Hybrid Modulated Model Predictive Control in a Modular Multilevel Converter for Multi-Terminal Direct Current Systems



Abstract
:1. Introduction
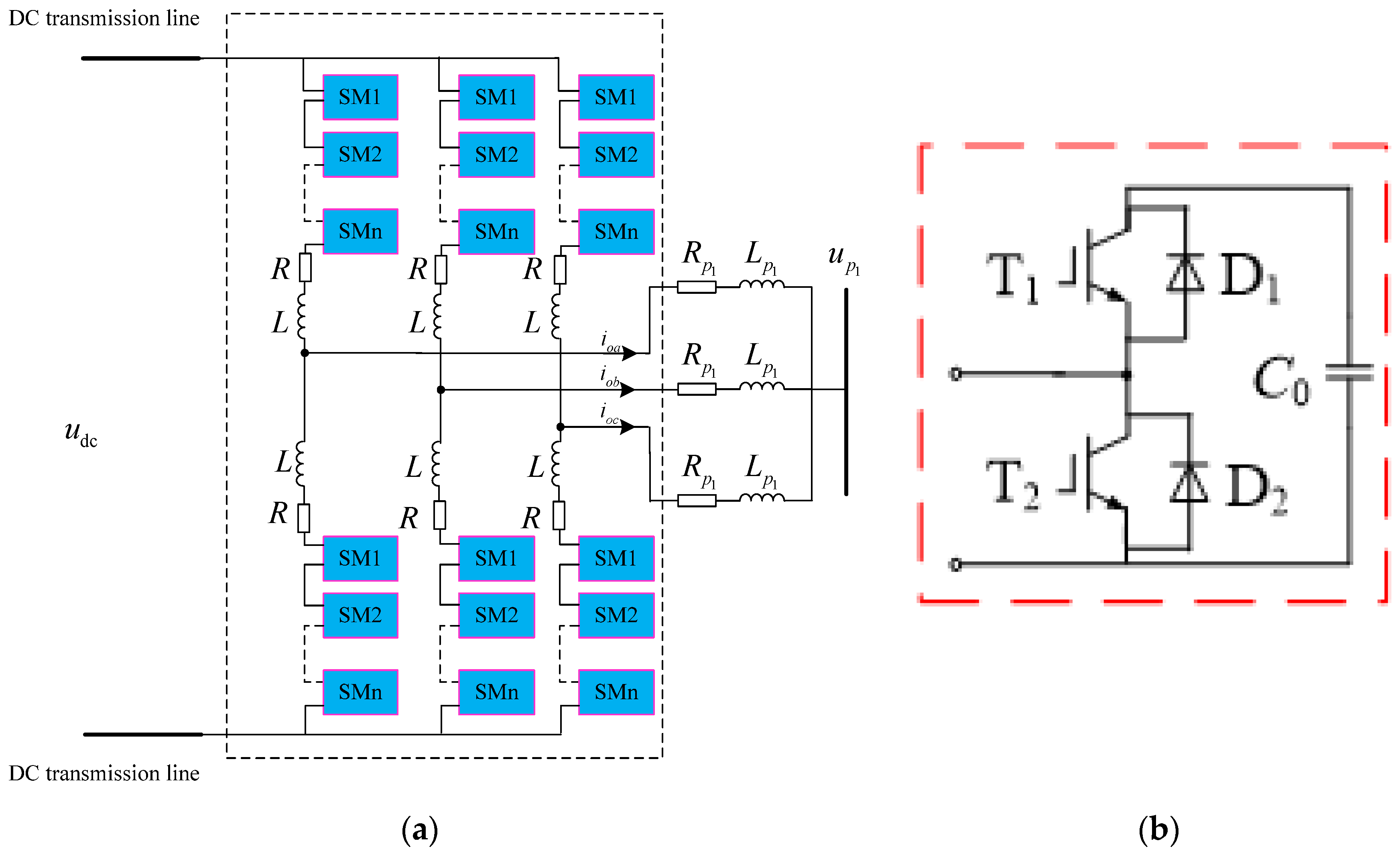
2. MMC-MTDC Mathematical Model
3. Design of the Hybrid Modulated Model Predictive Control Strategy
3.1. Design of the Inverter Side Controller
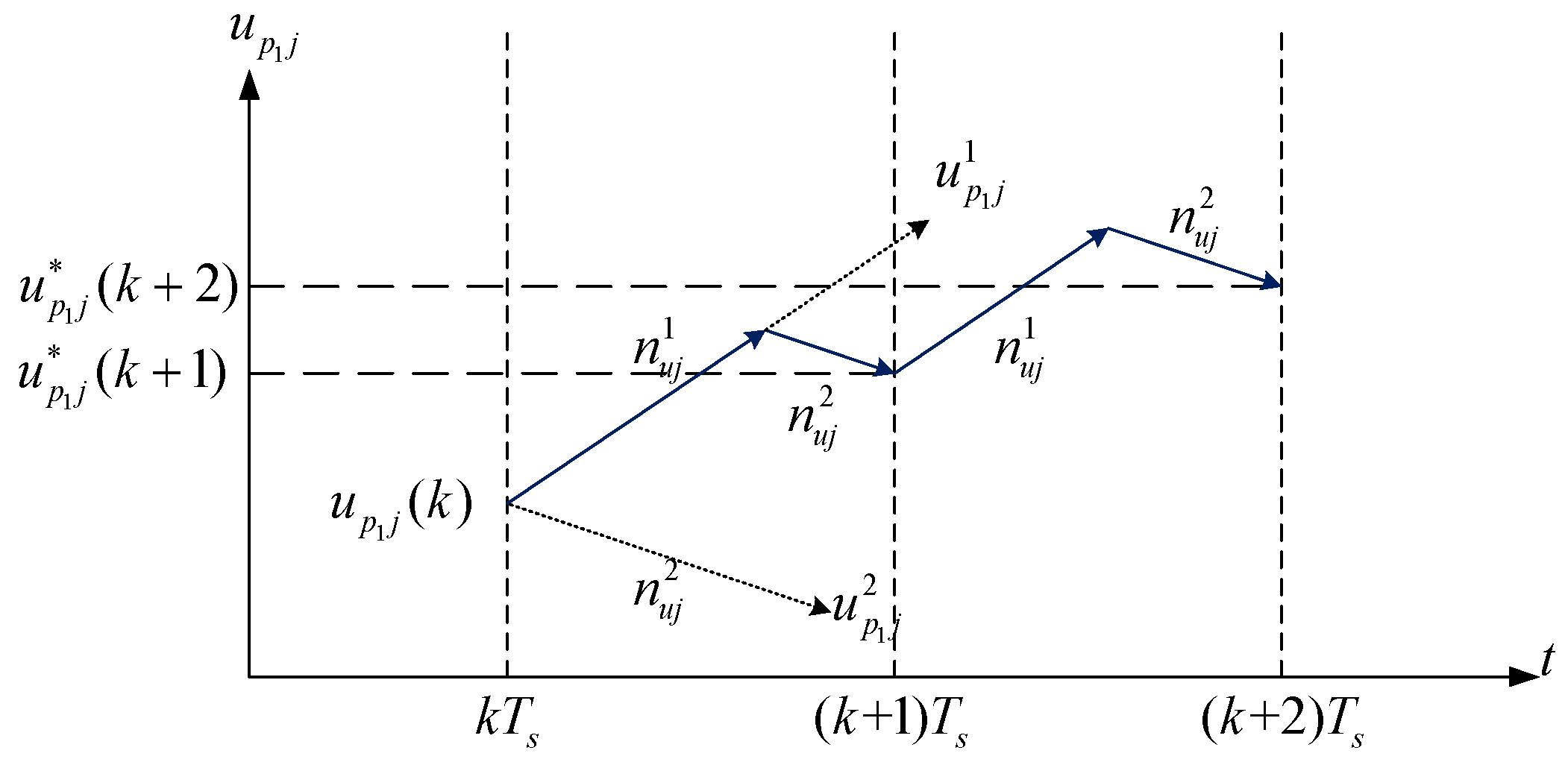
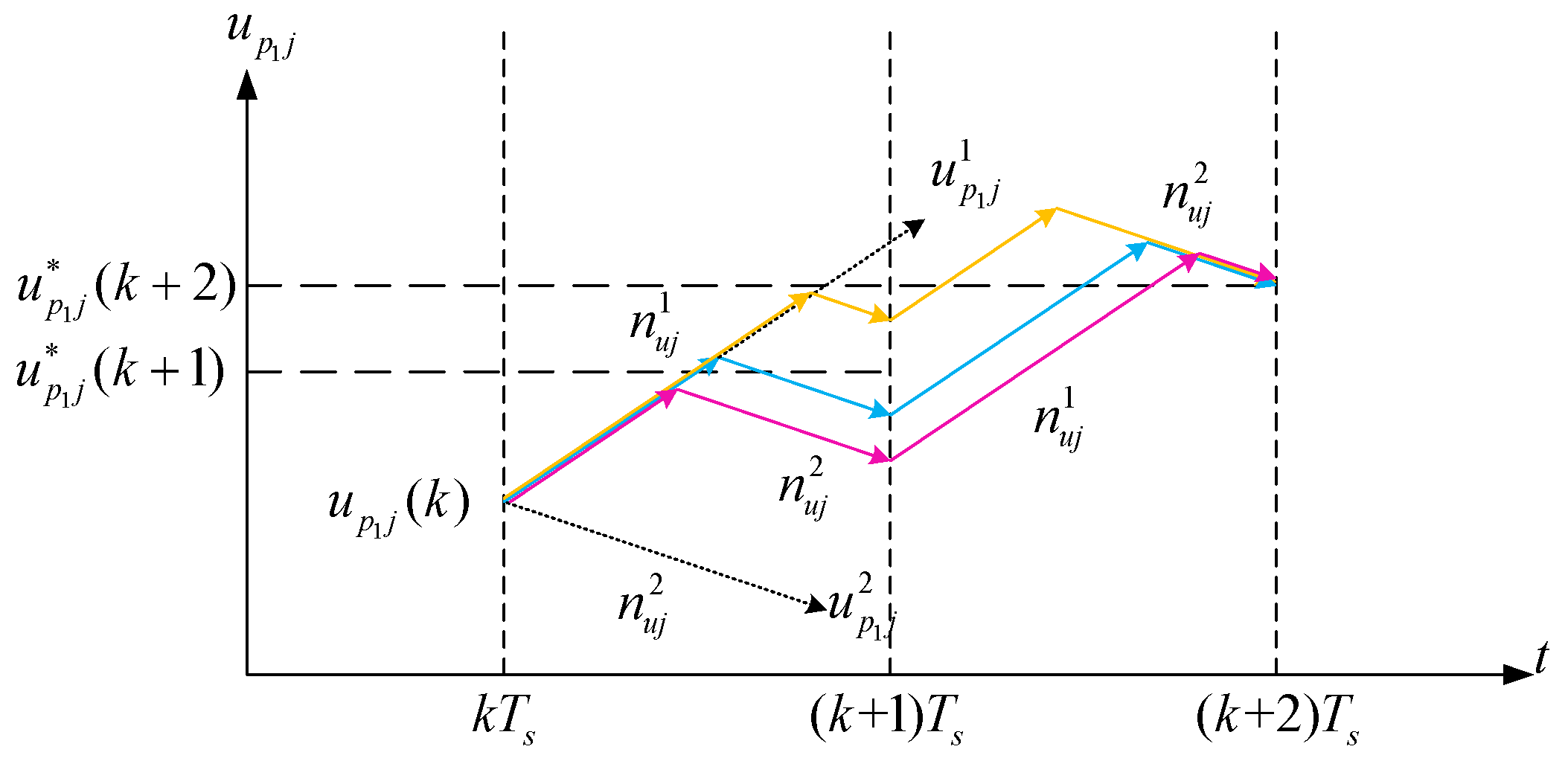
3.2. Improvement of the Model Predictive Control Algorithm
3.3. Total Cost Function and Duty Cycles
3.4. Improved Multi-Point DC Voltage Control Strategy
3.5. Implementation of the HM2PC Strategy
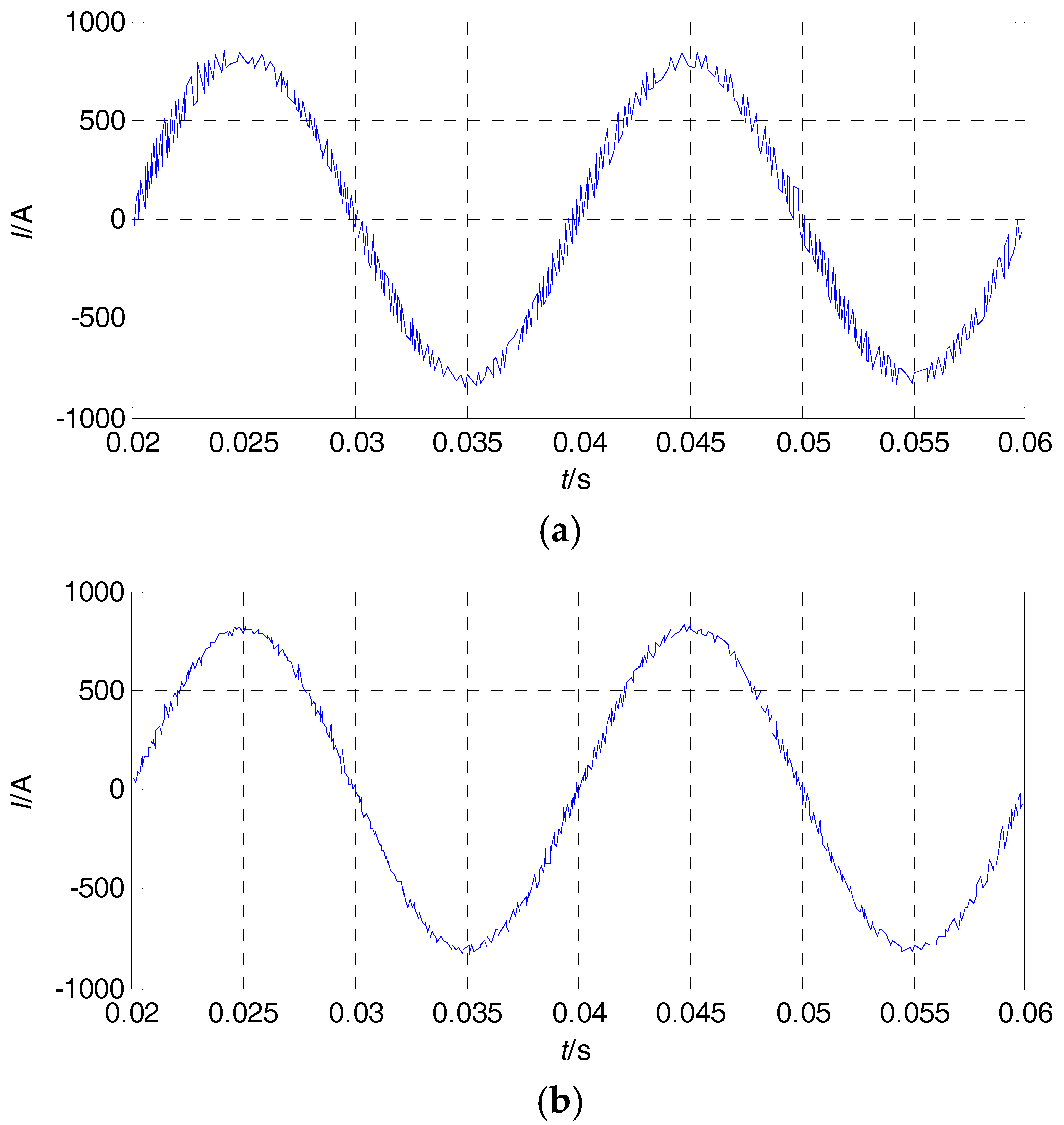
4. Simulation Results and Analysis
4.1. MMC Converters Connected to the Load
4.2. Regulation Station Supplemental Power During Load Fluctuation
4.3. Aimulating the Exit of the Main Control Station Due to Failure
5. The Scheme of Experimental Verification
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Nami, A.; Liang, J.; Dijkhuizen, F.; Demetriades, G.D. Modular Multilevel Converters for HVDC Applications: Review on Converter Cells and Functionalities. IEEE Trans. Power Electron. 2015, 30, 18–36. [Google Scholar] [CrossRef]
- Ni, Y.X.; Vittal, V.; Kliemann, W.; Fouad, A.A. Nonlinear modal interaction in HVDC/AC power systems with DC power modulation. IEEE Trans. Power Syst. 2015, 11, 2011–2017. [Google Scholar] [CrossRef]
- Li, X.; Song, Q.; Liu, W.; Rao, H.; Xu, S.; Li, L. Protection of Nonpermanent Faults on DC Overhead Lines in MMC-Based HVDC Systems. IEEE Trans. Power Deliv. 2013, 28, 483–490. [Google Scholar] [CrossRef]
- Aleenejad, M.; Mahmoudi, H.; Ahmadi, R. Unbalanced Space Vector Modulation with Fundamental Phase Shift Compensation for Faulty Multilevel Converters. IEEE Trans. Power Electron. 2016, 31, 7224–7233. [Google Scholar]
- Guo, C.; Zhao, C. Supply of an Entirely Passive AC Network through a Double-Infeed HVDC System. IEEE Trans. Power Electron. 2010, 25, 2835–2841. [Google Scholar]
- Lesnicar, A.; Marquardt, R. An innovative modular multilevel converter topology suitable for a wide power range. In Proceedings of the 2003 IEEE Bologna Power Tech Conference Proceedings, Bologna, Italy, 23–26 June 2003; Volume 3, p. 6. [Google Scholar]
- Gnanarathna, U.N.; Gole, A.M.; Jayasinghe, R.P. Efficient Modeling of Modular Multilevel HVDC Converters (MMC) on Electromagnetic Transient Simulation Programs. IEEE Trans. Power Deliv. 2015, 26, 316–324. [Google Scholar] [CrossRef]
- Zhang, L.; Harnefors, L.; Nee, H.P. Interconnection of two very weak ac systems by VSC-HVDC links using power-synchronization contro. IEEE Trans. Power Syst. 2011, 26, 344–355. [Google Scholar] [CrossRef]
- Aleenejad, M.; Mahmoudi, H.; Moamaei, P.; Ahmadi, R. A New Fault-Tolerant Strategy Based on a Modified Selective Harmonic Technique for Three-Phase Multilevel Converters with a Single Faulty Cell. IEEE Trans. Power Electron. 2016, 31, 3141–3150. [Google Scholar] [CrossRef]
- Aleenejad, M.; Mahmoudi, H.; Ahmadi, R. A Multi-Fault Tolerance Strategy for Three Phase Cascaded H-Bridge Converters Based on HalfWave Symmetrical Selective Harmonic Elimination Technique. IEEE Trans. Power Electron. 2016, 32, 7980–7989. [Google Scholar] [CrossRef]
- Zhang, L.; Harnefors, L.; Nee, H.P. Modeling and Control of VSC-HVDC Links Connected to Island Systems. IEEE Trans. Power Syst. 2011, 26, 783–793. [Google Scholar] [CrossRef]
- Wang, L. Model Predictive Control System Design and Implementation Using MATLAB; Springer Science & Business Media: London, UK, 2009. [Google Scholar]
- Yu, F.; Lin, W.; Wang, X.; Xie, D. Fast Voltage-Balancing Control and Fast Numerical Simulation Model for the Modular Multilevel Converter. IEEE Trans. Power Deliv. 2015, 30, 220–228. [Google Scholar] [CrossRef]
- Saad, H.; Guillaud, X.; Mahseredjian, J.; Dennetière, S.; Nguefeu, S. MMC Capacitor Voltage Decoupling and Balancing Controls. IEEE Trans. Power Deliv. 2015, 30, 704–712. [Google Scholar] [CrossRef]
- Moon, J.W.; Kim, C.S.; Park, J.W.; Kang, D.W.; Kim, J.M. Circulating Current Control in MMC Under the Unbalanced Voltage. IEEE Trans. Power Deliv. 2013, 28, 1952–1959. [Google Scholar] [CrossRef]
- Rodriguez, J.; Cortes, P. Predictive Control of Power Converters and Electrical Drives; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Preindl, M.; Bolognani, S. Optimal State Reference Computation with Constrained MTPA Criterion for PM Motor Drives. IEEE Trans. Power Electron. 2015, 30, 4524–4535. [Google Scholar] [CrossRef]
- Akter, M.P.; Mekhilef, S.; Tan, N.M.; Akagi, H. Model Predictive Control of Bidirectional AC-DC Converter for Energy Storage System. J. Electr. Eng. Technol. 2015, 10, 165–175. [Google Scholar] [CrossRef] [Green Version]
- Narimani, M.; Wu, B.; Yaramasu, V.; Cheng, Z.; Zargari, N.R. Finite Control-Set Model Predictive Control (FCS-MPC) of Nested Neutral Point-Clamped (NNPC) Converter. IEEE Trans. Power Electron. 2015, 30, 7262–7269. [Google Scholar] [CrossRef]
- Kouro, S.; Cortés, P.; Vargas, R.; Ammann, U.; Rodríguez, J. Model Predictive Control-A Simple and Powerful Method to Control Power Converters. IEEE Trans. Ind. Electron. 2009, 56, 1826–1838. [Google Scholar] [CrossRef]
- Geyer, T.; Papafotiou, G.; Morari, M. Model Predictive Direct Torque Control-PartI: Concept, Algorithm, and Analysis. IEEE Trans. Ind. Electron. 2009, 56, 1894–1905. [Google Scholar] [CrossRef]
- Papafotiou, G.; Kley, J.; Papadopoulos, K.G.; Bohren, P.; Morari, M. Model Predictive Direct Torque Control—Part II: Implementation and Experimental Evaluation. IEEE Trans. Ind. Electron. 2009, 56, 1906–1915. [Google Scholar] [CrossRef]
- Cortés, P.; Ortiz, G.; Yuz, J.I.; Rodríguez, J.; Vazquez, S.; Franquelo, L.G. Model Predictive Control of an Inverter With Output, Filter for UPS Applications. IEEE Trans. Ind. Electron. 2009, 56, 1875–1883. [Google Scholar] [CrossRef]
- Qin, J.; Saeedifard, M. Predictive Control of a Modular Multilevel Converter for a Back-to-Back HVDC System. IEEE Trans. Power Deliv. 2012, 27, 1538–1547. [Google Scholar]
- Mariethoz, S.; Fuchs, A.; Morari, M. A VSC-HVDC Decentralized Model Predictive Control Scheme for Fast Power Tracking. IEEE Trans. Power Deliv. 2014, 29, 462–471. [Google Scholar] [CrossRef]
- Preindl, M.; Schaltz, E.; Thogersen, P. Switching Frequency Reduction Using Model Predictive Direct Current Control for High-Power Voltage Source Inverters. IEEE Trans. Ind. Electron. 2011, 58, 2826–2835. [Google Scholar] [CrossRef]
- Xia, C.; Liu, T.; Shi, T.; Song, Z. A Simplified Finite-Control-Set Model-Predictive Control for Power Converters. IEEE Trans. Ind. Inform. 2014, 10, 991–1002. [Google Scholar]
- Zhang, Y.; Tai, N.; Xu, B. Fault Analysis and Traveling-Wave Protection Scheme for Bipolar HVDC Lines. IEEE Trans. Power Deliv. 2012, 27, 1583–1591. [Google Scholar] [CrossRef]
- Rashwan, A.; Sayed, M.A.; Mobarak, Y.; Shabib, G.; Senjyu, T. Predictive Controller Based on Switching State Grouping for a Modular Multilevel Converter with Reduced Computational Time. IEEE Trans. Power Deliv. 2017, 32, 2189–2198. [Google Scholar] [CrossRef]
- Bathurst, G.N.; Watson, N.R.; Arrillaga, J. Modeling of bipolar HVDC links in the harmonic domain. IEEE Trans. Power Deliv. 2002, 15, 1034–1038. [Google Scholar]
- Ilves, K.; Harnefors, L.; Norrga, S.; Nee, H.P. Predictive Sorting Algorithm for Modular Multilevel Converters Minimizing the Spread in the Submodule Capacitor Voltages. IEEE Trans. Power Electron. 2015, 30, 440–449. [Google Scholar] [CrossRef]
- Mahmoudi, H.; Aleenejad, M.; Ahmadi, R. A New Multiobjective Modulated Model Predictive Control Method with Adaptive Objective Prioritization. IEEE Trans. Ind. Appl. 2017, 53, 1188–1199. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quantity | Value |
|---|---|
| AC sources system nominal Voltage | 35 kV |
| Nominal DC voltage | ±10 kV |
| Rs | 0.1 Ω |
| Ls | 5 mH |
| Rp | 0.02 Ω |
| L2 | 1.3 mH |
| C2 | 200 μF |
| DC capacitance Cdc | 4700 μF |
| DC line length | 10 km |
| AC load system nominal voltage | 20 kV |
| The number of stations | 4 |
| Arm inductance L | 1 mH |
| Arm resistance R | 0.2 Ω |
| SM capacitor C | 1.2 mF |
| The number of SMs | 10 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Z.; Chu, J.; Gu, W.; Huang, Q.; Chen, L.; Yuan, X. Hybrid Modulated Model Predictive Control in a Modular Multilevel Converter for Multi-Terminal Direct Current Systems. Energies 2018, 11, 1861. https://doi.org/10.3390/en11071861
Wu Z, Chu J, Gu W, Huang Q, Chen L, Yuan X. Hybrid Modulated Model Predictive Control in a Modular Multilevel Converter for Multi-Terminal Direct Current Systems. Energies. 2018; 11(7):1861. https://doi.org/10.3390/en11071861
Chicago/Turabian StyleWu, Zhi, Jiawei Chu, Wei Gu, Qiang Huang, Liang Chen, and Xiaodong Yuan. 2018. "Hybrid Modulated Model Predictive Control in a Modular Multilevel Converter for Multi-Terminal Direct Current Systems" Energies 11, no. 7: 1861. https://doi.org/10.3390/en11071861
APA StyleWu, Z., Chu, J., Gu, W., Huang, Q., Chen, L., & Yuan, X. (2018). Hybrid Modulated Model Predictive Control in a Modular Multilevel Converter for Multi-Terminal Direct Current Systems. Energies, 11(7), 1861. https://doi.org/10.3390/en11071861