1. Introduction
The increasing seriousness of the energy crisis and environment preservation create new challenges for the energy industry. How to improve the utilization efficiency of energy while reducing power production costs and solving pollution problems? The emergence of microgrids has brought new effective technology to solve the problems facing the current energy industry. With the development of renewable energy (wind, solar, etc.) generation technology, the renewable energy source is increasingly used as a distributed generation (DG) unit in microgrids. However, the higher intermittent of renewables would lead to power fluctuation, that means coordinated operation of microgrids cannot be implemented. Energy management is the premise and basis of the coordinated operation for microgrids; economic optimization dispatch (EOD) is an attractive issue in terms of goals pursued (minimum-cost, maximum-profit and/or reliable operation, environment concern) and can face towards the operator and customer at the same time.
The economy and the environmental benefits of microgrid operation are the key to solving the EOD problem. So far, many researchers have developed solutions and strategies to handle the optimization dispatching under different objective and constraint conditions [
1,
2,
3]. In general, the dispatch problem is seen as an optimization problem to minimize the operation costs. The authors in [
2] proposed a novel battery operating cost model to maximize the efficient and the cycle life of the batteries, without considering additional objective functions of optimal scheduling for microgrid operation. While the optimization dispatch of microgrid to simplify the objectives into single-objective optimization dispatch (SOOD) problem may be acceptable in some situations, only considering the SOOD has lead to either neglecting certain benefits or changing constraint conditions, and different distributed generation units have different objectives or sets of objectives.
The multi-objective optimization dispatch (MOOD) approaches are developed in articles to obtain optimal scheduling plans for supplying the load under constraint conditions while taking minimum levels of cost, emission cost and other goals for microgrid operation [
4,
5,
6,
7,
8]. In [
9], an energy management model based on day-ahead scheduling is proposed to optimize two objectives, the total operation cost and the CO
emission cost. In addition, the authors in [
10,
11] present an optimization dispatch approach for microgrid operation in order to reduce the operation cost and improve environmental friendliness. The MOOD approach lets us weigh among several competing objective functions and explicitly consider the effect of different objective functions within microgrid operation [
12,
13,
14]. However, the power loss from a large amount of energy conversion devices installed in the microgrid system has been ignored when solving the MOOD problem. The major losses of each converter come from device conduction, switching and inductor [
15]. According to the related literature, the maximum power loss of converters can reach up to 16% of conversion power, the minimum power loss is also equivalent to 2% conversion power [
16,
17]. Therefore, the power loss is considered as one of the optimization objectives to solve the MOOD problem in this paper, and the optimal solution of the MOOD problem is to improve the profit of the operator and utilize efficiency of distributed energy.
Many optimization methods have been proposed to solve the MOOD problem, which is a multi-objective, multi-constraint and non-linear optimization problem. According to some published articles, the optimization techniques are mainly classified into three groups, the traditional mathematical methods, the intelligent optimization methods and hybrid methods. The traditional mathematical methods, such as dynamic programming [
18], stochastic dynamic programming [
19], linear programming [
20] and mixed-integer linear programming [
21], are applied to solve optimization dispatch problems on different microgrids. These methods are used for large-scale optimization problems, and some methods are computationally fast. However, the traditional mathematical methods are not suitable for the optimization dispatch of a microgrid that is a non-linear, non-smooth and non-convex problem. Considering the features of the MOOD problem, many intelligent methods are used to handle the optimization dispatch of a microgrid. For instance, the genetic algorithm (GA) [
22,
23], particle swarm optimization (PSO) [
24,
25], the strength Pareto evolutionary algorithm (SPEA) [
26] and so on have been increasingly proposed for solving the optimization dispatch problem because of their non-linear mapping, simplicity and powerful search capability. However, the above intelligent methods present the following shortcomings: many parameters are required to set before the optimization and most test cases are parameters sensitive, and a single intelligent optimization method is usually easy to fall into local optimum.
Hybrid method is a technology of integrating two or more different methods to solve the MOOD problem for a microgrid, and has become a hotspot in research now. Hybrid methods can utilize the advantages coming from the different methods, and usually obtains satisfied solutions for optimization dispatch problems in microgrids more easily. Recently, gravitational search algorithm (GSA) was proposed in [
27]; it is a heuristic optimization algorithm based on Newton’s law of gravity and has high computational efficiency without sacrificing accuracy. The advantages and performances of GSA for optimization dispatch problems of microgrids have already been proven [
28], and the convergence of GSA is better than the convergence of particle swarm optimization (PSO) and genetic algorithm (GA) [
29]. Therefore, the aim of this work is to propose a two-stage dispatch (TSD) model combining the day-ahead scheduling and the real-time scheduling for optimization dispatches of microgrids. A hybrid particle swarm optimization and opposition-based learning gravitational search algorithm (PSO-OGSA) is proposed to solve this complicated constrained MOOD problem. The major contribution of this paper includes the following:
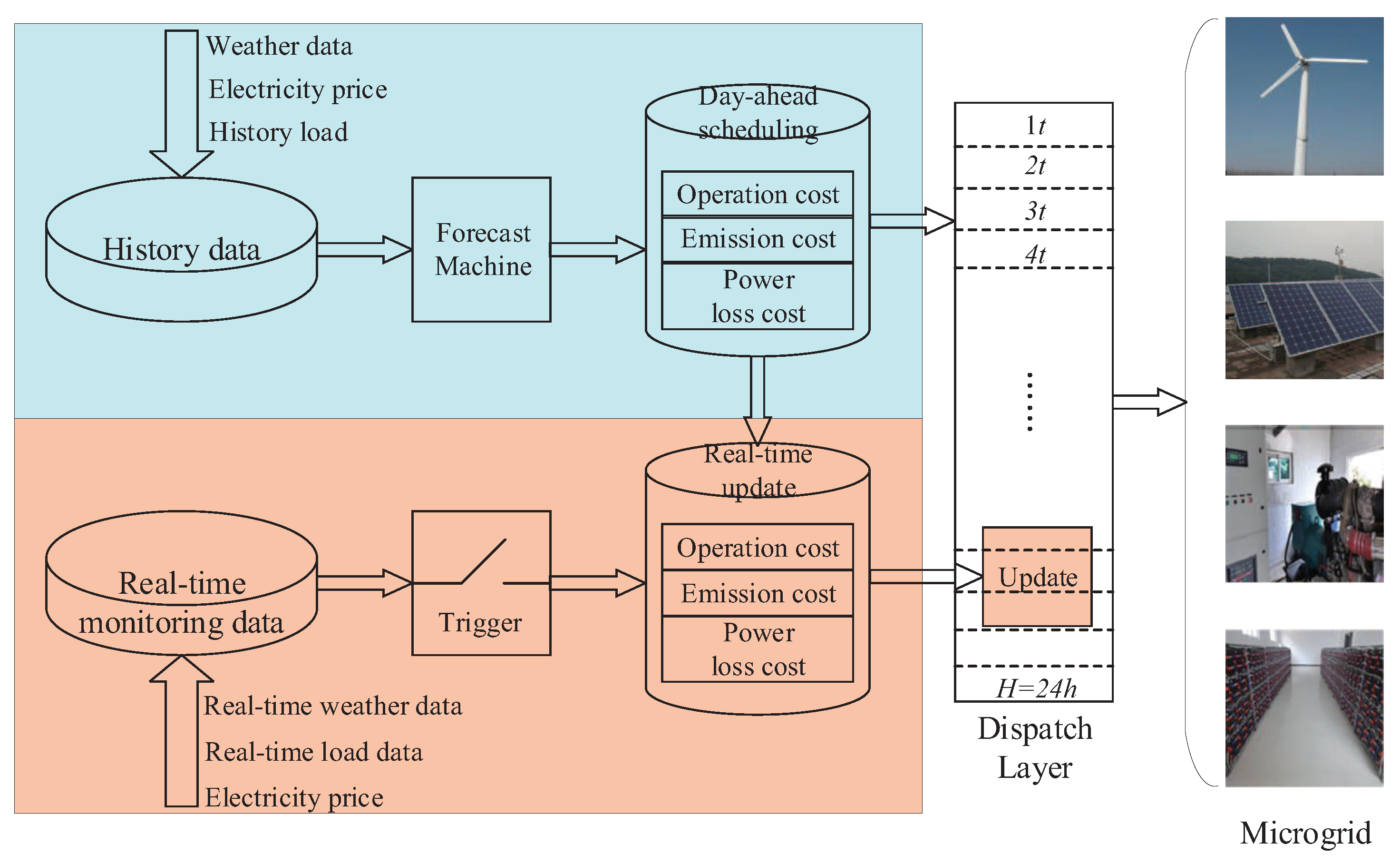
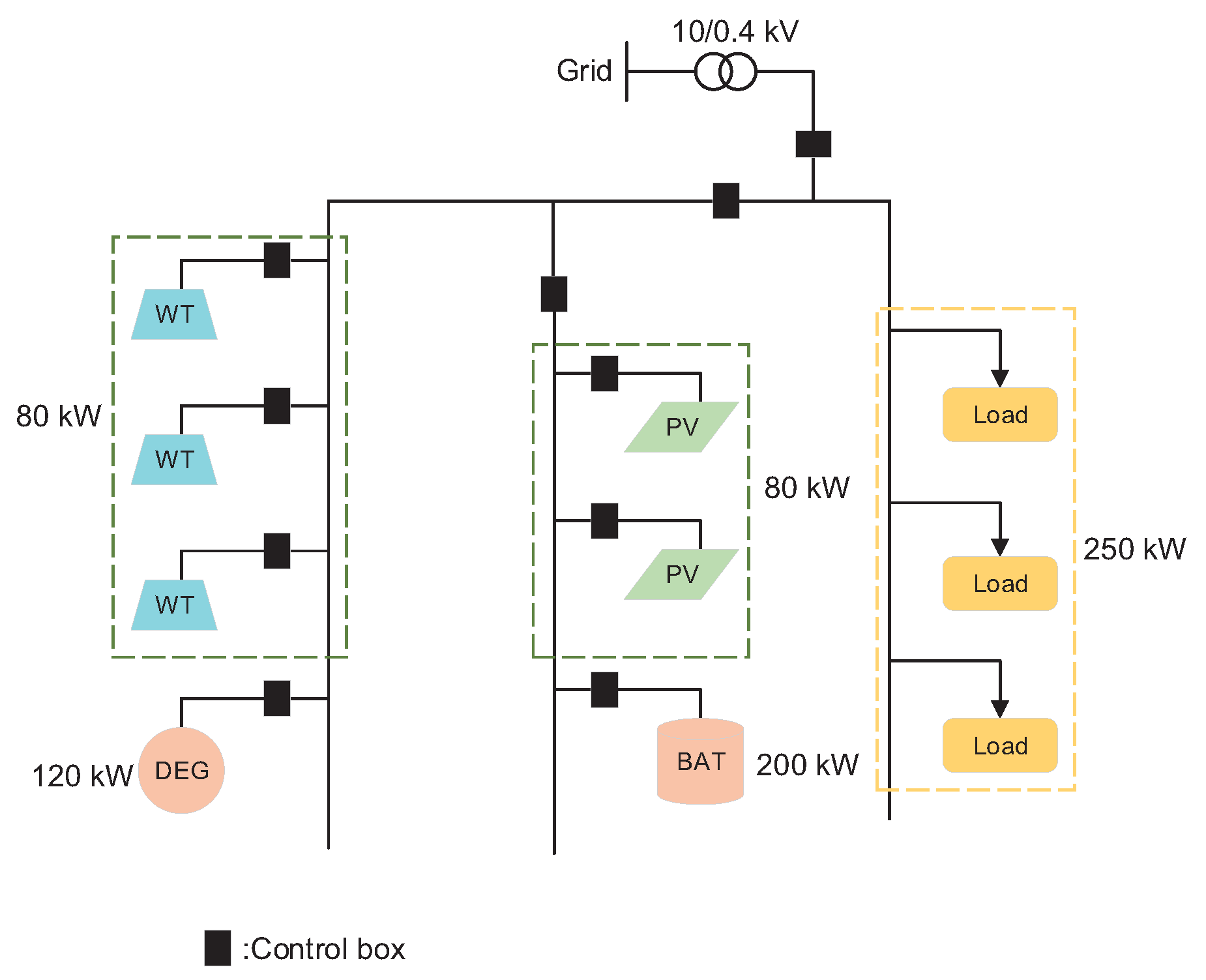
A TSD model which consists of the day-ahead scheduling stage and the real-time update stage is proposed to optimize dispatch for microgrid energy management, as shown in
Figure 1. The TSD model embodies different concepts, the first stage is the day-ahead scheduling based on forecast information to make dispatch plans for the next run day of a microgrid. The second stage, according to real-time information, updates the dispatch plan for the next few dispatch periods in the current running day.
A novel hybrid PSO and opposition-based GSA (PSO-OGSA) is proposed to solve this complicated-constraints MOOD problem. Opposition-based learning (OL) is used to optimize the position distribution of initial populations in order to promote the search efficiency of GSA. The memory and community of PSO have been introduced to improve the acceleration mechanism of GSA, and the weight based inertial mass update rule has made the agents always move toward the best solution.
The rest of this paper is organized as follows.
Section 2 contains the microgrid model and the optimization problem.
Section 3 introduces the mathematical formulation of the proposed PSO-OGSA method to solve the optimization problem.
Section 4 contains the simulation and results analysis. Finally, conclusions are summarized in
Section 5.
3. Proposed Two-Stage Dispatch Model and Optimization Method
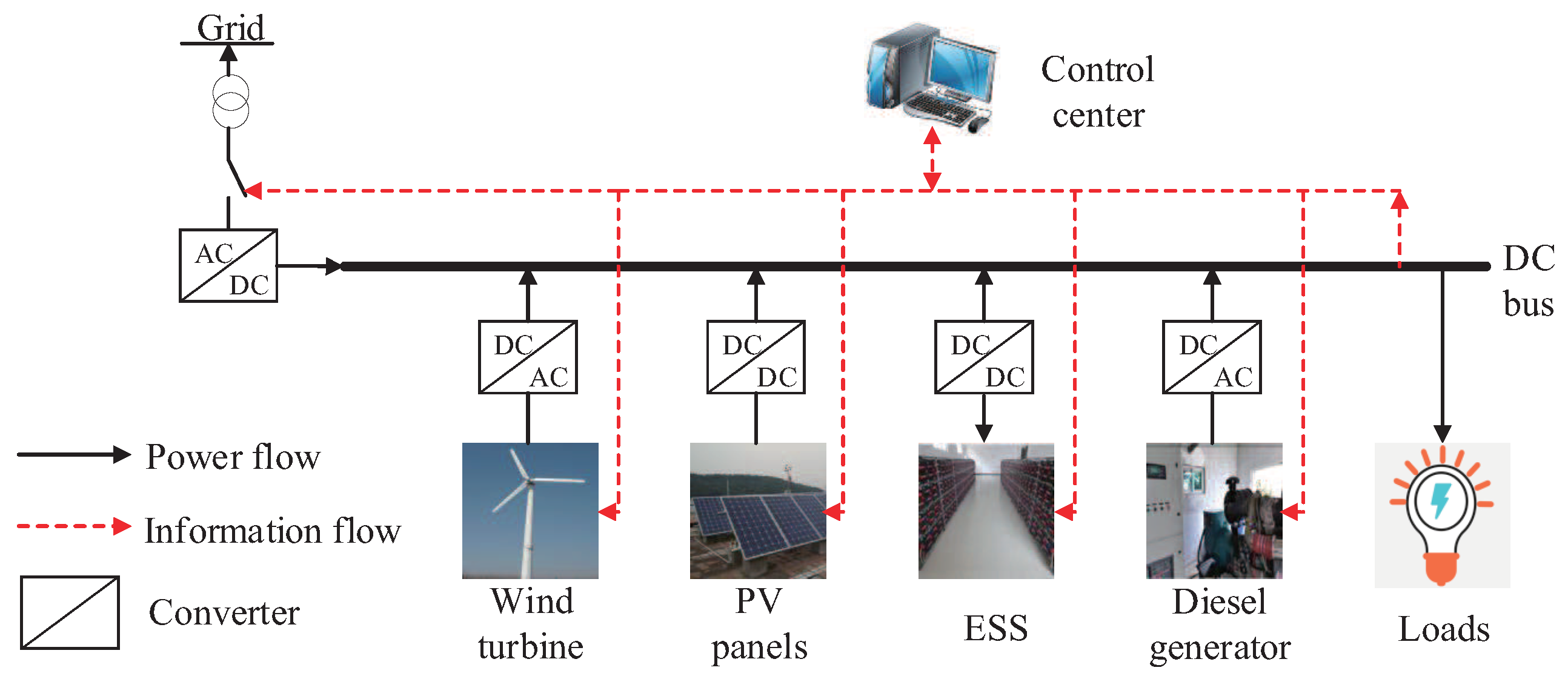
The day-ahead scheduling layer is based on forecast information (forecast generation power, electricity price, forecast load) to formulate a dispatch plan for power setpoints of generator units on the next day. Due to the forecast error, the real-time update stage is based on the real-time data (real-time output power, real-time load, electricity price) to update the dispatch plan for the next few dispatch periods. The objective functions of both stages are solved by the proposed PSO-OGSA under the constraints of the microgrid.
3.1. Two-Stage Dispatch Model
As shown in
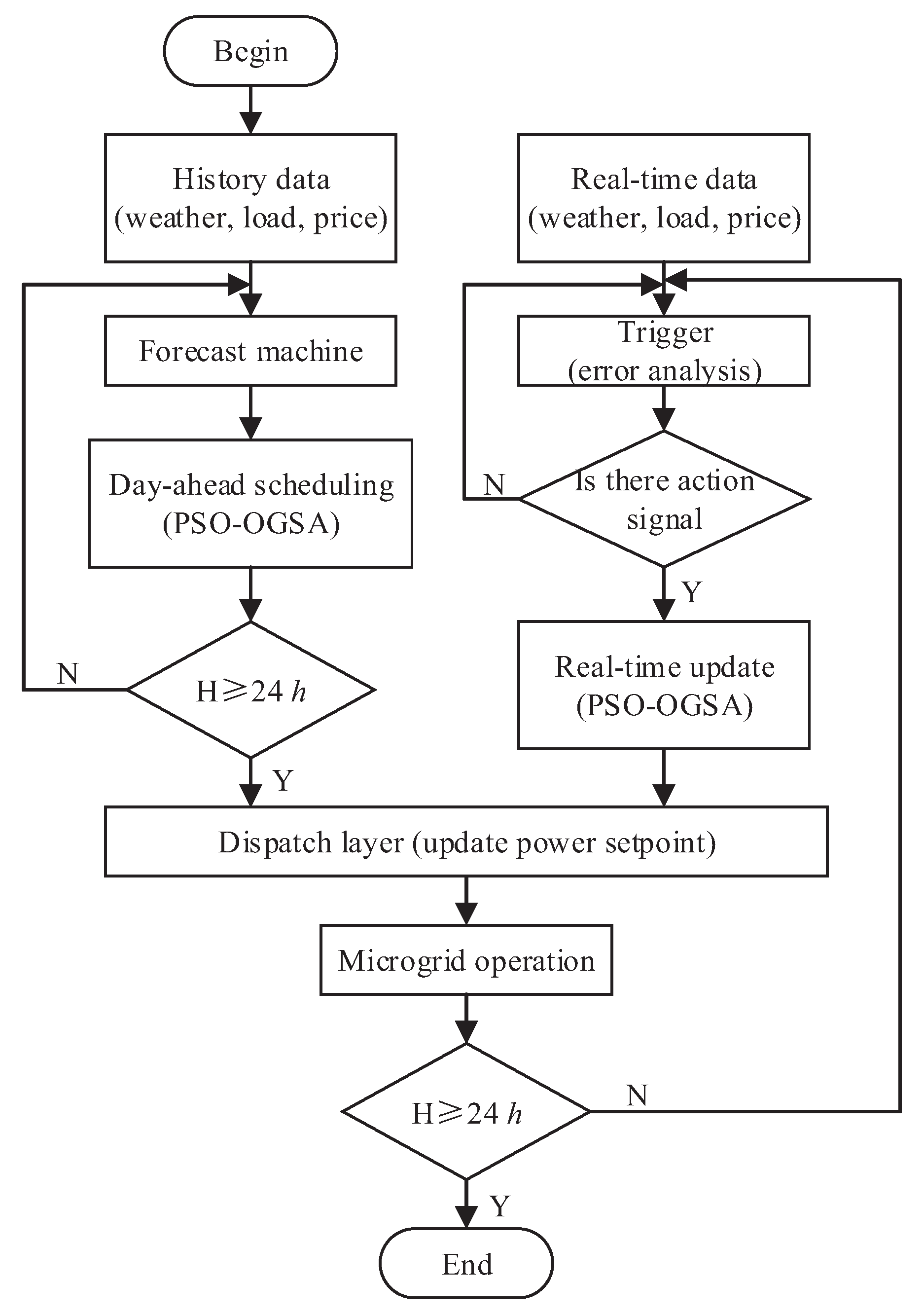
Figure 1, this model consists of two stages, the day-ahead scheduling stage and the real-time update stage. The dispatch time-step of the day-ahead scheduling stage and the real-time update stage are defined as 1 h and 15 min, respectively. A brief flow chart of the proposed TSD model to solve the MOOD problem is illustrated in
Figure 3.
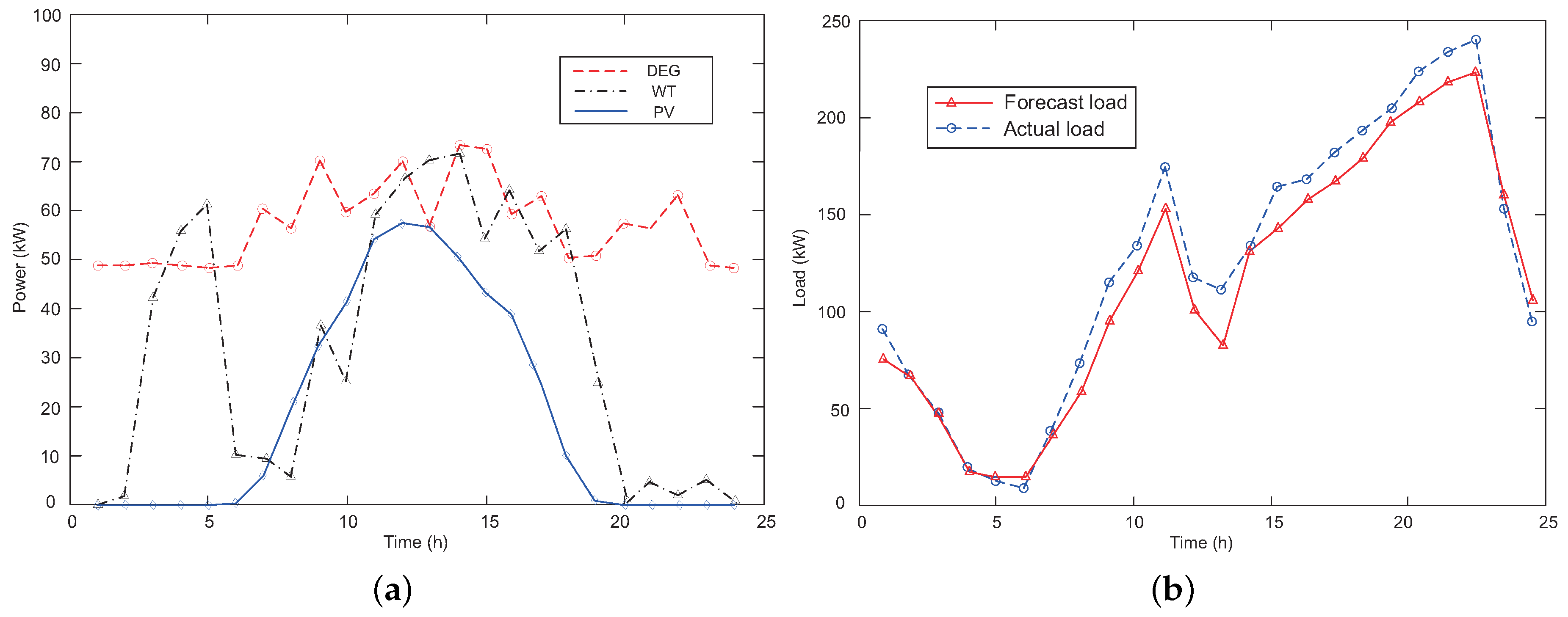
At the day-ahead scheduling stage, the dispatch plan is divided into 24 dispatch periods of 1 h and power setpoint is configured for generation units at each period. This stage is based on the forecast information from the forecast machine to formulate the dispatch plan. The day-ahead scheduling stage uses the proposed PSO-OGSA to optimize the operation cost function, emission cost function and power loss cost function according to the predicted power and load demand. The input data of the forecast machine mainly include weather information, electricity price and history load. Based on this information, the predicted power of generator units and load demand are obtained from the forecast machine for day-ahead scheduling at each period. Considering the forecast error, the predicted power and load demand fluctuate during the running of the microgrid. The fluctuation may leads to a mismatch between the actual load demand and the generation power in the dispatch periods. Therefore, the dispatch plan of the day-scheduling stage must update according to the real-time monitoring information.
The real-time update stage is described in 96 dispatch periods of 15 minutes, and recognizes the action signal of the trigger to formulate the dispatch plan for the next few dispatch periods. Based on the action signal of the trigger, the real-time update stage uses the proposed PSO-OGSA optimization objective functions to formulate and update the dispatch plan for the next few periods during the microgrid operation. The input data of the trigger are the real-time weather information, real-time generation power of generator units and real-time load demand from the microgrid. The action signal of the trigger is activated so that the error range is beyond the critical value, and the error is between the monitoring data and the forecast information. The trigger will export the new predicted power of generation units and load demand after sending the action signal. The real-time weather information mainly includes solar radiation, temperature, air pressure, wind speed, wind direction and humidity, which are obtained from the local meteorological department website. The critical value of the error range of generation power and load demand is set to 10%, and the critical value of the error range of meteorological information is set to 20%.
3.2. Proposed PSO-OGSA
3.2.1. Gravitational Search Algorithm
GSA is a heuristic optimization algorithm based on Newton’s law of gravity [
27]. The solution of the optimization problem is considered as the agent of GSA consisting of different particles in the search space, and each agent attracts other agents through its own gravity force. The motion of agents obeys Newton’s law of motion to make the agent move toward the agent of the heaviest mass. The position of the heaviest mass corresponds to the optimum solution position of the optimization problem in the search space. The agent is specified by four parameters: Position, inertial mass, passive mass and gravity force.
Assume that a system with
N agents, the position of the
ith agent is described by:
where
is the position of the
ith agent in the
dth dimension,
D is the dimension of search space and
N is the number of agents in the search space.
In the specific time
t, the force acting on the agent
i from the agent
j is defined by:
where
is the passive gravitational mass related to agent
i, and
is the active gravitational mass related to agent
j.
is the gravitational constant at time
t and
is a small constant.
is the Euclidean distance between the agent
i and agent
j by the following:
The mass of the agents are calculated as follows:
where
is the fitness value of agent
i at time
t and
is the mass of agents. For a minimization problem,
and
are the best and worst fitness value of all agents at time
t.
To give a stochastic characteristic to the algorithm, suppose that the total force that acts on agent
i in a dimension
d be a randomly weighted sun of
dth components of the forces exerted from other agents.
where
is a random number between interval [0, 1].
is a function of time, with the initial value
at the beginning and decreasing with time. The acceleration of the agent
i at time
t is defined by:
where
is the inertial mass of the agent
i.
Calculating the gravitational constant
at time
t uses the following:
where
is set to 100,
is set to 20 and
t and
are the current and the number of iterations, respectively.
The velocity and position of the agent
i at next time
could be calculated by employing the following:
where
is the random variable between interval [0, 1] and
and
are the velocity and the position of an agent in the
d dimension at time
t, respectively.
Repeating the above steps, the position of the heaviest mass is found out; the position corresponds to the position of the optimum solution of the optimization problem. The local search ability of GSA is weaker than the global search ability, and GSA is prone to optimal value oscillation.
3.2.2. Opposition-Based GSA
The initial solution of the GSA depends on the position of initial agents that randomly guess, and the distance between the initial solutions will effect the computation time of GSA. Moreover, the initial agent of random guesses may lead to the instability of the GSA searching efficiency. Therefore, on the initial stage of GSA, we change the relative position of the initial agents, and make agents closer to the optimal solution. The advantages of opposition-based learning are revolutionary jumps during the early learning stage, and the advantages are weakened gradually as learning continues [
30]. Apparently, sudden switching to opposite values should only be utilized at the start to save time, and should not be maintained as the estimate is already in the vicinity of an existing solution.
Let
be a real number, the opposite number
can be defined as:
Assume
is an original solution in
d-dimension space with
and
. Then, the related opposition point is defined as
where:
Supposing a temporary space consists of the initial agent (solution) opposition value, and calculates the fitness of all agents. All agents from smallest to largest are sorted according to the fitness value of the agent. The N agents with the best fitness value are selected from the temporary space to form an initial population .
In the initial population
, the elite strategy is used to generate new agents for 20% of the
N solutions with the best fitness value, and add the new agents to the initial population
. The fitness value of 120% of the
N solutions is calculated and sorted from smallest to largest, removing 20% of the
N solutions with the worst fitness value. Finally, we can obtain the optimal initial population
P. Among them, the new agents can be expressed as follows:
where
Q is the transform factor of the new agent,
represents the Euclidean distance between the solution and the adjoining solution and
N is the number of the initial population.
3.2.3. Particle Swarm Optimization Based OGSA
GSA must use the exploration to avoid trapping a local optimum at the beginning for the optimization problem [
27]. As similar with the PSO, the solutions of GSA are obtained by the agents moving toward the global optimal solution in the search space. In the GSA, the motion direction of agents is attracted by the total force from other agents. However, when the position of the agents is updated, only considering the current position of the agent, the memory information of the agent is not yet taken into account.
Compared with the GSA, the position of the PSO particles is determined by both the current position information and the community information of particles. Therefore, the performance of the memory and community exchanges of PSO are introduced to improve the search ability of GSA. The motion direction of agents is decided by the new path on GSA, and the new path obeys both Newton’s law of motion and additional performance of the memory and community of PSO. The velocity and position of agents in the PSO-OGSA can be formulated as follows:
where
and
are two constants between the interval [0, 1],
,
, and
are the random variables between the interval [0, 1],
is a variable within [0, 1] to determine stochastic impacts of GSA acceleration and PSO velocity on PSO-OGSA,
is the historical optimal value of the agent
i and
is the global optimal value of all agents.
The process of the proposed PSO-OGSA can be summarized as in
Table 1; the global optimal solution has been observed by each agent and moves toward it so that the movement process always obeys the law of motion. The total force of the heaviest agent is greater than the force of other agents; in other words, the solution represented by the heaviest agent is better than the solution represented by the light agent. In order to make the gravity force of the heavier agent stronger and the gravity force of light agent weaker, the heavier agent can move quickly toward the global optimal solution in the search space. A weight proposed is used to update the mass of all agents at the iteration time, and it not only speeds up the agent movement to the global optimal solution, but also improves the convergence of PSO-OGSA. The weight
H is calculated according to the mass of the agent at each iteration, and weight
H can be defined by the following:
where
represents the weight of the agent
i,
= 1 and
= 5 are the minimum and maximum of the weight, respectively, and
and
are the maximum and minimum of the mass agent in the search space, respectively.
5. Conclusions
A TSD dispatch model combined the day-ahead scheduling and the real-time scheduling was proposed to apply optimization dispatch in order to minimize the total cost of microgrid operation. In this paper, we considered the power loss of the converters, and combined the operation cost with the emission cost to formulate the multi-objective optimization model. We proposed a hybrid particle swarm optimization and opposition-based learning gravity search algorithm to find the best solution of the dispatch plan for MOOD problem in the test microgrid. Based on the production forecast of WT and PV and load demand, the SOC of the storage batteries and the generation power of the diesel generator, the TSD model is used to search the optimal path by all possible system states in the 24-h dispatch planning. If the difference between day-ahead forecast and 15 min forecast of the current running is greater than the 10% power reserve, the dispatch plans are updated to recalculate the power setpoint for each generation unit. This PSO-OGSA algorithm enables us to find the optimization dispatch values while satisfying the constraint conditions.
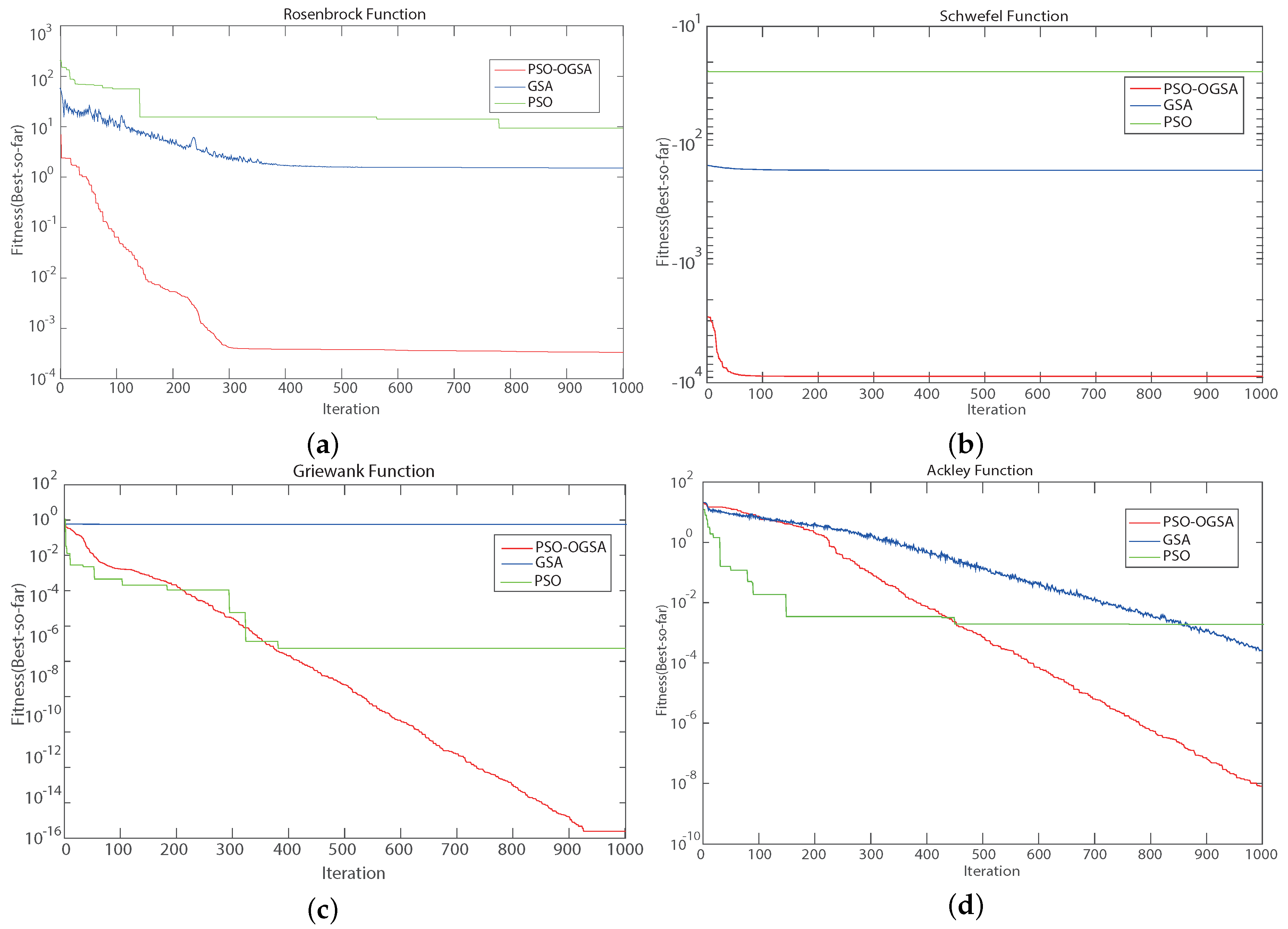
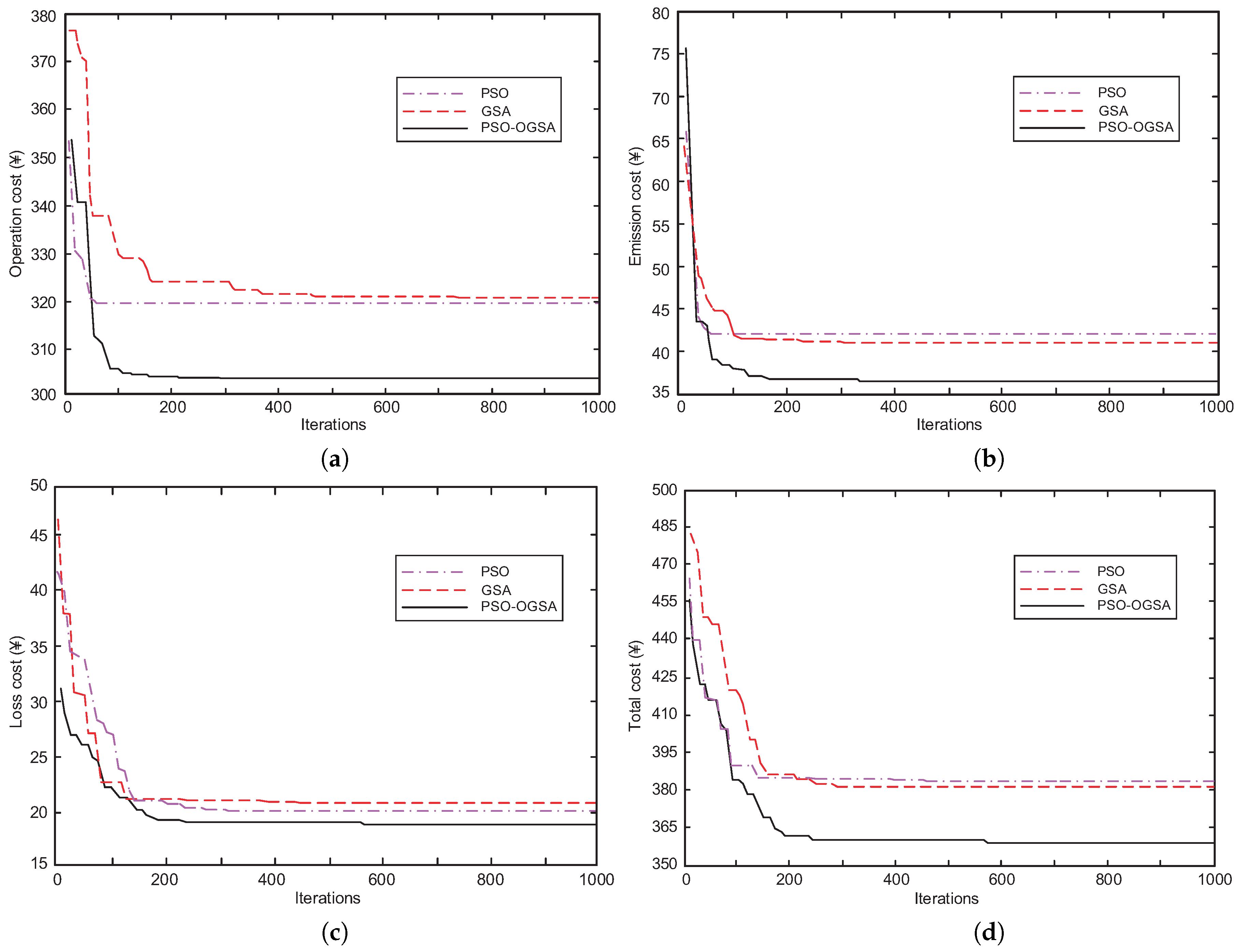
For the PSO-OGSA, opposition-based learning is used to optimize the initial population agents for GSA and strengthen the capacity of escaping from the localization trap quickly. The memory and community of PSO are introduced to improve the acceleration mechanism of GSA, and add a weight-based inertial mass update rule to make the agents speed up toward the best solution. The PSO-OGSA has been tested on five benchmark functions to validate the effectiveness, and the TSD model has been implemented into an actual microgrid system to simulate in real-time dispatch. The optimal results of PSO-OGSA are compared with the results from other algorithms, and demonstrate that the proposed approach is effective to solve the MOOD problem for a microgrid.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}