1. Introduction
In the past couple of decades, the world generally, and developed countries in particular, have experienced unprecedented levels of urbanization. Major cities in developed countries have recorded increasing rates of this demographic rural-to-urban transition. This growth has been followed by a corresponding significant expansion of global fueling demands for transportation, representing 27% of the global energy consumption [
1,
2]. The bulk (92–95%) of this energy requirement is provided from petroleum, which in numerical terms is approximately 2.507 billion tonnes (Gt) of oil, or 105 EJ (EJ = Exa – Joule = 10
18 Joule) [
3,
4,
5]. It is estimated that consumption of petroleum-based fuel will continue to increase in the coming years and will reach 120 quadrillions of Btu (1 British thermal unit = 1055 kJ) by 2050. Concomitantly, heavy reliance on petroleum by the transport sector has focused global attention on the resultant problems of greenhouse gas emissions and air pollution, as well as on the long-term security of energy supplies [
4]. These concerns are justified by the fact that the transport sector has the highest rate of growth in energy use and related CO
2 emissions.
As reported in Reference [
1], in 2007 the transport sector was responsible for 23% of energy-related CO
2 emissions worldwide with a total of 6.6 Gt CO
2 released into the air. The bulk of these emissions are road transportation and mostly from passenger transport. These in turn account for 72.8% of the total fuel consumption and 72.1% of the total emissions in the transportation sector [
1,
2,
3]. It is likely that current high rates of urbanization worldwide will augment this trend and be accompanied by enhanced noise and air pollution and congestion in the affected urban areas. The global situation will likely degenerate further in developing countries owing to the popularity of private motorized vehicles on account of their being a flexible and reliable mode of travel, thus increasing the global glut of vehicles [
1]. Confirmation of this forecast can be found in Reference [
6], which predicts that the number of passenger vehicles worldwide will increase from 1.040 billion cars in 2015 to 2.111 billion cars in 2040. In order to prevent and contain the environmental problems caused by expansion of the transport sector, the most feasible solutions will involve increasing public transportation in urban areas, rejecting older models of vehicles in favor of newer, more efficient ones, and the more widespread use of electric car (EV) solutions.
The main specification of electrical vehicles that is expected to aid its acceptance and market penetration is the battery electric vehicle (BEV) [
6]. The BEV is exempt from CO
2 emissions and has an overall efficiency that ranges between 80% and 85%. Fuel consumption is economical compared to the traditional internal combustion engine (ICE) vehicles. The main drawback of the BEV, however, is slowing down of diffusion caused by the battery. Indeed, the cost of the Li-ion battery is between 150 and 200
$/kWh, which has an effect on the price of the vehicle, which is more expensive than its ICE counterpart. Furthermore, neither the energy density nor the charging time is comparable to fossil fuels. The actual energy density of a Li-ion battery pack is of 100–180 Wh/kg, which is not enough to guarantee the same driving range of an ICE vehicle even when a huge battery pack of >100 kWh is considered [
7,
8]. In addition, the charging time can be considered a problem of the BEV, because the modern batteries require 20 minutes to charge up to the 80%, which is still a long time compared to the current ICE vehicles. In order to overcome the problems caused by the limited driving range and long charging time, researchers are currently conducting intense studies in the field of wireless power transfer (WPT). The use of a WPT system to perform the charge of the EVs would make it possible to increase the driving range of the vehicles and also decrease the size of the on-board batteries. This is a consequence of the fact that with the WPT it is possible to maximize the charging opportunities without the need of a contact. Indeed, it is estimated that with a 10 minute recharge using the WPT method at a charging rate of 50 kW, the EV can drive for 37 km, which is the distance that an average European driver travels daily [
8,
9,
10]. The current technology applied for the WPT systems is inductive power transfer (IPT), which is preferred to other methods because they are better for short distance applications, they generate less harmful fields, and they allow the use of industrial power converters that make the overall system more reliable and efficient [
11]. The WPT can be classified as either static or dynamic wireless power transfer, based on the possibility of the EV to perform the recharge during stops or also when the vehicle is in motion, as shown in
Figure 1.
The most promising system is the dynamic WPT, because the possibility of its performing the recharge while in motion, thereby increasing the EV’s driving range while decreasing the size of on-board batteries, potentially enhances the system’s advantages. The main drawbacks of the dynamic wireless charge (DWC) system are that it requires more expensive infrastructure and higher installation costs. The DWC can be further categorized in stretched track or lumped track, based on their track structure. The stretched track is characterized by a coil, or wire, that is particularly long on the moving direction. This grants an almost constant coupling factor between the transmitter and receiving sides along the track. The main problem of this solution is that, while constant, the coupling factor does not attain high values and for this reason, the system is affected by poor efficiency. This is the reason why the lumped track is generally preferred over the stretched solution. The structure of this track is composed of many small coils, called pads, in series, that are independently regulated using different power converters. With this method, it is possible to achieve higher values of the coupling factor, although with the drawback of a higher infrastructural cost and pulsating shape of the coupling factor while moving along the tracks [
4,
12,
13,
14,
15].
This work introduces the main pad topologies applied for the DWC with a lumped track and further performs an analysis based on the results obtained through FEM simulations. The FEM simulations are conducted with the use of the software Ansys® Maxwell that provided the values of the coupling coefficients for every configuration investigated.
The remainder of the manuscript is organized as follows:
Section 2 describes in detail different pad topologies of the magnetic couplers for the field of the WPT.
Section 3 provides the design of the prototypes including the modelling approach and a thorough explanation of the methodology. In
Section 4, details of the simulation results are provided followed by their discussions; finally,
Section 5 presents the main conclusions drawn in this paper.
3. Design of the Pad Prototypes
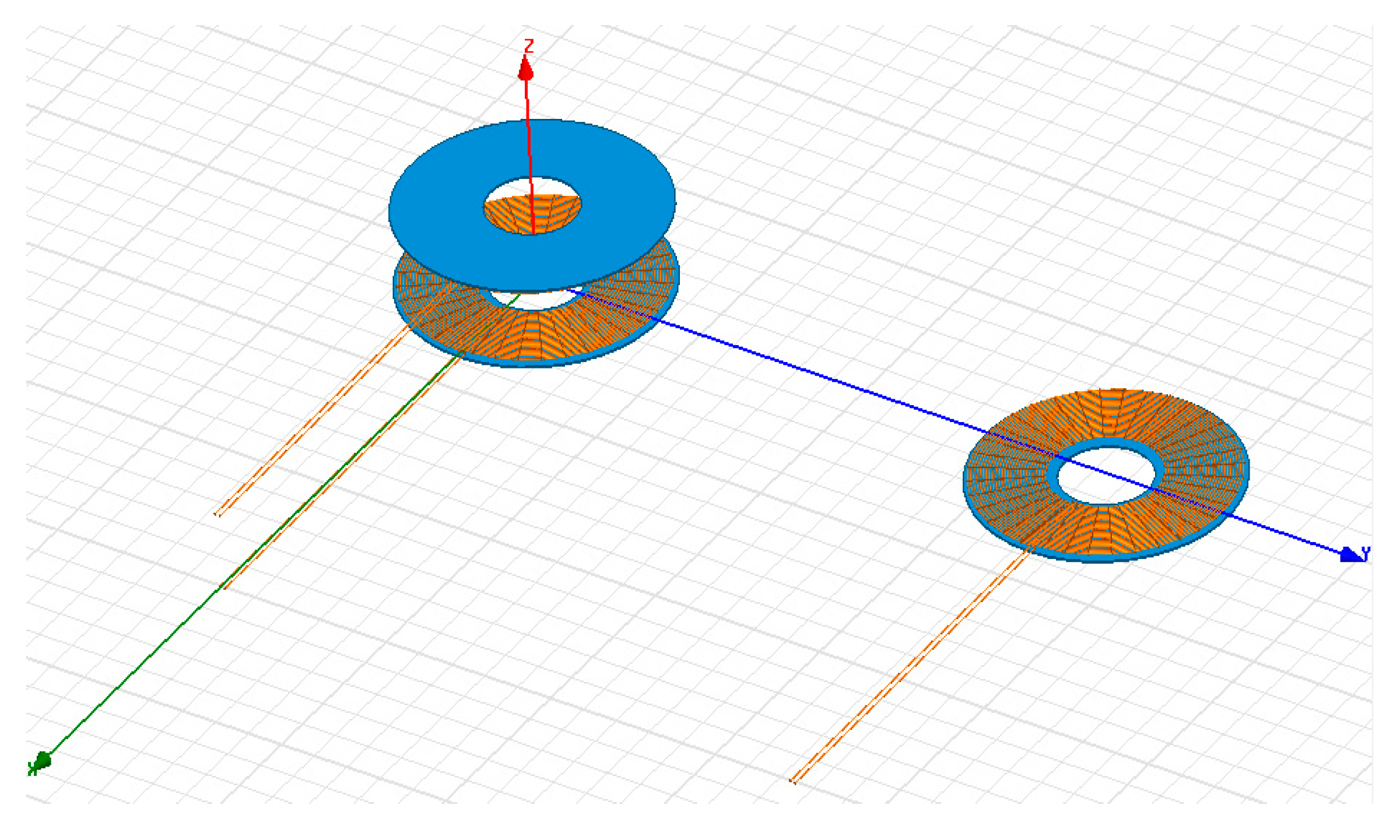
The objective of the analysis is to use the finite element method approach for a preliminary study of the best pad configuration that can be applied for a DWC with a lumped track. The geometries that are modelled and analyzed in ANSYS® Maxwell are the circular pad, the double-D pad, and the DDQ pad. These pads are at first coupled in a homogeneous way, such as a CP–CP configuration, and then are combined in order to obtain the different values of the coupling coefficients that will help us in the choice of the best configuration. The computing machine chosen for the simulations is an Asus® ROG with an Intel® core i7700 3.6 GHz processor, 16 Gb of RAM, and a dedicated GTX 1050 4 Gb graphic card. Before the start of the analysis, it is necessary to define the method and the procedure used in the design of the models for the simulation. The idea is to study the change in the coupling factor when the receiving side (Rx) is moving upon two different pads in the transmitting side (Tx), as shown in
Figure 8.
These pads, whose characteristics are reported in
Table 1, have a design that can be challenging for a computing machine, especially because the building of the mesh for the coil that is characterized by a short distance between every turn is complex and time-consuming. Consequently, it is necessary to make some assumptions and simplifications that can make the simulations less challenging and faster.
A first assumption can be made starting with an analysis on how the Rx pad moves along the track. The power exchanged between the primary and secondary sides is expressed as follows:
where
and
are the mutual inductances between the pick-up coil and the two respective transmitting coils,
is the load attached to the pick-up coil,
is the current that flows in the transmitting coils, and
is the angular frequency of the current. From the expression it is highlighted how the power exchanged between couplers depends on the mutual inductances that are a function of the distance
x. The mutual inductance is composed of two terms: a first one that represents the static component, which is also called transformer component, and a second one that represents the motion component, which is a function of the distance
x. As demonstrated in Reference [
12], the motion component is negligible when compared to the transformer component. Therefore, it is not necessary to perform a simulation with a transient solution, which requires more computational power. However, it is possible to perform a sweep-analysis with an eddy current solution, where the distance between the Rx and the Txs along the x-axis is changed with the start when the receiver is perfectly aligned with the first transmitter and the stop when the receiver is perfectly aligned with the second transmitter. Moreover, there is the possibility to perform a further simplification by changing the geometry of the pads, making them less difficult to mesh for the computing machine.
According to Ampere’s law, the magnetic field is related to the current density (
J) in the coil and not with any geometric parameter:
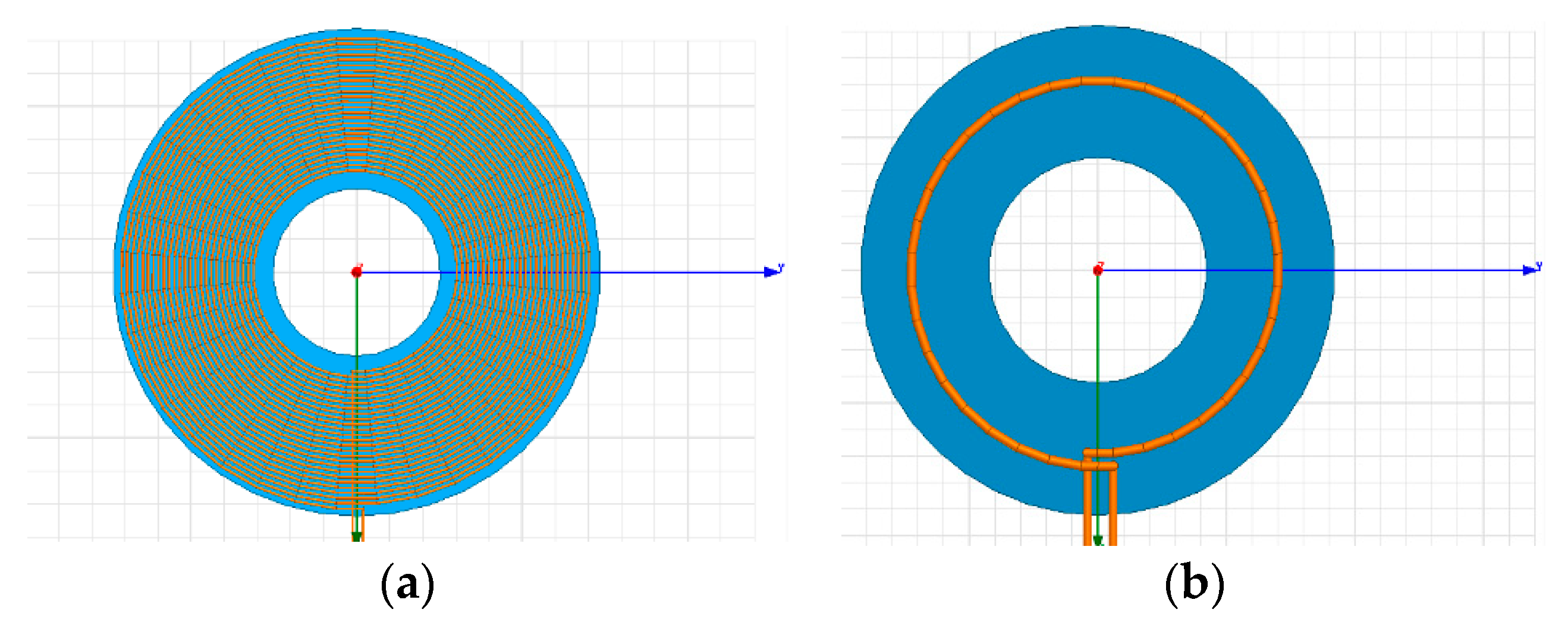
Therefore, it is possible to simplify the pads used in the simulation by substituting the 20-turns with 4 mm of copper wire diameter pad with a new one consisting of a single turn that can grant the same current density as the previous one, as shown in
Figure 9.
The new pad will have then a radius equal to 8.95 mm due to the following relation:
where
is the radius of the conductor of the new pad,
is the radius of the conductor of the previous pad,
is the area of the section of the conductor of the new pad, and as last
is the total area of the section of all the conductors of the old pad.
Furthermore, in order to grant the same total current density in both the cases, it is necessary to increase the excitation current of the new and simplified CP up to 400 A. With a wire of this size, it is necessary to take into account that the eddy effect and the displacement currents would reach high values and, as a consequence, their effect will be removed from the simulation. The drawback of this design choice is that the mutual and auto inductances that will be computed by ANSYS® Maxwell are not the same as the original pads that would be used in a real scenario. This can be easily verified by observing the expression of the inductance of an ideal solenoid:
where
is the permeability of the material,
is the number of turns of the coil,
is the area of the section of the coil, and as last,
is the length of the coil.
As it can be seen, the inductance is proportional to the square of the number of turns, and as a consequence the simplified pad proposed, due to the fact that it is characterized by a single turn, has a value of the inductances that is approximately reduced by a factor of 202 when compared to the real case. Despite this, the simplifications do not affect the coupling coefficients that will be obtained, because of its independence from the number of turns making the results coherent and close to the values found in the literature.
All the pad topologies that are analyzed in the simulation are subject of the assumptions and simplifications outlined in the previous paragraph. Other important parameters that define all the models are: (i) the air-gap between the transmitting and receiving side, (ii) the distance between the transmitting coils, and (iii) the position of the receiver along the moving direction, also called Offset. The air-gap was set to 200 mm, which is inside the common vehicle range of 175–220 mm gap, and which ensures the minimum gap for the safety operations of 10 cm. Regarding the distance between the transmitting coils, a distance greater was chosen than the dimension of the pad on the moving direction, so that the mutual inductances between the coils could be neglected, as reported in Reference [
16]. Considering a diameter of 700 mm for the pads, the distance was set to 1 m because it represents a good trade-off that can guarantee enough distance to have a low coupling factor between transmitting coils, while having a uniform power transmission. As last, the Offset parameter was set as an array of discrete values that will simulate the position of the Rx along the moving direction. This analysis is called sweep-analysis and it was chosen due to the decision to neglect the motion component of the mutual inductances. The excitation current of all the pads that will be simulated is 400 A for both the transmitter and the receiver side. Finally, the operating frequency set in the solver was 20 kHz, and the chosen solution type was the eddy current solution that will give us the values of the coupling coefficients for every step of the Offset once the simulation is over.
4. Results and Discussion
In this section, the results obtained for six pad configurations that can be utilized for a DWC with a lumped track are reported. These consist of the coupling coefficients for each configuration and their trend as a function of the Offset and Lateral Misalignment.
4.1. CP–CP Configuration
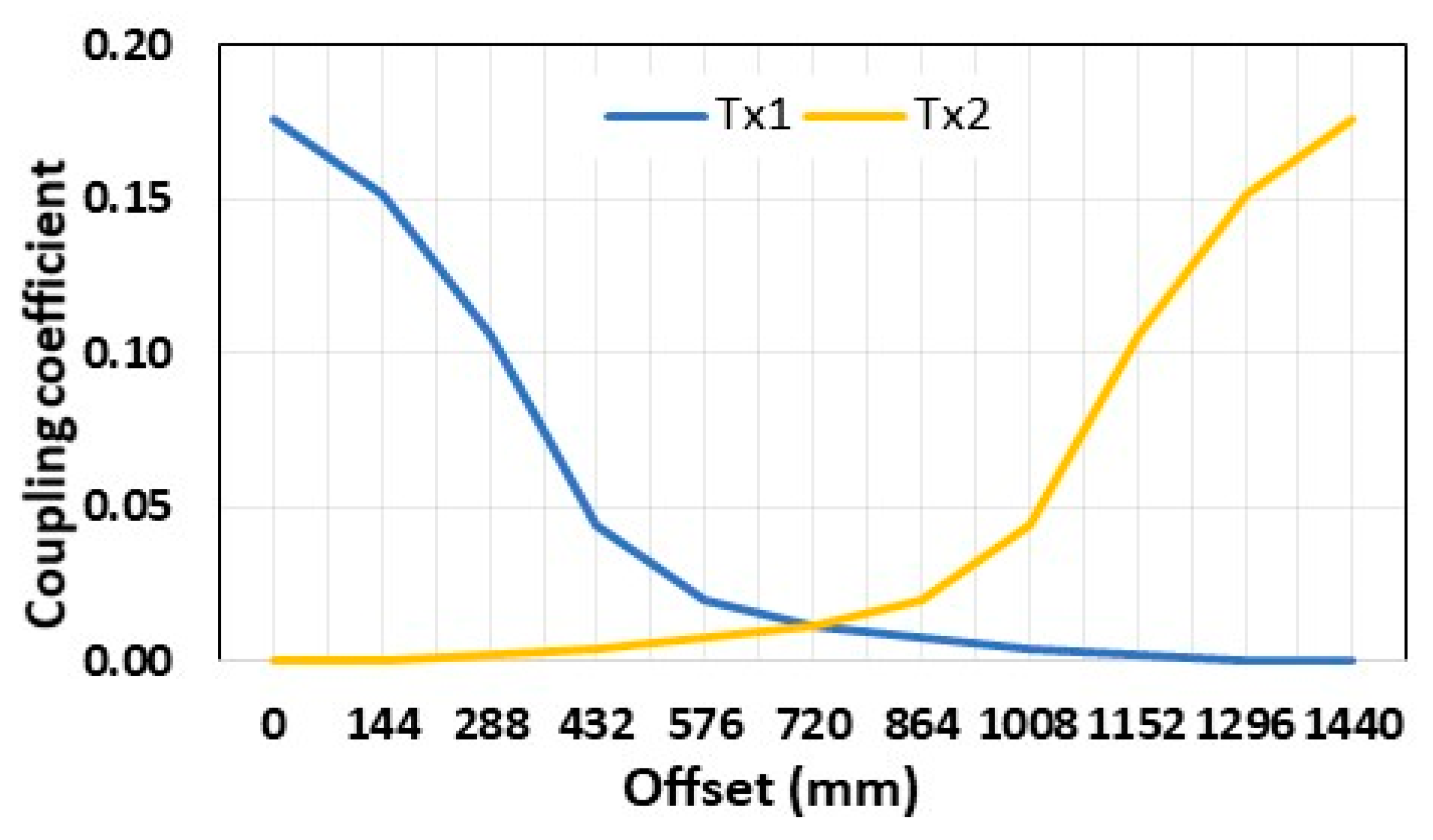
In
Figure 10, the values of the coefficient k for all the computed values of the Offset are reported, then a first analysis of the results can be performed. It can be seen that for a value of the Offset equal to zero, i.e., when the Rx pad is perfectly aligned with the first Tx pad, their coupling coefficient k(Tx1) has a value equal to approximately 0.154, which is a value close to the results obtained in Reference [
20].
When the Offset starts to increase, the coupling coefficient decreases its value rapidly, reaching the value of zero at 0.5 m, leaving the receiver pad decoupled from any source of power until the Offset reach the value of 1.15 m, where the Rx starts to couple with the secondary transmitter k(Tx2). In
Figure 11a, the magnitude of B is plotted on the XY section between the couplers, and it highlights how the magnetic flux does not spread either on the x or
y-axis but has a vertical symmetry and a focused vertical distribution, an observation supported also in
Figure 11b.
This makes the overall distribution area pretty small, which therefore causes the coupling coefficients of the pads to significantly drop when they are not perfectly aligned. From the obtained results, it is clear that a CP–CP configuration, while capable of reaching a good coupling factor at a 200 mm air-gap for a WPT application, has poor behavior when the couplers are misaligned, making the configuration not the best choice for a DWC system, where the couplers are misaligned most of the time.
4.2. DD–DD Configuration
Figure 12 shows the model of the 720 × 440 mm size DD pad used for the simulations. The simulation results reported in
Figure 13 confirm the better behavior of the DD pad for a dynamic wireless power transfer application. When perfectly aligned, the coupling coefficient between Tx and Rx, called k(Tx1), has a value of approximately 0.176, which is higher than that obtained in the CP–CP case. Furthermore, when the value of the Offset increases, the coefficient k does not considerably drop as in the previous case, allowing a more homogeneous power exchange between the transmitting and receiving side because there are no points in which the receiver is completely decoupled from both the first and the second transmitter.
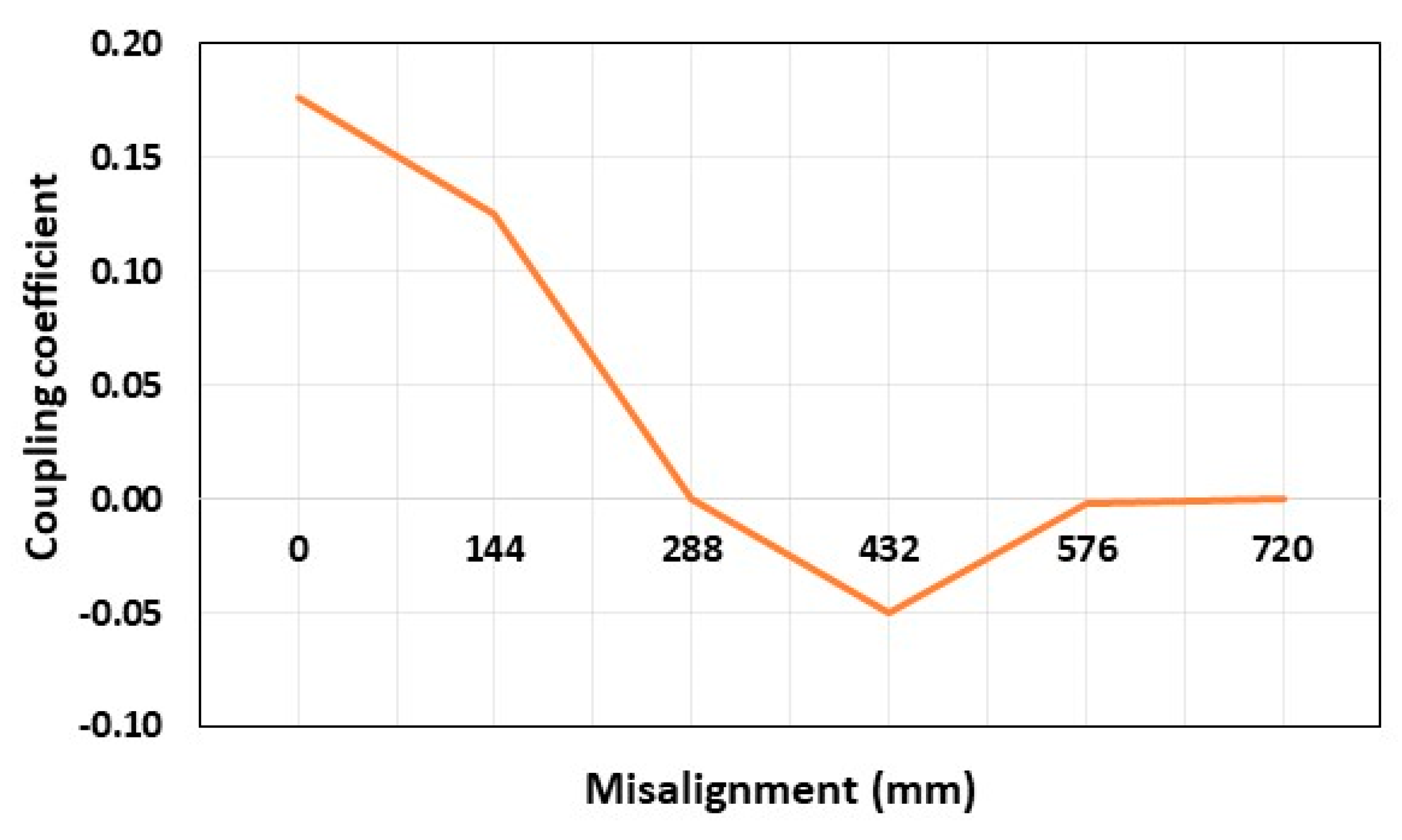
Figure 14 presents the plot of the coupling coefficient as a function of the Lateral Misalignment. It can be seen that the coupling factor has a null point at around 40% of the length of the pad, a value that differs from the 34% found in the literature. This difference is due to the simplified model adopted in the numerical simulation, with also a different geometry having a slight effect on the results obtained.
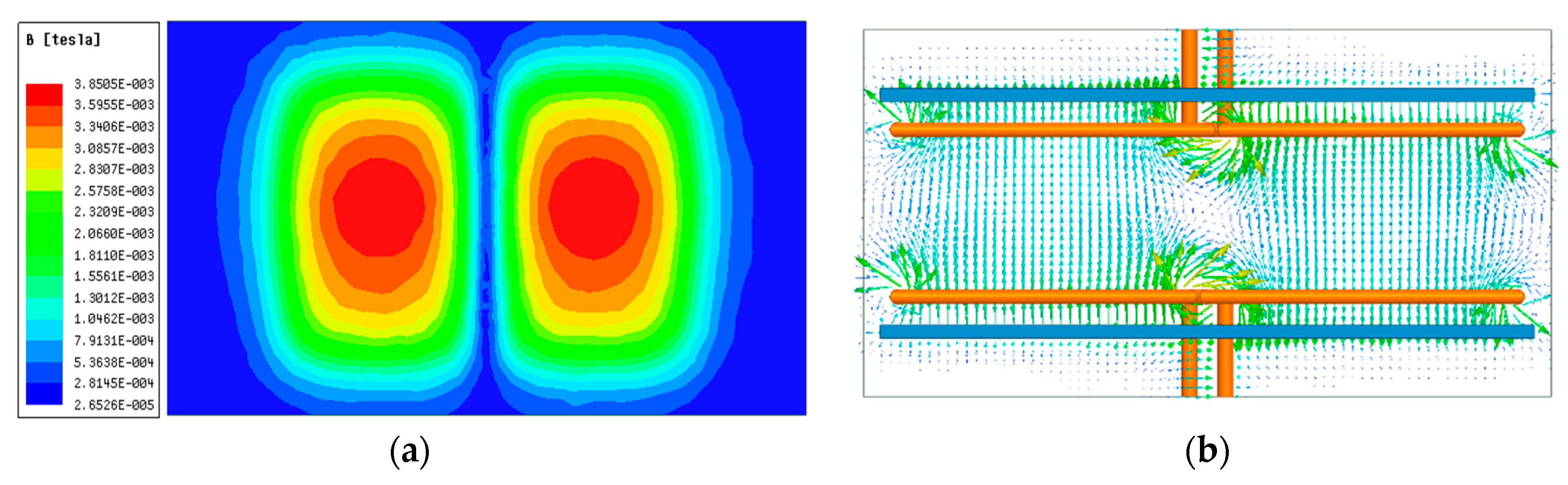
Moreover, based on the distribution area of the magnetic field depicted in
Figure 15a, it can be seen to have improved when compared with the CP–CP case. From this, it follows a greater charge area for the pad and better behavior when the pads are not aligned. Another important characteristic of the DD pad can be studied starting from the plot of the B-vector illustrated in
Figure 15b, where the bipolar behavior and the flux-pipe intrapad area can be easily recognized.
Note that in our model, the intrapad area does not have a high contribution due to its reduced size, which is a consequence of the reduction in the number of turns, but it can still be observed how this pad can behave like a composition of two circular pad and a double-sided flux-pipe pad. Regarding the bipolar behavior of the coupler, the latter generates a stronger B field in the area above the pad, which results in a higher coupling factor; however, it decreases the Lateral Misalignment tolerance (along the y-axis).
4.3. DDQ–DDQ Configuration
Figure 16 presents the simplified model implemented in the simulations. This model differs from the previous DD pad because it has in addition a quadrature coil with a 500 × 440 mm
2 size.
Figure 17 shows the simulation results of the evolution of the different coupling coefficients as a function of the Offset. As expected, the values of the coefficient k between the DD coil of the receiver pad and the DD coil of the transmitting side (Tx–Rx(DD–DD)) follow the same trend obtained for the DD–DD configuration. It is interesting to note that in addition to the DD–DD contribute, there is now also the Q–Q contribution (Tx–Rx(Q–Q)) that increases the overall efficiency of the exchange of power. This new contribution has a value of 0.10 at its peak, and it reaches the value of zero faster when compared to the DD–DD one, but it has been added mainly to increase the power exchange when there is a Lateral Misalignment between pads. Moreover, it can also be seen how the DD–Q contribution (Tx–Rx (DD–Q)) can almost be neglected because the flux that the quadrature coil generates is collected by the DD coil in a symmetrical way, and as a consequence, the flux that interacts with the positive pole is the same as the flux that interacts with the negative pole, making then the overall collected flux at the DD coil close to zero.
This can be noticed in
Figure 18a, where it can be seen that the pole of the DD coil of the receiver couples in a constructive manner with the Q coil of the transmitter. The other pole couples in a destructive way, decreasing the magnitude of the B field, because the vector of the field generated by the DD and Q coils have the same direction but on an opposite verse, as shown in
Figure 18b.
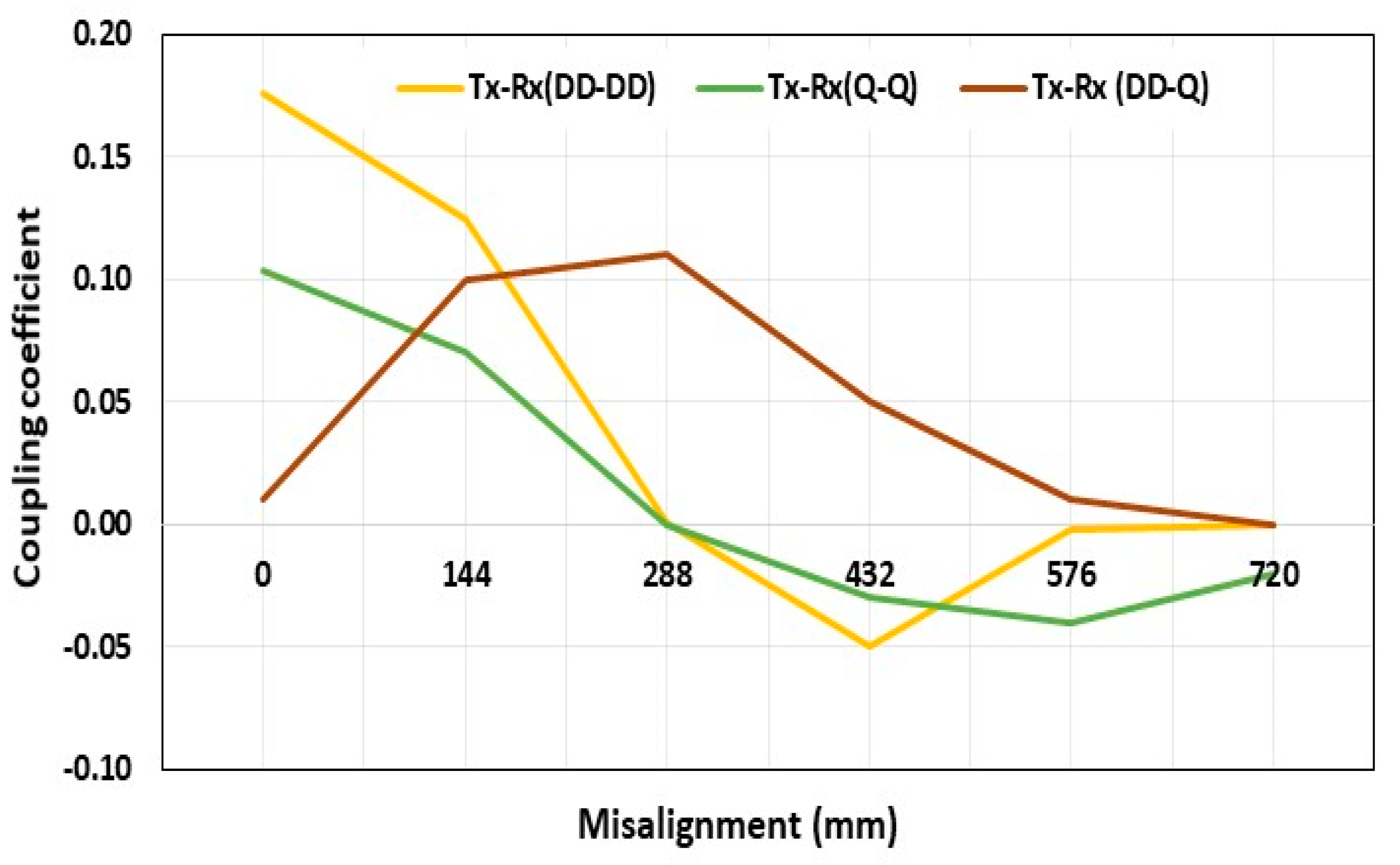
Another important analysis can be done based on the results shown in
Figure 19, where the trend of different coupling factors as a function of the Lateral Misalignment is presented.
As expected, the coupling factor between the DD coil of the Rx and the DD coil of the Tx (Tx–Rx (DD–DD)) has the same behavior of the DD–DD configuration presented in
Figure 6. The Q–Q contribution (Tx–Rx (Q–Q)), while having an effect on the power exchange for perfect alignment, does not have an important contribution on the Lateral Misalignment because the coefficient k reaches the value of zero almost at the same distance as for the Tx–Rx (DD–DD). What make the DDQ pad more performant than the DD pad, when there is a Lateral Misalignment, is the DD–Q contribution (Tx–Rx (DD–Q)) that keep the Tx and Rx pads coupled for a wider range of Lateral Misalignment values, reaching the value of zero for a Lateral Misalignment of 625 mm. This proves that the quadrature coil added to the DD coil has an important effect on the performance of the pad, making it more efficient when misaligned and improving the overall coupling coefficient value of the pads, with a consequent increase in the efficiency of the system.
4.4. CP–DD Configuration
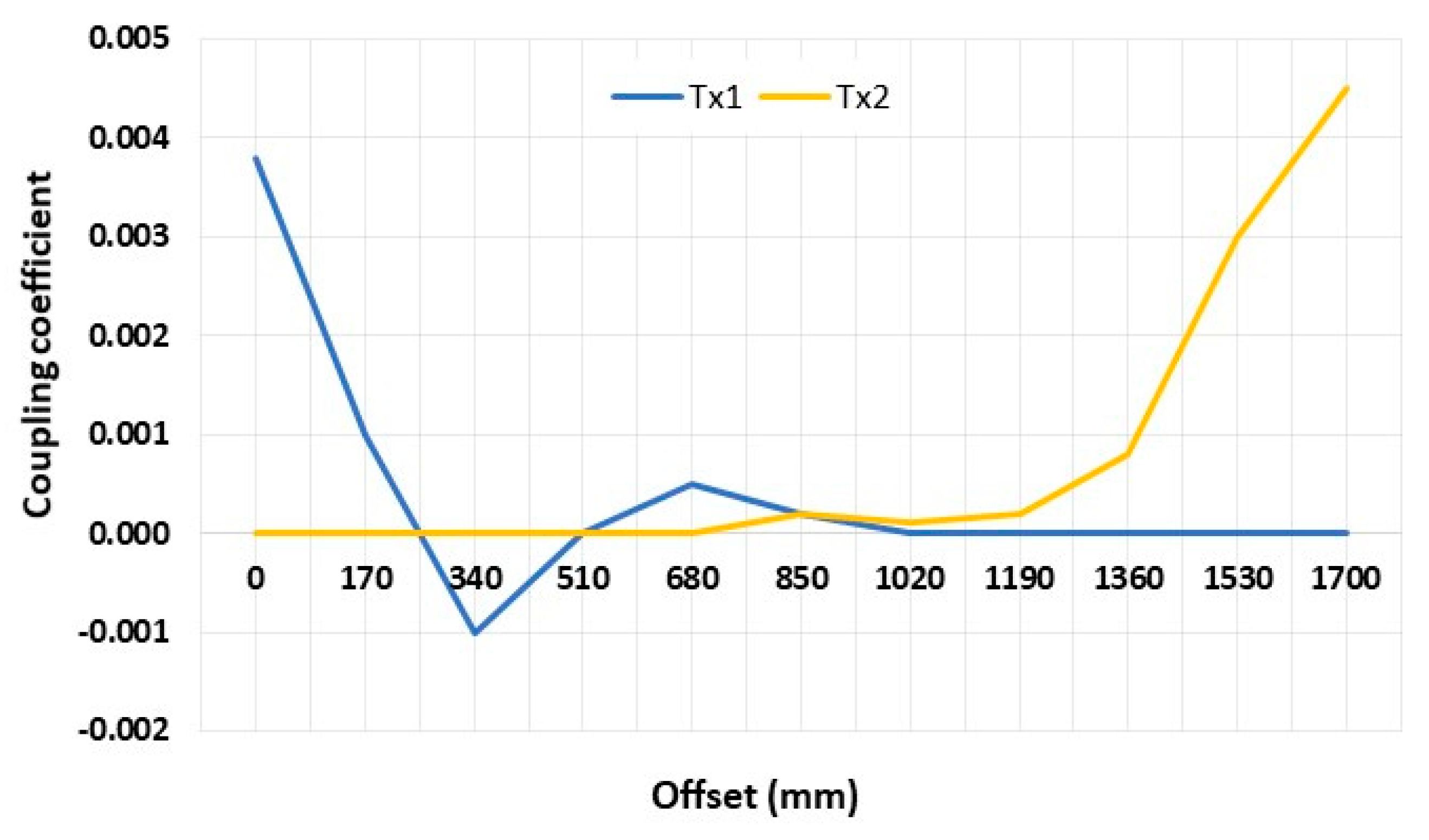
Now that all the modelled pads and their features have been introduced, it is time to perform analysis with mixed configurations, which means, two different geometries for the Tx and the Rx. The goal is to analyze all the possible configurations with the introduced pads, in order to find the most performant one for a DWC application. The first combination that is analyzed is the CP–DD configuration, where a circular pad is used in the transmitter array and a DD pad is used as a receiver. The results of the simulation are depicted in
Figure 20. From the plot, it can be seen that the coupling coefficient between the receiver and the first transmitter, called k(Tx1), has a value of 0.004, which is very low when compared to the previous results, even when the pads are perfectly aligned.
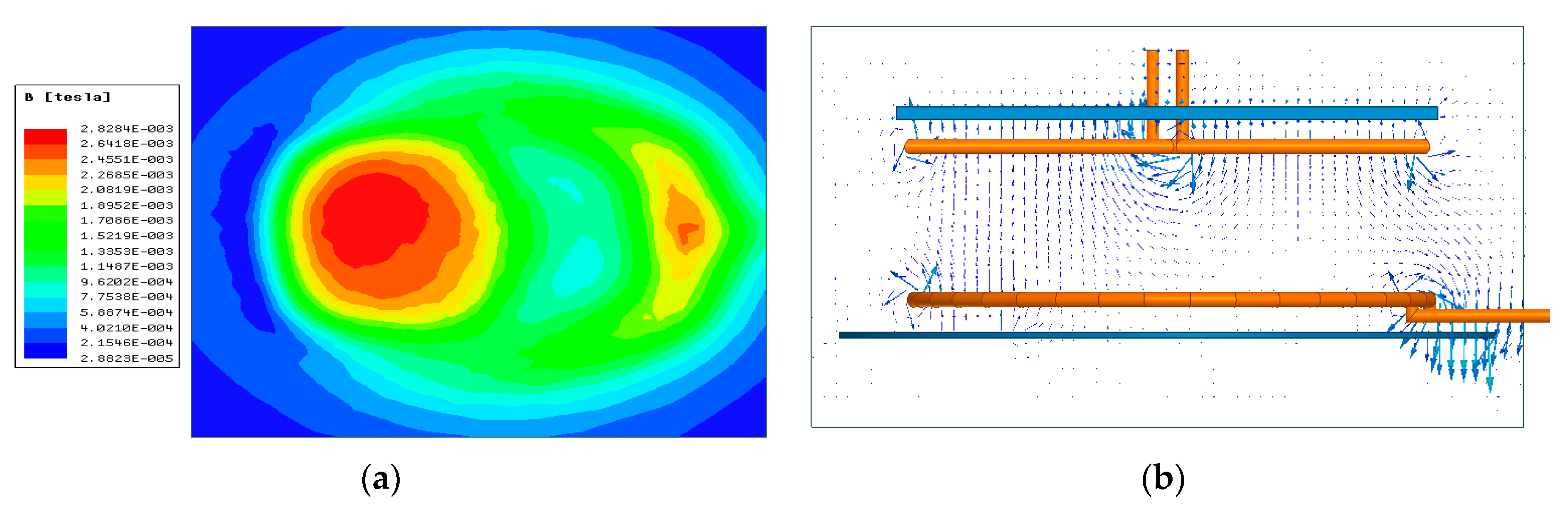
The same outcome is true also for the coupling coefficient between the receiver and the second transmitter, which slightly differs from k(Tx1) because the simulation did not reach the convergence in all the Offset values. These results show that it is clear that this configuration is not suitable for a wireless power transfer application, neither for a static nor for a dynamic one. The reason of the low coupling coefficient is that the magnetic flux generated by the CP pad is collected from both the positive and negative poles of the DD pad in an equal manner, making the resultant magnetic flux collected close to zero. This can be seen in
Figure 21, where the interaction between the pads is noticeable and the constructive coupled pole can be distinguished by the destructive coupled pole.
Overall, the performance of the CP–DD configuration can be considered negative and not suitable for a WPT application because of the low coupling factor, making the exchange of power not efficient.
4.5. CP–DDQ Configuration
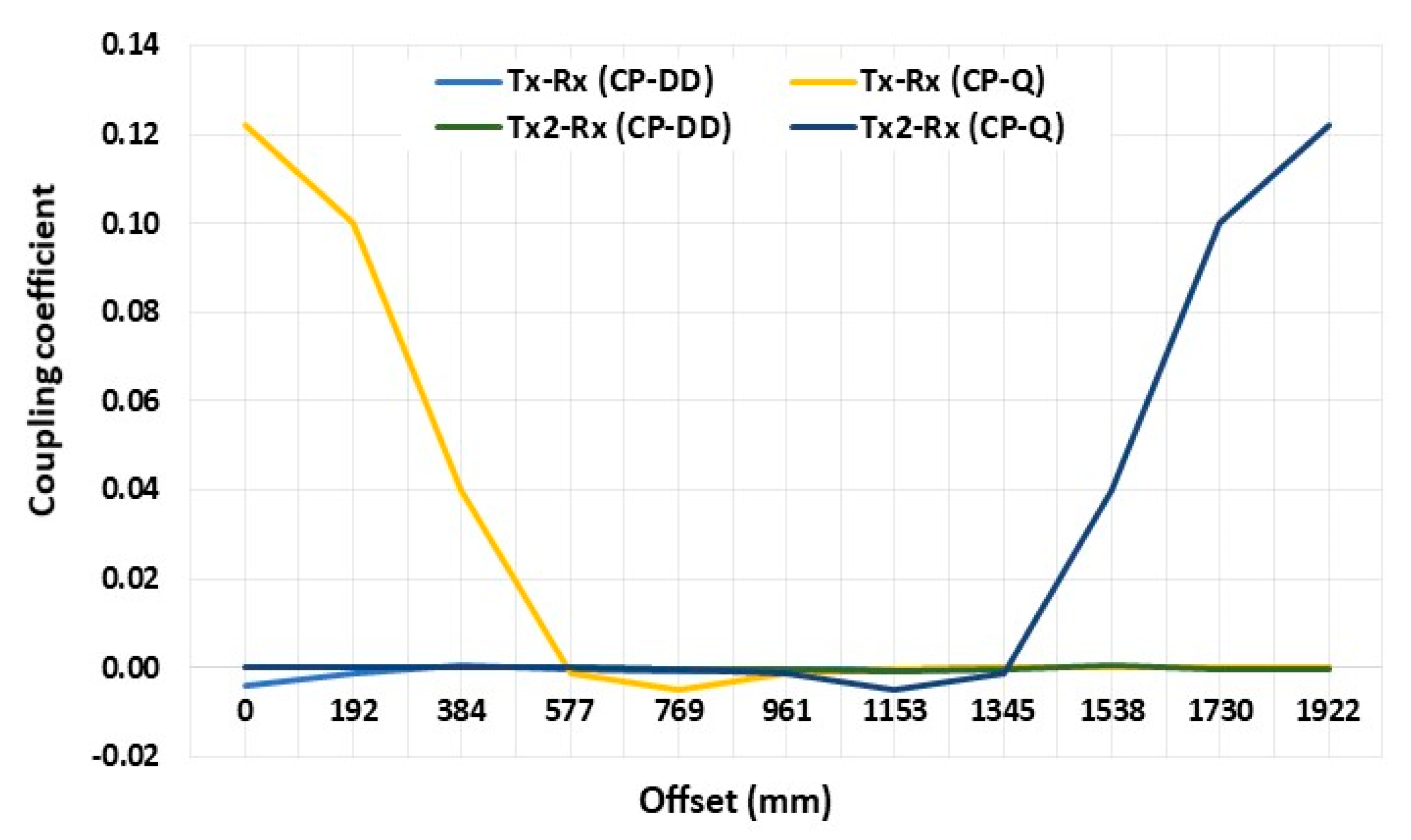
The configuration that will be analyzed next is the CP–DDQ configuration, where the circular pad is used for the transmitter array while the DDQ pad is used as a receiver. The results of the sweep-analysis are depicted in
Figure 22 and shows that there are two contributions that describe the coupling behavior between pads: a first term that describes the CP–DD coupling and a second term that describes the CP–Q coupling.
As obtained in the DD–CP and in the CP–DD cases, also in this configuration, the CP–DD term has a value that is close to zero for every step of the analysis, which means that it does not have a real contribution in the power exchange. On the other side, the coupling coefficient between the first transmitter and the quadrature coil of the receiver, called Tx–Rx (CP–Q), has a value close to 0.13 when the pads are perfectly aligned. This value rapidly decreases when the value of the Offset starts to increase, reaching the value of zero for an Offset of 0.55 m. The receiver will start to couple with the second transmitter for an Offset of 1.35 m, leaving then the secondary pad without any coupling source for a distance of 0.8 m. The improvement in the coupling between pads can be seen also in
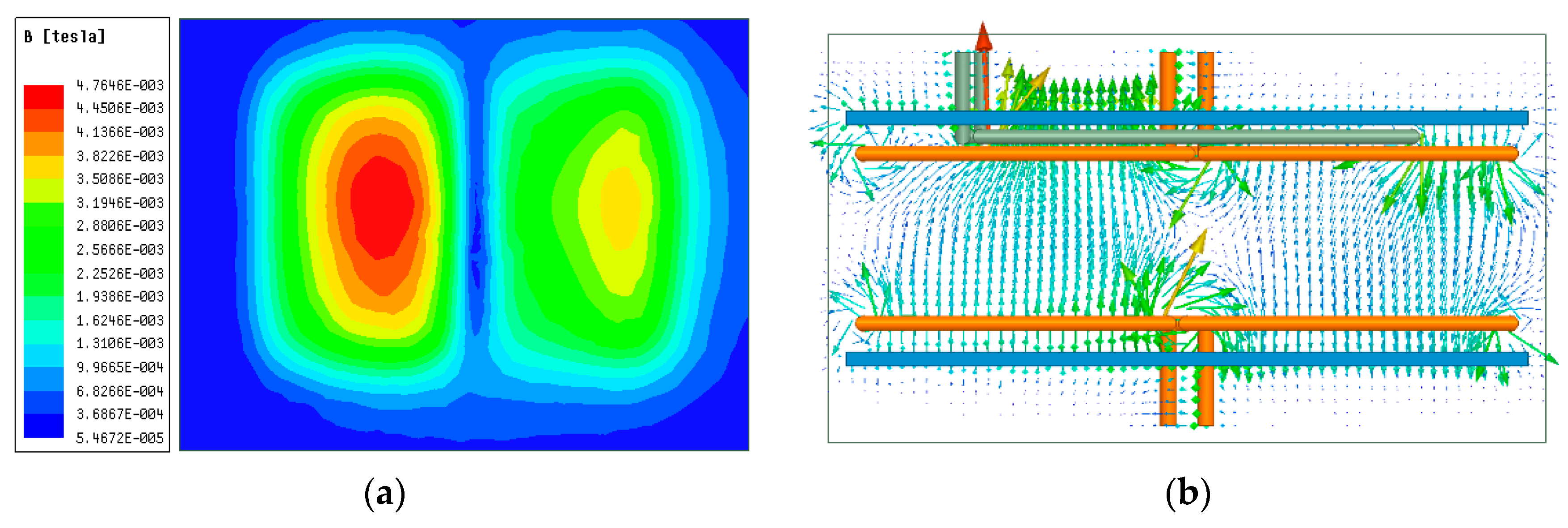
Figure 23, where the magnitude and the vector plot of the B-field are shown. The plot in
Figure 23a shows a similar distribution area observed in the DD–CP and CP–DD cases, with the difference of an improvement in the magnitude of the field. In the area between the constructive poles, the magnetic field reaches now the value 3.711 × 10
–3 T, while in the CP–DD case the value was 2.8284 × 10
–3 T. The vector plot of the field, seen in
Figure 23b, is overall similar to the one obtained in the DD–CP and CP–DD cases, which means that with a higher magnitude of the B-field and the same area of the surface, the magnetic flux chained to the receiver is improved. This improvement of the magnetic flux has an effect in the induced voltage, which in turn has an effect in the power at the secondary side of the system, the receiving side.
One last analysis can be performed on the misalignment tolerance along the
y-axis of the configuration; the values of the coupling coefficient as a function of the misalignment are shown in
Figure 24.
From the
Figure 24, it can be seen that the coupling coefficient between the transmitter and the DD coil of the receiver, called Tx–Rx (CP–DD), has a value of zero when the pads are perfectly aligned, but it reach a value of –0.09 for a misalignment of 0.4 meters. This contribution has a negative effect on the coupling between pads because for a misalignment value of 0.4 meters the CP transmitter is coupled mainly with the positive pole of the DD coil, which has a destructive effect on the coupling coefficient, as already shown in the analysis of the B-field distribution between the pads. A solution could be to tune the current that flows in the DD pad of the receiver in order to decrease its value when the pads are misaligned and decrease, therefore, the negative effect of the coupling factor between the CP and DD coils. The coupling coefficient Tx–Rx (CP–Q) between the transmitting pad and the Q coil of the receiver has instead a value of 0.13 when the pads are perfectly aligned, and it decreases until it reaches a value of zero for a misalignment of 0.4 meters. Therefore, it can be stated then that the CP–DDQ configuration is characterized by a flexible behavior that allows the exchange of power when the pads are misaligned along the
y-axis, but it is necessary to avoid the destructive contribute of the Tx–Rx (CP–DD) by the appropriate control of the currents in the DD coil of the receiver.
4.6. DD–DDQ Configuration
The final configuration examined is the DD–DDQ configuration, where the primary array is composed of DD pads and the receiver is the DDQ pad, all of them with the size introduced in the previous cases. The results obtained from the simulation for every step of the Offset are depicted in
Figure 25.
As shown in
Figure 25, the trend of the coupling factor between the DD coil of the receiver and the first transmitter, called Tx–Rx (DD–DD), is equal to what obtained in the DD–DD case, with a peak value of 0.18 when the pads are perfectly aligned. In addition, the coupling coefficient Tx2–Rx (DD–DD) follows the same trend as for the DD–DD case, allowing the receiver to be coupled with the transmitting pads for every step of the Offset, because of the x-axis misalignment tolerance of the pads. It is also important to highlight that the results are close to the DD–DD pad because the interaction between the DD and Q coils of the receiver is minimized due to its geometric design. Furthermore, the results give us also information on the coupling coefficients between the Q coil and the transmitters, which are characterized by a value close to zero for every value of the Offset. This lack of interaction between the quadrature coil and the DD pad used as a transmitter can be explained starting from an analysis of the magnetic field distribution between the pads.
Figure 26a shows the distribution of the B-field along the XY section between the pads, and it highlights the bipolar behavior of the pads used. A particularity is that one pole is characterized by a higher magnitude of B-field when compared to the other.
This is because one pole couples in a constructive way with the quadrature coil while the other couples in a destructive way with the quadrature coil, similar to what happened in all the previous cases with a bipolar pad used in the configuration. A further demonstration of the lack of interactions between the DD transmitter and the Q coil at the receiver is obtainable by the observation of
Figure 26b, where the plot of the B-field vector over the YZ section is depicted. In the figure, the pole on the left can be distinguished, where the coils interact in a constructive way, and the pole on the right, where the pole is coupled in a destructive way. Starting from the definition of magnetic flux,
where
is the area of the surface that chains the magnetic flux, it is easy to understand the effect of the DD coil on the quadrature coil used as a receiver. The amount of magnetic flux with positive direction chained to the area of the surface of the quadrature coil is equal to the amount of magnetic flux with a negative direction. The total magnetic flux chained (
$tot
$) is composed of two contributions, a positive and a negative one, which have an equal magnitude, making its value close to zero. With a null magnetic flux chained to its surface area, the induced voltage on the quadrature coil is zero, according to the Faraday’s law (Equation (5)), making the interaction between the DD coil and the Q coil equal to zero. In other words, the negative pole of the Q coil interacts with both the positive and negative pole of the DD pad in an equal measure, generating an area where the couple is constructive that has the same magnitude of the area where the couple is destructive, with a consequent overall coupling factor between these coils close to zero.
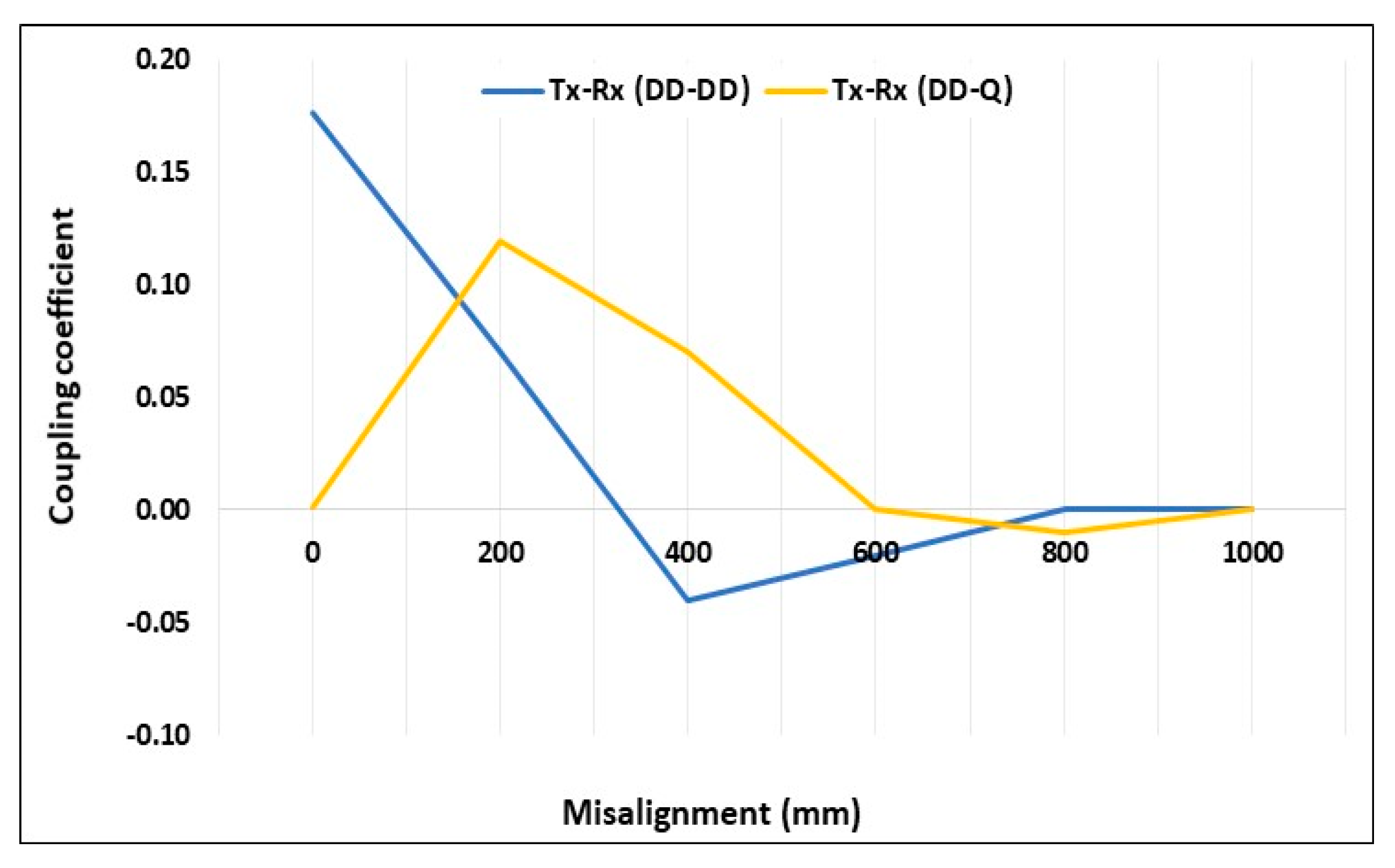
Now that the behavior of the configuration when the Rx pad is moving along the x-axis is determined, it is important to analyze also the performance when the pads are misaligned along the
y-axis. The results of the simulation for different values of the misalignment are shown in
Figure 27 and depict a trend in the coupling coefficient values similar to what was obtained for the DDQ–DDQ configuration.
The coupling coefficient Tx–Rx (DD–DD), which is the coupling coefficient between the DD pad of the receiver and the DD pad of the transmitter, reaches a value of zero for a misalignment of 0.320 meters. This value is lower than the one found for the CP–DDQ configuration and highlights the sensibility to the misalignment of the DD–DD coupling. The contribution of the coefficient Tx–Rx (DD–Q) between the quadrature coil and the transmitter is what makes this configuration efficient and performant also for high values of misalignment. Indeed, this coupling factor has a value close to zero when the pads are perfectly aligned, as previously discussed, but it increases its value for an increase in the misalignment, with a maximum around 0.200 m. After the maximum is reached, the value decreases with a zero point at a misalignment of 0.600 m, which is greater than the value obtained for the DD–DD component of the pad.
5. Conclusions
The results obtained from this analysis are useful to determine the design that is considered the best configuration for a DWC application. The CP–CP configuration is characterized by the lowest coupling factor when perfectly aligned, with a value of 0.154, and a non-optimal Offset and Lateral Misalignment tolerance. On the other hand, the design of the circular pad is easier, compared to the DD and DDQ pads, and its cost is not very high, making the CP topology a good option for the application to the WPT system. The main drawbacks of the CP–CP configuration are compensated in the DD–DD configuration, where the value of the coupling factor is now 0.176, and the Offset tolerance is highly improved. The Offset tolerance is particularly important for a DWC system because the Rx pad is often misaligned along the x-axis and as a result, the choice of the pad with a good Offset misalignment is considered crucial for a homogeneous power exchange. The DD pad is not the best choice because of its poor tolerance for Lateral Misalignment, which is even worse than that of the CP pad, with undesirable consequences on the power exchange if the Rx and Tx pads are misaligned along the y-axis. For this reason, the DDQ pad can be considered an improvement on the previous DD topology. Indeed, the addition of the quadrature coil ameliorates the misalignment along the y-axis due to the DD–Q interaction between the primary and secondary side. Therefore, the DDQ–DDQ configuration can be considered the most performant configuration, with a coupling coefficient DD–DD of 0.176, a coupling coefficient Q–Q of 0.10, and a good misalignment tolerance on both the x and y-axes. The main drawback of this solution is its higher cost and its complicated design. The DDQ pad uses more copper compared to the DD and the CP pads, and its main advantages originate from the fact that the DD and the Q coil are decoupled and can be tuned differently using different power converters. The need for two converters is what makes the DDQ pad expensive and for this reason, it is important to find a configuration characterized by the same behavior of the DDQ–DDQ one but with a comparatively lower overall cost. The first solution explored is the CP–DD configuration but, from analysis of the results, it is evident that this configuration cannot work for any WPT application. The use of a bipolar pad coupled with a unipolar pad results in a coupling factor close to zero, thus rendering the configuration unusable. When the DDQ pad is used instead of the DD one, the coupling coefficient now is composed of two components: the CP–DD component, which has a value still close to zero, and the CP–Q component, which has a value of 0.13. While the overall configuration still has the ability to work, the performance is not close to the DDQ–DDQ configuration due to a lower value of the coupling coefficient and a bad Offset and Lateral Misalignment tolerance. The last configuration used is the DD–DDQ one, where the DDQ pad is installed at the car’s side. The choice of the DDQ pad at the secondary side is for economic reasons. It is more convenient to install the DDQ pad at the secondary side because it requires more power converters and it is more expensive overall, and consequently, it would not be feasible to have an entire array track composed of these pads. Regarding the performance of the configuration, the coupling coefficient is also composed of two terms: a DD–DD term and a DD–Q term. The first term has a value of 0.176, as in the previous configuration, while the second term has a value close to zero for the same reasons as for the CP–DD configuration. The misalignment tolerance on the x and y-axis is really close to the results obtained for the DDQ–DDQ pad.
In conclusion, the results establish that the best trade-off between performance and economic feasibility is the DD–DDQ pad, which is characterized by the best values of coupling coefficient and misalignment tolerance, without the need for two power converters for each side, as in the DDQ–DDQ configuration.

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}