City Bus Powertrain Comparison: Driving Cycle Variation and Passenger Load Sensitivity Analysis




Abstract
:1. Introduction
2. Bus Powertrain Technology Comparisons: State-of-the-Art
3. Methods
- CNG
- Diesel
- Parallel hybrid electric (with diesel ICE)
- Series hybrid electric (with diesel ICE)
- FCH
- Battery electric
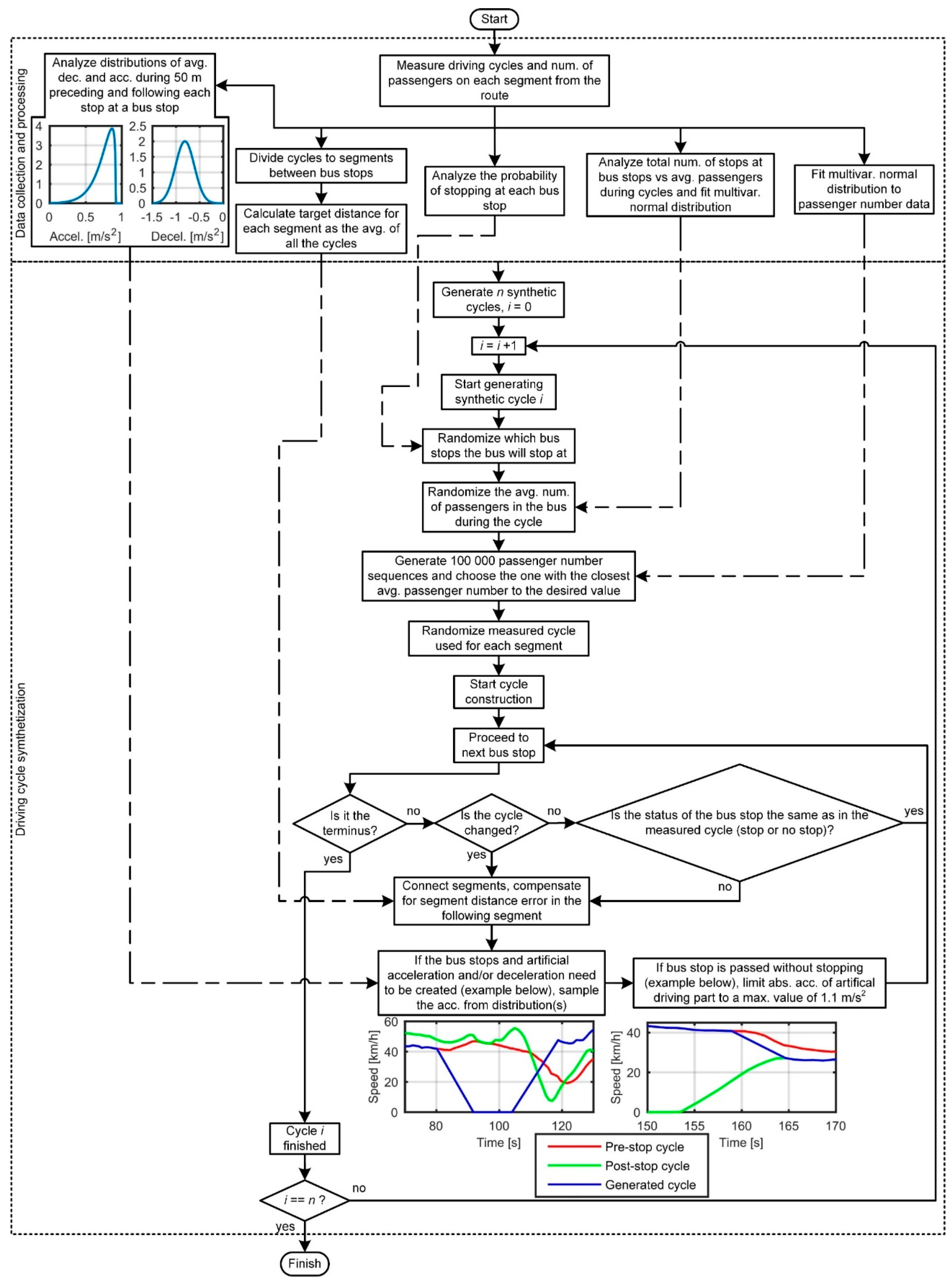
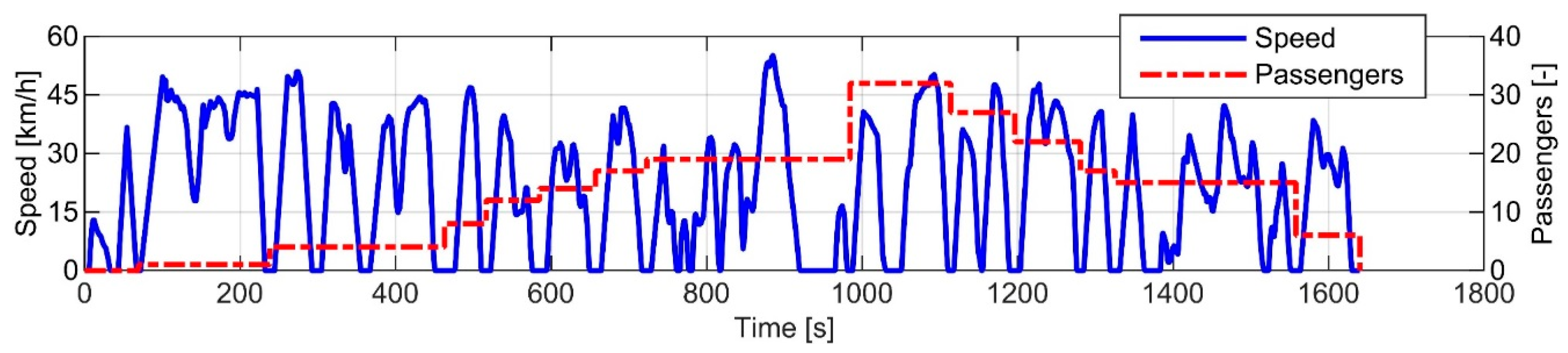
3.1. Driving Cycle Synthesis Using Monte Carlo Method
- Creep:
- Cruise:
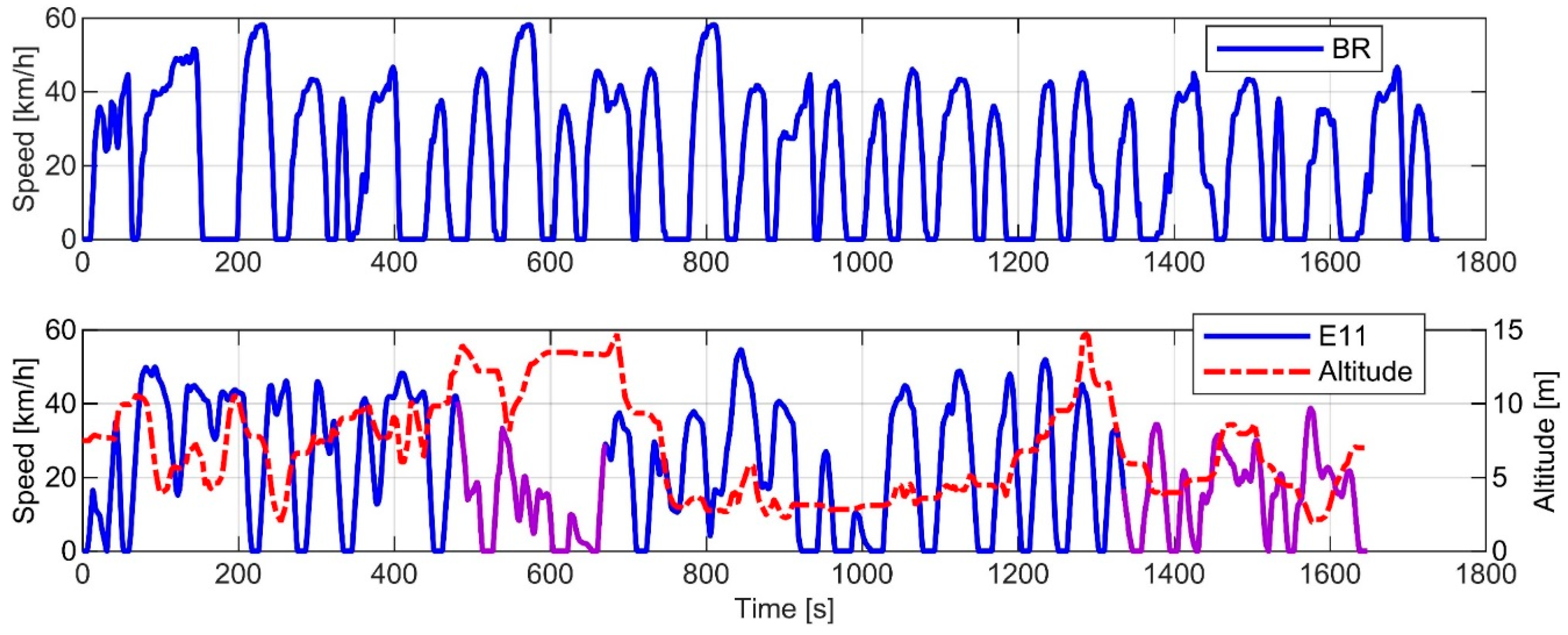
3.2. Reference Driving Cycles
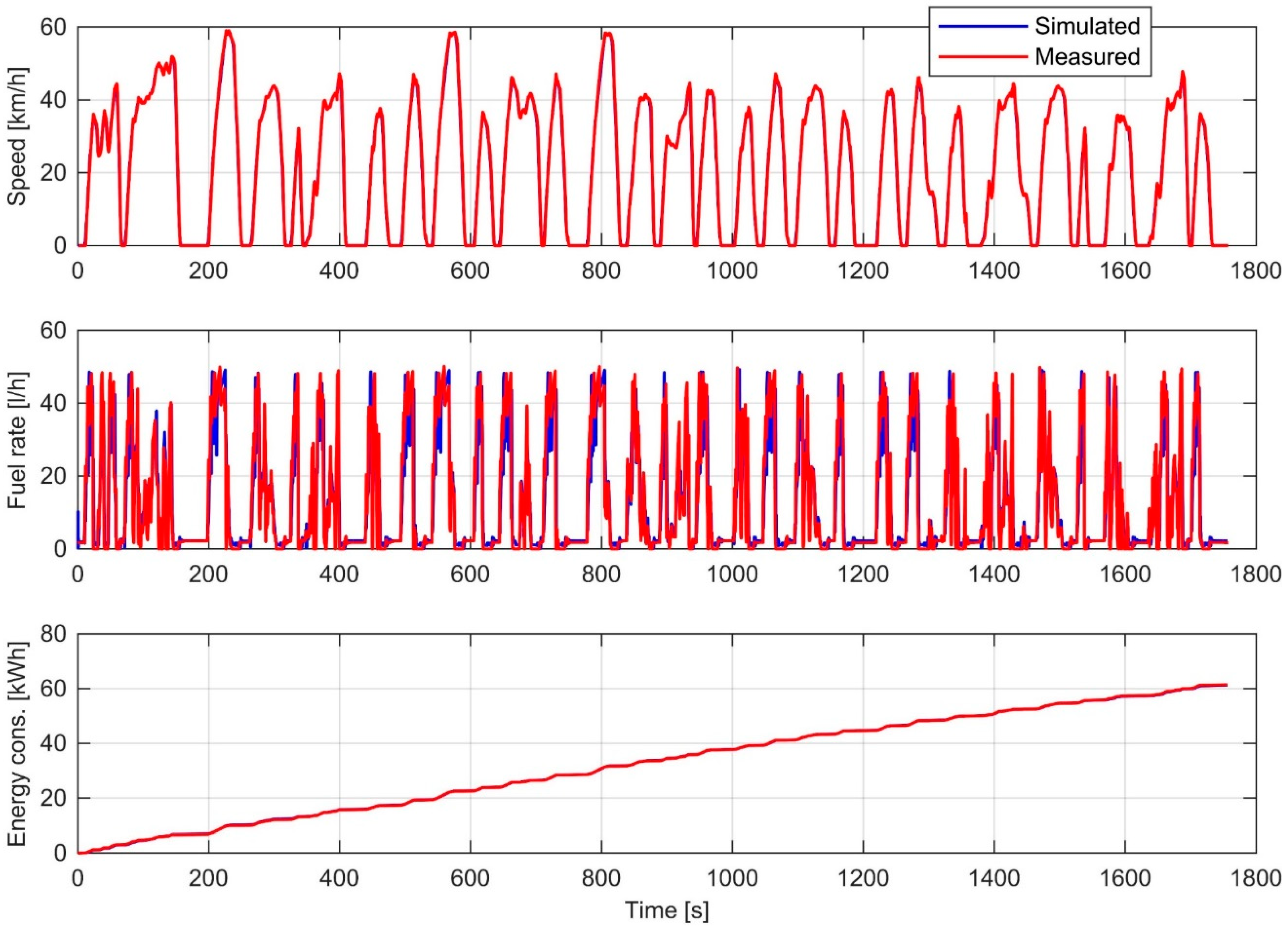
3.3. Simulation Models
4. Results and Discussion
4.1. Synthetic Suburban Cycle Simulations
4.2. Reference Cycle Simulations
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Driving Cycles




References
- Nylund, N.-O.; Koponen, P. Fuel and Technology Alternatives for Buses: Overall Energy Efficiency and Energy Performance; VTT: Espoo, Finland, 2012. [Google Scholar]
- Lajunen, A.; Lipman, T. Lifecycle cost assessment and carbon dioxide emissions of diesel, natural gas, hybrid electric, fuel cell hybrid and electric transit buses. Energy 2016, 106, 329–342. [Google Scholar] [CrossRef]
- Zhu, T.; Min, H.; Yu, Y.; Zhao, Z.; Xu, T.; Chen, Y.; Li, X.; Zhang, C. An Optimized Energy Management Strategy for Preheating Vehicle-Mounted Li-ion Batteries at Subzero Temperatures. Energies 2017, 10, 1–23. [Google Scholar] [CrossRef]
- Leou, R.C.; Hung, J.J. Optimal Charging Schedule Planning and Economic Analysis for Electric Bus Charging Stations. Energies 2017, 10. [Google Scholar] [CrossRef]
- Kim, J.; Song, I.; Choi, W. An Electric Bus with a Battery Exchange System. Energies 2015, 8, 6806–6819. [Google Scholar] [CrossRef] [Green Version]
- Cheng, S.; Xu, L.; Li, J.; Fang, C.; Hu, J.; Ouyang, M. Development of a PEM Fuel Cell City Bus with a Hierarchical Control System. Energies 2016, 9. [Google Scholar] [CrossRef]
- Eudy, L.; Post, M. Fuel Cell Buses in U.S. Transit Fleets: Current Status 2017; National Renewable Energy Laboratory: Golden, CO, USA, 2017.
- Wang, J. Barriers of scaling-up fuel cells: Cost, durability and reliability. Energy 2015, 80, 509–521. [Google Scholar] [CrossRef]
- Carignano, M.; Adorno, R.; van Dijk, N.; Nieberding, N.; Nigro, N.; Orbaiz, P. Assessment of Energy Management Strategies for a Hybrid Electric Bus. In Proceedings of the 5th International Conference on Engineering Optimization, Iguassu Falls, Brazil, 19–23 June 2016; pp. 19–23. [Google Scholar]
- Ehsani, M.; Yimin, G.; Miller, J.M. Hybrid Electric Vehicles: Architecture and Motor Drives. Proc. IEEE 2007, 95, 719–728. [Google Scholar] [CrossRef]
- García Sánchez, J.A.; López Martínez, J.M.; Lumbreras Martín, J.; Flores Holgado, M.N.; Aguilar Morales, H. Impact of Spanish electricity mix, over the period 2008–2030, on the Life Cycle energy consumption and GHG emissions of Electric, Hybrid Diesel-Electric, Fuel Cell Hybrid and Diesel Bus of the Madrid Transportation System. Energy Convers. Manag. 2013, 74, 332–343. [Google Scholar] [CrossRef]
- Ercan, T.; Zhao, Y.; Tatari, O.; Pazour, J.A. Optimization of transit bus fleet’s life cycle assessment impacts with alternative fuel options. Energy 2015, 93, 323–334. [Google Scholar] [CrossRef]
- Bottiglione, F.; Contursi, T.; Gentile, A.; Mantriota, G. The Fuel Economy of Hybrid Buses: The Role of Ancillaries in Real Urban Driving. Energies 2014, 7, 4202–4220. [Google Scholar] [CrossRef] [Green Version]
- Lajunen, A. Energy consumption and cost-benefit analysis of hybrid and electric city buses. Transp. Res. Part C Emerg. Technol. 2014, 38, 1–15. [Google Scholar] [CrossRef]
- Nesamani, K.S.; Subramanian, K.P. Development of a driving cycle for intra-city buses in Chennai, India. Atmos. Environ. 2011, 45, 5469–5476. [Google Scholar] [CrossRef]
- Lai, J.; Yu, L.; Song, G.; Guo, P.; Chen, X. Development of City-Specific Driving Cycles for Transit Buses Based on VSP Distributions: Case of Beijing. J. Transp. Eng. 2013, 139, 749–757. [Google Scholar] [CrossRef]
- Zhang, B.; Gao, X.; Xiong, X.; Wang, X.; Yang, H. Development of the driving cycle for Dalian city. In Proceedings of the 8th International Conference on Future Generation Communication and Networking, Haikou, China, 20–23 December 2014; pp. 60–63. [Google Scholar]
- Peng, M.; Liu, X.; Lin, Q. Construction of Engine Emission Test Driving Cycle of City Transit Buses. In SAE 2015 Commercial Vehicle Engineering Congress; SAE International: Rosemont, IL, USA, 2015. [Google Scholar]
- Ally, J.; Pryor, T. Life cycle costing of diesel, natural gas, hybrid and hydrogen fuel cell bus systems: An Australian case study. Energy Policy 2016, 94, 285–294. [Google Scholar] [CrossRef] [Green Version]
- Wang, R.; Wu, Y.; Ke, W.; Zhang, S.; Zhou, B.; Hao, J. Can propulsion and fuel diversity for the bus fleet achieve the win-win strategy of energy conservation and environmental protection? Appl. Energy 2015, 147, 92–103. [Google Scholar] [CrossRef]
- Xu, Y.; Gbologah, F.E.; Lee, D.Y.; Liu, H.; Rodgers, M.O.; Guensler, R.L. Assessment of alternative fuel and powertrain transit bus options using real-world operations data: Life-cycle fuel and emissions modeling. Appl. Energy 2015, 154, 143–159. [Google Scholar] [CrossRef]
- Correa, G.; Muñoz, P.; Falaguerra, T.; Rodriguez, C.R. Performance comparison of conventional, hybrid, hydrogen and electric urban buses using well to wheel analysis. Energy 2017, 141, 537–549. [Google Scholar] [CrossRef]
- Zhou, B.; Wu, Y.; Zhou, B.; Wang, R.; Ke, W.; Zhang, S.; Hao, J. Real-world performance of battery electric buses and their life-cycle benefits with respect to energy consumption and carbon dioxide emissions. Energy 2016, 96, 603–613. [Google Scholar] [CrossRef]
- Federal Transit Administration Bus Testing: Calculation of Average Passenger Weight and Test Vehicle Weight. Available online: https://www.federalregister.gov/documents/2012/12/14/2012-30184/bus-testing-calculation-of-average-passenger-weight-and-test-vehicle-weight (accessed on 14 February 2018).
- Hoberock, L.L. A survey of longitudinal acceleration comfort studies in ground transportation vehicles. J. Dyn. Syst. 1977, 99, 76–84. [Google Scholar] [CrossRef]
- Karekla, X.; Tyler, N. Reducing non-collision injuries aboard buses: Passenger balance whilst walking on the lower deck. Saf. Sci. 2018, 105, 128–133. [Google Scholar] [CrossRef]
- Halmeaho, T.; Rahkola, P.; Tammi, K.; Pippuri, J.; Pellikka, A.-P.; Manninen, A.; Ruotsalainen, S. Experimental validation of electric bus powertrain model under city driving cycles. IET Electr. Syst. Transp. 2016, 7, 74–83. [Google Scholar] [CrossRef]
- Kim, M.; Jung, D.; Min, K. Optimal torque distribution strategy for dual traction motors in a series hybrid electric intra-city bus. Int. J. Heavy Veh. Syst. 2017, 24, 18–44. [Google Scholar] [CrossRef]
- Amirjamshidi, G.; Roorda, M.J. Development of simulated driving cycles for light, medium, and heavy duty trucks: Case of the Toronto Waterfront Area. Transp. Res. Part D Transp. Environ. 2015, 34, 255–266. [Google Scholar] [CrossRef]
- Lajunen, A.; Kalttonen, A. Investigation of Thermal Energy Losses in the Powertrain of an Electric City Bus. In Proceedings of the 2015 IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 14–17 June 2015. [Google Scholar]
- Nylund, N.-O.; Erkkilä, K.; Westerholm, M. Raskaan Ajoneuvokaluston Energiankäytön Tehostaminen—Raportti 2004; VTT: Espoo, Finland, 2005. [Google Scholar]
- Liimatainen, H.; Metsäpuro, P.; Ikonen, M.; Wahlsten, R.; Lajunen, A. Hybridibussit—Kokemuksia Käyttöönotosta, Liikennöinnistä ja Energiankulutuksesta; Tampereen teknillinen yliopisto Liikenteen tutkimuskeskus Verne: Tampere, Finland, 2014. [Google Scholar]
- DieselNet Orange County Bus (OC BUS) Cycle. Available online: https://www.dieselnet.com/standards/cycles/ocbus.php (accessed on 8 May 2018).
- Argonne National Laboratory Autonomie. Available online: https://www.autonomie.net/expertise/Autonomie.html (accessed on 13 February 2018).
- Vijayagopal, R.; Rousseau, A. System Analysis Using Multiple Expert Tools. In SAE World Congress; SAE International: Detroit, MI, USA, 2011. [Google Scholar]
- Linkker Technology. Available online: http://www.linkkerbus.com/technology/ (accessed on 14 February 2018).
- Volvo Bus Corporation. Volvo 7900 Hybrid Specifikationer. Available online: http://www.volvobuses.se/sv-se/our-offering/buses/volvo-7900-hybrid/specifications.html (accessed on 8 May 2018).
- Volvo Bus Corporation. Volvo 7900 Electric Specifikationer. Available online: http://www.volvobuses.se/sv-se/our-offering/buses/volvo-7900-electric/specifications.html (accessed on 8 May 2018).
- Volvo Bus Corporation. Volvo 7900 Range—The Volvo 7900 Takes You Further. Available online: https://zahidtractor.com/sites/default/files/7900_range_brochure.pdf (accessed on 8 May 2018).
- New Flyer Industries. Xcelsior Specs Sheet. Available online: https://www.newflyer.com/site-content/uploads/2017/09/729-NFL-Xcelsior-Final.pdf (accessed on 8 May 2018).
- Eudy, L.; Post, M. Zero Emission Bay Area (ZEBA) Fuel Cell Bus Demonstration Results: Fourth Report Zero Emission Bay Area (ZEBA) Fuel Cell Bus Demonstration Results: Fourth Report; National Renewable Energy Laboratory: Denver, CO, USA, 2015.
- Xu, C.; Gertner, G.Z. Uncertainty and sensitivity analysis for models with correlated parameters. Reliab. Eng. Syst. Saf. 2008, 93, 1563–1573. [Google Scholar] [CrossRef]
- Daimler Mercedes-Benz Citaro G Hybrid: First Citaro Hybrid Buses Leave the Factory. Available online: http://media.daimler.com/marsMediaSite/en/instance/ko/Mercedes-Benz-Citaro-G-hybrid-First-Citaro-hybrid-buses-leave-the-factory.xhtml?oid=32414377 (accessed on 1 June 2018).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Ref. | Authors and Year | Geographic Context | Major Results |
|---|---|---|---|---|
| Lifecycle cost comparison | [2] | Lajunen and Lipman, 2016 | Generic, multiple driving cycles | Diesel hybrid buses are currently the most feasible alternative for conventional buses [2,19]. TCO of FCH buses is more than twice as high as that of diesel buses [2,19]. |
| [19] | Ally and Pryor, 2016 | Perth, Australia | ||
| Emissions and optimal fleet composition | [11] | García Sánchez et al., 2013 | Spain | Electricity production methods and local energy availability strongly influence optimal composition [11,20,21,22]. Viability of BEBs correlates with the amount of congestion in the region [12]. Heterogeneous compositions are better in regions with less energy-demanding driving [12]. Hybrid buses are a robust option for any environment [11,12,20,21,22]. |
| [12] | Ercan et al., 2015 | United States | ||
| [20] | Wang et al., 2015 | China | ||
| [21] | Xu et al., 2015 | United States | ||
| [22] | Correa et al., 2017 | Argentina | ||
| Energy consumption and emissions analysis | [13] | Bottiglione et al., 2014 | Taranto, Italy | Consumption of hybrids and BEBs is less dependent on the driving cycle compared to diesel and CNG buses [13,14]. Plug-in hybrid buses and BEBs have the highest potential to reduce energy use and emissions [14]. Energy consumption of BEBs and hybrids is more sensitive to auxiliary device power demand [13,23]. |
| [14] | Lajunen, 2014 | Generic, multiple driving cycles | ||
| [23] | Zhou et al., 2016 | Macao, China |
| Parameter | BR | E11 |
|---|---|---|
| Max. speed (km/h) | 58.2 | 54.8 |
| Average speed (km/h) | 22.5 | 21.8 |
| Average driving speed (km/h) | 29.5 | 26.2 |
| Distance (km) | 10.9 | 9.74 |
| Stops per km | 2.6 | 2.1 |
| Duration (s) | 1740 | 1637 |
| Total stop time (s) | 412 | 283 |
| Avg. stop duration (s) | 14.2 | 12.9 |
| Creep percentage | 1.7% | 1.8% |
| Cruise percentage | 12.8% | 15.2% |
| Idle percentage | 23.7% | 16.8% |
| Max. acceleration (m/s2) | 2.41 | 1.44 |
| Max. deceleration (m/s2) | 3.58 | 1.81 |
| Avg. acceleration (m/s2) | 0.54 | 0.46 |
| Avg. deceleration (m/s2) | 0.72 | 0.43 |
| Aggressiveness (m/s2) | 0.22 | 0.19 |
| Parameter | Mean | Standard Deviation | Maximum | Minimum |
|---|---|---|---|---|
| Max. speed (km/h) | 56.2 | 3.8 | 65.4 | 47.45 |
| Avg. speed (km/h) | 21.3 | 1.3 | 27.0 | 16.9 |
| Avg. drv. speed (km/h) | 25.7 | 1.1 | 30.7 | 21.6 |
| Stops per km | 2.12 | 0.34 | 3.39 | 0.82 |
| Avg. passengers | 6.42 | 2.38 | 14.57 | 0.29 |
| Cycle duration (s) | 1656 | 102 | 2075 | 1300 |
| Total stop time (s) | 290 | 60 | 541 | 115 |
| Avg. stop duration (s) | 13.4 | 2.1 | 23.0 | 8.3 |
| Creep percentage | 1.3% | 0.6% | 4.3% | 0.3% |
| Cruise percentage | 14.3% | 2.1% | 22.8% | 8.1% |
| Idle percentage | 17.4% | 2.8% | 28.3% | 8.8% |
| Max. acceleration (m/s2) | 1.48 | 0.11 | 1.75 | 1.11 |
| Max. deceleration (m/s2) | 1.91 | 0.25 | 2.76 | 1.37 |
| Avg. acceleration (m/s2) | 0.46 | 0.03 | 0.57 | 0.35 |
| Avg. deceleration (m/s2) | 0.41 | 0.03 | 0.51 | 0.30 |
| Aggressiveness (m/s2) | 0.19 | 0.01 | 0.23 | 0.15 |
| Parameter | B18 | B51 | E11B | H1 | H2 | H3 | H24 | H55 | H550 | H58 | L05 | L31 | MAN | NYC | OCC | R36 | RTE | TA25 | TU03 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Max. spd (km/h) | 54.2 | 59.0 | 58.4 | 71.7 | 52.5 | 71.7 | 50.2 | 49.4 | 74.9 | 86.9 | 55.4 | 59.8 | 40.5 | 49.3 | 65.4 | 53.4 | 32.5 | 56.3 | 46.0 |
| Avg. spd (km/h) | 16.6 | 13.6 | 23.8 | 25.4 | 19.6 | 41.2 | 17.3 | 18.2 | 30.5 | 25.4 | 18.8 | 22.3 | 10.9 | 5.9 | 19.8 | 14.3 | 7.2 | 20.4 | 18.2 |
| Avg. drv. spd (km/h) | 22.4 | 19.7 | 27.5 | 33.2 | 26.5 | 47.9 | 20.4 | 22.9 | 35.5 | 32.6 | 25.2 | 27.1 | 16.4 | 15.9 | 24.4 | 20.0 | 13.6 | 24.2 | 22.2 |
| Distance (km) | 42.4 | 16.1 | 10.2 | 7.5 | 8.2 | 10.3 | 7.3 | 16.7 | 28.7 | 30.7 | 11.3 | 12.4 | 3.3 | 0.98 | 10.5 | 4.3 | 2.6 | 9.4 | 8.9 |
| Stops per km | 3.3 | 4.2 | 1.7 | 2.0 | 3.1 | 0.8 | 3.4 | 2.0 | 1.3 | 2.6 | 1.9 | 1.9 | 5.7 | 10.2 | 2.9 | 5.4 | 10.5 | 3.0 | 3.8 |
| Duration (s) | 9177 | 4283 | 1548 | 1066 | 1501 | 902 | 1529 | 3305 | 3384 | 4354 | 2165 | 1997 | 1089 | 600 | 1909 | 1084 | 1289 | 1667 | 1756 |
| Total stop time (s) | 2354 | 1336 | 412 | 249 | 394 | 125 | 234 | 668 | 472 | 961 | 549 | 355 | 363 | 377 | 355 | 309 | 606 | 262 | 315 |
| Avg. stop dura. (s) | 16.8 | 19.4 | 11.4 | 15.6 | 15.2 | 13.9 | 9.0 | 19.6 | 12.4 | 12.0 | 23.9 | 14.2 | 18.2 | 34.3 | 11.5 | 12.9 | 21.6 | 9.0 | 9 |
| Creep % | 4.2 | 3.4 | 0.1 | 0.7 | 0.8 | 0.3 | 0.1 | 1.7 | 0.1 | 0.1 | 2.5 | 3.5 | 1.8 | 0.0 | 2.9 | 0.2 | 0.0 | 0.2 | 0.3 |
| Cruise % | 11.6 | 6.5 | 22.2 | 10.5 | 7.3 | 19.0 | 9.3 | 16.8 | 16.8 | 7.8 | 16.1 | 12.0 | 8.8 | 4.7 | 14.4 | 7.1 | 4.3 | 8.9 | 10.6 |
| Idle % | 26.6 | 32.4 | 13.3 | 24.2 | 26.8 | 13.9 | 15.9 | 20.4 | 14.1 | 22.4 | 26.1 | 18.6 | 34.3 | 65.3 | 19.6 | 28.5 | 56.9 | 16.3 | 18.5 |
| Max. acc. (m/s2) | 1.87 | 1.93 | 1.60 | 1.50 | 1.50 | 1.42 | 2.83 | 0.99 | 2.03 | 1.93 | 1.52 | 1.81 | 2.0 | 2.76 | 1.81 | 1.87 | 1.69 | 2.84 | 4.10 |
| Max. dec. (m/s2) | 2.21 | 1.98 | 1.90 | 2.33 | 2.33 | 1.94 | 3.82 | 1.53 | 2.86 | 3.14 | 1.70 | 2.14 | 2.49 | 2.04 | 2.29 | 2.10 | 2.26 | 4.44 | 3.95 |
| Avg. acc. (m/s2) | 0.45 | 0.57 | 0.38 | 0.60 | 0.63 | 0.54 | 0.68 | 0.37 | 0.50 | 0.64 | 0.42 | 0.56 | 0.54 | 1.16 | 0.45 | 0.57 | 0.76 | 0.71 | 0.65 |
| Avg. dec. (m/s2) | 0.51 | 0.60 | 0.39 | 0.60 | 0.62 | 0.56 | 0.73 | 0.33 | 0.50 | 0.78 | 0.39 | 0.46 | 0.70 | 0.67 | 0.66 | 0.55 | 1.07 | 0.77 | 0.68 |
| Aggr. (m/s2) | 0.20 | 0.26 | 0.14 | 0.22 | 0.26 | 0.19 | 0.30 | 0.15 | 0.20 | 0.24 | 0.17 | 0.21 | 0.28 | 0.38 | 0.22 | 0.24 | 0.33 | 0.30 | 0.27 |
| Parameter | Diesel | CNG | Par. Hybrid | Ser. Hybrid | Electric | FCH |
|---|---|---|---|---|---|---|
| Curb weight (kg) | 10,500 | 11,630 | 10,500 | 11,630 | 10,500 | 12,130 |
| ICE peak power (kW) | 235 | 205 | 160 | 160 | - | - |
| EM peak power (kW) | - | - | 167 | 180/270 (regen.) | 180/270 (regen.) | 180/270 (regen.) |
| Fuel cell power (kW) | - | - | - | - | - | 160 |
| Battery capacity (kWh) | - | - | 7.7 | 11.6 | 55.2 | 11.6 |
| Battery nom. voltage (V) | - | - | 648 | 648 | 690 | 648 |
| Batt. cell config. (series × parallel) | - | - | 180 × 2 | 180 × 3 | 300 × 4 | 180 × 3 |
| Transmission | 6-speed automatic | 6-speed automatic | 12-speed automatic | Fixed gear ratio | Fixed gear ratio | Fixed gear ratio |
| Aux. power (kW) | 4 (mech.) 1 (elec.) | 4 (mech.) 1 (elec.) | 1 (mech.) 4 (elec.) | 1 (mech.) 4 (elec.) | 4 (elec.) | 4 (elec.) |
| Parameter | Value |
|---|---|
| Vehicle frontal area (m2) | 7.24 |
| Drag coefficient | 0.79 |
| Rolling resistance first coefficient | 0.008 |
| Rolling resistance second coefficient [1/(m/s)] | 0.00012 |
| Wheelbase (m) | 6.85 |
| Front weight fraction | 0.4 |
| Center of gravity, height (m) | 0.77 |
| Partial Regeneration | Full Regeneration | |
|---|---|---|
| Speed (km/h) | ≥ 5.4 | ≥ 10.8 |
| Acceleration (m/s2) | 0 > ≥ −4 | 0 > ≥ −2.5 |
| Bus Type | Mean (kWh/km) | Std. Dev. (kWh/km) | CV (-) | Max. (kWh/km) | Min. (kWh/km) |
|---|---|---|---|---|---|
| CNG | 4.103 | 0.197 | 0.048 | 4.744 | 3.340 |
| Diesel | 3.592 | 0.162 | 0.045 | 4.078 | 2.995 |
| Parallel hybrid | 2.517 | 0.081 | 0.032 | 2.776 | 2.199 |
| Series hybrid | 2.394 | 0.080 | 0.033 | 2.625 | 2.120 |
| FCH | 1.849 | 0.069 | 0.038 | 2.067 | 1.591 |
| Electric | 0.804 | 0.025 | 0.031 | 0.881 | 0.714 |
| Bus Type | Mean | Std. Dev. | CV (-) | Max. | Min. |
|---|---|---|---|---|---|
| Series hybrid | 61.91% | 1.23% | 0.020 | 65.87% | 56.60% |
| FCH | 61.71% | 1.23% | 0.020 | 65.71% | 56.42% |
| Electric | 63.66% | 1.30% | 0.021 | 67.92% | 57.93% |
| Parameter | CNG | Diesel | Par | Ser | FCH | Elec |
|---|---|---|---|---|---|---|
| Aggressiveness | 0.789 | 0.857 | 0.772 | 0.810 | 0.806 | 0.791 |
| Stops per km | 0.827 | 0.779 | 0.812 | 0.755 | 0.797 | 0.799 |
| Avg. speed | −0.828 | −0.727 | −0.803 | −0.678 | −0.778 | −0.757 |
| Cruise % | −0.697 | −0.721 | −0.672 | −0.669 | −0.701 | −0.694 |
| Total stop time | 0.733 | 0.654 | 0.644 | 0.626 | 0.712 | 0.701 |
| Avg. acc. | 0.636 | 0.705 | 0.636 | 0.701 | 0.682 | 0.669 |
| Avg. dec. | 0.655 | 0.723 | 0.612 | 0.685 | 0.638 | 0.667 |
| Avg. driving speed | −0.707 | −0.601 | −0.746 | −0.576 | −0.652 | −0.630 |
| Idle % | 0.623 | 0.560 | 0.522 | 0.553 | 0.628 | 0.621 |
| Avg. passengers | 0.504 | 0.538 | 0.557 | 0.569 | 0.532 | 0.584 |
| Creep % | 0.218 | 0.195 | 0.247 | 0.181 | 0.240 | 0.222 |
| Max. dec. | 0.147 | 0.169 | 0.169 | 0.170 | 0.163 | 0.161 |
| Max. speed | 0.114 | 0.126 | 0.136 | 0.159 | 0.182 | 0.166 |
| Avg. stop duration | 0.163 | 0.104 | 0.061 | 0.090 | 0.165 | 0.147 |
| Max. acc. | 0.094 | 0.085 | 0.116 | 0.124 | 0.099 | 0.115 |
| Bus type | Mean (kWh/km) | Std. Dev. (kWh/km) | CV (-) | Max. (kWh/km) | Min. (kWh/km) |
|---|---|---|---|---|---|
| CNG | 4.932 | 1.267 | 0.257 | 8.993 | 3.516 |
| Diesel | 4.199 | 0.913 | 0.218 | 7.018 | 3.041 |
| Parallel hybrid | 2.967 | 0.573 | 0.193 | 4.689 | 2.291 |
| Series hybrid | 2.802 | 0.420 | 0.150 | 4.098 | 2.193 |
| FCH | 2.240 | 0.367 | 0.164 | 3.349 | 1.707 |
| Electric | 0.929 | 0.131 | 0.141 | 1.355 | 0.742 |
| Parameter | CNG | Diesel | Parallel | Series | FCH | Electric |
|---|---|---|---|---|---|---|
| Stops per km | 0.970 | 0.954 | 0.933 | 0.879 | 0.932 | 0.889 |
| Aggressiveness | 0.830 | 0.876 | 0.900 | 0.916 | 0.871 | 0.845 |
| Cruise % | −0.818 | −0.834 | −0.837 | −0.809 | −0.836 | −0.759 |
| Avg. dec. | 0.718 | 0.769 | 0.811 | 0.880 | 0.782 | 0.820 |
| Idle % | 0.842 | 0.808 | 0.753 | 0.706 | 0.821 | 0.775 |
| Avg. acc. | 0.629 | 0.686 | 0.666 | 0.765 | 0.654 | 0.676 |
| Avg. speed | −0.771 | −0.746 | −0.702 | −0.548 | −0.676 | −0.519 |
| Avg. drv. speed | −0.789 | −0.770 | −0.575 | −0.455 | −0.578 | −0.408 |
| Max. speed | −0.677 | −0.645 | −0.621 | −0.478 | −0.549 | −0.450 |
| Creep % | −0.258 | −0.294 | −0.337 | −0.425 | −0.329 | −0.410 |
| Avg. stop duration | 0.352 | 0.293 | 0.237 | 0.177 | 0.333 | 0.297 |
| Max. acc. | 0.174 | 0.238 | 0.289 | 0.289 | 0.188 | 0.156 |
| Max. dec. | 0.118 | 0.198 | 0.242 | 0.312 | 0.164 | 0.176 |
| Total stop time | 0.132 | 0.124 | 0.067 | 0.034 | 0.131 | 0.077 |
| Powertrain | Pros | Cons |
|---|---|---|
| CNG | +Energy consumption influenced less by the aggressiveness compared to the diesel bus | −Highest consumption and statistical dispersion of consumption |
| Diesel | +Lower consumption and consumption dispersion than with the CNG powertrain | −More affected by the aggressiveness of the driving than the CNG powertrain |
| Parallel hybrid | +Can yield lower consumption dispersion than series hybrid on suitable routes | −High consumption on unsuited routes with too high aggressiveness and stop frequency |
| Series hybrid | +Suitable for any kind of route, consistent performance | −Can have higher consumption dispersion than parallel hybrid on suburban routes |
| FCH | +Lowest energy consumption of the hybrid powertrains | −Higher statistical dispersion of consumption compared to series hybrid |
| Battery electric | +Lowest energy consumption and consumption dispersion | −Limited range |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kivekäs, K.; Lajunen, A.; Vepsäläinen, J.; Tammi, K. City Bus Powertrain Comparison: Driving Cycle Variation and Passenger Load Sensitivity Analysis. Energies 2018, 11, 1755. https://doi.org/10.3390/en11071755
Kivekäs K, Lajunen A, Vepsäläinen J, Tammi K. City Bus Powertrain Comparison: Driving Cycle Variation and Passenger Load Sensitivity Analysis. Energies. 2018; 11(7):1755. https://doi.org/10.3390/en11071755
Chicago/Turabian StyleKivekäs, Klaus, Antti Lajunen, Jari Vepsäläinen, and Kari Tammi. 2018. "City Bus Powertrain Comparison: Driving Cycle Variation and Passenger Load Sensitivity Analysis" Energies 11, no. 7: 1755. https://doi.org/10.3390/en11071755
APA StyleKivekäs, K., Lajunen, A., Vepsäläinen, J., & Tammi, K. (2018). City Bus Powertrain Comparison: Driving Cycle Variation and Passenger Load Sensitivity Analysis. Energies, 11(7), 1755. https://doi.org/10.3390/en11071755