Research on Switching Interconnection Modes and Game Control of Interconnected Air Suspension


Abstract
:1. Introduction
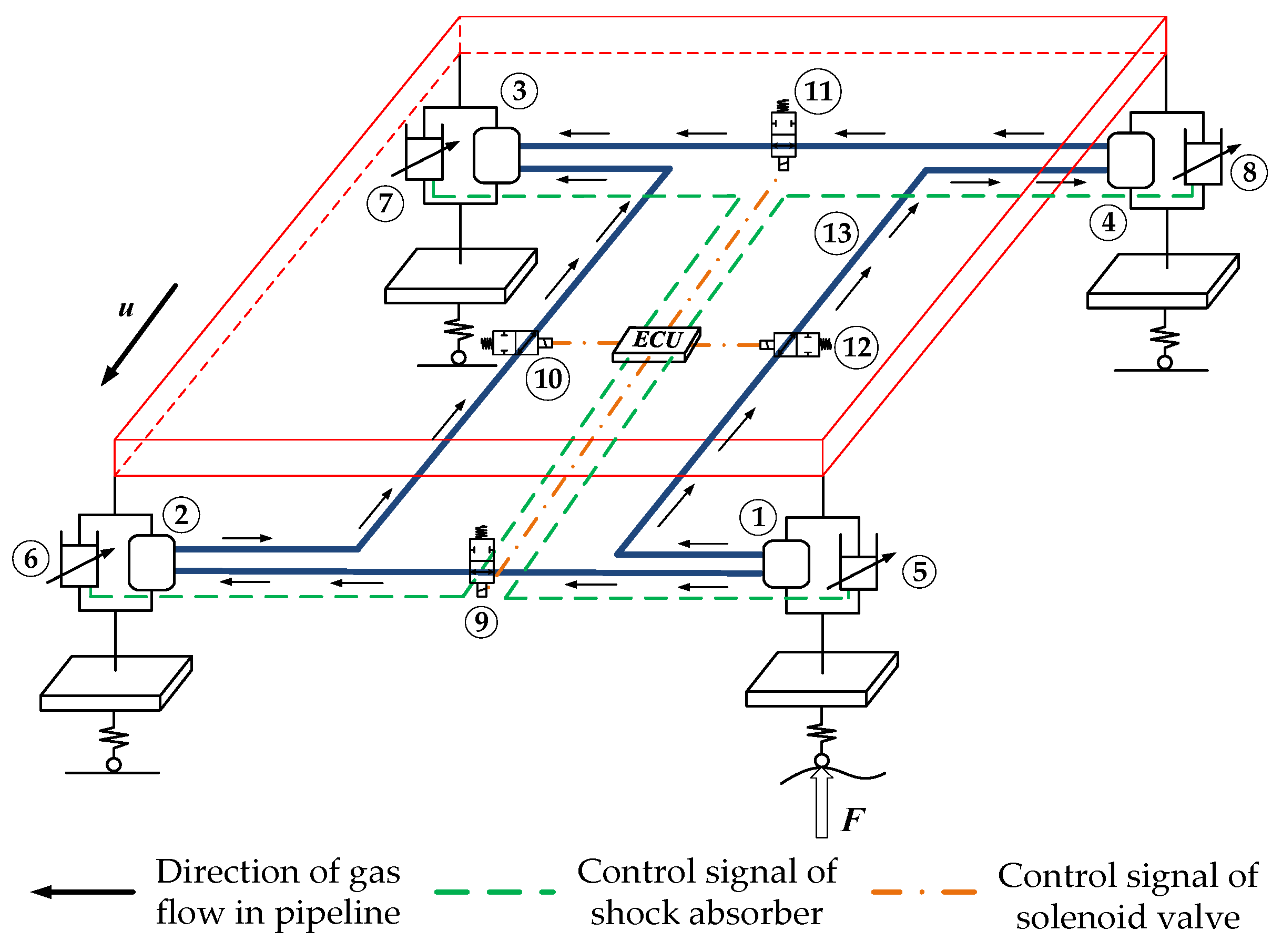
2. The Structure and Working Principle of IASS
3. Vehicle Dynamics Model of the IASS
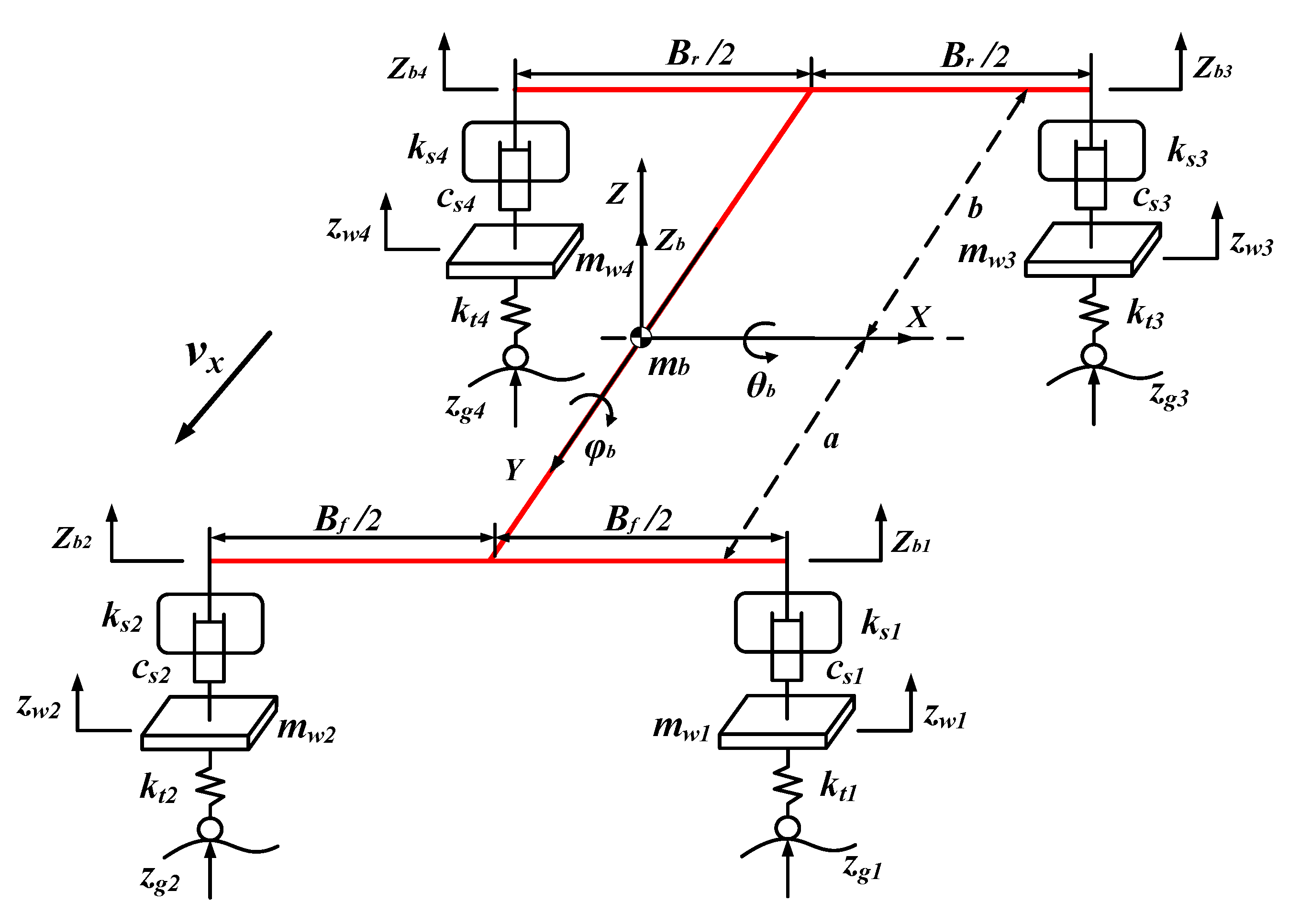
3.1. Vehicle Dynamics Model
3.2. Interconnected Air Spring and Pipeline Model
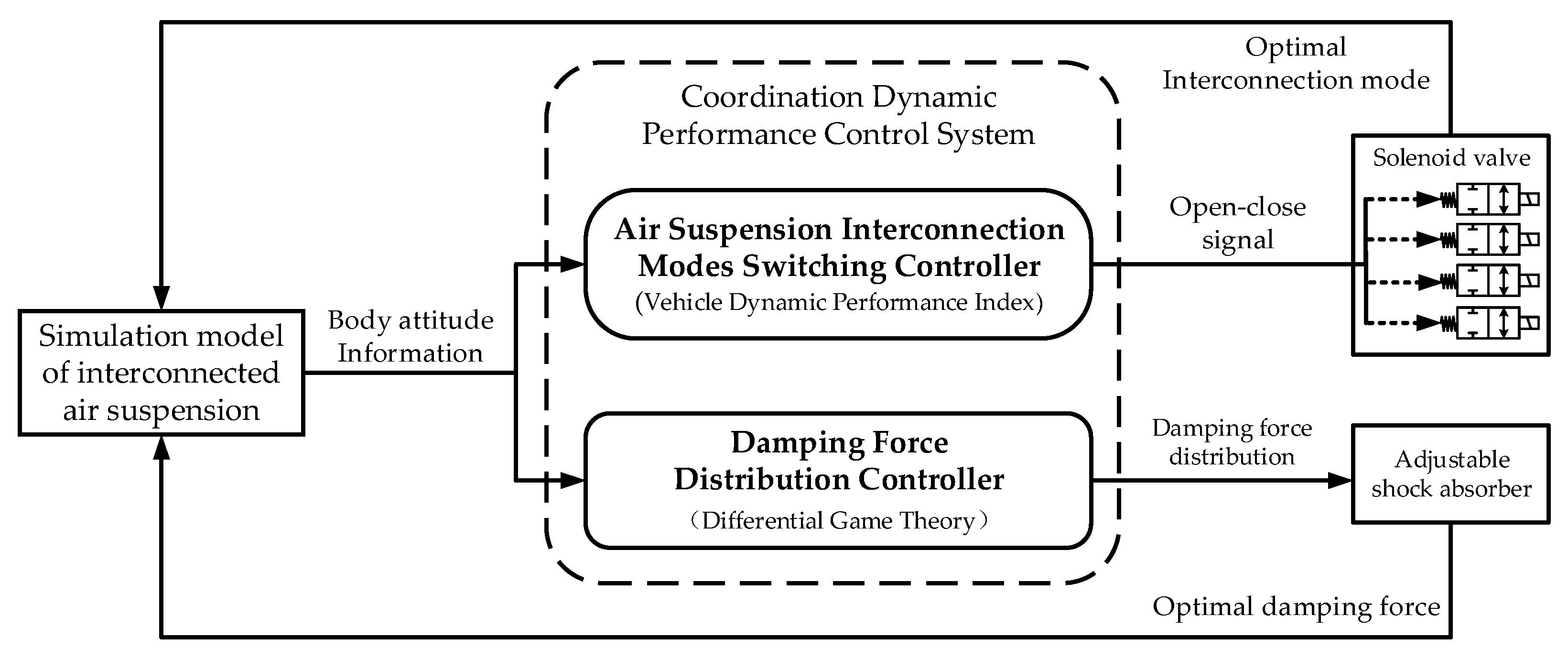
4. Design of Coordinated Vehicle Dynamic Performance Control System
4.1. General Design
4.2. Design of Air Suspension Interconnection Modes Switching Controller
4.2.1. Establishment of Comprehensive Indicators
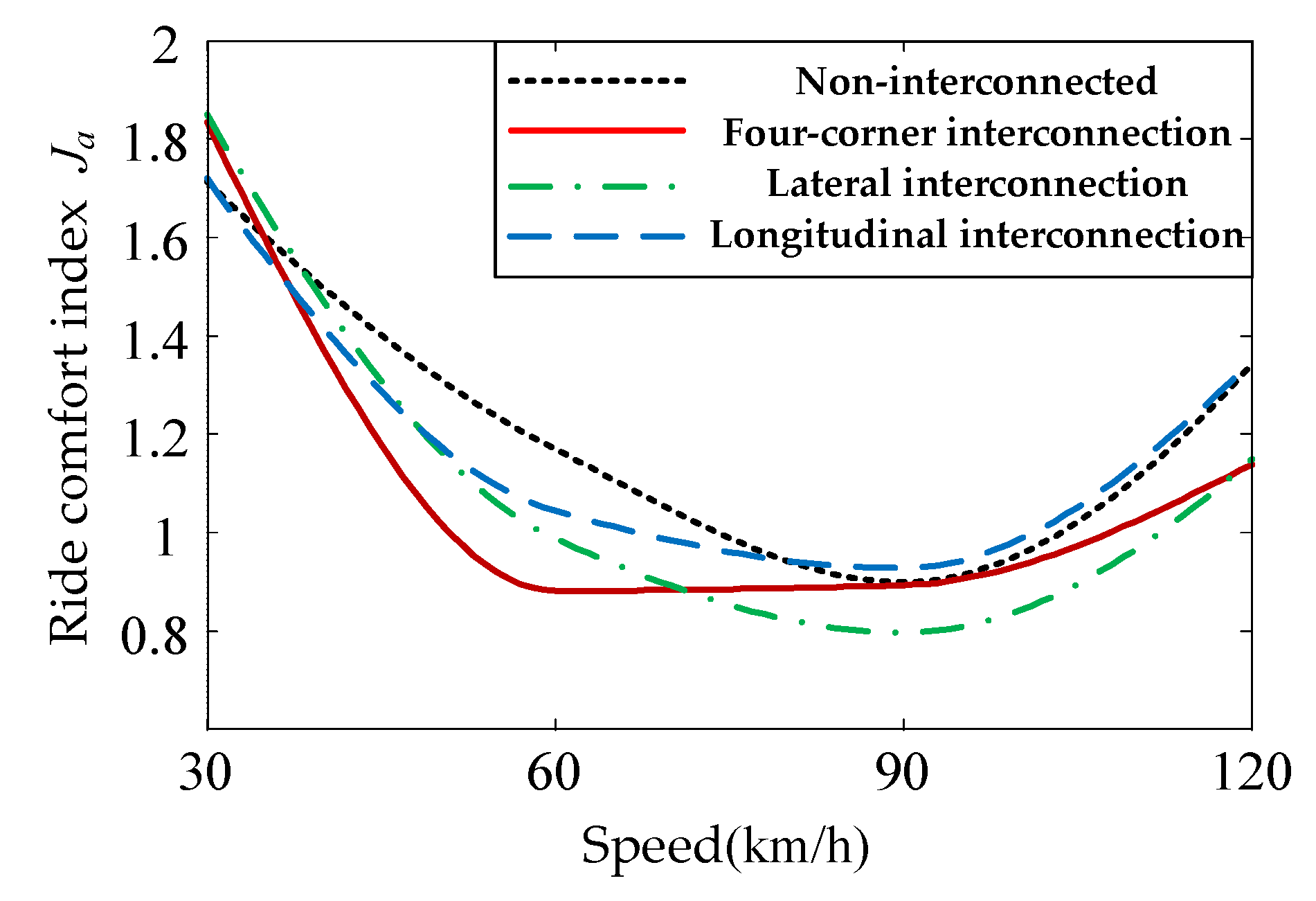
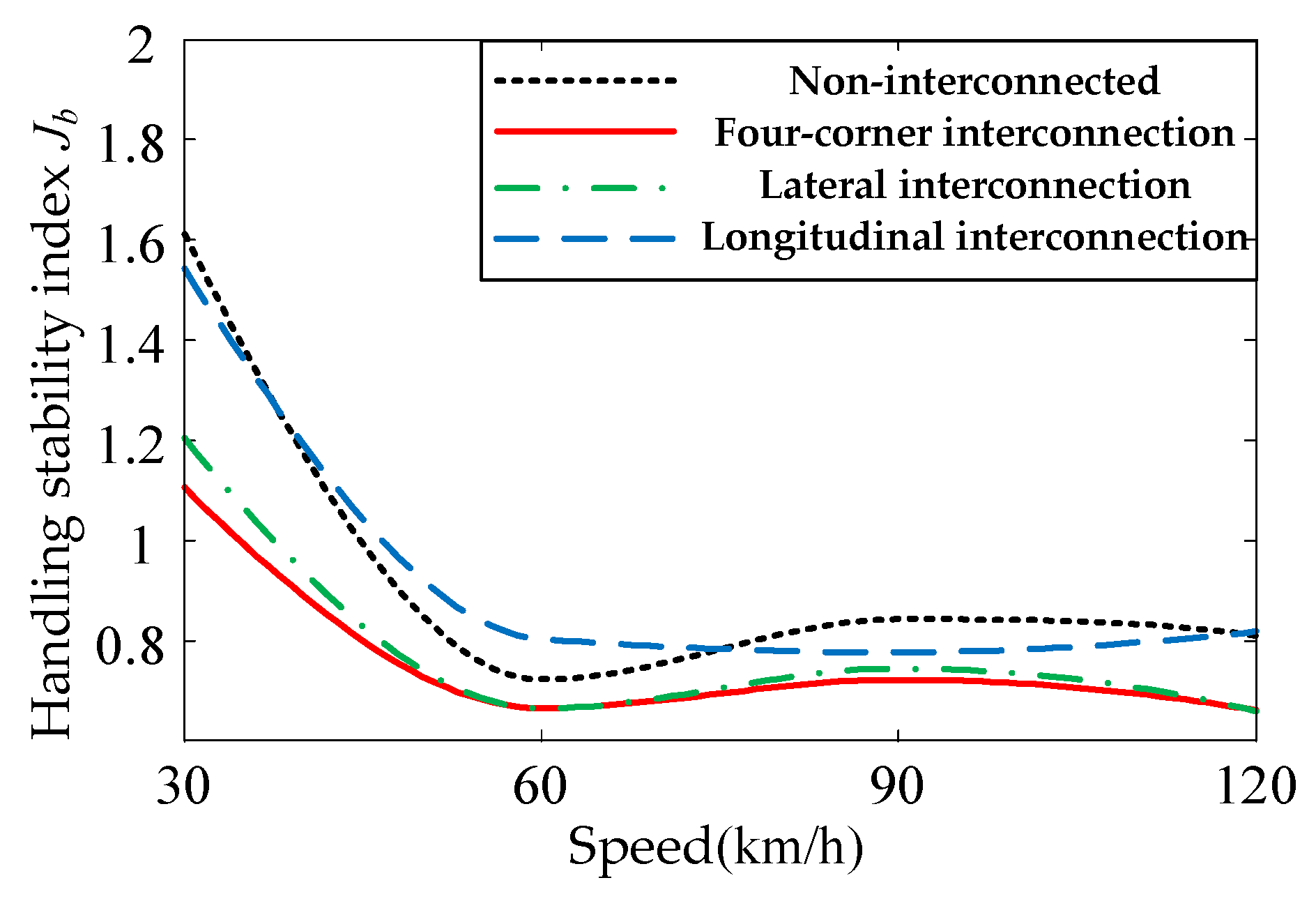
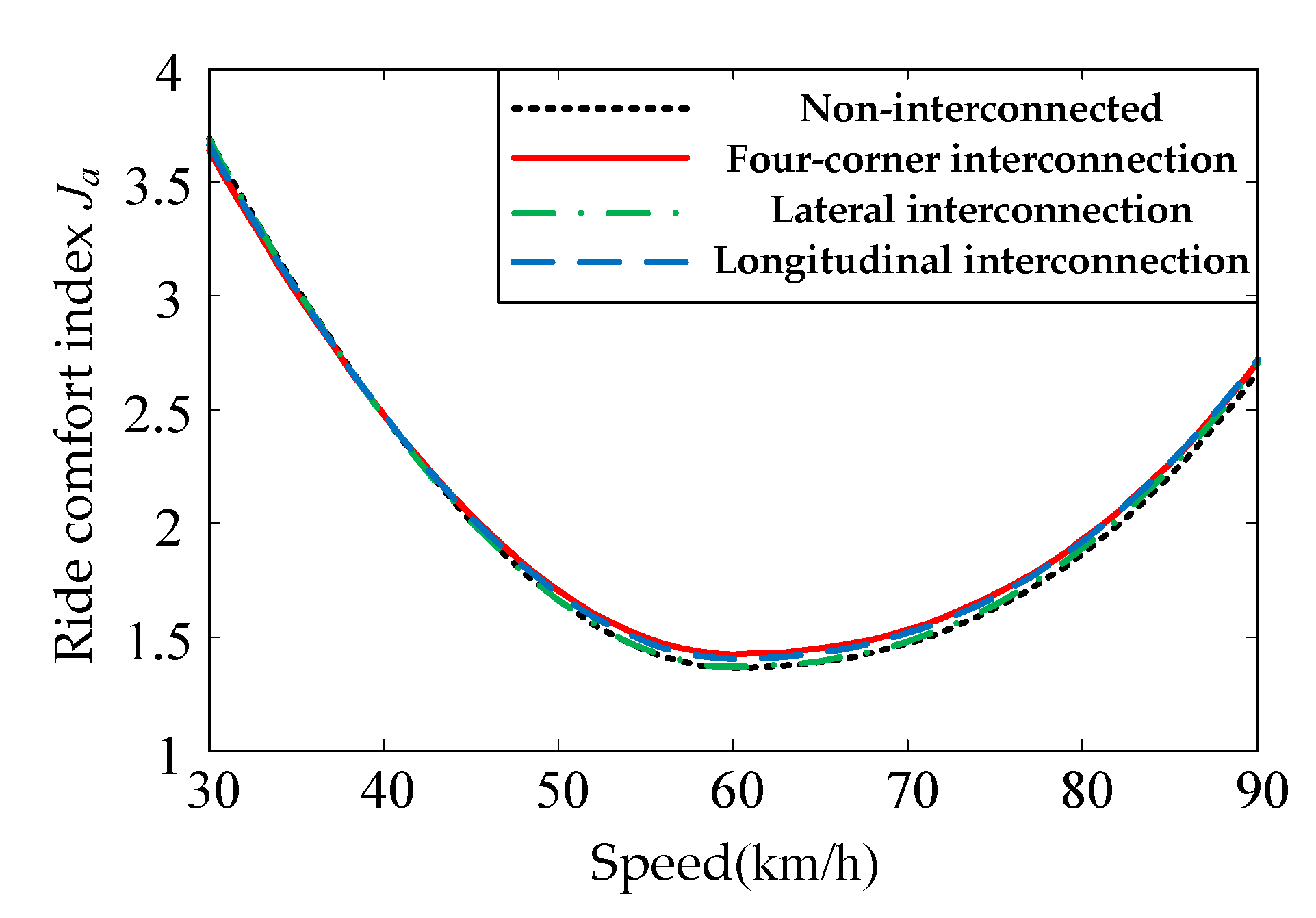
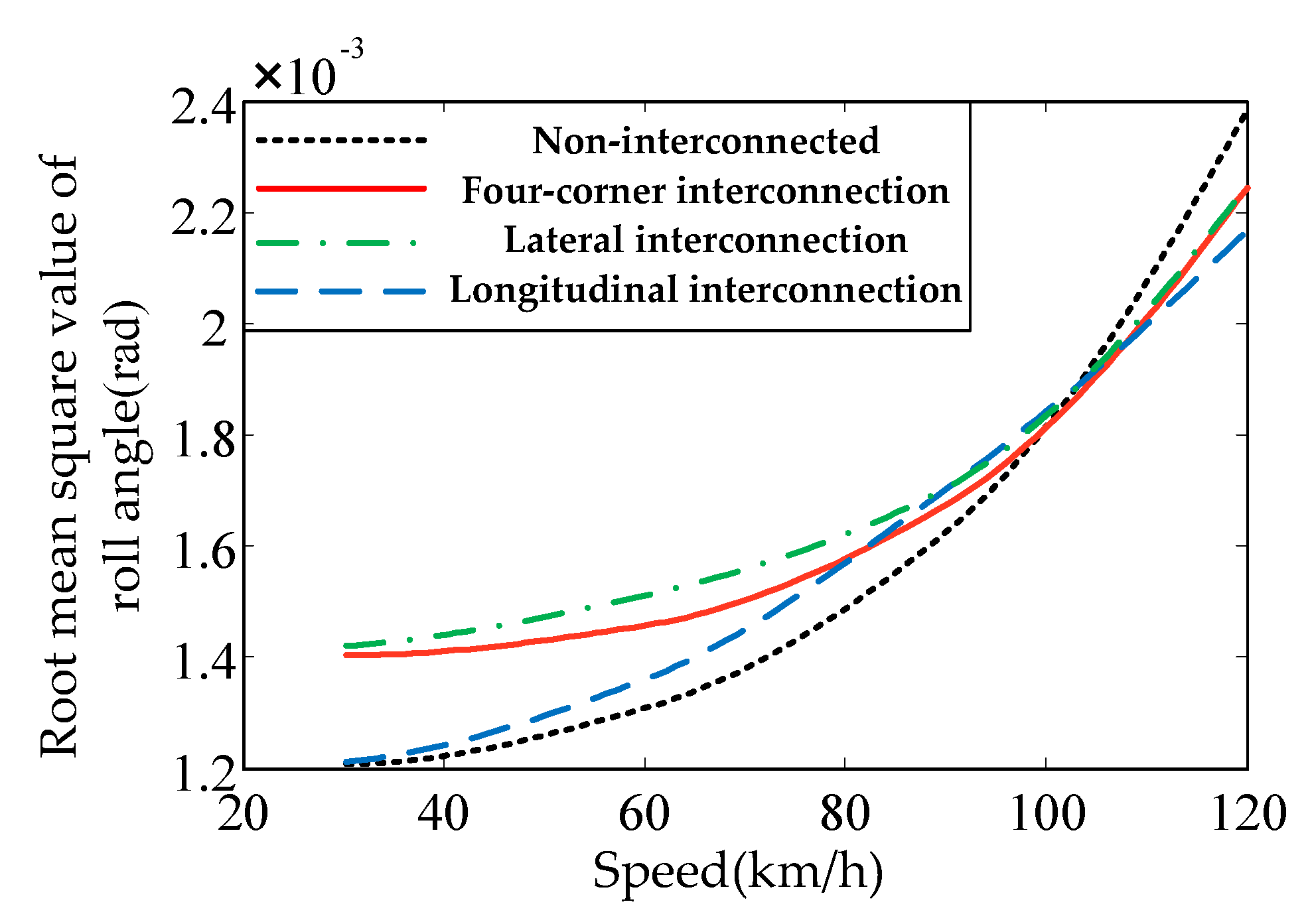
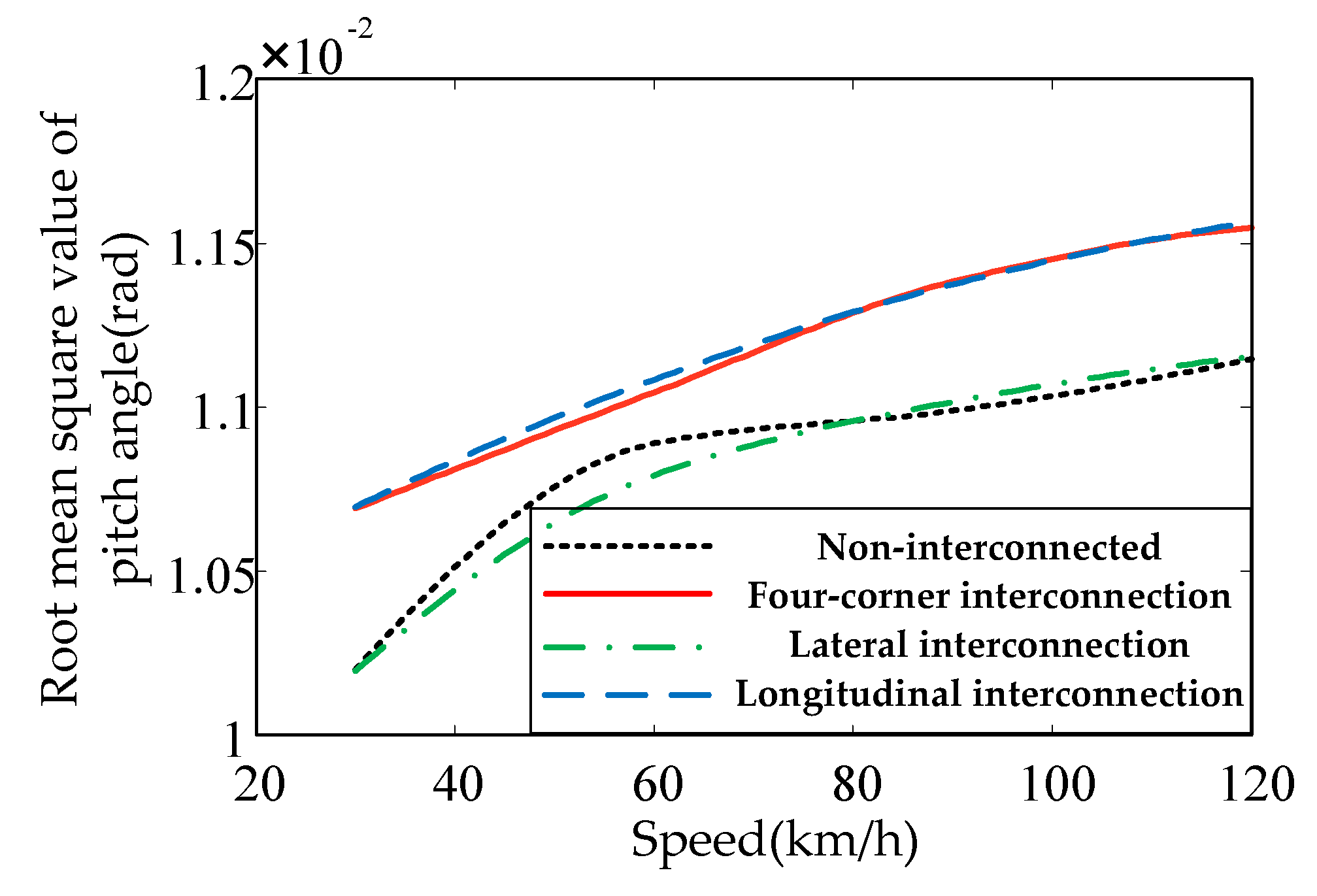
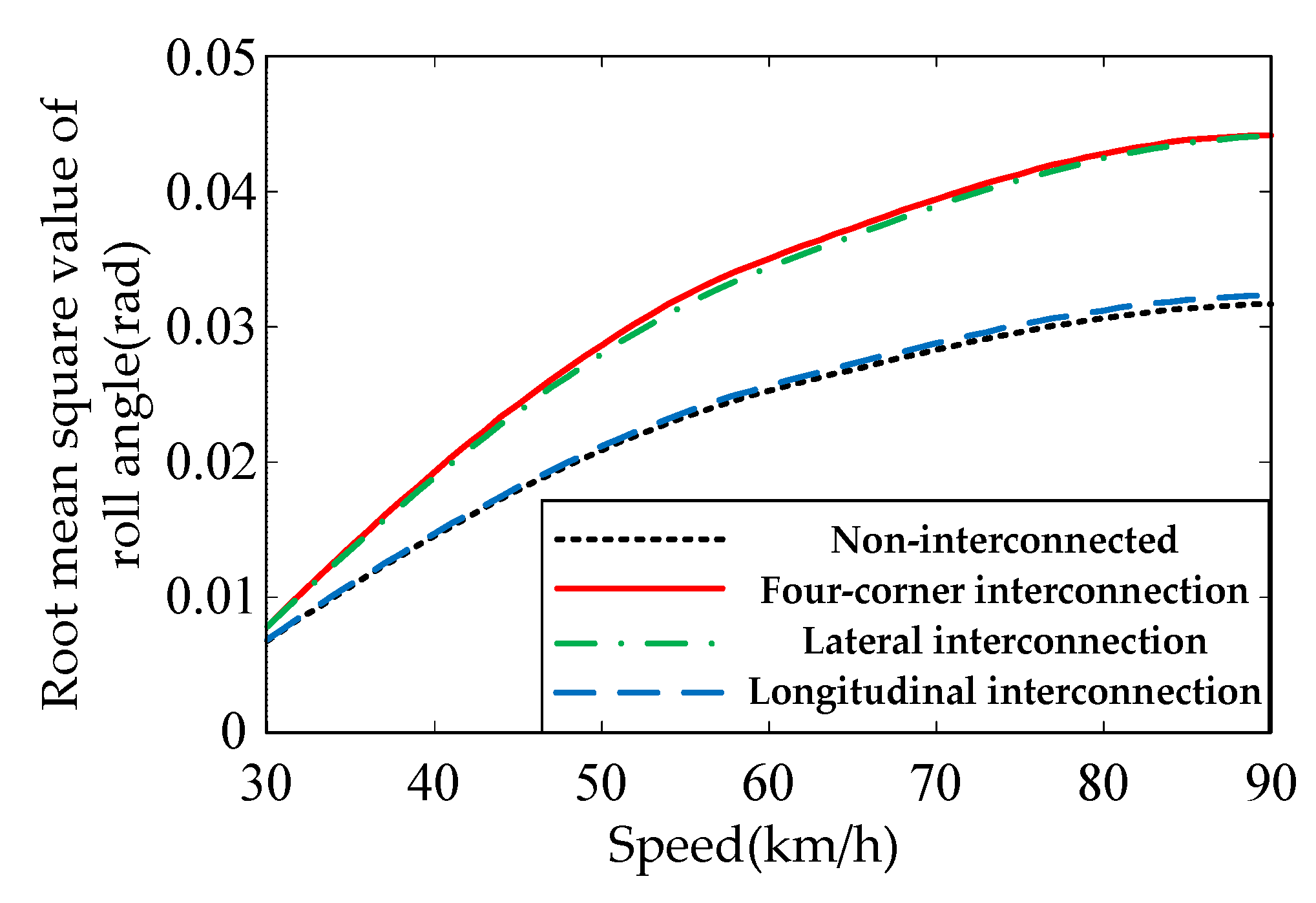
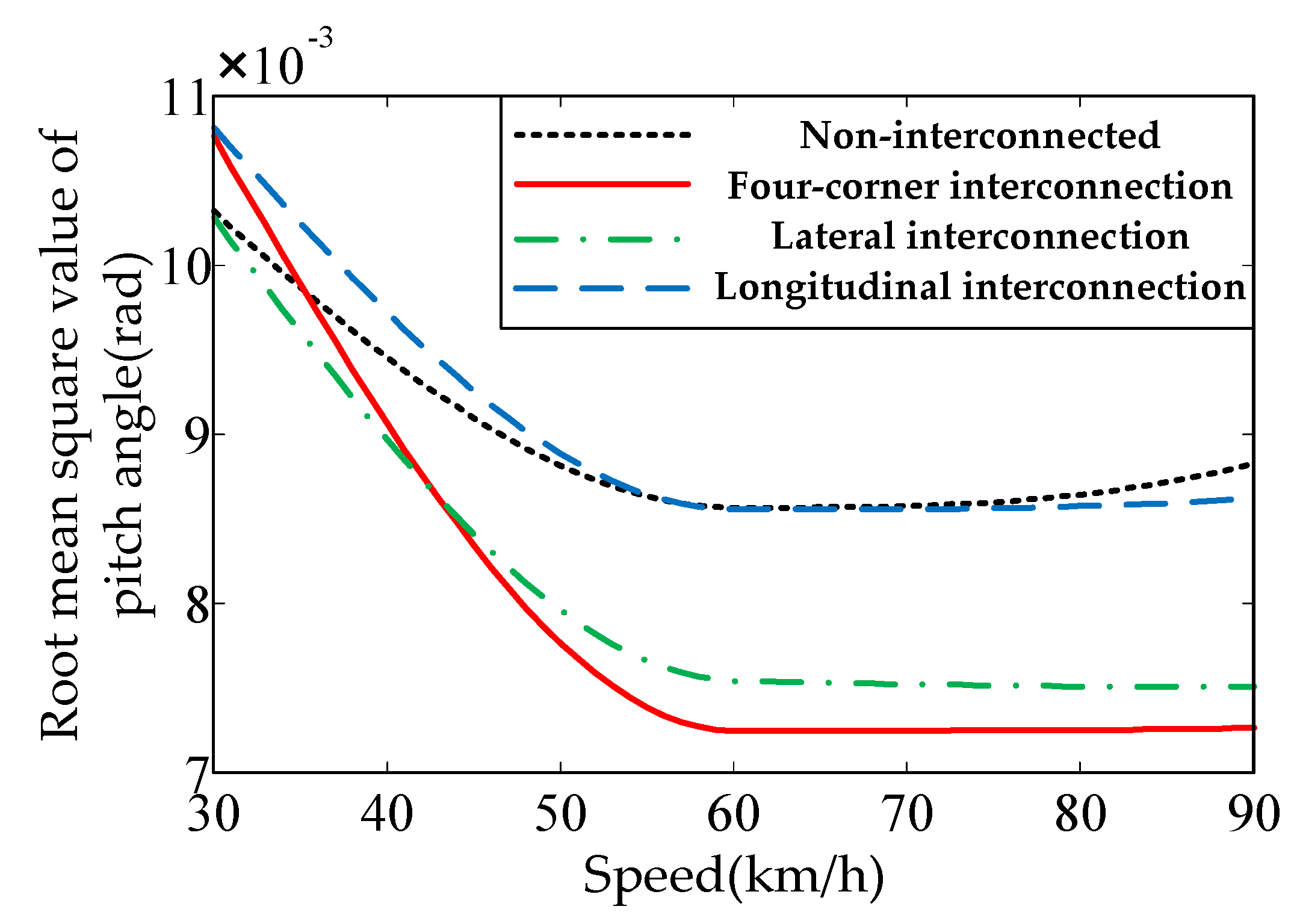
4.2.2. Analysis of Comprehensive Indicators under Different Interconnection Modes
4.2.3. Logic of Interconnection Modes Switching
4.3. Design of Damping Force Distribution Controller Based on Differential Game
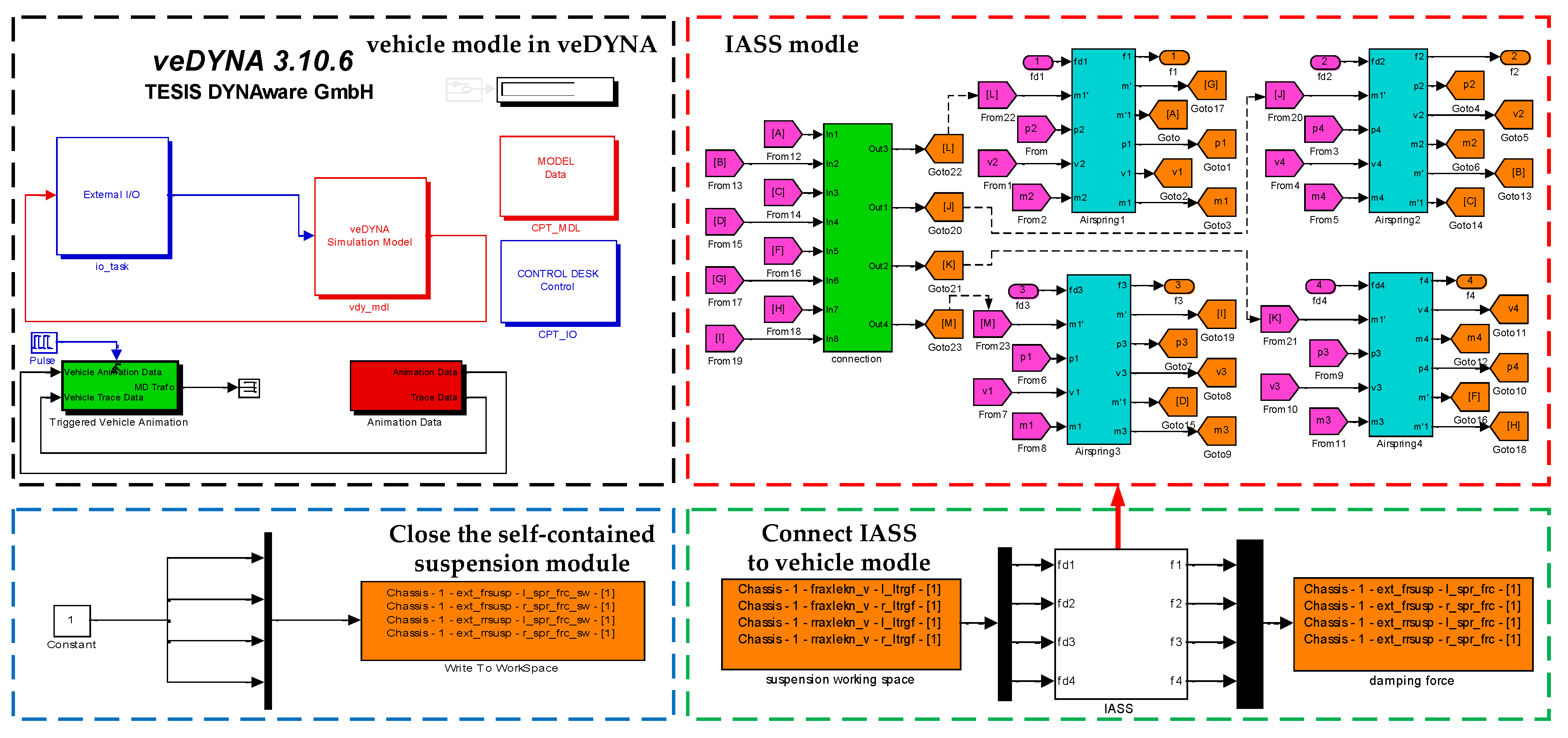
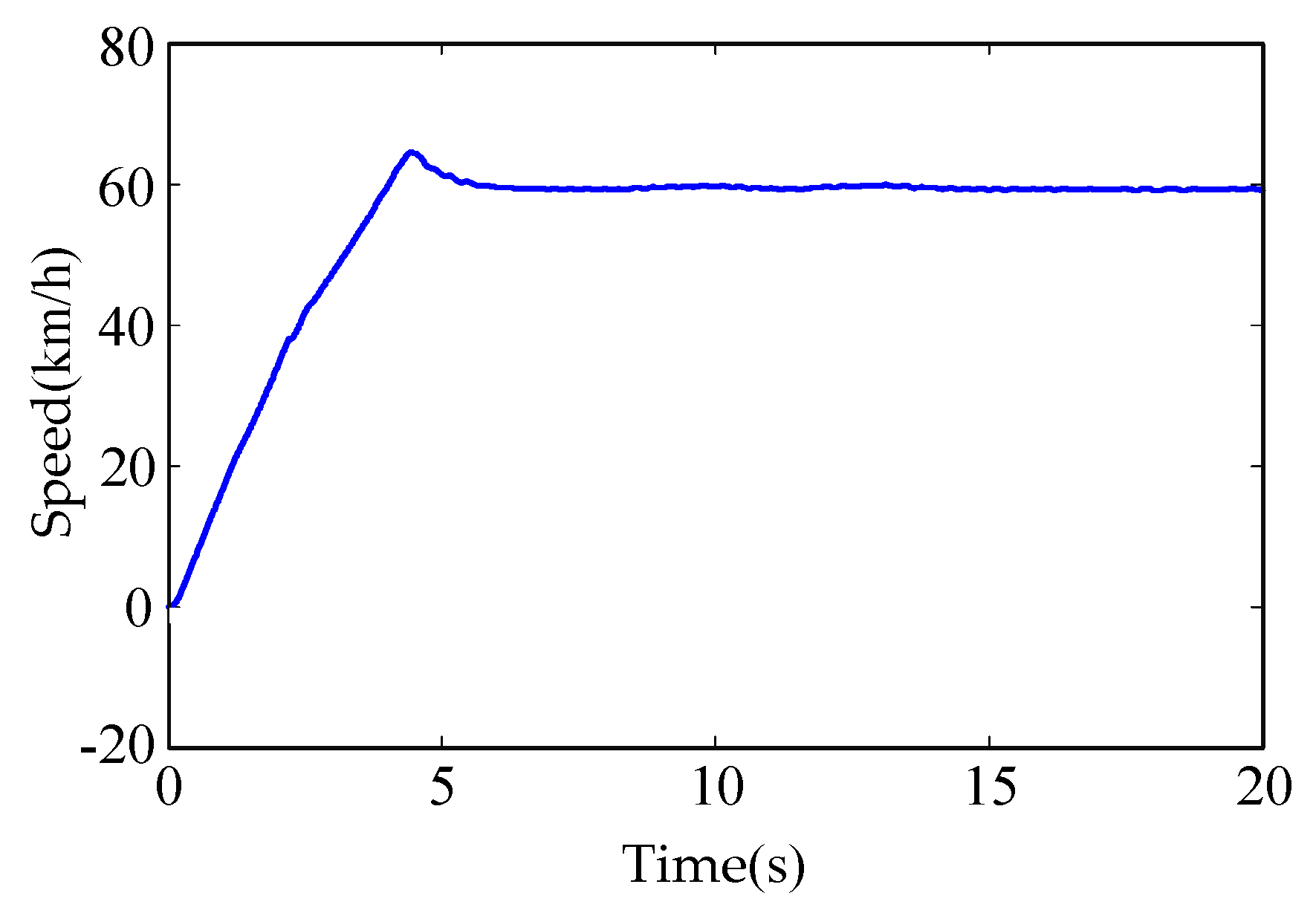
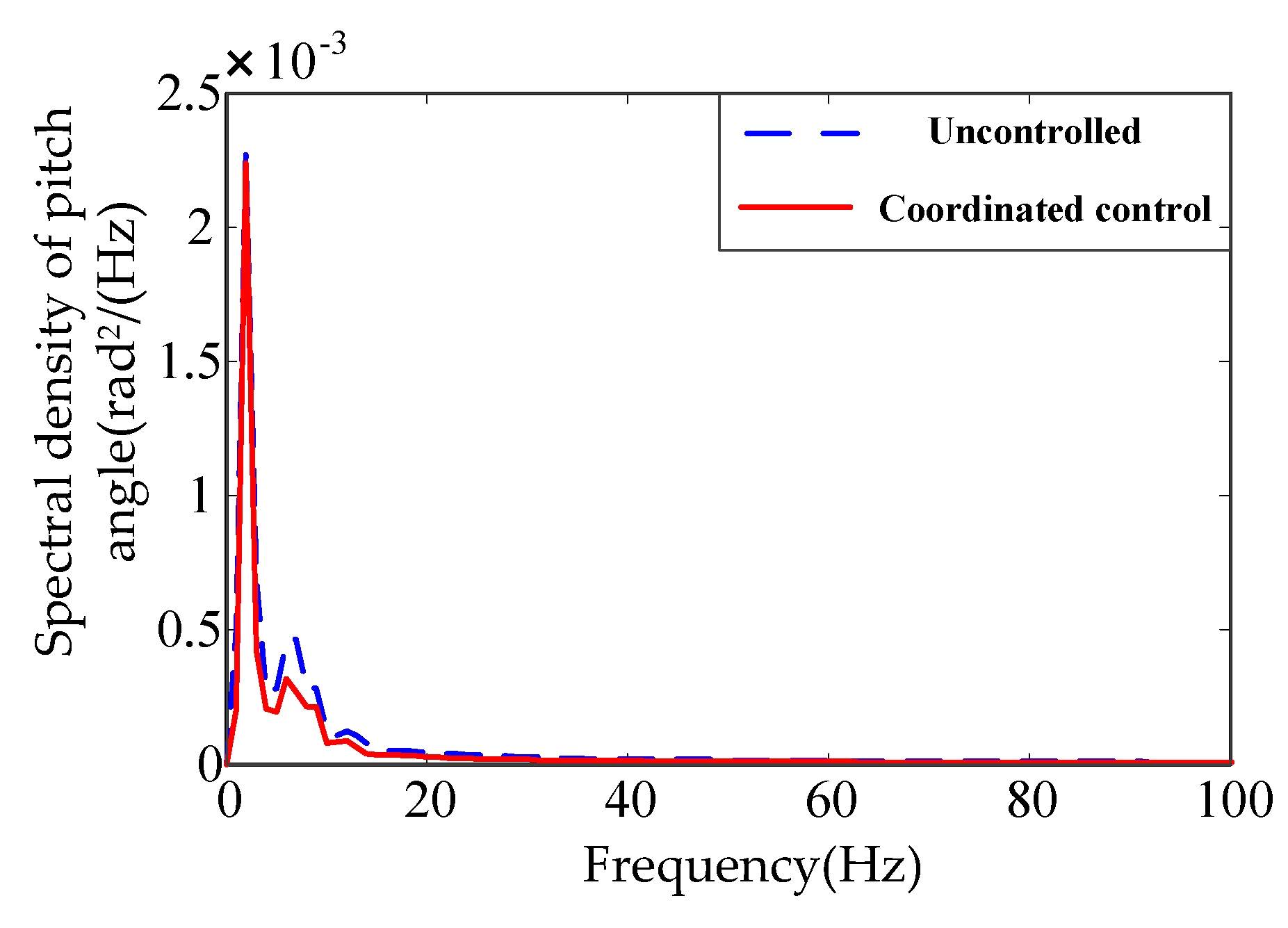
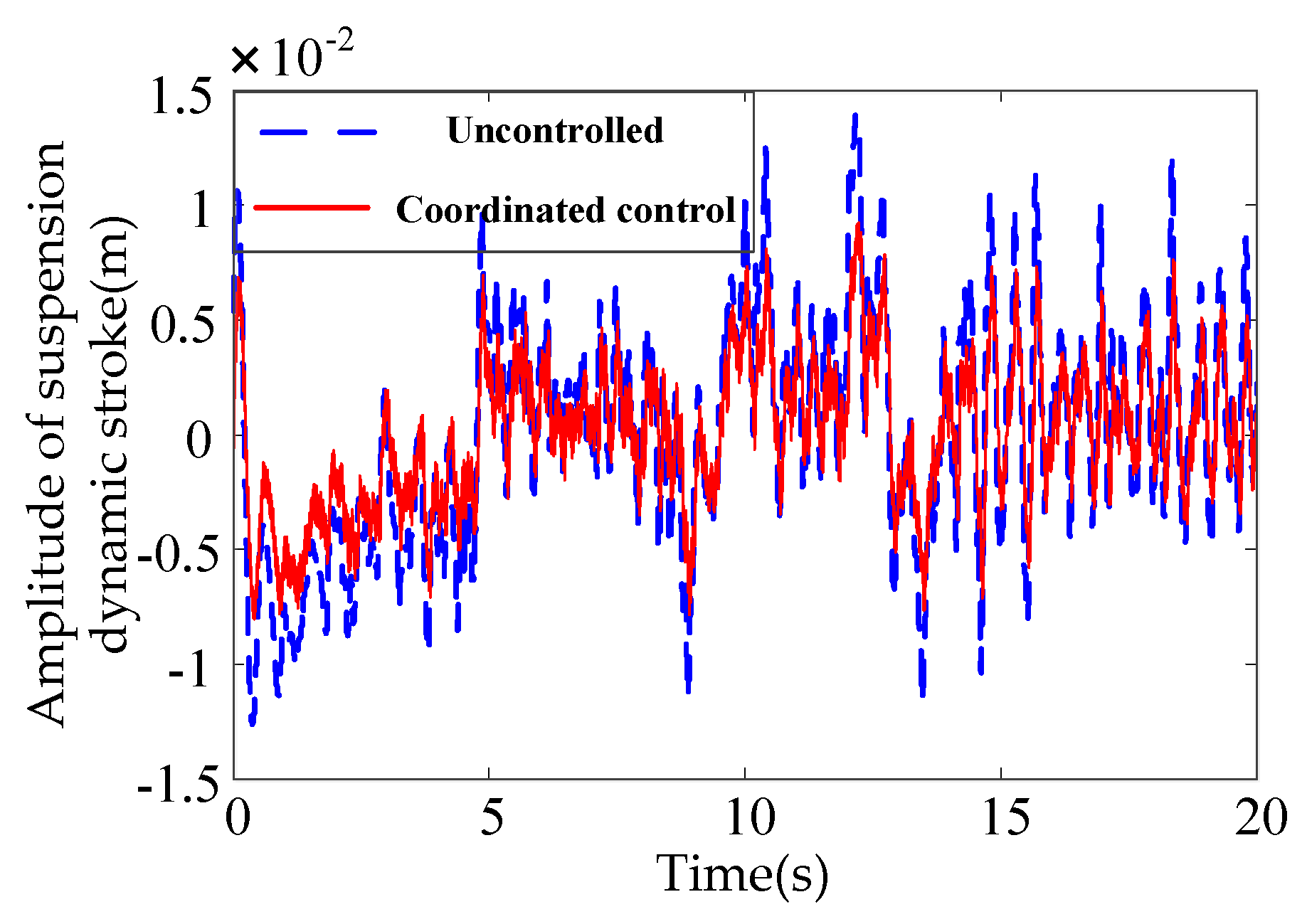
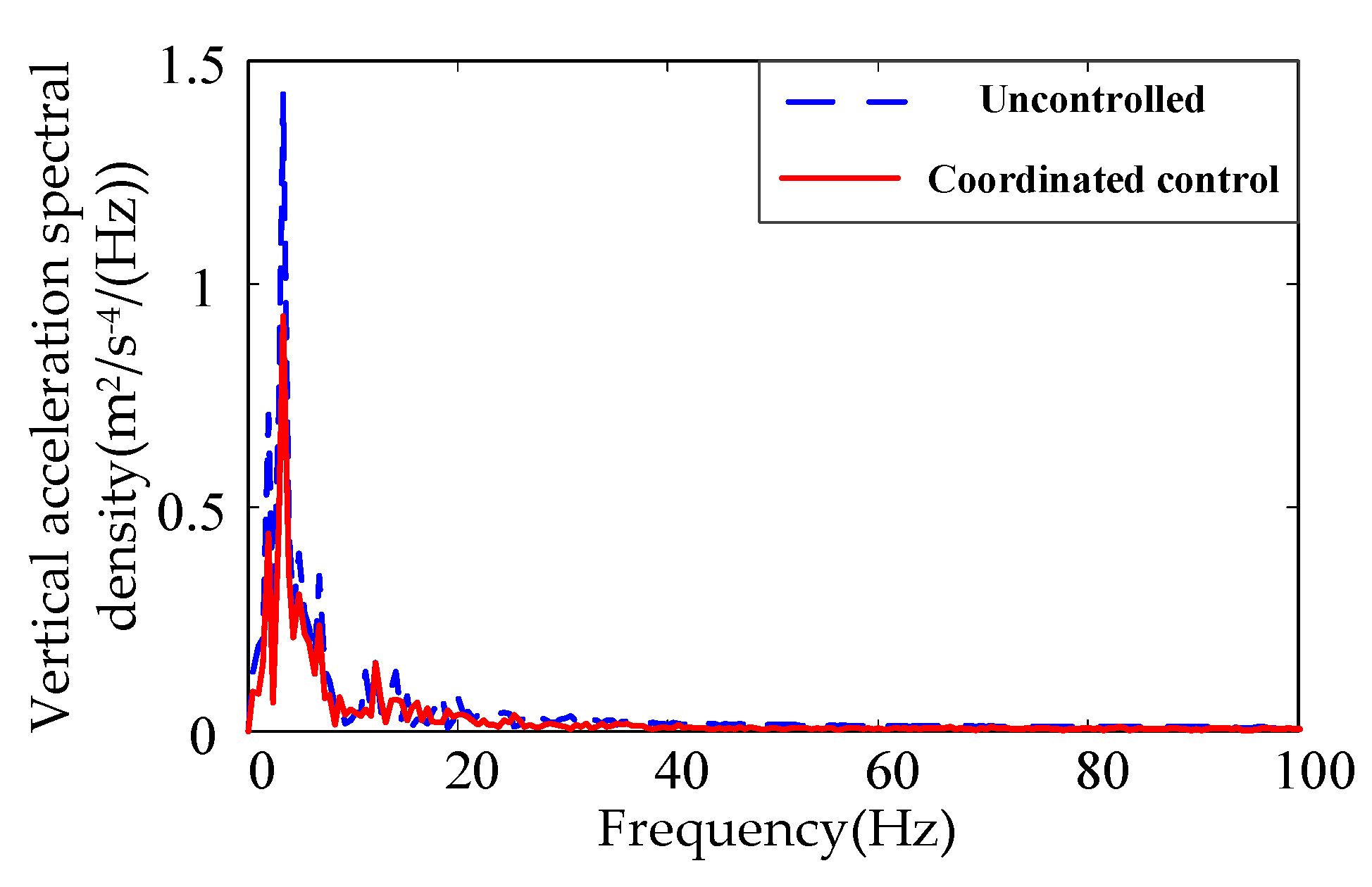
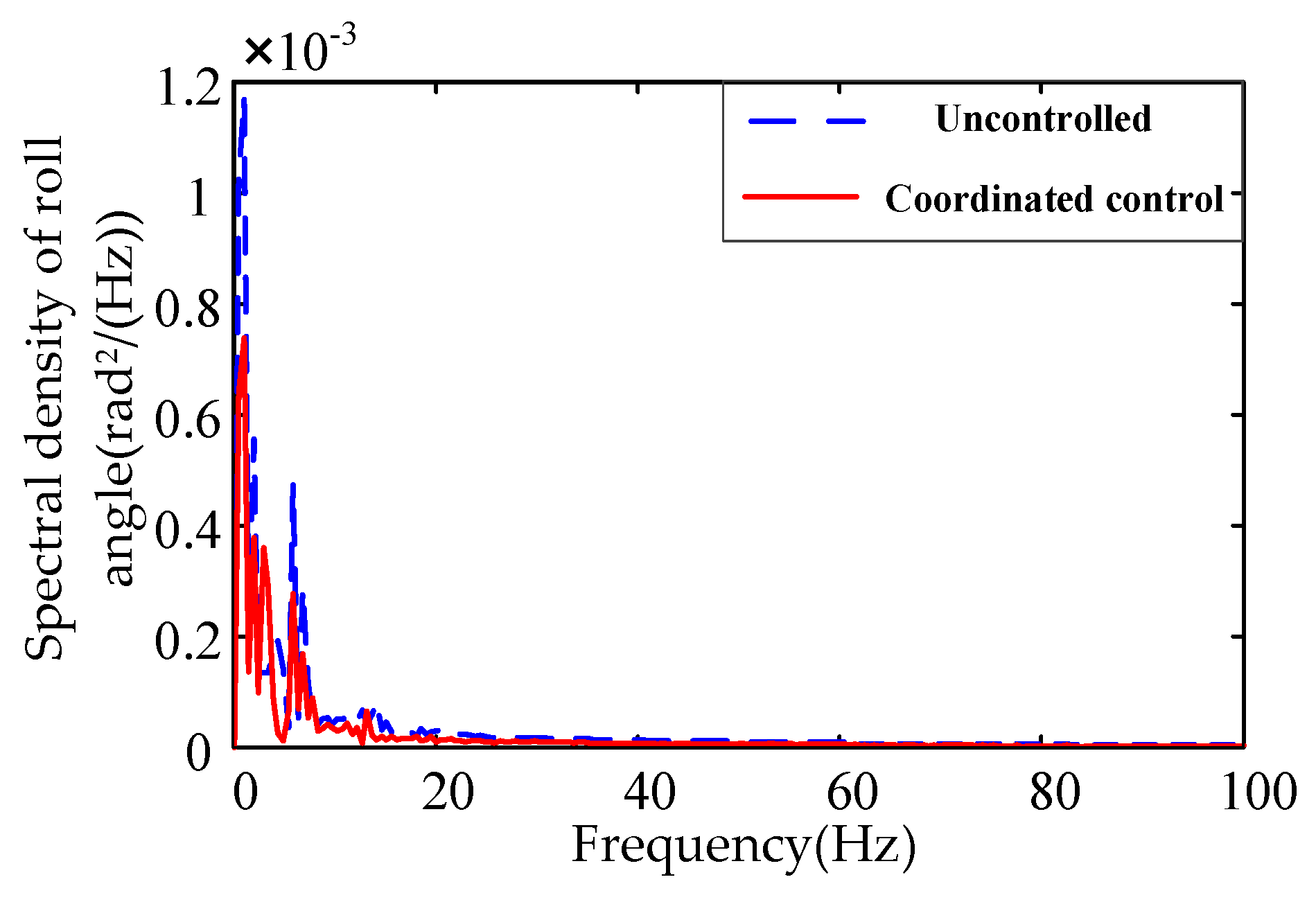
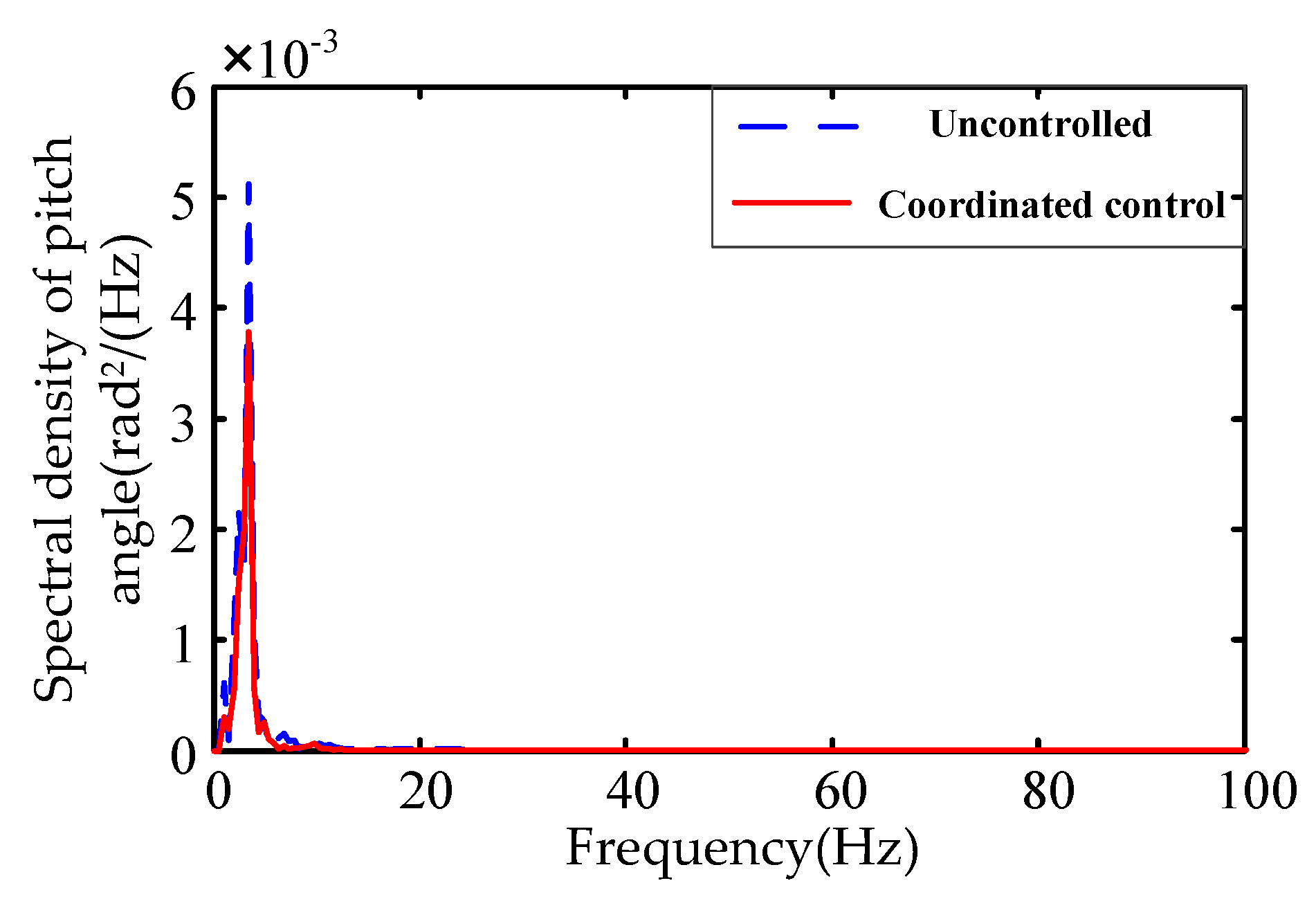
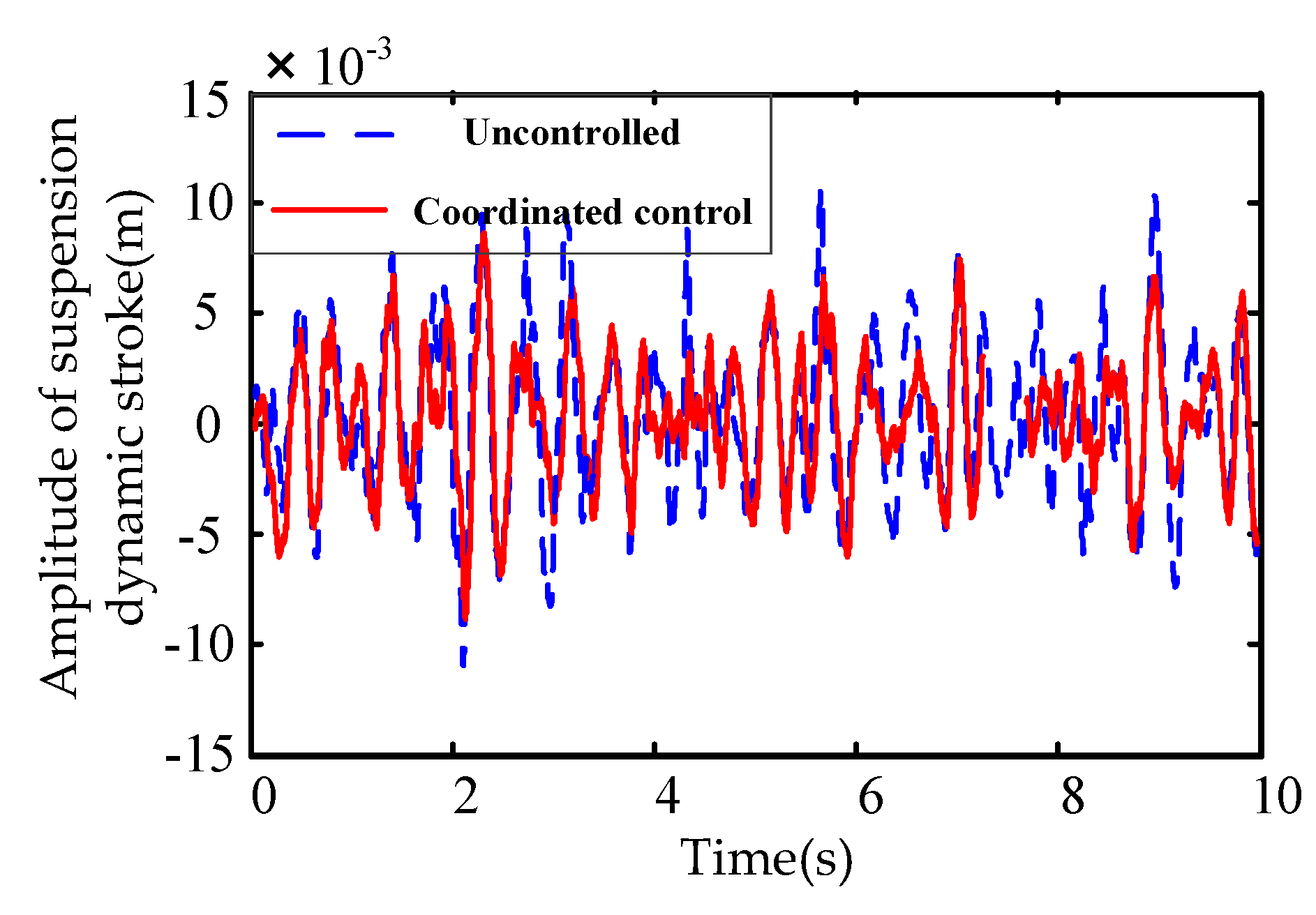
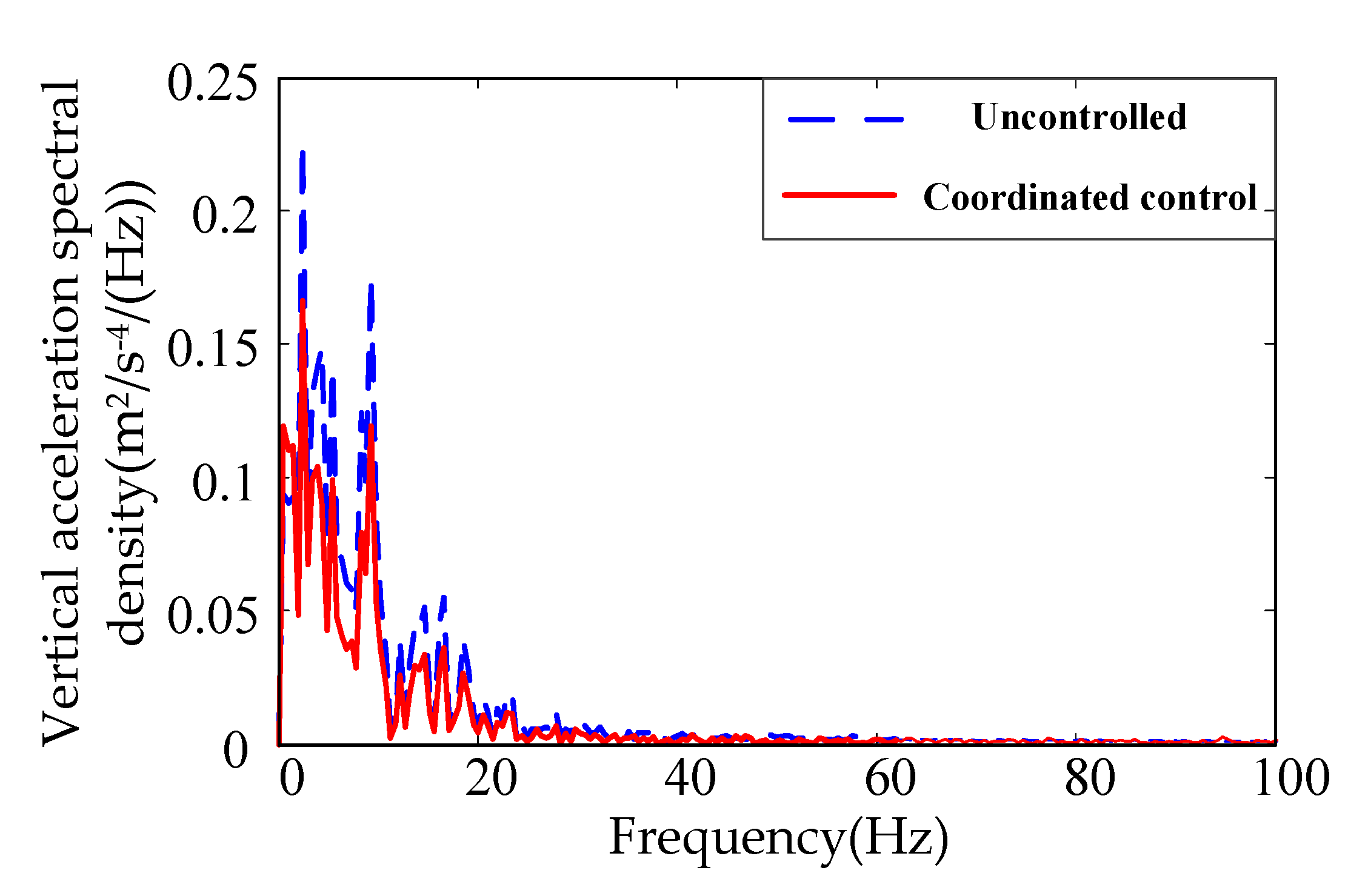
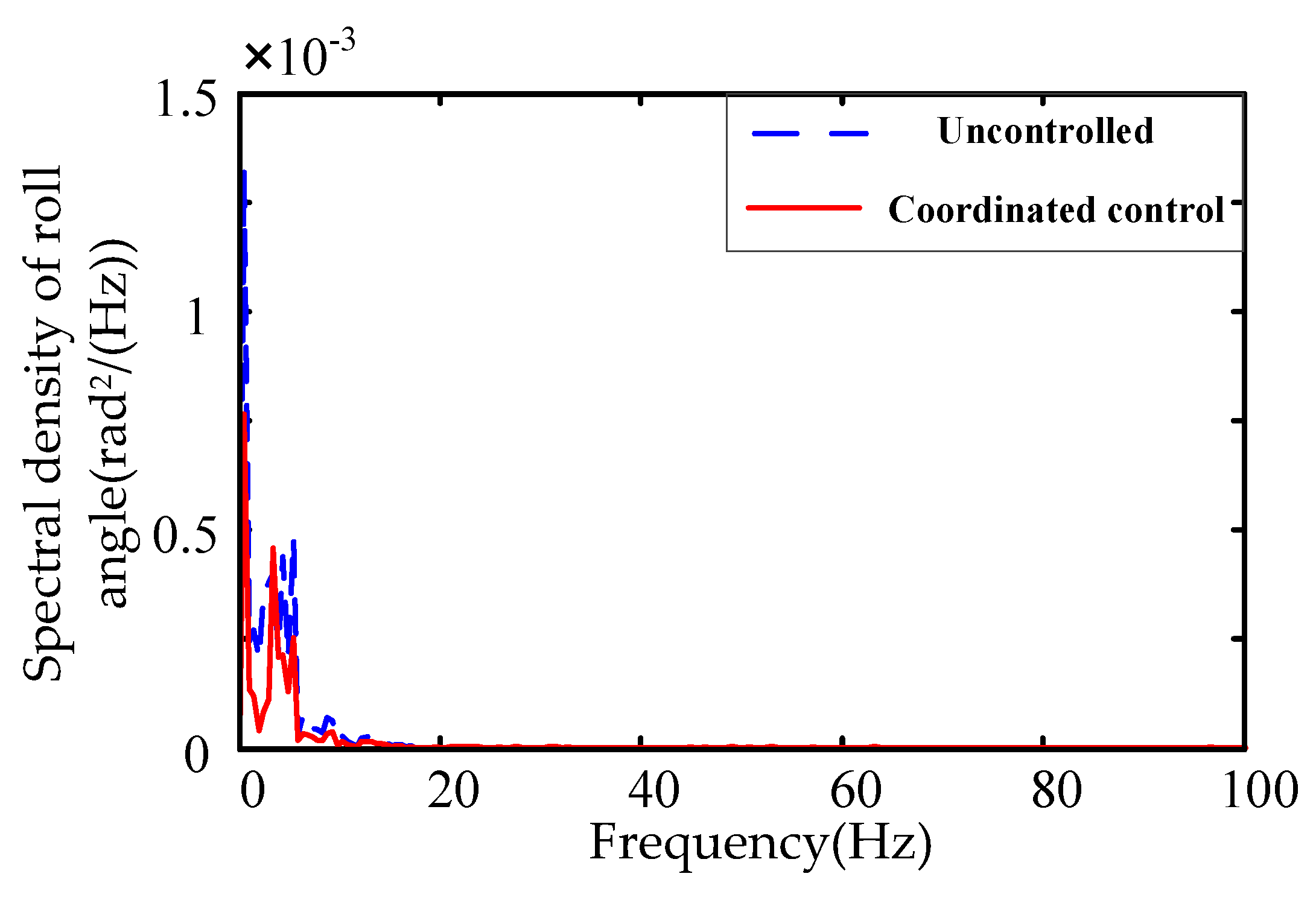
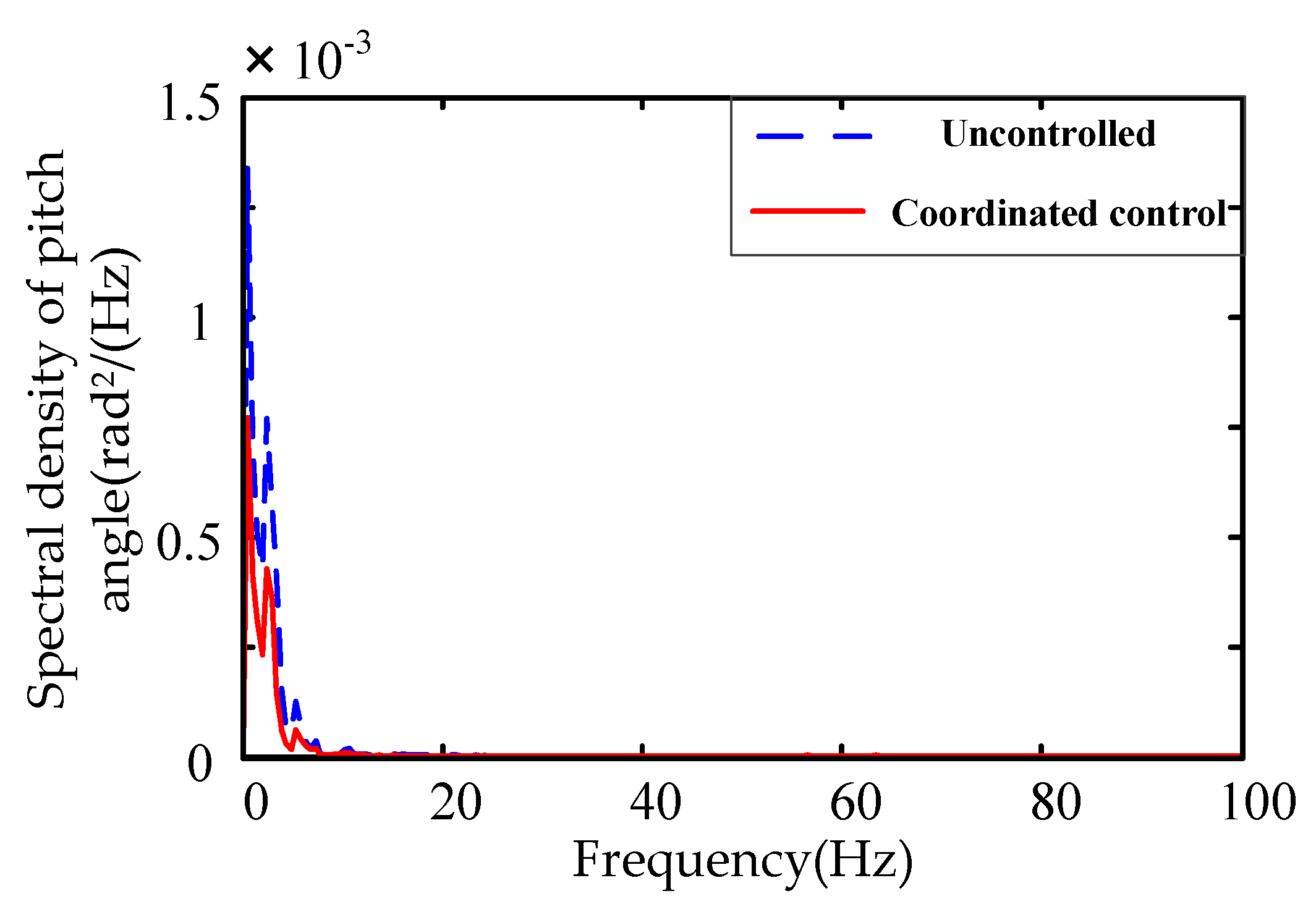
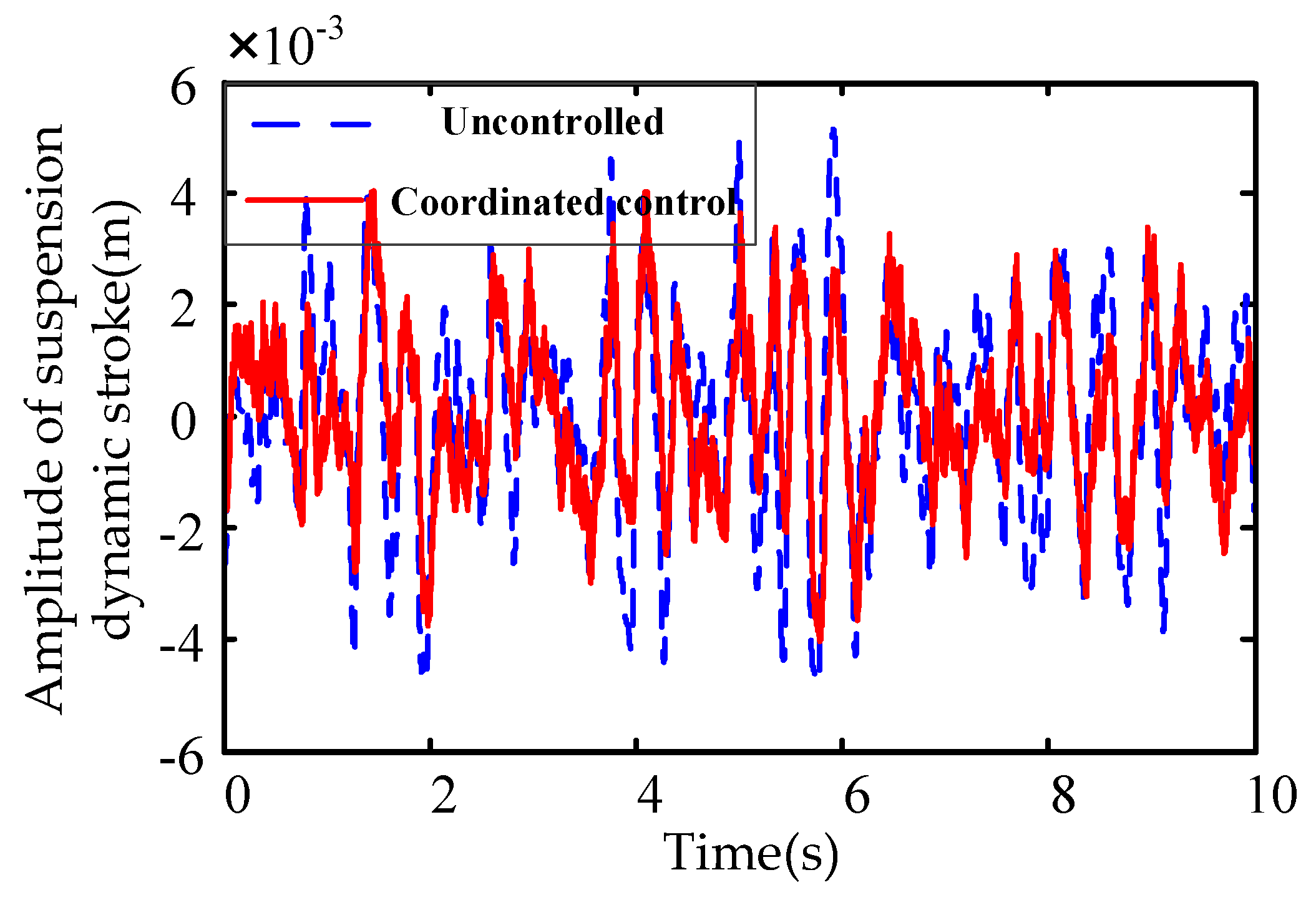
5. Simulation Analysis
6. Verification of Bench Test
6.1. Experiments under the Straight Condition of Standard-B Road Excitations
6.2. Experiments under the Steady-State Steering Condition of Standard-B Road Excitations
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kim, H.; Lee, H. Height and Leveling Control of Automotive Air Suspension System Using Sliding Mode Approach. IEEE Trans. Veh. Technol. 2011, 60, 2027–2041. [Google Scholar]
- Eskandary, K.P.; Khajepour, A.; Wong, A. Analysis and optimization of air suspension system with independent height and stiffness tuning. Int. J. Automot. Technol. 2016, 17, 807–816. [Google Scholar] [CrossRef]
- Davis, L. Altering heavy vehicle air suspension dynamic forces by modifying air lines. Int. J. Heavy Veh. Syst. 2011, 18, 1–17. [Google Scholar] [CrossRef]
- Li, Z.X.; Cui, Z.; Xu, X. Experimental Study on the Dynamic Performance of Pneumatically Interlinked Air Suspension. Sci. Tech. Eng. 2014, 14, 82–86. [Google Scholar]
- Jiang, H.; Yang, Y.F.; Wang, Y.J. Experimental study on height control and energy consumption characteristics of closed-loop air circuit interconnected air suspension system. J. Cent. South Univ. 2017, 48, 270–276. [Google Scholar]
- Chen, Y.K.; Huang, S.; Davis, L. Optimization of Geometric Parameters of Longitudinal-Connected Air Suspension Based on a Double-Loop Multi-Objective Particle Swarm Optimization Algorithm. Appl. Sci. 2018, 8, 1454. [Google Scholar] [CrossRef]
- Eskandary, P.K. Interconnected Air Suspensions with Independent Height and Stiffness Tuning. Master’s Thesis, University of Waterloo, Waterloo, ON, Canada, 2014. [Google Scholar]
- Range Rover. Purchasing a Range Rover Mark III/L322: Details and Assistance for Purchasing a Third Generation Range Rover [EB/OL]. Available online: http://www.rangerovers.net/researchl322.html (accessed on 7 April 2013).
- Jiang, H.B.; Ye, S.C.; Du, Y. Study on basic features of gas-liquid mechanical coupling suspension strut. Int. J. Veh. Des. 2016, 72, 88–105. [Google Scholar] [CrossRef]
- Zulkarnain, N.; Imaduddin, F.; Zamzuri, H. Application of an Active Anti-roll bar system for enhancing vehicle ride and handling. In Proceedings of the IEEE Colloquium on Humanities, Science and Engineering Research (CHUSER), Kota Kinabalu, Malaysia, 3–4 December 2012. [Google Scholar]
- Wang, D.Z.; Zhao, D.X.; Gong, M.D. Research on Robust Model Predictive Control for Electro-hydraulic Servo Active Suspension Systems. IEEE Access 2017, 6, 3231–3240. [Google Scholar] [CrossRef]
- Ahmadian, M. Magneto-rheological suspensions for improving ground vehicle’s ride comfort, stability, and handling. Veh. Syst. Dyn. 2017, 55, 1618–1642. [Google Scholar] [CrossRef]
- Wang, R.C.; Yu, F.; Shao, K. Design and Performance Analysis of Electromagnetic Suspension Based on In-wheel Motor Car. Trans. Chin. Soc. Agric. Mach. 2018, 49, 382–389. [Google Scholar]
- Zhao, Y.; Wang, L.; Yang, X. Study on the ride performance of a semi-active air suspension vehicle under complex models based on co-simulation. SAE Tech. Pap. 2015, 1, 615–624. [Google Scholar]
- Zeng, L.M. Coordinated Control of Vehicle Ride Comfort and Handing Stability Based on Active Suspension. Master’s Thesis, Hunan University, Changsha, China, 2017. [Google Scholar]
- Chiang, H.H.; Lee, L.W. Optimized Virtual Model Reference Control for Ride and Handling Performance Oriented Semiactive Suspension Systems. IEEE Trans. Veh. Technol. 2015, 68, 1679–1690. [Google Scholar]
- Chen, S.; Zong, C.F.; Liu, L.G. Co-simulation on the Coordinated Control of Ride Comfort and Handling Stability of Vehicles with Active Suspension. Automot. Eng. 2012, 34, 791–797. [Google Scholar]
- Bharali, J.; Buragohain, M. Design and performance analysis of Fuzzy LQR, Fuzzy PID and LQR controller for active suspension system using 3 Degree of Freedom quarter car model. In Proceedings of the 1st IEEE International Conference on Power Electronics, Intelligent Control, and Energy Systems (ICPEICES), Delhi, India, 4–6 July 2016. [Google Scholar]
- Chen, W.W.; Zhu, H. Coordinated Control of Vehicle Ride Comfort and Handling Stability Based on modes Identification. CJME 2011, 47, 121–129. [Google Scholar]
- Mohsenian-Rad, A.; Wong, V.W.S.; Jatskevich, J. Autonomous Demand-Side Management Based on Game-Theoretic Energy Consumption Scheduling for the Future Smart Grid. IEEE Trans. Smart Grid 2010, 1, 320–331. [Google Scholar]
- Juan, P.; Santiago, Z. Wireless Networks under a Backoff Attack: A Game Theoretical Perspective. Sensors 2018, 18, 404–422. [Google Scholar]
- Na, X.; Cole, D.J. Linear quadratic game and non-cooperative predictive methods for potential application to modelling driver-AFS interactive steering control. Veh. Syst. Dyn. 2013, 51, 165–198. [Google Scholar] [CrossRef]
- Segal, A.; Miloh, T. A new 3-D pursuit-evasion differential game between two bank-to-turn airborne vehicles. Optim. Control Appl. Meth. 2015, 20, 223–234. [Google Scholar]
- Wang, H.W.; Yu, X.C.; Song, H.B. A Global Optimal Path Planning and Controller Design Algorithm for Intelligent Vehicles. Mob. Netw. Appl. 2016, 23, 1165–1178. [Google Scholar] [CrossRef]
- Wolf-Monheim, M.; Schumacher, M.; Frantzen, F. Interconnected air suspension systems: The influence on ride comfort in testing and simulation. Atzautotechnology 2009, 9, 58–61. [Google Scholar]
- Li, F.; Fu, M.H.; Huang, Y.H. Analysis of Dynamic Characteristic Parameter of Air Spring. J. Southwest Jiaotong Univ. 2003, 38, 276–281. [Google Scholar]
- Li, Z.X.; Li, M.; Guo, J.W. Novel Test Platform and Performance Test Study on Air Spring with Auxiliary Chamber. CJME 2012, 48, 98–102. [Google Scholar]
- Li, L.Y. The Numerical Simulation Researches of Comprehensive Evaluation Methods’ Performances. Master’s Thesis, Northeastern University, Shenyang, China, 2010. [Google Scholar]
- Engwerda, J.C.; Salmah. Feedback Nash Equilibria for Linear Quadratic Descriptor Differential Games. Automatica 2012, 48, 625–631. [Google Scholar]
- Reddy, P.; Zaccour, G. Feedback Nash Equilibria in Linear-Quadratic Difference Games with Constraints. IEEE Trans. Autom. Control 2017, 62, 590–604. [Google Scholar]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Driving Mod | Major Contradictory Judgment | Secondary Contradictory Judgment | Interconnection Mode |
|---|---|---|---|
| Straight condition (|δ| < 10°) | Ja < 1.23, Jb ≥ 0.89 | θb ≥ 1.12 × 10−2, ϕb ≥ 2 × 10−3 | Non-interconnected |
| θb ≥ 1.12 × 10−2, ϕb < 2 × 10−3 | Lateral interconnection | ||
| θb < 1.12 × 10−2, ϕb ≥ 2 × 10−3 | Longitudinal interconnection | ||
| θb < 1.12 × 10−2, ϕb < 2 × 10−3 | Four-corner interconnection | ||
| Other | Ja | Four-corner interconnection | |
| Steering running (|δ| ≥ 10°) | Ja ≥ 2.59, Jb ≥ 1.37 | θb < 9.3 × 10−3, ϕb < 1.65 × 10−2 | Longitudinal interconnection |
| Ja ≥ 2.59, Jb < 1.37 | Ja | Longitudinal interconnection | |
| Ja < 2.59, Jb ≥ 1.37 | θb < 9.3 × 10−3, ϕb < 1.65 × 10−2 | Longitudinal interconnection | |
| Ja < 2.59, Jb < 1.37 | θb < 9.3 × 10−3, ϕb < 1.65 × 10−2 | Longitudinal interconnection | |
| Other | θb, ϕb | Non-interconnected |
| Parameter | Value | Unit |
|---|---|---|
| Body quality | 2140 | kg |
| Unsprung mass | 200 | kg |
| Roll moment of inertia | 589 | kg∙m2 |
| Pitch moment of inertia | 3784 | kg∙m2 |
| Front wheel tread | 1.51 | m |
| Rear wheel tread | 1.51 | m |
| Distance from body centroid to front axle | 1.42 | m |
| Distance from body centroid to rear axle | 1.32 | m |
| Torsional stiffness of front lateral stabilizer | 2400 | N∙m |
| Torsional stiffness of rear lateral stabilizer | 1600 | N∙m |
| Damping coefficient of front shock absorber | 2800 | N∙s/m |
| Damping coefficient of rear shock absorber | 2800 | N∙s/m |
| Inside diameter of interconnected pipeline | 10 | mm |
| Length of lateral connecting pipelines | 1.7 | m |
| Length of longitudinal connecting pipelines | 2.57 | m |
| Tire stiffness | 250 | kN/m |
| RMS of Indicators | Uncontrolled Traditional Suspension | IASS with Coordinated Control | Improvement Rate |
|---|---|---|---|
| RMS of vertical acceleration (m/s2) | 1.2198 | 0.9963 | 18.32% |
| RMS of roll angle (rad) | 0.0013 | 0.0012 | 8.34% |
| RMS of pitch angle (rad) | 0.0109 | 0.0107 | 1.83% |
| Front left dynamic stroke (m) | 0.0490 | 0.0439 | 10.40% |
| Front right dynamic stroke (m) | 0.0494 | 0.0435 | 11.94% |
| Rear left dynamic stroke (m) | 0.0503 | 0.0446 | 11.33% |
| Rear right dynamic stroke (m) | 0.0507 | 0.0443 | 12.62% |
| RMS of Indicators | Non-Interconnected Suspension | IASS with Coordinated Control | Improvement Rate |
|---|---|---|---|
| RMS of vertical acceleration (m/s2) | 0.3839 | 0.3369 | 12.24% |
| RMS of roll angle (rad) | 0.0158 | 0.0156 | 1.26% |
| RMS of pitch angle (rad) | 0.0099 | 0.0096 | 3.03% |
| Left front dynamic stroke (m) | 0.0427 | 0.0412 | 3.51% |
| Right front dynamic stroke (m) | 0.0551 | 0.0548 | 5.44% |
| Left rear dynamic stroke (m) | 0.0469 | 0.0451 | 3.83% |
| Right rear dynamic stroke (m) | 0.0541 | 0.0528 | 2.41% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, L.; Lin, Y.; Geng, G.; Li, Z.; Jiang, H. Research on Switching Interconnection Modes and Game Control of Interconnected Air Suspension. Energies 2019, 12, 3218. https://doi.org/10.3390/en12173218
Sun L, Lin Y, Geng G, Li Z, Jiang H. Research on Switching Interconnection Modes and Game Control of Interconnected Air Suspension. Energies. 2019; 12(17):3218. https://doi.org/10.3390/en12173218
Chicago/Turabian StyleSun, Liqin, Yong Lin, Guoqing Geng, Zhongxing Li, and Haobin Jiang. 2019. "Research on Switching Interconnection Modes and Game Control of Interconnected Air Suspension" Energies 12, no. 17: 3218. https://doi.org/10.3390/en12173218
APA StyleSun, L., Lin, Y., Geng, G., Li, Z., & Jiang, H. (2019). Research on Switching Interconnection Modes and Game Control of Interconnected Air Suspension. Energies, 12(17), 3218. https://doi.org/10.3390/en12173218