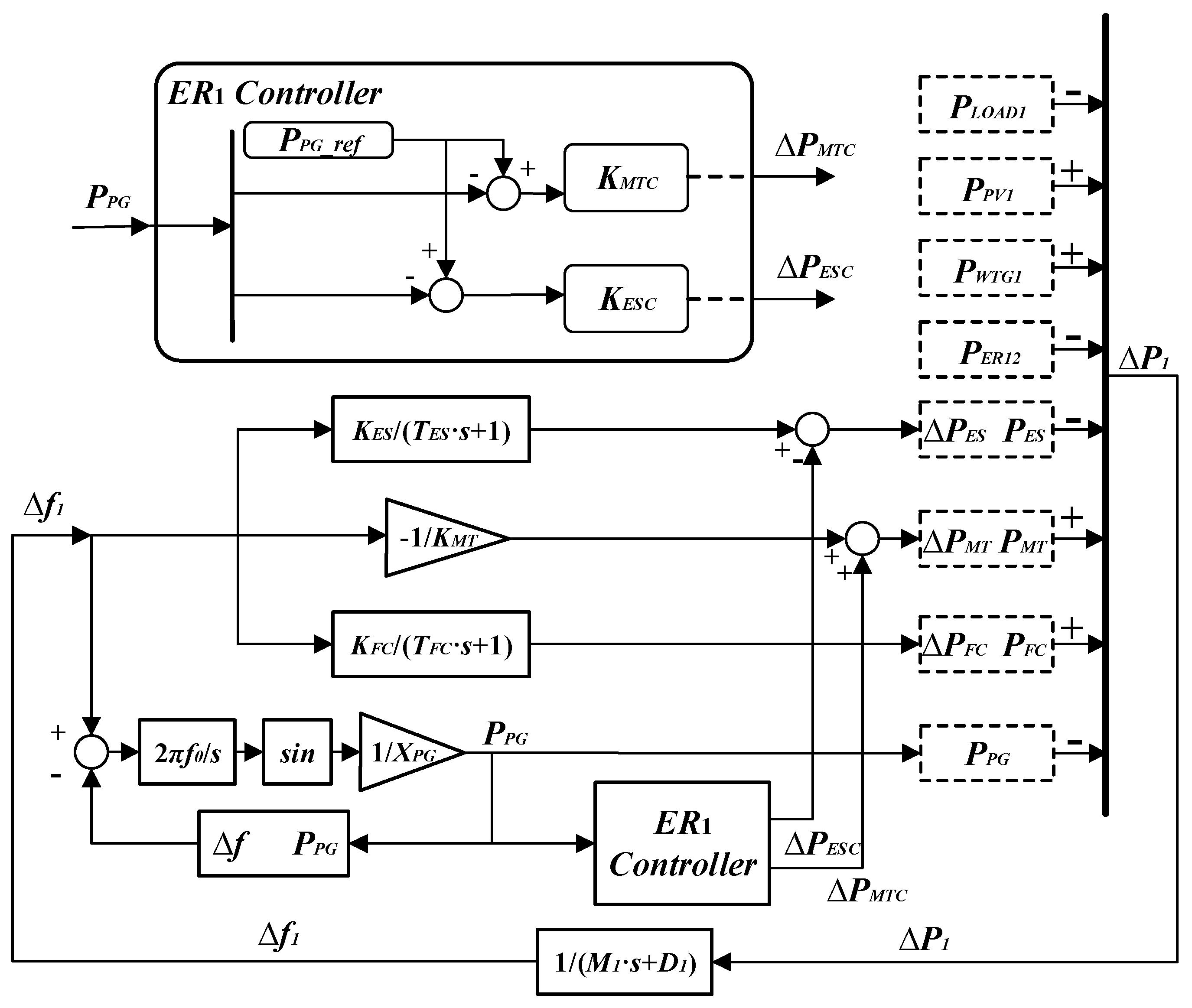
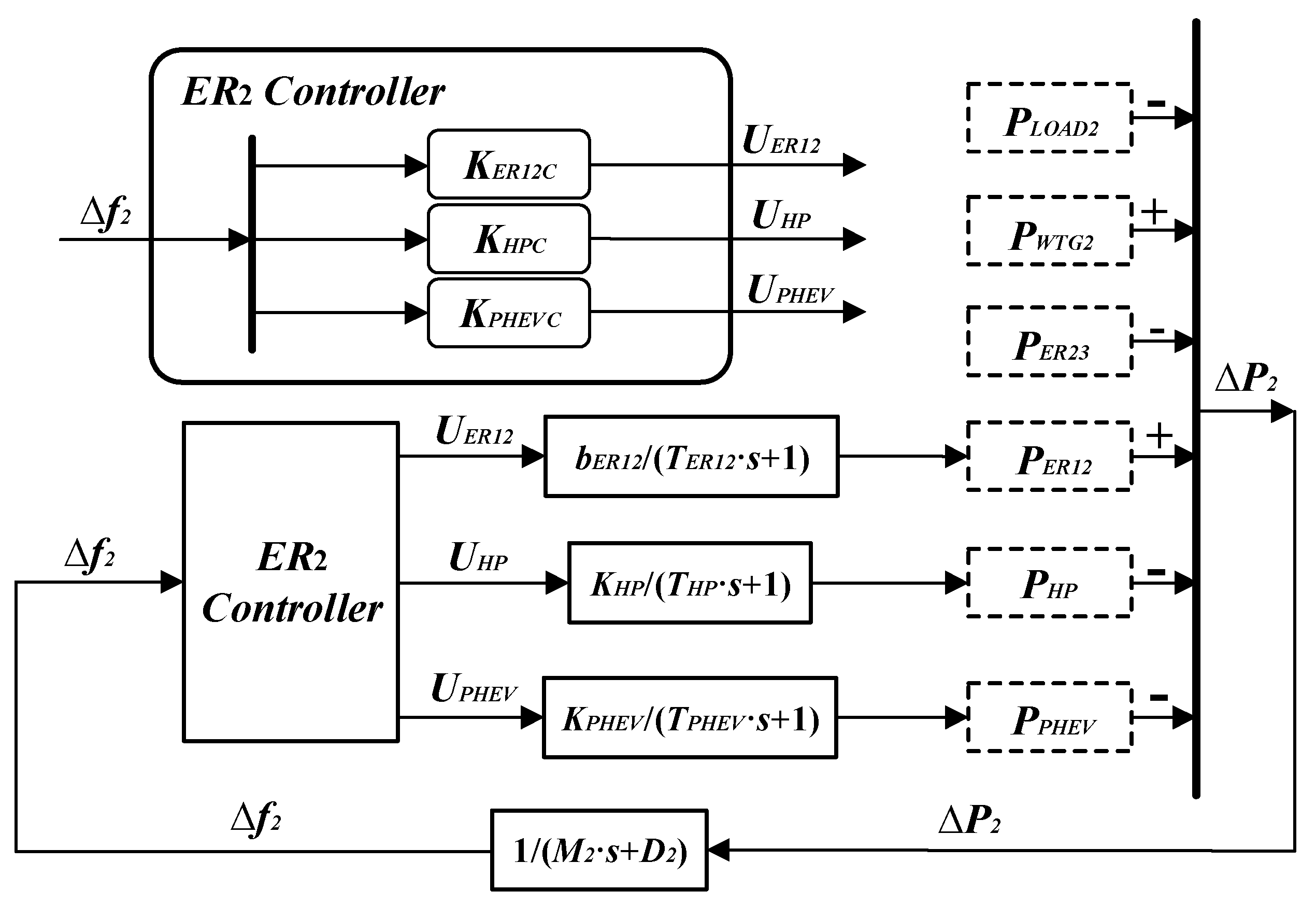
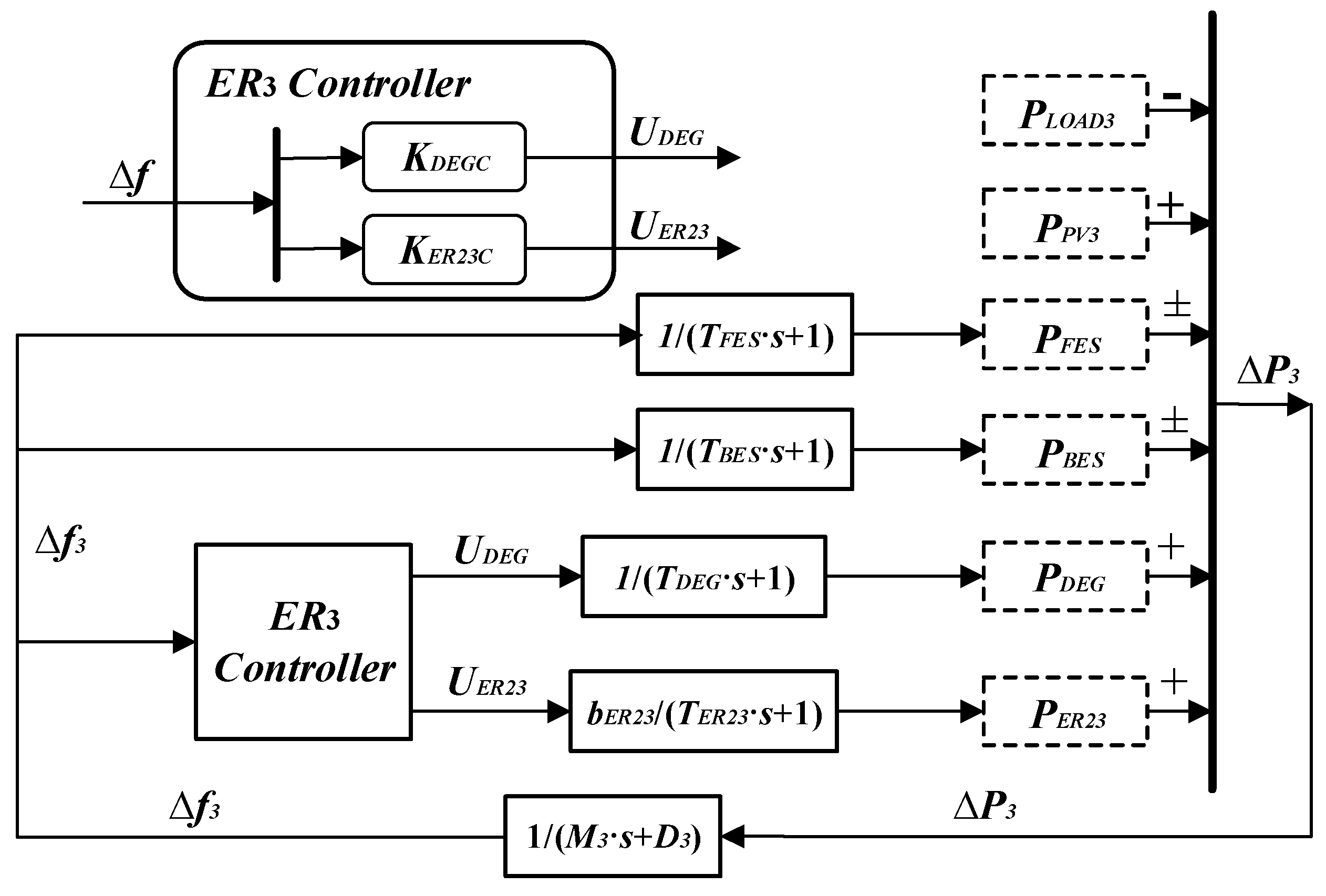
2.2. Linearized Block Diagram
3. Problem Formulation and Solution.
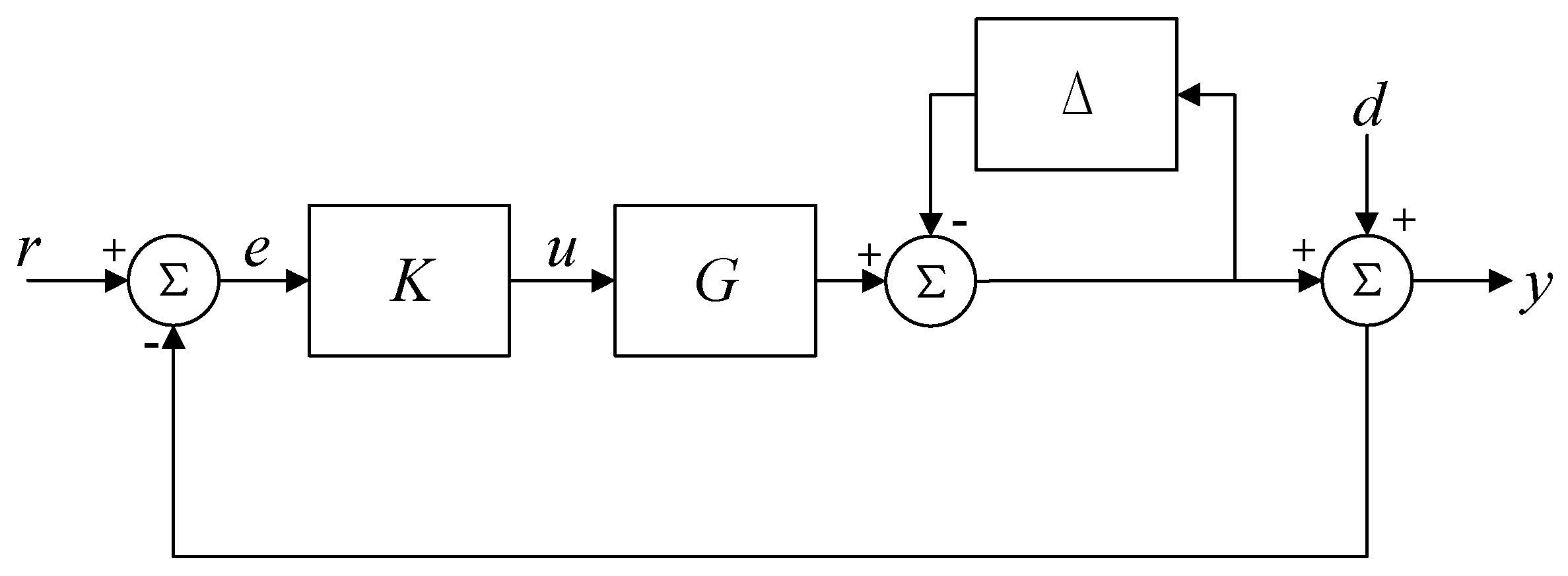
3.1. Robust Control for EI
3.2. Operation Cost Optimization
3.3. The Mixed Control Objective
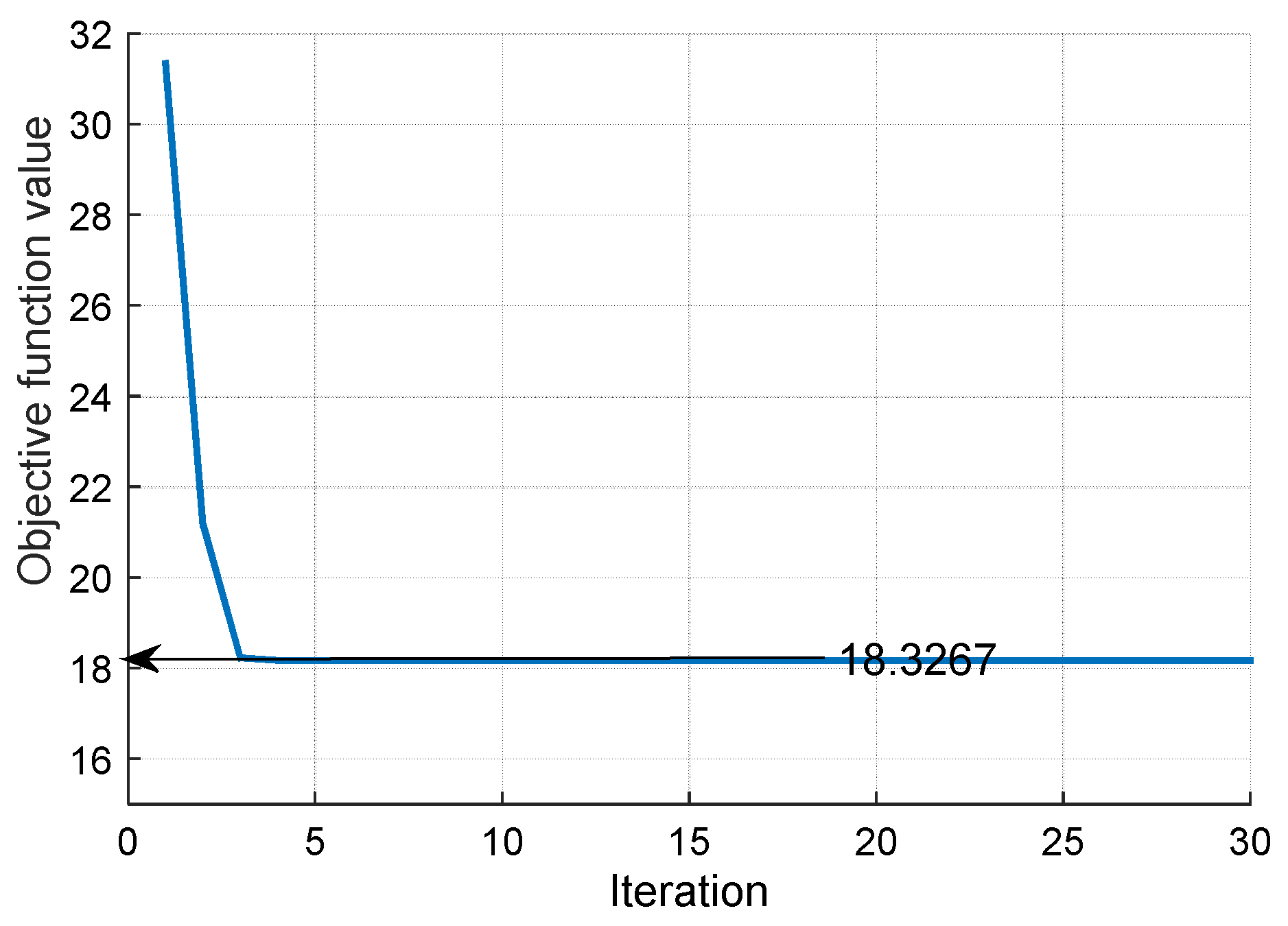
3.4. Solution to the Studied Control Problem
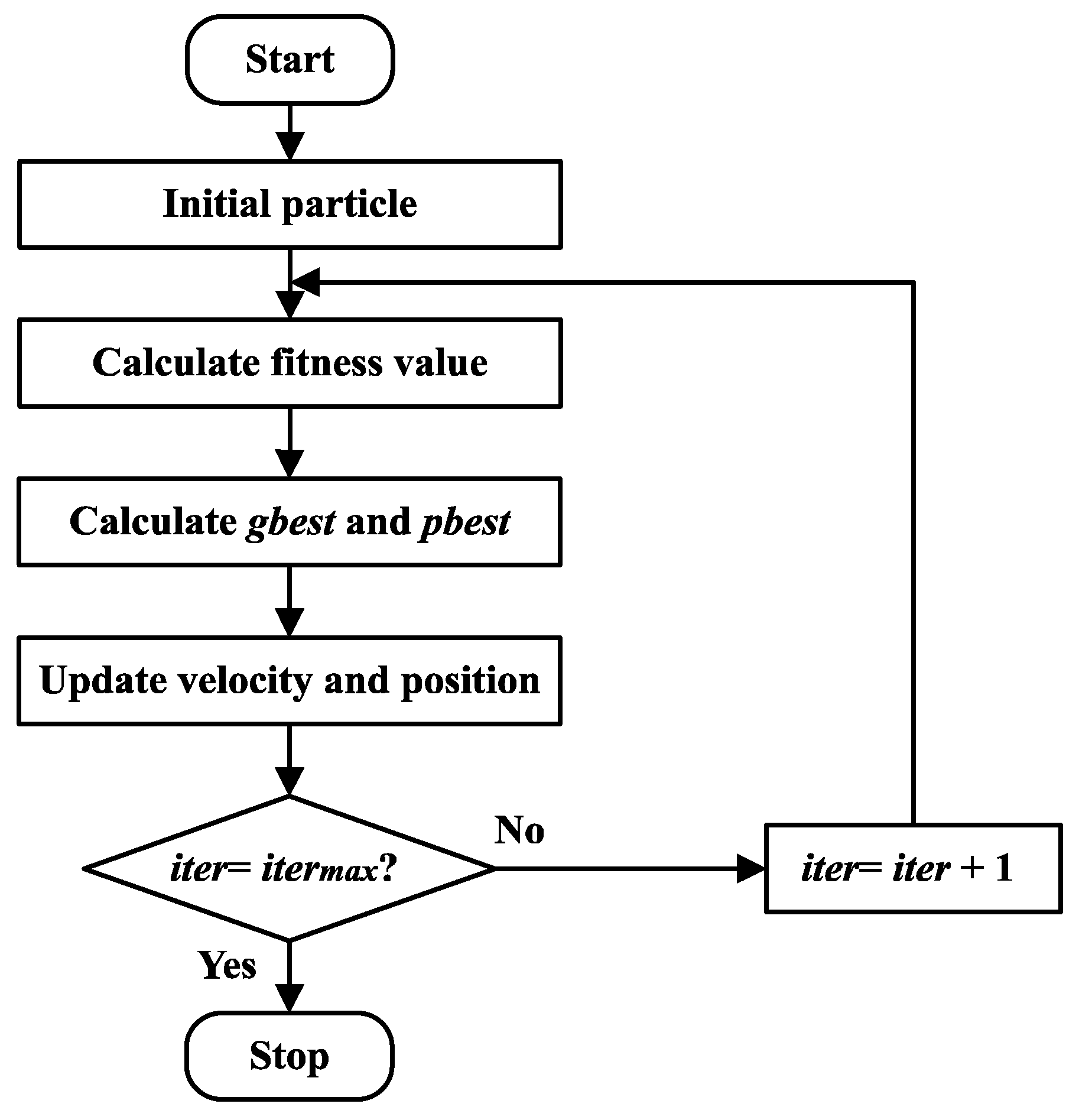
- Decide the numbers and the range of movement of the particles. Initialize them with random velocities and positions.
- Calculate the fitness value based on Equation (28) with the help of MATLAB (R2014b, MathWorks, Natick, MA, USA) μ-Analysis and Synthesis Toolbox.
- Calculate the best previously visited position and the global best position .
- Update the velocity and position of particle with the following equations:
- If is arrived, stop the circulation. Otherwise, go to process 2.
4. Simulation Results and Analysis
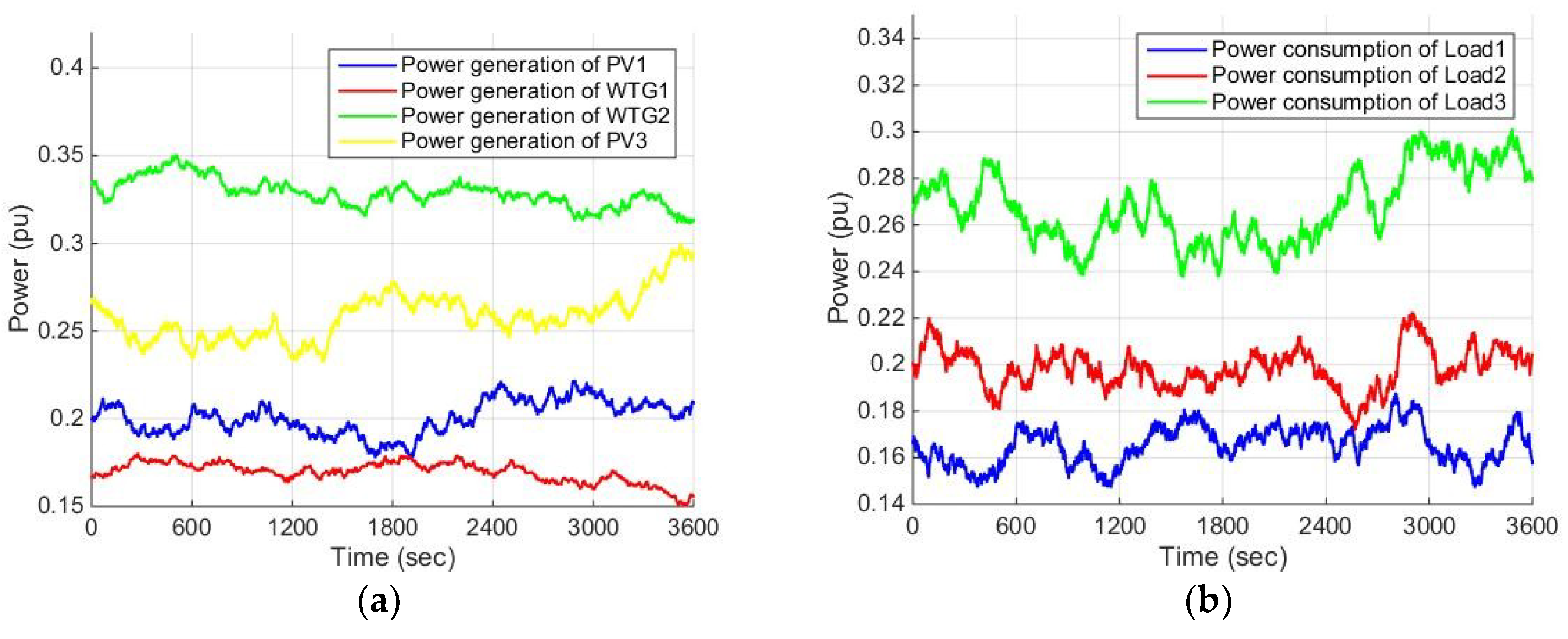
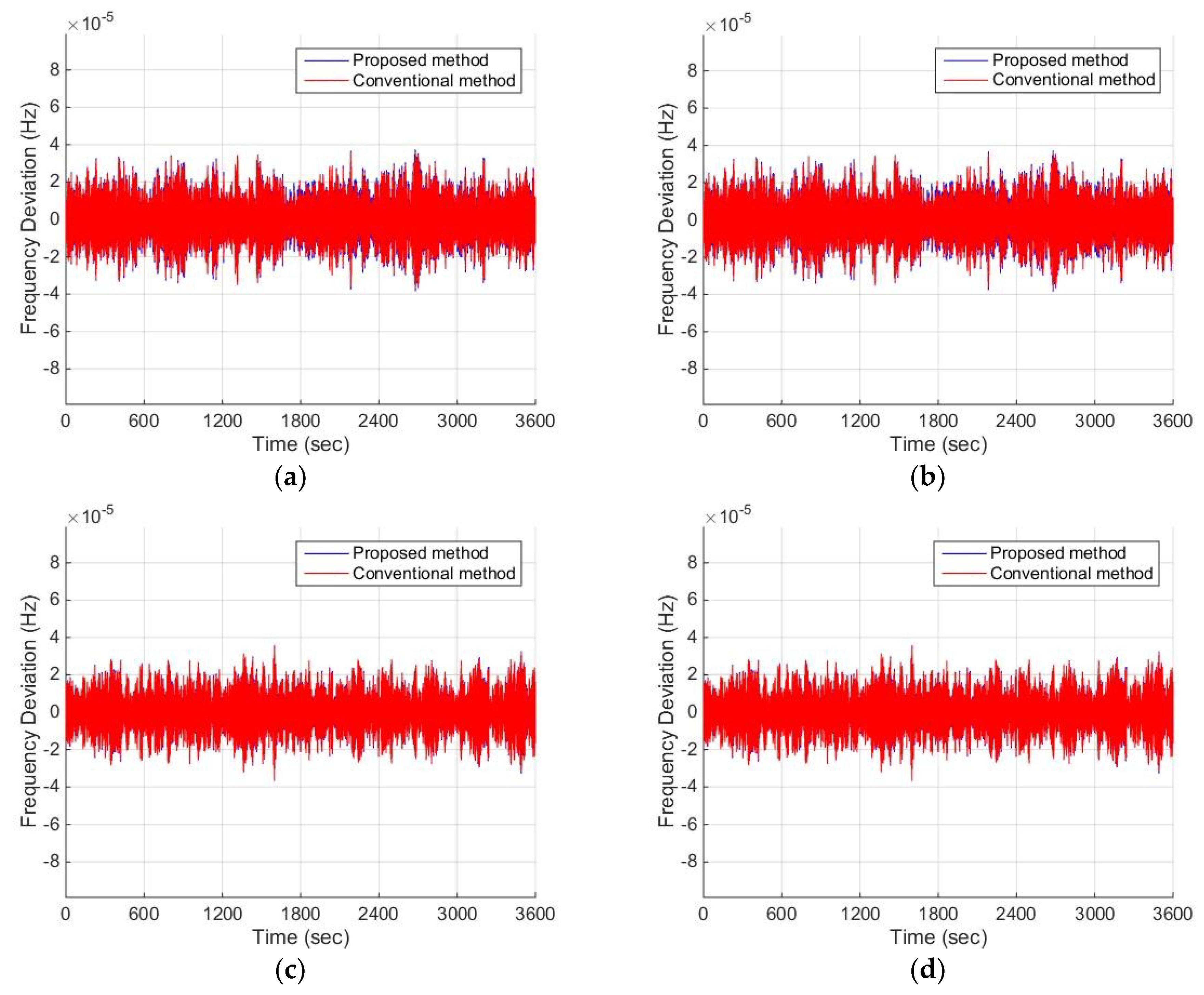
4.1. Simulation Results under the Proposed Controller
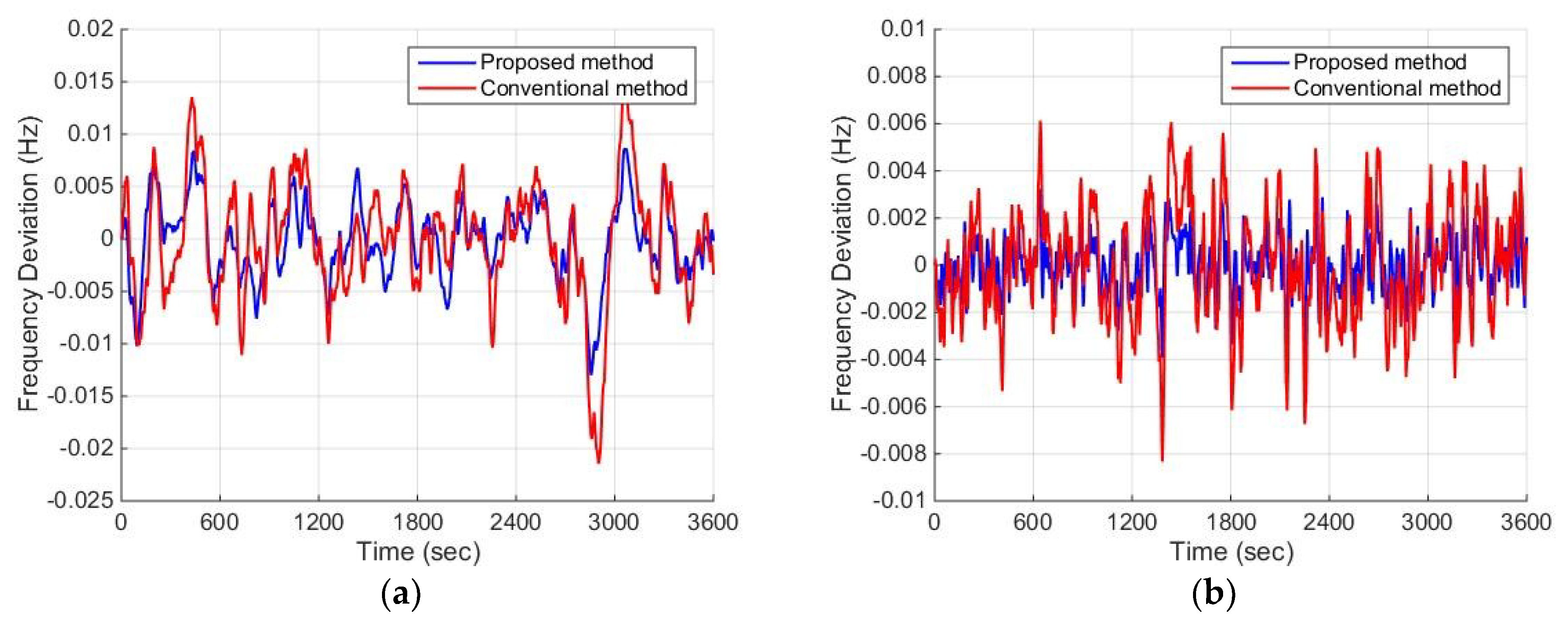
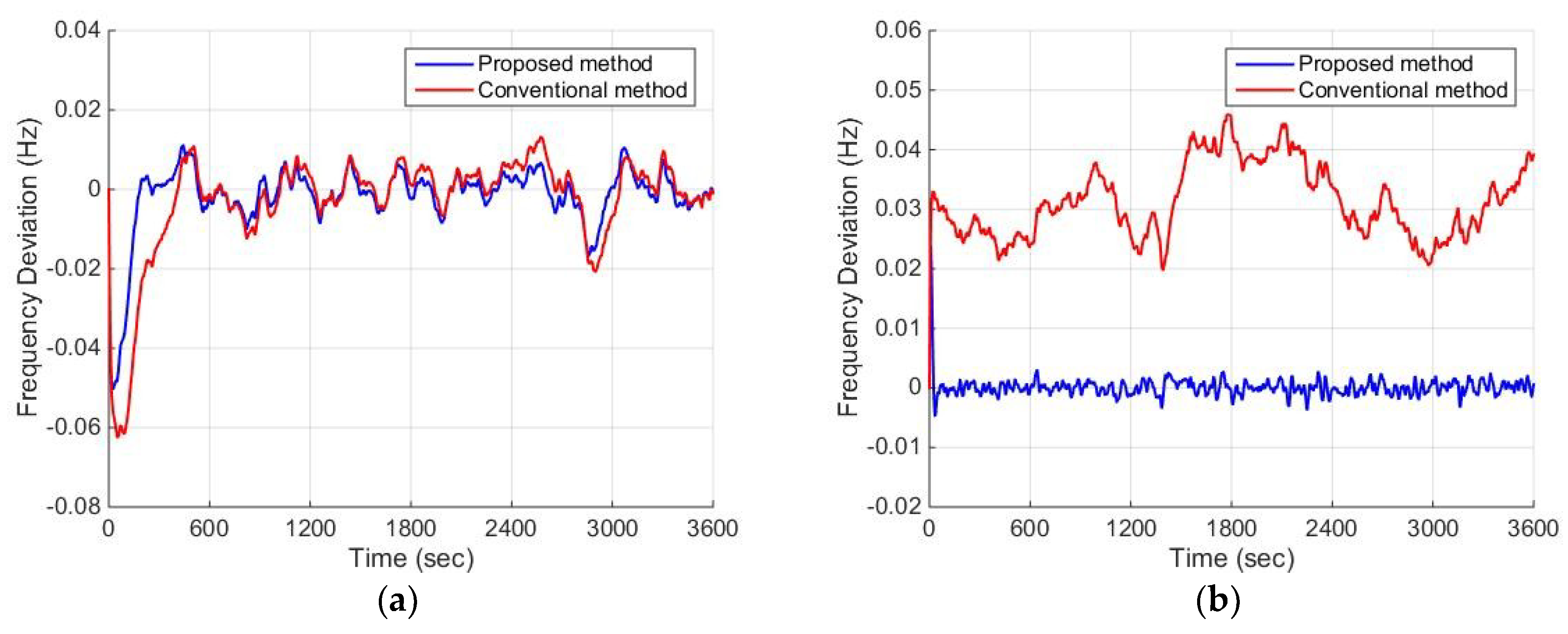
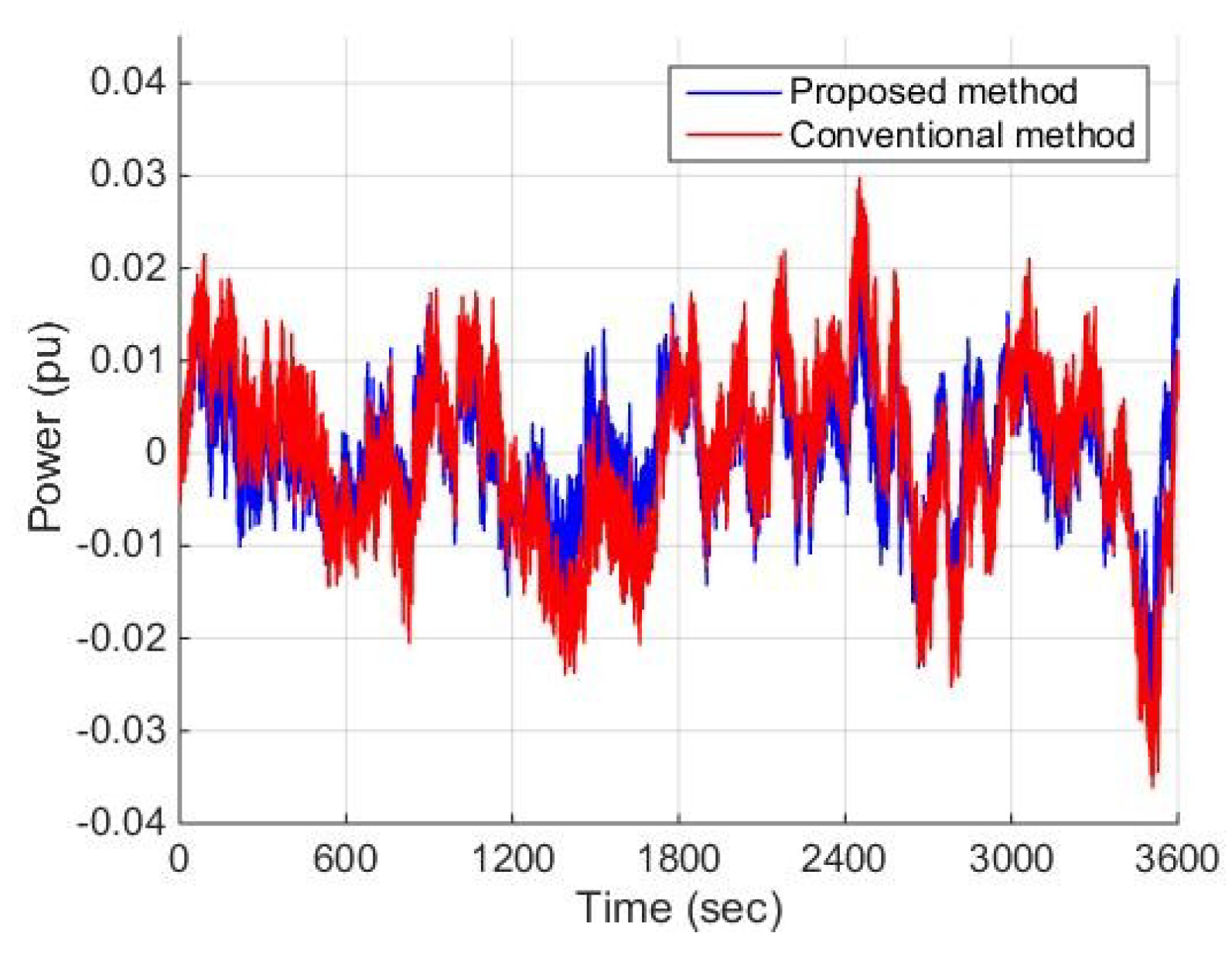
4.2. Comparing the Proposed Controller with the Optimal Controller
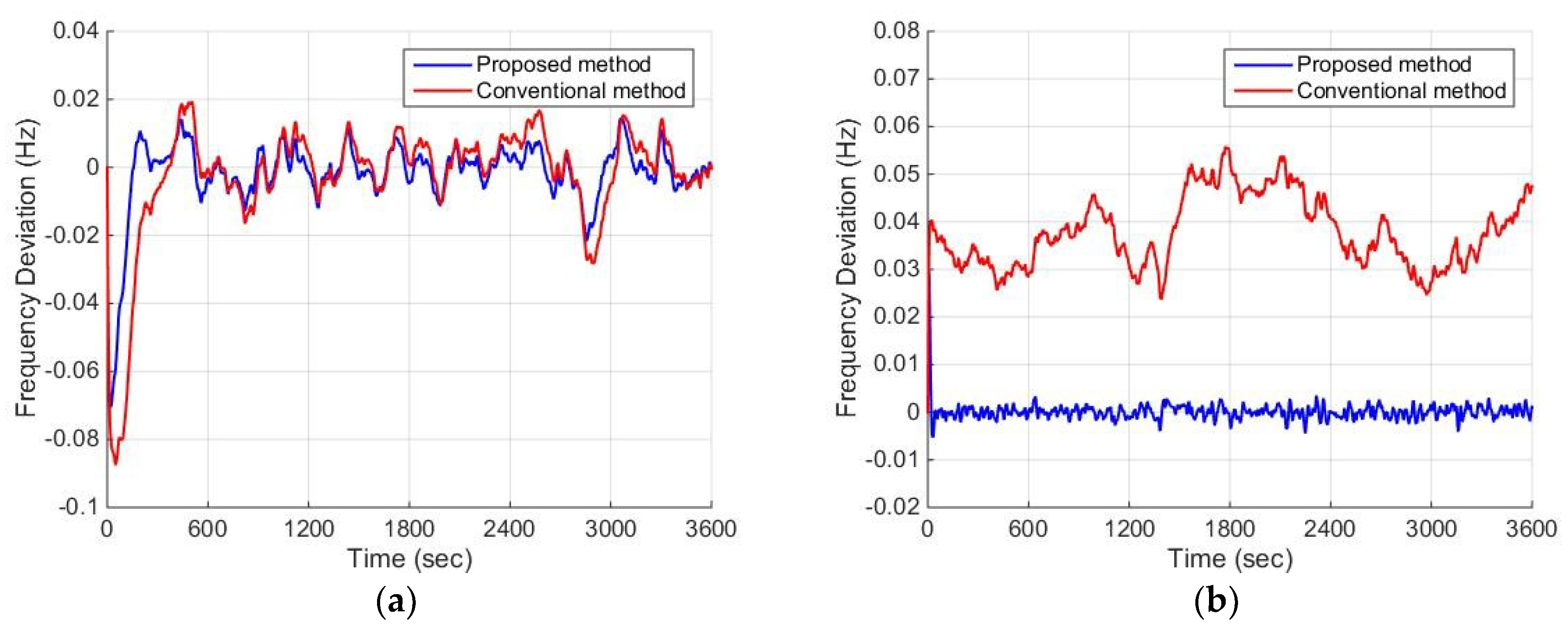
4.3. Comparing the Proposed Controller with the Robust Controller
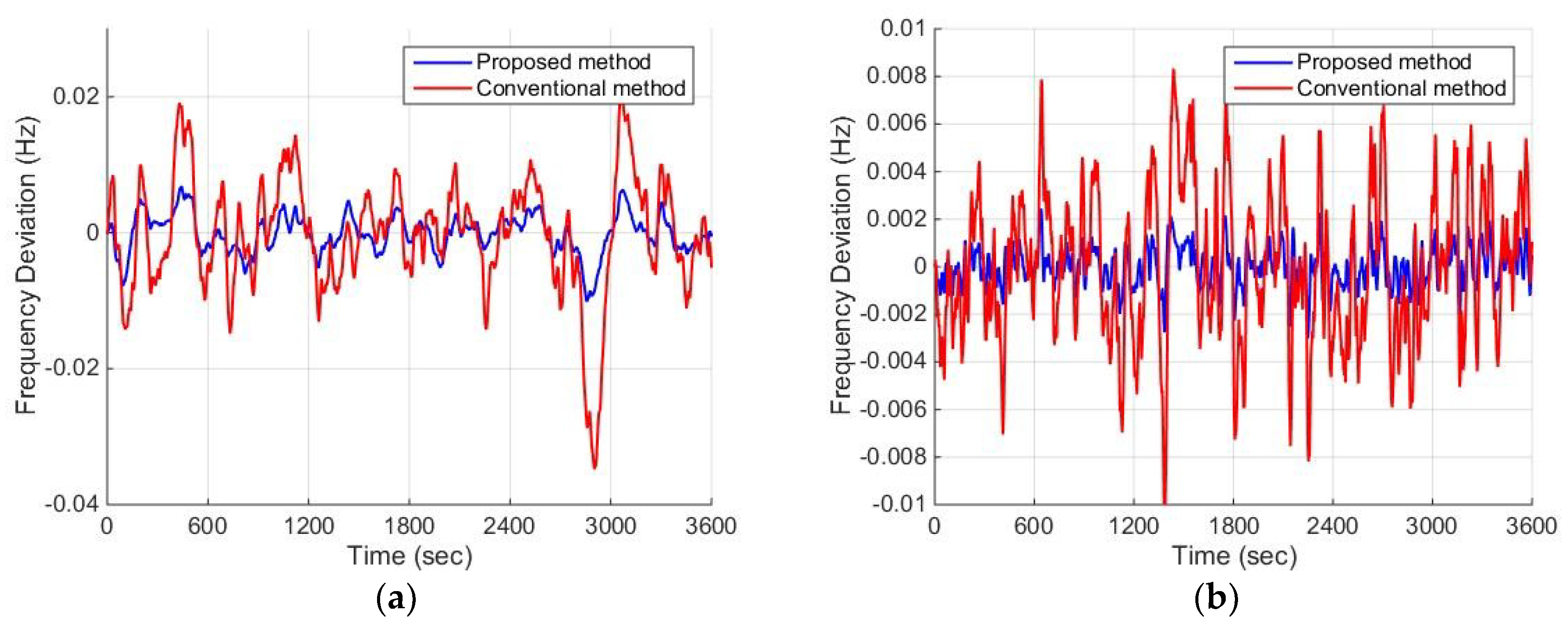
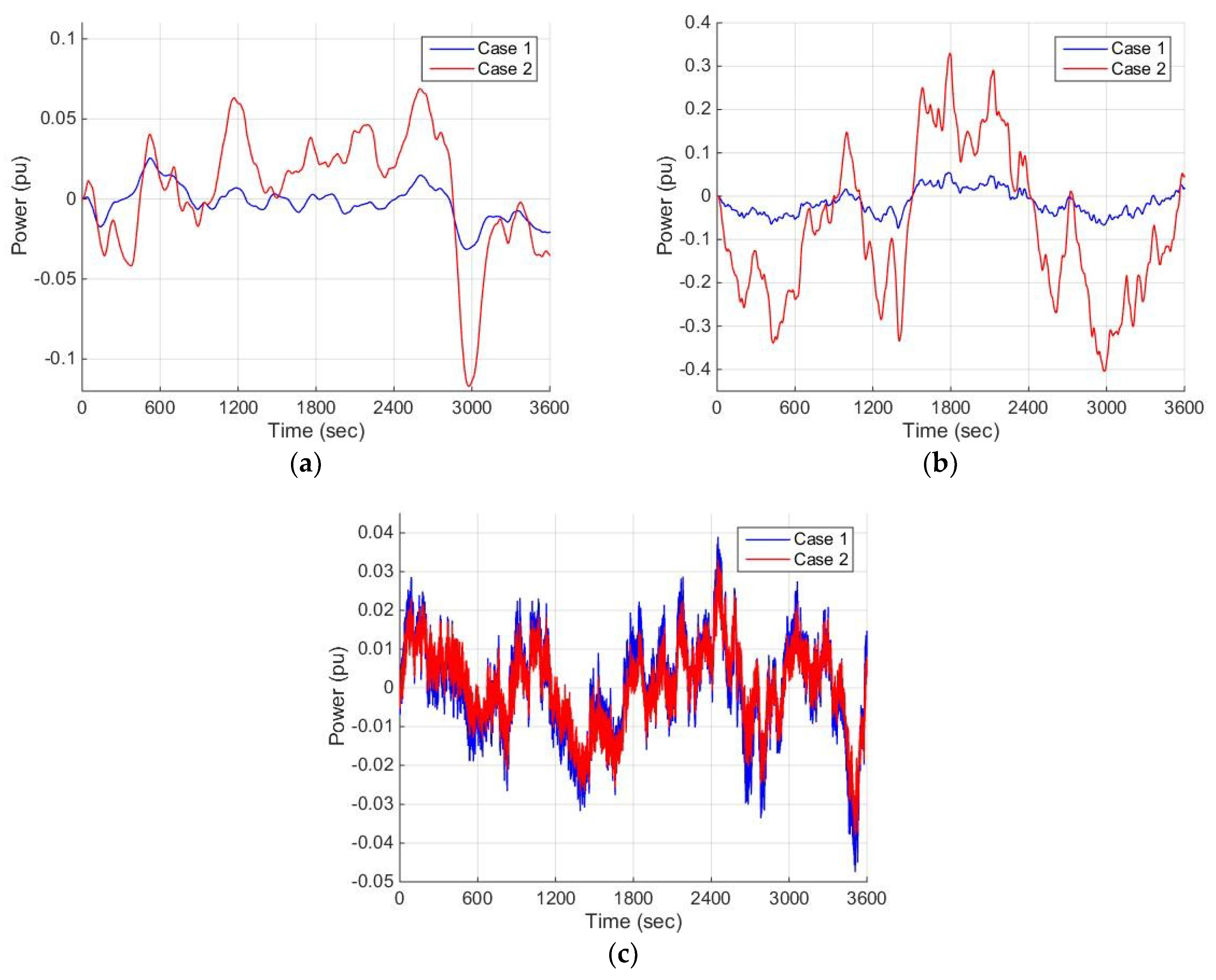
4.4. Some More Case Studeis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| BES | Battery energy storage |
| Damping coefficient in | |
| Damping coefficient in | |
| Damping coefficient in | |
| DEG | Diesel engine generator |
| DER | Distributed energy resource |
| EI | Energy Internet |
| ER | Energy router |
| Energy router in | |
| Energy router in | |
| Energy router in | |
| ES | Electrolyzer |
| FC | Fuel cell |
| FES | Flywheel energy storage |
| Frequency deviation of | |
| Frequency deviation of | |
| Frequency deviation of | |
| HP | Heat pump |
| HT | Hydrogen tank |
| PI controllers of DEGs | |
| Gain of ESs | |
| PI controllers of ESs | |
| Gain of FCs | |
| Gain of HPs | |
| PI controllers of HPs | |
| Gain of MTs | |
| PI controllers of MTs | |
| Gain of PHEVs | |
| PI controllers of PHEVs | |
| LFC | Load-frequency control |
| Inertia constant in | |
| Inertia constant in | |
| Inertia constant in | |
| MG | Microgrid |
| The first microgrid | |
| The second microgrid | |
| The third microgrid | |
| MT | Micro-turbine |
| PG | Power grid |
| PHEV | Plug-in hybrid electric vehicle |
| PI | Proportional integral |
| PSO | Particle swarm optimization |
| PV | Photovoltaic |
| Exchange power of BES | |
| Output power of DEGs | |
| Output power of ESs | |
| Output power of FCs | |
| Exchange power of FES | |
| Output power of HPs | |
| Power consumption of load1 | |
| power consumption of load2 | |
| power consumption of load3 | |
| Output power of MTs | |
| Output power of PHEVs | |
| Output power of PV units in | |
| Output power of PV units in | |
| Output power of WTGs in | |
| Output power of WTGs in | |
| Power deviation of | |
| Power deviation of | |
| Power deviation of | |
| Change of | |
| Control outputs of ESs | |
| Change of | |
| Change of | |
| Control outputs of MTs | |
| RES | Renewable energy source |
| Time constants of BES devices | |
| Time constants of DEGs | |
| Time constants of ESs | |
| Time constants of FCs | |
| Time constants of FES devices | |
| Time constants of HPs | |
| Time constants of PHEVs | |
| Control outputs of DEGs | |
| Control outputs of HPs | |
| Control outputs of PHEVs | |
| WTG | Wind turbine generator |
| PI controller of transmission line between and | |
| PI controller of transmission line between and | |
| Power transmission between and | |
| Power transmission between and | |
| Power transmission between PG and | |
| Time constant of transmission line between and | |
| Time constant of transmission line between and | |
| Control output of transmission line between and | |
| Control output of transmission line between and |
References
- Bhattacharya, M.; Paramati, S.R.; Ozturk, I.; Bhattacharya, S. The effect of renewable energy consumption on economic growth: evidence from top 38 countries. Appl. Energy 2016, 162, 733–741. [Google Scholar] [CrossRef]
- Bilgen, S.; Kaygusuz, K.; Sari, A. Renewable energy for a clean and sustainable future. Energy Sources 2004, 26, 1119–1129. [Google Scholar] [CrossRef]
- Venkataramanan, G.; Marnay, C. A larger role for microgrids. IEEE Power Energy Mag. 2008, 6, 78–82. [Google Scholar] [CrossRef]
- Kroposki, B.; Lasseter, R.; Ise, T.; Morozumi, S.; Papathanassiou, S.; Hatziargyriou, N. Making microgrids work. IEEE Power Energy Mag. 2008, 6, 40–53. [Google Scholar] [CrossRef]
- Mathiesen, B.V.; Lund, H.; Connolly, D.; Wenzel, H.; Østergaard, P.A.; Möller, B.; Nielsen, S.; Ridjan, I.; Karnøe, P.; Sperling, K.; et al. Smart energy systems for coherent 100% renewable energy and transport solutions. Appl. Energy 2015, 145, 139–154. [Google Scholar] [CrossRef]
- Sreedharan, P.; Farbes, J.; Cutter, E.; Woo, C.; Wang, J. Microgrid and renewable generation integration: University of California, San Diego. Appl. Energy 2016, 169, 709–720. [Google Scholar] [CrossRef]
- Odun-Ayo, T.; Crow, M.L. Structure-preserved power system transient stability using stochastic energy functions. IEEE Trans. Power Syst. 2012, 27, 1450–1458. [Google Scholar] [CrossRef]
- Olivares, D.; Mehrizi-Sani, A.; Etemadi, A.; Canizares, C.; Iravani, R.; Kazerani, M.; Hajimiragha, H.A.; Gomis-Bellmunt, O.; Saeedifard, M.; Palma-Behnke, R.; et al. Trends in microgrid control. IEEE Trans. Smart Grid 2014, 5, 1905–1919. [Google Scholar] [CrossRef]
- Chakrabortty, A.; Ilić, M.D. Control and Optimization Methods for Electric Smart Grids; Springer: New York, NY, USA, 2012. [Google Scholar]
- Rifkin, J. The Third Industrial Revolution: How Lateral Power Is Transforming Energy, the Economy, and the World; Palgrave Macmillan: New York, NY, USA, 2013; pp. 31–46. [Google Scholar]
- Cao, J.; Yang, M. Energy Internet—Towards smart grid 2.0. In Proceedings of the Fourth International Conference on Networking & Distributed Computing, Los Angeles, CA, USA, 21–24 December 2013; pp. 105–110. [Google Scholar]
- Tsoukalas, L.H.; Gao, R. From smart grids to an energy Internet-assumptions, architectures and requirements. Smart Grid and Renew. Energy 2009, 1, 18–22. [Google Scholar]
- Han, X.; Yang, F.; Bai, C.; Xie, G.; Ren, G.; Hua, H.; Cao, J. An open energy routing network for low-voltage distribution power grid. In Proceedings of the 1st IEEE International Conference on Energy Internet, Beijing, China, 17–21 April 2017; pp. 320–325. [Google Scholar]
- Geidl, M.; Koeppel, G.; Favre-Perrod, P.; Klokl, B. Energy hubs for the futures. IEEE Power Energy Mag. 2007, 5, 24–30. [Google Scholar] [CrossRef]
- Boyd, J. An internet-inspired electricity grid. IEEE Spectr. 2013, 50, 12–14. [Google Scholar] [CrossRef] [Green Version]
- Wu, J.; Guan, X. Coordinated multi-microgrids optimal control algorithm for smart distribution management system. IEEE Trans. Smart Grid 2013, 4, 2174–2181. [Google Scholar] [CrossRef]
- Niknam, T.; Azizipanah-Abarghooee, R.; Narimani, M.R. An efficient scenario-based stochastic programming framework for multi-objective optimal micro-grid operation. Appl. Energy 2012, 99, 455–470. [Google Scholar] [CrossRef]
- Elrayyah, A.; Cingoz, F.; Sozer, Y. Construction of nonlinear droop relations to optimize islanded microgrid operation. IEEE Trans. Ind. Appl. 2015, 51, 3404–3413. [Google Scholar] [CrossRef]
- Zheng, X.; Li, Q.; Li, P.; Ding, D. Cooperative optimal control strategy for microgrid under grid-connected and islanded modes. Int. J. Photoenergy 2014, 2014, 1–11. [Google Scholar] [CrossRef]
- Zhao, J.; Dörfler, F. Distributed control and optimization in DC microgrids. Automatica 2015, 61, 18–26. [Google Scholar] [CrossRef]
- Bevrani, H.; Feizi, M.R.; Ataee, S. Robust frequency control in an islanded microgrid: H∞ and μ-Synthesis approaches. IEEE Trans. Smart Grid 2016, 7, 706–717. [Google Scholar] [CrossRef]
- Baghaee, H.R.; Mirsalim, M.; Gharehpetian, G.B.; Talebi, H.A. A generalized descriptor-system robust H∞ control of autonomous microgrids to improve small and large signal stability considering communication delays and load nonlinearities. Int. J. Electr. Power Energy Syst. 2017, 92, 63–82. [Google Scholar] [CrossRef]
- Hua, H.; Cao, J.; Yang, G.; Ren, G. Voltage control for uncertain stochastic nonlinear system with application to energy Internet: non-fragile robust H∞ approach. J. Math. Anal. Appl. 2018, 463, 93–110. [Google Scholar] [CrossRef]
- Singh, V.P.; Mohanty, S.R.; Kishor, N.; Ray, P.K. Robust H-infinity load frequency control in hybrid distributed generation system. Int. J. Elect. Power Energy Syst. 2013, 46, 294–305. [Google Scholar] [CrossRef]
- Hua, H.; Qin, Y.; Cao, J. A class of optimal and robust controller design for islanded microgrid. In Proceedings of the IEEE 7th International Conference on Power and Energy Systems, Toronto, ON, Canada, 1–3 November 2017; pp. 111–116. [Google Scholar]
- Baghaee, H.R.; Mirsalim, M.; Gharehpetian, G.B.; Talebi, H.A. A decentralized robust mixed H2/H∞ voltage control scheme to improve small/large-signal stability and FRT capability of islanded multi-DER microgrid considering load disturbances. IEEE Syst. J. 2017, 1–12. [Google Scholar]
- Vachirasricirikul, S.; Ngamroo, I. Robust LFC in a smart grid with wind power penetration by coordinated V2G control and frequency controller. IEEE Trans. Smart Grid 2014, 5, 371–380. [Google Scholar] [CrossRef]
- Shayeghi, H.; Jalili, A.; Shayanfar, H.A. A robust mixed H2/H∞ based LFC of a deregulated power system including SMES. Energy Convers. Manag. 2008, 49, 2656–2668. [Google Scholar] [CrossRef]
- Ngamroo, I. Robust coordinated control of electrolyzer and PSS for stabilization of microgrid based on PID-based mixed H2/H∞ control. Renew. Energy 2012, 45, 16–23. [Google Scholar] [CrossRef]
- Farsangi, M.M.; Song, Y.H.; Tan, M. Multi-objective design of damping controllers of FACTS devices via mixed H2/H∞ with regional pole placement. Int. J. Elect. Power Energy Syst. 2003, 25, 339–346. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the IEEE International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar]
- Li, X.; Song, Y.J.; Han, S.B. Study on power quality control in multiple renewable energy hybrid microgrid system. In Proceedings of the 2007 IEEE Lausanne Power Tech, Lausanne, Switzerland, 1–5 July 2007; pp. 2000–2005. [Google Scholar]
- Vachirasricirikul, S.; Ngamroo, I. Robust controller design of heat pump and plug-in hybrid electric vehicle for frequency control in a smart microgrid based on specified-structure mixed H2/H∞ control technique. Appl. Energy 2011, 88, 3860–3868. [Google Scholar] [CrossRef]
- Gu, D.W.; Petkov, P.H.; Konstantinov, M.M. Robust Control Design with MATLAB; Springer: New York, NY, USA, 2005. [Google Scholar]
- Jiang, Z.P.; Teel, A.R.; Praly, L. Small-gain theorem for ISS systems and applications. Math. Control Signals Syst. 1994, 7, 95–120. [Google Scholar] [CrossRef]
- Ho, S.J.; Ho, S.Y.; Hung, M.H.; Shu, L.S.; Huang, H.L. Designing structure-specified mixed H2/H∞ optimal controllers using an intelligent genetic algorithm IGA. IEEE Trans. Control Syst. Technol. 2005, 13, 1119–1124. [Google Scholar]
- Carpinelli, G.; Mottola, F.; Proto, D. A multi-objective approach for microgrid scheduling. IEEE Trans. Smart Grid 2017, 8, 2109–2118. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Parameters | Value | Parameters | Value |
|---|---|---|---|---|---|
| 10 | 100 | 0.04 | |||
| 1 | 60 | 2 | |||
| 15 | 10 | 10 | |||
| 2 | 1.15 | 1.15 | |||
| 20 | 0.072 | 0.15 | |||
| 1.5 | 50 | 0.12 | |||
| 10 | 10 | - | - | ||
| 0.2 | 0.3 | - | - |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hua, H.; Hao, C.; Qin, Y.; Cao, J. A Class of Control Strategies for Energy Internet Considering System Robustness and Operation Cost Optimization. Energies 2018, 11, 1593. https://doi.org/10.3390/en11061593
Hua H, Hao C, Qin Y, Cao J. A Class of Control Strategies for Energy Internet Considering System Robustness and Operation Cost Optimization. Energies. 2018; 11(6):1593. https://doi.org/10.3390/en11061593
Chicago/Turabian StyleHua, Haochen, Chuantong Hao, Yuchao Qin, and Junwei Cao. 2018. "A Class of Control Strategies for Energy Internet Considering System Robustness and Operation Cost Optimization" Energies 11, no. 6: 1593. https://doi.org/10.3390/en11061593
APA StyleHua, H., Hao, C., Qin, Y., & Cao, J. (2018). A Class of Control Strategies for Energy Internet Considering System Robustness and Operation Cost Optimization. Energies, 11(6), 1593. https://doi.org/10.3390/en11061593