Adaptive Consensus Algorithm for Distributed Heat-Electricity Energy Management of an Islanded Microgrid

Abstract
:1. Introduction
- Multi-energy dispatch: The above ED only considers the electricity energy dispatch, and did not consider the optimal dispatch of other energies, e.g., the heat energy dispatch;
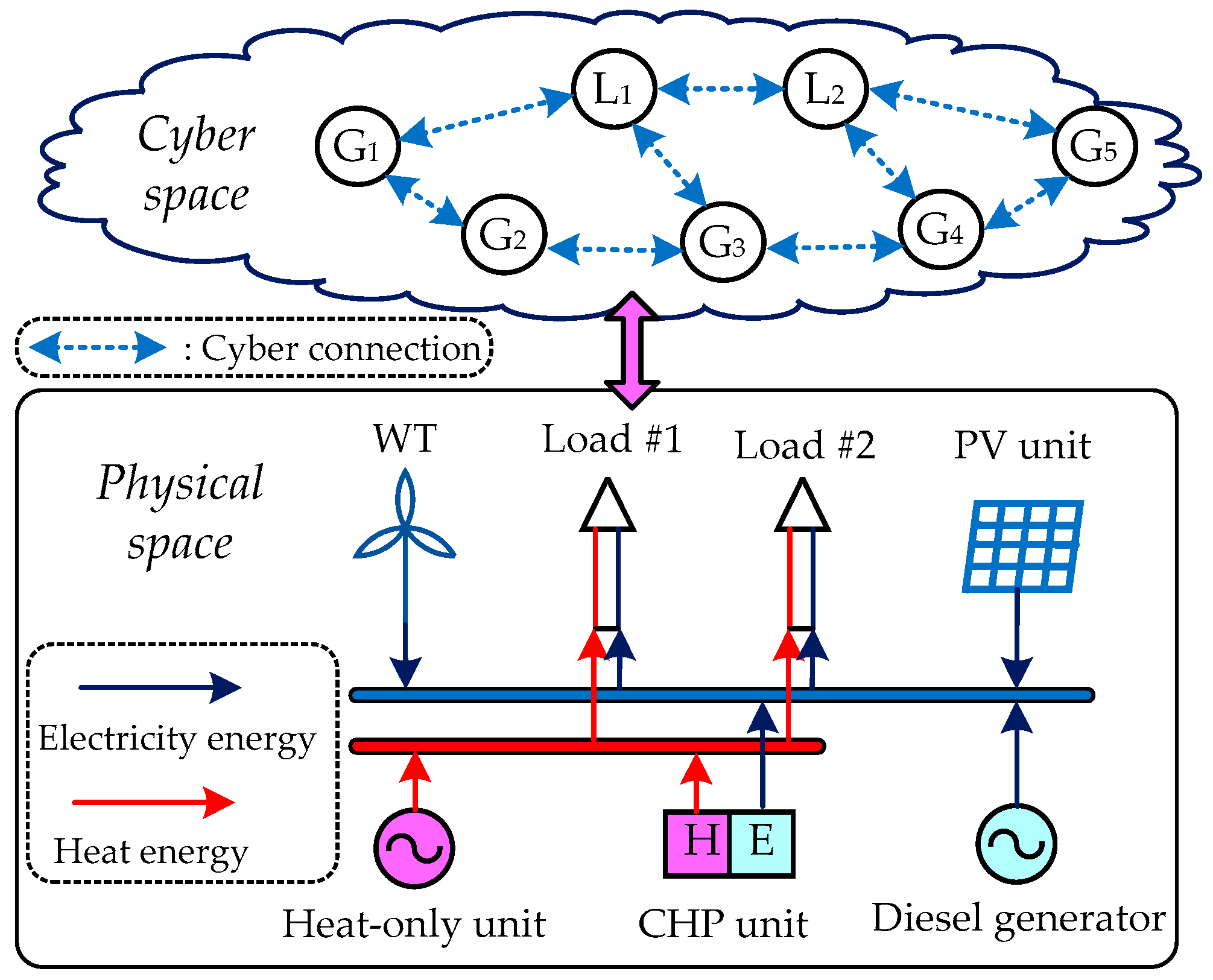
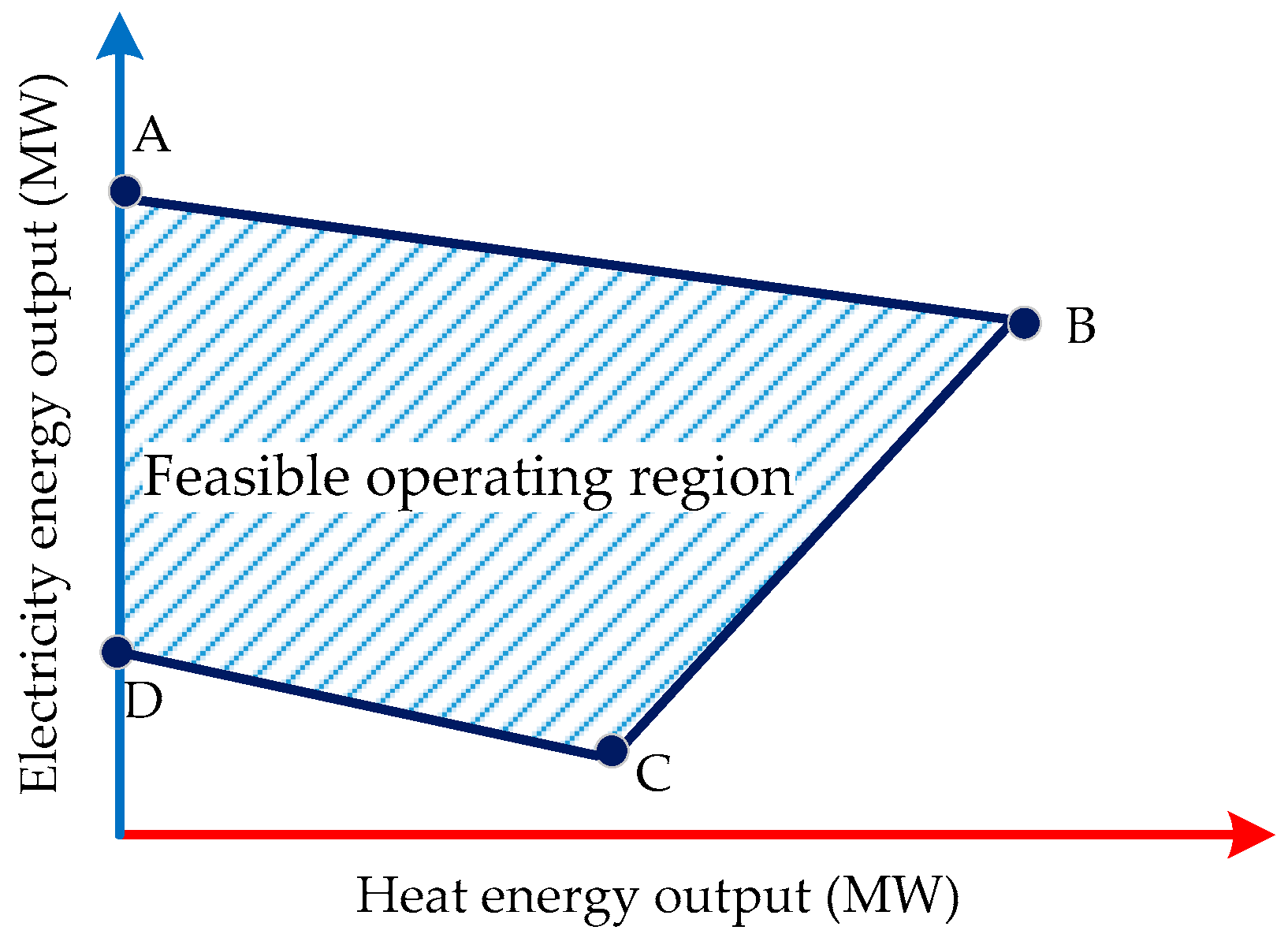
- Tight coupling features among various energies: As the participation of a combined heat and power (CHP) unit, the electricity and heat energy outputs are tightly coupled because of the feasible operation region constraint, which needs to be carefully designed in the distributed ED.
2. Mathematical Model of Distributed HEEM
2.1. Objective Function
2.2. Constraints
2.2.1. Energy Balance Constraints
2.2.2. Lower and Upper Capability Limits
2.3. Feature Analysis
3. Design of ACA for Distributed HEEM
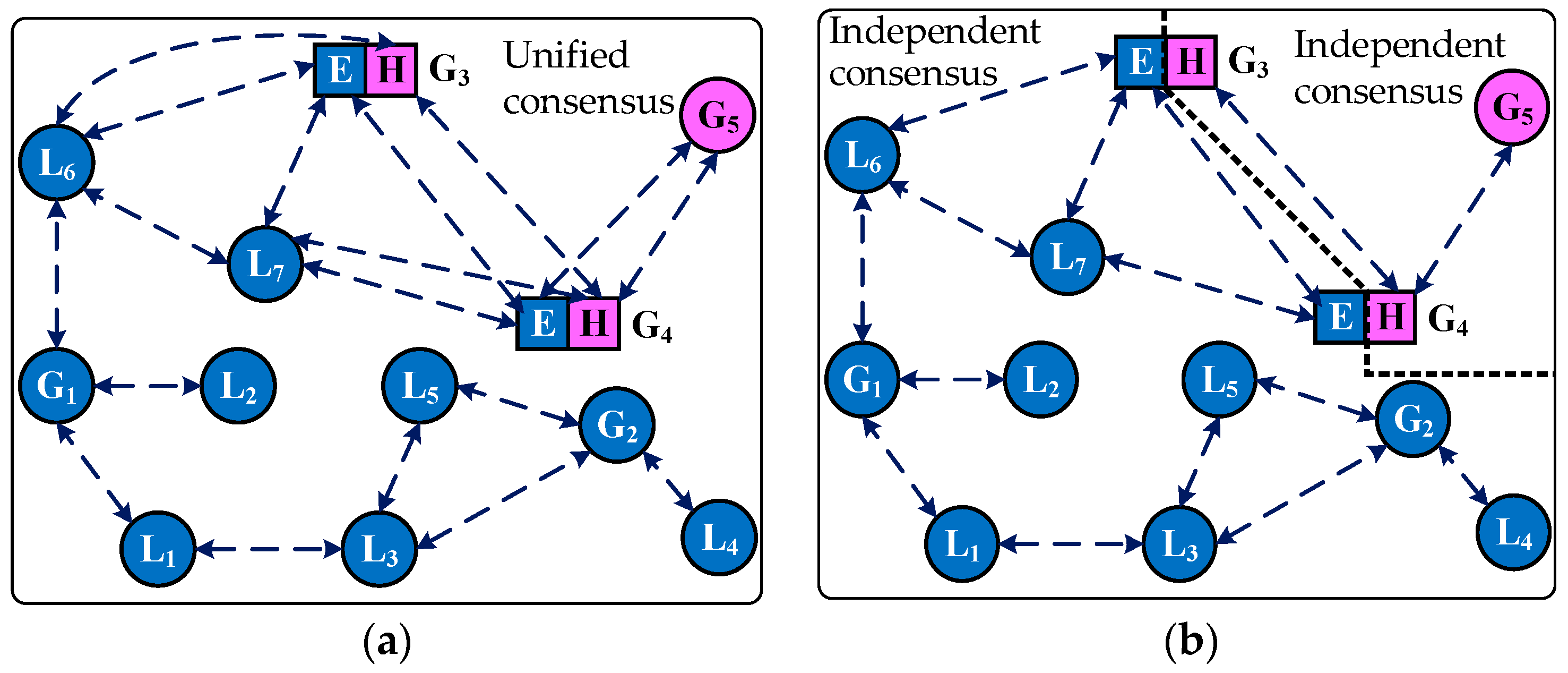
3.1. Graph Theory of Interaction Network
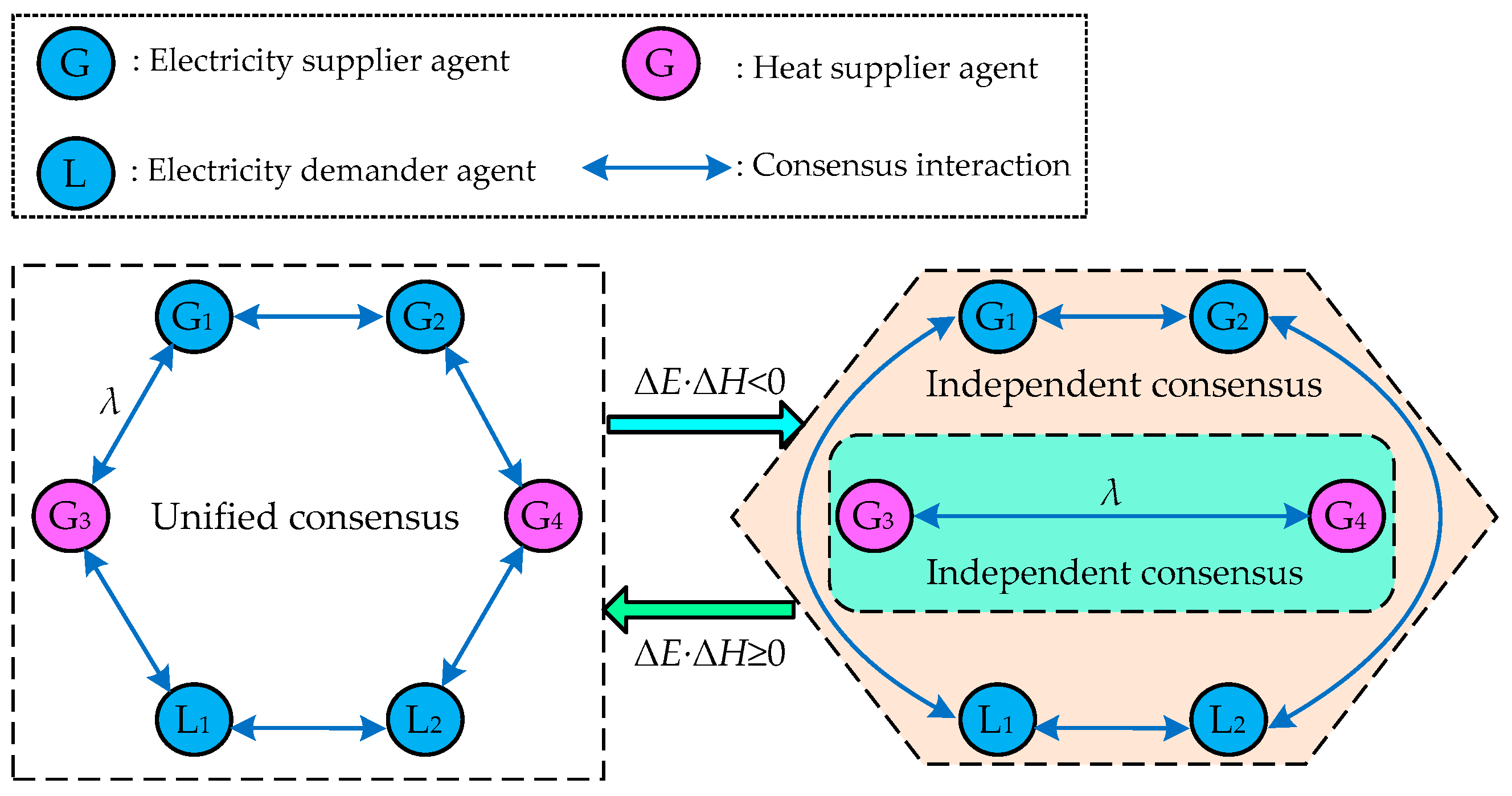
3.2. Adaptive Consensus Algorithm
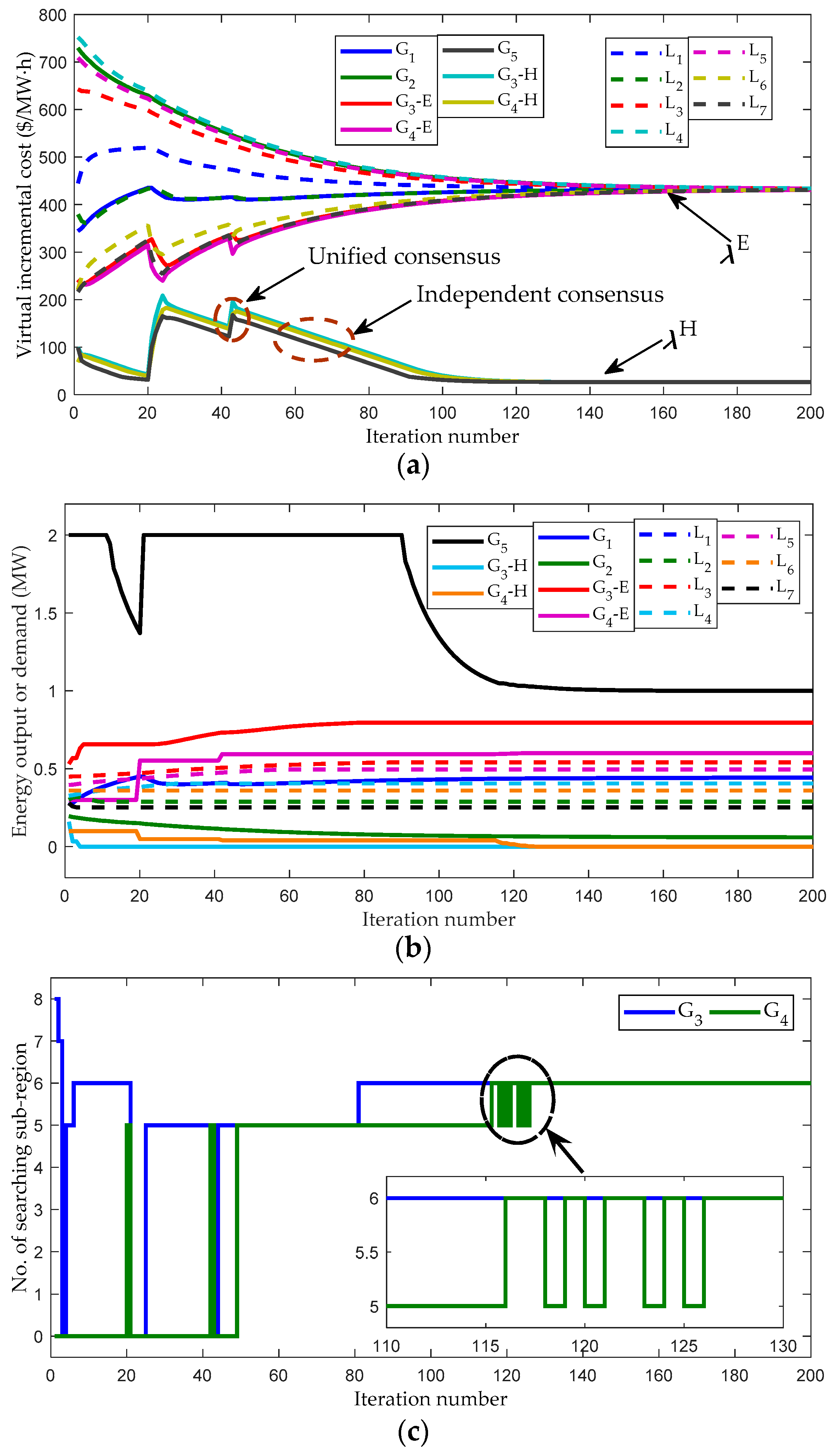
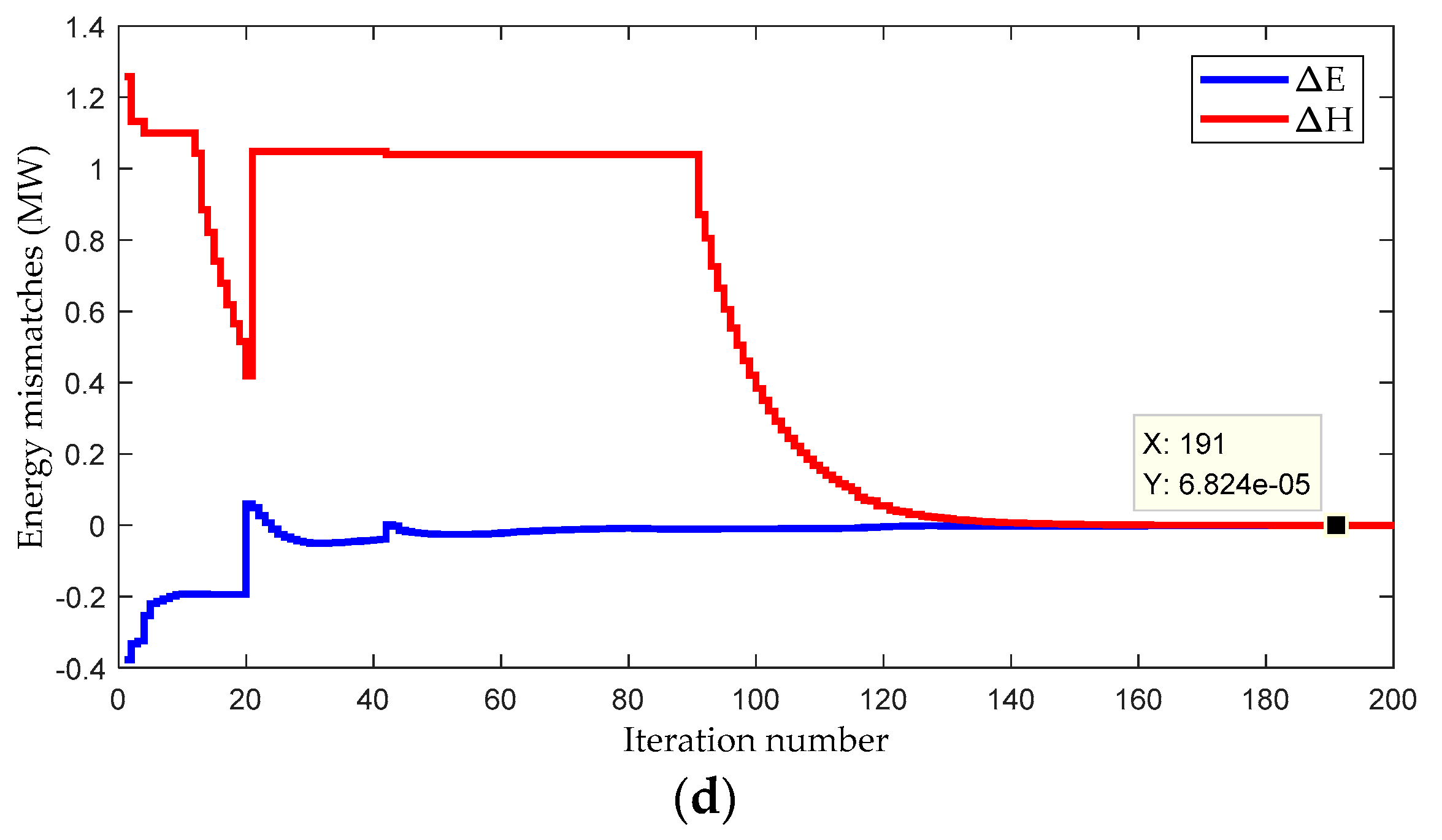
- Unified consensus: If the signs of ΔE and ΔH are consistent, i.e., ΔEΔH ≥ 0, then all the agents can update their incremental cost state in a unified interaction network, as
- Independent consensus: If the signs of ΔE and ΔH are inconsistent, i.e., ΔE·ΔH < 0, then the electricity agents and heat agents need to be separated to update their incremental cost state in two independent interaction networks, as:where ΩE and ΩH represent the sets of electricity agents and heat agents, respectively; dijE is the (i, j) entry of the row stochastic matrix of the interaction network among the electricity agents; dijH is the (i, j) entry of the row stochastic matrix of the interaction network among the heat agents; and μ denotes the adjustment factor of energy mismatch, μ > 0.
3.3. Constraints Handling
- Diesel generator: The electrical energy output can be modified as follows:where PGic is the consensus value of the electrical energy output of the ith energy supplier.
- Heat-only unit: The heat energy output can be modified as follows:where HGic is the consensus value of the heat energy output of the ith energy supplier.
- Energy consumer: The electricity energy curtailment can be modified as follows:where ΔPDic is the consensus value of the electrical energy curtailment of the ith energy consumer.
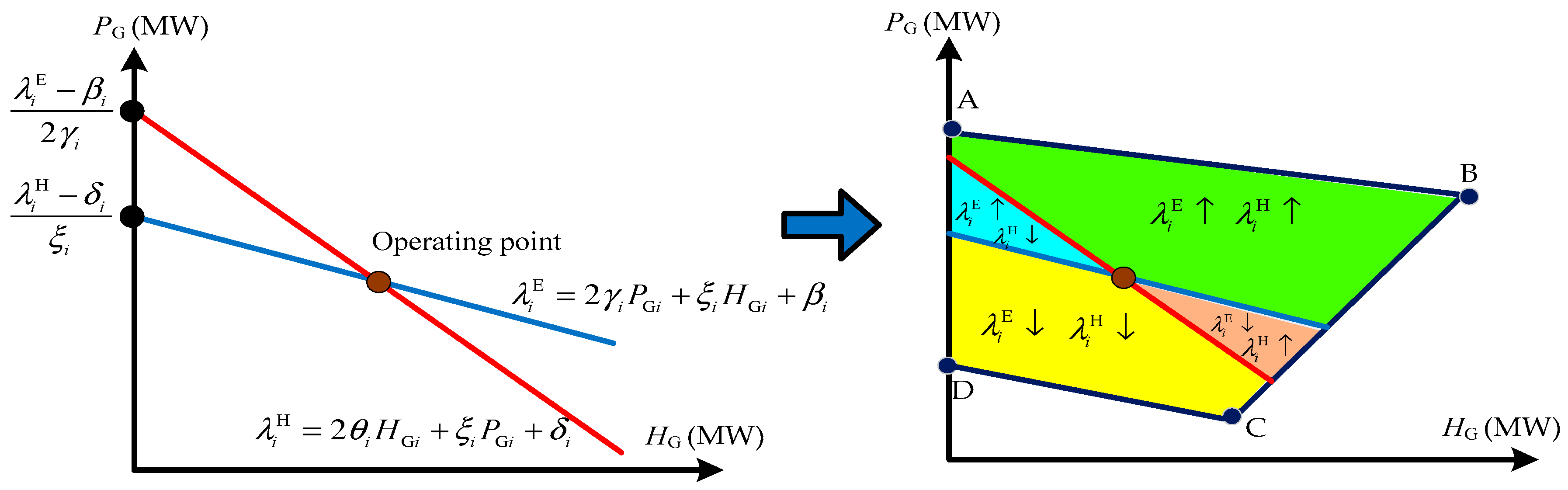
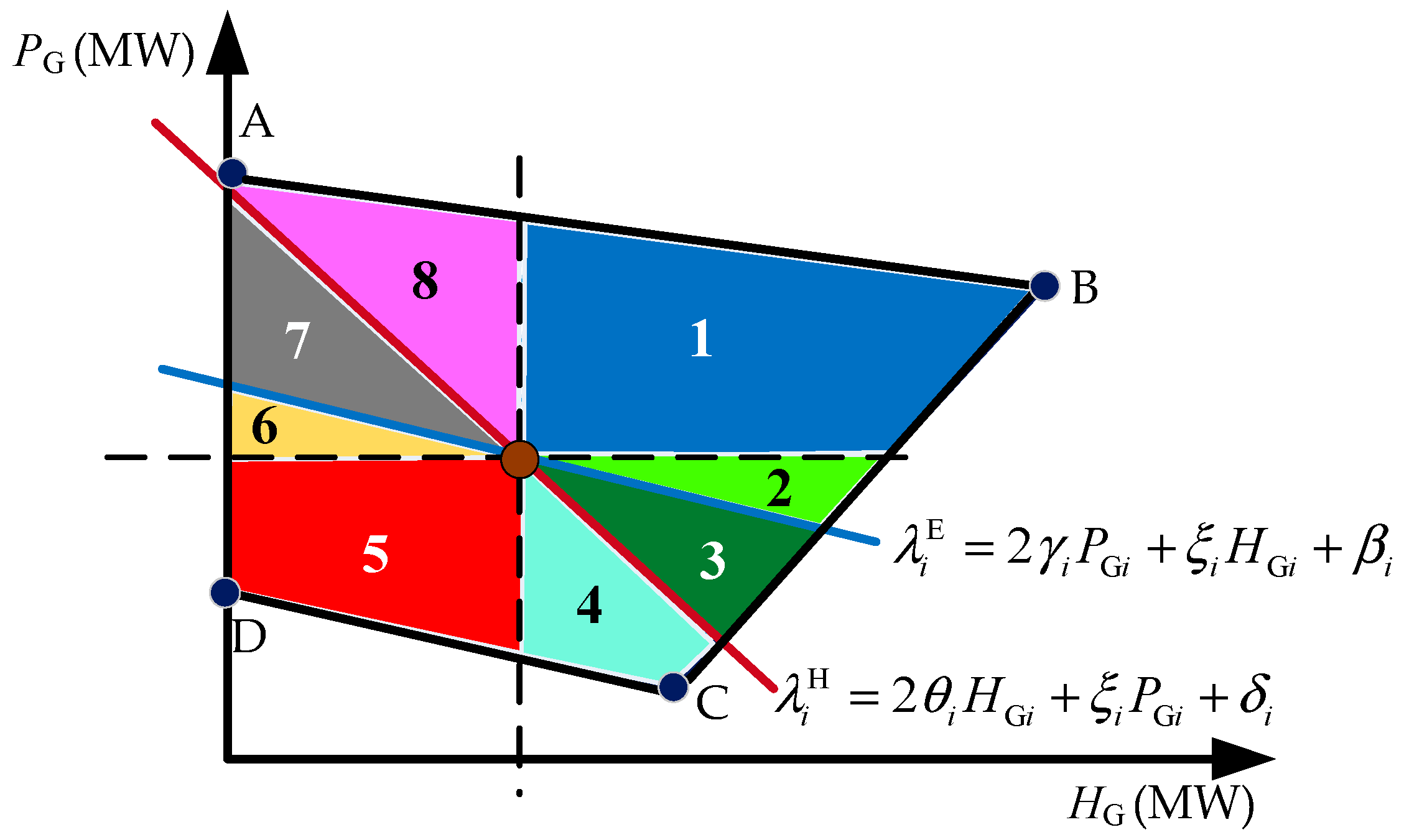
- CHP unit: Since the electrical and heat energy outputs are highly coupled, the incremental cost should be controlled to meet the energy balance constraints and the feasible operating region constraint. Hence, the feasible operating region is decomposed into eight searching sub-regions, See Figure 6, allowing the CHP unit to adjust its energy outputs based on the current energy mismatches and the consensus value of incremental costs, as given in Table 1.
3.4. Execution Procedure
| Algorithm 1. ACA for distributed HEEM. | |
| 1: | Initial the algorithm parameters; |
| 2: | Design the interaction network among different agents; |
| 3: | Input the operating data of the current optimization task; |
| 4: | Calculate the electricity and heat energy mismatches by Equations (4) and (5); |
| 5: | While |ΔE| > τ or |ΔH| > τ |
| 6: | If ΔE·ΔH ≥ 0 then |
| 7: | Update the virtual incremental cost of each agent by unified consensus Equation (15); |
| 8: | Else |
| 9: | Update the virtual incremental cost of each agent by independent consensus Equation (16); |
| 10: | End If |
| 11: | Calculate the electricity energy output of each diesel generator by Equations (17) and (18); |
| 12: | Calculate the heat energy output of each heat-only unit by Equations (19) and (20); |
| 13: | Calculate the electricity energy curtailment of each energy consumer by Equations (21) and (22); |
| 14: | Modify the energy outputs of each CHP unit based on the adjusting rule in Table 1 and the eight searching sub-regions in Figure 6; |
| 15: | Calculate the electricity and heat energy mismatches by Equations (4) and (5); |
| 16: | Set k: = k + 1; |
| 17: | End While |
| Output the optimal energy dispatch strategy of each agent. | |
4. Case Studies
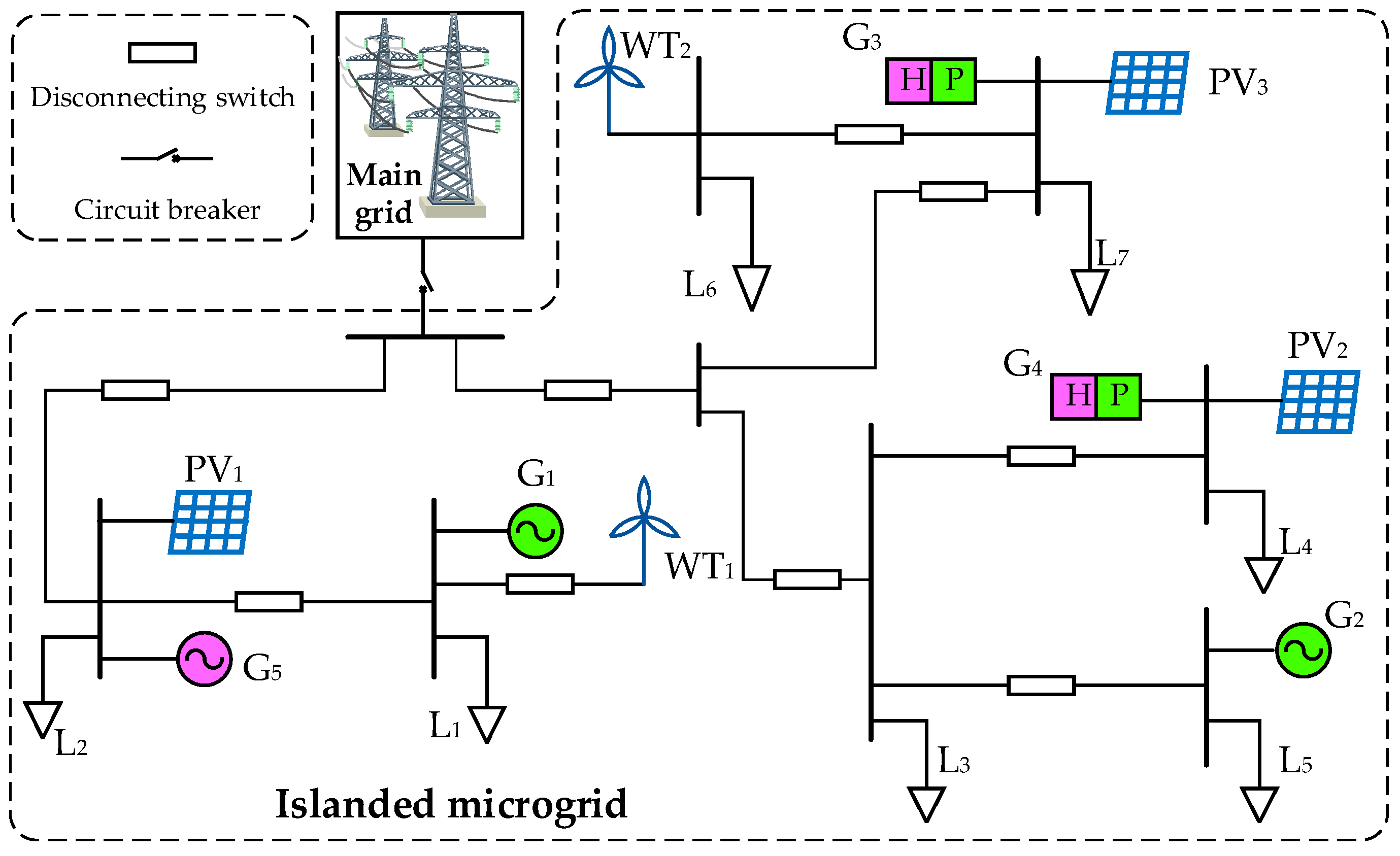
4.1. Simulation Model
4.2. Study of Convergence
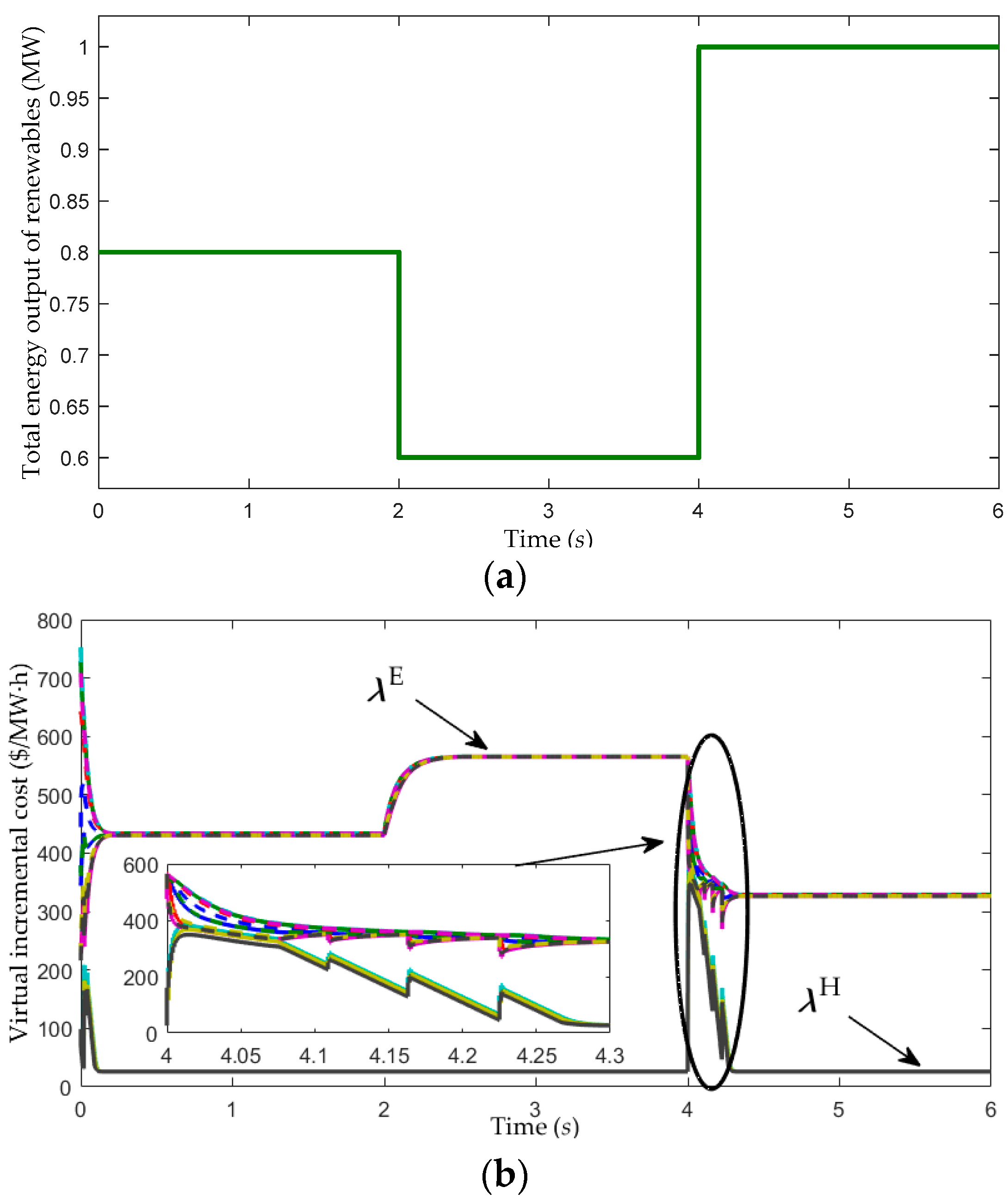
4.3. Comparative Results and Discussions
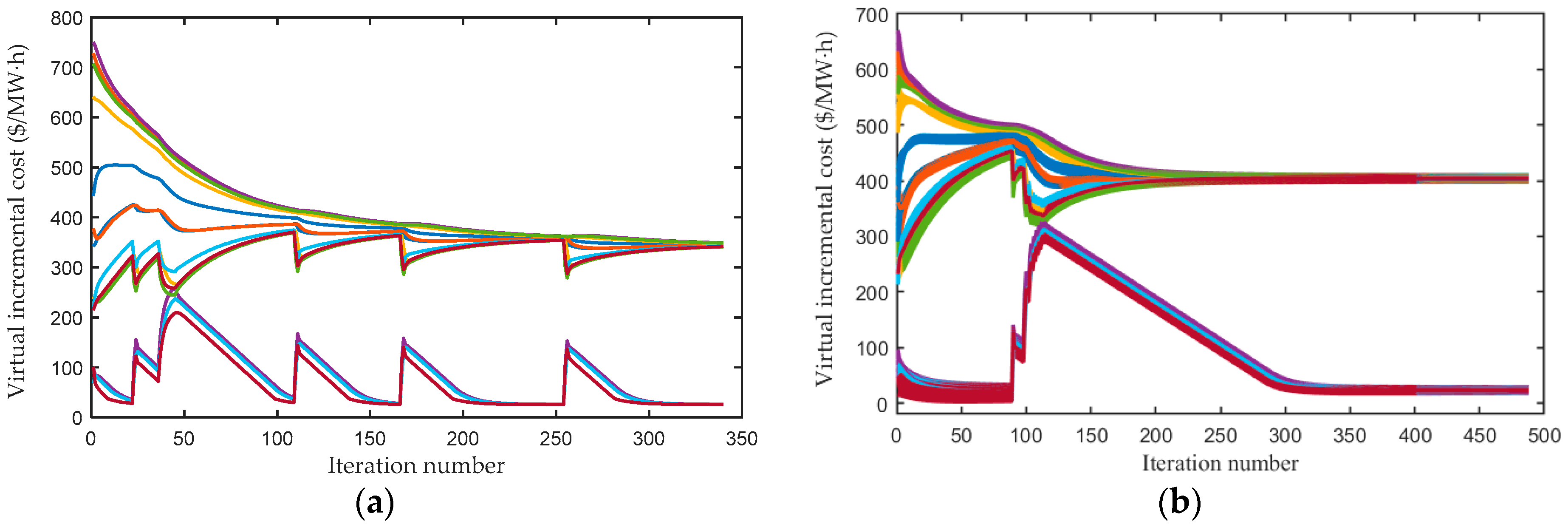
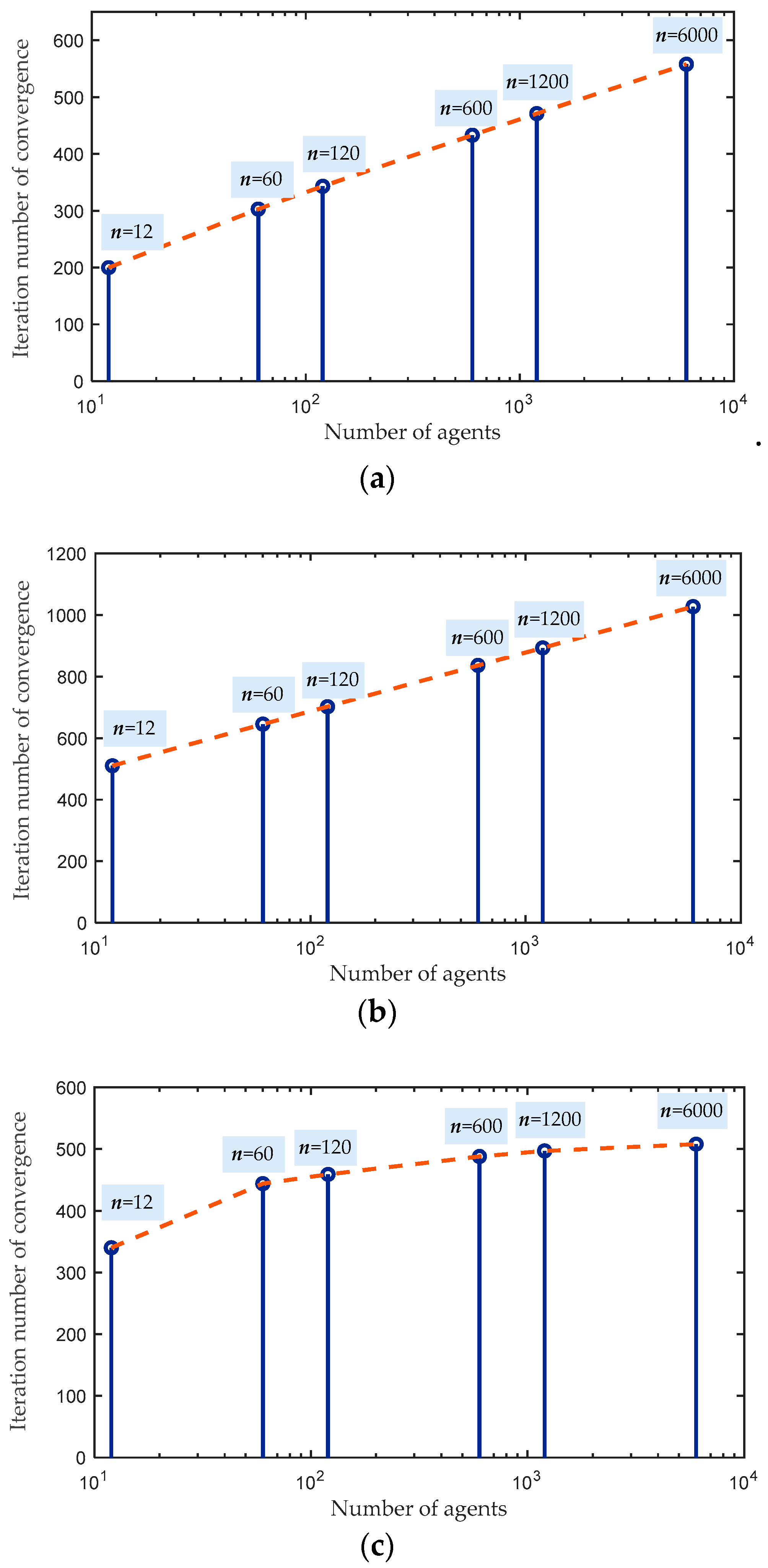
4.4. Scalability Test of ACA
5. Conclusions
- The ACA based distributed HEEM can effectively address the multi-energy dispatch of an islanded microgrid in a simple distributed manner, while various constraints (e.g., the tight coupling features among various energies) can be completely satisfied.
- The proposed eight searching sub-regions effectively make the CHP unit adaptively adjust its energy outputs to simultaneously meet the consensus requirement and the heat-electricity energy balance constraints.
- Through the switch between unified consensus and independent consensus, ACA gradually converges to the optimal solution of the whole system according to the dynamic energy mismatches.
- ACA can not only obtain a high-quality optimum of distributed HEEM, but also guarantee a short execution time. Hence, it can be generalized to be applied to other real-time distributed optimization issues of integrated energy systems.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Alsaidan, I.; Alannazi, A.; Gao, W.; Wu, H.; Khodaei, A. State-of-the-art in microgrid-integrated distributed energy storage sizing. Energies 2017, 10, 1421. [Google Scholar] [CrossRef]
- Kim, H.-M.; Lim, Y.; Kinoshita, T. An intelligent multiagent system for autonomous microgrid operation. Energies 2012, 5, 3347–3362. [Google Scholar] [CrossRef]
- Gao, H.; Chen, Y.; Xu, Y.; Liu, C.-C. Dynamic load shedding for islanded microgrid with limited generation resources. IET Renew. Power Gener. 2016, 10, 2953–2961. [Google Scholar] [CrossRef]
- Lin, W.-M.; Tu, C.-S.; Tsai, M.-T. Energy management strategy for microgrid by using enhanced bee colony optimization. Energies 2016, 9, 5. [Google Scholar] [CrossRef]
- Maghsoodlou, F.; Masiello, R.; Ray, T. Energy management systems. IEEE Power Energy Mag. 2004, 2, 49–57. [Google Scholar] [CrossRef]
- Loia, V.; Vaccaro, A. Decentralized economic dispatch in smart grids by self-organizing dynamic agents. IEEE Trans. Syst. Man Cybern. Syst. 2014, 44, 397–408. [Google Scholar] [CrossRef]
- Zheng, W.; Wu, W.; Zhang, B.; Sun, H.; Liu, Y. A fully distributed reactive power optimization and control method for active distribution networks. IEEE Trans. Smart Grid 2016, 7, 1021–1033. [Google Scholar] [CrossRef]
- Amin, S.M. Smart grid security, privacy, and resilient architectures: Opportunities and challenges. In Proceedings of the 2012 IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012; pp. 1–2. [Google Scholar]
- Hu, J.; Chen, M.Z.Q.; Cao, J.; Guerrero, J.M. Coordinated active power dispatch for a microgrid via distributed lambda iteration. IEEE Trans. Emerg. Sel. Top. Circuits Syst. 2017, 7, 250–261. [Google Scholar] [CrossRef]
- Mojica-Nava, E.; Barreto, C.; Quijano, N. Population games methods for distributed control of microgrids. IEEE Trans. Smart Grid 2015, 6, 2586–2595. [Google Scholar] [CrossRef]
- Yang, Z.; Wu, R.; Yang, J.; Long, K.; You, P. Economical operation of microgrid with various devices via distributed optimization. IEEE Trans. Smart Grid 2016, 7, 857–867. [Google Scholar] [CrossRef]
- Xu, Y.; Li, Z. Distributed optimal resource management based on the consensus algorithm in a microgrid. IEEE Trans. Ind. Electron. 2015, 62, 2584–2592. [Google Scholar] [CrossRef]
- Hug, G.; Kar, S.; Wu, C. Consensus + innovations approach for distributed multiagent coordination in a microgrid. IEEE Trans. Smart Grid 2015, 6, 1893–1903. [Google Scholar] [CrossRef]
- Han, R.; Meng, L.; Ferrari-Trecate, G.; Coelho, E.A.A.; Vasquez, J.C.; Guerrero, J.M. Containment and consensus-based distributed coordination control to achieve bounded voltage and precise reactive power sharing in islanded AC microgrids. IEEE Trans. Ind. Appl. 2017, 53, 5187–5199. [Google Scholar] [CrossRef]
- Chen, G.; Zhao, Z. Delay effect on consensus–based distributed economic dispatch algorithm in microgrid. IEEE Trans. Power Syst. 2018, 33, 602–612. [Google Scholar] [CrossRef]
- Zhao, T.; Ding, Z. Distributed agent consensus-based optimal resource management for microgrid. IEEE Trans. Sustain. Energy 2018, 9, 443–452. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, H.; Yu, T.; Yang, B.; Xu, M. Robust collaborative consensus algorithm for decentralized economic dispatch with a practical communication network. Electr. Power Syst. Res. 2016, 140, 597–610. [Google Scholar] [CrossRef]
- Liu, N.; Wang, J.; Wang, L. Distributed energy management for interconnected operation of combined heat and power-based microgrids with demand response. J. Mod. Power Syst. Clean Energy 2017, 5, 478–488. [Google Scholar] [CrossRef] [Green Version]
- Zhang, G.; Cao, Y.; Cao, Y.; Li, D.; Wang, L. Optimal energy management for microgrids with combined heat and power (CHP) generation, energy storage, and renewable energy sources. Energies 2017, 10, 1288. [Google Scholar] [CrossRef]
- Zhang, Z.; Chow, M.-Y. Convergence analysis of the incremental cost consensus algorithm under different communication network topologies in a smart grid. IEEE Trans. Power Syst. 2012, 27, 1761–1768. [Google Scholar] [CrossRef]
- Gibbons, A. Algorithmic Graph Theor; Cambridge University Press: Cambridge, UK, 1985. [Google Scholar]
- Walters, D.C.; Sheble, G.B. Genetic algorithm solution of economic dispatch with value point loading. IEEE Trans. Power Syst. 1993, 8, 1325–1332. [Google Scholar] [CrossRef]
- Duvvuru, N.; Swarup, K.S. A hybrid interior point assisted differential evolution algorithm for economic dispatch. IEEE Trans. Power Syst. 2011, 26, 541–549. [Google Scholar] [CrossRef]
- Erdeljan, A.; Capko, D.; Vukmirovic, S.; Bojanic, D.; Congradac, V. Distributed PSO algorithm for data model partitioning in power distribution systems. J. Appl. Res. Technol. 2014, 12, 947–957. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ΔE > 0 | ΔH > 0 | λiE[k] > λiAE[k − 1] | λiH[k] > λiAH[k−1] | (PGi, HGi) |
|---|---|---|---|---|
| True | True | True | True | No adjustment |
| True | True | True | False | No adjustment |
| True | True | False | True | No adjustment |
| True | True | False | False | Sub-region #5 |
| True | False | True | True | Sub-region #2 |
| True | False | True | False | No adjustment |
| True | False | False | True | Sub-region #3 |
| True | False | False | False | Sub-region #4 |
| False | True | True | True | Sub-region #8 |
| False | True | True | False | Sub-region #7 |
| False | True | False | True | No adjustment |
| False | True | False | False | Sub-region #6 |
| False | False | True | True | Sub-region #1 |
| False | False | True | False | No adjustment |
| False | False | False | True | No adjustment |
| False | False | False | False | No adjustment |
| Type | No. | αi | βi | γi | δi | θi | ζi |
|---|---|---|---|---|---|---|---|
| Diesel generator | G1 | 10.193 | 210.36 | 250.2 | - | - | - |
| G2 | 2.305 | 301.4 | 1100 | - | - | - | |
| Heat-only unit | G3 | 33 | 12.3 | 6.9 | - | - | - |
| CHP unit | G4 | 339.5 | 185.7 | 44.2 | 53.8 | 38.4 | 40 |
| G5 | 100 | 288 | 34.5 | 21.6 | 21.6 | 8.8 | |
| Energy consumer | L1 | 1 | −0.002 | - | - | - | - |
| L2 | 1 | −0.002 | - | - | - | - | |
| L3 | 1 | −0.001 | - | - | - | - | |
| L4 | 1 | −0.001 | - | - | - | - | |
| L5 | 1 | −0.001 | - | - | - | - | |
| L6 | 1 | −0.0035 | - | - | - | - | |
| L7 | 1 | −0.0035 | - | - | - | - |
| No. | Energy Type | Dispatch Strategy (MW) | ||||
|---|---|---|---|---|---|---|
| GA | IPM | DPSO | DDO | ACA | ||
| G1 | Electrical | 0.4013 | 0.3134 | 0.4150 | 0.3178 | 0.4427 |
| G2 | Electrical | 0.1617 | 0.0492 | 0.2000 | 0.0500 | 0.0602 |
| G3 | Electrical | 0.8448 | 0.9963 | 1.0000 | 0.9923 | 0.7962 |
| Heat | 0.3182 | 0.0056 | 0.0000 | 0.0069 | 0.0000 | |
| G4 | Electrical | 0.4588 | 0.5946 | 0.6000 | 0.5941 | 0.5999 |
| Heat | 0.2952 | 0.0326 | 0.0000 | 0.0354 | 0.0000 | |
| G5 | Heat | 0.3858 | 0.9619 | 1.0000 | 0.9577 | 1.0000 |
| L1 | Electrical | 0.3938 | 0.3771 | 0.4500 | 0.3744 | 0.3600 |
| L2 | Electrical | 0.3220 | 0.3310 | 0.3600 | 0.3353 | 0.2880 |
| L3 | Electrical | 0.4736 | 0.5359 | 0.5400 | 0.5360 | 0.5400 |
| L4 | Electrical | 0.3624 | 0.4030 | 0.4050 | 0.4034 | 0.4050 |
| L5 | Electrical | 0.4395 | 0.4919 | 0.4950 | 0.4921 | 0.4950 |
| L6 | Electrical | 0.3922 | 0.3614 | 0.4500 | 0.3605 | 0.3600 |
| L7 | Electrical | 0.2840 | 0.2531 | 0.3150 | 0.2524 | 0.2520 |
| HD | Heat | 1 | 1 | 1 | 1 | 1 |
| PV | Electrical | 0.3 | 0.3 | 0.3 | 0.3 | 0.3 |
| WT | Electrical | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 |
| Total operating cost ($/h) | 1201.48 | 1091.38 | 1153.99 | 1091.57 | 1113.91 | |
| Scenario No. | Algorithm | Type | Execution Time (s) | Total Operating Cost ($/h) | ||
|---|---|---|---|---|---|---|
| Max | Avg | Min | ||||
| #1 | GA | Centr. | 9.45 | 1250.29 | 1207.94 | 1148.17 |
| IPM | Centr. | 0.32 | 1091.38 | 1091.38 | 1091.38 | |
| DPSO | Distr. | 4.17 | 1153.99 | 1151.90 | 1124.50 | |
| DDO | Distr. | 1.27 | 1091.57 | 1091.57 | 1091.57 | |
| ACA | Distr. | 0.20 | 1113.91 | 1113.91 | 1113.91 | |
| #2 | GA | Centr. | 9.16 | 1334.22 | 1299.12 | 1251.35 |
| IPM | Centr. | 0.56 | 1168.46 | 1168.46 | 1168.46 | |
| DPSO | Distr. | 4.14 | 1228.44 | 1228.15 | 1226.12 | |
| DDO | Distr. | 1.49 | 1198.32 | 1198.32 | 1198.32 | |
| ACA | Distr. | 0.51 | 1212.54 | 1212.54 | 1212.54 | |
| #3 | GA | Centr. | 9.36 | 1178.54 | 1135.87 | 1083.35 |
| IPM | Centr. | 0.26 | 1020.67 | 1020.67 | 1020.67 | |
| DPSO | Distr. | 4.42 | 1080.39 | 1078.45 | 1041.42 | |
| DDO | Distr. | 1.24 | 1020.77 | 1020.77 | 1020.77 | |
| ACA | Distr. | 0.34 | 1024.73 | 1024.73 | 1024.73 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, X.; Zhang, X.; Jiang, T. Adaptive Consensus Algorithm for Distributed Heat-Electricity Energy Management of an Islanded Microgrid. Energies 2018, 11, 2236. https://doi.org/10.3390/en11092236
Dong X, Zhang X, Jiang T. Adaptive Consensus Algorithm for Distributed Heat-Electricity Energy Management of an Islanded Microgrid. Energies. 2018; 11(9):2236. https://doi.org/10.3390/en11092236
Chicago/Turabian StyleDong, Xiaofeng, Xiaoshun Zhang, and Tong Jiang. 2018. "Adaptive Consensus Algorithm for Distributed Heat-Electricity Energy Management of an Islanded Microgrid" Energies 11, no. 9: 2236. https://doi.org/10.3390/en11092236
APA StyleDong, X., Zhang, X., & Jiang, T. (2018). Adaptive Consensus Algorithm for Distributed Heat-Electricity Energy Management of an Islanded Microgrid. Energies, 11(9), 2236. https://doi.org/10.3390/en11092236