Small-Scale Modular Multilevel Converter for Multi-Terminal DC Networks Applications: System Control Validation

 ,
, 

Abstract
:1. Introduction
2. Structure of MMC and Control Strategies
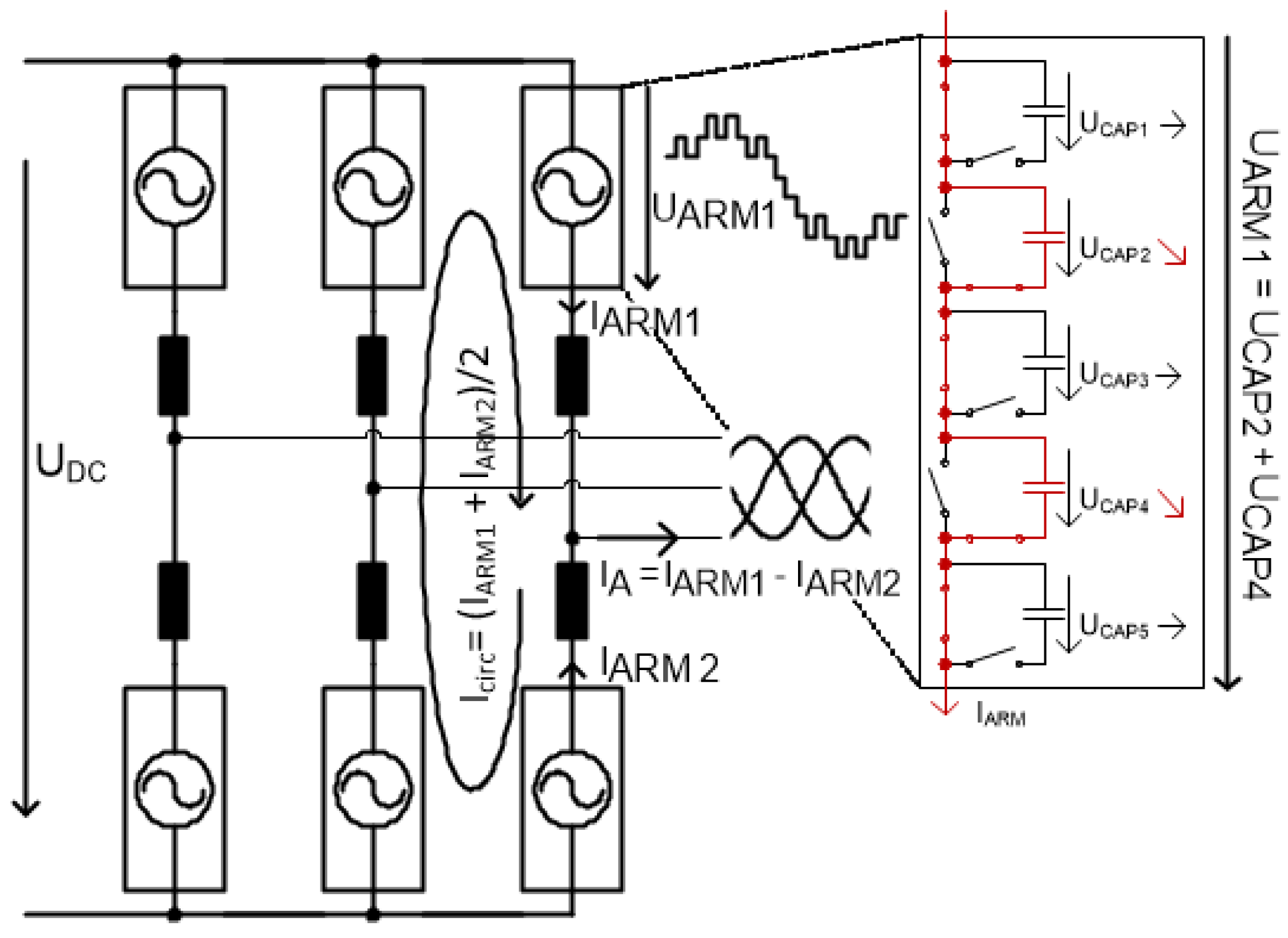
2.1. Structure
2.2. Converter-Level Control
2.2.1. Modulation Strategies of MMC
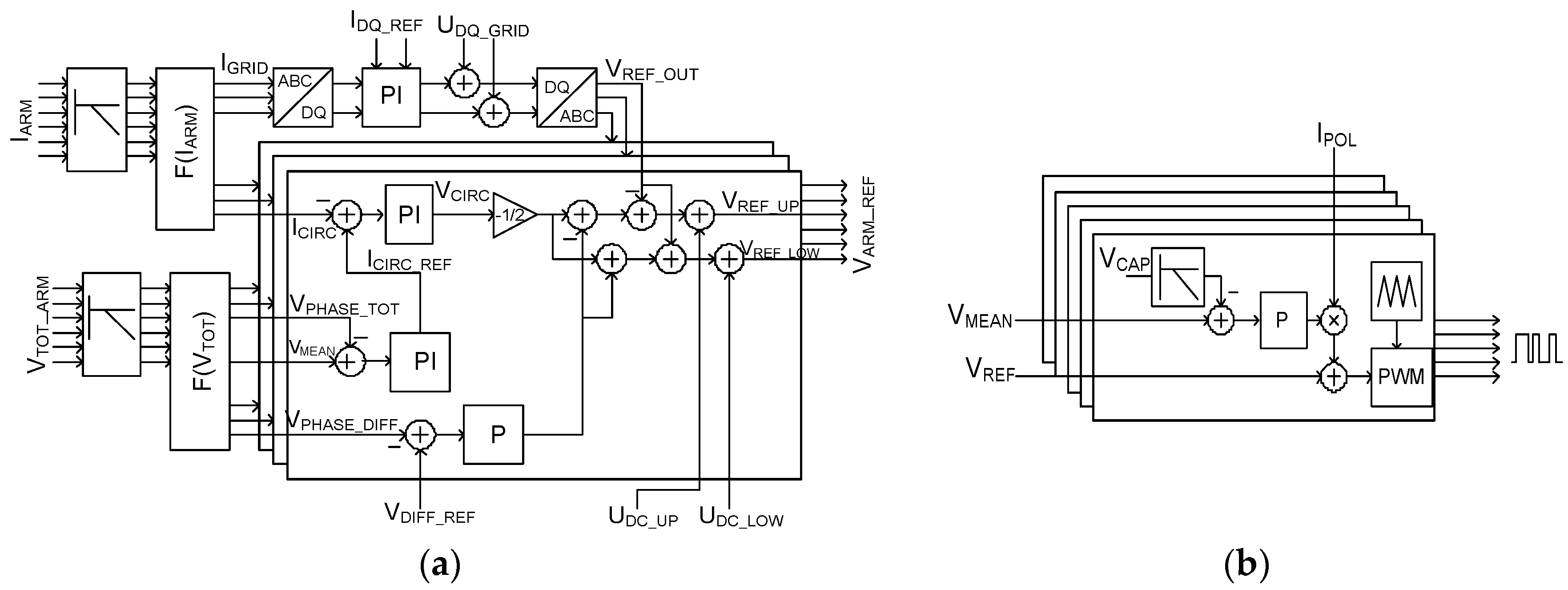
2.2.2. Output Current and Energy Stored Control
2.2.3. Capacitor Voltage Balancing
2.3. MTDC Control Strategies
3. MMC Control System Design
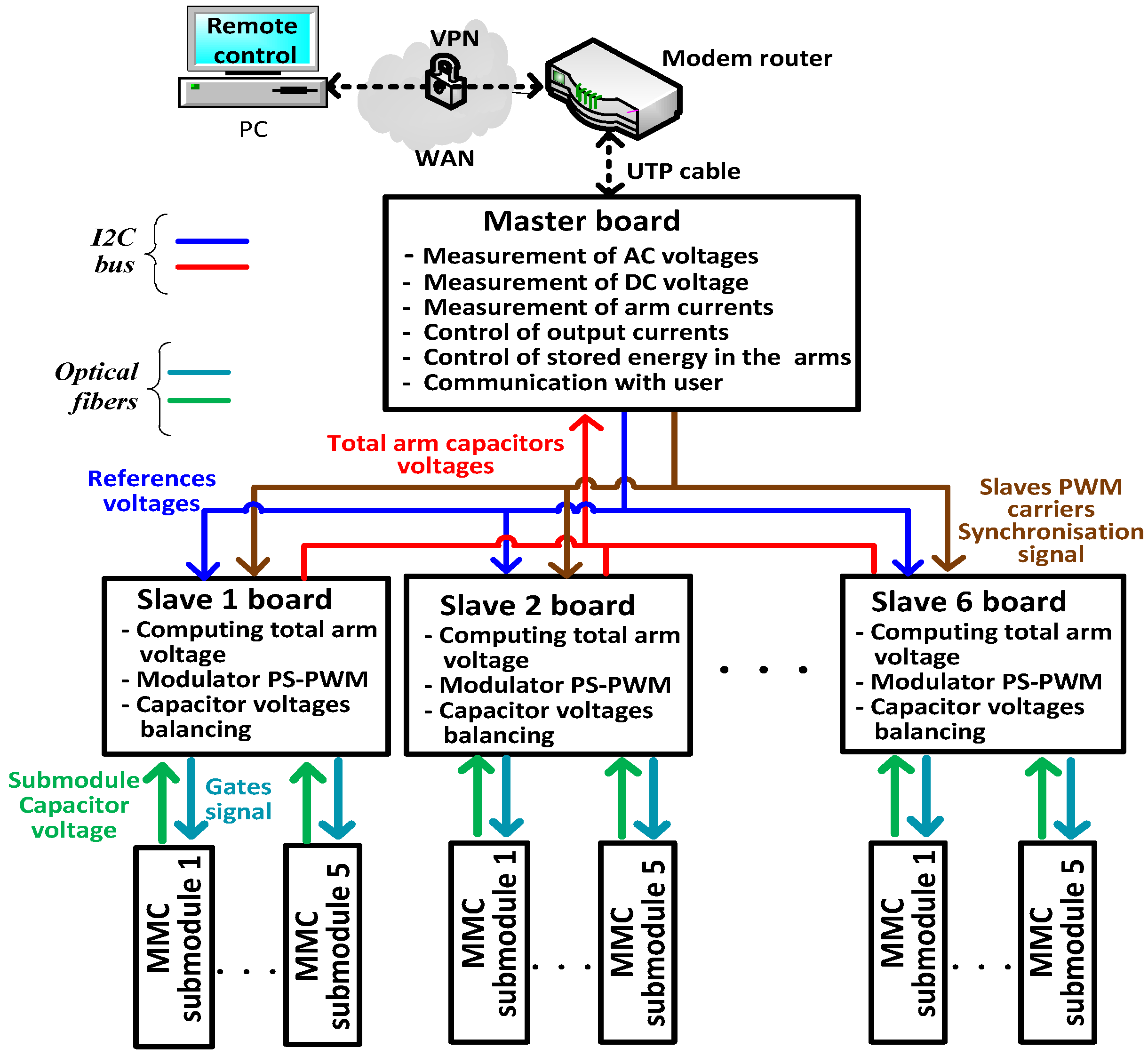
3.1. Overall Controller Operation
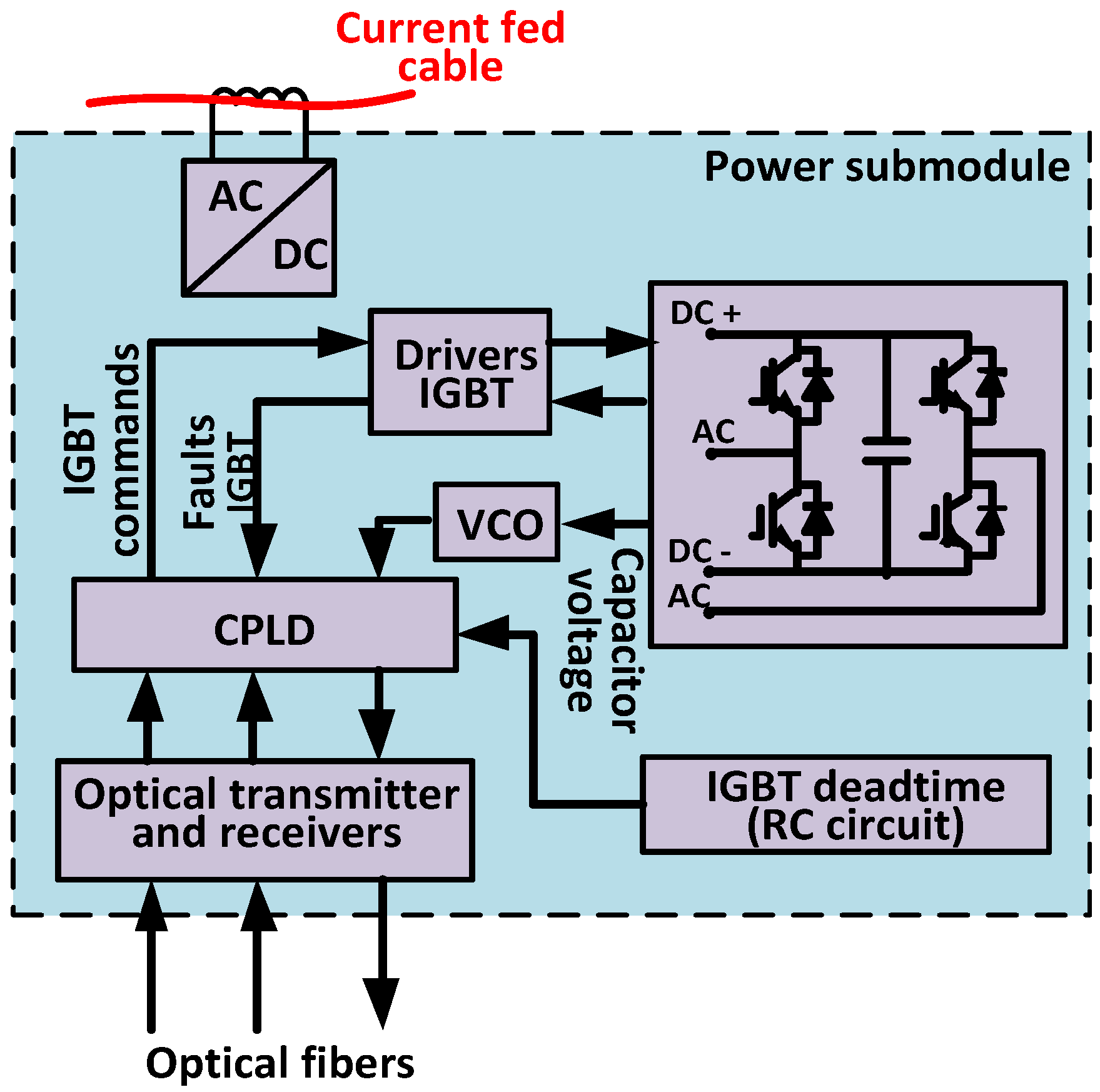
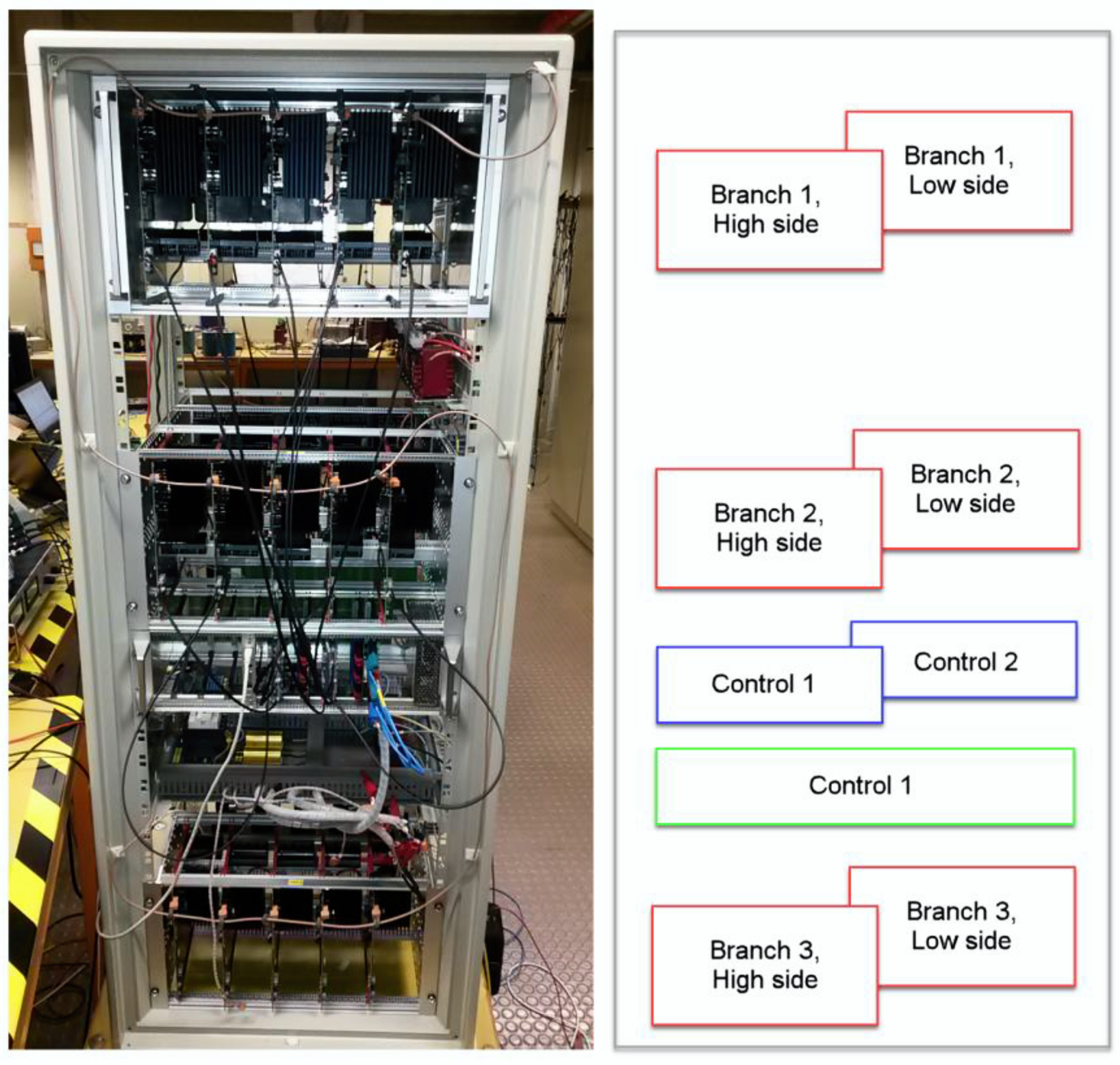
3.2. Slave Controllers and Power Modules
3.3. Master Controller
3.3.1. User Communication
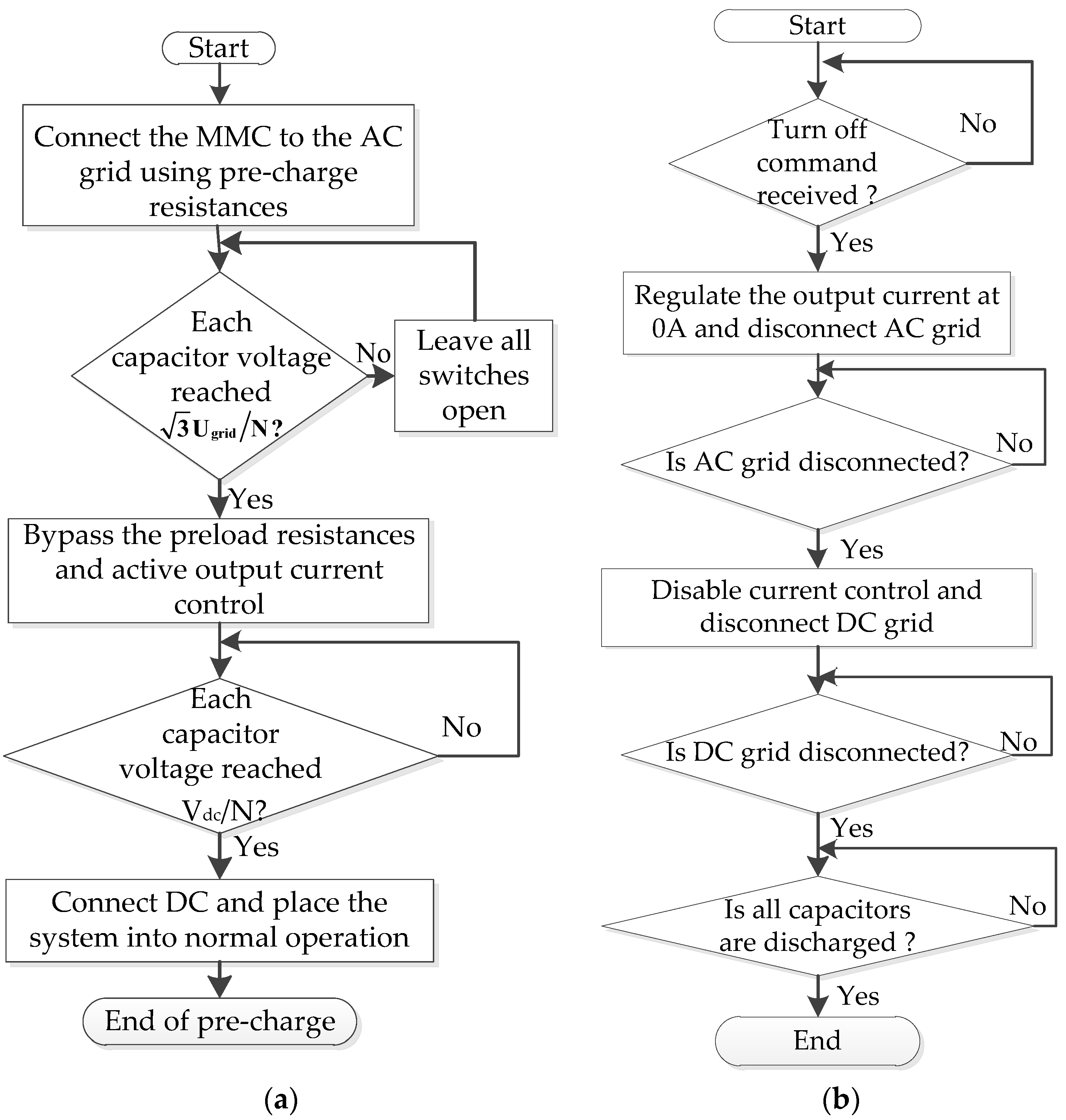
3.3.2. Start and Stop Tasks
3.3.3. Current and Voltage Measurements and Energy Flow Control
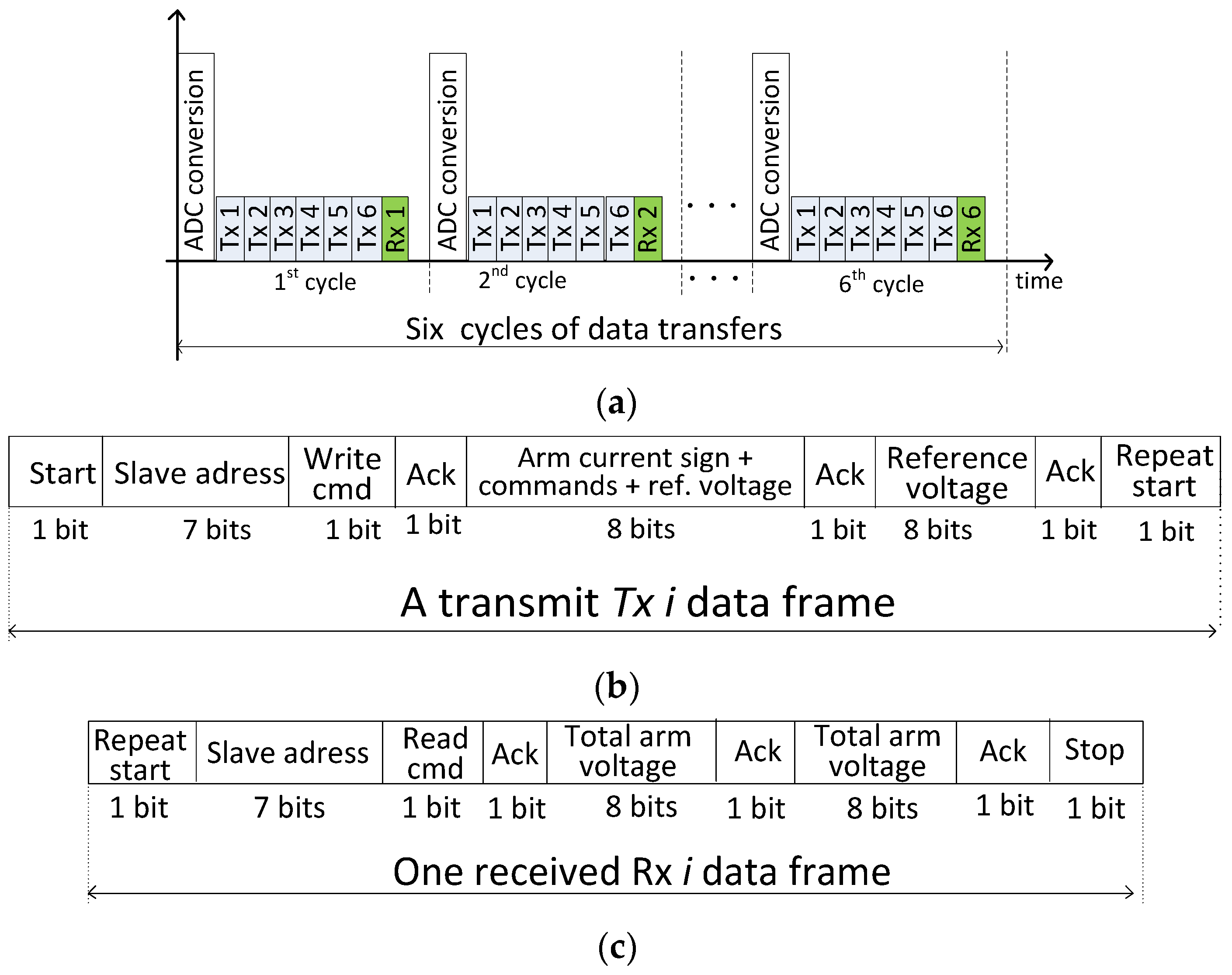
3.3.4. Communication and Synchronization with Slave Boards
3.4. Protection Functions
4. Experimental Validation
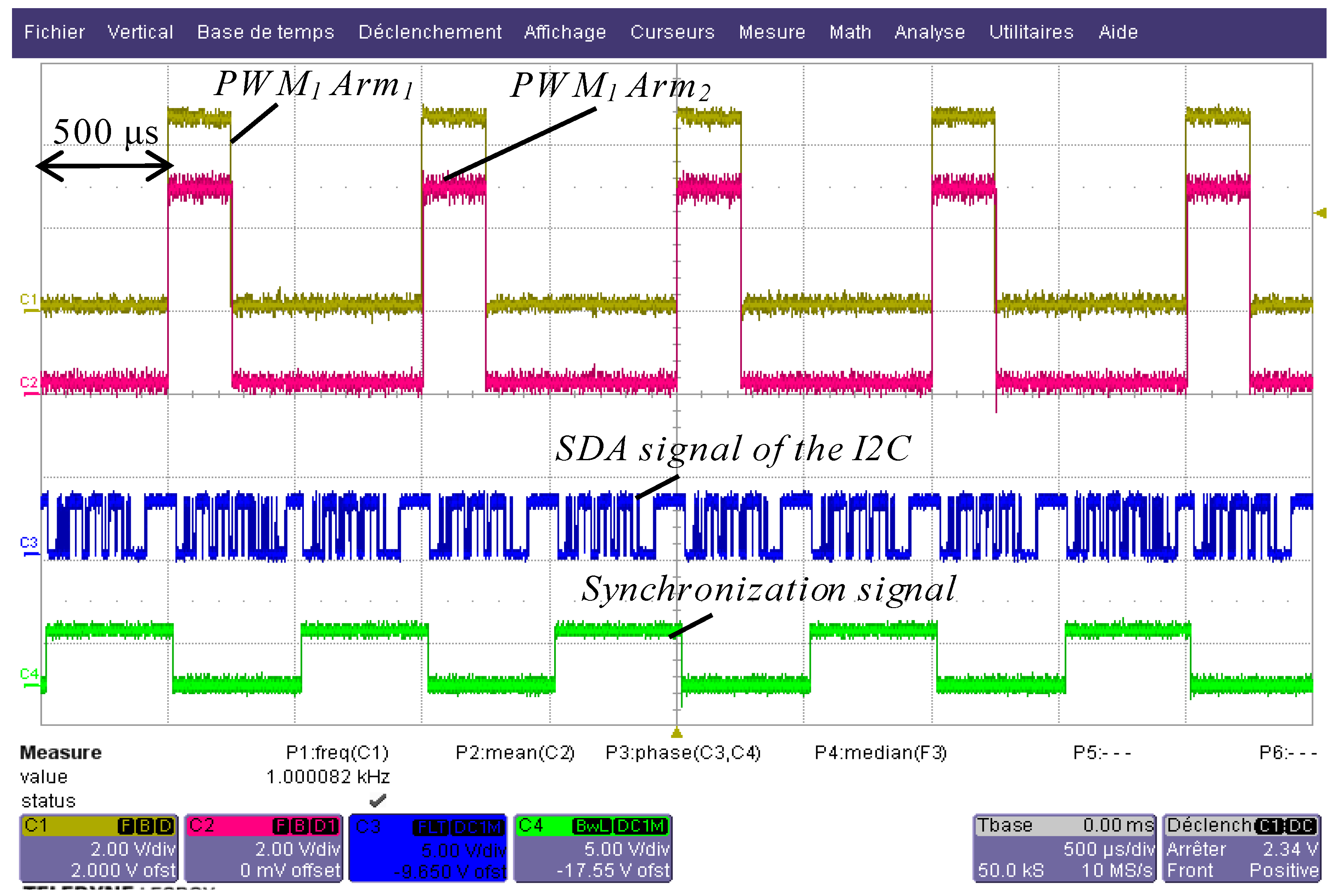
4.1. Communications Tests
4.2. MMC Control Tests
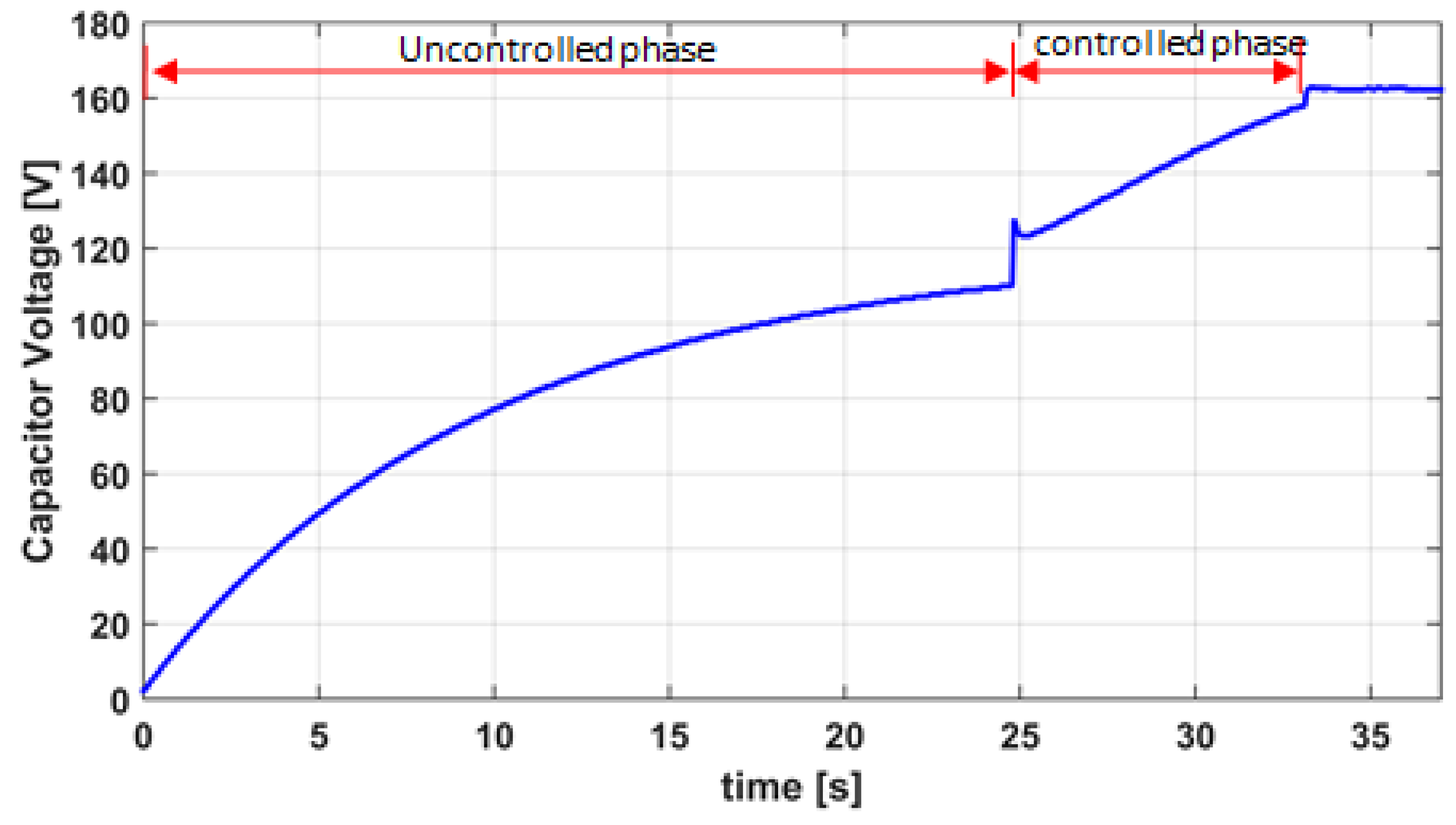
4.2.1. Pre-Charge Test
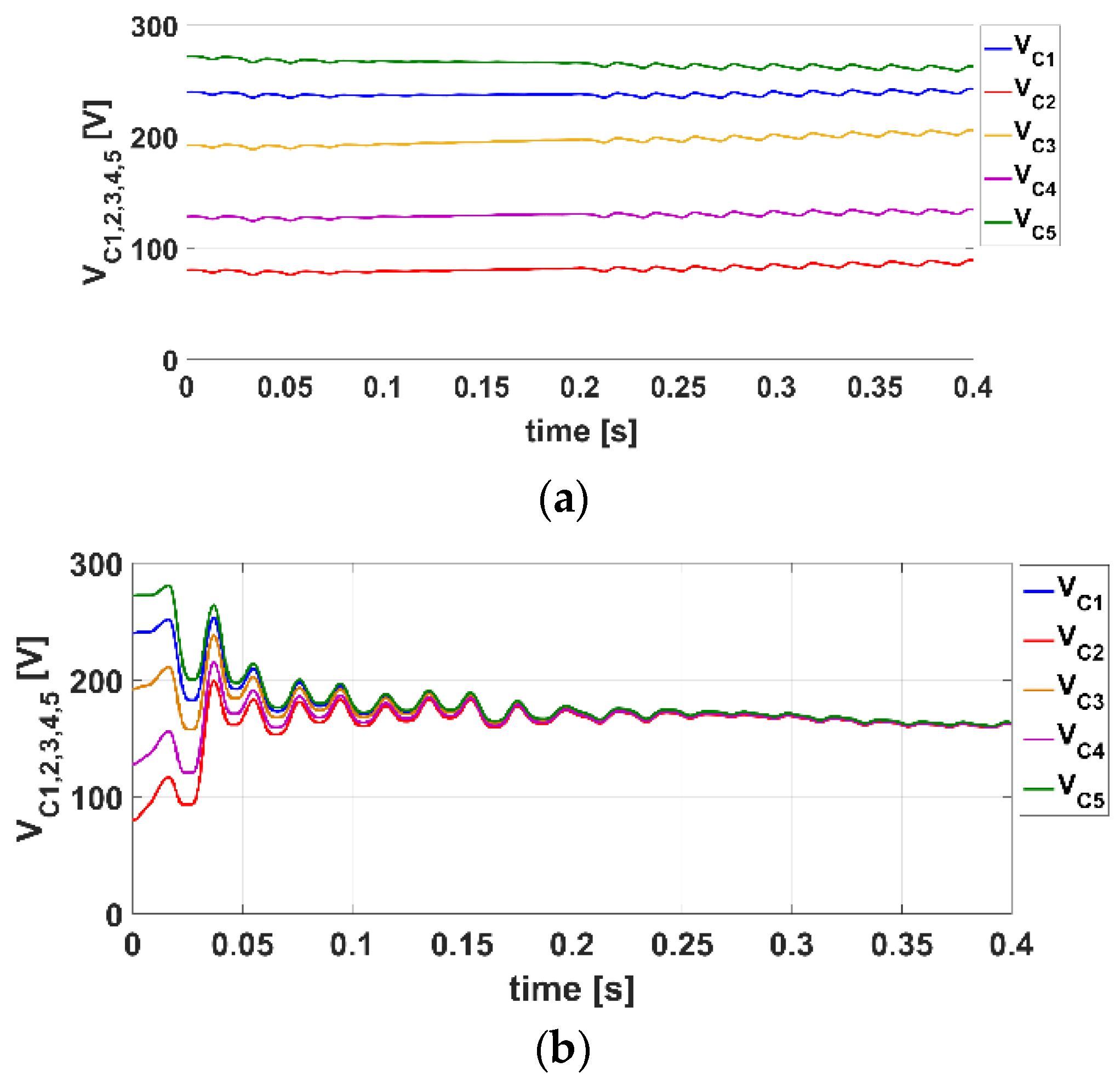
4.2.2. Capacitor Voltage Balancing Test
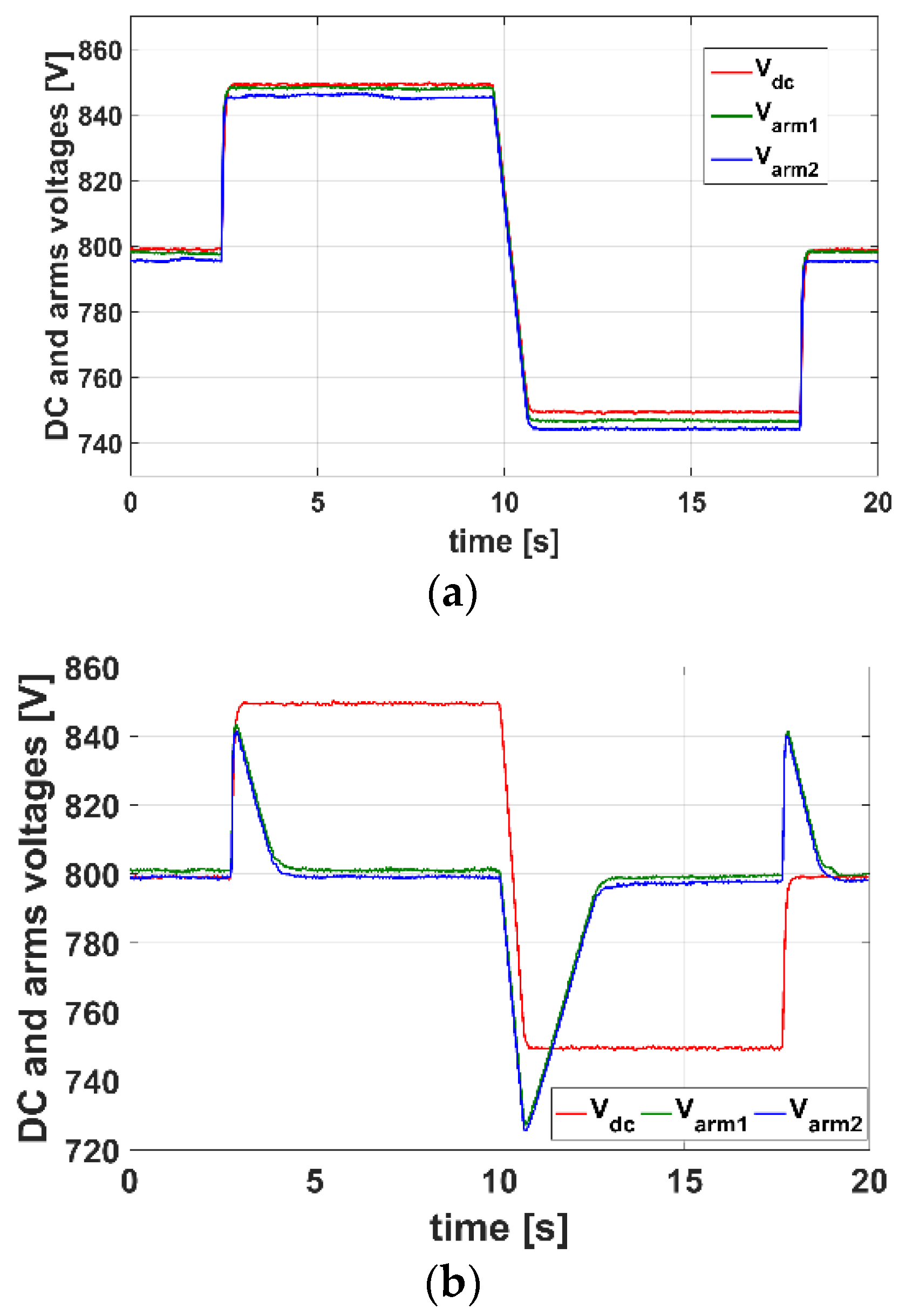
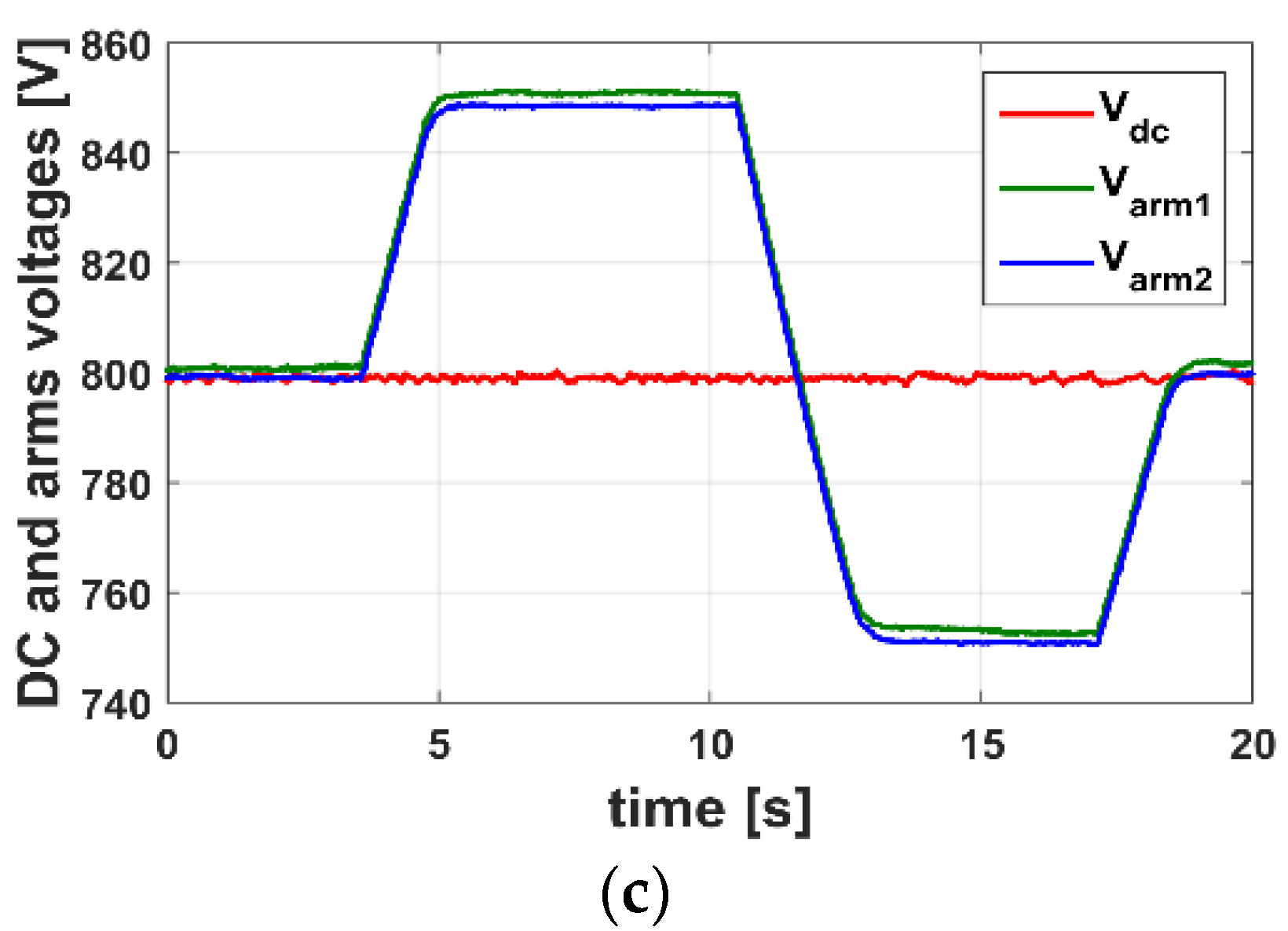
4.2.3. Output Current and Energy Stored Control Tests
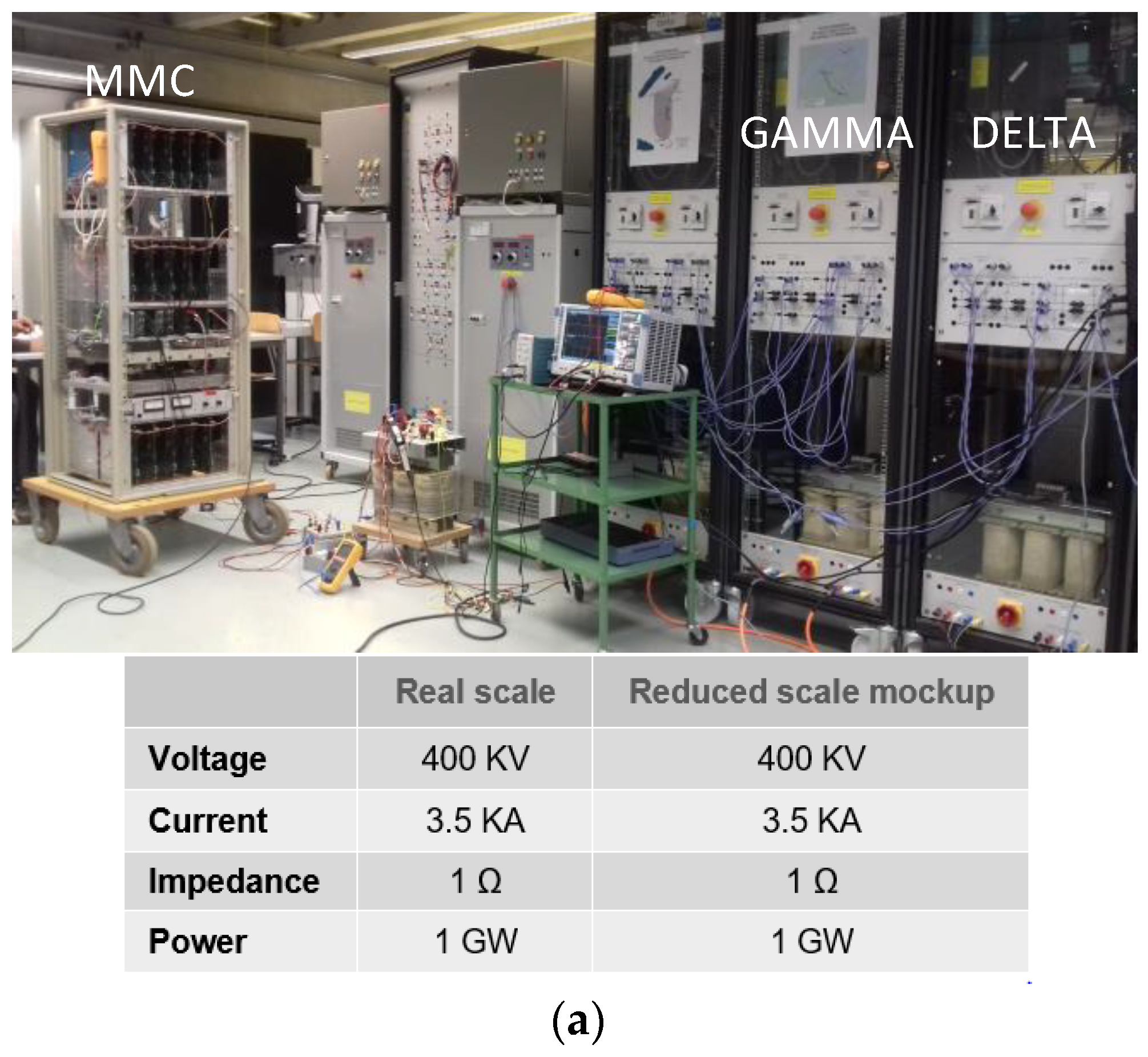
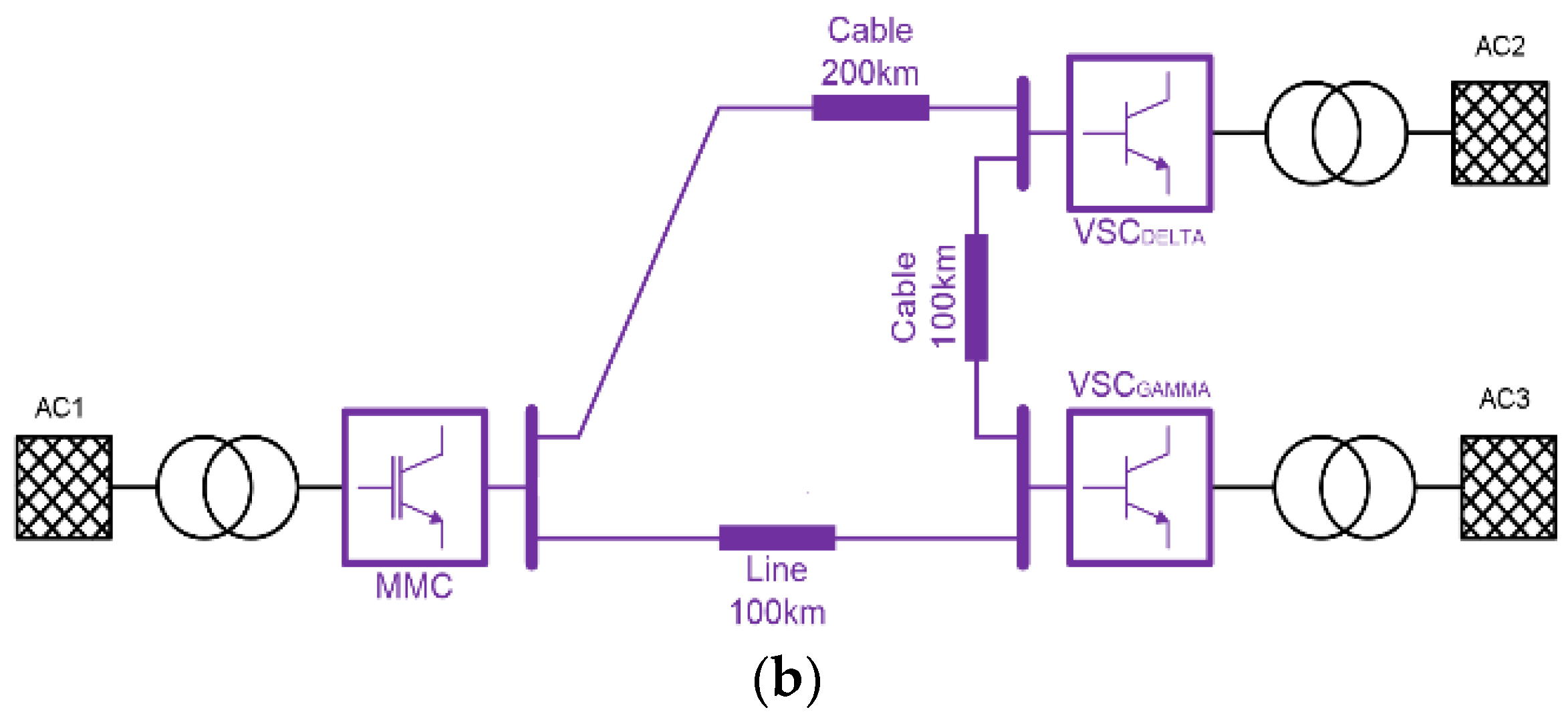
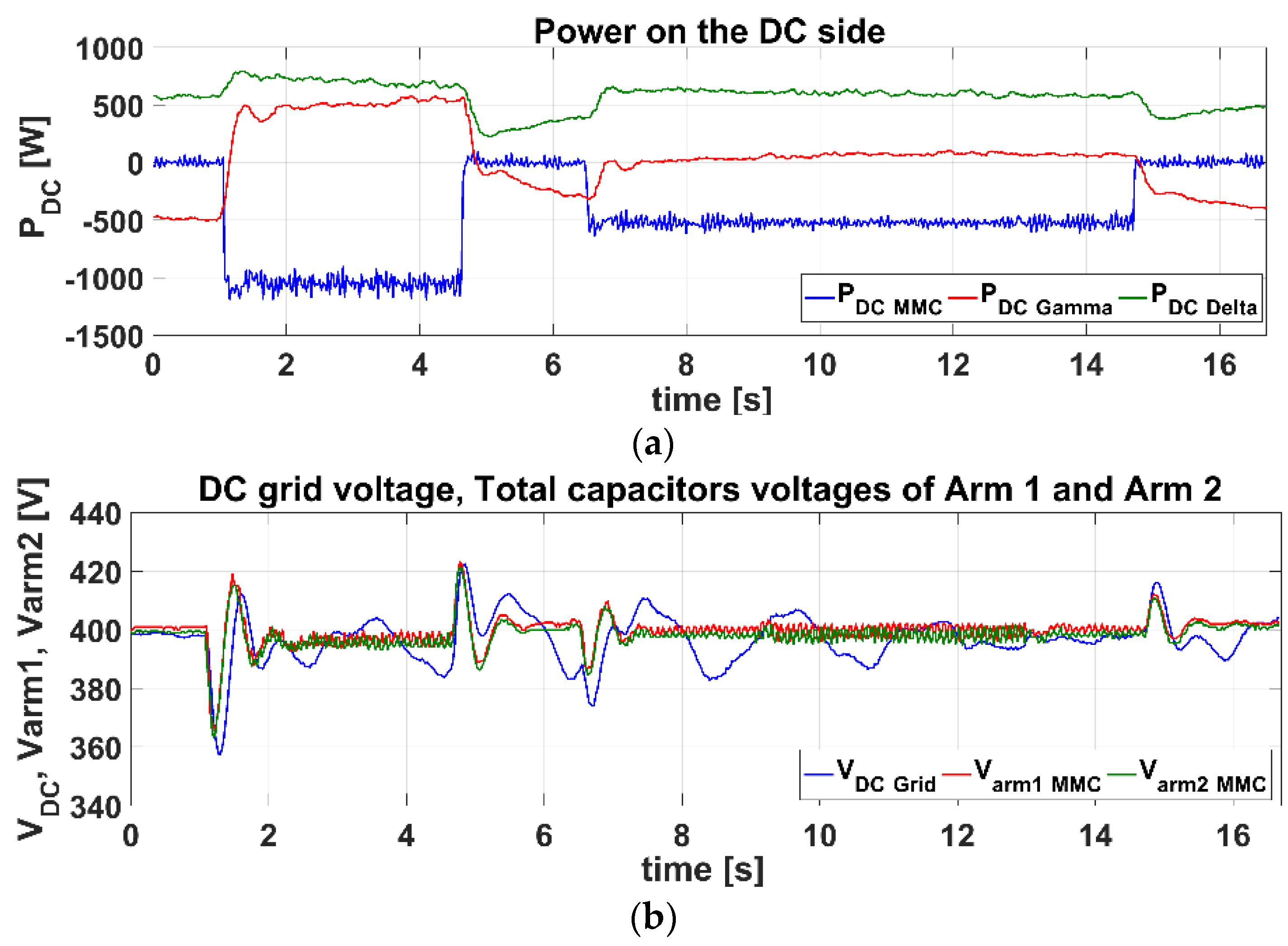
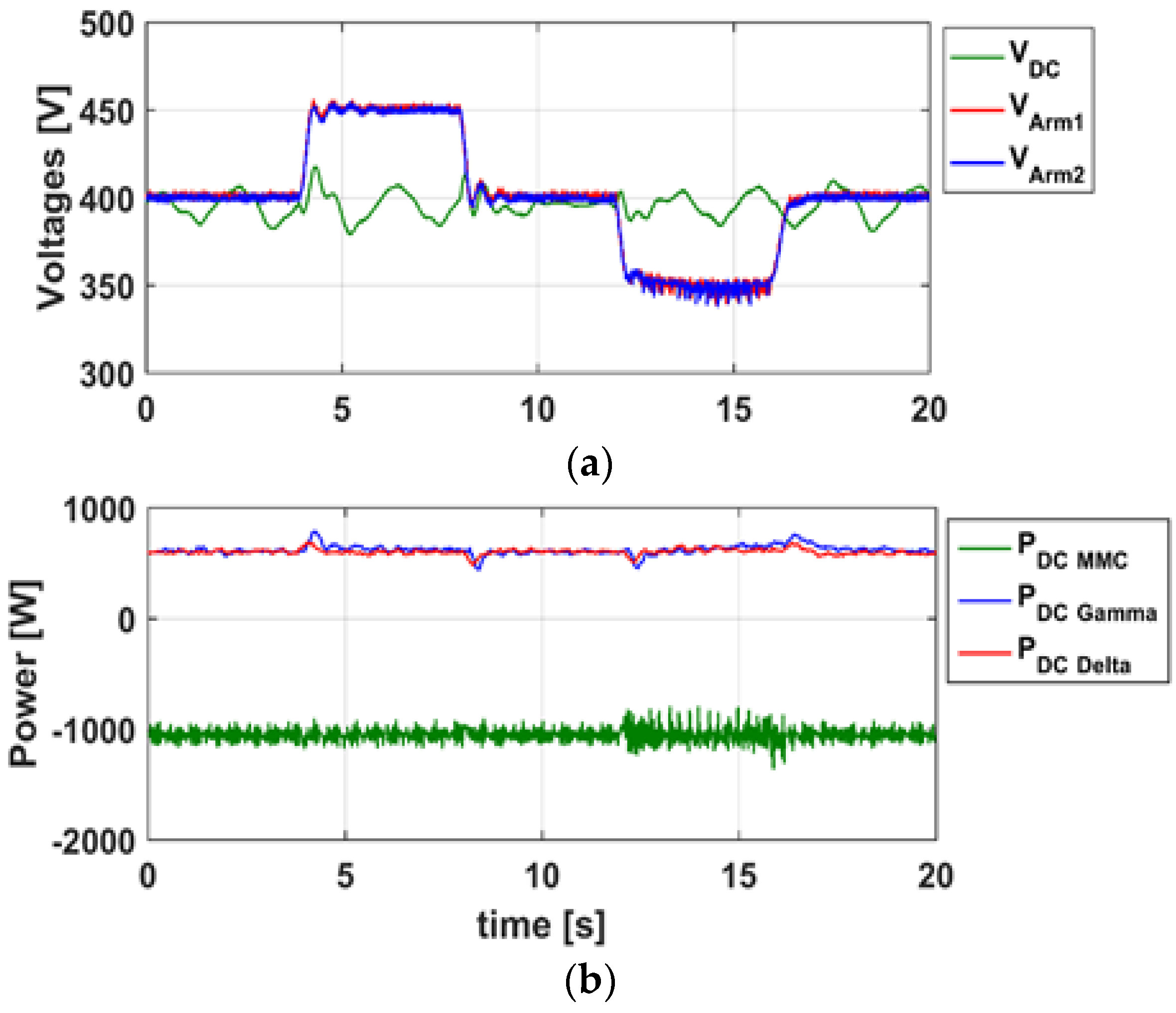
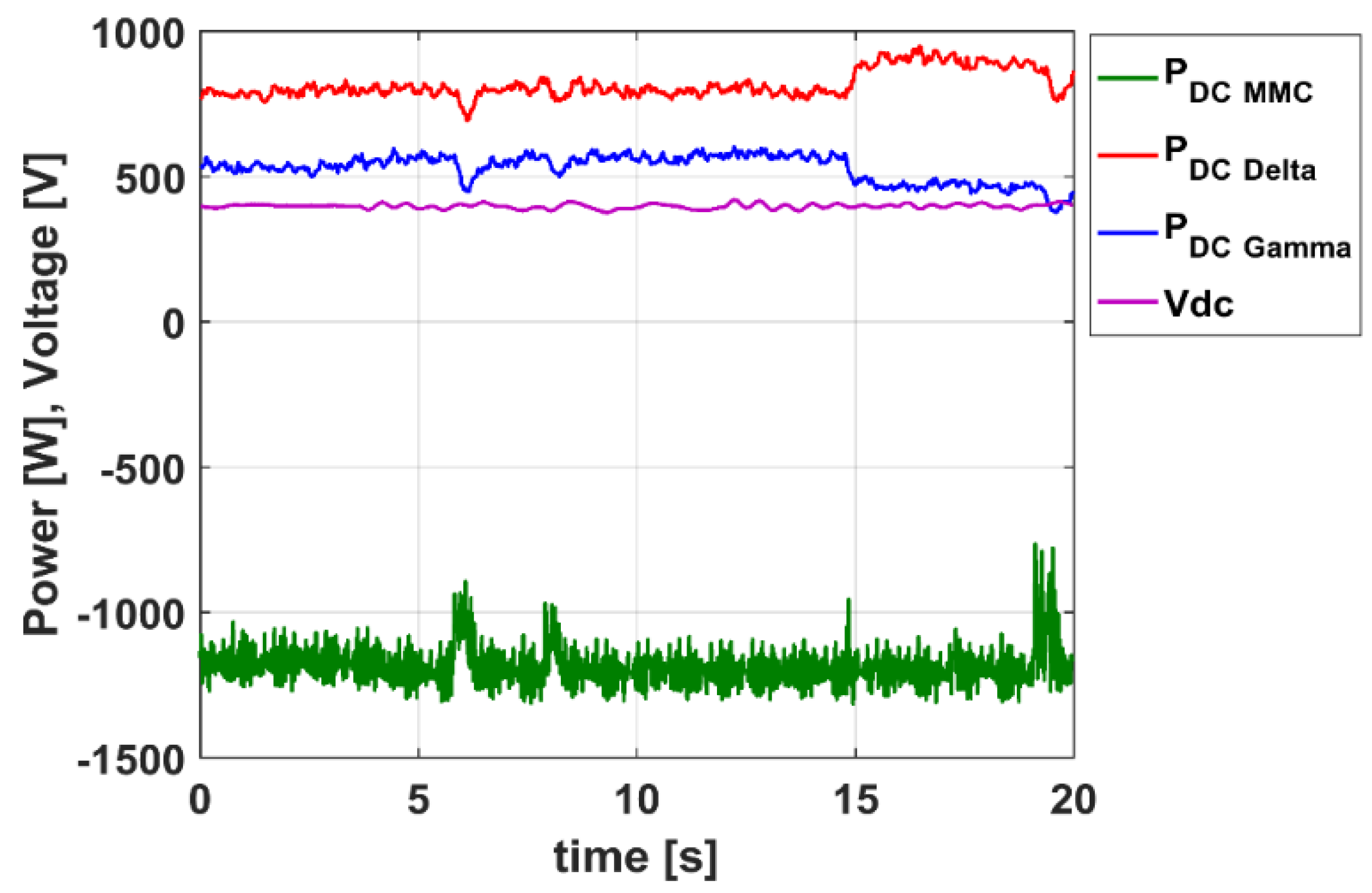
4.3. Power Flow Control in a MTDC Network
5. Discussion and Further Improvements
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Siemaszko, D.; Carpita, M.; Favre-Perrod, P. Conception of a modular multilevel converter in a multi-terminal DC/AC transmission network. In Proceedings of the Power Electronics and Applications (EPE’15 ECCE-Europe), Geneva, Switzerland, 8–10 September 2015. [Google Scholar] [CrossRef]
- Lesnicar, A.; Marquardt, R. An innovative modular multilevel converter topology suitable for a wide power range. In Proceedings of the IEEE Bologna Power Tech Conference, Bologna, Italy, 23–26 June 2003. [Google Scholar] [CrossRef]
- Sharifabadi, K.; Harnefors, L.; Nee, H.P.; Norrga, S.; Teodorescu, R. Design, Control, and Application of Modular Multilevel Converters for HVDC Transmission Systems; Wiley-IEEE Press: Hoboken, NJ, USA, 2016. [Google Scholar]
- Perez, M.A.; Bernet, S.; Rodriguez, J.; Kouro, S.; Lizana, R. Circuit topologies, modelling, control schemes and applications of modular multilevel converters. IEEE Trans. Power Electron. 2015, 30, 4–17. [Google Scholar] [CrossRef]
- Dorn, J.; Gambach, H.; Strauss, J.; Westerweller, T.; Alligan, J. Transbay cable-A breakthrough of VSC multilevel converters in HVDC transmission. In Proceedings of the CIGRE San Francisco Colloquium, San Francisco, CA, USA, 7–9 March 2012. [Google Scholar]
- Francos, P.L.; Verdugo, S.; Alvarez, H.F.; Guyomarch, S.; Loncle, J. INELFE—Europe’s first integrated onshore HVDC interconnection. In Proceedings of the IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012. [Google Scholar]
- Hussennether, V.; Rittiger, J.; Barth, A.; Worthington, D.; Rapetti, D.G.M.; Huhnerbein, B.; Siebert, M. Project borwin2 and helwin1-large scale multilevel voltage sources converter technology for bundling of offshore windpower. In Proceedings of the CIGRE, Paris, France, 26–31 August 2012. [Google Scholar]
- Zhang, L.; Zou, Y.; Yu, J.; Qin, J.; Vittal, V.; Karady, G.; Shi, D.; Wang, Z. Modeling, control, and protection of modular multilevel converter-based multi-terminal HVDC systems: A review. CSEE J. Power Energy Syst. 2017, 3, 340–352. [Google Scholar] [CrossRef]
- Ronanki, D.; Williamson, S. Modular Multilevel Converters for transportation electrification: Challenges and opportunities. IEEE Trans. Transport. Electrification 2018, 4, 399–407. [Google Scholar] [CrossRef]
- Van Hertem, D.; Ghandhari, M. Multi-terminal VSC HVDC for the European supergrid: Obstacles. Renew. Sustain. Energy Rev. 2010, 14, 3156–3163. [Google Scholar] [CrossRef]
- Bucher, M.K.; Franck, C.M. Fault current interruption in multiterminal HVDC networks. IEEE Trans. Power Deliv. 2015, 31, 87–95. [Google Scholar] [CrossRef]
- Li, R.; Xu, L.; Yao, L.; Williams, B.W. Active control of DC fault currents in DC solid-state transformers during ride-through operation of multi-terminal HVDC systems. IEEE Trans. Energy Convers. 2016, 31, 1336–1346. [Google Scholar] [CrossRef]
- Egea-Alvarez, A.; Bianchi, F.; Junyent-Ferre, A.; Gross, G.; Gomis-Bellmunt, O. Voltage control of multiterminal VSC-HVDC transmission systems for offshore wind power plants: Design and implementation in a scaled platform. IEEE Trans. Ind. Electron. 2013, 60, 2381–2391. [Google Scholar] [CrossRef]
- Aragüés-Peñalba, M.; Egea-Àlvarez, A.; Galceran Arellano, S.; Gomis-Bellmunt, O. Droop control for loss minimization in HVDC multi-terminal transmission systems for large offshore wind farms. Electr. Power Syst. Res. 2014, 112, 48–55. [Google Scholar] [CrossRef]
- Debnath, S.; Qin, J.; Bahrani, B.; Saeedifard, M.; Barbosa, P. Operation, control, and applications of the modular multilevel converter: A review. IEEE Trans. Power Electron. 2015, 30, 37–53. [Google Scholar] [CrossRef]
- Belhaouane, M.; Freytes, J.; Ayari, M.; Colas, F.; Gruson, F.; Braiek, N.; Guillaud, X. Optimal control design for Modular Multilevel Converters operating on multi-terminal DC Grid. In Proceedings of the 2016 Power Systems Computation Conference (PSCC), Genova, Italy, 20–24 June 2016; pp. 1–7. [Google Scholar] [CrossRef]
- Ji, H.; Chen, A.; Liu, Q.; Zhang, C. A new circulating current suppressing control strategy for modular multilevel converters. In Proceedings of the 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 9151–9156. [Google Scholar] [CrossRef]
- Zama, A.; Benchaib, A.; Bacha, S.; Frey, D.; Silvant, S. High dynamics control for MMC based on exact discrete-time model with experimental validation. IEEE Trans. Power Deliv. 2018, 33, 477–488. [Google Scholar] [CrossRef]
- Zhou, Y.; Jiang, D.; Hu, P.; Guo, J.; Liang, Y.; Lin, Z. A prototype of modular multilevel converters. IEEE Trans. Power Electron. 2014, 29, 3267–3278. [Google Scholar] [CrossRef]
- Binbin, L.; Dandan, X.; Dianguo, X.; Rongfeng, Y. Prototype design and experimental verification of modular multilevel converter based back-to-back system. In Proceedings of the International Symposium on Industrial Electronics, Istanbul, Turkey, 1–4 June 2014; pp. 626–630. [Google Scholar]
- Moranchel, M.; Sanchez, F.M.; Bueno, E.J.; Rodriguez, F.J.; Sanz, I. Six-level modular multilevel converter prototype with centralized hardware platform controller. In Proceedings of the IECON 2015, Yokohama, Japan, 9–12 November 2015; pp. 863–868. [Google Scholar]
- Jasim, O.F.; Moreno, F.J.; Trainer, D.R.; Feldman, R.; Farr, E.M.; Claree, J.C. Hybrid experimental setup for alternate arm converter and modular multilevel converter. In Proceedings of the 13th IET international conference on AC and DC Power Transmission, Manchester, UK, 14–16 February 2017; pp. 1–6. [Google Scholar]
- Islam, M.R.; Guo, Y.; Zhu, J. FPGA-based control of modular multilevel converters: Modeling and experimental evaluation. In Proceedings of the International Conference on Electrical & Electronic Engineering (ICEEE), Rajshahi, Bangladesh, 4–6 November 2015; pp. 89–92. [Google Scholar]
- Lago, J.; Sousa, G.J.M.; Heldwein, M.L. Digital control/modulation platform for a modular multilevel converter system. In Proceedings of the COBEP, Gramado, Brazil, 27–31 October 2013; pp. 271–277. [Google Scholar]
- Luginbühl, M.; Pidancier, T.; Favre-Perrod, P. Transmission d’énergie par réseaux à courant continu multiterminaux. Bull. AES/Electrosuisse 2014, 12, 70–74. [Google Scholar]
- Hagiwara, M.; Akagi, H. Control and experiment of pulse width modulated modular multilevel converters. IEEE Trans. Power Electron. 2009, 24, 1737–1746. [Google Scholar] [CrossRef]
- Siemaszko, D. Fast sorting method for balancing capacitor voltages in modular multilevel converters. IEEE Trans. Power Electron. 2015, 30, 463–470. [Google Scholar] [CrossRef]
- Ängquist, L.; Antonopoulos, A.; Siemaszko, D.; Ilves, K.; Vasiladiotis, M.; Nee, H.P. Open-loop control of modular multilevel converters using estimation of stored energy. IEEE Trans. Ind. Appl. 2011, 47, 2516–2524. [Google Scholar] [CrossRef]
- Edpuganti, A.; Rathore, A.K. Optimal pulsewidth modulation of medium-voltage modular multilevel converter. IEEE Trans. Ind. Appl. 2016, 52, 3435–3442. [Google Scholar] [CrossRef]
- Franquelo, L.G.; Rodriguez, J.; Leon, J.I.; Kouro, S.; Portillo, R.; Prats, M.M. The age of multilevel converters arrives. IEEE Trans. Ind. Electron. Mag. 2008, 2, 28–39. [Google Scholar] [CrossRef]
- Delarue, P.; Gruson, F.; Guillaud, X. Energetic macroscopic representation and inversion based control of a modular multilevel converter. In Proceedings of the 15th European Conference on Power Electronics and Applications (EPE’13 ECCE Europe), Lille, France, 3–5 September 2013; pp. 1–10. [Google Scholar]
- Siemaszko, D.; Talon Louokdom, E.; Parisod, H.; Braun, J.; Gavin, S.; Eggenschwiler, L.; Favre-Perrod, P.; Carpita, M. Implementation and experimental set-up of a Modular Multilevel Converter in a Multi Terminal DC/AC transmission network. In Proceedings of the 18th European Conference on Power Electronics and Applications (EPE’16 ECCE Europe), Karlsruhe, Germany, 5–9 September 2016; pp. 1–12. [Google Scholar]
- Luginbühl, M.; Lalou, M.J. Contrôle coordonné des convertisseurs de réseaux MTDC. Bull. AES/Electrosuisse 2013, 12, 36–39. [Google Scholar]
- Vrana, T.K.; Zeni, L.; Fosso, O.B. Active power control with undead-band voltage & frequency droop for HVDC converters in large meshed DC grids. In Proceedings of the EWEA Conference, Copenhagen, Denmark, 16–19 April 2012. [Google Scholar]
- Talon, E.L.; Gavin, S.; Siemaszko, D.; Biya-Motto, F.; Essimbi, B.Z.; Carpita, M. Design and implementation of a multi-dsp based digital control system architecture for modular multilevel converters. In Proceedings of the IEEE-PEMC, Varna, Bulgaria, 25–30 September 2016; pp. 1182–1187. [Google Scholar]
- Wen, H.; Xiao, W.; Lu, Z. Current-fed high-frequency AC distributed power system for medium–high-voltage gate driving applications. IEEE Trans. Ind. Electron. 2013, 60, 3736–3751. [Google Scholar] [CrossRef]
- Talon Louokdom, E.; Siemaszko, D.; Gavin, S.; Leu, D.; Favre-Perrod, P.; Carpita, M. Use of Modular Multilevel Converter in multi-terminal DC transmission network: Reduced scale set-up and experimental results. In Proceedings of the 19th European Conference on Power Electronics and Applications (EPE’17 ECCE Europe), Warsaw, Poland, 11–14 September 2017; pp. P.1–P.9. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Main Devices | References |
|---|---|
| CPLD | XILINX XC9536XL-10VQG44C |
| VCO | AD654JRZ |
| IGBT | IXBH16N170 |
| Optical transmitter | AVAGO HFBR-1522Z |
| Optical receiver | AVAGO HFBR-2522Z |
| IGBT gate driver | ST TD350E |
| Electrolytic capacitors | ESMH451VND102MB63T |
| Film Capacitor | MKP1848C63012JY5 |
| Symbol | Quantity | Value |
|---|---|---|
| Ugrid | RMS grid AC voltage | 230 V |
| Inom | RMS nominal current | 7 A |
| UDC | DC voltage | 800 V |
| L | Arm inductance | 6 mH |
| fs | Switching frequency | 1 kHz |
| fech | Sampling frequency | 2 kHz |
| fgrid | Grid frequency | 50 Hz |
| C | Submodule capacitor | 3.3 mF |
| Vc | Submodule nominal voltage | 160 V |
| N | Number of submodule per arm | 5 |
| Rload | AC passive load resistance | 100 Ω |
| Lload | AC load Inductance | 3 mH |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Talon Louokdom, E.; Gavin, S.; Siemaszko, D.; Biya-Motto, F.; Essimbi Zobo, B.; Marchesoni, M.; Carpita, M. Small-Scale Modular Multilevel Converter for Multi-Terminal DC Networks Applications: System Control Validation. Energies 2018, 11, 1690. https://doi.org/10.3390/en11071690
Talon Louokdom E, Gavin S, Siemaszko D, Biya-Motto F, Essimbi Zobo B, Marchesoni M, Carpita M. Small-Scale Modular Multilevel Converter for Multi-Terminal DC Networks Applications: System Control Validation. Energies. 2018; 11(7):1690. https://doi.org/10.3390/en11071690
Chicago/Turabian StyleTalon Louokdom, Elie, Serge Gavin, Daniel Siemaszko, Frédéric Biya-Motto, Bernard Essimbi Zobo, Mario Marchesoni, and Mauro Carpita. 2018. "Small-Scale Modular Multilevel Converter for Multi-Terminal DC Networks Applications: System Control Validation" Energies 11, no. 7: 1690. https://doi.org/10.3390/en11071690
APA StyleTalon Louokdom, E., Gavin, S., Siemaszko, D., Biya-Motto, F., Essimbi Zobo, B., Marchesoni, M., & Carpita, M. (2018). Small-Scale Modular Multilevel Converter for Multi-Terminal DC Networks Applications: System Control Validation. Energies, 11(7), 1690. https://doi.org/10.3390/en11071690