Intelligent Energy Management Algorithms for EV-charging Scheduling with Consideration of Multiple EV Charging Modes


Abstract
:1. Introduction
- (1)
- For the ISS framework, GA, PSO, and global search (GS) are compared;
- (2)
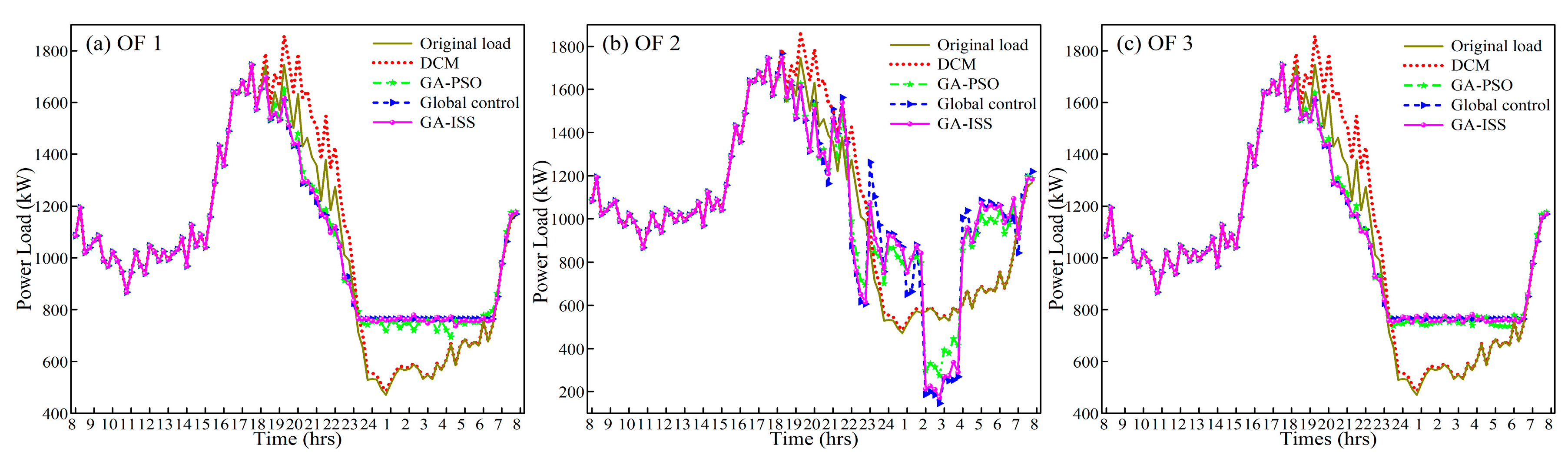
- For the GA-ISS framework, three methods are compared, including: a global control that calculates all the variables and constraints through CVX; DCM (dumbing control method) that charges all EVs as soon as they are plugged in; and a GA-PSO hybrid method.
2. Modelling for the Optimization of EV Charging
2.1. Assumptions
- (1)
- All participated EVs are with the ideal charging/discharging efficiency of 100%.
- (2)
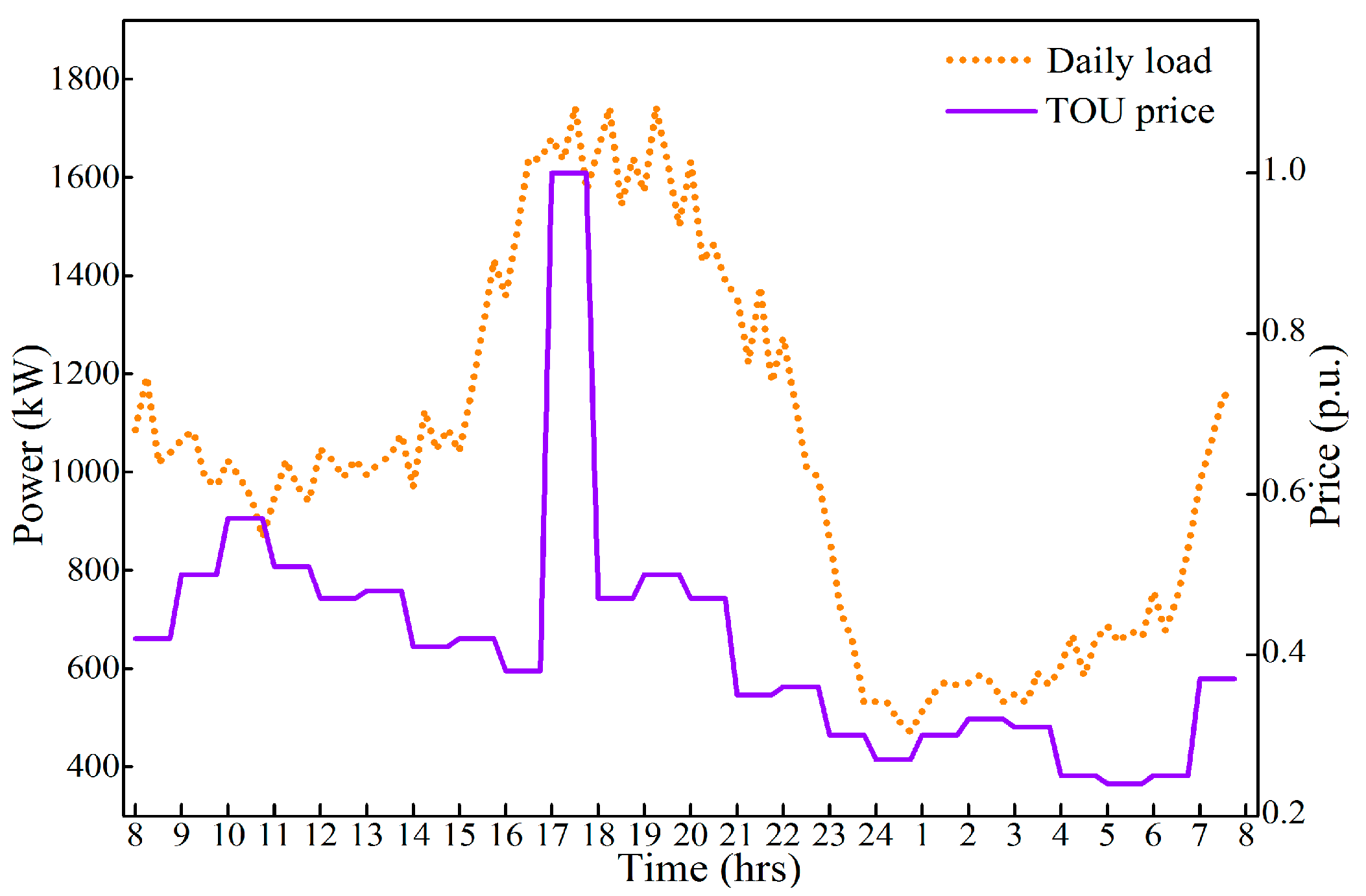
- The charging price and discharging tariffs follow the spot prices of basic load at each timeslot.
- (3)
- The time period of study starts from 8:00AM to 8:00AM of following day with 15 min per interval. Therefore, the time window is divided into 96 timeslots.
2.2. Definition of Charging Modes
- (1)
- CD-F mode: charging/discharging with a flexible charging rate,
- (2)
- CD-C mode: charging/discharging with a constant charging rate,
- (3)
- C-F mode: charging only with a flexible charging rate,
- (4)
- C-C mode: charging only with a constant charging rate.
2.3. Constraints
2.4. Objective Functions
2.5. Transform the EV Charging into NLP/MINLP Problem
3. Proposed ISS and GA-ISS Algorithm Frameworks
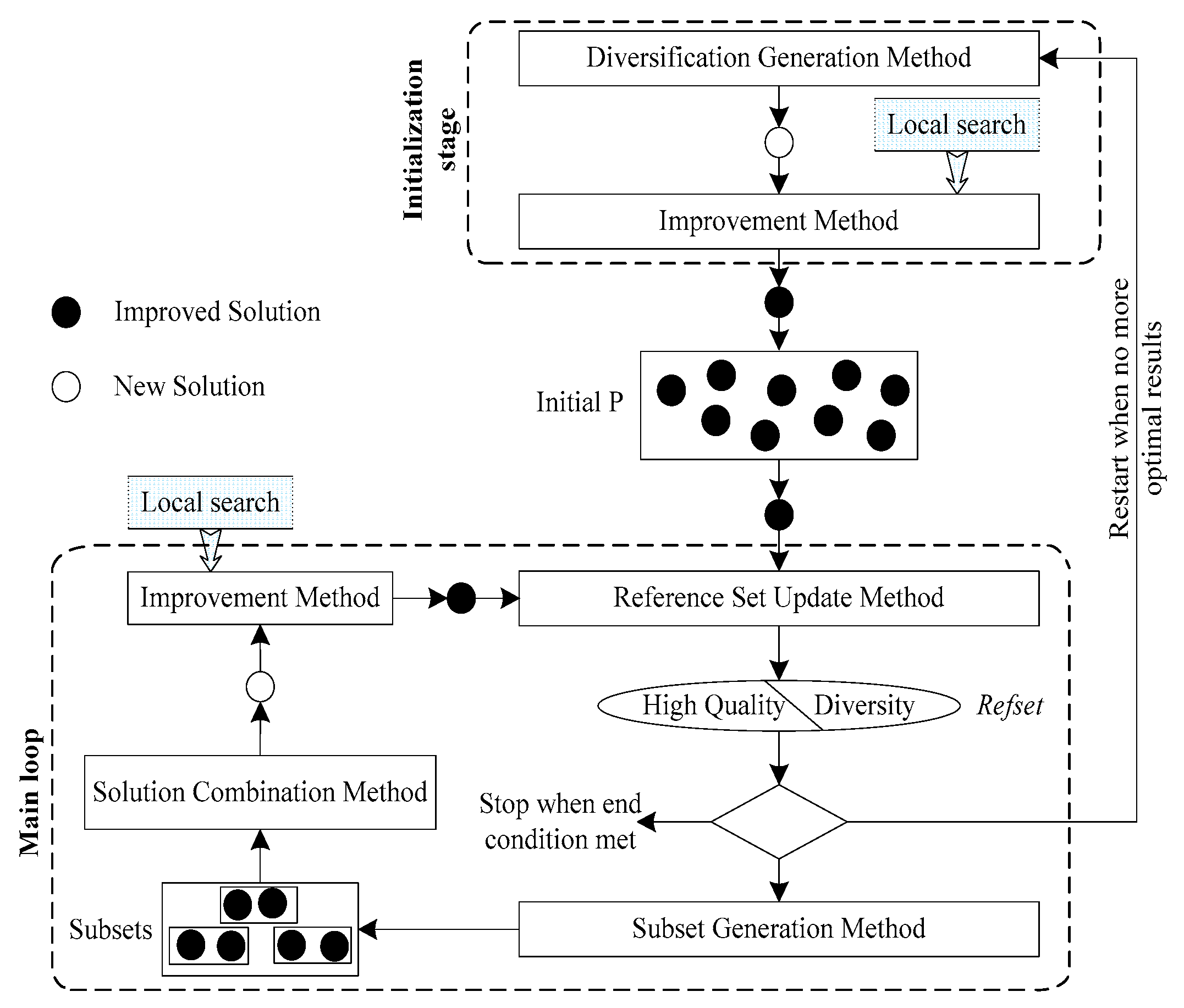
3.1. Basics of Scatter Search (SS)
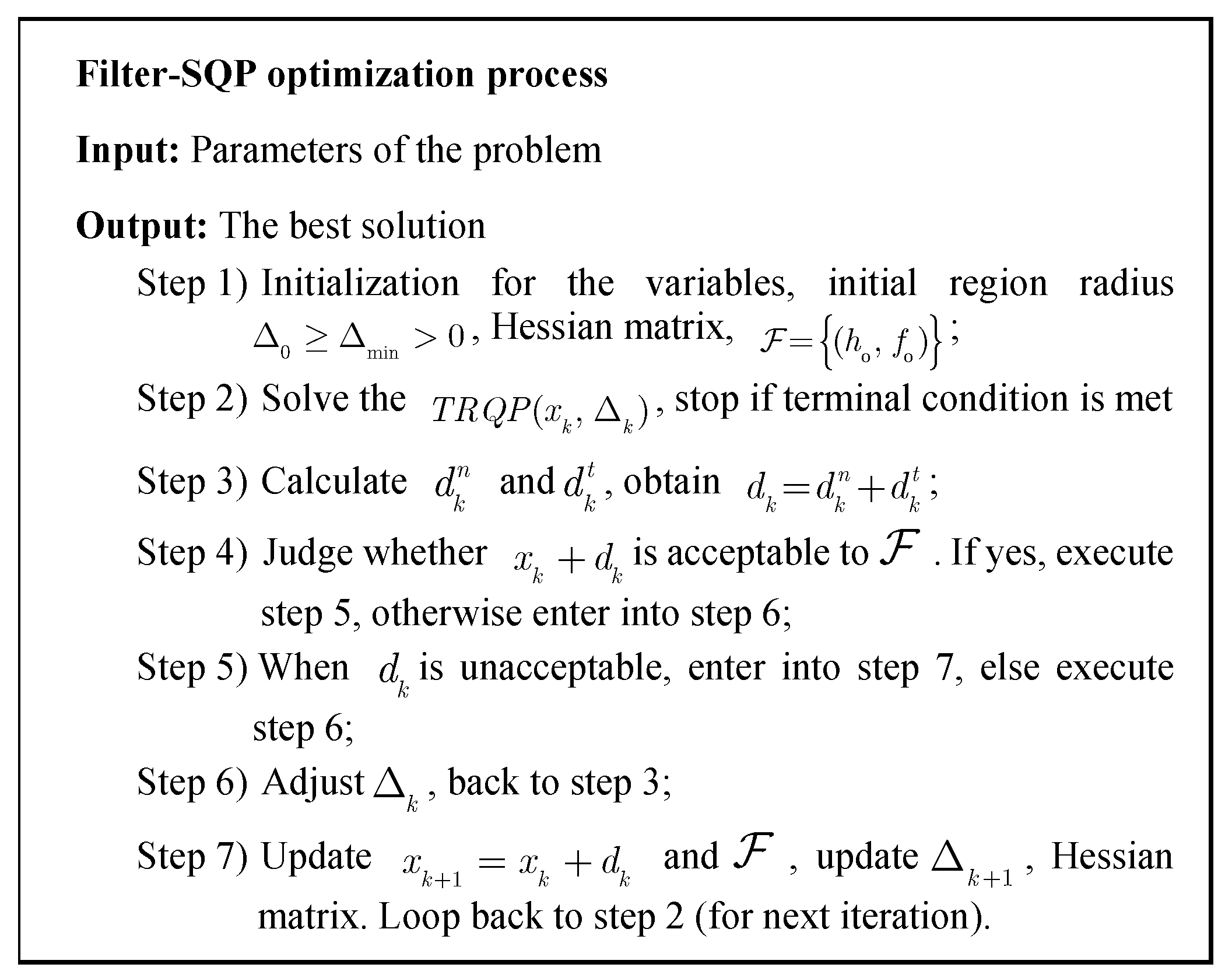
3.2. The Utilized Local Search Solvers
3.3. The Proposed ISS Algorithm for Single EV Charging
3.4. The Proposed GA-ISS Method for Massive EV Charging
4. Simulation and Results
4.1. Parameter Setting
4.2. Simulation Results
- (a)
- (b)
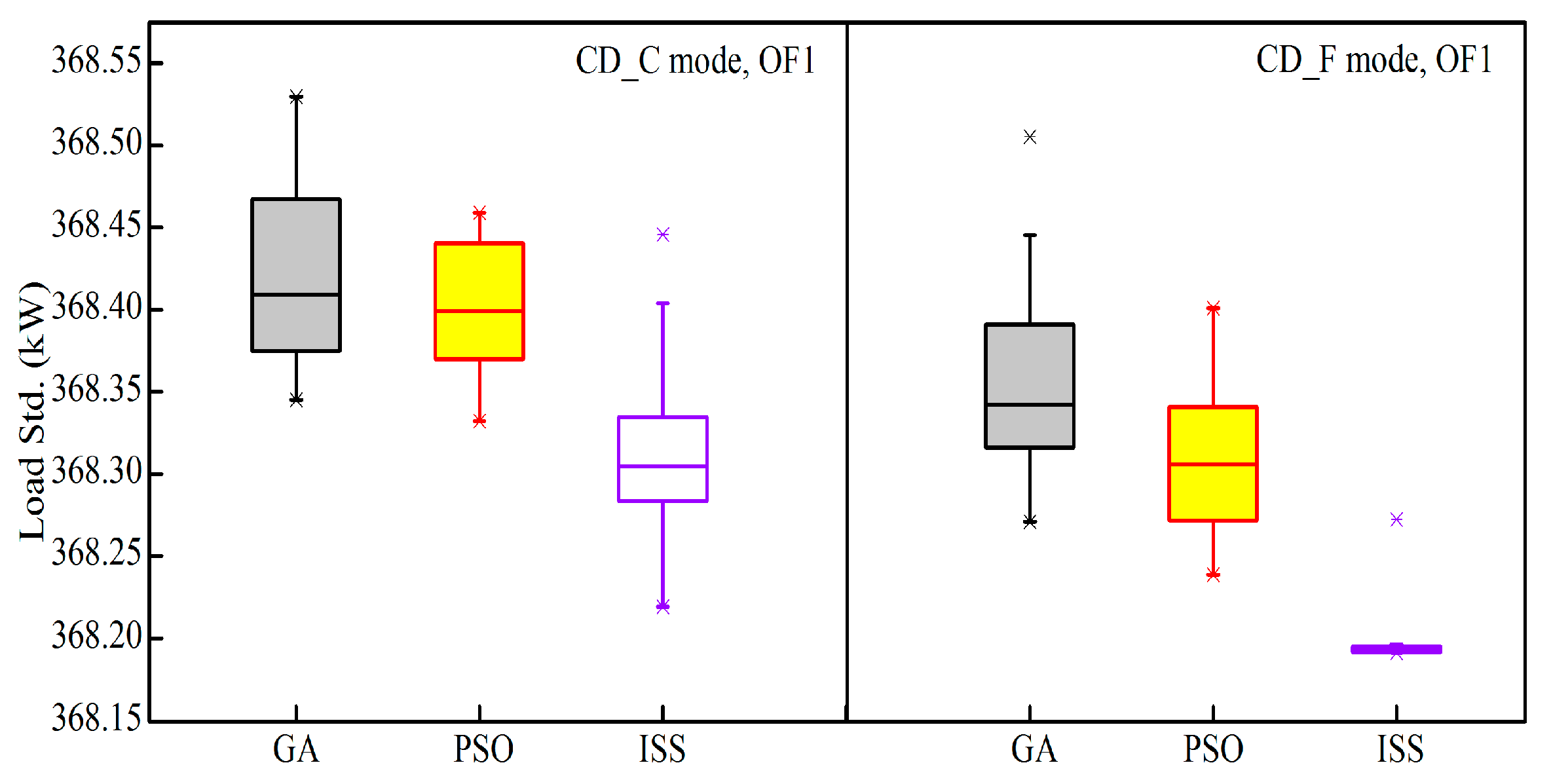
- Since a GS is unable to solve MINLP problems, only a GA and PSO [40] have been tested for constant charging rate.
- (c)
- The population number of the ISS is set to 30, while its iteration number of local solvers is limited to 10. The population member of the GA and PSO are set to 100. In addition, the total iteration numbers for all the above methods are set to 100.
- The dumbing control method (DCM), which charges all EVs as soon as they are plugged in, is tested;
- A GA-PSO hybrid method from [41] is chosen for comparison, since it can obtain better solutions along with less variation and processing time in comparison to other common heuristic methods. The population size and iteration number for GA-PSO and GA-ISS are set to be 20 and 50, respectively. Moreover, during the inner optimization for EV scheduling of GA-PSO and GA-ISS, the determination of a single EV state via PSO/ISS is set to be stopped when the minimum criteria of the solution quality is satisfied. In Table 6, the detailed parameters of the algorithms utilized for group EV charging are displayed.
- A commercial CVX [42] toolbox is also simulated to perform the EV charging scheduling method, since it can simultaneously calculate all the variables and constraints and obtain the global optimized result. This approach is herein named global control.
5. Conclusion and Future Work
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Time interval set | |
| EV set | |
| Time index | |
| EV index | |
| Total number of timeslots | |
| Charging power value for EV in time | |
| Lower charging power limit for EV | |
| Upper charging power limit for EV | |
| SOC for EV in time | |
| SOC value at the beginning for EV | |
| SOC value at the end for EV | |
| Minimum allowed SOC value for EV | |
| Maximum allowed SOC value for EV | |
| Expectation level for the SOC of EV | |
| Nominal battery SOC of EV | |
| Total load demand in time | |
| Active base load in time | |
| Maximum supply power in time | |
| Electricity tariff in time | |
| TOU price at time interval | |
| Linear price rate at time interval | |
| Linear term of linear price | |
| Constant term of linear price | |
| Nominal capacity of EV |
References
- Haidar, A.M.A.; Muttaqi, K.M.; Sutanto, D. Technical challenges for electric power industries due to grid-integrated electric vehicles in low voltage distributions: A review. Energy Convers. Manag. 2014, 86, 689–700. [Google Scholar] [CrossRef]
- De Quevedo, P.M.; Muñoz-Delgado, G.; Contreras, J. Impact of electric vehicles on the expansion planning of distribution systems considering renewable energy, storage and charging stations. IEEE Trans. Smart Grid 2017. [Google Scholar] [CrossRef]
- Morais, H.; Sousa, T.; Vale, Z.; Faria, P. Evaluation of the electric vehicle impact in the power demand curve in a smart grid environment. Energy Convers. Manag. 2014, 82, 268–282. [Google Scholar] [CrossRef] [Green Version]
- Tang, D.; Wang, P. Nodal impact assessment and alleviation of moving electric vehicle loads: From traffic flow to power flow. IEEE Trans. Power Syst. 2016, 31, 4231–4242. [Google Scholar] [CrossRef]
- Beaude, O.; Lasaulce, S.; Hennebel, M.; Mohand-Kaci, I. Reducing the impact of EV charging operations on the distribution network. IEEE Trans. Smart Grid 2016, 7, 2666–2679. [Google Scholar] [CrossRef]
- Zhang, X.; Zhong, Q.; Kadirkamanathan, V.; He, J.; Huang, J. Source-side Series-virtual-impedance Control to Improve the Cascaded System Stability and the Dynamic Performance of Its Source Converter. IEEE Trans. Power Electron. 2018. [Google Scholar] [CrossRef]
- Jian, L.; Zhu, X.; Shao, Z.; Niu, S.; Chan, C.C. A scenario of vehicle-to-grid implementation and its double-layer optimal charging strategy for minimizing load variance within regional smart grids. Energy Convers. Manag. 2014, 78, 508–517. [Google Scholar] [CrossRef]
- Xie, D.; Chu, H.; Gu, C.; Li, F.; Zhang, Y. A novel dispatching control strategy for EVs intelligent integrated stations. IEEE Trans. Smart Grid 2017, 8, 802–811. [Google Scholar] [CrossRef]
- Panwar, L.K.; Reddy, K.S.; Kumar, R.; Panigrahi, B.K.; Vyas, S. Strategic Energy Management (SEM) in a micro grid with modern grid interactive electric vehicle. Energy Convers. Manag. 2015, 106, 41–52. [Google Scholar] [CrossRef]
- Sun, B.; Huang, Z.; Tan, X.; Tsang, D.H.K. Optimal scheduling for electric vehicle charging with discrete charging levels in distribution grid. IEEE Trans. Smart Grid 2018, 9, 624–634. [Google Scholar] [CrossRef]
- García-Álvarez, J.; González, M.A.; Vela, C.R. Metaheuristics for solving a real-world electric vehicle charging scheduling problem. Appl. Soft Comput. J. 2018, 65, 292–306. [Google Scholar] [CrossRef]
- Mohamed, A.; Salehi, V.; Ma, T.; Mohammed, O. Real-time energy management algorithm for plug-in hybrid electric vehicle charging parks involving sustainable energy. IEEE Trans. Sustain. Energy 2014, 5, 577–586. [Google Scholar] [CrossRef]
- Deilami, S.; Masoum, S.A.; Moses, S.P.; Masoum, A.S.M. Real-time coordination of plug-in electric vehicle charging in smart grids to minimize power losses and improve voltage profile. IEEE Trans. Smart Grid 2011, 2, 436–467. [Google Scholar] [CrossRef]
- Wang, B.; Yang, J. Optimal electric vehicle charging scheduling with time varying profits. In Proceedings of the 2018 52nd Annual Conference on Information Sciences and Systems (CISS), Princeton, NJ, USA, 21–23 March 2018; pp. 1–6. [Google Scholar]
- Mao, T.; Lau, W.H.; Shum, C.; Chung, H.S.H.; Tsang, K.F.; Tse, N.C.F. A regulation policy of EV discharging price for demand scheduling. IEEE Trans. Power Syst. 2018, 33, 1275–1288. [Google Scholar] [CrossRef]
- Zhang, X.; Zhong, Q. Improved Adaptive-Series-Virtual-Impedance Control Incorporating Minimum Ripple Point Tracking for Load Converters in DC Systems. IEEE Trans. Power Electron. 2016, 31, 8088–8095. [Google Scholar] [CrossRef]
- Bourass, A.; Cherkaoui, S.; Khoukhi, L. Secure optimal itinerary planning for electric vehicles in the smart grid. IEEE Trans. Ind. Inform. 2017, 13, 3236–3245. [Google Scholar] [CrossRef]
- Zhao, T.; Peng, Y.; Nehorai, A. An optimal and distributed demand response strategy with electric vehicles in the smart grid. IEEE Trans. Smart Grid 2014, 5, 861–869. [Google Scholar]
- Leterme, W.; Ruelens, F.; Claessens, B.; Belmans, R. A flexible stochastic optimization method for wind power balancing with PHEVs. IEEE Trans. Smart Grid 2014, 5, 1238–1245. [Google Scholar] [CrossRef]
- Malikopoulos, A.A. Supervisory power management control algorithms for hybrid electric vehicles: A survey. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1869–1885. [Google Scholar] [CrossRef]
- Soares, J.; Morais, H.; Sousa, T.; Vale, Z.; Faria, P. Day-ahead resource scheduling including demand response for electric vehicles. IEEE Trans. Smart Grid 2013, 4, 596–605. [Google Scholar] [CrossRef]
- Yu, J.J.Q.; Li, V.O.K.; Lam, A.Y.S. Optimal V2G scheduling of electric vehicles and unit commitment using chemical reaction optimization. In Proceedings of the IEEE Cong. Evolutionary Computation (CEC), Cancun, Mexico, 20–23 June 2013; pp. 392–399. [Google Scholar]
- Kang, Q.; Wang, J.; Zhou, M.; Ammari, A.C. Centralized charging strategy and scheduling algorithm for electric vehicles under a battery swapping scenario. IEEE Trans. Intell. Transp. Syst. 2016, 17, 659–669. [Google Scholar] [CrossRef]
- Alonso, M.; Amaris, H.; Germain, J.G.; Galan, J.M. Optimal charging scheduling of electric vehicles in smart grids by heuristic algorithms. Energies 2014, 7, 2449–2475. [Google Scholar] [CrossRef]
- Yilmaz, M.; Krein, P.T. Review of the impact of vehicle-to-grid technologies on distribution systems and utility interfaces. IEEE Trans. Power Electron. 2013, 28, 5673–5689. [Google Scholar] [CrossRef]
- Fang, X.; Misra, S.; Xue, G.; Yang, D. Smart grid—The new and improved power grid: A survey. IEEE Commun. Surv. Tutor. 2012, 14, 944–980. [Google Scholar] [CrossRef]
- Glover, F.; Laguna, M.; Martí, R. Fundamentals of scatter search and path relinking. Control Cybern. 2000, 29, 653–684. [Google Scholar]
- Yu, K.; Pu, D. A nonmonotone filter trust region method for nonlinear constrained optimization. J. Comput. Appl. Math. 2009, 233, 230–239. [Google Scholar]
- Exler, O.; Schittkowski, K. A trust region SQP algorithm for mixed-integer nonlinear programming. Optim. Lett. 2007, 1, 269–280. [Google Scholar] [CrossRef]
- Charging Lithium-Ion. Available online: http://batteryuniversity.com (accessed on 25 December 2018).
- Tsui, K.M.; Chan, S.C. Demand response optimization for smart home scheduling under real-time pricing. IEEE Trans. Smart Grid 2012, 3, 1812–1821. [Google Scholar] [CrossRef]
- Nebro, A.J.; Luna, F.; Alba, E.; Dorronsoro, B.; Durillo, J.J.; Beham, A. AbYSS: Adapting scatter search to multiobjective optimization. IEEE Trans. Evol. Comput. 2008, 12, 439–457. [Google Scholar] [CrossRef]
- McKay, M.D.; Beckman, R.J.; Conover, W.J. A comparison of three methods for selecting values of input variables in the analysis of output from a computer code. Technometrics 2000, 42, 55–61. [Google Scholar] [CrossRef]
- Egea, J.A.; Balsa-Canto, E.; Garcia, M.-S.G.; Banga, J.R. Dynamic optimization of nonlinear processes with an enhanced scatter search method. Ind. Eng. Chem. Res. 2009, 48, 4388–4401. [Google Scholar] [CrossRef]
- Qian, K.; Zhou, C.; Allan, M.; Yuan, Y. Modeling of load demand due to EV battery charging in distribution Systems. IEEE Trans. Power Syst. 2011, 26, 802–810. [Google Scholar] [CrossRef]
- Vagropoulos, S.I.; Bakirtzis, A.G. Optimal bidding strategy for electric vehicle aggregators in electricity markets. IEEE Trans. Power Syst. 2013, 28, 4031–4041. [Google Scholar] [CrossRef]
- Goldberg, D.E. Genetic Algorithms in Search, Optimization, and Machine Learning; Addison-Wesley: Reading, MA, USA, 1989. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the IEEE International Conference on Neual Networks, IV, Perth, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar]
- Kearfott, R.B. Rigorous Global Search: Continuous Problems; Kluwer: Dordrecht, The Netherlands, 1996. [Google Scholar]
- Kennedy, J.; Eberhart, R. A discrete binary version of the particle swarm algorithm. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, Orlando, FL, USA, 12–15 October 1997; pp. 4104–4108. [Google Scholar]
- Sheikhalishahi, M.; Ebrahimipour, V.; Shiri, H.; Zaman, H.; Jeihoonian, M. A hybrid GA-PSO approach for reliability optimization in redundancy allocation problem. Int. J. Adv. Manuf. Technol. 2013, 68, 317–338. [Google Scholar] [CrossRef]
- Michael, G.; Stephen, B. CVX: Matlab Software for Disciplined Convex Programming. Available online: http://cvxr.com/cvx (accessed on 25 December 2018).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Charging Modes | Charging Rate Range (Normalized Value) | Variables Type | Sub-Problem |
|---|---|---|---|
| CD-F | [−1,1] | Continuous | NLP |
| CD-C | [−1,1] | Discrete | MINLP |
| C-F | [0,1] | Continuous | NLP |
| C-C | [0,1] | Discrete | MINLP |
| Capacity | Initial SOC | Rated Charging Power | Start Time | End Time | Desired SOC |
|---|---|---|---|---|---|
| 24 (kWh) | 58.59% | 3.3 kW | 21:15 | 6:30 | 90% |
| Parameter | Minimum | Maximum | Mean | St. Dev |
|---|---|---|---|---|
| Arriving Time (h) | 18:00 | 22:00 | 20:00 | 1:30 |
| Departure Time (h) | 5:45 | 7:45 | 7:00 | 0:45 |
| SOC (%) | 20 | 90 | 50 | 20 |
| Capacity (kWh) | 10 | 30 | 18 | 6.93 |
| Plugging power (kW) | 2 | 10 | 3.54 | 1.48 |
| Objectives | Type | GS | GA | PSO | Proposed ISS |
|---|---|---|---|---|---|
| OF1 (standard deviation, kW) | CD-F | 368.19 | 368.91 | 368.30 | 368.21 |
| CD-C | N/A | 368.40 | 368.40 | 368.36 | |
| C-F | 368.71 | 368.96 | 368.77 | 368.74 | |
| C-C | N/A | 369.00 | 368.80 | 368.80 | |
| OF2 (normalized value, p. u.) | CD-F | 44,277.19 | 44,278.55 | 44,278.04 | 44,277.22 |
| CD-C | N/A | 44,278.63 | 44,278.19 | 44,277.69 | |
| C-F | 44,280.23 | 44,281.59 | 44,281.34 | 44,280.45 | |
| C-C | N/A | 44,280.65 | 44,280.42 | 44,280.39 | |
| OF3 (normalized value, p. u.) | CD-F | 40,457.35 | 40,459.66 | 40,459.15 | 40,457.39 |
| CD-C | N/A | 40,459.74 | 40,458.98 | 40,458.40 | |
| C-F | 40,463.21 | 40,464.29 | 40,463.72 | 40,463.24 | |
| C-C | N/A | 40,463.55 | 40,463.54 | 40,463.43 |
| Objective Function | Type | GS | GA | PSO | Proposed ISS |
|---|---|---|---|---|---|
| OF1 | CD-F | 93.16 | 11.67 | 8.51 | 1.18 |
| CD-C | N/A | 9.38 | 6.24 | 0.98 | |
| C-F | 49.39 | 12.07 | 7.43 | 1.22 | |
| C-C | N/A | 9.97 | 5.98 | 0.86 | |
| OF2 | CD-F | 80.39 | 11.13 | 6.88 | 1.14 |
| CD-C | N/A | 9.77 | 6.15 | 0.95 | |
| C-F | 21.41 | 12.31 | 7.32 | 1.03 | |
| C-C | N/A | 9.62 | 6.47 | 0.81 | |
| OF3 | CD-F | 43.61 | 12.65 | 6.42 | 1.25 |
| CD-C | N/A | 9.38 | 5.97 | 0.94 | |
| C-F | 31.43 | 13.81 | 6.26 | 1.12 | |
| C-C | N/A | 8.88 | 5.83 | 0.83 |
| Parameter | DCM | GA-PSO | Global Control | GA-ISS |
|---|---|---|---|---|
| Mutation rate | N/A | 0.2 | N/A | 0.2 |
| Crossover rate | N/A | 0.4 | N/A | 0.4 |
| Population size | N/A | 20 | N/A | 20 |
| Iteration number | N/A | 50 | N/A | 50 |
| Method | OF1 | OF2 | OF3 | |||
|---|---|---|---|---|---|---|
| Result | Time | Result | Time | Result | Time | |
| GA-PSO | 298.02 | 337.6 | 44,615.2 | 291.2 | 41,274.5 | 359.7 |
| Global Control | 289.39 | 92.6 | 44,538.1 | 87.7 | 41,222.2 | 94.2 |
| GA-ISS | 291.75 | 112.9 | 44,558.5 | 105.9 | 41,229.2 | 117.1 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mao, T.; Zhang, X.; Zhou, B. Intelligent Energy Management Algorithms for EV-charging Scheduling with Consideration of Multiple EV Charging Modes. Energies 2019, 12, 265. https://doi.org/10.3390/en12020265
Mao T, Zhang X, Zhou B. Intelligent Energy Management Algorithms for EV-charging Scheduling with Consideration of Multiple EV Charging Modes. Energies. 2019; 12(2):265. https://doi.org/10.3390/en12020265
Chicago/Turabian StyleMao, Tian, Xin Zhang, and Baorong Zhou. 2019. "Intelligent Energy Management Algorithms for EV-charging Scheduling with Consideration of Multiple EV Charging Modes" Energies 12, no. 2: 265. https://doi.org/10.3390/en12020265
APA StyleMao, T., Zhang, X., & Zhou, B. (2019). Intelligent Energy Management Algorithms for EV-charging Scheduling with Consideration of Multiple EV Charging Modes. Energies, 12(2), 265. https://doi.org/10.3390/en12020265