Applications of a Strong Track Filter and LDA for On-Line Identification of a Switched Reluctance Machine Stator Inter-Turn Shorted-Circuit Fault

Abstract
:1. Introduction
2. Model of Switched Reluctance Machine (SRM) and the Failure Mechanism Analysis
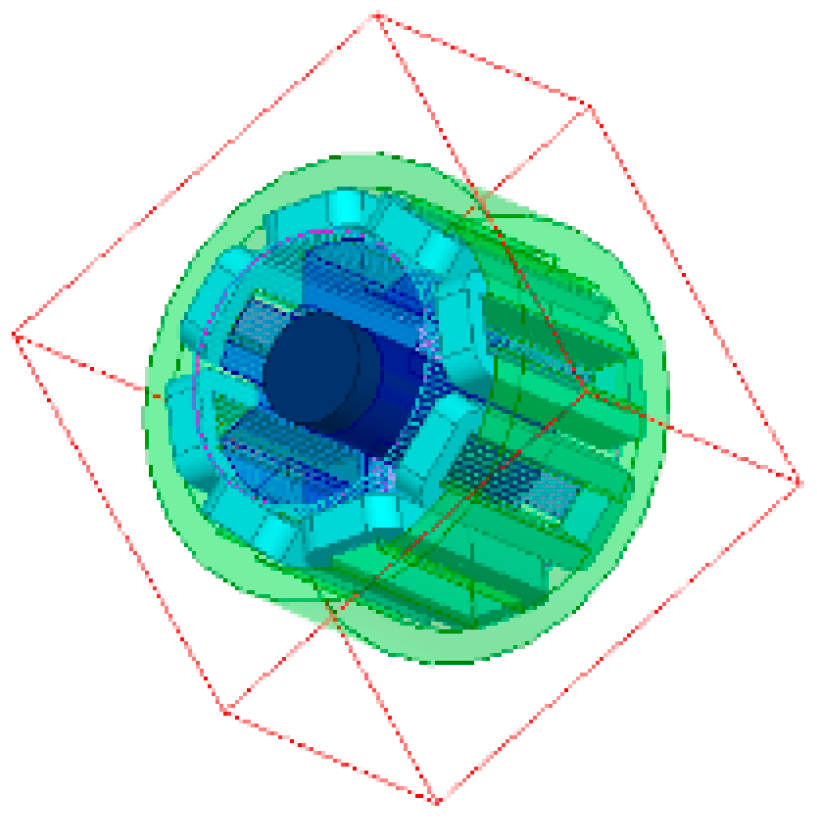
2.1. Model of the Healthy SRM
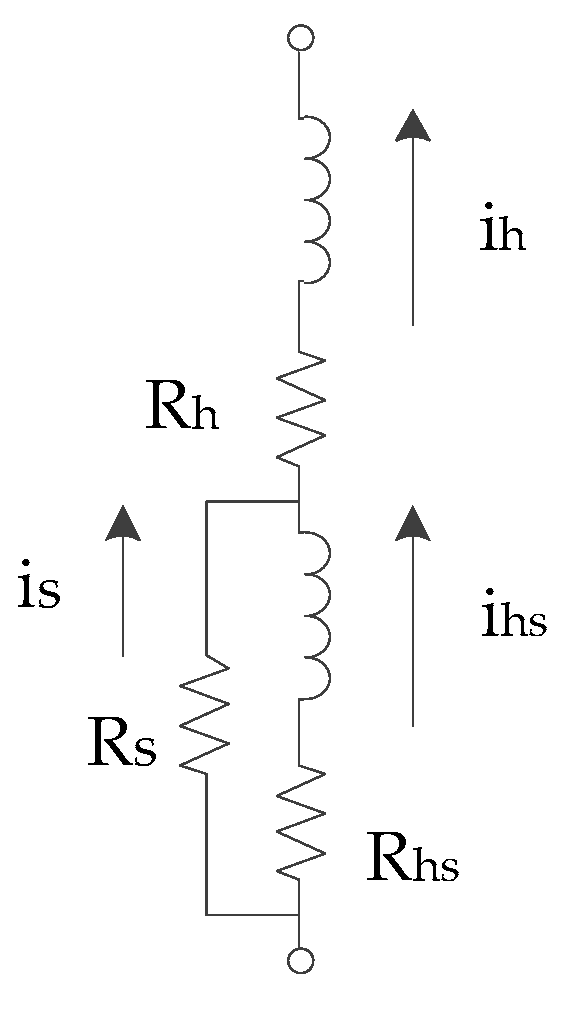
2.2. The Failure Mechanism Analysis
3. The STF Procedure
- Step 1:
- Determoning the state estimation variable of the fault diagnosis system and selecting the initial value , . Simultaneously, the weakening factor β and the forgetting factor ρ are respectively given appropriately based on the training experience.
- Step 2:
- The state variable should be calculated by Equation (44), then the residual matrix Γ(k + 1) is also obtained by Equation (45).
- Step 3:
- Calculating the fading factor λ(k+1) based on Equations (49)–(53).
- Step 4:
- The matrix P(k + 1|k) and K(k|k) can be obtained by Equations (46) and (47) respectively. Finally, the estimated value can be obtained by Equation (54).
- Step 5:
- Comparing the estimated value and the target value x0. The residual obtained from the comparison would be sent to the comparator of diagnostic system.
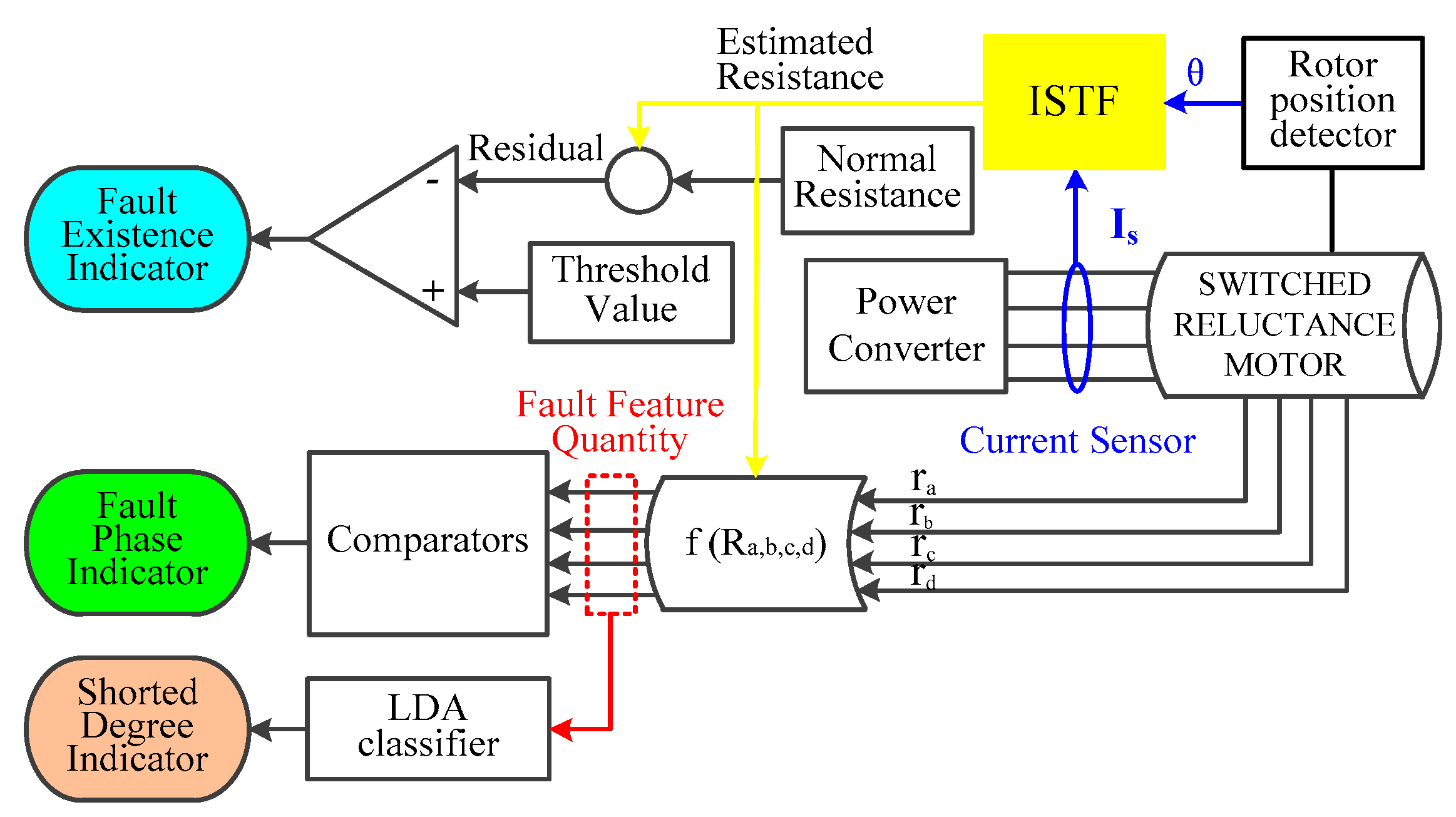
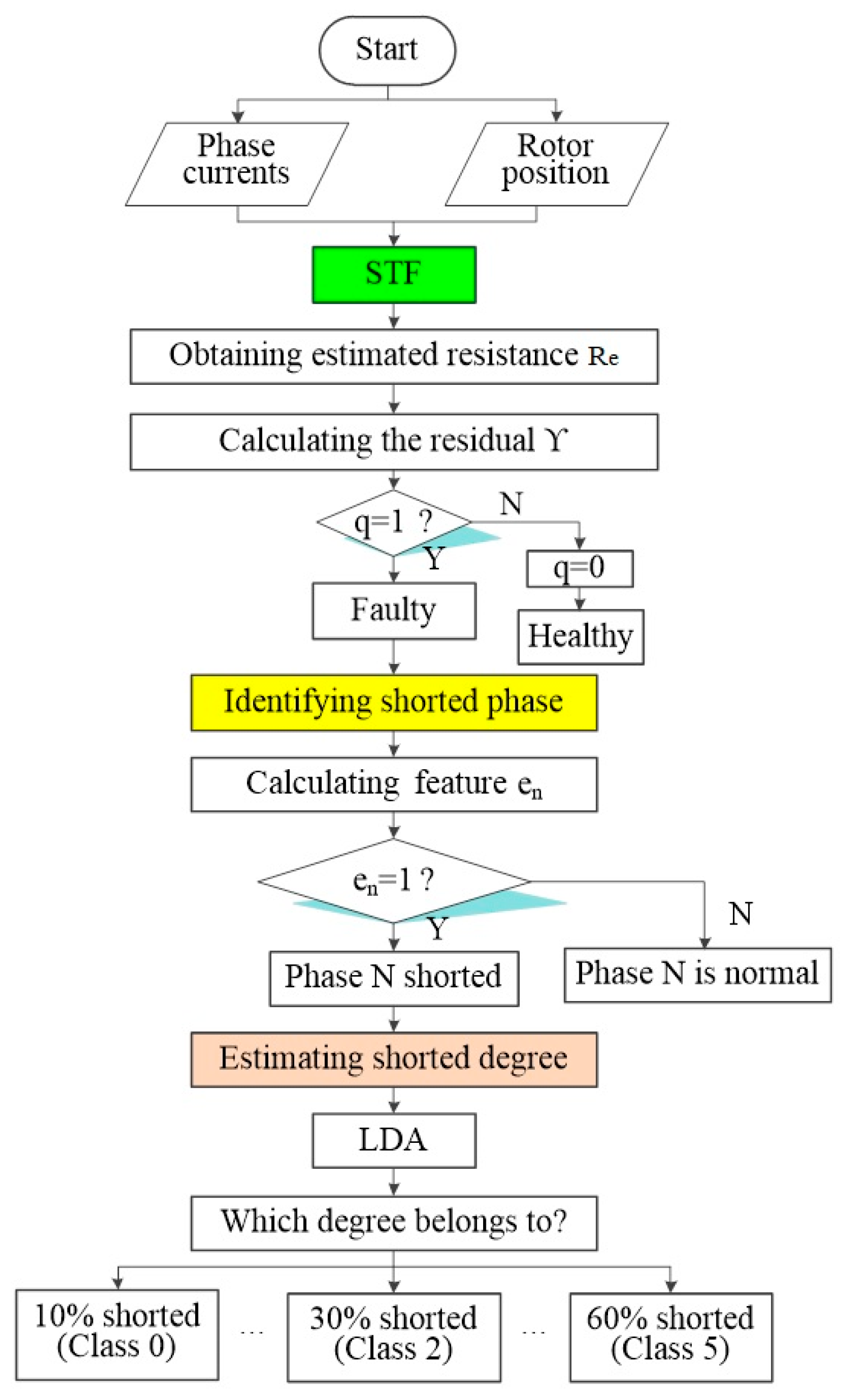
4. The Proposed Fault Diagnosis Method for Inter-Turn Shorted-Circuit Fault (ISCF)
4.1. Detecting the Occurrence of ISCF
4.2. Identifying the Faulty Phase
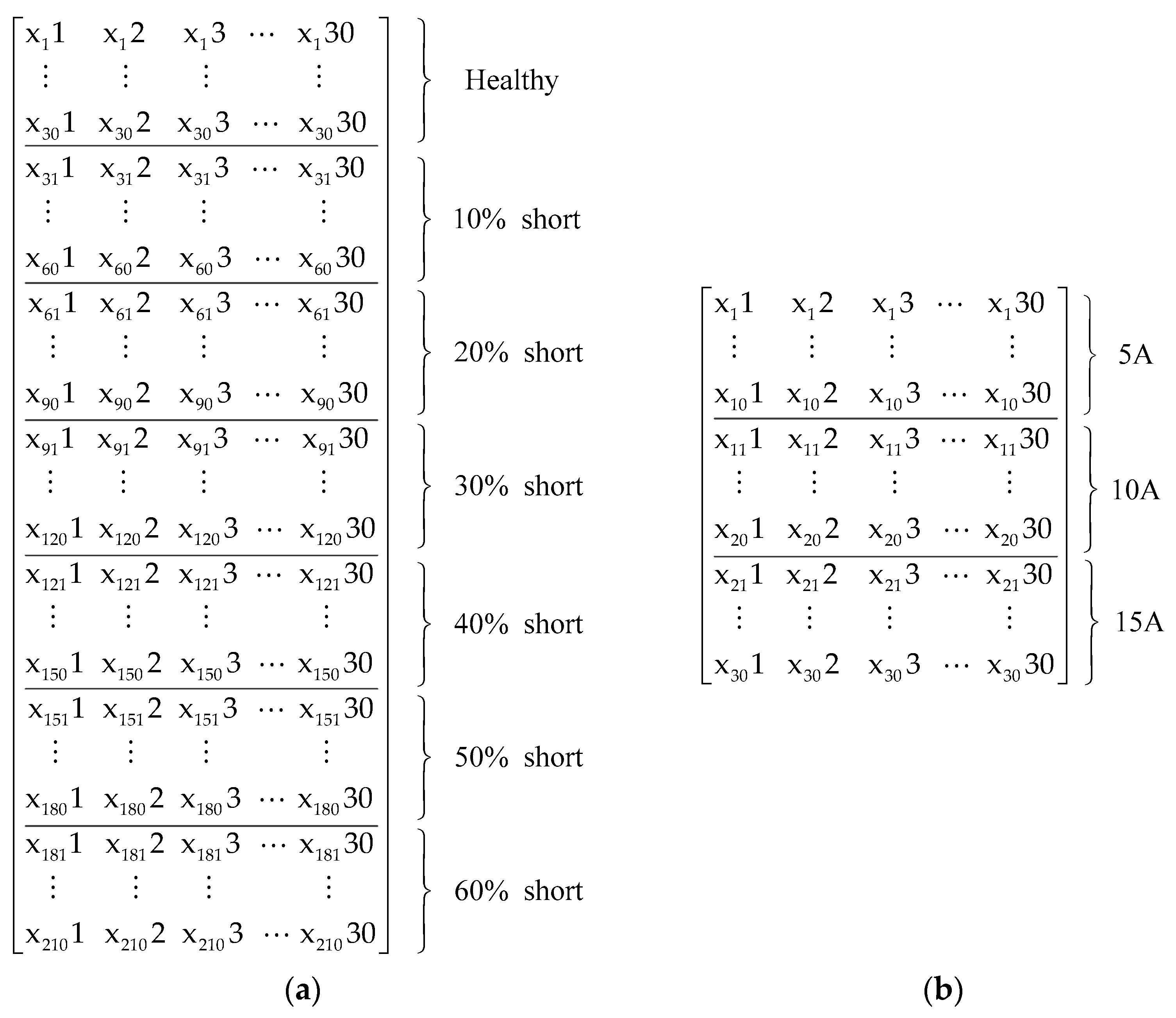
4.3. Estimation of Fault Severity
5. Simulation and Experimental Results
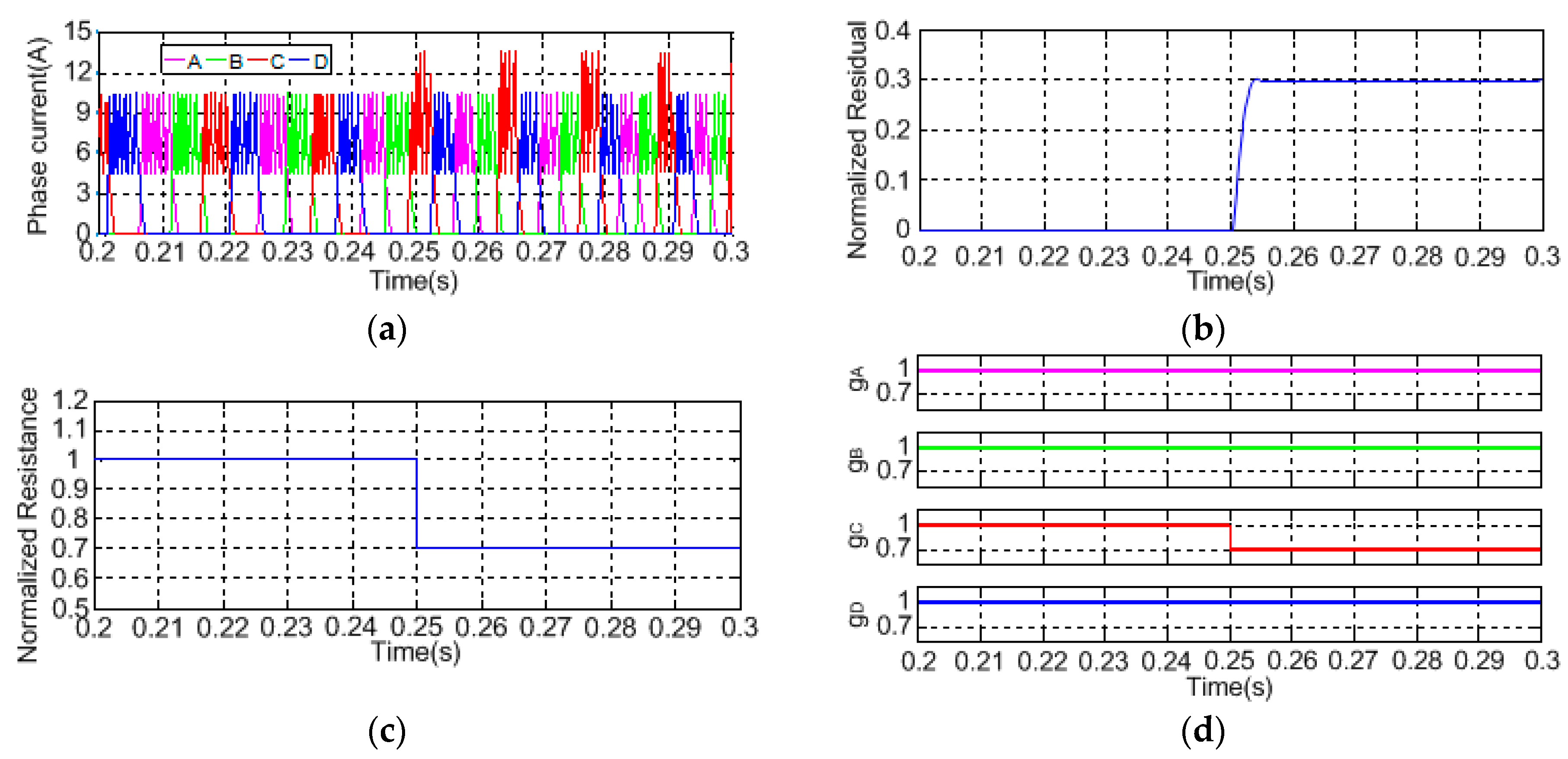
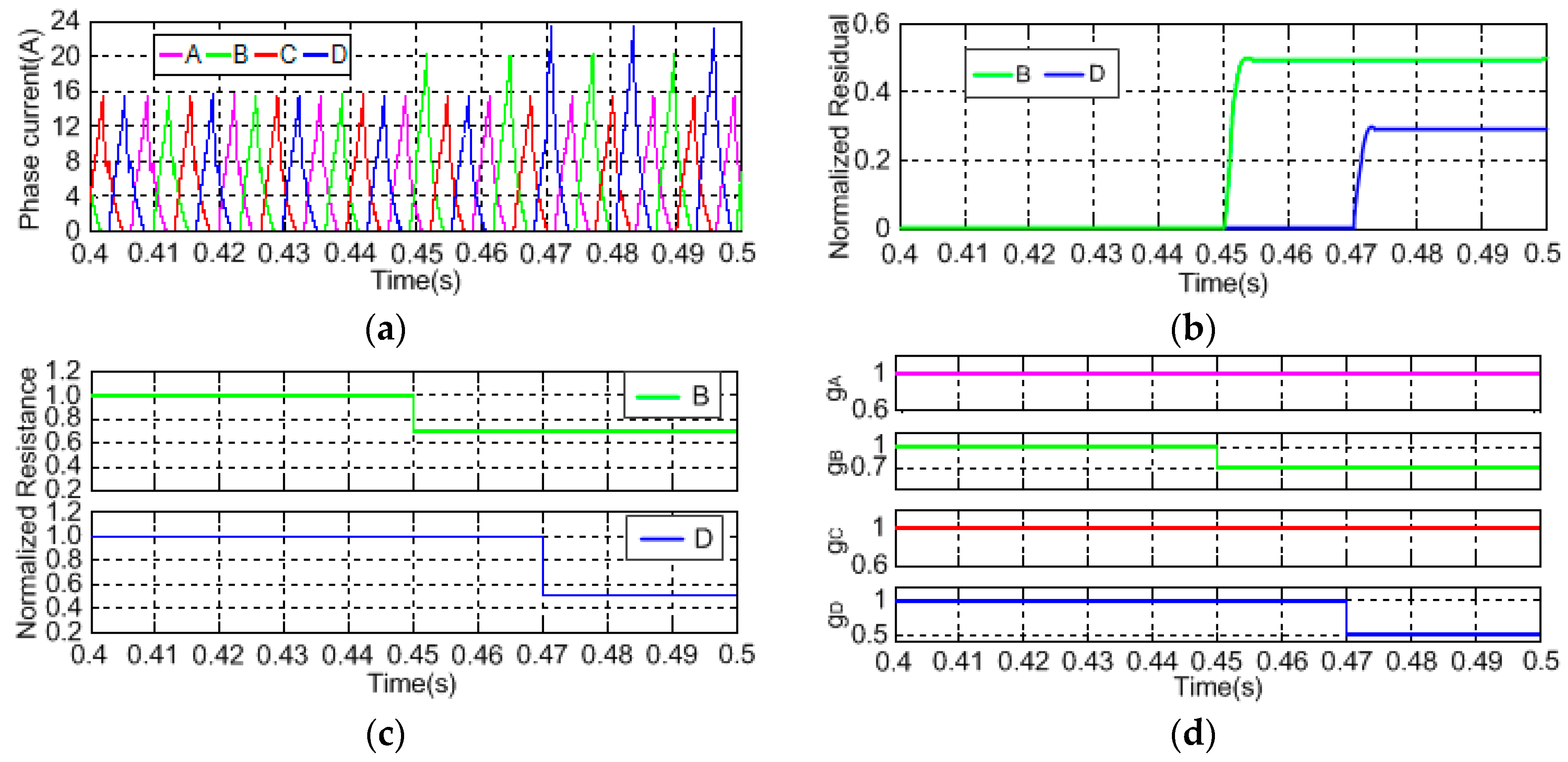
5.1. Simulation Analysis
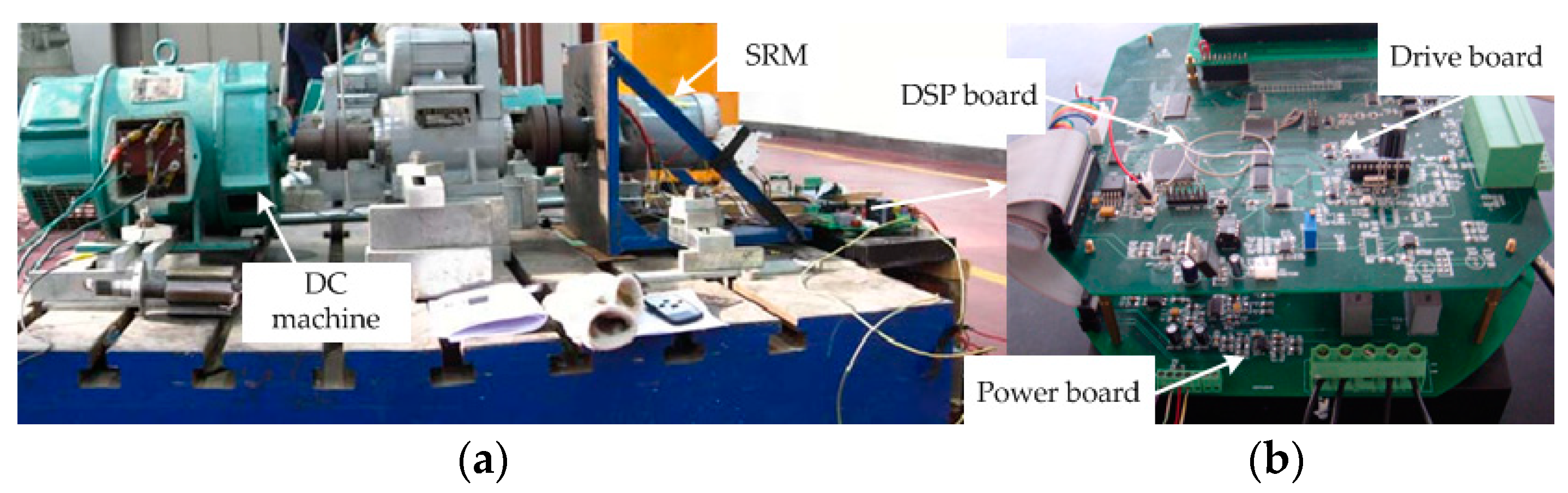
5.2. Experimental Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bruno, L.; Suresh, G.; Avoki, M.O. Winding short circuits in the switched reluctance drive. IEEE Trans. Ind. Appl. 2005, 41, 1178–1184. [Google Scholar]
- Suresh, G.; Avoki, M.O.; Bruno, L. Classification and remediation of electrical Faults in the switched reluctance drive. IEEE Trans. Ind. Appl. 2006, 42, 479–486. [Google Scholar]
- Rareş, T.; Ioana, B. Effects of winding faults on the switched reluctance machine’s working performances. In Proceedings of the 3rd IEEE International Symposium on Logistics and Industrial Informatics, Budapest, Hungary, 25–27 August 2013. [Google Scholar]
- Dorrell, D.G.; Makhoba, K. Detection of Inter-Turn Stator Faults in Induction Motors Using Short-Term Averaging of Forward and Backward Rotating Stator Current Phasors for Fast Prognostics. IEEE Trans. Magn. 2017, 53, 1–7. [Google Scholar] [CrossRef]
- Obeid, N.H.; Boileau, T.; Nahid-Mobarakeh, B. Modeling and Diagnostic of Incipient Inter-turn Faults for a Three-Phase Permanent Magnet Synchronous Motor. IEEE Trans. Ind. Appl. 2016, 52, 4426–4434. [Google Scholar] [CrossRef]
- Cuevas, M.; Romary, R.; Lecointe, J.P.; Jacq, T. Non-Invasive Detection of Rotor Short-Circuit Fault in Synchronous Machines by Analysis of Stray Magnetic Field and Frame Vibrations. IEEE Trans. Magn. 2016, 52, 1–4. [Google Scholar] [CrossRef]
- Jawadekar, A.; Paraskar, S.; Jadhav, S.; Dhole, G. Artificial neuralnetwork-based induction motor fault classifier using continuous wavelet transform. Syst. Sci. Control Eng. 2014, 2, 684–690. [Google Scholar] [CrossRef]
- Rodríguez, P.V.J.; Arkkio, A. Detection of stator winding fault in induction motor using fuzzy logic. Appl. Soft Comput. 2007, 8, 1112–1120. [Google Scholar] [CrossRef]
- Abiyev, R.; Kaynak, O. Fuzzy wavelet neural networks for identification and control of dynamic plants-a novel structure and a comparative study. IEEE Trans. Ind. Electron. 2008, 55, 3133–3140. [Google Scholar] [CrossRef]
- Li, X.; Sun, H. Analysis and research of short-circuit fault for SRD based on Maxwell and simplorer. In Proceedings of the 4th International Conference on Manufacturing Science and Engineering, Dalian, China, 30–31 March 2013. [Google Scholar]
- Chen, H.; Han, G.; Yan, W.; Lu, S.; Chen, Z. Modeling of a Switched Reluctance Motor Under Stator Winding Fault Condition. IEEE Trans. Appl. Supercond. 2016, 26, 1–6. [Google Scholar]
- Torkaman, H. Intern-turn short-circuit fault detection in switched reluctance motor utilizing MCPT test. Int. J. Appl. Electromagn. Mech. 2014, 46, 619–628. [Google Scholar]
- Hoseini, S.R.K.; Farjah, E.; Ghanbari, T.; Givi, H. Extended Kalman filter-based method for inter-turn fault detection of the switched reluctance motors. IET Electr. Power Appl. 2016, 10, 714–722. [Google Scholar] [CrossRef]
- Xiao, L.; Sun, H.; Gao, F.; Hou, S.; Li, L. A New Diagnostic Method for Winding Short-Circuit Fault for SRM Based on Symmetrical Component Analysis. Chin. J. Electr. Eng. 2018, 4, 74–82. [Google Scholar]
- Aubert, B.; Regnier, J.; Caux, S.; Alejo, D. Kalman-Filter-Based Indicator for Online Inter turn Short Circuits Detection in Permanent-Magnet Synchronous Generators. IEEE Trans. Ind. Electron. 2015, 62, 1921–1930. [Google Scholar] [CrossRef]
- Nadarajan, S.; Panda, S.K.; Bhangu, B.; Gupta, A.K. Online Model-Based Condition Monitoring for Brushless Wound-Field Synchronous Generator to Detect and Diagnose Stator Windings Turn-to-Turn Shorts Using Extended Kalman Filter. IEEE Trans. Ind. Electron. 2016, 63, 3228–3241. [Google Scholar] [CrossRef]
- Liu, M.; Zhou, D.H. Normalized residuals based strong tracking filter and its application. Proc. CSEE 2005, 25, 71–75. [Google Scholar]
- Yu, W.; Zhao, C. Sparse Exponential Discriminant Analysis and Its Application to Fault Diagnosis. IEEE Trans. Ind. Electron. 2018, 65, 5931–5940. [Google Scholar] [CrossRef]
- Mbo’o, C.P.; Hameyer, K. Fault Diagnosis of Bearing Damage by Means of the Linear Discriminant Analysis of Stator Current Features from the Frequency Selection. IEEE Trans. Ind. Appl. 2016, 52, 3861–3868. [Google Scholar] [CrossRef]
- Li, W.; Zhao, C.; Gao, F. Linearity evaluation and variable subset partition based hierarchical process modeling and monitoring. IEEE Trans. Ind. Electron. 2018, 65, 2683–2692. [Google Scholar] [CrossRef]
- Reemon, Z.H.; Elias, G.S. On the Accuracy of Fault Detection and Separation in Permanent Magnet Synchronous Machines Using MCSA/MVSA and LDA. IEEE Trans. Energy Convers. 2016, 31, 924–934. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Diagnostic Variable | Phase Winding Status | Faulty Phase | |||||
|---|---|---|---|---|---|---|---|
| q | eA | eB | eC | eD | ∑en | ||
| 1 | 1 | 0 | 0 | 0 | 1 | ISCF | A |
| 1 | 0 | 1 | 0 | 0 | 1 | ISCF | B |
| 1 | 0 | 0 | 1 | 0 | 1 | ISCF | C |
| 1 | 0 | 0 | 0 | 1 | 1 | ISCF | D |
| 0 | - | - | - | - | - | Normal | - |
| Diagnostic Variable | Faulty Number | Faulty Phase | |||||
|---|---|---|---|---|---|---|---|
| q | eA | eB | eC | eD | ∑en | ||
| 1 | 0 | 0 | 1 | 0 | 1 | 1 | C |
| 1 | 1 | 0 | 1 | 0 | 2 | 2 | A C |
| 1 | 1 | 1 | 1 | 0 | 3 | 3 | A B C |
| 1 | 1 | 1 | 1 | 1 | 4 | 4 | A B C D |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Number of phases | 4 | rated voltage of the supply | 220 V |
| Number of stator poles | 8 | number of rotor poles | 6 |
| Resistance of normal phase | 4 Ω | turn number of each phase | 120 turns |
| Rated power | 1500 W | rated speed | 1500 r/min |
| Faulty Degree | Correct Classification | |||
|---|---|---|---|---|
| Simulation Results | Experimental Results | |||
| No-Load | 50% Full Load | No-Load | 50% Full Load | |
| Healthy | 100% | 100% | 100% | 100% |
| 10% | 97% | 97% | 95% | 95% |
| 20% | 100% | 99% | 97% | 97% |
| 30% | 100% | 100% | 99% | 99% |
| 40% | 100% | 100% | 100% | 100% |
| 50% | 100% | 100% | 100% | 100% |
| 60% | 100% | 100% | 100% | 100% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, L.; Sun, H.; Zhang, L.; Niu, F.; Yu, L.; Ren, X. Applications of a Strong Track Filter and LDA for On-Line Identification of a Switched Reluctance Machine Stator Inter-Turn Shorted-Circuit Fault. Energies 2019, 12, 134. https://doi.org/10.3390/en12010134
Xiao L, Sun H, Zhang L, Niu F, Yu L, Ren X. Applications of a Strong Track Filter and LDA for On-Line Identification of a Switched Reluctance Machine Stator Inter-Turn Shorted-Circuit Fault. Energies. 2019; 12(1):134. https://doi.org/10.3390/en12010134
Chicago/Turabian StyleXiao, Li, Hexu Sun, Liyi Zhang, Feng Niu, Lu Yu, and Xuhe Ren. 2019. "Applications of a Strong Track Filter and LDA for On-Line Identification of a Switched Reluctance Machine Stator Inter-Turn Shorted-Circuit Fault" Energies 12, no. 1: 134. https://doi.org/10.3390/en12010134
APA StyleXiao, L., Sun, H., Zhang, L., Niu, F., Yu, L., & Ren, X. (2019). Applications of a Strong Track Filter and LDA for On-Line Identification of a Switched Reluctance Machine Stator Inter-Turn Shorted-Circuit Fault. Energies, 12(1), 134. https://doi.org/10.3390/en12010134