Dynamic Emulation of a PEM Electrolyzer by Time Constant Based Exponential Model



Abstract
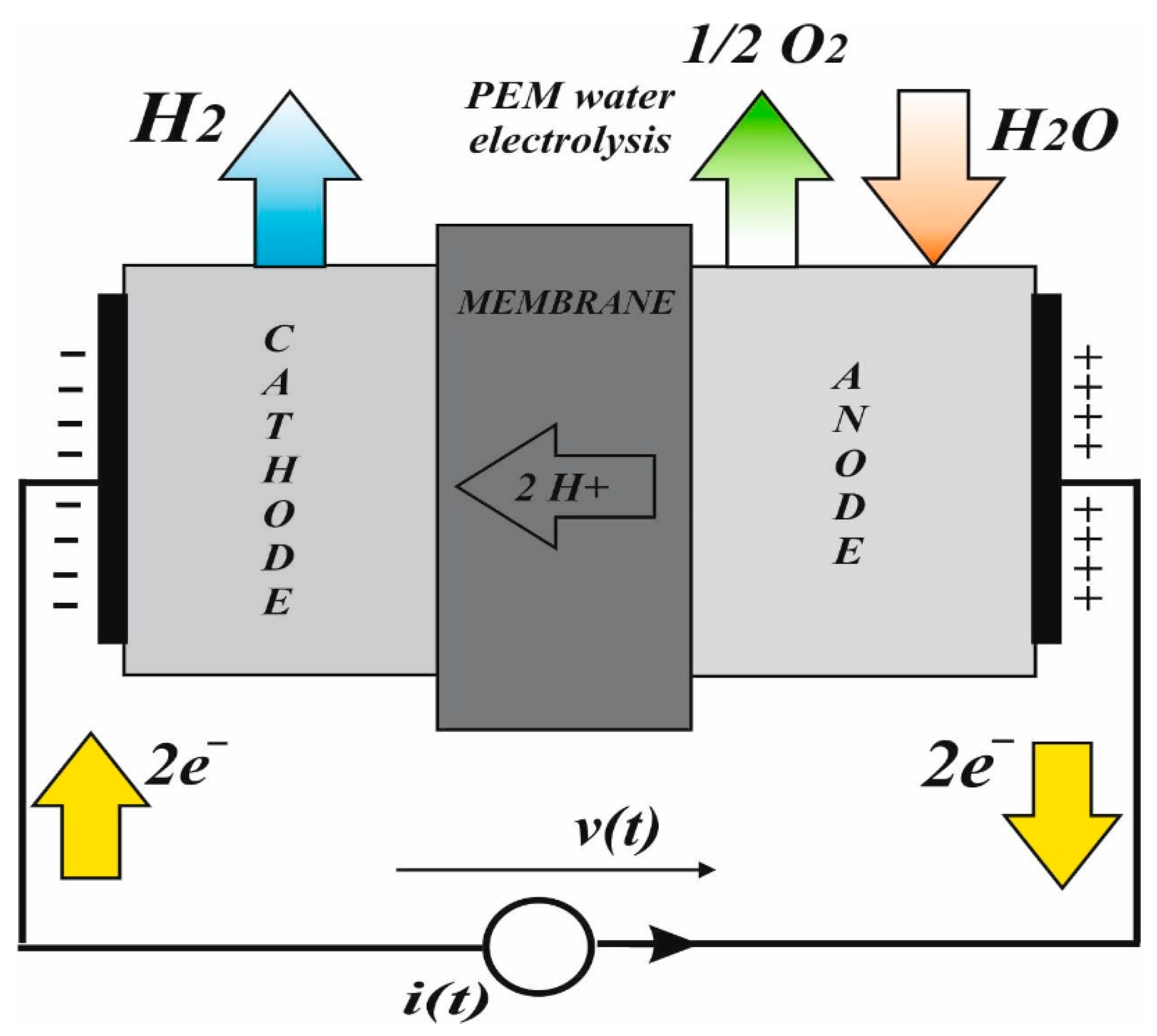
:1. Introduction
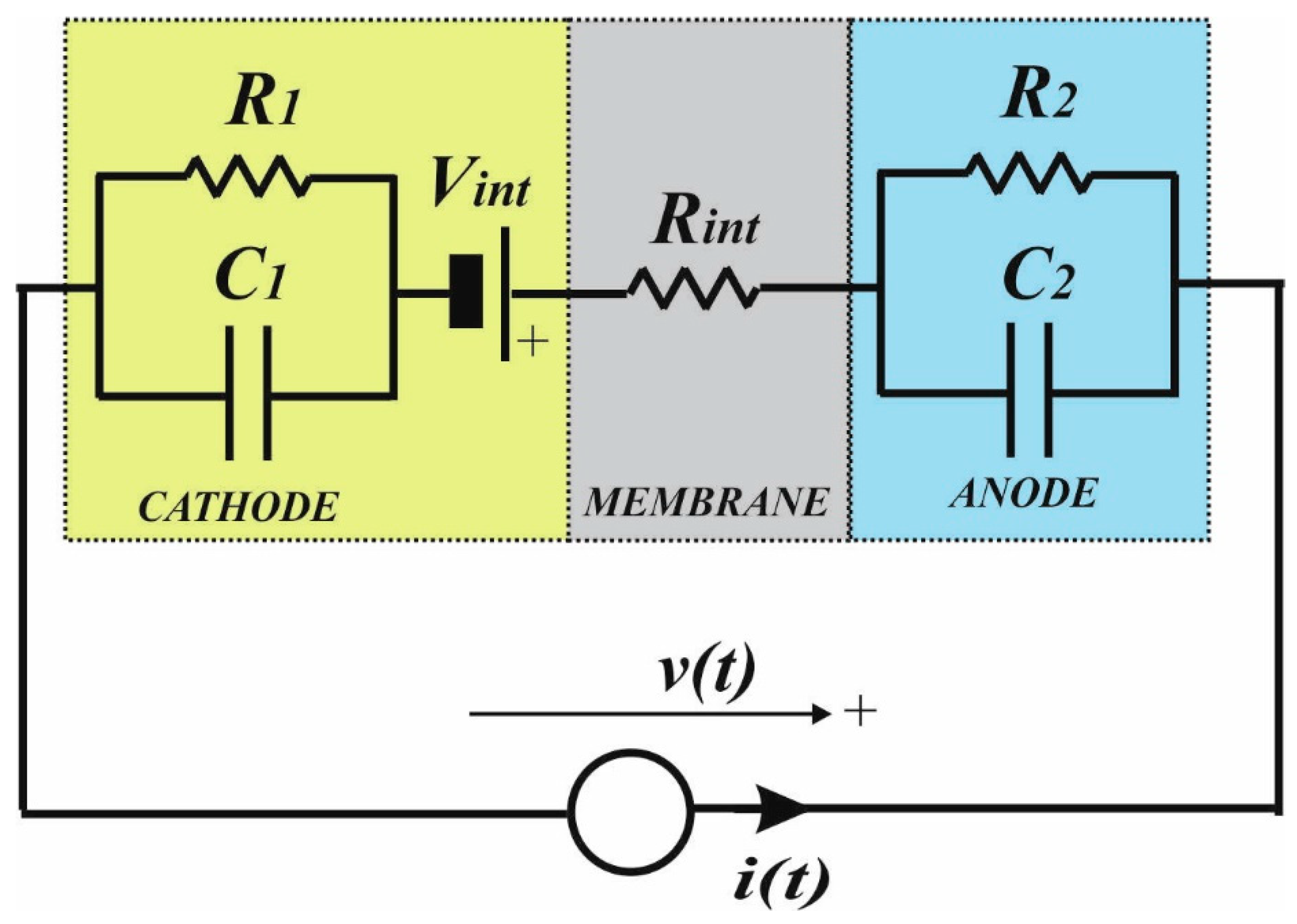
2. Dynamic Circuit Identification
3. Experimental Test Bench and Investigation of the Dynamic Behavior
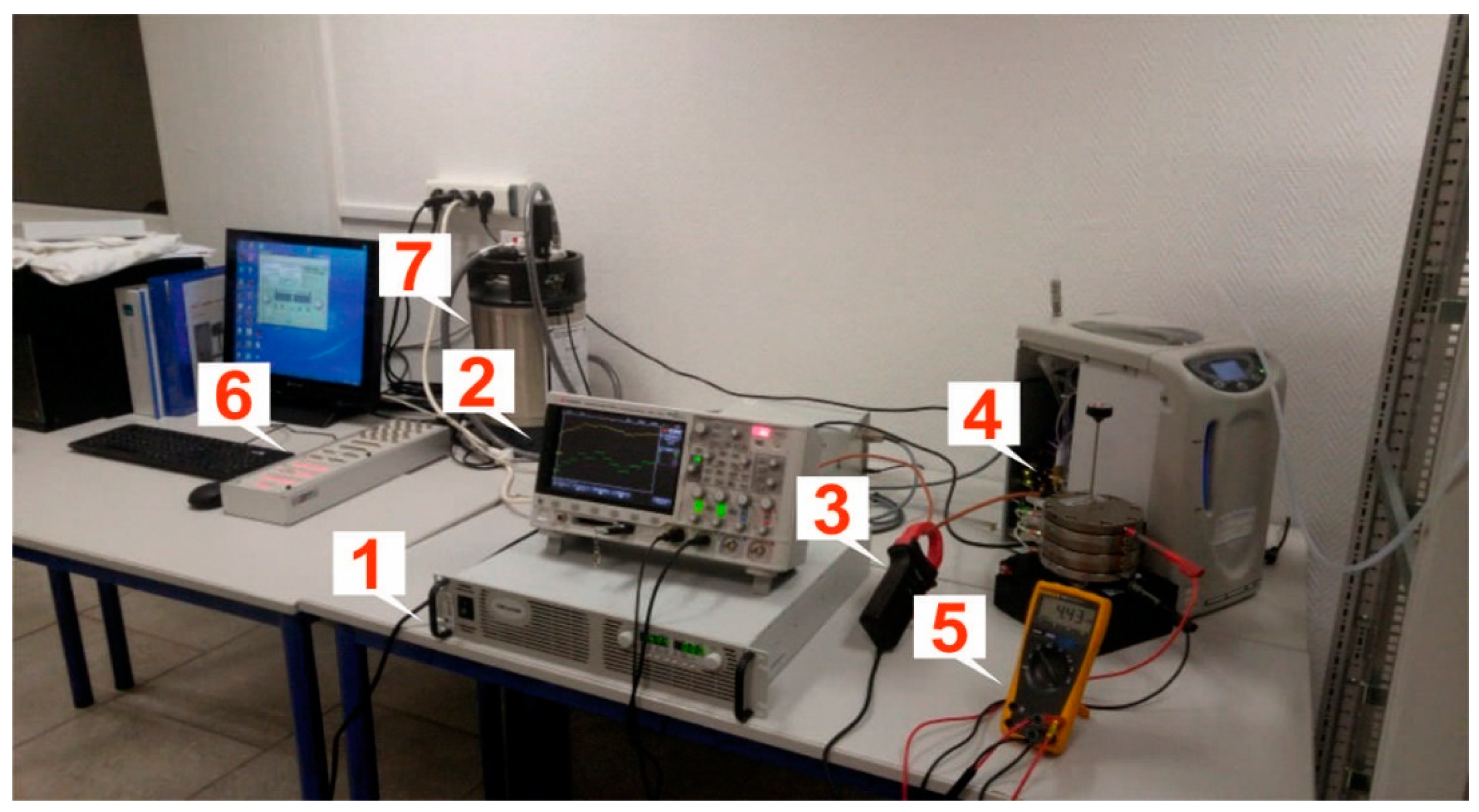
3.1. Description of the Experimental Set-Up
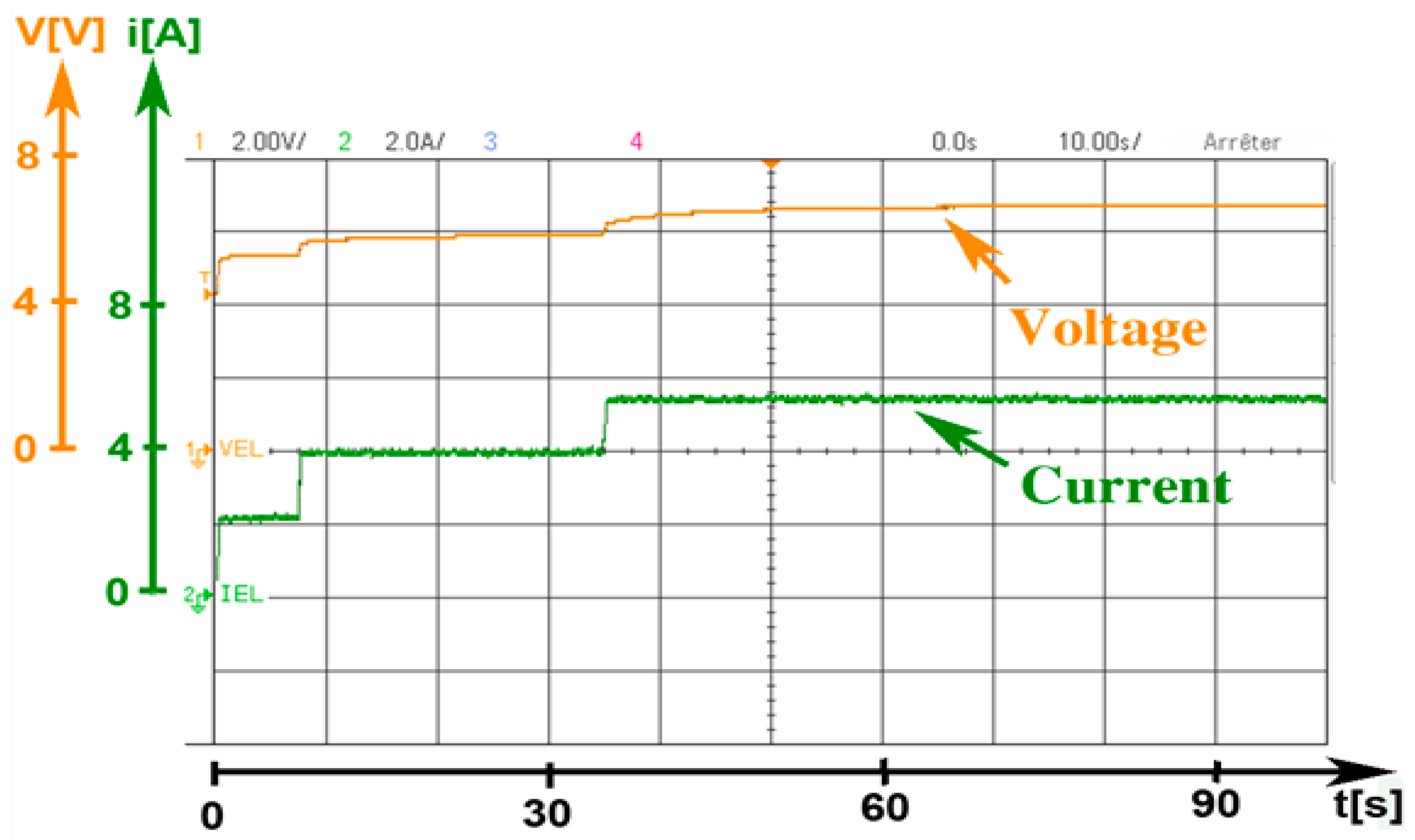
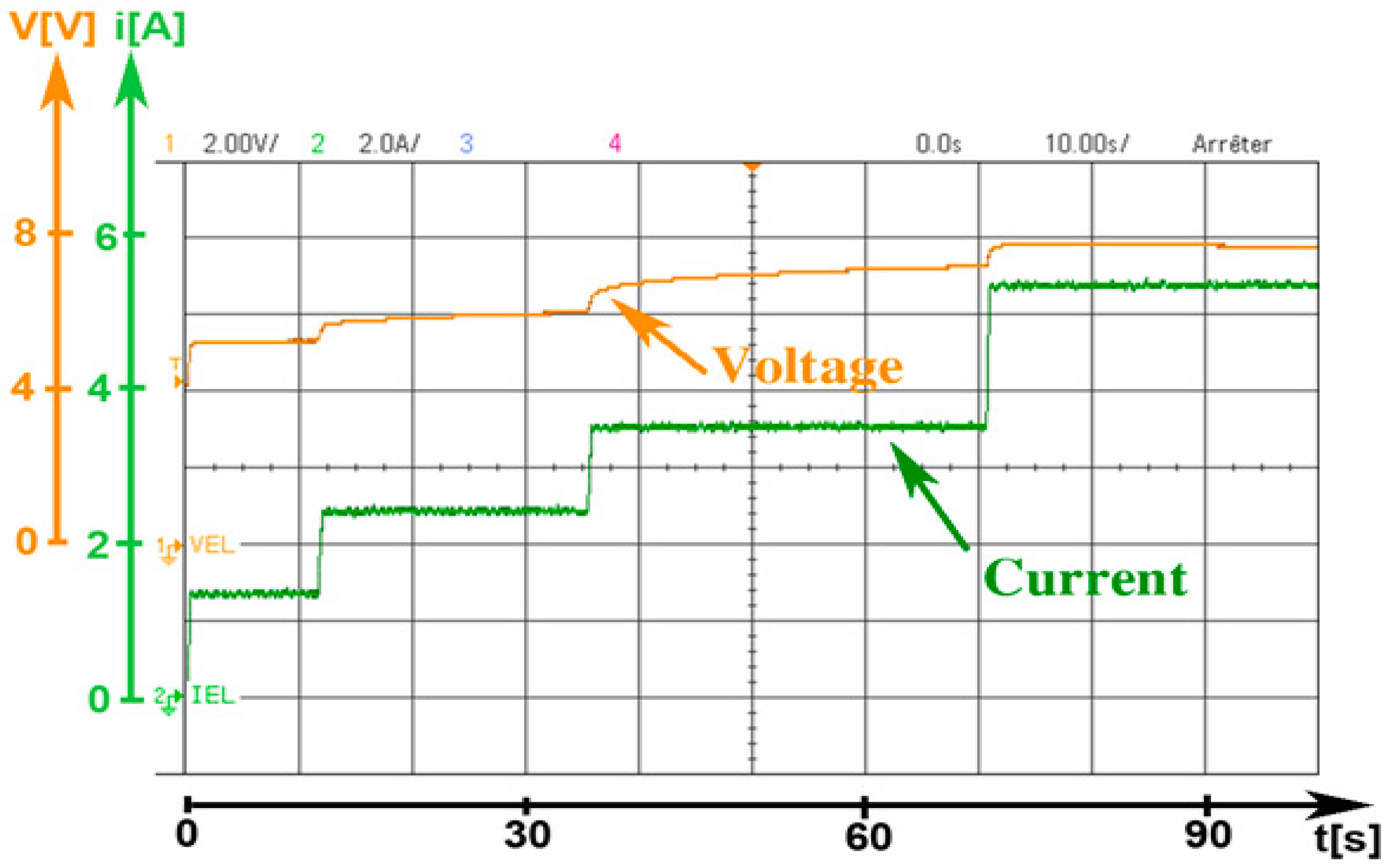
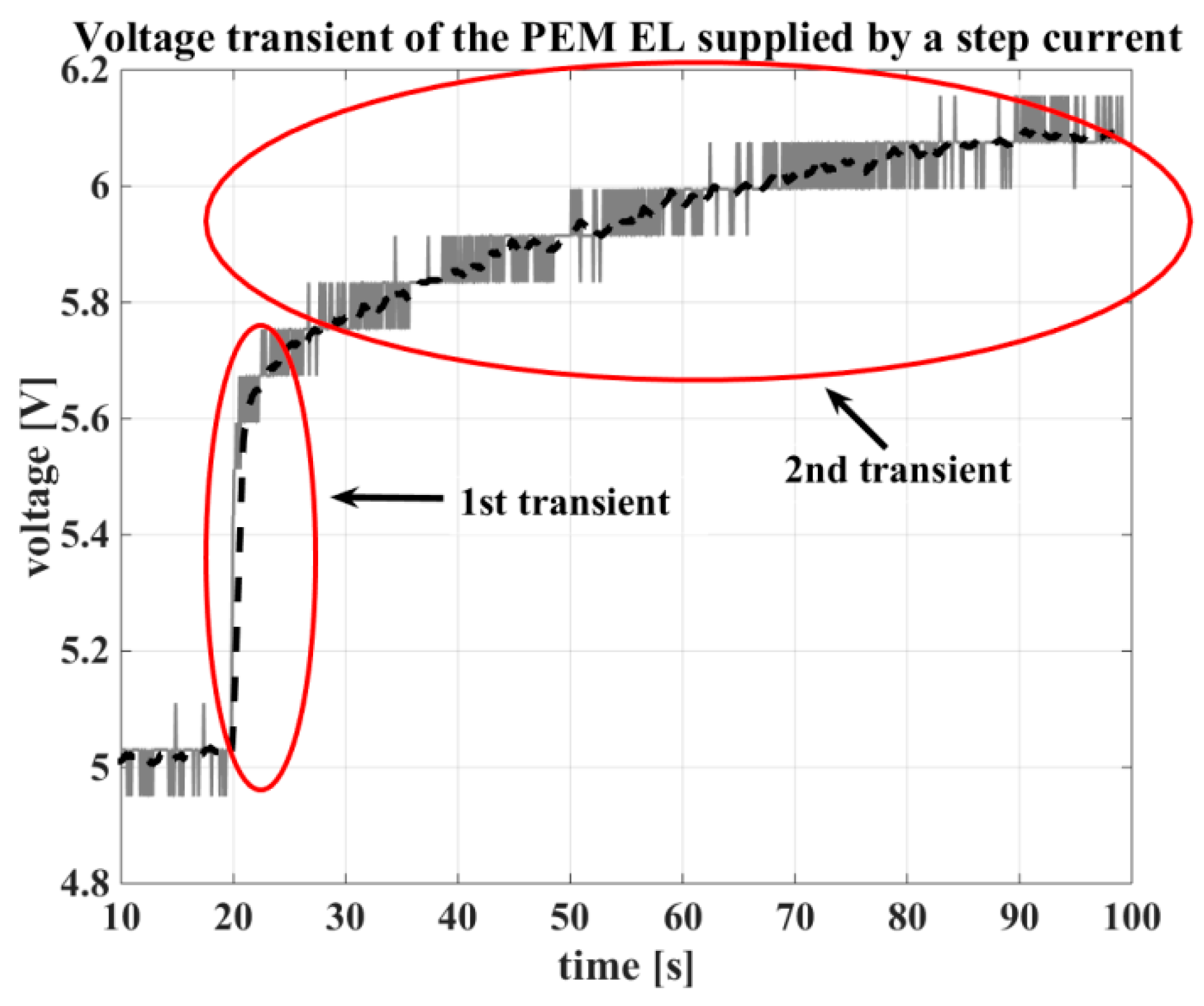
3.2. Analysis of the Dynamic Behavior of the PEM EL
4. PEM Electrolyzer Modelling
4.1. Experimental Test
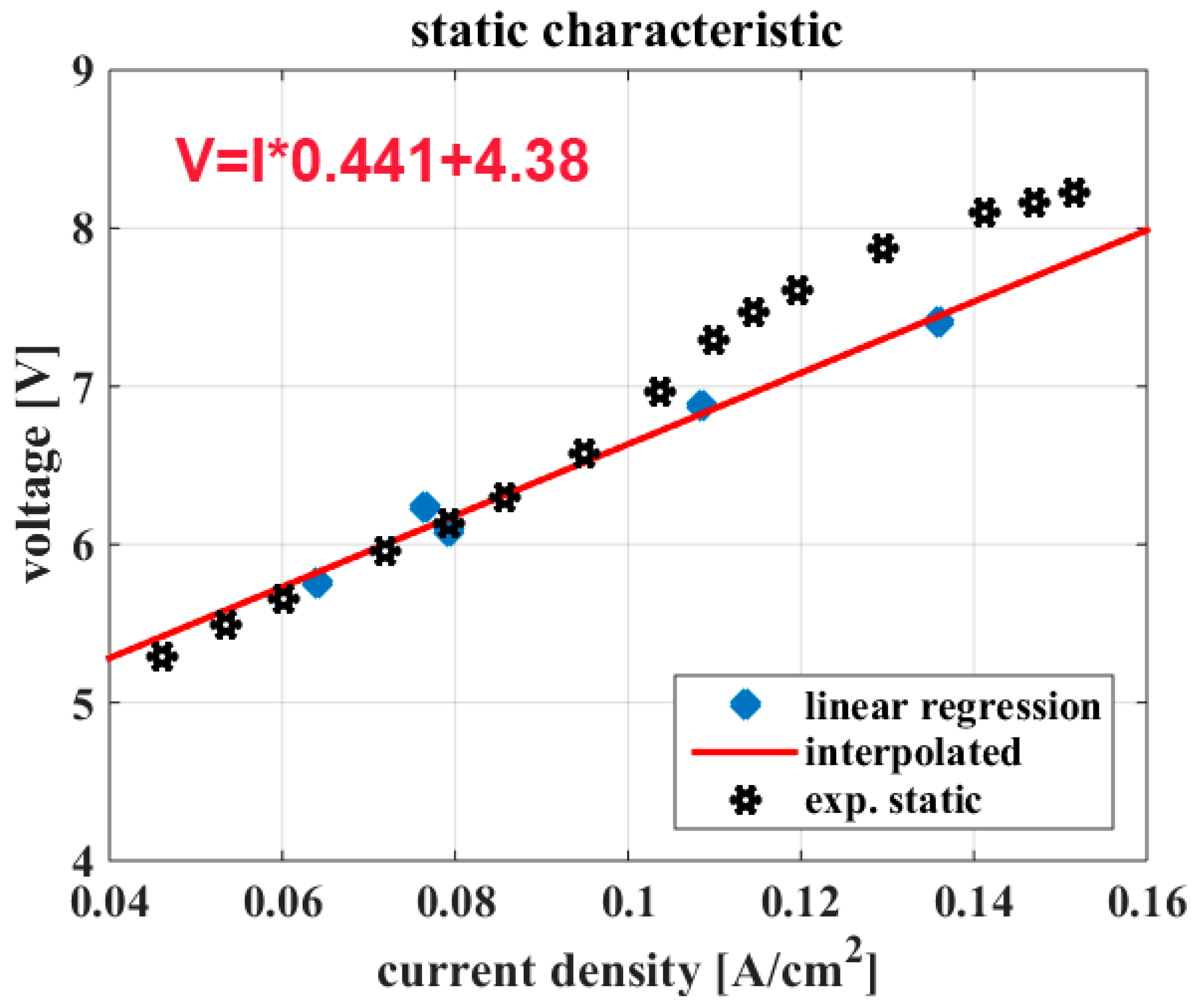
4.2. Static Model Identification
4.3. Dynamic Model Identification
5. Results
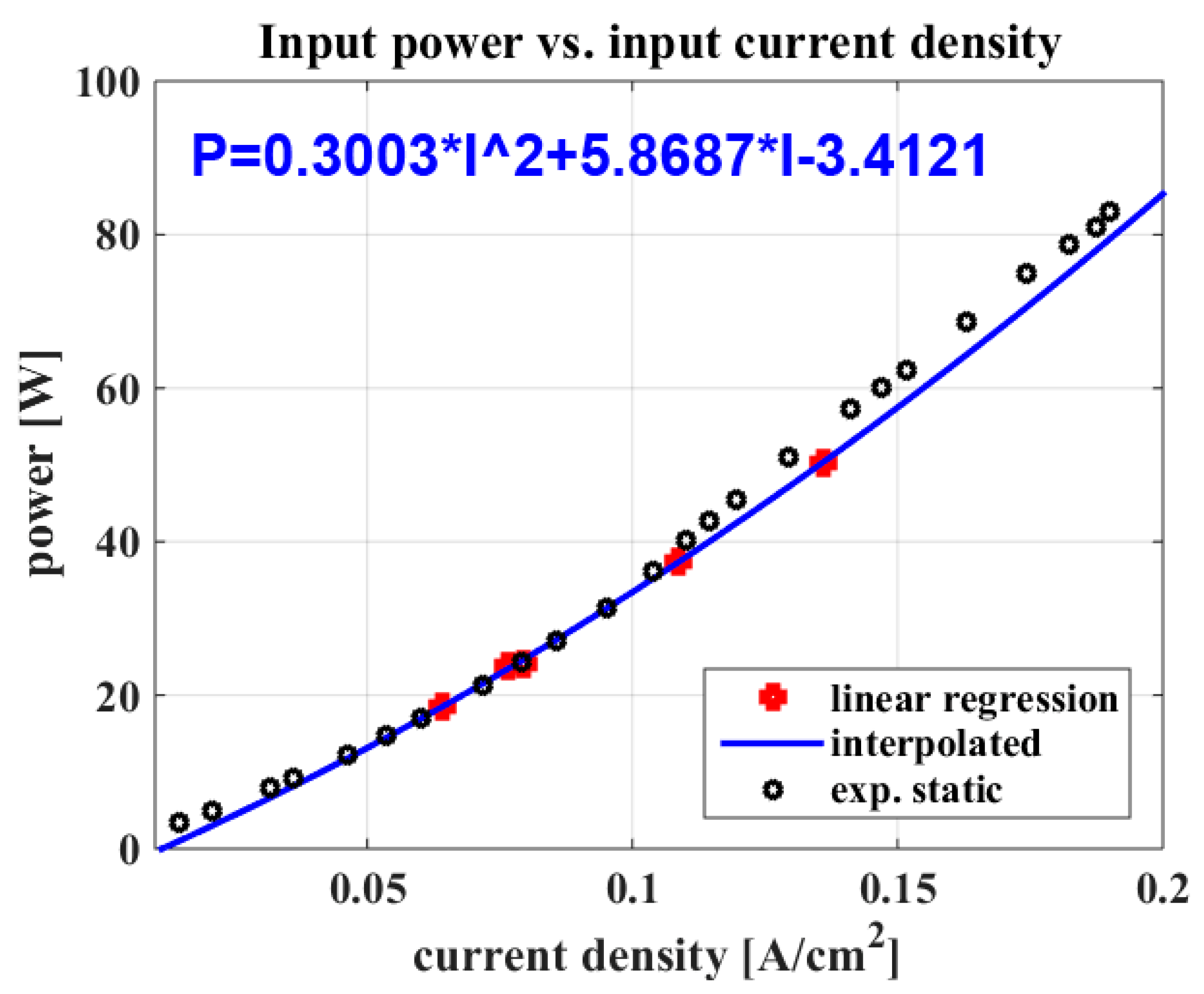
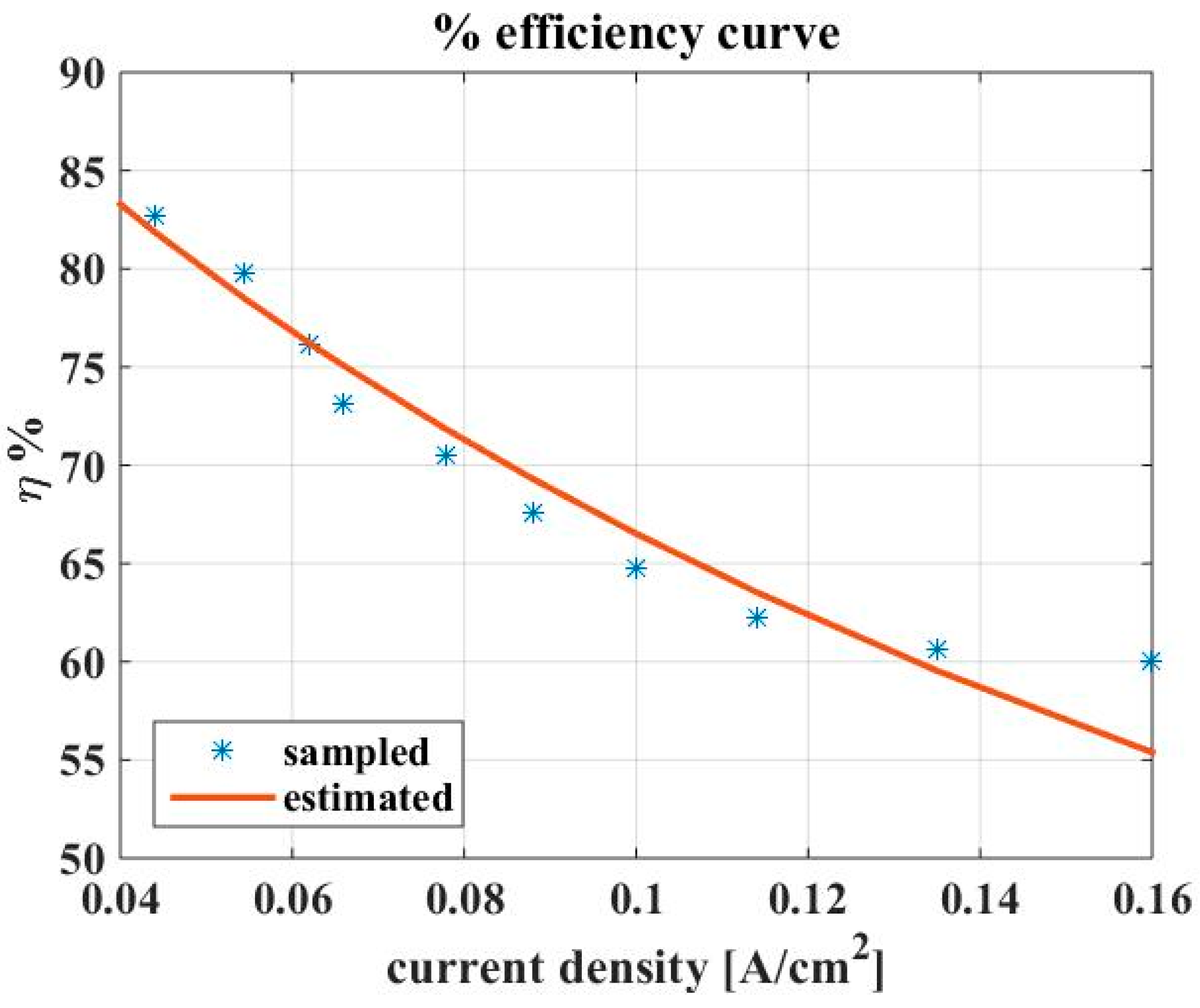
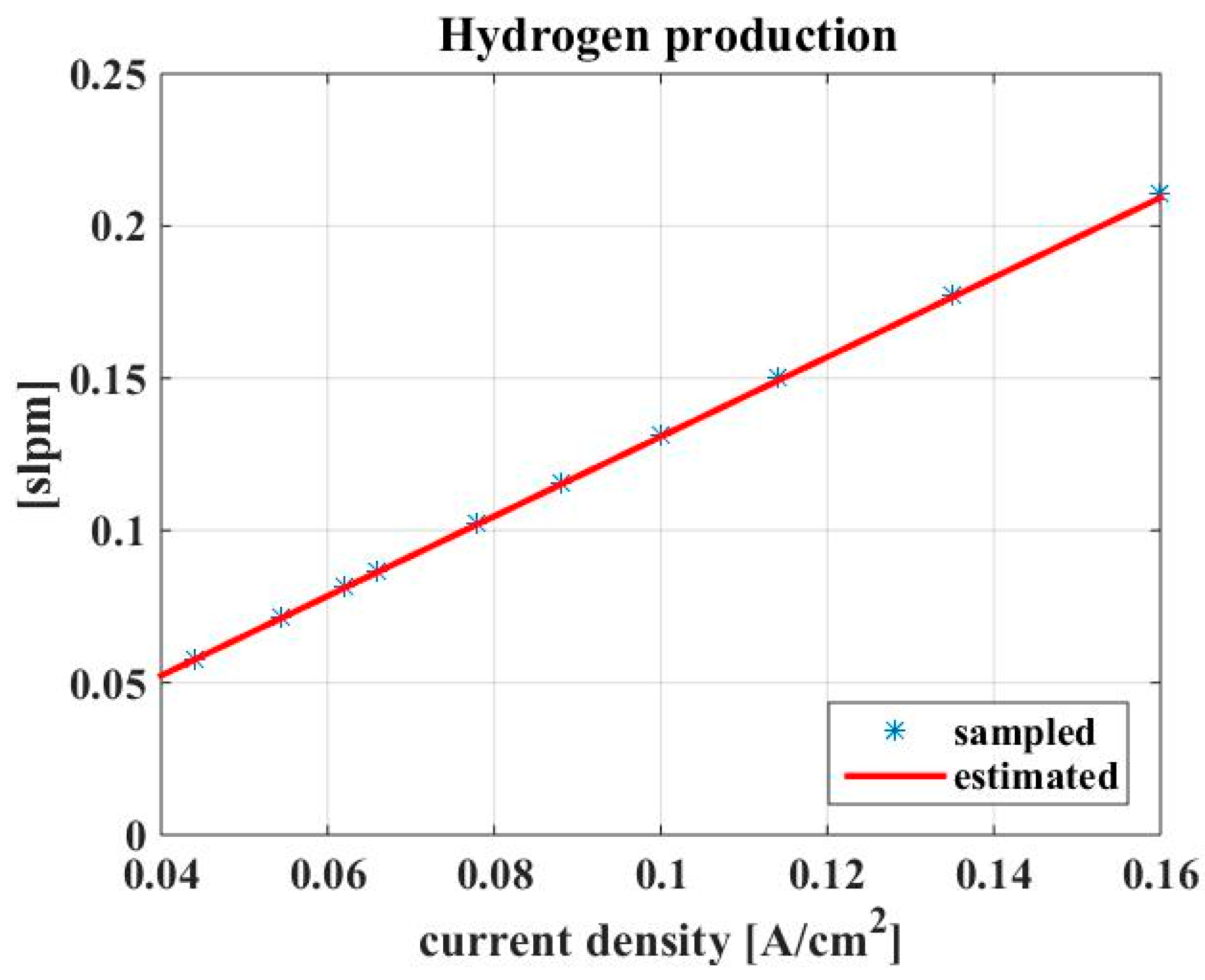
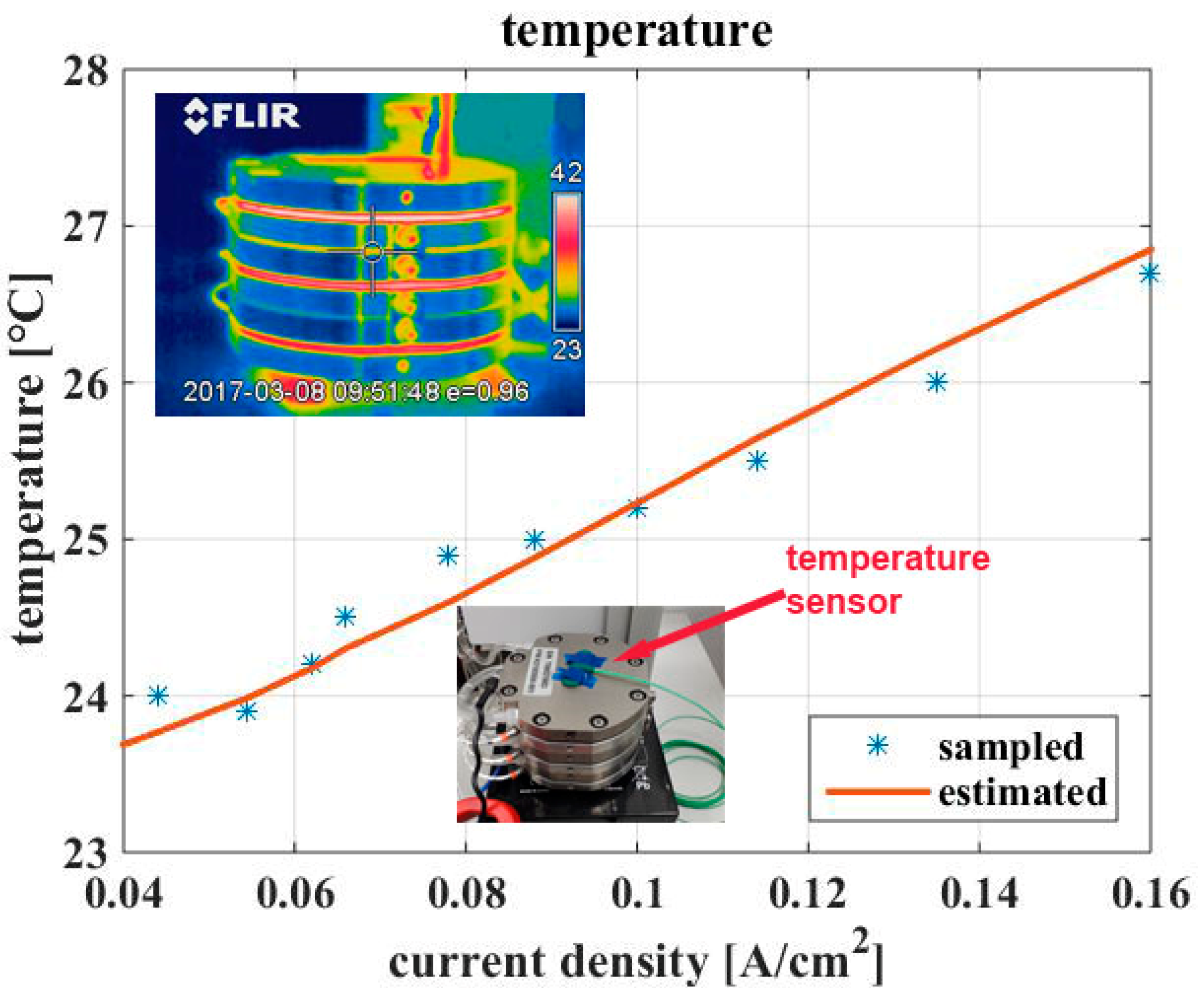
5.1. Static Test
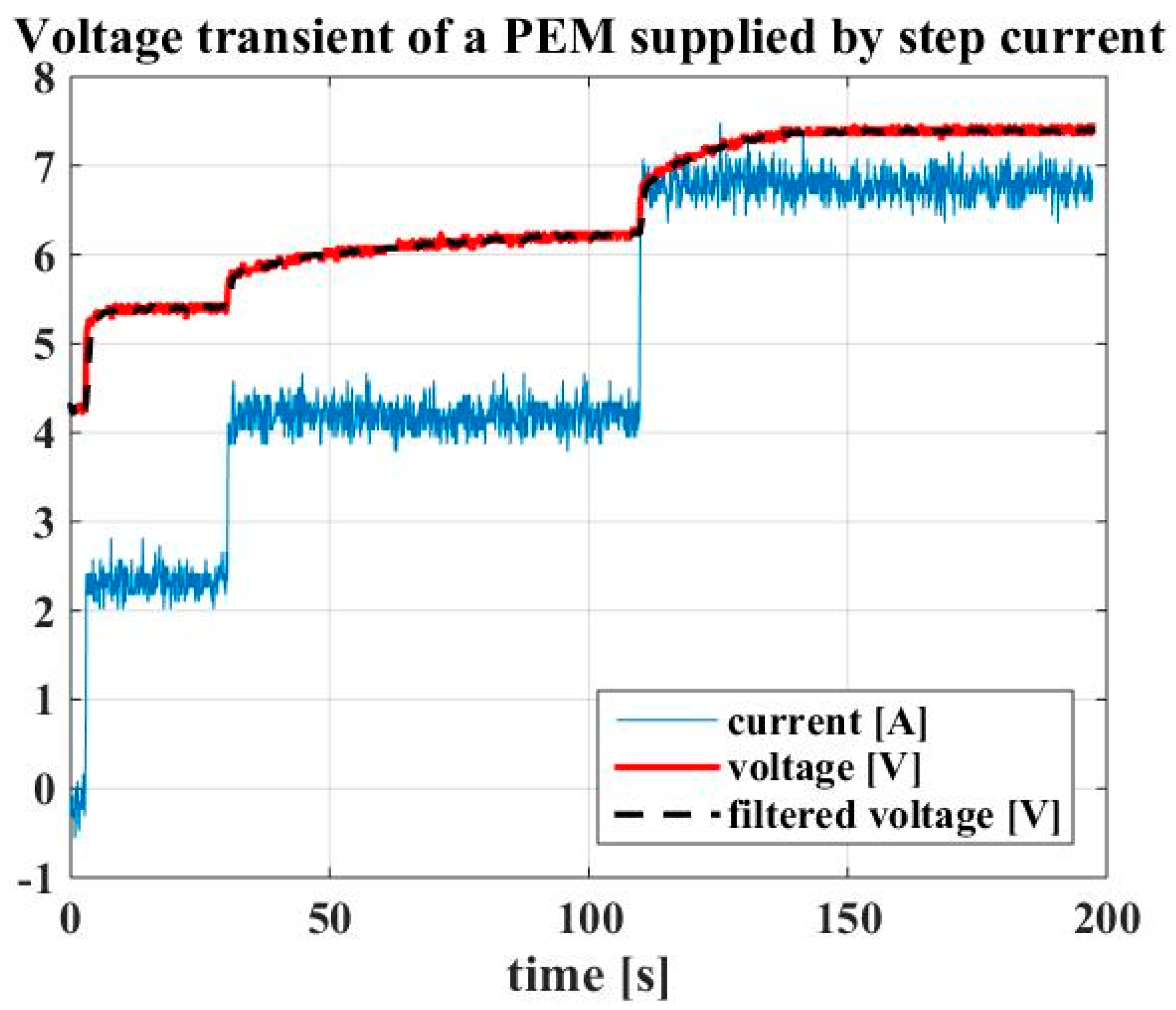
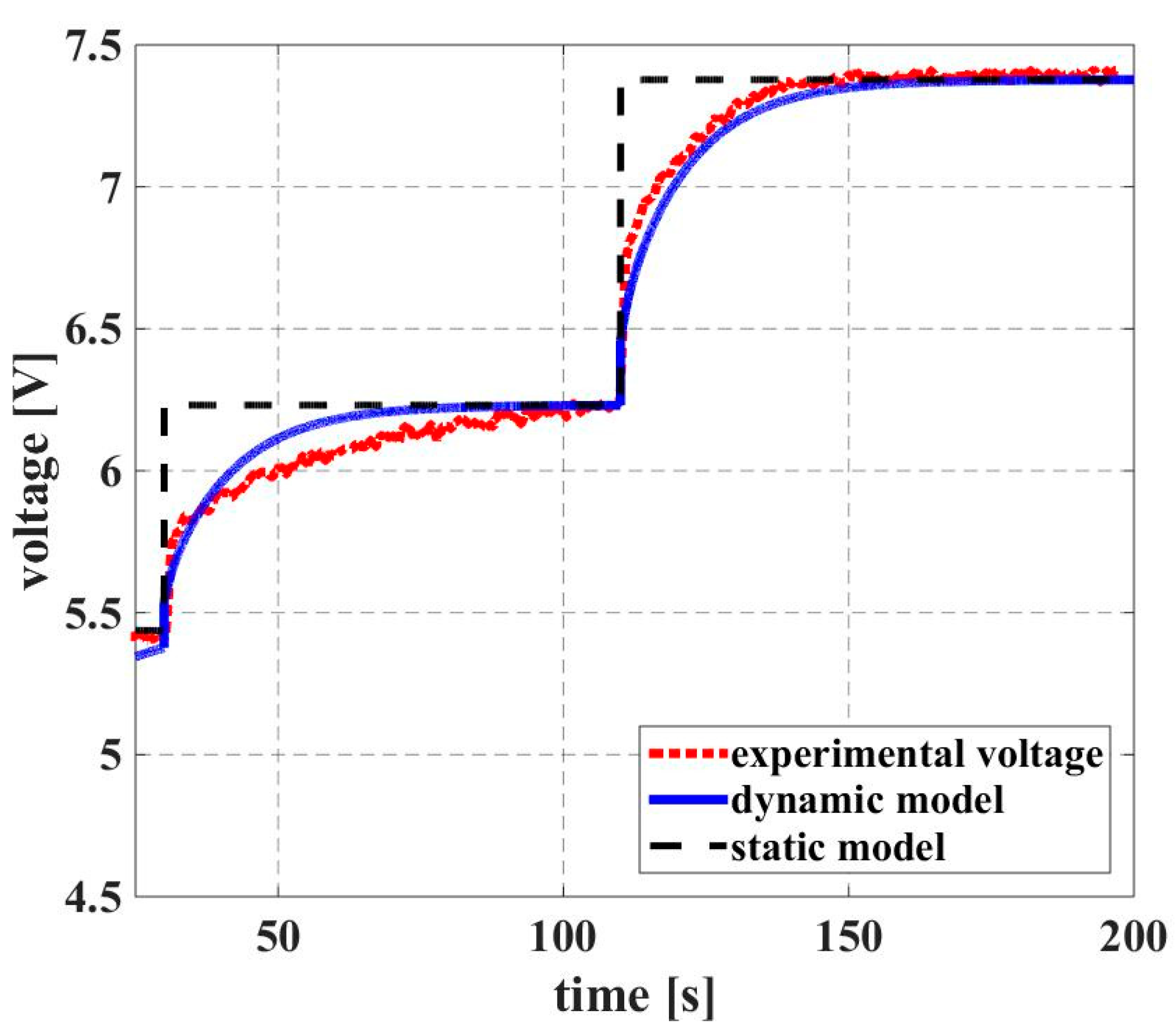
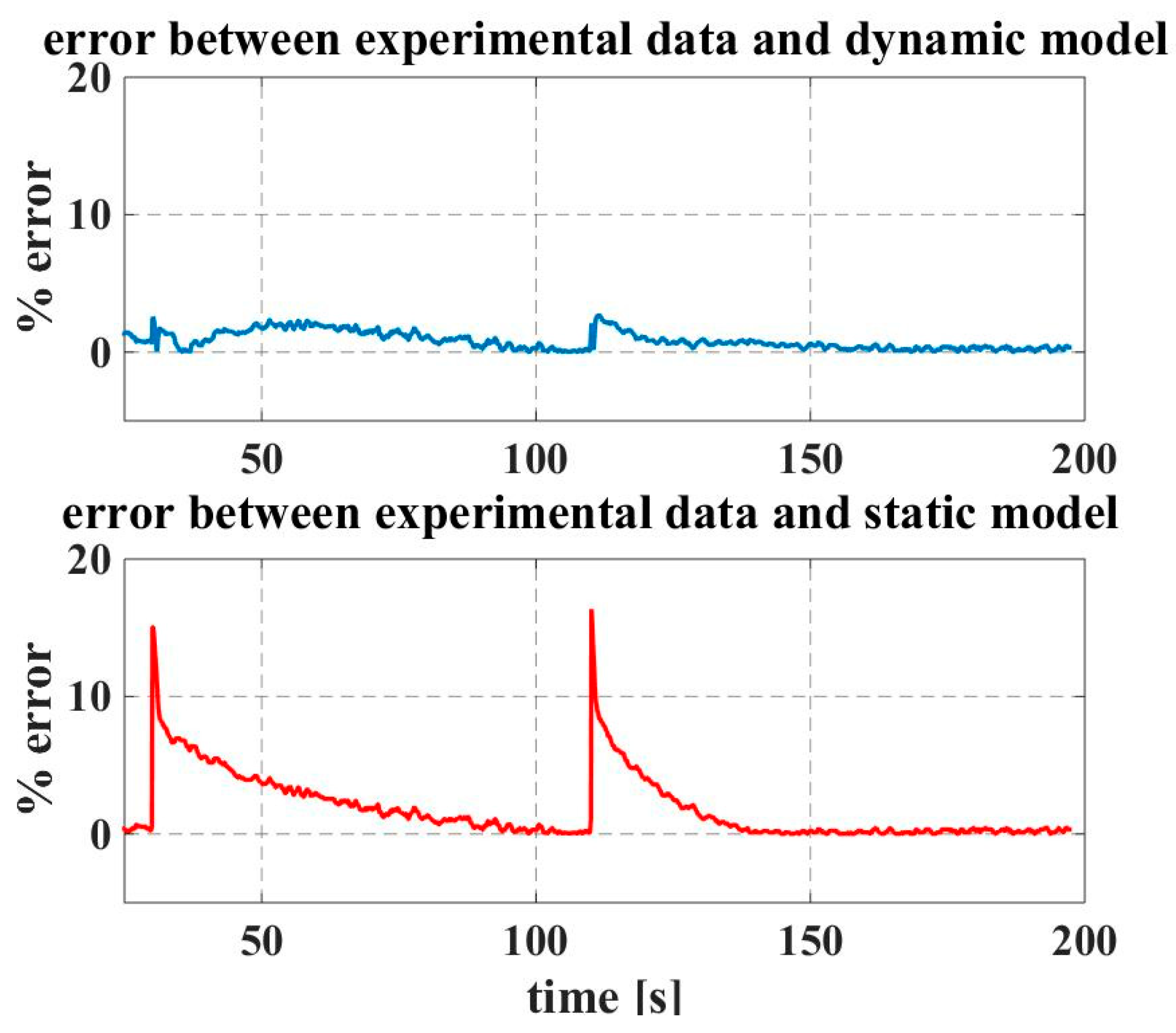
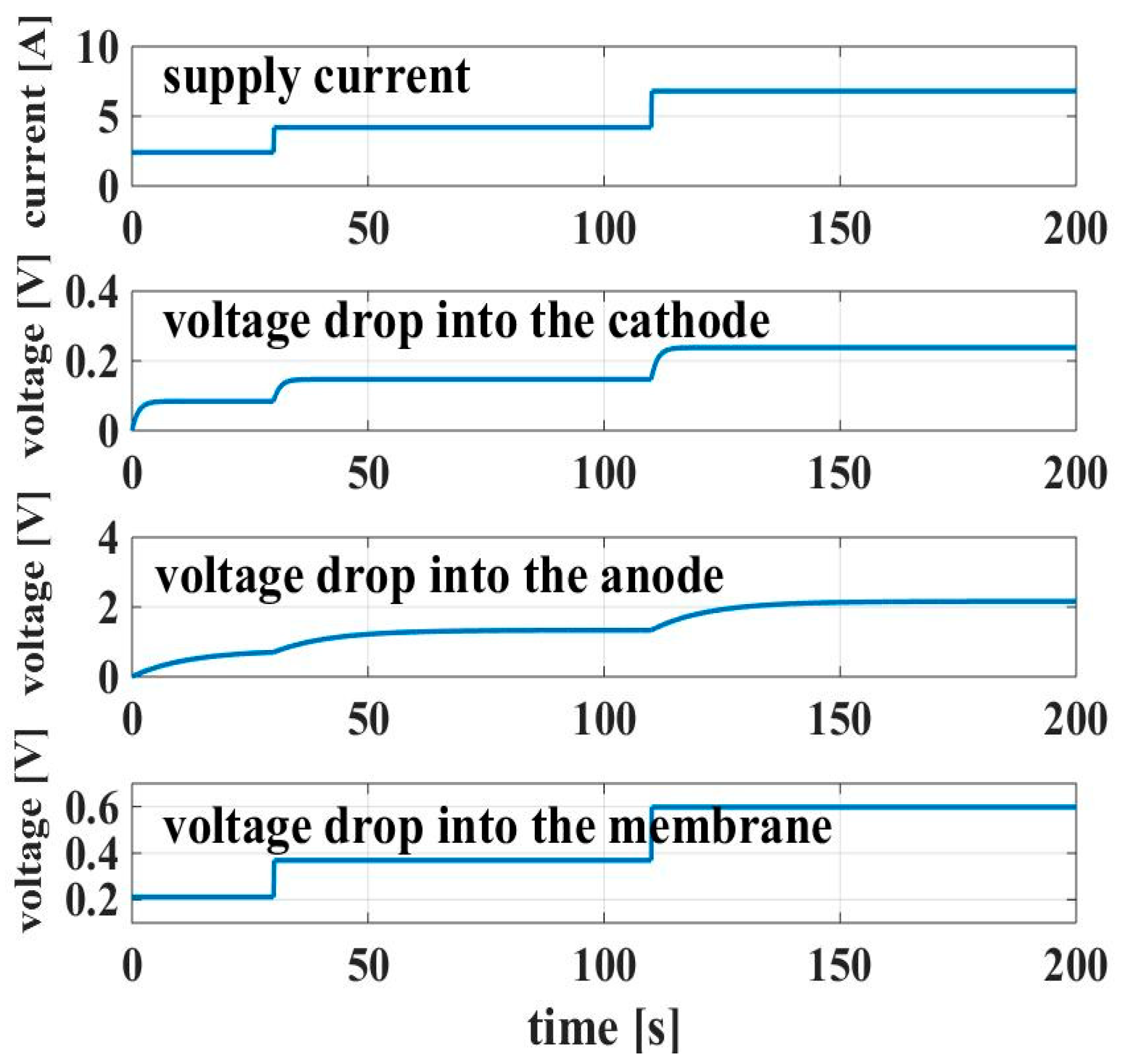
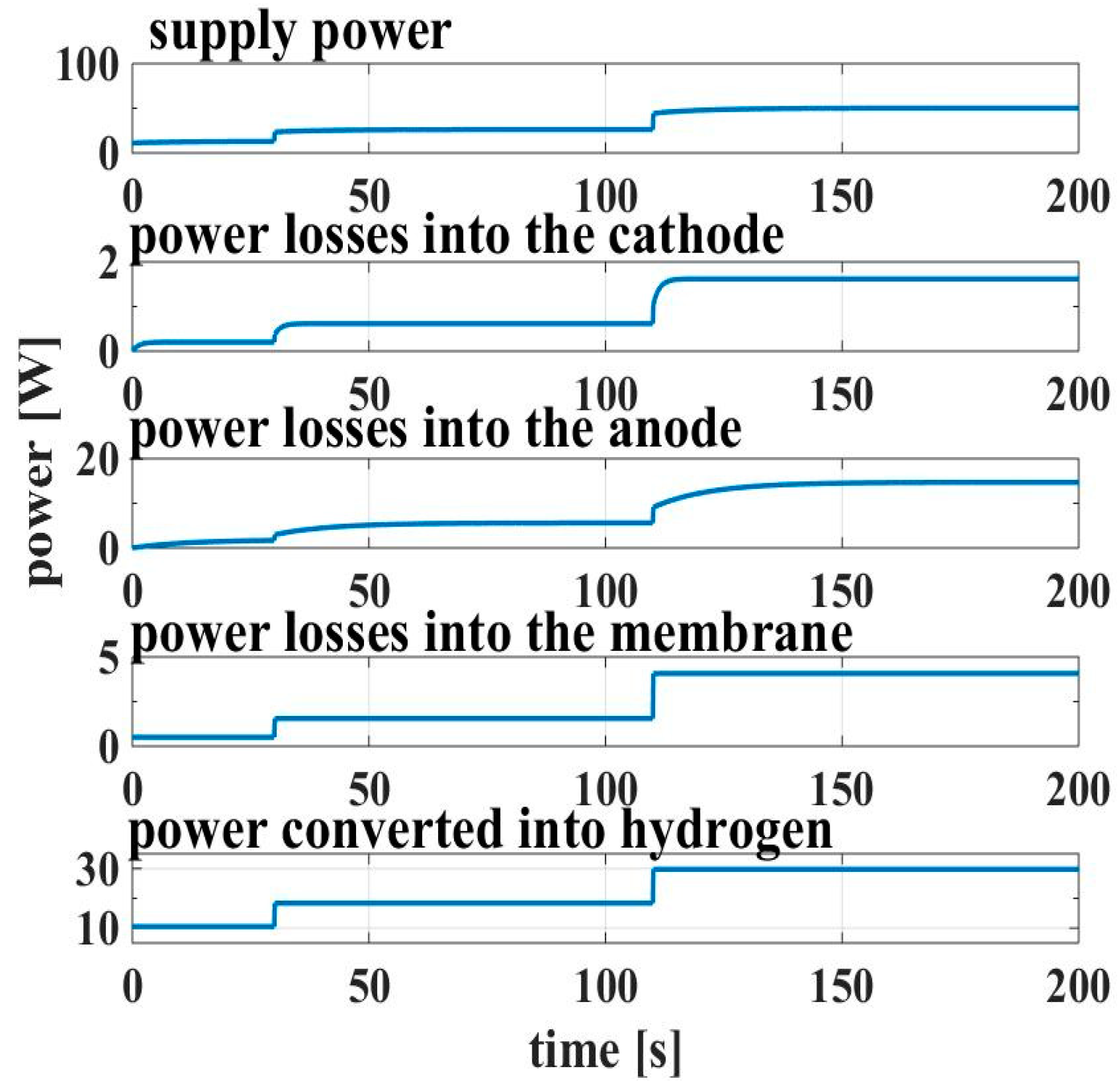
5.2. Dynamic Test
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
References
- Mutarraf, M.U.; Terriche, Y.; Niazi, K.A.K.; Vasquez, J.C.; Guerrero, J.M. Energy Storage Systems for Shipboard Microgrids—A Review. Energies 2018, 11, 3492. [Google Scholar] [CrossRef]
- Mumtaz, S.; Ali, S.; Ahmad, S.; Khan, L.; Hassan, S.Z.; Kamal, T. Energy Management and Control of Plug-In Hybrid Electric Vehicle Charging Stations in a Grid-Connected Hybrid Power System. Energies 2017, 10, 1923. [Google Scholar] [CrossRef]
- Mostert, C.; Ostrander, B.; Bringezu, S.; Kneiske, T.M. Comparing Electrical Energy Storage Technologies Regarding Their Material and Carbon Footprint. Energies 2018, 11, 3386. [Google Scholar] [CrossRef]
- Tanç, B.; Arat, H.T.; Baltacıoğlu, E.; Aydın, k. Overview of the next quarter century vision of hydrogen fuel cell electric vehicles. Int. J. Hydrogen Energy 2018. [Google Scholar] [CrossRef]
- Li, H.; Ravey, A.; N’Diaye, A.; Djerdir, A. A Review of Energy Management Strategy for Fuel Cell Hybrid Electric Vehicle. In Proceedings of the 2017 IEEE Vehicle Power and Propulsion Conference (VPPC), Belfort, France, 11–14 December 2017; pp. 1–6. [Google Scholar]
- Mohanpurkar, M.; Luo, Y.; Terlip, D.; Dias, F.; Harrison, K.; Eichman, J.; Hovsapian, R.; Kurtz, J. Electrolyzers Enhancing Flexibility in Electric Grids. Energies 2017, 10, 1836. [Google Scholar] [CrossRef]
- Carmo, M.; Fritz, D.L.; Mergel, J.; Stolten, D. A comprehensive review on PEM water electrolysis. Int. J. Hydrogen Energy 2013, 38, 4901–4934. [Google Scholar] [CrossRef]
- Koponen, J. Review of Water Electrolysis Technologies and Design of Renewable Hydrogen Production Systems. Master’s Thesis, Lappeen University of Technology, Lappeenranta, Finland, 2015. [Google Scholar]
- Gracia, L.; Casero, P.; Bourasseau, C.; Chabert, A. Use of Hydrogen in Off-Grid Locations, a Techno-Economic Assessment. Energies 2018, 11, 3141. [Google Scholar] [CrossRef]
- Kharel, S.; Shabani, B. Hydrogen as a Long-Term Large-Scale Energy Storage Solution to Support Renewables. Energies 2018, 11, 2825. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, C.Y. Transient analysis of polymer electrolyte fuel cells. Electrochim. Acta 2005, 50, 1307–1315. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, C.Y. Two-phase transients of polymer electrolyte fuel cells. J. Electrochem. Soc. 2007, 154, B636–B643. [Google Scholar] [CrossRef]
- Amphlett, J.C.; de Oliveira, E.H.; Mann, R.F.; Roberge, P.R.; Rodrigues, A.; Salvador, J.P. Dynamic interaction of a proton exchange membrane fuel cell and a lead-acid battery. J. Power Sources 1997, 65, 173–178. [Google Scholar] [CrossRef]
- Hinaje, M.; Raël, S.; Noiying, P.; Nguyen, D.A.; Davat, B. An Equivalent Electrical Circuit Model of Proton Exchange Membrane Fuel Cells Based on Mathematical Modelling. Energies 2012, 5, 2724–2744. [Google Scholar] [CrossRef] [Green Version]
- Ruuskanen, V.; Koponen, J.; Huoman, K.; Kosonen, A.; Niemela, M.; Ahola, J. PEM water electrolyzer model for a power-hardware-in-loop simulator. Int. J. Hydrogen Energy 2017, 42, 10775–10784. [Google Scholar] [CrossRef]
- Sarrias-Mena, R.; Fernandez-Ramirez, L.M.; Garcia-Vasquez, C.A.; Jurado, F. Electrolyzer models for hydrogen production from wind energy systems. Int. J. Hydrogen Energy 2015, 40, 2927–2938. [Google Scholar] [CrossRef]
- Awasthi, A.; Scott, K.; Basu, S. Electrolyzer models for hydrogen production from wind energy systems. Int. J. Hydrogen Energy 2011, 36, 14779–14786. [Google Scholar] [CrossRef]
- Han, B.; Steen III, S.M.; Mo, J.; Zhang, F.Y. Electrochemical performance modeling of a proton exchange membrane electrolyzer cell for hydrogen energy. Int. J. Hydrogen Energy 2015, 40, 7006–7016. [Google Scholar] [CrossRef] [Green Version]
- Han, B.; Steen, S.M., III; Mo, J.; Zhang, F.Y. Modelling and simulation of a proton exchange membrane (PEM) electrolyser cell. Int. J. Hydrogen Energy 2015, 40, 13243–13257. [Google Scholar] [CrossRef]
- Abdol Rahim, A.H.; Tijani, A.S.; Kamarudin, S.K.; Hanapi, S. An overview of polymer electrolyte membrane electrolyzer for hydrogen production: Modeling and mass transport. J. Power Sources 2016, 309, 56–65. [Google Scholar] [CrossRef]
- Espinosa-Lopez, M.; Darras, C.; Poggi, P.; Glises, R.; Baucour, P.; Rakotondrainibe, A.; Besse, S.; Serre-Combe, P. Modelling and experimental validation of a 46 kW PEM high pressure water electrolyzer. Renew. Energy 2018, 119, 160–173. [Google Scholar] [CrossRef]
- Yigit, T.; Faruk Selamet, O. Mathematical modeling and dynamic simulink simulation of high-pressure PEM electrolyzer system. Int. J. Hydrogen Energy 2016, 41, 13901–13914. [Google Scholar] [CrossRef]
- Aouali, F.Z.; Becherif, M.; Ramadan, H.S.; Emziane, M.; Khellaf, A.; Mohammedi, K. Analytical modelling and experimental validation of proton exchange membrane electrolyser for hydrogen production. Int. J. Hydrogen Energy 2017, 42, 1366–1374. [Google Scholar] [CrossRef]
- Atlam, O.; Kolhe, M. Equivalent electrical model for a proton exchange membrane (PEM) electrolyser. Energy Convers. Manag. 2011, 52, 2952–2957. [Google Scholar] [CrossRef]
- Andonov, A.; Antonov, L. Modeling of an electrolyzer for а hybrid power supply system. Sci. Eng. Educ. 2016, 1, 36–38. [Google Scholar]
- Belmokhtar, K.; Doumbia, M.L.; Agbossou, K. Dynamic Model of an Alkaline Electrolyzer Based an Artificial Neural Networks. In Proceedings of the Eighth International Conference and Exhibition on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 27–30 March 2013; pp. 1–4. [Google Scholar]
- Liso, V.; Savoia, G.; Araya, S.S.; Cinti, G.; Kær, S.K. Modelling and Experimental Analysis of a Polymer Electrolyte Membrane Water Electrolysis Cell at Different Operating Temperatures. Energies 2018, 11, 3273. [Google Scholar] [CrossRef]
- Sánchez, M.; Amores, E.; Rodríguez, L.; Clemente-Jul, C. Semi-empirical model and experimental validation for the performance evaluation of a 15 kW alkaline water electrolyzer. Int. J. Hydrogen Energy 2018, 43, 20332–20345. [Google Scholar] [CrossRef]
- Corengia, M.; Torres, A.I. Two-phase Dynamic Model for PEM Electrolyzer. Comput. Aided Chem. Eng. 2018, 44, 1435–1440. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Unit |
|---|---|---|
| Rated electrical power | 400 | W |
| Stack operating voltage range | 7.5–8 | V |
| Stack current range | 0–50 | A |
| Delivery output pressure | 0.1–10.5 | bar |
| Cells number | 3 | - |
| Active area Section | 50 | cm2 |
| Component | Producer | Model |
|---|---|---|
| DC Power Supply | TDK | GEN60-55 |
| Pure water tank | SGWATER | SG 2000 |
| Digital Oscilloscope | Tektronix | MDO3054 |
| Current clamp | Chauvin Arnoux | PAC10 |
| PEM EL | HELIOCENTRIS | NMH2 1000 |
| Digital multimeter | Fluke | 179 |
| dSPACE board | dSPACE | DS1104 |
| Hydrogen tank | HELIOCENTRIS | 760 NI |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guilbert, D.; Vitale, G. Dynamic Emulation of a PEM Electrolyzer by Time Constant Based Exponential Model. Energies 2019, 12, 750. https://doi.org/10.3390/en12040750
Guilbert D, Vitale G. Dynamic Emulation of a PEM Electrolyzer by Time Constant Based Exponential Model. Energies. 2019; 12(4):750. https://doi.org/10.3390/en12040750
Chicago/Turabian StyleGuilbert, Damien, and Gianpaolo Vitale. 2019. "Dynamic Emulation of a PEM Electrolyzer by Time Constant Based Exponential Model" Energies 12, no. 4: 750. https://doi.org/10.3390/en12040750
APA StyleGuilbert, D., & Vitale, G. (2019). Dynamic Emulation of a PEM Electrolyzer by Time Constant Based Exponential Model. Energies, 12(4), 750. https://doi.org/10.3390/en12040750