Maintenance Factor Identification in Outdoor Lighting Installations Using Simulation and Optimization Techniques



Abstract
:1. Introduction
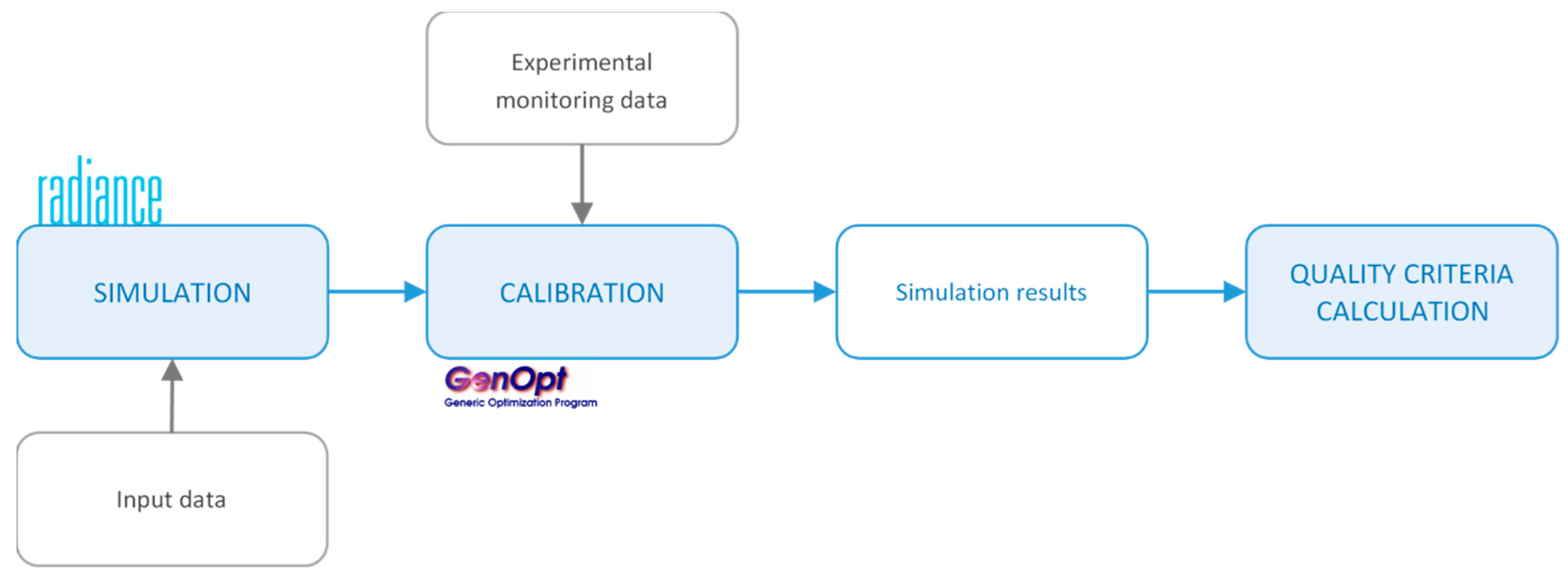
2. Methodology
2.1 Modeling and Simulation of Artificial Lighting
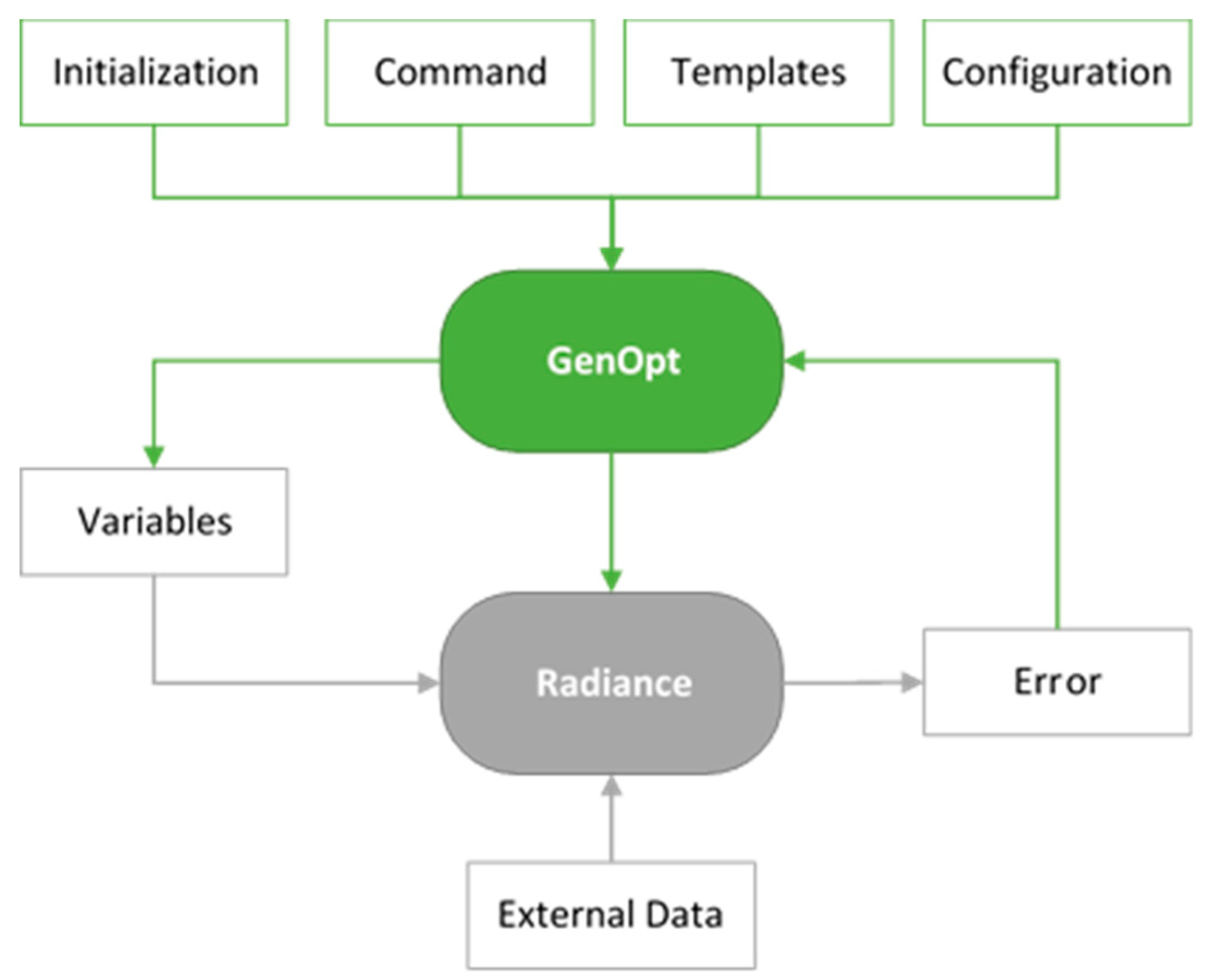
2.2 Calibration of the Lighting Scene
3. Experimental System
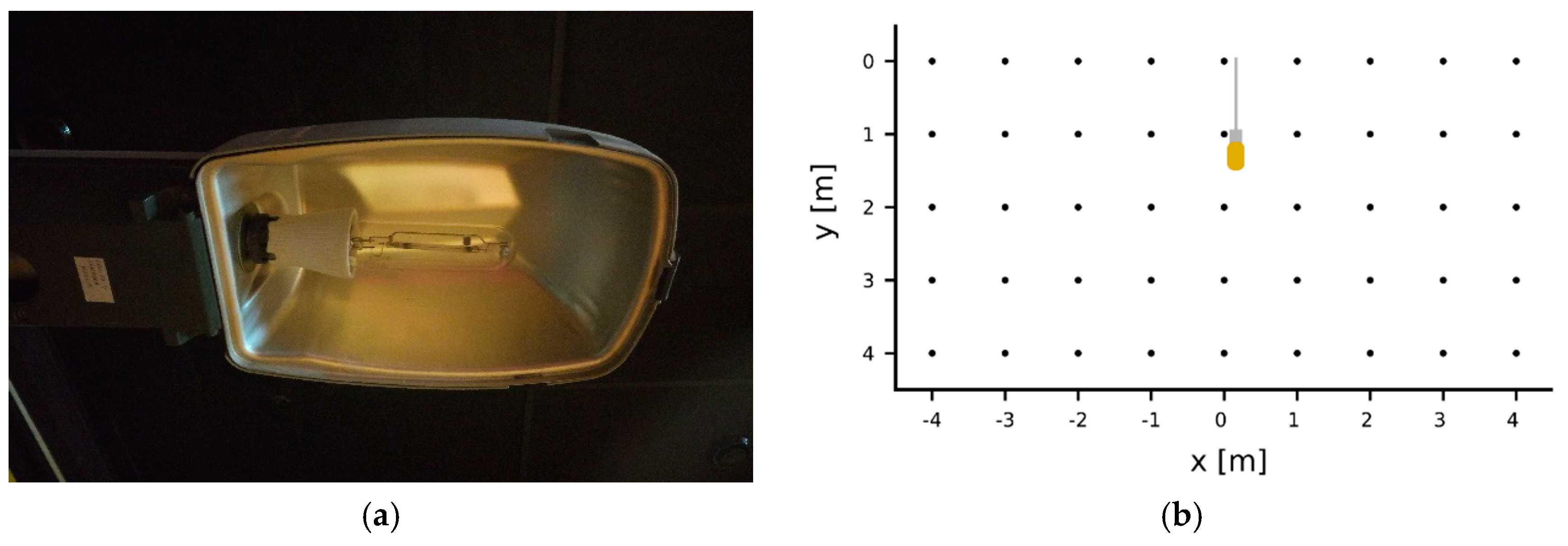
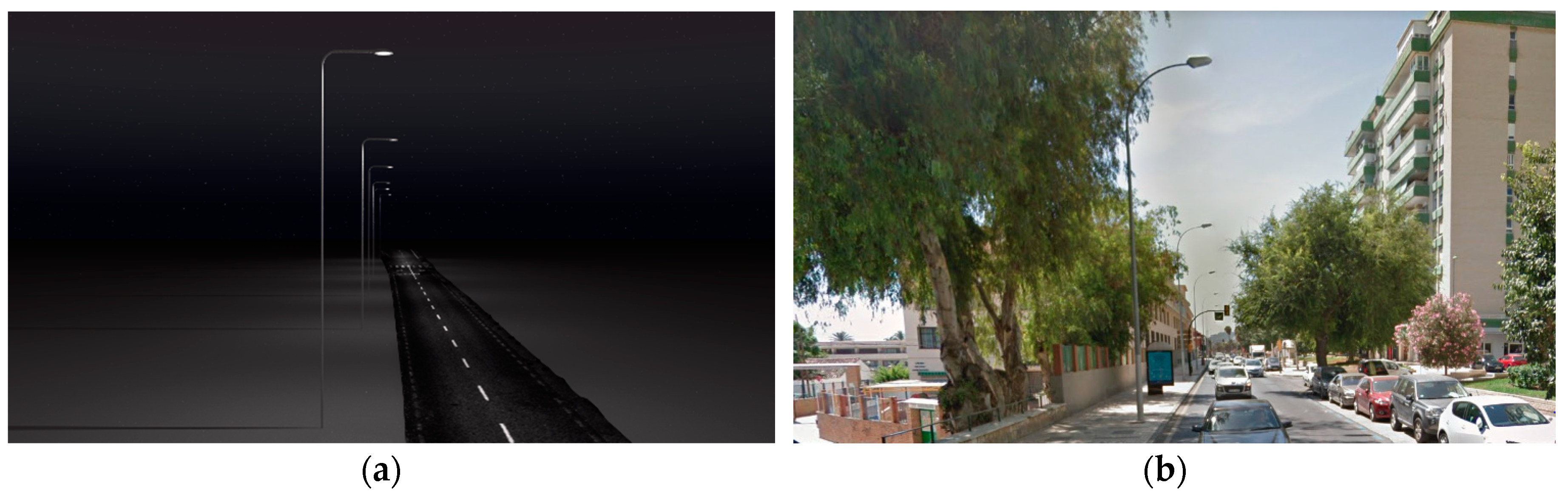
3.1 Single Street Lamp Facility
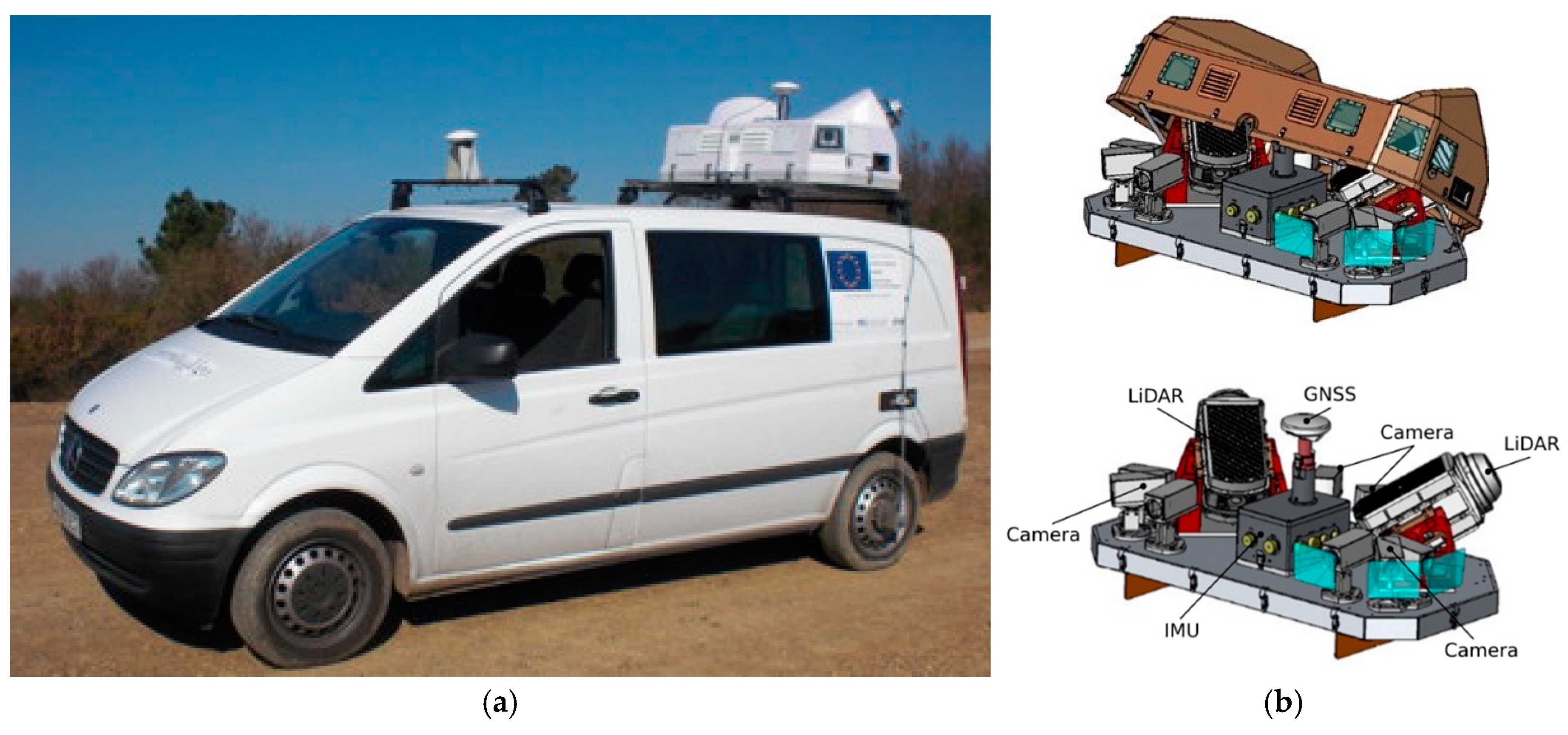
3.2 Road Street Lighting Facility
4. Results and Discussion
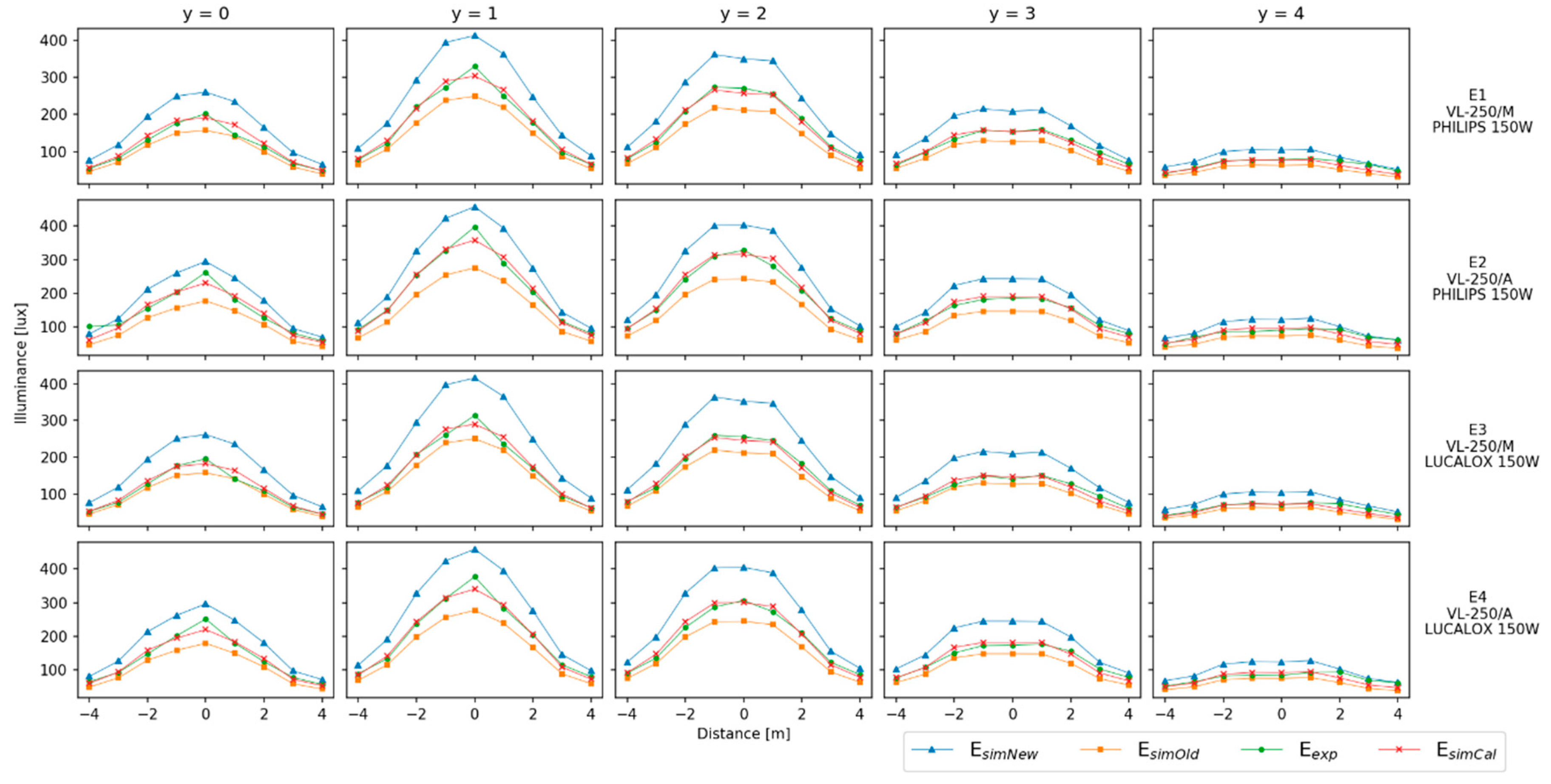
4.1 Single Street Lamp Results
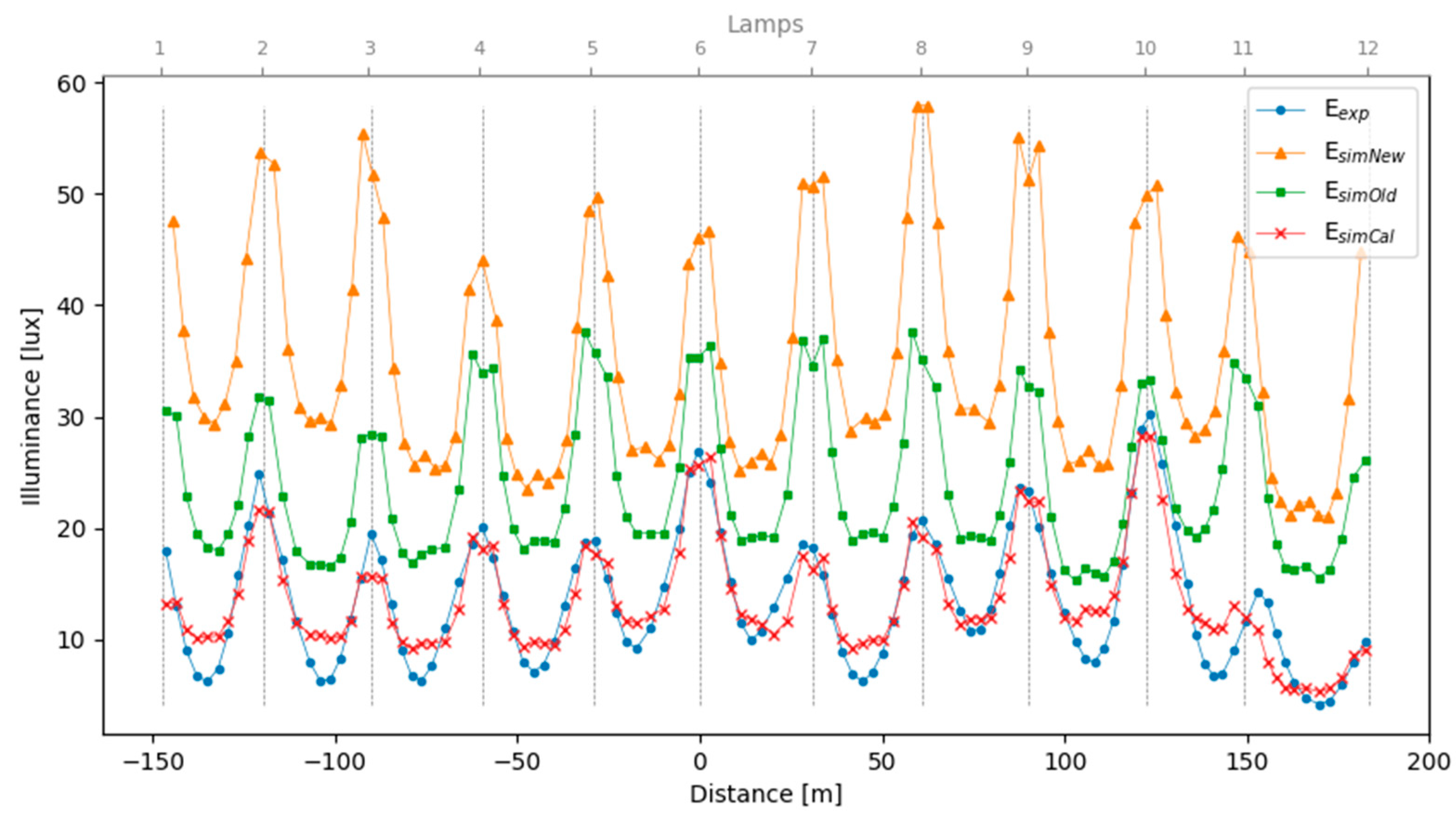
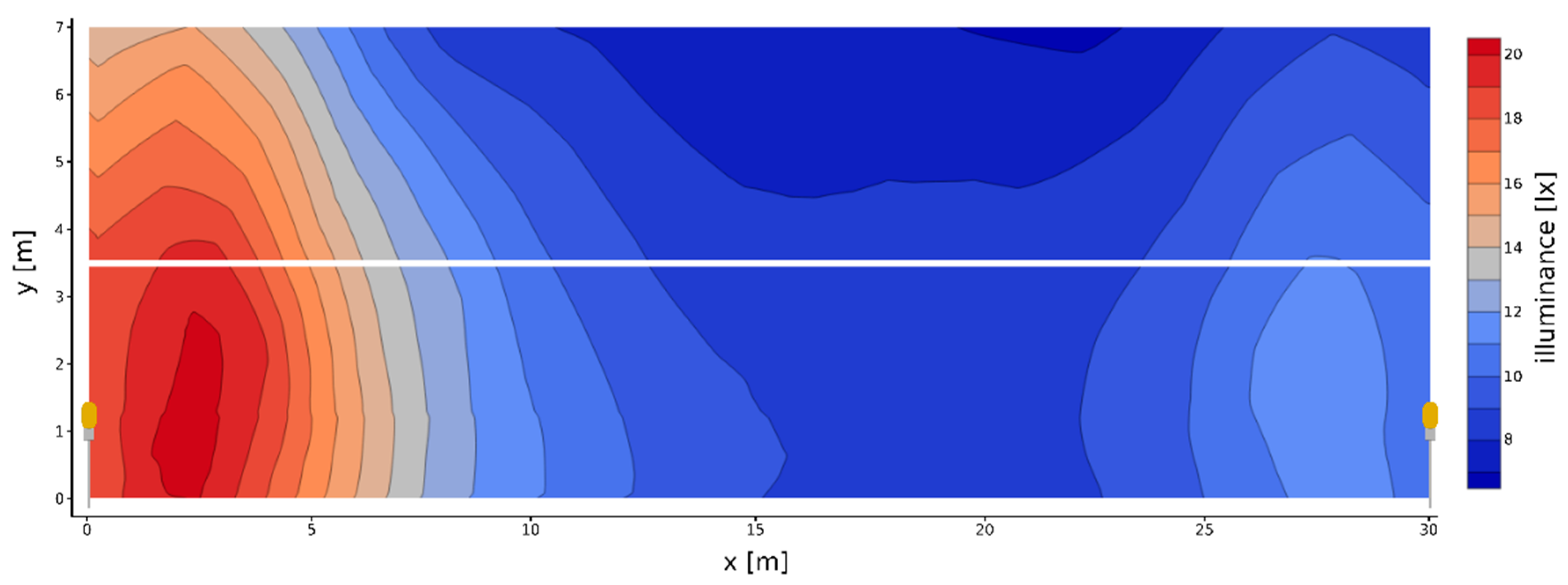
4.2 Road Street Lighting Results
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Abbreviations
| IEA | International Energy Agency |
| EU | European Union |
| GHG | Greenhouse Gases |
| LED | Light Emitting Diode |
| CFS | Complex Fenestration Systems |
| PSO/HJ | Particle Swarm Optimization / Hooke-Jeeves |
| IES | Illuminating Engineering Society |
| CIE | International Commission on Illumination |
| MLS | Mobile Laser Scanning |
| LiDAR | Laser Imaging Detection and Ranging |
| IMU | Inertial Measurement Units |
| GNSS | Global Navigation Satellite System |
| CV(RMSE) | coefficient of variation of the root mean squared error |
References
- Waide, P.; Tanishima, S.; International Energy Agency. Light’s Labour’s Lost. Policies for Energy-Efficient Lighting; OECD Publications: Paris, France, 2006. [Google Scholar]
- Nardelli, A.; Deuschle, E.; de Azevedo, L.D.; Pessoa, J.L.; Ghisi, E. Assessment of Light Emitting Diodes technology for general lighting: A critical review. Renew. Sustain. Energy Rev. 2017, 75, 368–379. [Google Scholar] [CrossRef]
- IEA. Available online: https://www.iea.org/about/ (accessed on 18 August 2018).
- EU 2030 Climate & Energy Framework. Available online: https://ec.europa.eu/clima/policies/strategies/2030_en (accessed on 18 August 2018).
- Thielemans, S.; Di Zenobio, D.; Touhafi, A.; Lataire, P.; Steenhaut, K. DC Grids for Smart LED-Based Lighting: The EDISON Solution. Energies 2017, 10, 1454. [Google Scholar] [CrossRef]
- Lighting Europe. Available online: https://www.lightingeurope.org/ (accessed on 18 August 2018).
- Montoya, F.G.; Peña-García, A.; Juaidi, A.; Manzano-Agugliaro, F. Indoor lighting techniques: An overview of evolution and new trends for energy saving. Energy Build. 2017, 140, 50–60. [Google Scholar] [CrossRef]
- Chang, M.H.; Das, D.; Varde, P.V.; Pecht, M. Light emitting diodes reliability review. Microelectron. Reliab. 2012, 52, 762–782. [Google Scholar] [CrossRef]
- Liu, H.; Zhou, Q.; Yang, J.; Jiang, T.; Liu, Z.; Li, J. Intelligent Luminance Control of Lighting Systems Based on Imaging Sensor Feedback. Sensors 2017, 17, 321. [Google Scholar] [CrossRef] [PubMed]
- Troncoso-Pastoriza, F.; Eguía-Oller, P.; Díaz-Redondo, R.P.; Granada-Álvarez, E. Generation of BIM data based on the automatic detection, identification and localization of lamps in buildings. Sustain. Cities Soc. 2018, 36, 59–70. [Google Scholar] [CrossRef]
- Soori, P.K.; Vishwas, M. Lighting control strategy for energy efficient office lighting system design. Energy Build. 2013, 66, 329–337. [Google Scholar] [CrossRef]
- Baloch, A.A.; Shaikh, P.H.; Shaikh, F.; Leghari, Z.H.; Mirjat, N.H.; Uqaili, M.A. Simulation tools application for artificial lighting in buildings. Renew. Sustain. Energy Rev. 2018, 82, 3007–3026. [Google Scholar] [CrossRef]
- Haq, M.A.u.; Hassan, M.Y.; Abdullah, H.; Rahman, H.A.; Abdullah, M.P.; Hussin, F.; Said, D.M. A review on lighting control technologies in commercial buildings, their performance and affecting factors. Renew. Sustain. Energy Rev. 2014, 33, 268–279. [Google Scholar] [CrossRef]
- Corte-Valiente, A.; Castillo-Sequera, J.; Castillo-Martinez, A.; Gómez-Pulido, J.; Gutierrez-Martinez, J. An Artificial Neural Network for Analyzing Overall Uniformity in Outdoor Lighting Systems. Energies 2017, 10, 175. [Google Scholar] [CrossRef]
- Castillo-Martinez, A.; Ramon Almagro, J.; Gutierrez-Escolar, A.; del Corte, A.; Castillo-Sequera, J.; Gómez-Pulido, J.; Gutiérrez-Martínez, J. Particle Swarm Optimization for Outdoor Lighting Design. Energies 2017, 10, 141. [Google Scholar] [CrossRef]
- Yoomak, S.; Jettanasen, C.; Ngaopitakkul, A.; Bunjongjit, S.; Leelajindakrairerk, M. Comparative study of lighting quality and power quality for LED and HPS luminaires in a roadway lighting system. Energy Build. 2018, 159, 542–557. [Google Scholar] [CrossRef]
- Gago-Calderón, A.; Hermoso-Orzáez, M.; De Andres-Diaz, J.; Redrado-Salvatierra, G. Evaluation of Uniformity and Glare Improvement with Low Energy Efficiency Losses in Street Lighting LED Luminaires Using Laser-Sintered Polyamide-Based Diffuse Covers. Energies 2018, 11, 816. [Google Scholar] [CrossRef]
- Fotios, S.; Qasem, H.; Cheal, C.; Uttley, J. A pilot study of road lighting, cycle lighting and obstacle detection. Light. Res. Technol. 2017, 49, 586–602. [Google Scholar] [CrossRef]
- Moretti, L.; Cantisani, G.; Di Mascio, P. Management of road tunnels: Construction, maintenance and lighting costs. Tunn. Undergr. Space Technol. 2016, 51, 84–89. [Google Scholar] [CrossRef]
- CIE 115:2010 Lighting of Roads for Motor and Pedestrian Traffic; International Commission on Illumination: Vienna, Austria, 2010.
- Shaikh, P.H.; Nor, N.B.M.; Nallagownden, P.; Elamvazuthi, I.; Ibrahim, T. Intelligent multi-objective control and management for smart energy efficient buildings. Int. J. Electr. Power Energy Syst. 2016, 74, 403–409. [Google Scholar] [CrossRef]
- Energyplus. EnergyPlus Engineering Reference; US Department of Energy: Washington, DC, USA, 2010. [Google Scholar]
- York, D.A.; Cappiello, C.C. DOE-2 Engineers Manual; Lawrence Berkeley Lab: Berkeley, CA, USA; Los Alamos National Lab: Los Alamos, NM, USA, 1981. [Google Scholar]
- Reinhart, C.F.; Walkenhorst, O. Validation of dynamic RADIANCE-based daylight simulations for a test office with external blinds. Energy Build. 2001, 33, 683–697. [Google Scholar] [CrossRef]
- Wetter, M. BuildOpt—A new building energy simulation program that is built on smooth models. Build. Environ. 2005, 40, 1085–1092. [Google Scholar] [CrossRef]
- Larson, G.W.; Shakespeare, R. Rendering with Radiance: The Art and Science of Lighting Visualization; Booksurge Llc: San Francisco, CA, USA, 2004. [Google Scholar]
- Bustamante, W.; Uribe, D.; Vera, S.; Molina, G. An integrated thermal and lighting simulation tool to support the design process of complex fenestration systems for office buildings. Appl. Energy 2017, 198, 36–48. [Google Scholar] [CrossRef]
- Vera, S.; Uribe, D.; Bustamante, W.; Molina, G. Optimization of a fixed exterior complex fenestration system considering visual comfort and energy performance criteria. Build. Environ. 2017, 113, 163–174. [Google Scholar] [CrossRef]
- Wetter, M. GenOpt®—A Generic Optimization Program. In Proceedings of the Seventh International IBPSA Conference, Rio de Janeiro, Brazil, 13–15 August 2001; pp. 601–608. [Google Scholar]
- CIE 30-1976 Calculation and Measurement of Luminance and Illuminance in Road Lighting; International Commission on Illumination: Vienna, Austria, 1976.
- CIE 140-2000 Road Lighting Calculations; International Commission on Illumination: Vienna, Austria, 2000.
- CIE 144:2001 Road Surface and Road Marking Reflection Characteristics; International Commission on Illumination: Vienna, Austria, 2001.
- Ward, G.J. The RADIANCE Lighting Simulation and Rendering System. In Proceedings of the 21st Annual Conference on Computer Graphics and Interactive Techniques (SIGGRAPH), Orlando, FL, USA, 24–29 July 1994; pp. 459–472. [Google Scholar]
- Wetter, M. GenOpt Generic Optimization Program, User Manual; Version 3.1.1; Simulation Research Group, Lawrence Berkeley National Laboratory: Berkeley, CA, USA, 2016. [Google Scholar]
- Ruiz, R.G.; Bandera, F.C. Validation of Calibrated Energy Models: Common Errors. Energies 2017, 10, 1587. [Google Scholar] [CrossRef]
- CIE 154:2003 The Maintenance of Outdoor Lighting Systems; International Commission on Illumination: Vienna, Austria, 2003.
- Puente, I.; González-Jorge, H.; Martínez-Sánchez, J.; Arias, P. Automatic detection of road tunnel luminaires using a mobile LiDAR system. Measurement 2014, 47, 569–575. [Google Scholar] [CrossRef]
- Puente, I.; González-Jorge, H.; Riveiro, B.; Arias, P. Accuracy verification of the Lynx Mobile Mapper system. Opt. Laser Technol. 2013, 45, 578–586. [Google Scholar] [CrossRef]
- Riveiro, B.; González-Jorge, H.; Martínez-Sánchez, J.; Díaz-Vilariño, L.; Arias, P. Automatic detection of zebra crossings from mobile LiDAR data. Opt. Laser Technol. 2015, 70, 63–70. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment ID | Luminaire Model | Lamp Model | Power [W] | Luminous Flux [lm] |
|---|---|---|---|---|
| E1 | VL-250/M | PHILIPS MASTER SON-T PIA Plus 150 W | 150 | 17700 |
| E2 | VL-250/A | PHILIPS MASTER SON-T PIA Plus 150 W | 150 | 17700 |
| E3 | VL-250/M | GE Lucalox LU150/100/XO/T/40 | 150 | 17600 |
| E4 | VL-250/A | GE Lucalox LU150/100/XO/T/40 | 150 | 17600 |
| Experiment ID | Design Value | Calibrated Value | CV(RMSE) Initial Simulation | CV(RMSE) Calibrated Simulation | Reduction |
|---|---|---|---|---|---|
| E1 | 0.67 | 0.816 | 21.75% | 7.23% | 66.76% |
| E2 | 0.67 | 0.871 | 27.50% | 8.27% | 69.93% |
| E3 | 0.67 | 0.775 | 17.11% | 7.14% | 58.27% |
| E4 | 0.67 | 0.824 | 22.61% | 7.59% | 66.43% |
| ID | Variable | Design Value | Calibrated Value |
|---|---|---|---|
| X1 | Maintenance Factor street Lamp 1 | 1 | 0.269 |
| X2 | Maintenance Factor street Lamp 2 | 1 | 0.485 |
| X3 | Maintenance Factor street Lamp 3 | 1 | 0.360 |
| X4 | Maintenance Factor street Lamp 4 | 1 | 0.362 |
| X5 | Maintenance Factor street Lamp 5 | 1 | 0.317 |
| X6 | Maintenance Factor street Lamp 6 | 1 | 0.509 |
| X7 | Maintenance Factor street Lamp 7 | 1 | 0.230 |
| X8 | Maintenance Factor street Lamp 8 | 1 | 0.364 |
| X9 | Maintenance Factor street Lamp 9 | 1 | 0.458 |
| X10 | Maintenance Factor street Lamp 10 | 1 | 0.615 |
| X11 | Maintenance Factor street Lamp 11 | 1 | 0.205 |
| X12 | Maintenance Factor street Lamp 12 | 1 | 0.235 |
| X13 | Delay illuminance sensor [m] | 0 | −51.00 |
| Statistical Error | Initial Simulation | Calibrated Simulation | Reduction |
|---|---|---|---|
| CV(RMSE) | 84.19% | 16.57% | 80.31% |
| Simulation results | CIE 115:2010 | ||
|---|---|---|---|
| 0.82 | 1 | ||
| 0.56 | 0.4 | ||
| 0.76 | 0.6 | ||
| 6 | 15 | ||
| 0.73 | 0.5 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ogando-Martínez, A.; López-Gómez, J.; Febrero-Garrido, L. Maintenance Factor Identification in Outdoor Lighting Installations Using Simulation and Optimization Techniques. Energies 2018, 11, 2169. https://doi.org/10.3390/en11082169
Ogando-Martínez A, López-Gómez J, Febrero-Garrido L. Maintenance Factor Identification in Outdoor Lighting Installations Using Simulation and Optimization Techniques. Energies. 2018; 11(8):2169. https://doi.org/10.3390/en11082169
Chicago/Turabian StyleOgando-Martínez, Ana, Javier López-Gómez, and Lara Febrero-Garrido. 2018. "Maintenance Factor Identification in Outdoor Lighting Installations Using Simulation and Optimization Techniques" Energies 11, no. 8: 2169. https://doi.org/10.3390/en11082169
APA StyleOgando-Martínez, A., López-Gómez, J., & Febrero-Garrido, L. (2018). Maintenance Factor Identification in Outdoor Lighting Installations Using Simulation and Optimization Techniques. Energies, 11(8), 2169. https://doi.org/10.3390/en11082169