A Novel Single-Terminal Fault Location Method for AC Transmission Lines in a MMC-HVDC-Based AC/DC Hybrid System


Abstract
:1. Introduction
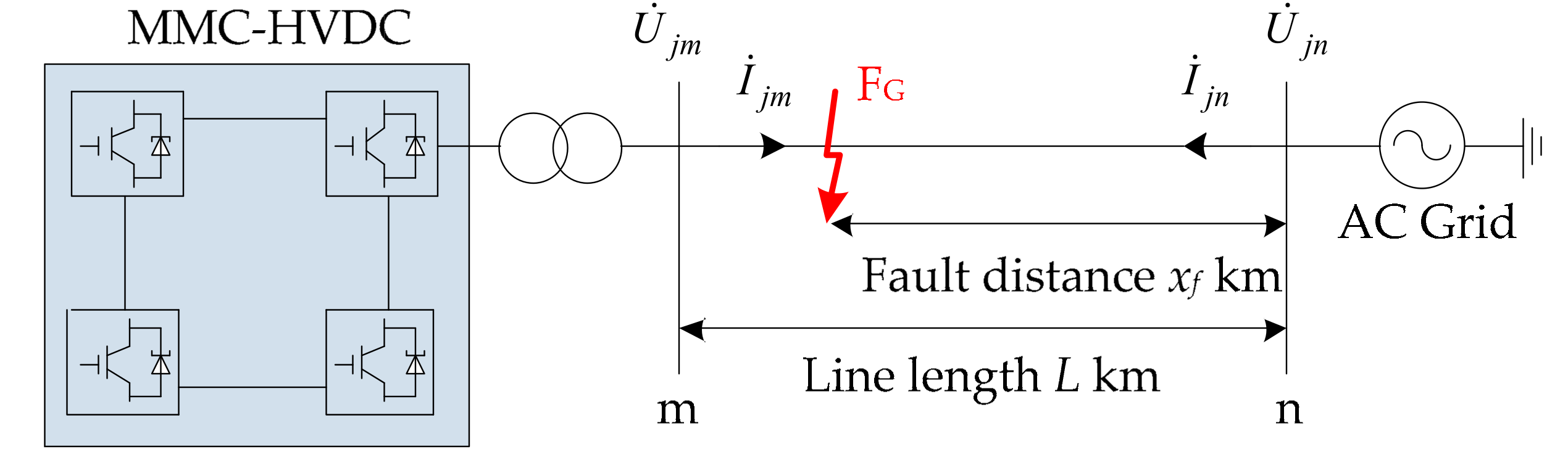
2. Control System of the AC/DC Hybrid System
3. The Fault Location Method
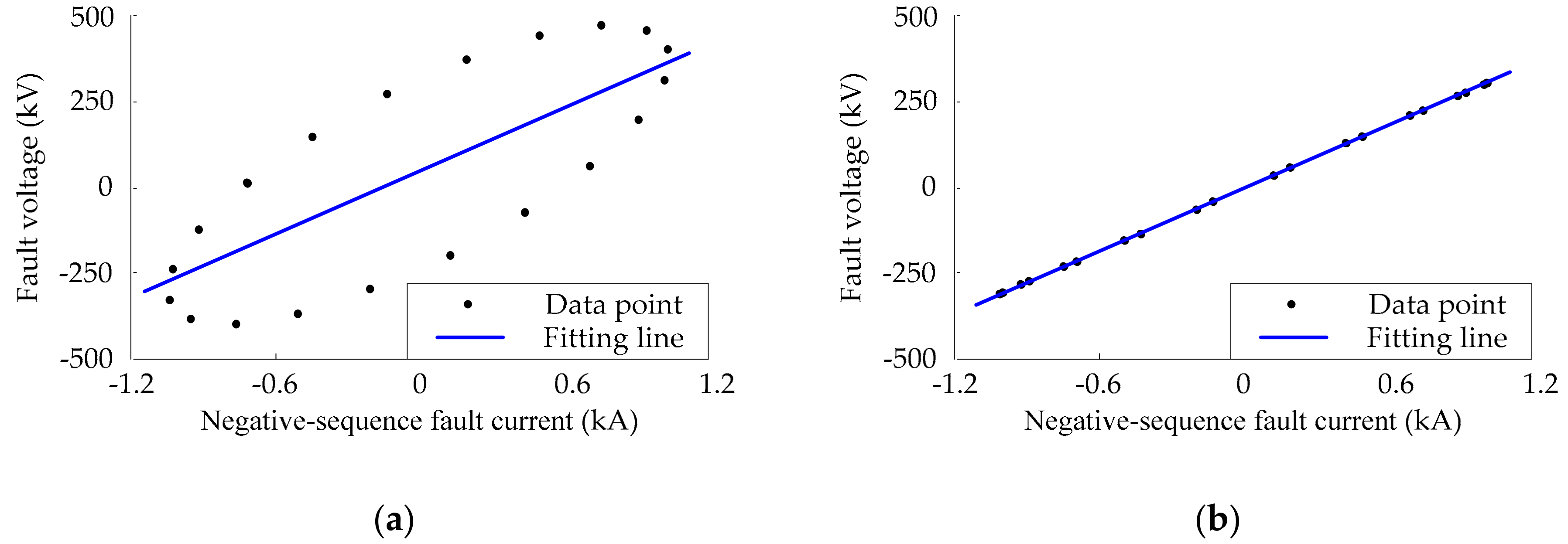
3.1. Principle of the Proposed Method
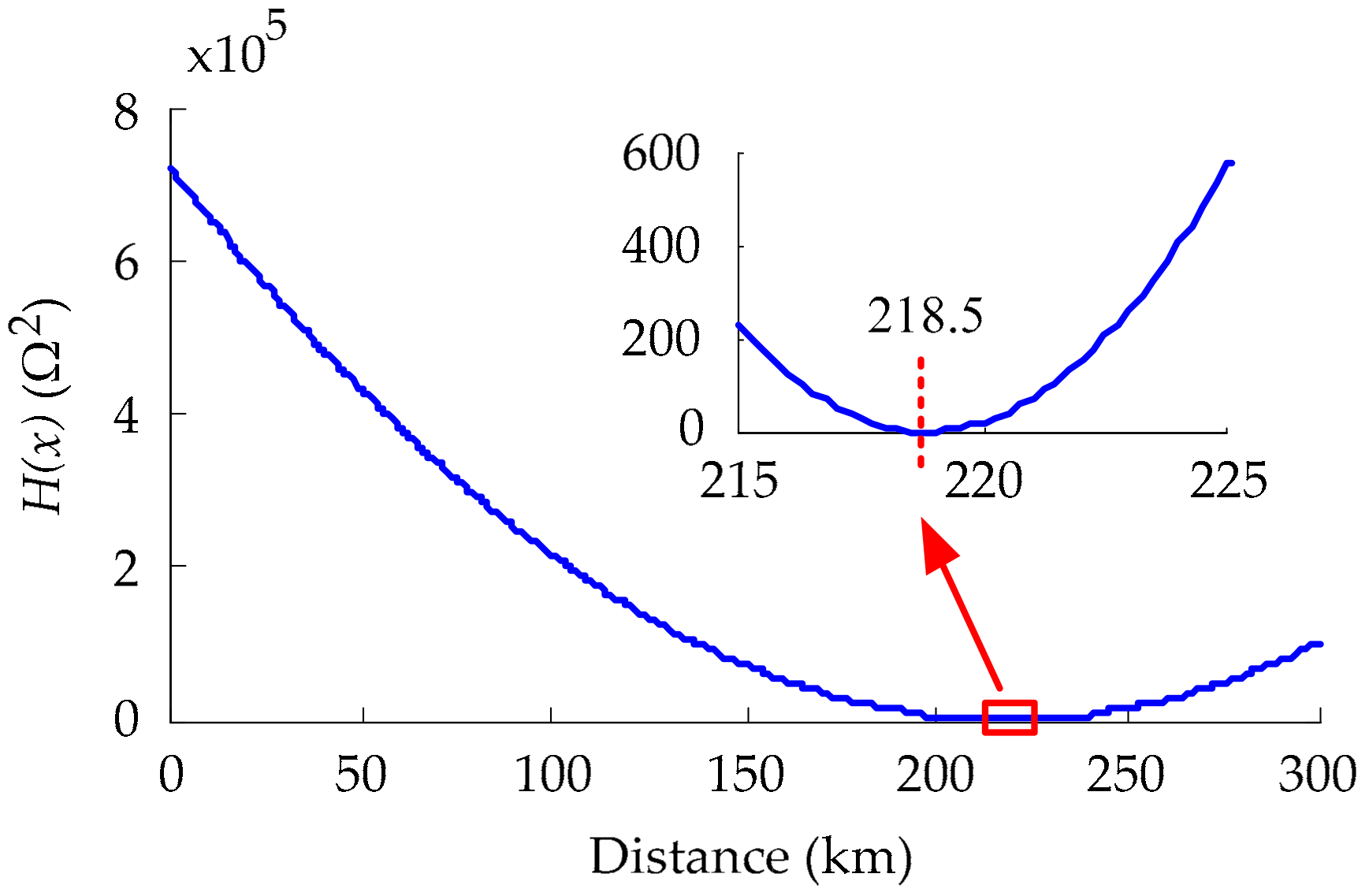
3.2. Criterion of the Proposed Method
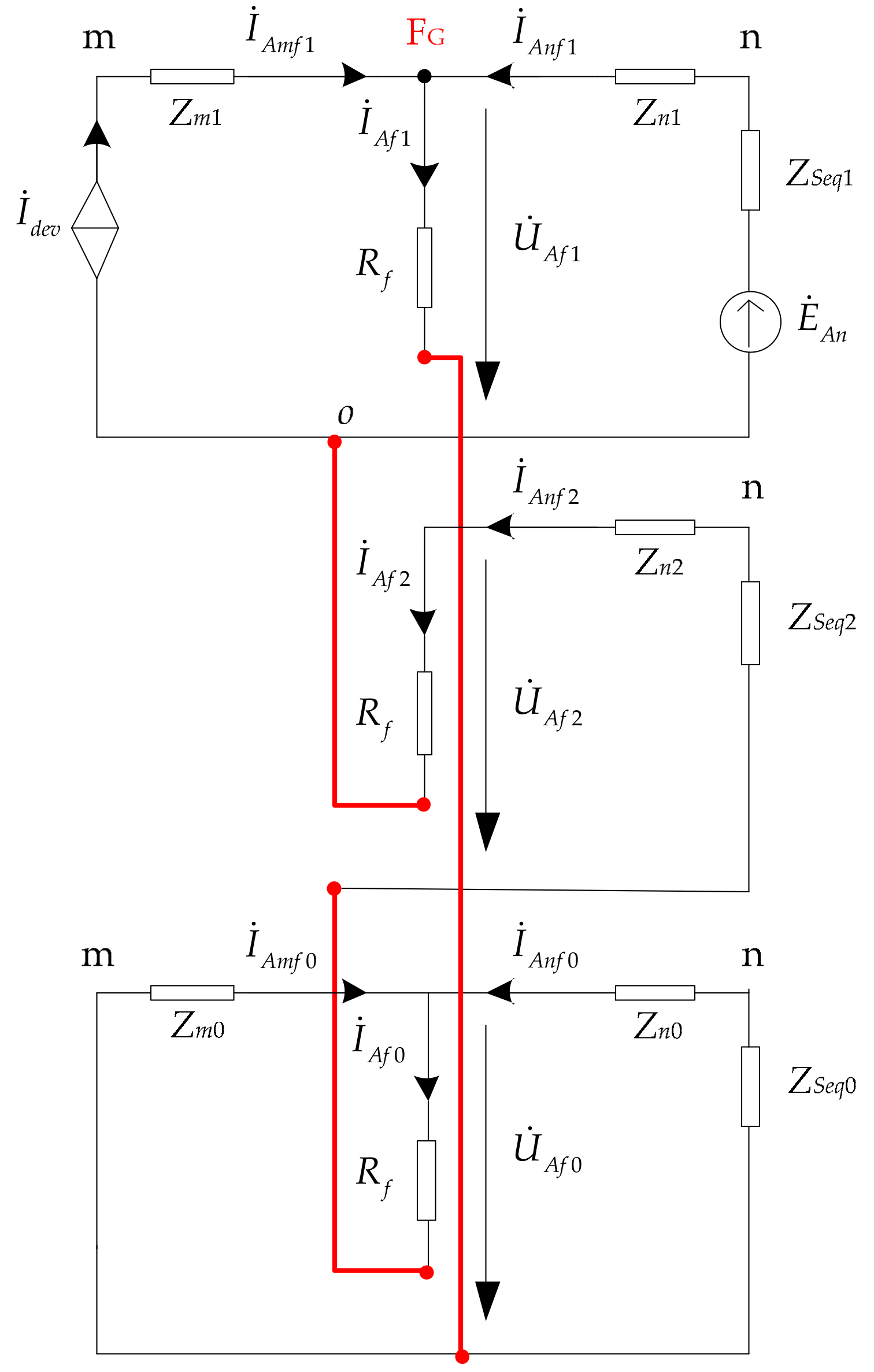
3.3. Calculation Method for the Fault Voltage and the Negative-Sequence Fault Current
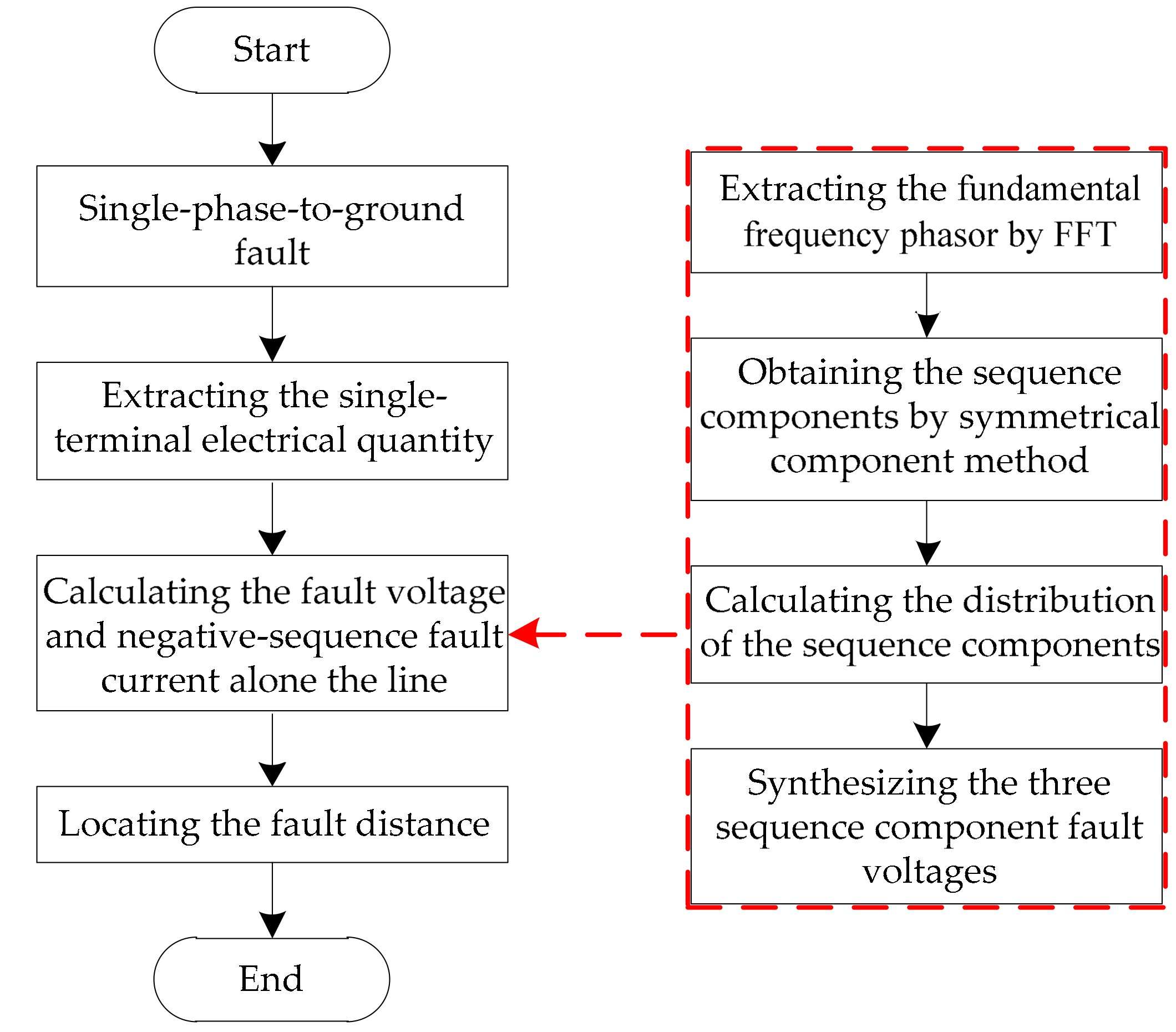
- The fundamental frequency electrical quantity can be extracted from the bus n side by fast fourier transform with a window of sampling data.
- In the frequency domain, the symmetrical component method is used to obtain the sequence components of the fault voltage and fault current.
- Under the sequence component, the line parameters corresponding to the sequence components are substituted into Equation (11), respectively. As a result, the distribution of negative-sequence fault current, positive-, negative-, and zero-sequence fault voltages in the fault phase along the line can be calculated.
- By using the phase-model reverse transformation matrix, the three sequence component fault voltages are synthesized into the fault phase voltage.
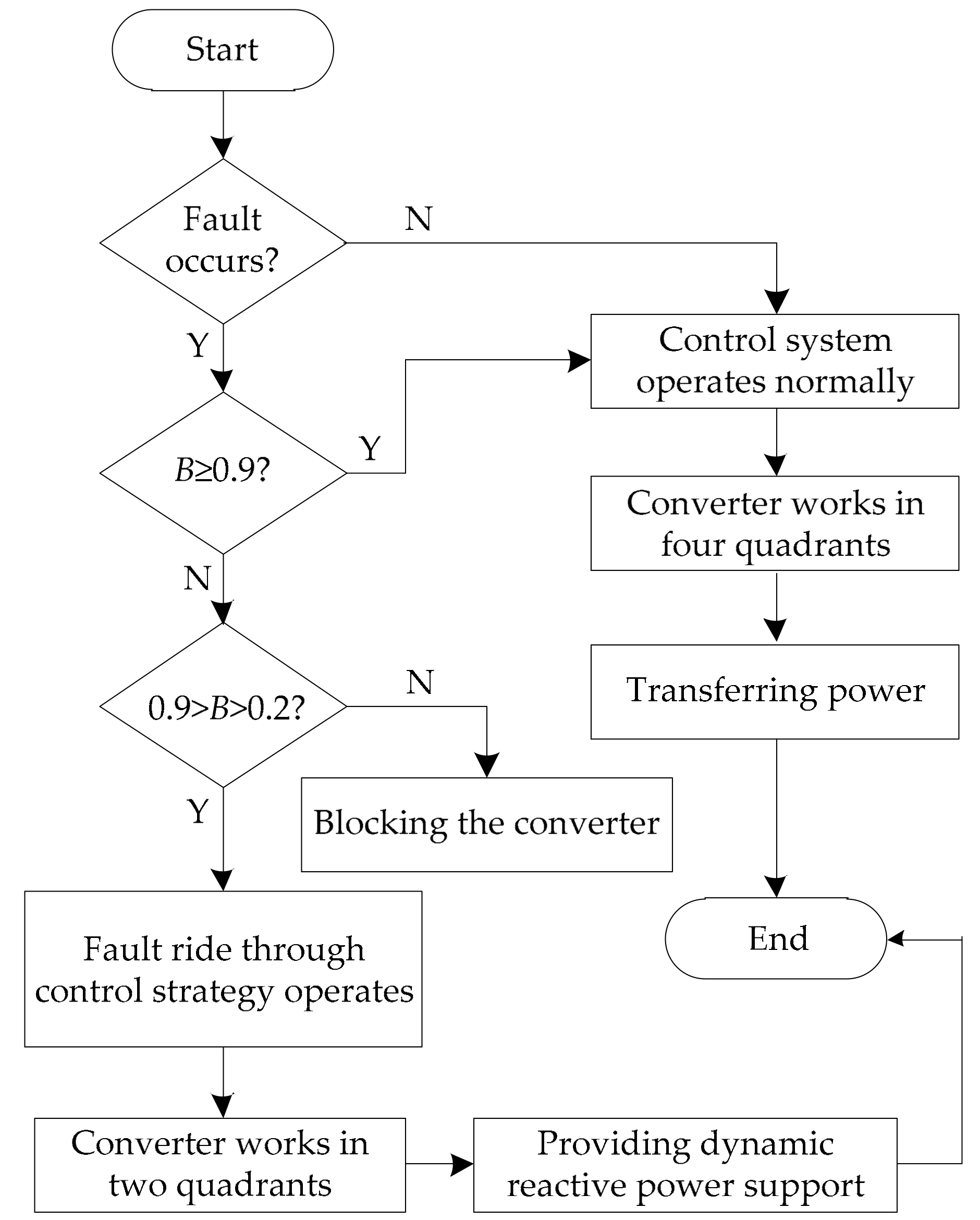
3.4. The Process of the Fault Location Method
- The single-phase-to-ground fault can be detected through the protection method proposed in [27], and the fault phase can also be selected.
- The single-terminal electrical quantity of the traditional power source side is extracted.
- The fault voltage and the negative-sequence fault current distributing along the fault phase line are calculated by the method introduced in Section 3.3.
- In the time domain, a data set is obtained, which consists of the fault voltage and the negative-sequence fault current at different times, for each distance along the fault phase line, and the criterion introduced in the Section 3.2 is used to locate the fault distance.
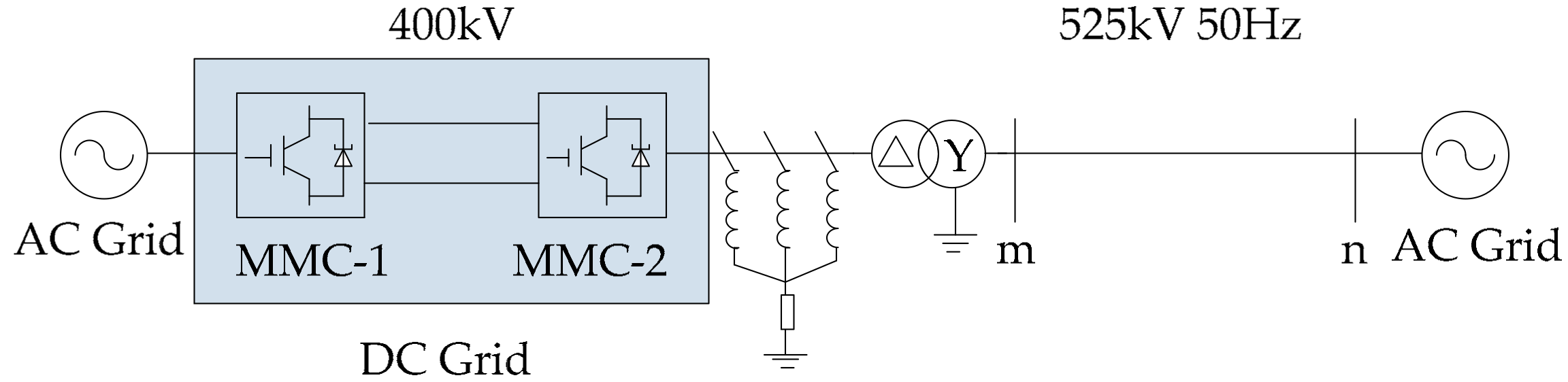
4. Simulation and Verification
4.1. Case Study
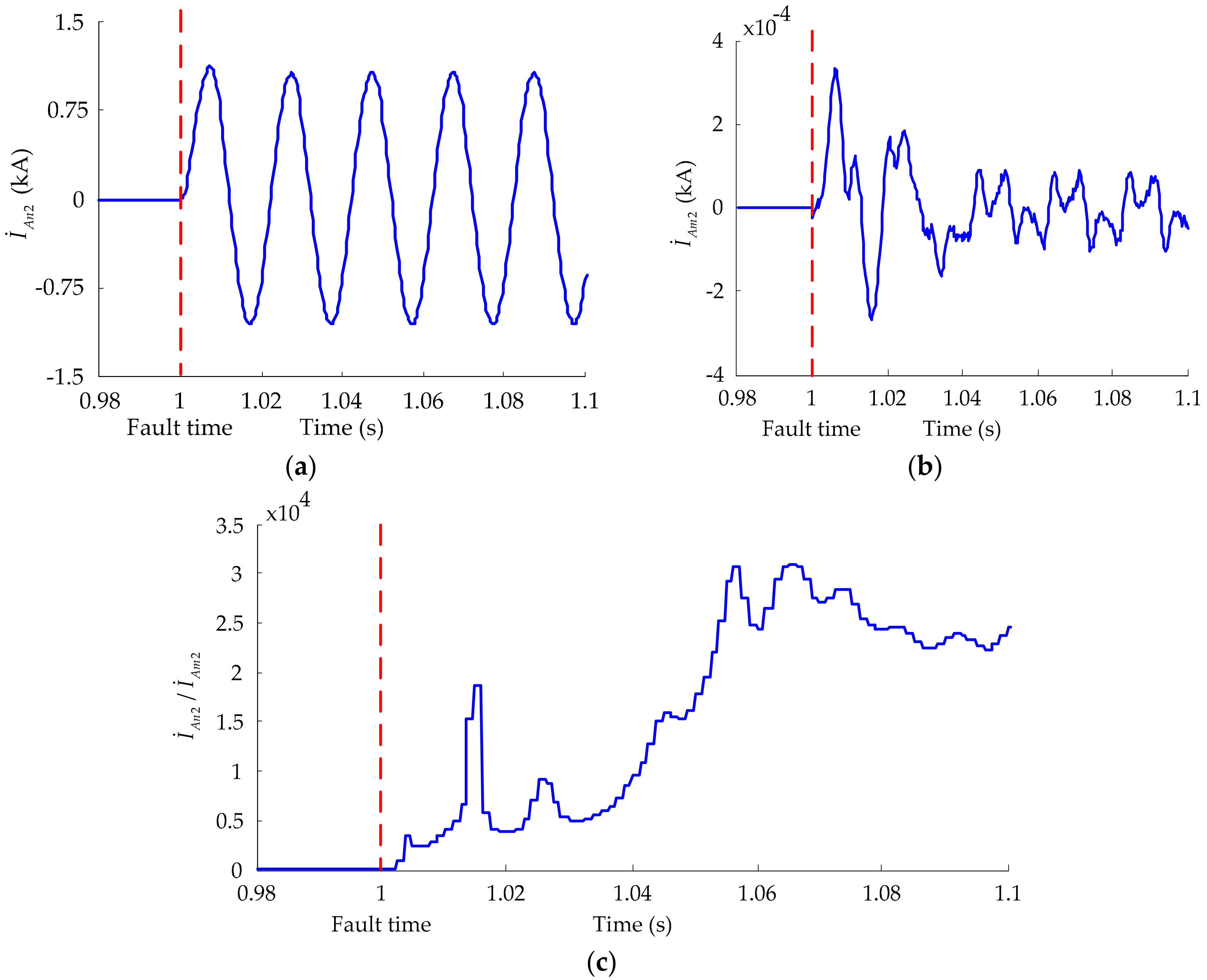
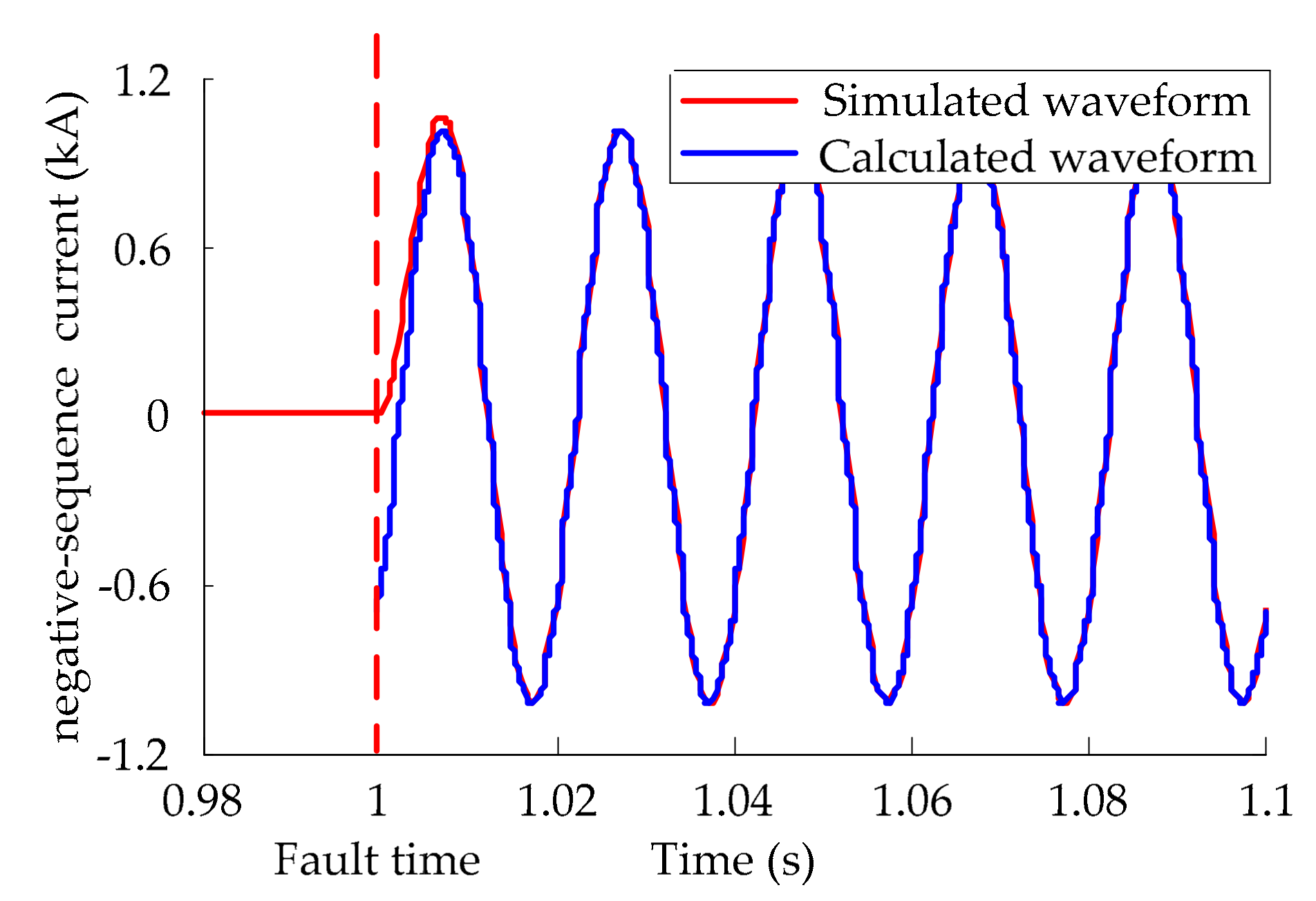
4.2. Simulation Results
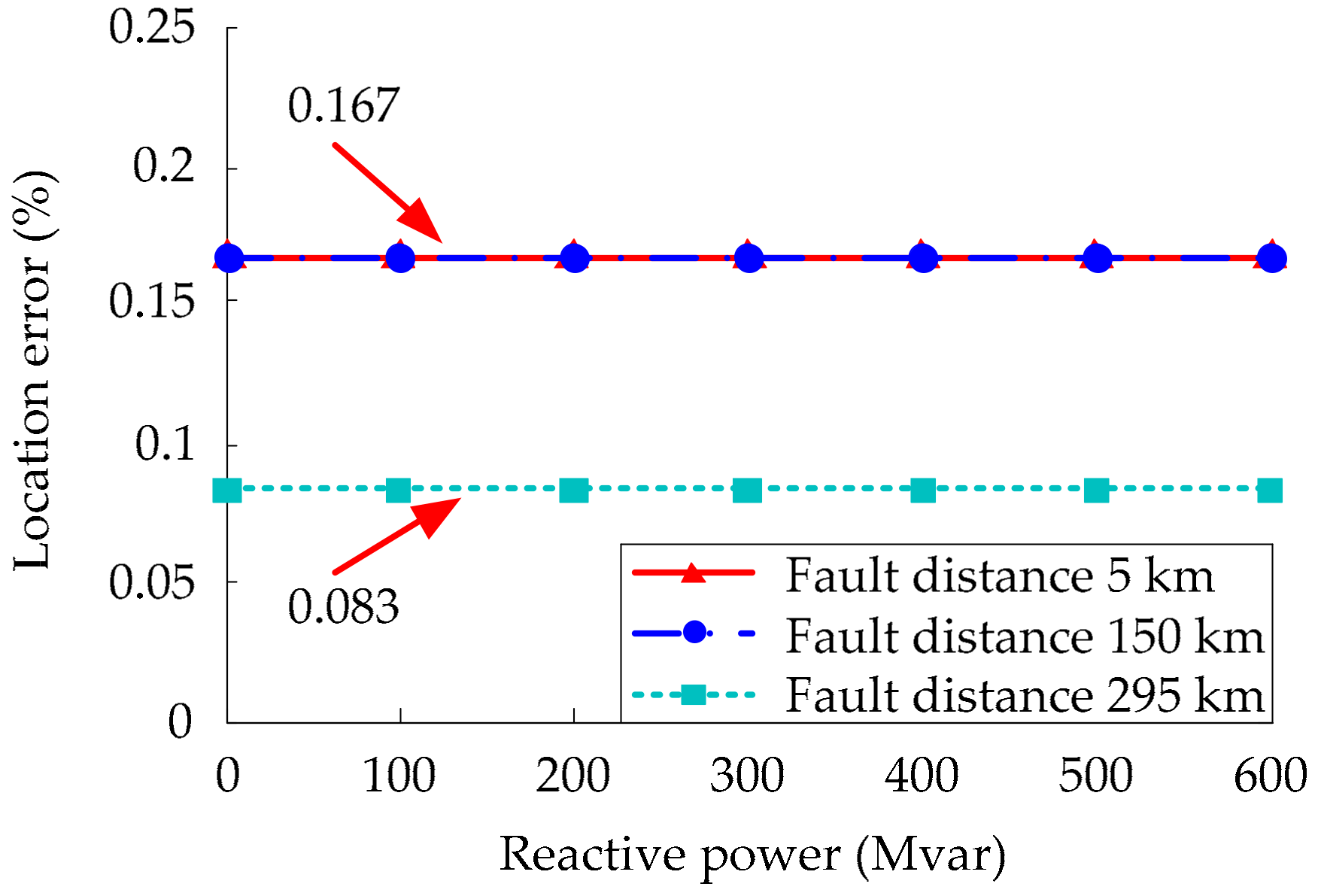
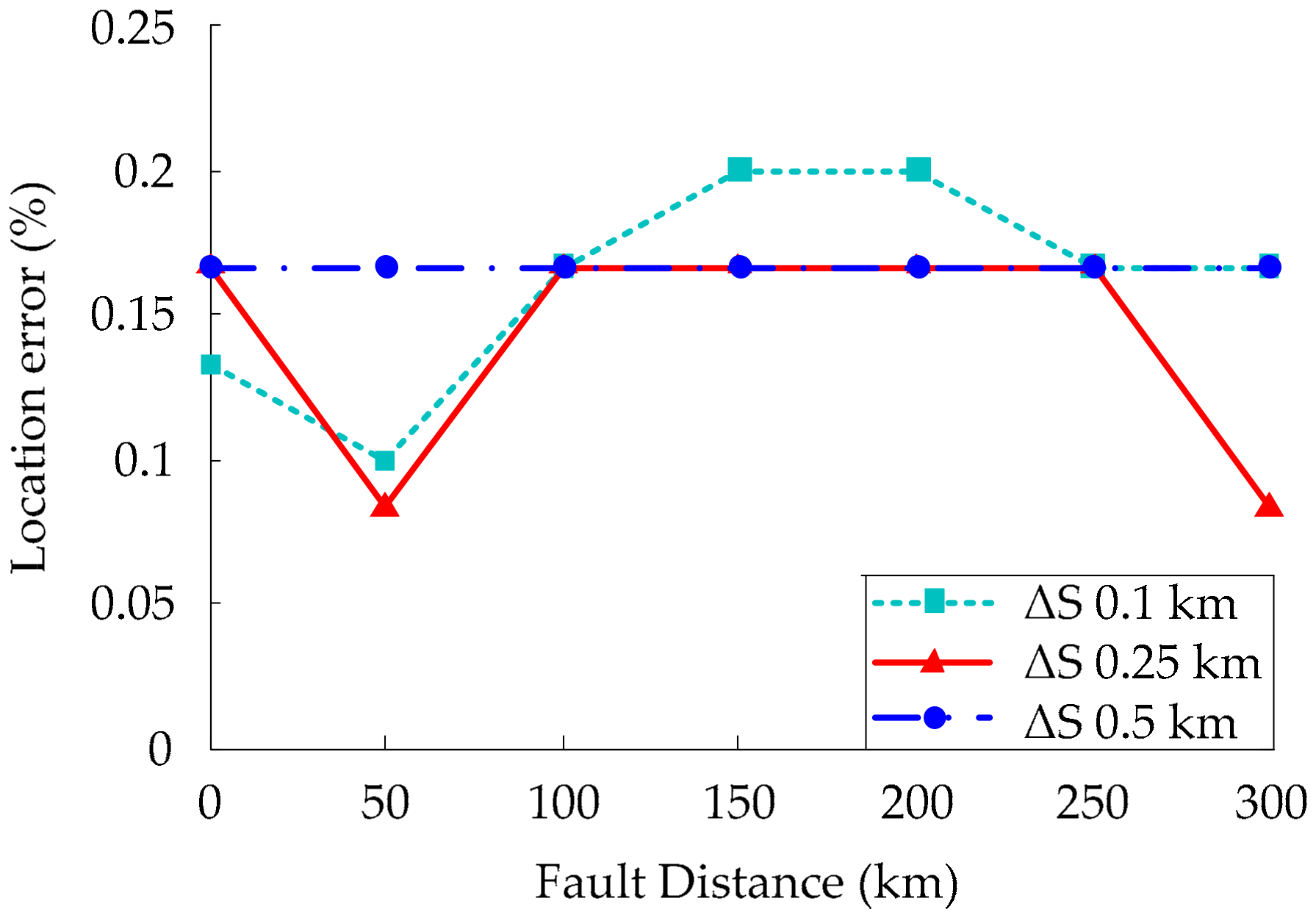
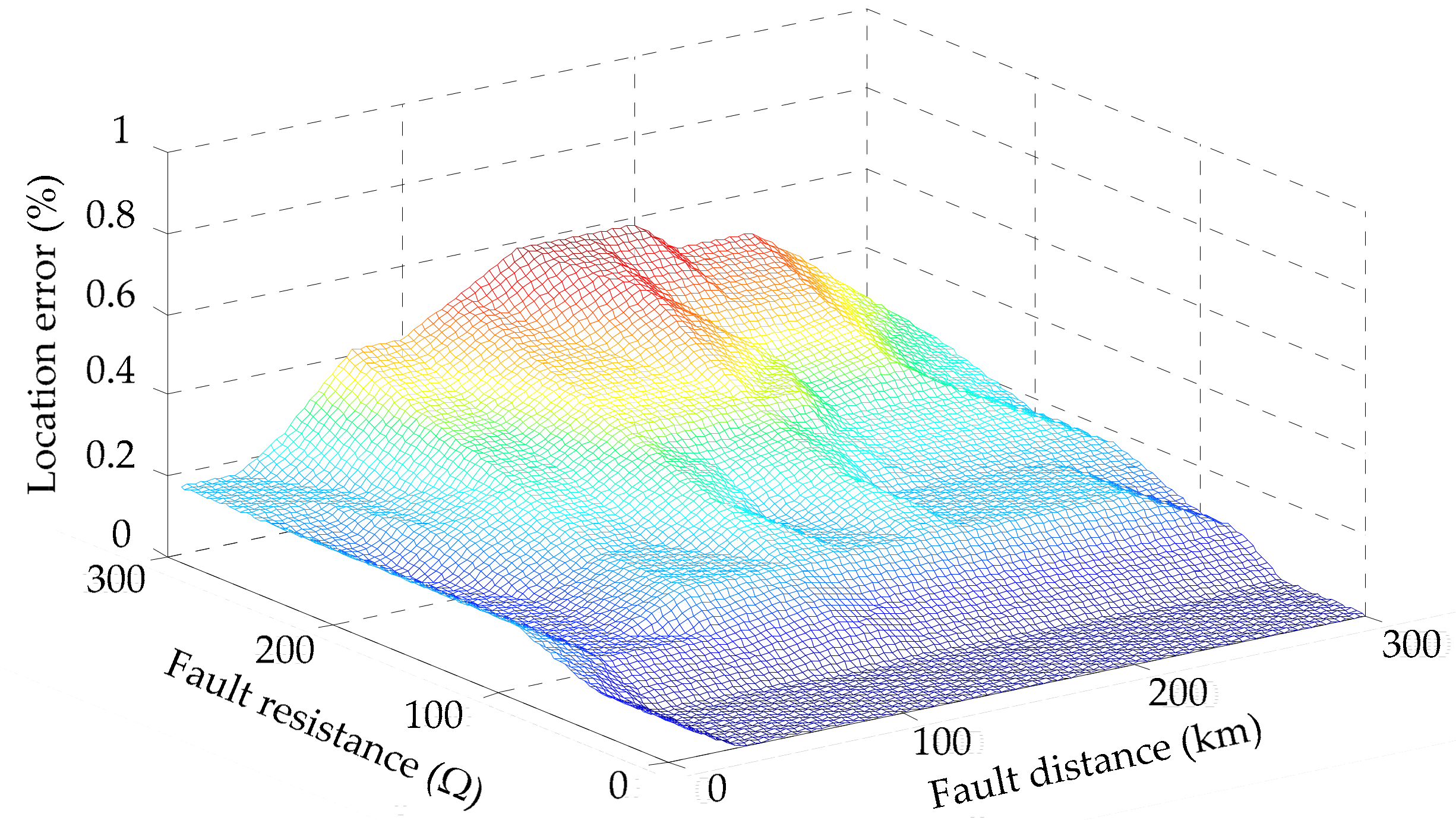
4.3. Performance Evaluation
5. Conclusions
- It solves the problem that the traditional fault location methods are not applicable.
- It is not affected by specific fault ride through control strategy of the MMC-based converter.
- It has a high ranging precision, which is hardly affected by fault resistance, fault distance, sampling frequency, and the distributed capacitance of the line.
- It has extensive applicability, which is applicable to the AC transmission line with a traditional power source, and an MMC-based converter that adopts a negative-sequence current restraint strategy, or voltage source converter-interfaced distributed generators.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| MMC-HVDC | Modular multilevel converter based high voltage direct current |
| FG | Single-phase-to-ground fault |
| The voltage phasor of the bus | |
| The current phasor flowing from the bus | |
| B | The ratio between the actual positive sequence voltage of the AC bus and the rating |
| L | The total length of the line mn |
| xf | Random fault distance from the bus n. |
| The command reference of the negative-sequence active power current | |
| The command reference of the negative-sequence reactive power current | |
| The current flowing from the bus m under a phase-A-to-ground fault | |
| The positive- and zero-sequence components of | |
| The current flowing from the bus n under a phase-A-to-ground fault | |
| The positive-, negative- and zero-sequence components of | |
| Rf | Fault grounding resistance |
| The residual voltage of the fault point in phase A | |
| The current flowing through the fault branch in phase A | |
| The output current of the controlled positive-sequence current source | |
| The fault sequence components current at the fault point from the bus m side | |
| The fault sequence components current at the fault point from the bus n side | |
| Zm1,0 | The sequence impedances between the bus m and the fault point |
| Zn1,2,0 | The sequence impedances between the bus n and the fault point |
| ZSeq1,2,0 | The equivalent sequence impedances of the AC network at the back side of bus n |
| The fault voltage data set | |
| The negative-sequence fault current data set | |
| H(x) | The residual sum function |
| The proportional coefficient | |
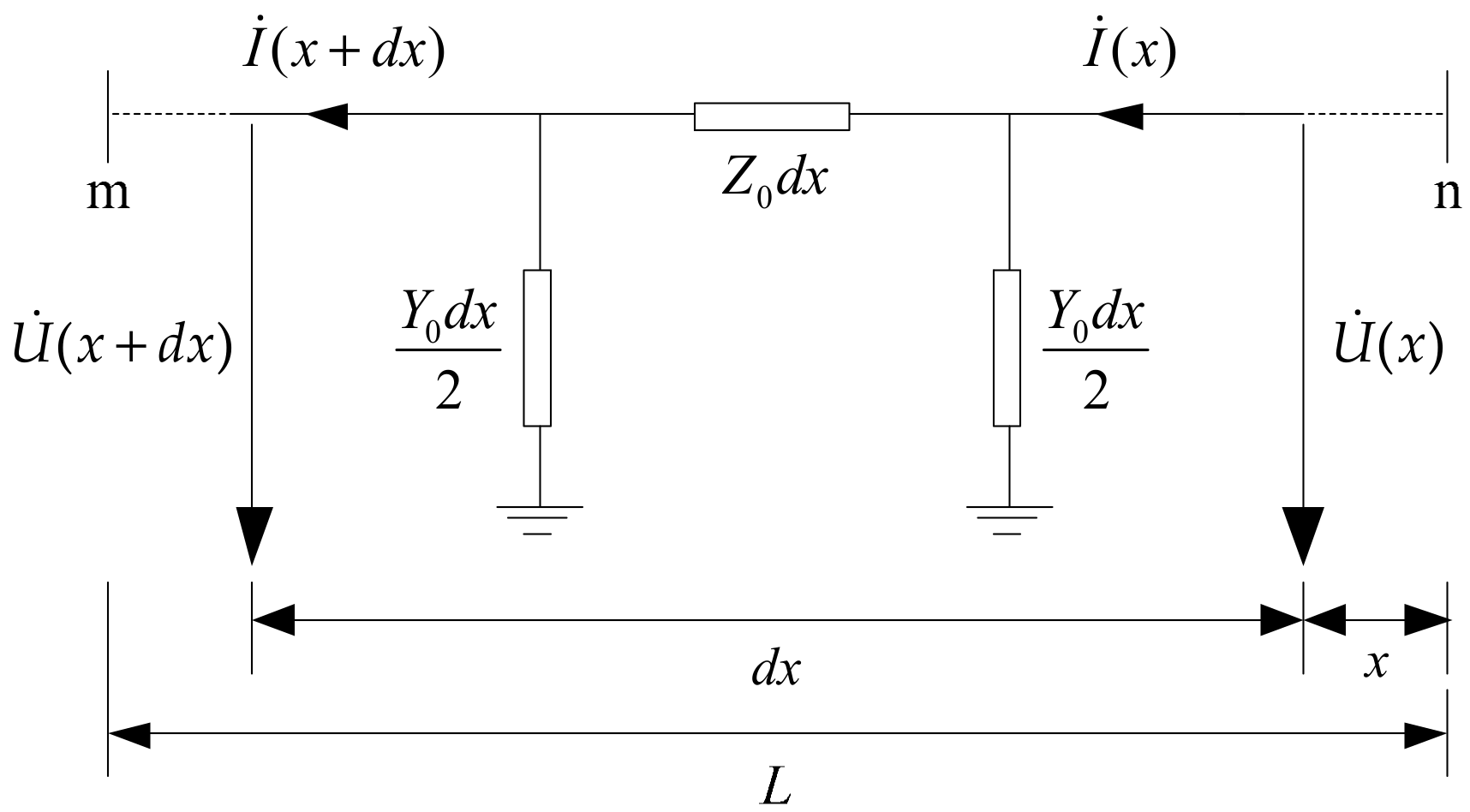
| The series impedance per unit length of the line | |
| The shunt admittance per unit length of the line | |
| dx | An infinitesimal section |
| The fundamental frequency voltage phasor of the bus n | |
| The fundamental frequency current phasor of the bus n | |
| The characteristic impedance of the line | |
| The propagation constant | |
| TS | Symmetrical component transformation matrix |
| ΔS | The calculating step |
| The ratio between negative-sequence currents flowing from both sides |
References
- Debnath, S.; Qin, J.; Bahrani, B.; Saeedifard, M.; Barbosa, P. Operation, control, and applications of the modular multilevel converter: A review. IEEE Trans. Power Electron. 2014, 30, 37–53. [Google Scholar] [CrossRef]
- Institute of Electrical and Electronics Engineers (IEEE). IEEE Guide for Determining Fault Location on AC Transmission and Distribution Lines; IEEE Std.: New York, NY, USA, 2015. [Google Scholar]
- Shi, X.; Wang, Z.; Liu, B.; Liu, Y.; Tolbert, L.M.; Wang, F. Characteristic investigation and control of a modular multilevel converter-based HVDC system under single-line-to-ground fault conditions. IEEE Trans. Power Electron. 2014, 30, 408–421. [Google Scholar] [CrossRef]
- Hamidi, R.J.; Livani, H. Traveling-wave-based fault-location algorithm for hybrid multiterminal circuits. IEEE Trans. Power Deliv. 2017, 32, 135–144. [Google Scholar] [CrossRef]
- Lopes, F.V.; Dantas, K.M.; Silva, K.M.; Costa, F.B. Accurate two-terminal transmission line fault location using traveling waves. IEEE Trans. Power Deliv. 2018, 33, 873–880. [Google Scholar] [CrossRef]
- Moravej, Z.; Movahhedneya, M.; Pazoki, M. Gabor transform-based fault location method for multi-terminal transmission lines. Measurement 2018, 125, 667–679. [Google Scholar] [CrossRef]
- Thukaram, D.; Khincha, H.P.; Vijaynarasimha, H.P. Artificial neural network and support vector machine approach for locating faults in radial distribution systems. IEEE Trans. Power Deliv. 2005, 20, 710–721. [Google Scholar] [CrossRef]
- Fei, C.G.; Qi, G.Y.; Li, C.X. Fault location on high voltage transmission line by applying support vector regression with fault signal amplitudes. Electr. Power Syst. Res. 2018, 160, 173–179. [Google Scholar] [CrossRef]
- Chen, Y.Q.; Fink, O.; Sansavini, G. Combined fault location and classification for power transmission lines fault diagnosis with integrated feature extraction. IEEE Trans. Ind. Electron. 2018, 65, 561–569. [Google Scholar] [CrossRef]
- Elsadd, M.A.; Abdelaziz, A.Y. Unsynchronized fault-location technique for two- and three-terminal transmission lines. Electr. Power Syst. Res. 2018, 158, 228–239. [Google Scholar] [CrossRef]
- Hinge, T.; Dambhare, S. Synchronised/unsynchronised measurements based novel fault location algorithm for transmission line. IET Gener. Transm. Distrib. 2018, 12, 1493–1500. [Google Scholar] [CrossRef]
- Deng, Y.; He, Z.; Fu, L.; Lin, S.; Liu, L.; Zhang, J. Research on fault location scheme for inverter AC transmission line of AC–DC hybrid system. IEEJ Trans. Electr. Electron. 2018, 13, 455–462. [Google Scholar] [CrossRef]
- Sachdev, M.S.; Baribeau, M.A. A new algorithm for digital impedance relays. IEEE Trans. Power App. Syst. 1979, 98, 2232–2240. [Google Scholar] [CrossRef]
- Adu, T. A new transmission line fault locating system. IEEE Trans. Power Deliv. 2001, 16, 498–503. [Google Scholar] [CrossRef]
- Farshad, M.; Sadeh, J. Accurate single-phase fault-location method for transmission lines based on k-nearest neighbor algorithm using one-end voltage. IEEE Trans. Power Deliv. 2012, 27, 2360–2367. [Google Scholar] [CrossRef]
- Radojevic, Z.M.; Shin, J.R. New one terminal digital algorithm for adaptive reclosing and fault distance calculation on transmission lines. IEEE Trans. Power Deliv. 2006, 21, 1231–1237. [Google Scholar] [CrossRef]
- Ramar, K.; Low, H.S.; Ngu, E.E. One-end impedance based fault location in double-circuit transmission lines with different configurations. Int. J. Electr. Power Energy Syst. 2015, 64, 1159–1165. [Google Scholar] [CrossRef]
- Tian, B.; Li, Z.X.; Yao, Y.; Wang, L.; Wang, X. Six-sequence component based single ended fault location method of transmission line. In Proceedings of the 2016 International Conference on Electrical Engineering and Automation (ICEEA 2016), Xiamen, China, 18–19 December 2016. [Google Scholar]
- Wang, B.; Dong, X.; Lan, L.; Xu, F. Novel location algorithm for single-line-to-ground faults in transmission line with distributed parameters. IET Gener. Transm. Distrib. 2013, 7, 560–566. [Google Scholar] [CrossRef]
- Das, S.; Singh, S.P.; Panigrahi, B.K. Transmission line fault detection and location using wide area measurements. Electr. Power Syst. Res. 2017, 151, 96–105. [Google Scholar] [CrossRef]
- Dobakhshari, A.S. Wide-area fault location of transmission lines by hybrid synchronized/unsynchronized voltage measurements. IEEE Trans. Smart Grid 2018, 9, 1869–1877. [Google Scholar] [CrossRef]
- Leon, A.E.; Mauricio, J.M.; Solsona, J.A.; Gomez-Exposito, A. Adaptive control strategy for VSC-based systems under unbalanced network conditions. IEEE Trans. Smart Grid 2010, 1, 311–319. [Google Scholar] [CrossRef]
- Chen, K.; Huang, C.; He, J. Fault detection, classification and location for transmission lines and distribution systems: A review on the methods. High Volt. 2016, 1, 25–33. [Google Scholar] [CrossRef]
- Ahmed, N.; Angquist, L.; Mahmood, S.; Antonopoulos, A.; Harnefors, L.; Norrga, S.; Nee, H.P. Efficient modeling of an MMC-based multiterminal DC system employing hybrid HVDC breakers. IEEE Trans. Power Deliv. 2015, 30, 1792–1801. [Google Scholar] [CrossRef]
- Song, H.S.; Nam, K. Dual current control scheme for PWM converter under unbalanced input voltage conditions. IEEE Trans. Ind. Electron. 1999, 46, 953–959. [Google Scholar] [CrossRef]
- Lee, S.J.; Kang, J.K.; Sul, S.K. A new phase detecting method for power conversion systems considering distorted conditions in power system. In Proceedings of the IEEE Industry Applications Conference: Thirty-Fourth IAS Annual Meeting, Phoenix, AZ, USA, 3–7 October 1999. [Google Scholar]
- Xue, S.; Yang, J.; Chen, Y.; Wang, C.; Shi, Z.; Cui, M.; Li, B. The applicability of traditional protection methods to lines emanating from VSC-HVDC interconnectors and a novel protection principle. Energies 2016, 9, 400. [Google Scholar] [CrossRef]
- Guan, M.; Xu, Z. Modeling and control of a modular multilevel converter-based HVDC system under unbalanced grid conditions. IEEE Trans. Power Electron. 2012, 27, 4858–4867. [Google Scholar] [CrossRef]
- Xue, S.; Shi, Z.; Huang, R.; Chang, Q.; Lu, J.; Yang, J. A criterion for non-voltage directional elements applied in AC networks connected with VSC-based interconnection devices. IEEE Trans. Power Electron. 2017, 13, 143–149. [Google Scholar] [CrossRef]
- Hu, J.; Xu, K.; Lin, L.; Zeng, R. Analysis and enhanced control of hybrid-MMC-based HVDC systems during asymmetrical DC voltage faults. IEEE Trans. Power Deliv. 2017, 32, 1394–1403. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Parameter | Parameter Value |
|---|---|
| DC Voltage/kV | ±400 |
| AC Voltage/kV | 525 |
| Transformer ratio | 525/380 |
| Rated transmission power/MVA | 1000 |
| System frequency/Hz | 50 |
| Grounding electrode resistance/Ω | 1000 |
| Grounding electrode inductance/H | 3 |
| Transmission line length/km | 300 |
| Positive-sequence resistance/(Ω/km) | 0.034676 |
| Positive-sequence inductance/(mH/km) | 1.347616 |
| Positive-sequence capacitance/(nF/km) | 8.6771 |
| Zero-sequence resistance/(Ω/km) | 0.300023 |
| Zero-sequence inductance/(mH/km) | 3.63714 |
| Zero-sequence capacitance/(nF/km) | 6.16105 |
| Sampling frequency/kHz | 3.2 |
| Sampling time/ms | 10 |
| Calculation step ΔS/km | 0.25 |
| Actual Fault Distance/km | Sampling Frequency/kHz | Calculated Fault Distance/km | Fault Location Error/% |
|---|---|---|---|
| 5 | 1 | 5.50 | 0.167 |
| 3.2 | 5.50 | 0.167 | |
| 5 | 5.50 | 0.167 | |
| 150 | 1 | 150.50 | 0.167 |
| 3.2 | 150.50 | 0.167 | |
| 5 | 150.50 | 0.167 | |
| 295 | 1 | 295.25 | 0.083 |
| 3.2 | 295.25 | 0.083 | |
| 5 | 295.25 | 0.083 |
| Actual Fault Distance/km | Fault Resistance/Ω | Calculated Fault Distance/km | Fault Location Error/% |
|---|---|---|---|
| 5 | 0 | 5.25 | 0.083 |
| 100 | 5.50 | 0.167 | |
| 300 | 5.50 | 0.167 | |
| 50 | 0 | 50.00 | 0.000 |
| 100 | 50.25 | 0.083 | |
| 300 | 50.75 | 0.250 | |
| 100 | 0 | 100.00 | 0.000 |
| 100 | 100.50 | 0.167 | |
| 300 | 101.25 | 0.417 | |
| 150 | 0 | 150.00 | 0.000 |
| 100 | 150.50 | 0.167 | |
| 300 | 151.75 | 0.583 | |
| 200 | 0 | 200.00 | 0.000 |
| 100 | 200.50 | 0.167 | |
| 300 | 201.75 | 0.583 | |
| 250 | 0 | 250.00 | 0.000 |
| 100 | 250.50 | 0.167 | |
| 300 | 251.50 | 0.500 | |
| 295 | 0 | 295.00 | 0.000 |
| 100 | 295.25 | 0.083 | |
| 300 | 295.75 | 0.250 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xue, S.; Lu, J.; Liu, C.; Sun, Y.; Liu, B.; Gu, C. A Novel Single-Terminal Fault Location Method for AC Transmission Lines in a MMC-HVDC-Based AC/DC Hybrid System. Energies 2018, 11, 2066. https://doi.org/10.3390/en11082066
Xue S, Lu J, Liu C, Sun Y, Liu B, Gu C. A Novel Single-Terminal Fault Location Method for AC Transmission Lines in a MMC-HVDC-Based AC/DC Hybrid System. Energies. 2018; 11(8):2066. https://doi.org/10.3390/en11082066
Chicago/Turabian StyleXue, Shimin, Junchi Lu, Chong Liu, Yabing Sun, Baibing Liu, and Cheng Gu. 2018. "A Novel Single-Terminal Fault Location Method for AC Transmission Lines in a MMC-HVDC-Based AC/DC Hybrid System" Energies 11, no. 8: 2066. https://doi.org/10.3390/en11082066
APA StyleXue, S., Lu, J., Liu, C., Sun, Y., Liu, B., & Gu, C. (2018). A Novel Single-Terminal Fault Location Method for AC Transmission Lines in a MMC-HVDC-Based AC/DC Hybrid System. Energies, 11(8), 2066. https://doi.org/10.3390/en11082066