Development of Global Optimization Algorithm for Series-Parallel PHEV Energy Management Strategy Based on Radau Pseudospectral Knotting Method


Abstract
:1. Introduction
2. Dynamic Model for the Series-Parallel PHEV
2.1. Engine Model
2.2. ISG Motor Model
2.3. Tracking Motor Model
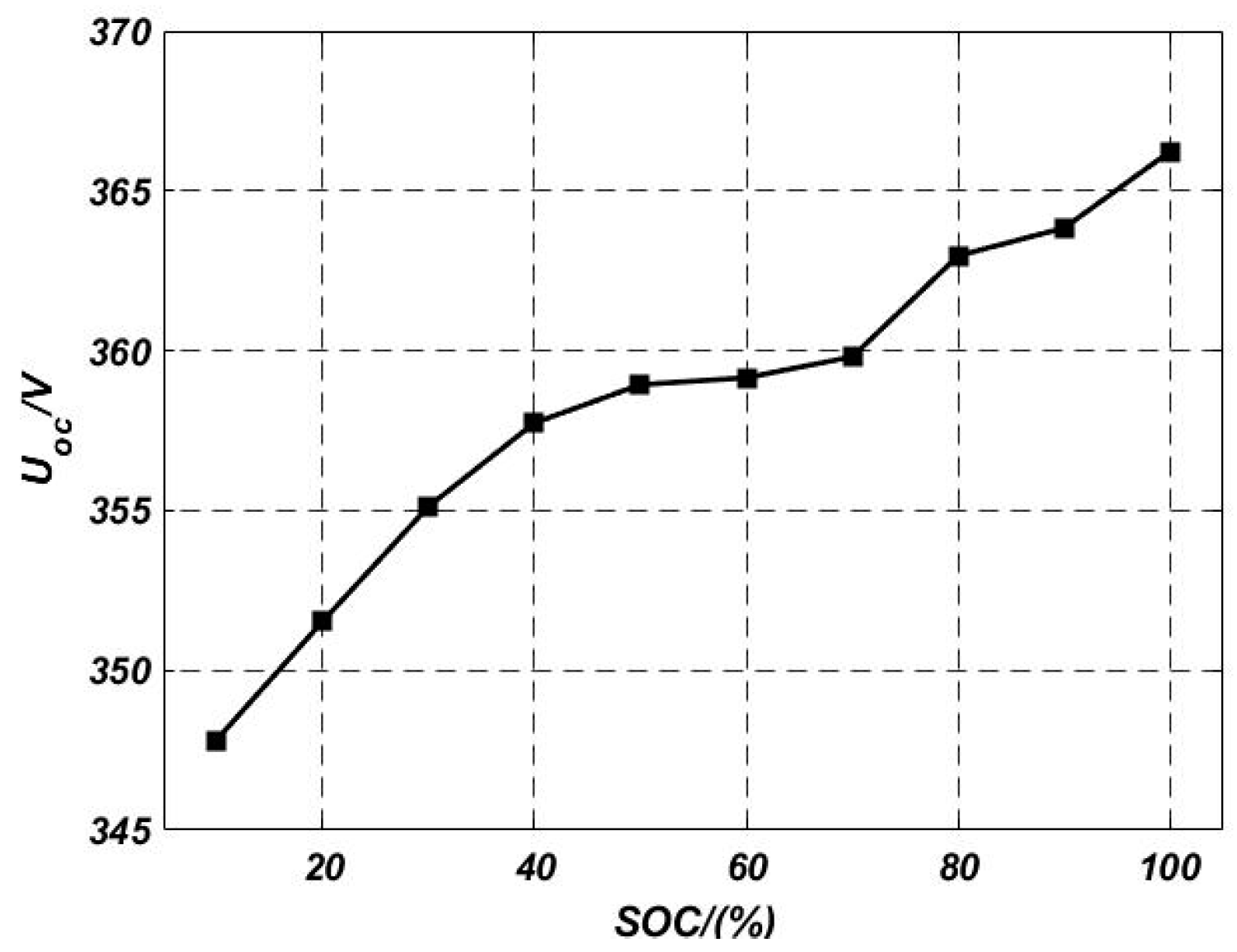
2.4. Battery Model
2.5. Clutch Model
2.6. Longitudinal Dynamic Model of whole Vehicle
2.7. Summary
3. Optimal Control Problem of Series-Parallel PHEV Energy Management Strategy
3.1. Performance Index
3.2. State Equation
3.3. Constraints
4. PHEV Global Optimization Algorithm Based on RPKM
4.1. Stage Division Principle
4.2. Numerical Solution of RPKM
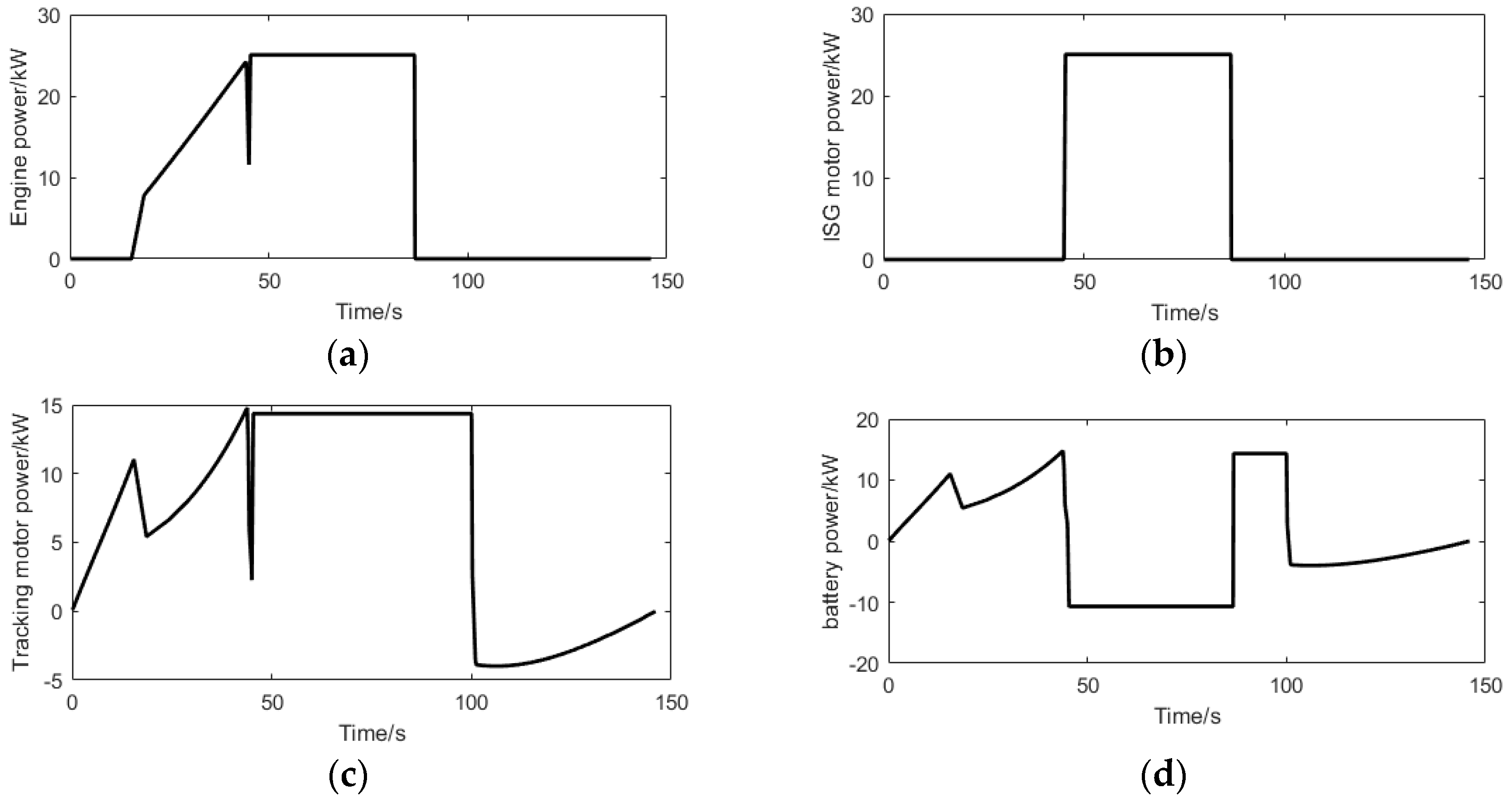
4.3. Result Analysis
4.4. Error Analysis
5. Bi-Level Nested Component-sizing Method Based on GA and RPKM
5.1. Description of the Component-Sizing Problem
5.2. Solution for Bi-Level Nested Component-Sizing Method
- The optimization variables of the PHEV parameter optimization problem were converted into individuals in the genetic space, and then a group of initial populations was randomly generated in the feasible domain of the problem.
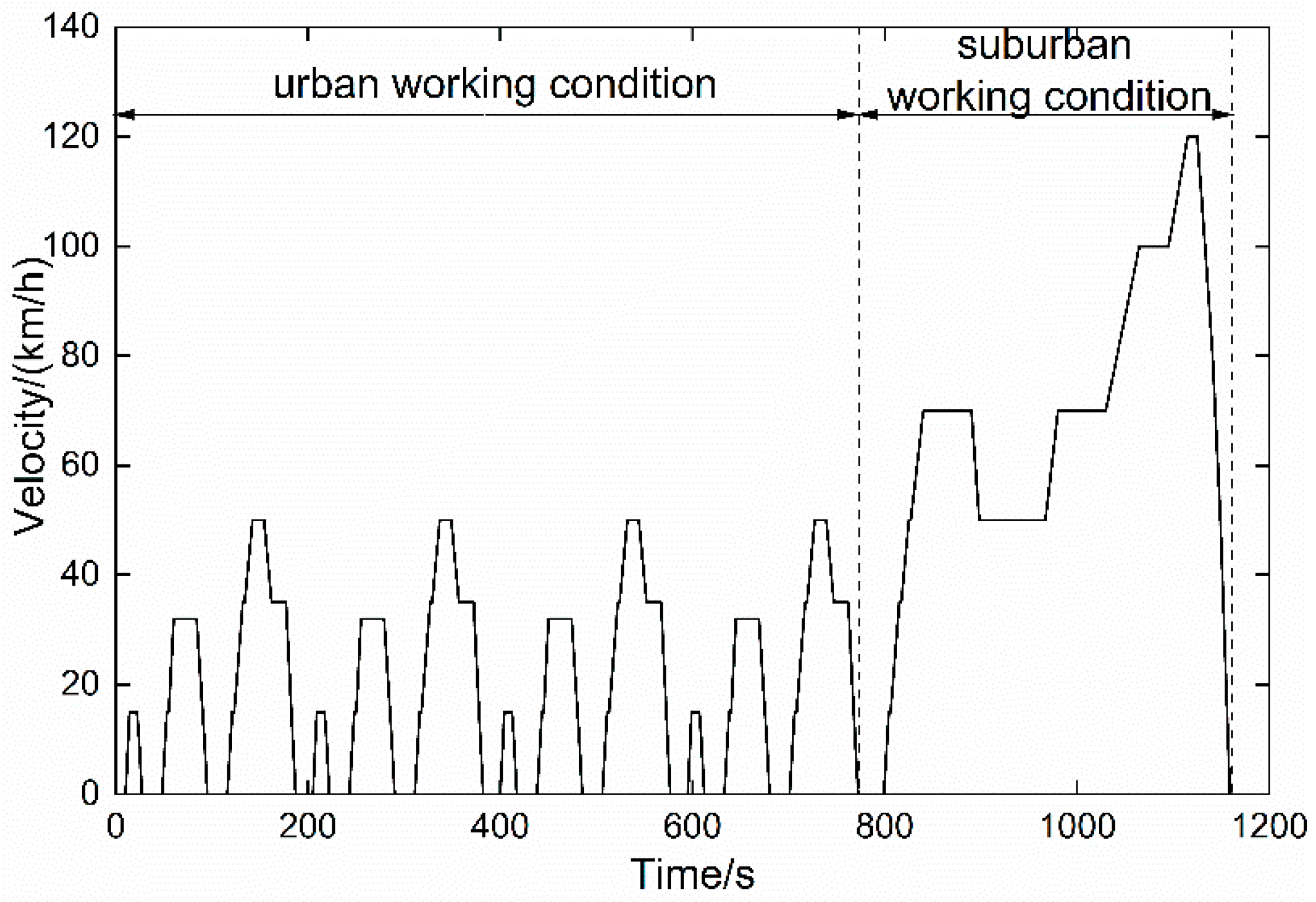
- The power components and transmission parameters represented by each individual in the population were replaced in the series-parallel PHEV backward simulation model, and the consumption of electricity in the urban driving cycle of NEDC was calculated. The optimal fuel consumption under the suburban driving cycle of NEDC was determined using the RPKM. The electricity consumption and the optimal fuel consumption were converted to the corresponding transportation costs to determine the suitability of each individual (the total operating cost of NEDC).
- The next generation of the population was selected according to the size of the fitness. The smaller the adaptability, the larger the probability of being selected; the individuals with large adaptability were eliminated in the process of evolution.
- Crossover and mutation operations of individuals in the new species group produced the next generation of individuals.
- Steps 2 to 4 were repeated until the termination condition was satisfied. At this time, the algorithm converged to the best chromosome, obtaining the optimal solution to the problem.
5.3. Component-Sizing Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| instantaneous fuel injection rate of the engine, g/s | g | gravity constant, | |
| output torque of the engine, | f | rolling resistance coefficient | |
| minimum output torque of the engine, | i | slope of the road | |
| maximum output torque of the engine, | aerodynamic drag coefficient | ||
| output speed of the engine, r/min | A | frontal area of the vehicle, | |
| minimum output speed of the engine, r/min | δ | rotational inertial coefficient | |
| maximum output speed of the engine, r/min | vehicle speed, | ||
| working efficiency of the ISG motor | torque demand of the driving wheel, | ||
| output torque of the ISG motor, | tire effective radius, m | ||
| minimum output torque of the ISG motor, | output torque for mechanical brakes, | ||
| maximum output torque of the ISG motor, | total fuel consumption under the target driving cycle, g | ||
| output speed of the ISG motor, r/min | fuel consumption of the engine, g | ||
| minimum output speed of the ISG motor, r/min | distribution coefficient | ||
| maximum output speed of the ISG motor, r/min | α | penalty factor | |
| working efficiency of the tracking motor | β | oil-to-electricity conversion coefficient | |
| output torque for the tracking motor, | maximum output power of the power battery, kW | ||
| minimum torque for the tracking motor, | F | the sum of all motion resistance forces, | |
| maximum torque for the tracking motor, | m | vehicle mass, kg | |
| output speed of the tracking motor, r/min | nominal capacity of the power battery, As | ||
| minimum speed of the tracking motor, r/min | state of charge of the battery | ||
| maximum speed of the tracking motor, r/min | minimum allowable SOC values of the battery | ||
| open circuit voltage of the power battery, V | maximum allowable SOC values of the battery | ||
| terminal voltage of the power battery, V | output power of the APU, kW | ||
| current of the power battery, A | minimum output power of the APU, kW | ||
| internal resistance of the power battery, Ω | maximum output power of the APU, kW | ||
| output power of the power battery, kW | minimum output power of the power battery, kW |
Abbreviation
| APU | Auxiliary Power Unit |
| CD | Charge Depleting |
| CS | Charge Sustaining |
| DP | Dynamic Programming |
| ECMS | Equivalent Consumption Minimum Strategy |
| GA | Genetic Algorithm |
| HEV | Hybrid Electric Vehicle |
| ISG | Integrated Starter Generator |
| MPC | Model Predictive Control |
| NEDC | New European Drive Cycle |
| NLP | Non-Linear Programming |
| OCV | Open Circuit Voltage |
| PHEV | Plug-in Hybrid Electric Vehicle |
| PMP | Pontryagin Maximum Principle |
| RPKM | Radau Pseudospectral Knotting Method |
| SDP | Stochastic Dynamic Programming |
| SNOPT | Sparse Nonlinear OPTimizer |
| SOC | State of Charge |
| TM | Tracking Motor |
References
- Zhao, K.; Liang, Z.; Huang, Y.; Wang, H.; Khajepour, A.; Zhen, Y. Research on a Novel Hydraulic/Electric Synergy Bus. Energies 2017, 11, 34. [Google Scholar] [CrossRef]
- Tang, X.; Yang, W.; Hu, X.; Zhang, D. A novel simplified model for torsional vibration analysis of a series-parallel hybrid electric vehicle. Mech. Syst. Signal Process. 2017, 85, 329–338. [Google Scholar] [CrossRef]
- Abedi, S.; Alimardani, A.; Gharehpetian, G.B.; Riahy, G.H.; Hosseinian, S. A comprehensive method for optimal power management and design of hybrid RES-based autonomous energy systems. Renew. Sustain. Energy Rev. 2012, 16, 1577–1587. [Google Scholar] [CrossRef]
- Zeyu, C.; Rui, X.; Kunyu, W.; Jiao, B. Optimal energy management strategy of a plug-in hybrid electric vehicle based on a particle swarm optimization algorithm. Energies 2015, 8, 3661–3678. [Google Scholar]
- Yan, J. Multi-objective parameters optimization of electric assist control strategy for parallel hybrid electric vehicle. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Singapore, 14–17 July 2009. [Google Scholar]
- Sarvestani, A.S.; Safavi, A.A. A novel optimal energy management strategy based on fuzzy logic for a hybrid electric vehicle. In Proceedings of the IEEE International Conference on Vehicular Electronics and Safety, Pune, India, 11–12 November 2009. [Google Scholar]
- Xiong, W.; Zhang, Y.; Yin, C. Optimal energy management for a series-parallel hybrid electric bus. Energy Convers. Manag. 2009, 50, 1730–1738. [Google Scholar] [CrossRef]
- Khayyam, H.; Bab-Hadiashar, A. Adaptive intelligent energy management system of plug-in hybrid electric vehicle. Energy 2014, 69, 319–335. [Google Scholar] [CrossRef]
- Antonio, S.; Lino, G. Control of Hybrid Electric Vehicle-Optimal Energy Management Strategies. IEEE Control Syst. Mag. 2007, 4, 60–70. [Google Scholar]
- Gao, J.; Strangas, E.G.; Sun, F.; Zhu, G.-M.G. Equivalent fuel consumption optimal control of a series hybrid electric vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2009, 223, 1003–1018. [Google Scholar] [CrossRef]
- Geng, B.; Mills, J.K.; Sun, D. Energy management control of micro turbine-powered plug-in hybrid electric vehicles using the telemetry equivalent consumption minimization strategy. IEEE Trans. Veh. Technol. 2011, 60, 4238–4248. [Google Scholar] [CrossRef]
- Zhang, S.; Xiong, R.; Sun, F. Model predictive control for power management in a plug-in hybrid electric vehicle with a hybrid energy storage system. Appl. Energy 2017, 185, 1654–1662. [Google Scholar] [CrossRef]
- Cairano, S.D.; Bernardini, D.; Bemporad, A.; Kolmanovsky, I.V. Stochastic MPC with learning for driver-predictive vehicle control and its application to HEV energy management. IEEE Trans. Control Syst. Technol. 2014, 22, 1018–1031. [Google Scholar] [CrossRef]
- Qian, L.; Qiu, L.; Xin, F.; Chen, P.; Wang, J. Energy Management Control Strategy and Optimization for Plug-in 4WD Hybrid Electric Vehicle. Trans. Chin. Soc. Agric. Eng. 2015, 31, 68–76. [Google Scholar]
- Yuan, Z.; Teng, L.; Sun, F.; Peng, H. Comparative Study of Dynamic Programming and Pontryagin’s Minimum Principle on Energy Management for a Parallel Hybrid Electric Vehicle. Energies 2013, 6, 2305–2318. [Google Scholar] [CrossRef]
- Patil, R.M.; Filipi, Z.; Fathy, H.K. Comparison of Supervisory Control Strategies for Series Plug-In Hybrid Electric Vehicle Powertrains Through Dynamic Programming. IEEE Trans. Control Syst. Technol. 2014, 22, 502–509. [Google Scholar] [CrossRef]
- Tribioli, L.; Barbieri, M.; Capata, R.; Sciubba, E.; Jannelli, E.; Bella, G. A Real Time Energy Management Strategy for Plug-in Hybrid Electric Vehicles based on Optimal Control Theory. Energy Procedia 2014, 45, 949–958. [Google Scholar] [CrossRef]
- Uebel, S.; Murgovski, N.; Tempelhahn, C.; Baker, B. Optimal Energy Management and Velocity Control of Hybrid Electric Vehicles. IEEE Trans. Veh. Technol. 2018, 67, 327–337. [Google Scholar] [CrossRef]
- Chen, Z.; Mi, C.C.; Xu, J.; Gong, X.; You, C. Energy management for a power-split plug-in hybrid electric vehicle based on dynamic programming and neutral networks. IEEE Trans. Veh. Technol. 2013, 63, 1567–1580. [Google Scholar] [CrossRef]
- Yu, H.; Kuang, M.; Mcgee, R. Trip-oriented energy management control strategy for plug-in hybrid electric vehicles. In Proceedings of the 50th IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, USA, 12–15 December 2011. [Google Scholar]
- Peng, J.K.; He, H.W.; Xiong, R. Rule based energy management strategy for a series-parallel plug-in hybrid electric bus optimized by dynamic programming. Appl. Energy 2017, 185, 1633–1643. [Google Scholar] [CrossRef]
- Moura, S.J.; Fathy, H.K.; Callway, D.S.; Stein, J.L. A stochastic optimal control approach for power management in plug-in hybrid electric vehicles. IEEE Trans. Control Syst. Technol. 2011, 19, 545–555. [Google Scholar] [CrossRef]
- Bashash, S.; Moura, S.J.; Forman, J.C.; Fathy, H.K. Plug-in hybrid electric vehicle charge pattern optimization for energy cost and battery longevity. J. Power Sources 2011, 196, 541–549. [Google Scholar] [CrossRef]
- Zhang, Y.; Meng, D.; Zhou, M.; Lu, D. Management strategy based on genetic algorithm optimization for PHEV. Int. J. Control Autom. 2014, 7, 399–408. [Google Scholar]
- Serrao, L.; Onori, S.; Rizzoni, G. ECMS as a realization of Pontryagin’s minimum principle for HEV control. In Proceedings of the 2009 American Control Conference, St. Louis, MI, USA, 10–12 June 2009. [Google Scholar]
- Xu, K.; Qiu, B.; Liu, G.; Chen, Q. Energy management strategy design of plug-in hybrid electric bus based on Pontryagin’s Minimum Principle. In Proceedings of the 2014 IEEE Conference and Expo Transportation Electrification Asia-Pacific, Beijing, China, 31 August–3 September 2014. [Google Scholar]
- Hou, C.; Ouyang, M.; Xu, L.; Wang, H. Approximate Pontryagin’s minimum principle applied to the energy management of plug-in hybrid electric vehicles. Appl. Energy 2014, 115, 174–189. [Google Scholar] [CrossRef]
- Zhang, J.; Zheng, C.; Cha, S.W.; Duan, S. Co-state variable determination in Pontryagin’s Minimum Principle for energy management of hybrid vehicles. Int. J. Precis. Eng. Manuf. 2016, 17, 1215–1222. [Google Scholar] [CrossRef]
- Lin, X.; Sun, D.; Deng, T. Energy management strategy optimization for a series-parallel hybrid electric bus based on Pontryagin’s minimum principle. Automot. Eng. 2012, 34, 865–870. [Google Scholar]
- Du, C.; Gan, W.; Zhang, P. Comparison of torque distribution strategies with different optimization objective function for HEV based on dynamic programming. Appl. Res. Comput. 2017, 34, 1308–1310. [Google Scholar]
- Wang, X.M.; He, H.W.; Sun, F.C.; Zhang, J.L. Application study on the dynamic programming algorithm for energy management of plug-in hybrid electric vehicles. Energies 2015, 8, 3225–3244. [Google Scholar] [CrossRef]
- Peng, H.; Yang, Y.Q.; Liu, C.Y. An energy management for series hybrid electric vehicle using improved dynamic programming. IOP Conf. Ser. Earth Environ. Sci. 2018, 121, 052077. [Google Scholar] [CrossRef]
- Shen, C.Y.; Xia, C.Y. Optimal Power Split in a Hybrid Electric Vehicle Using Improved Dynamic Programming. In Proceedings of the IEEE Power & Energy Engineering Conference, Chengdu, China, 28–31 March 2010. [Google Scholar]
- Hung, Y.H.; Tung, Y.M.; Chang, C.H. Optimal control of integrated energy management/mode switch timing in a three-power-source hybrid powertrain. Appl. Energy 2016, 173, 184–196. [Google Scholar] [CrossRef]
- Silvas, E.; Bergshoeff, E.; Hofman, T.; Steinbuch, M. Comparison of bi-level optimization frameworks for sizing and control of a hybrid electric vehicle. In Proceedings of the Vehicle Power and Propulsion Conference, Coimbra, Portugal, 27–30 October 2014. [Google Scholar]
- Xiong, R.; He, H.; Sun, F. Methodology for optimal sizing of hybrid power system using particle swarm optimization and dynamic programming. Energy Procedia 2015, 75, 1895–1900. [Google Scholar] [CrossRef]
- Goos, J.; Criens, C.; Witters, M. Automatic Evaluation and Optimization of Generic Hybrid Vehicle Topologies using Dynamic Programming. In Proceedings of the 20th World Congress of the International-Federation-of-Automatic-Control (IFAC), Toulouse, France, 9–14 July 2017. [Google Scholar]
- Hernández, J.C.; Ruiz-Rodriguez, F.J.; Jurado, F. Modelling and assessment of the combined technical impact of electric vehicles and photovoltaic generation in radial distribution systems. Energy 2017, 141, 316–332. [Google Scholar] [CrossRef]
- Ruiz-Rodríguez, F.J.; Hernández, J.C.; Jurado, F. Probabilistic Load-Flow Analysis of Biomass-Fuelled Gas Engines with Electrical Vehicles in Distribution Systems. Energies 2017, 10, 1536–1558. [Google Scholar] [CrossRef]
- Xiong, R.; Zhang, Y.; He, H.; Zhou, X.; Pecht, M.G. A double-scale, particle-filtering, energy state prediction algorithm for lithium-ion batteries. IEEE Trans. Ind. Electron. 2018, 65, 1526–1538. [Google Scholar] [CrossRef]
- Zhou, W.; Zhang, C.; Li, J.; Fathy, H.K. A pseudospectral strategy for optimal power management in series hybrid electric powertrains. IEEE Trans. Veh. Technol. 2016, 65, 4813–4825. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Complete quality of whole vehicle/kg | 1645 |
| Wheel radius/m | 0.317 |
| Gliding quality (sliding resistance parameter)/kg | 1710 |
| Sliding resistance curve/N | F = 0.0353 × u2 + 1.4114 × u + 114.7712 |
| Efficiency of transmission system | 0.965 |
| Engine maximum output power/kW | 65 |
| Maximum power of ISG motor/kW | 40 |
| Maximum power of tracking motor/kW | 110 |
| Power cell capacity/(AH) | 34 |
| Speed ratio of engine to wheel end | 3.7 |
| Speed ratio of tracking motor to wheel end | 7.5 |
| Clutch States | Expression for the Output Power of the Power Battery | Mode | |
|---|---|---|---|
| clutch is released | pure electric drive mode | ||
| series drive mode | |||
| APU separate drive mode | |||
| APU drive charging mode | |||
| clutch is engaged | parallel drive mode | ||
| pure engine drive mode | |||
| independent of clutch state | braking energy recovery mode |
| Comparison Items | DP | RPKM | |
| Before post-processing | Fuel consumption/g | 107.99 | 109.91 |
| 100 km fuel consumption/(L/100 km) | 5.97 | 6.08 | |
| Relative error of two algorithms for 100 km fuel consumption/(%) | 1.81 | — | |
| After post-processing | Fuel consumption/g | 109.32 | 109.44 |
| 100 km fuel consumption/(L/100 km) | 6.047 | 6.054 | |
| Relative error of two algorithms for 100 km fuel consumption/(%) | 0.12 | — | |
| Solving time/s | 32477.19 | 17.98 | |
| Optimization Items | Values |
|---|---|
| /kW | 69.99 |
| /kW | 65.14 |
| /kW | 120.38 |
| /A·h | 39.46 |
| 7.65 | |
| 3.49 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, K.; Bei, J.; Liu, Y.; Liang, Z. Development of Global Optimization Algorithm for Series-Parallel PHEV Energy Management Strategy Based on Radau Pseudospectral Knotting Method. Energies 2019, 12, 3268. https://doi.org/10.3390/en12173268
Zhao K, Bei J, Liu Y, Liang Z. Development of Global Optimization Algorithm for Series-Parallel PHEV Energy Management Strategy Based on Radau Pseudospectral Knotting Method. Energies. 2019; 12(17):3268. https://doi.org/10.3390/en12173268
Chicago/Turabian StyleZhao, Kegang, Jinghao Bei, Yanwei Liu, and Zhihao Liang. 2019. "Development of Global Optimization Algorithm for Series-Parallel PHEV Energy Management Strategy Based on Radau Pseudospectral Knotting Method" Energies 12, no. 17: 3268. https://doi.org/10.3390/en12173268
APA StyleZhao, K., Bei, J., Liu, Y., & Liang, Z. (2019). Development of Global Optimization Algorithm for Series-Parallel PHEV Energy Management Strategy Based on Radau Pseudospectral Knotting Method. Energies, 12(17), 3268. https://doi.org/10.3390/en12173268