Two-Terminal Algorithm Analysis for Unsymmetrical Fault Location on 110 kV Lines


Abstract
:1. Introduction
- Travelling wave-based methods,
- Artificial intelligence-based methods,
- Impedance-based methods.
1.1. Travelling Wave- and Artificial Intelligence-Based Methods
- Expert System Techniques,
- Artificial Neural Networks,
- Fuzzy Logic Systems.
1.2. Impedance-Based Methods
- Elimination of fault location errors caused by inaccuracies in residual compensation factors determination,
- Suppression of an error caused by the fault resistance,
- Reduction of the effects of mutual coupling and line asymmetry.
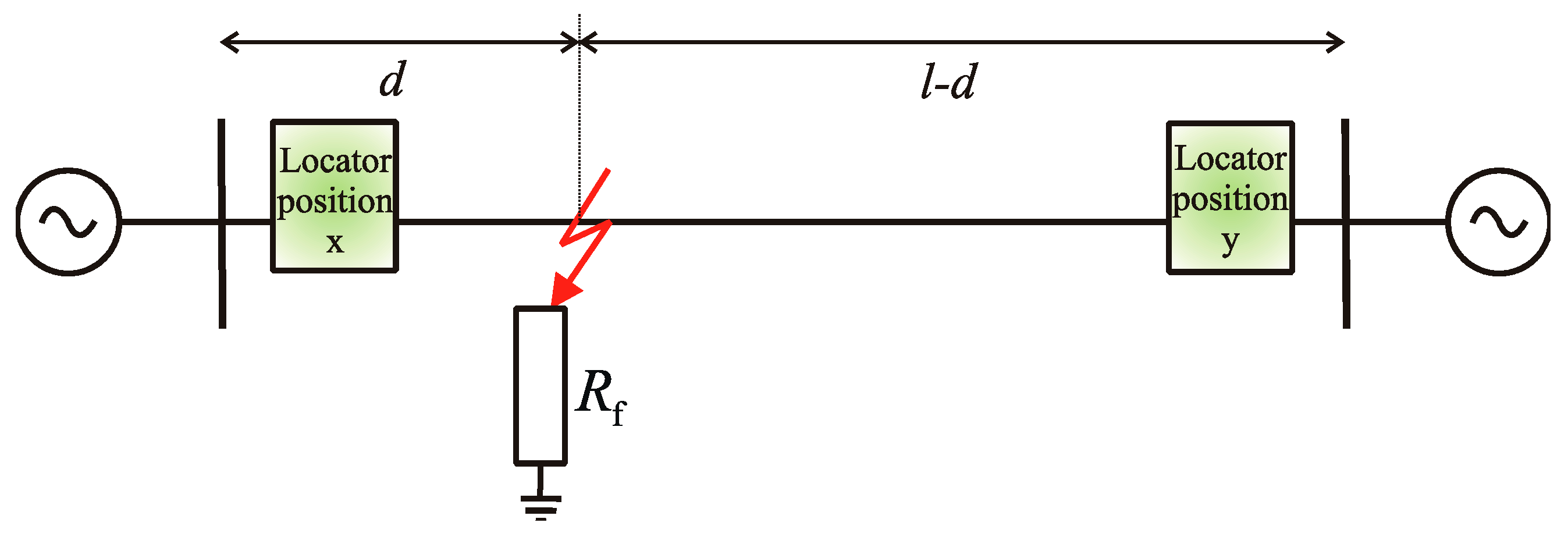
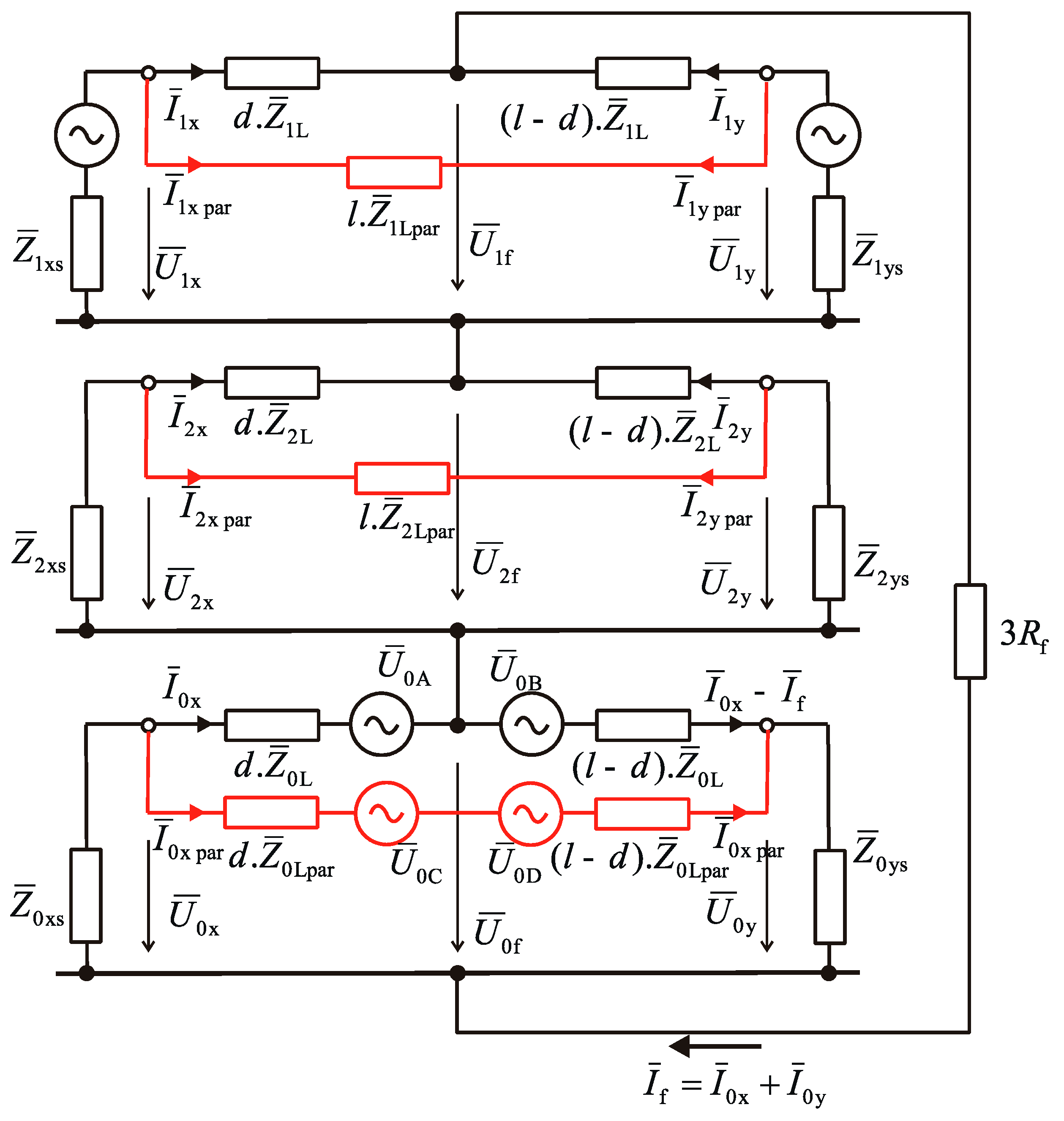
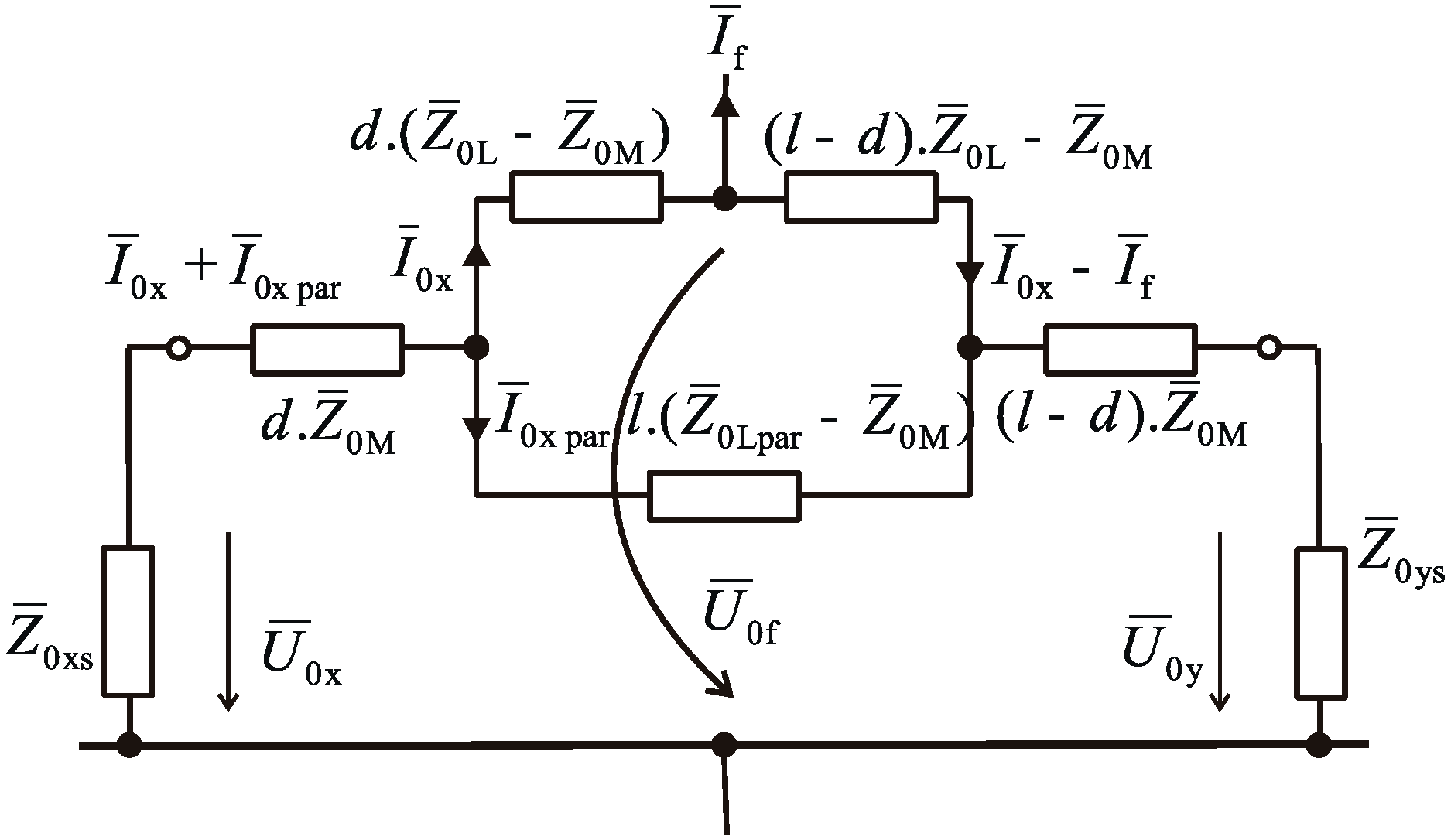
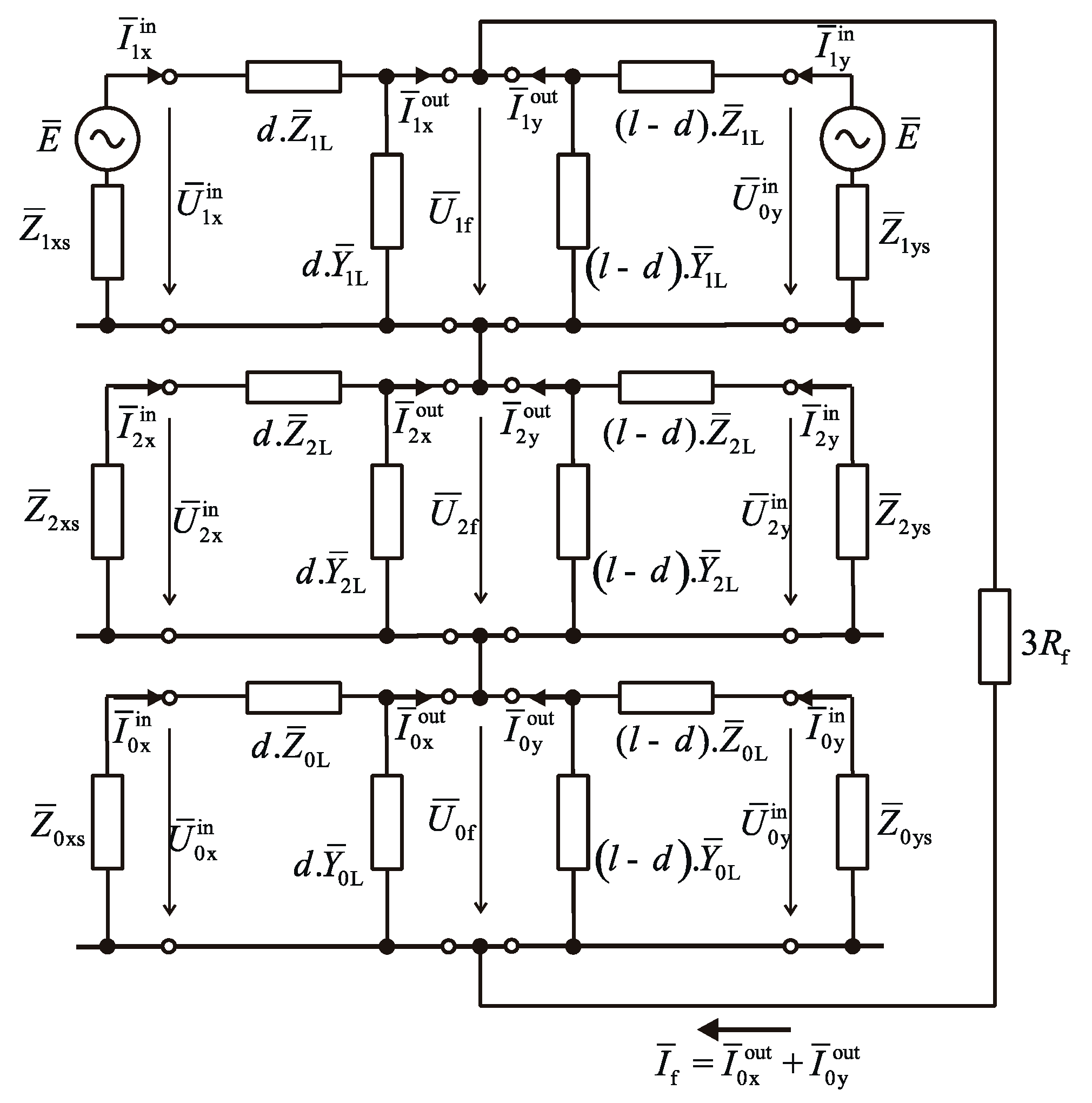
2. Description of the Analyzed Algorithm
2.1. Basic Description of the One-Terminal Algorithm
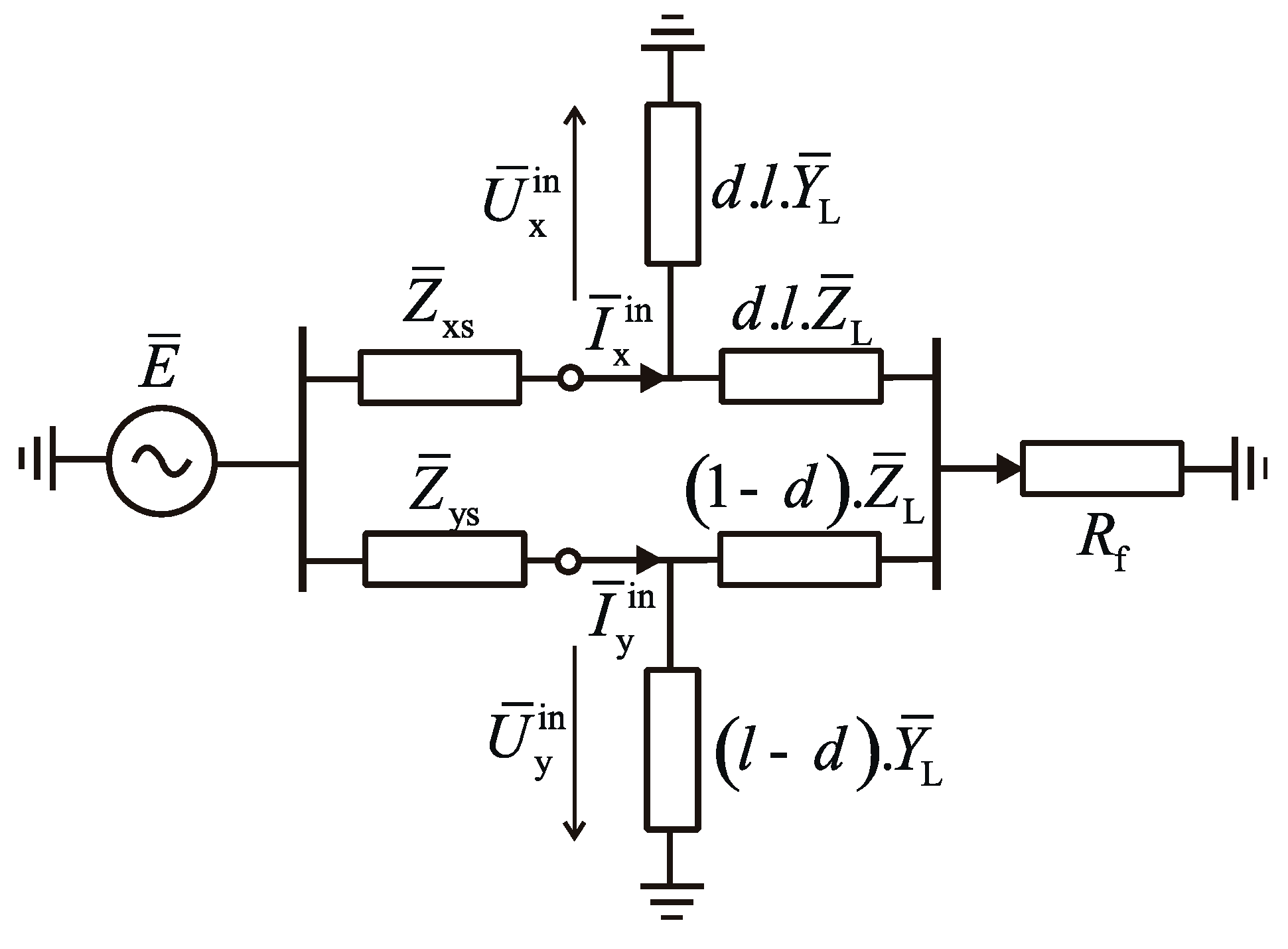
2.2. Two-Terminal Algorithm
2.3. Synchronization
- Phasor correction at the x-point: , ,
- Phasor correction at the y-point: , ,
3. Analysis of the Two-Terminal Algorithm Testing
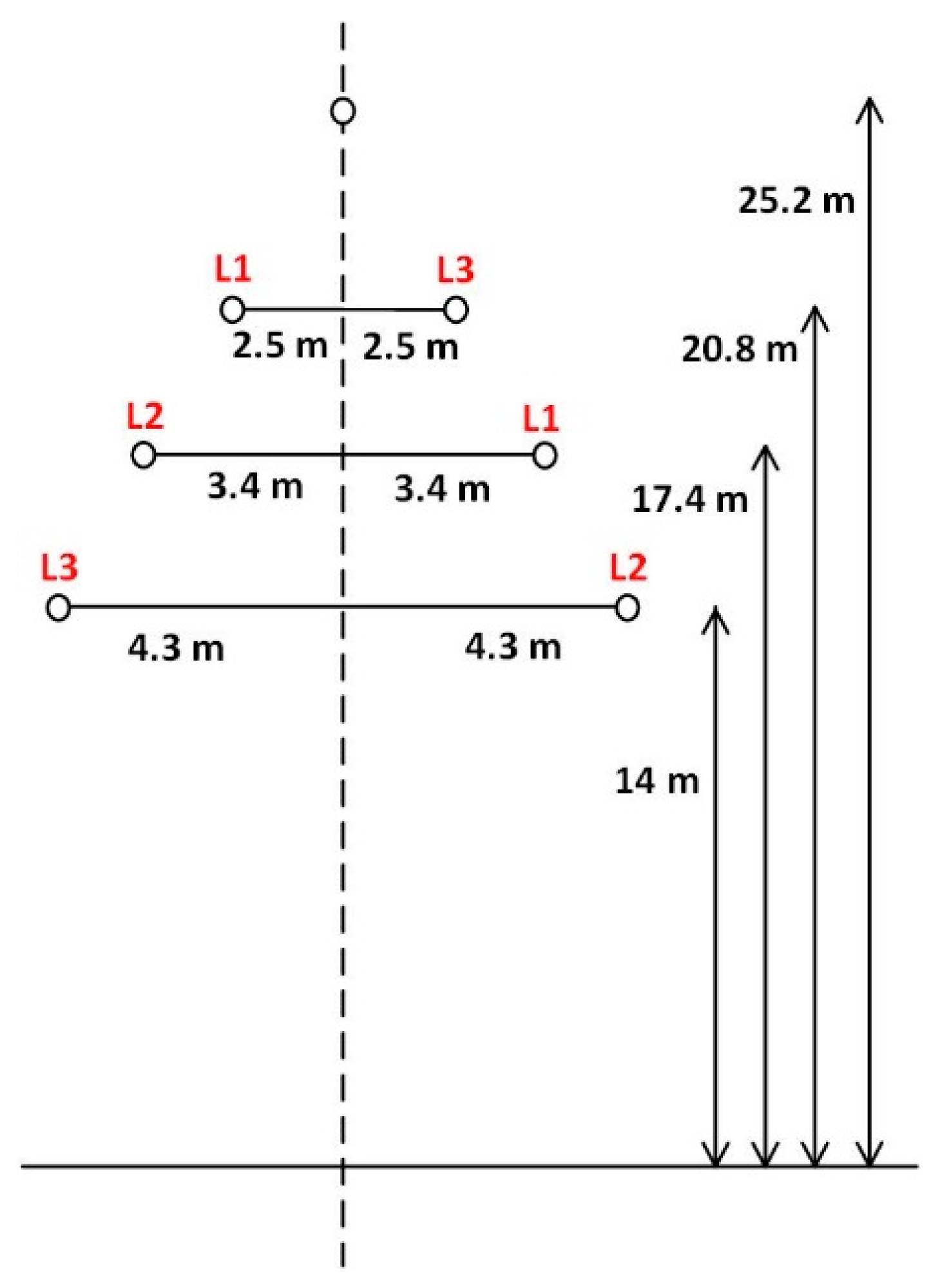
3.1. Mathematical Model of a 110 kV Line
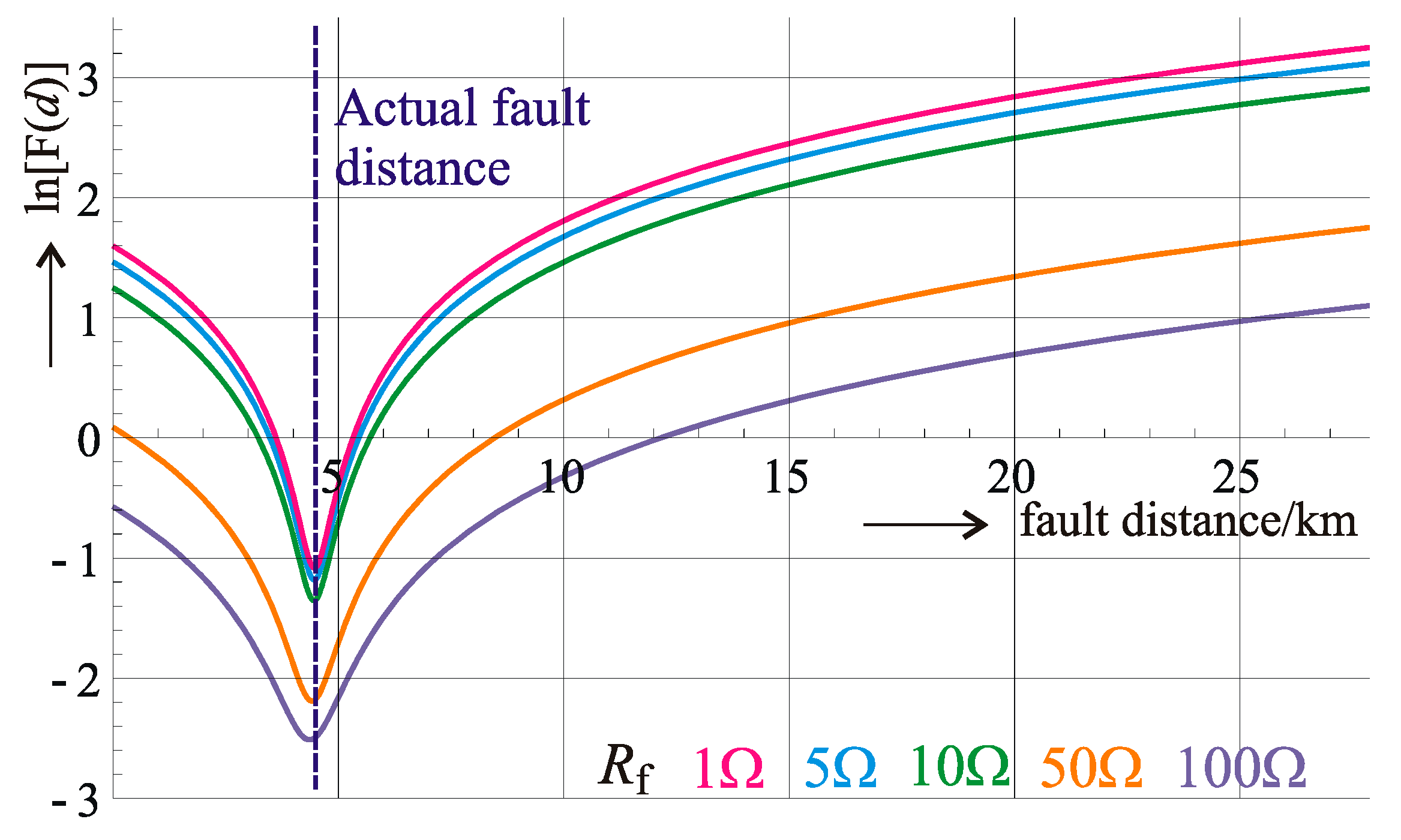
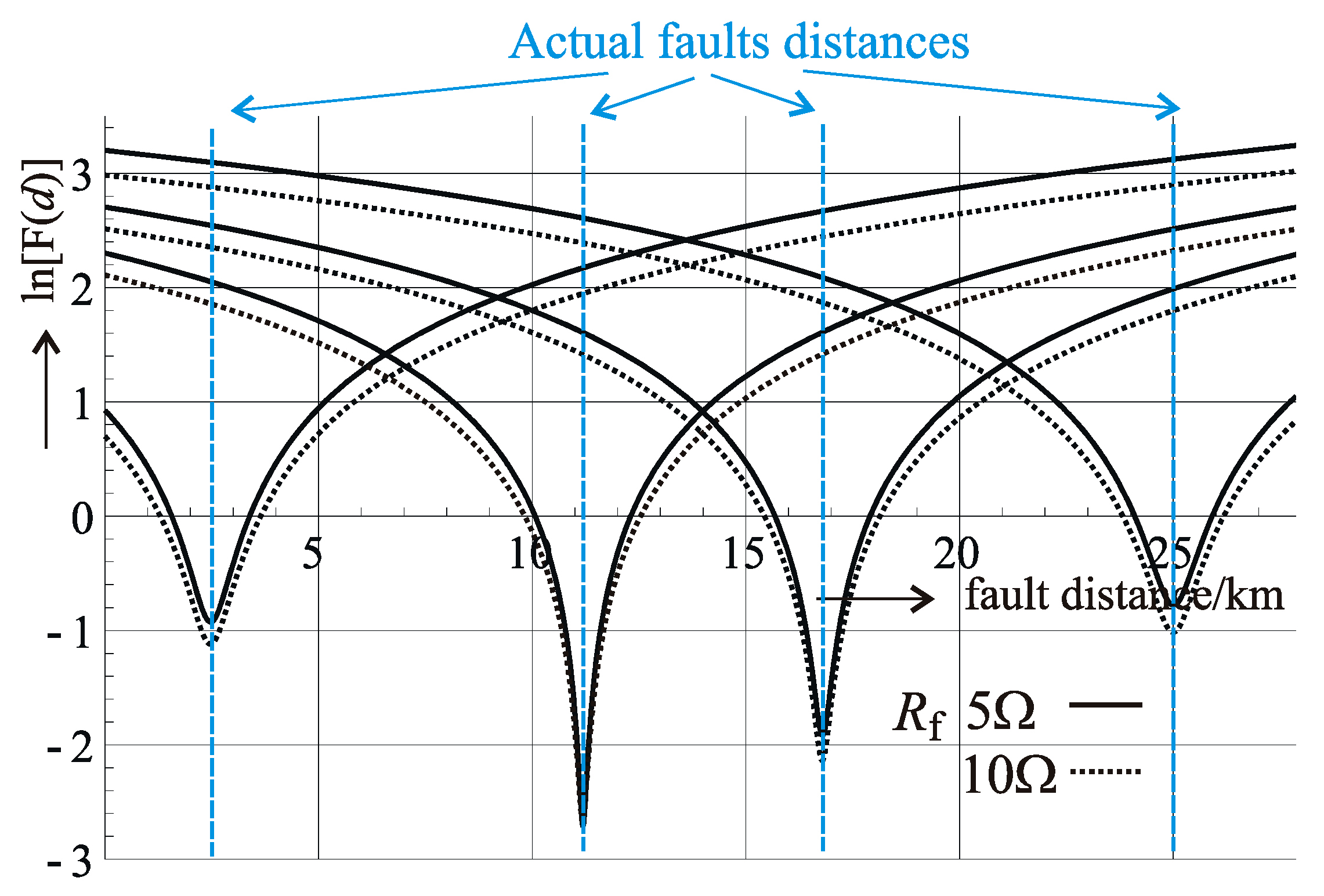
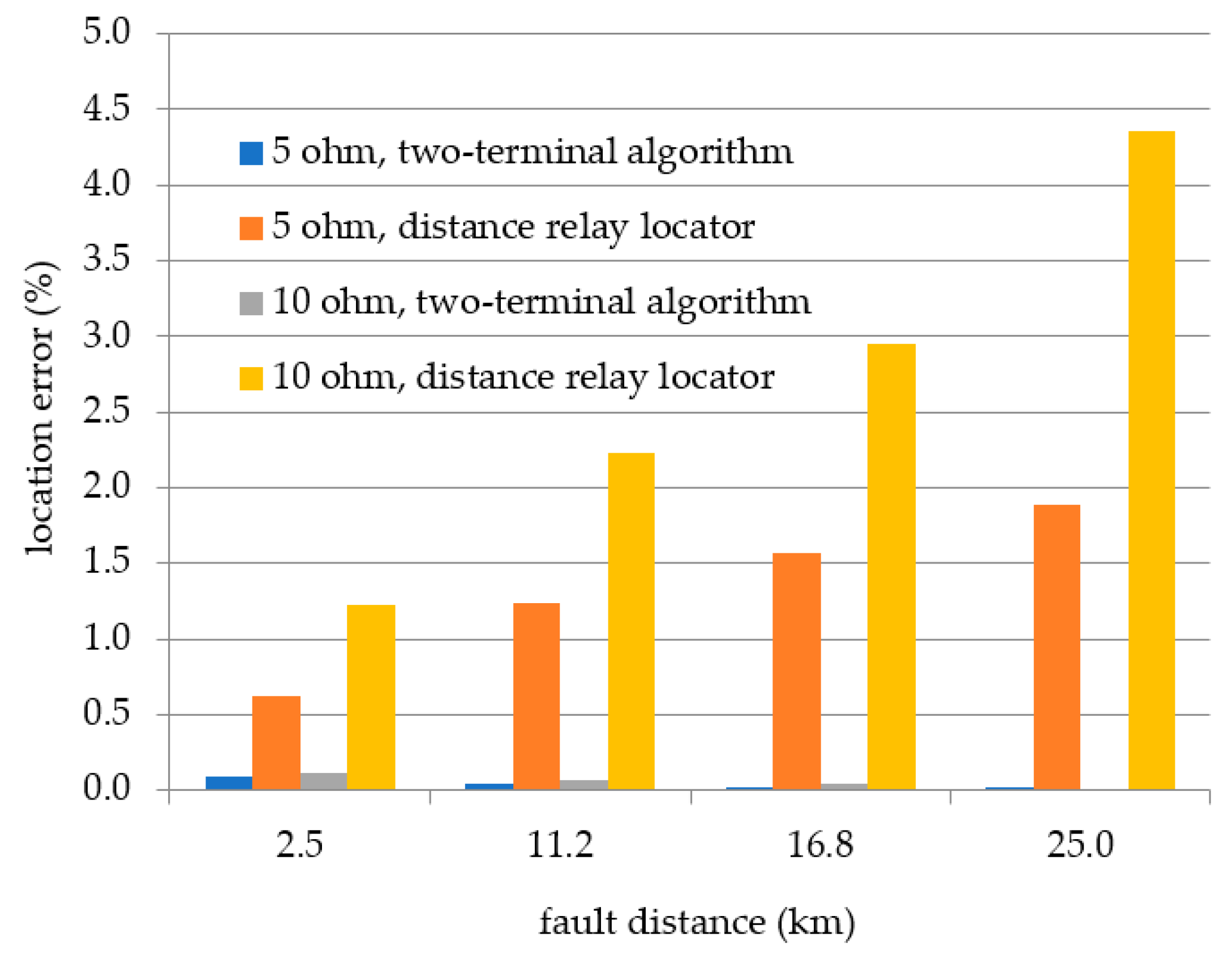
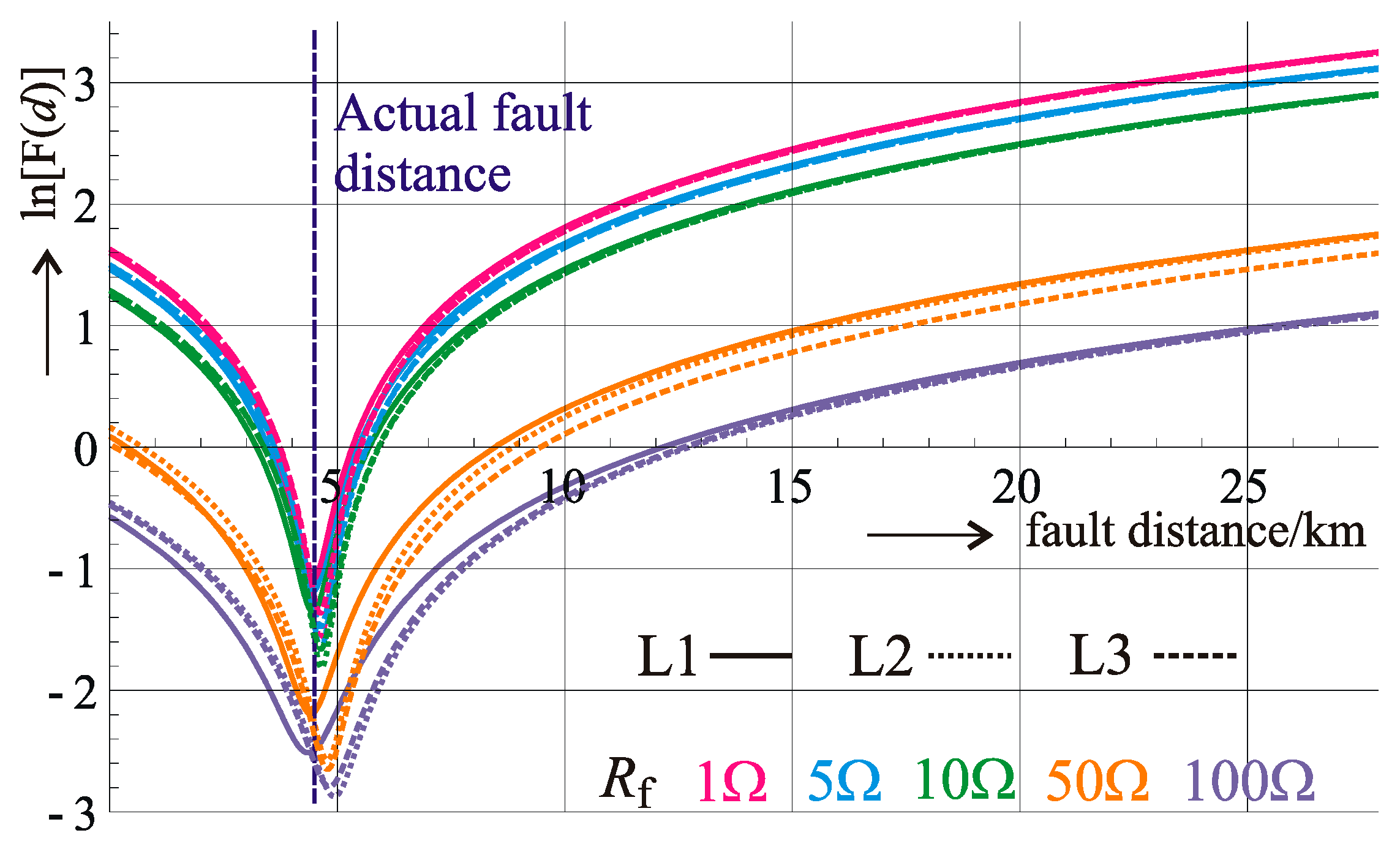
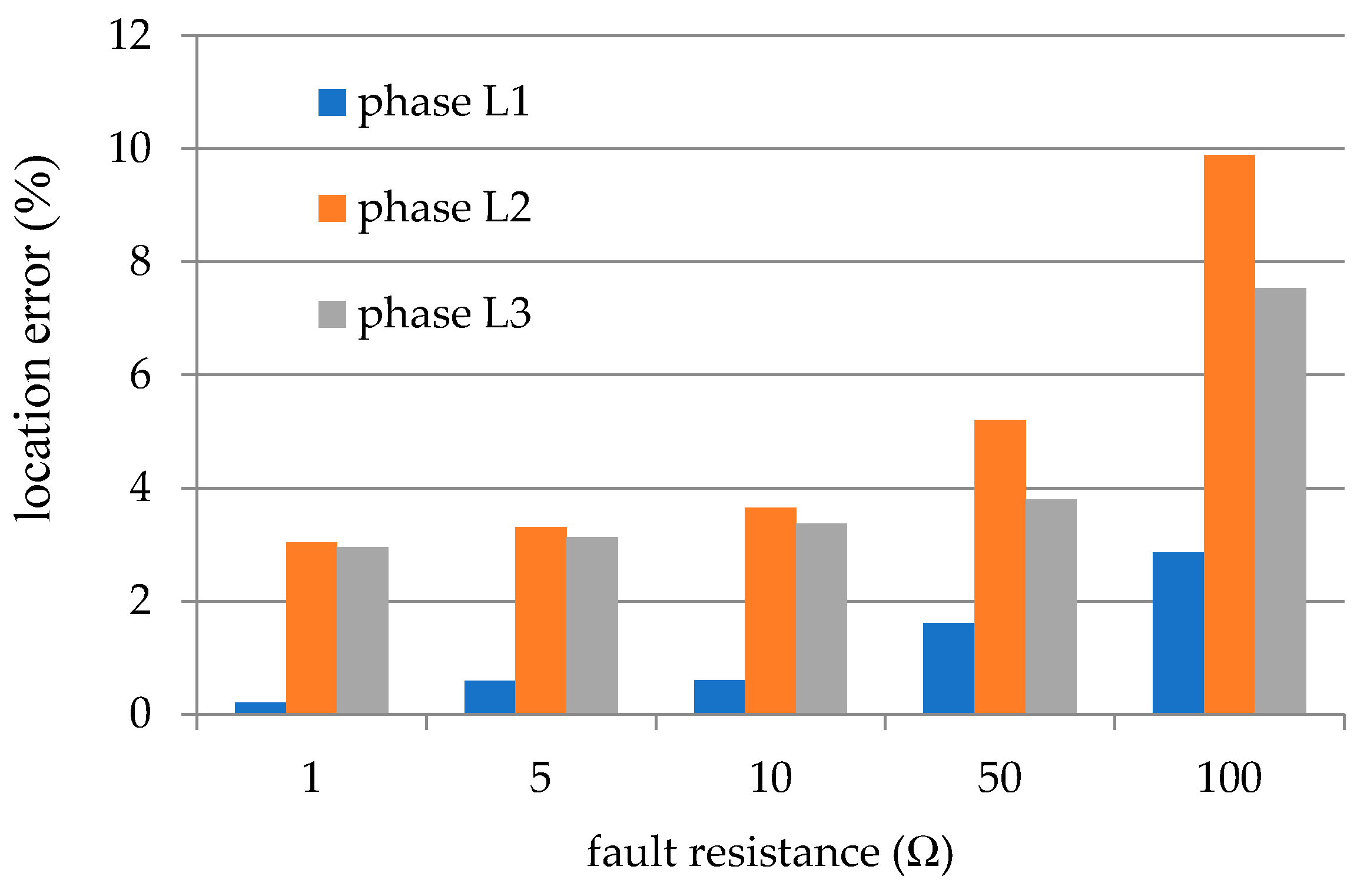
3.2. Impact of the Fault Resistance
3.3. Impact of the Parallel Line
3.4. Impact of the Line Parameters (Line Asymmetry)
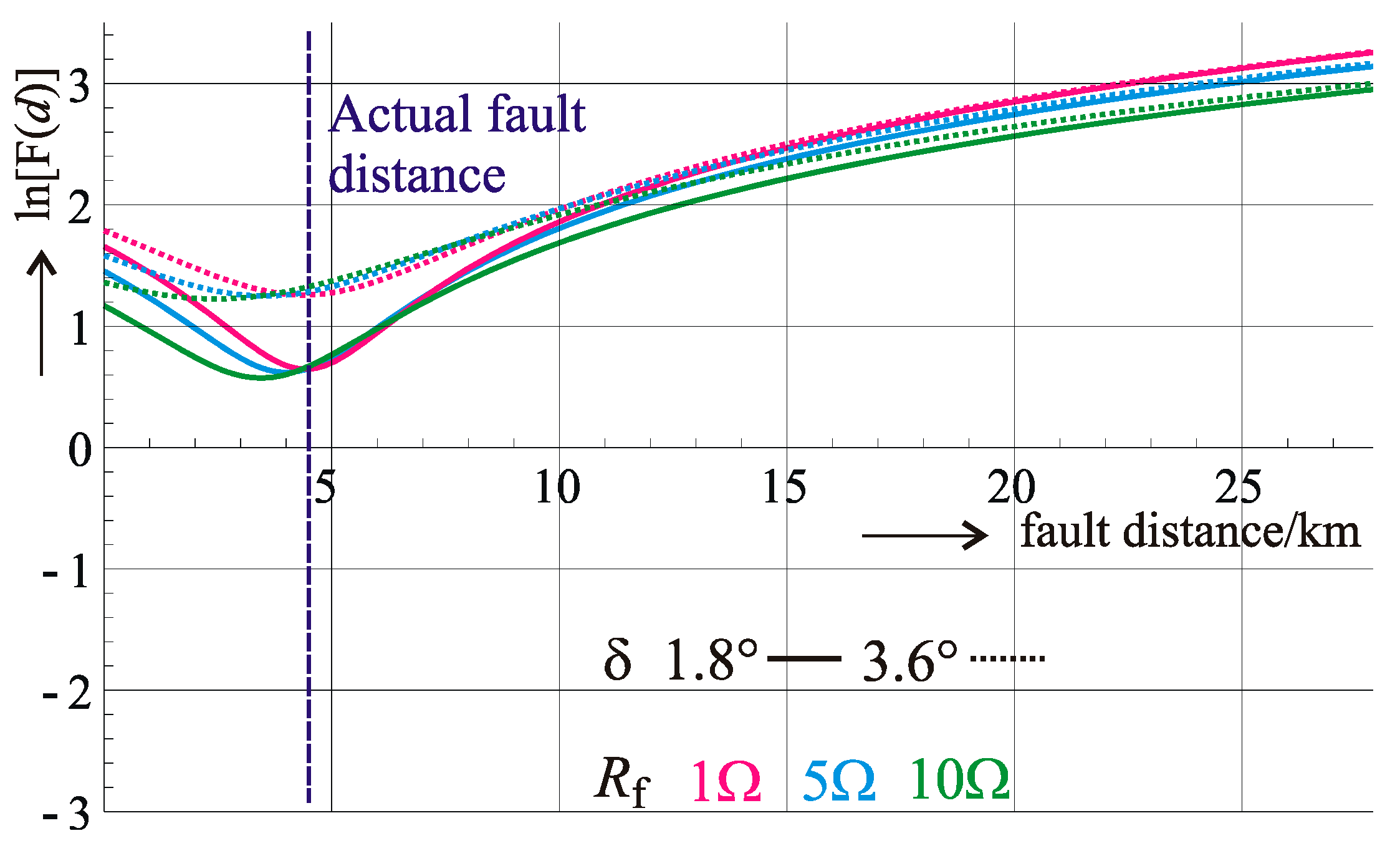
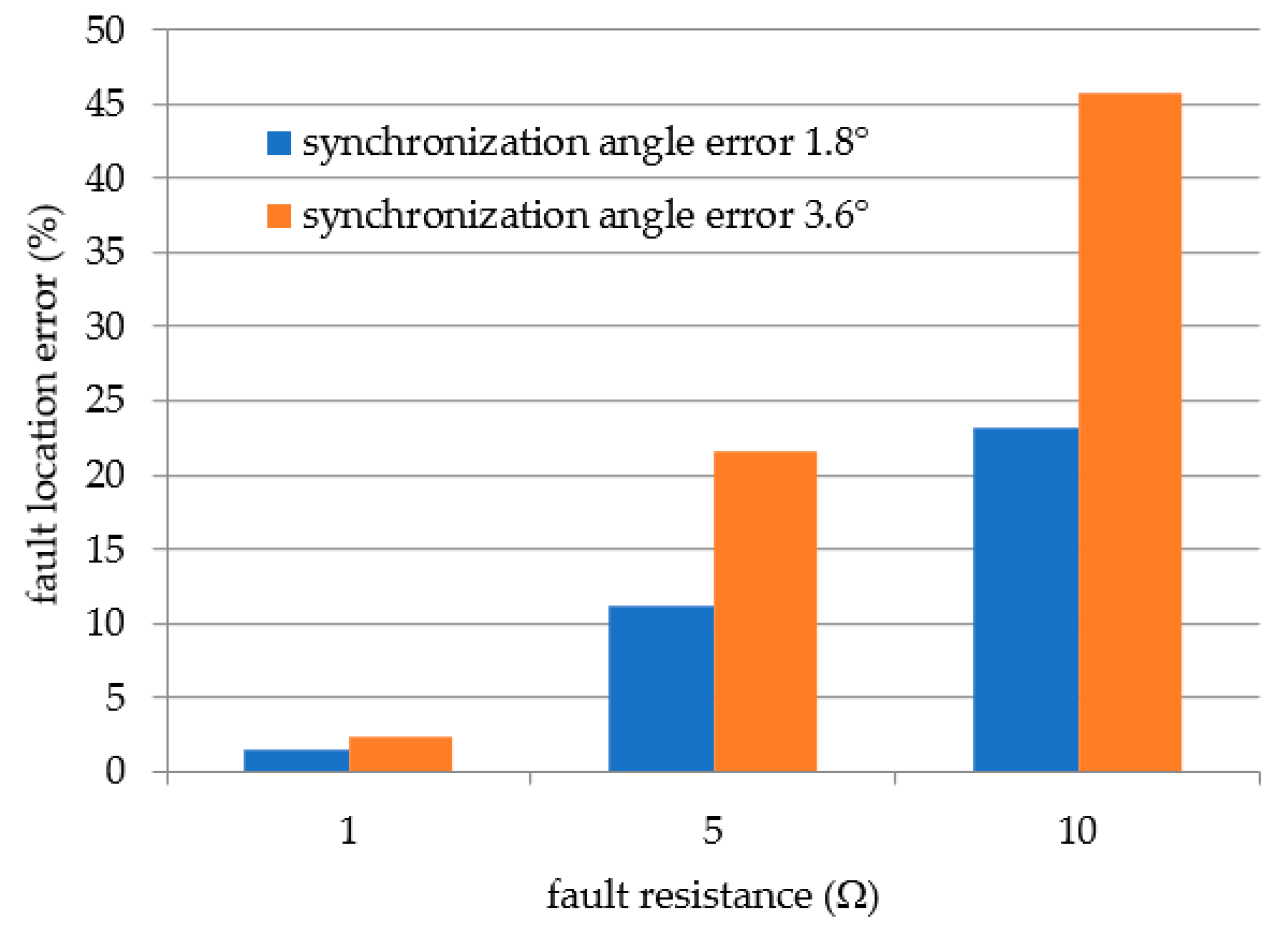
3.5. Impact of the Synchronization Accuracy
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ziegler, G. Numerical Distance Protection, 2nd ed.; Publicis Corporate Publishing: Erlangen, Germany, 2006; pp. 126–147. ISBN 3-89578-266-1. [Google Scholar]
- Makwana, H.; Bhavesh, V.; Bhavesh, B. Distance Relaying Algorithm for a Single Line-To-Ground Fault on Single Infeed Transmission Lines. In Energy Systems in Electrical Engineering; Springer: Singapore, 2016; pp. 17–40. [Google Scholar]
- Pinto Moreira de Souza, D.; da Silva Christo, E.; Rocha Almeida, A. Location of Faults in Power Transmission Lines Using the ARIMA Method. Energies 2017, 10, 1596. [Google Scholar] [CrossRef]
- Tang, J.R.; XiangGen, Y.; Zhe, Z.; ZhiQuin, H.; Lei, Y.; Wang, Y. Fault location in distribution networks using Prony analysis. In Proceedings of the 2011 International Conference on Advanced Power System Automation and Protection, Beijing, China, 12 April 2011; pp. 54–59. [Google Scholar]
- Wadhe, N.S.; Juware, R.A.; Khalsa, N.N. Determining fault location on Transmission Line using Distance Relay. Int. J. Innov. Emerg. Res. Eng. 2016, 3, 625–630. [Google Scholar]
- Pinnegar, C.R.; Mansinha, L. A method of time–time analysis: The TT-transform. Digit. Signal Process. 2003, 13, 588–603. [Google Scholar] [CrossRef]
- Gashteroodkhani, O.A.; Vahidi, B.; Zaboli, A. Time-time matrix z-score vector-based fault analysis method for series-compensated transmission lines. Turk. J. Electr. Eng. Comput. Sci. 2017, 25, 2647–2659. [Google Scholar] [CrossRef]
- Gashteroodkhani, O.A.; Majidi, M.; Etezadi-Amoli, M.; Nematollahi, A.F.; Vahidi, B. A hybrid SVM-TT transform-based method for fault location in hybridtransmission lines with underground cables. Electr. Power Syst. Res. 2019, 170, 205–214. [Google Scholar] [CrossRef]
- Takagi, T.; Yamakoshi, Y.; Yamaura, M. Development of a New Type Fault Locator Using the One-Terminal Voltage and Current Data. IEEE Trans. Power Appar. Syst. 1982, PAS-101, 2892–2898. [Google Scholar] [CrossRef]
- Eriksson, L.; Saha, M.M.; Rockefeller, G.D. An Accurate Fault Locator with Compensation for Apparent Reactance in the Fault Resistance Resulting from Remote-end Infeed. IEEE Trans. Power Appar. Syst. 1985, PAS-104, 424–436. [Google Scholar] [CrossRef]
- Lima, D.A.C.; Ferraz, R.G.; Filomena, A.D.; Bretas, A.S. Electrical power systems fault location with one-terminal data using estimated remote source impedance. In Proceedings of the 2013 IEEE Power & Energy Society General Meeting, Vancouver, BC, Canada, 21–25 July 2013; pp. 1–5. [Google Scholar]
- Lien, K.P.; Liu, C.W.; Yu, C.S.; Jiang, J.A. Transmission network fault location observability with minimal PMU placement. IEEE Trans. Power Deliv. 2006, 21, 1128–1136. [Google Scholar] [CrossRef]
- Johns, A.T.; Jamali, S. Accurate fault location technique for power transmission lines. IEE Proc. C Gener. Transm. Distrib. 1990, 137, 395–402. [Google Scholar] [CrossRef]
- Kezunovic, M.; Perunicic, B. Automated transmission line fault analysis using synchronized sampling at two ends. IEEE Trans. Power Syst. 1996, 11, 441–447. [Google Scholar] [CrossRef]
- Dalcastagne, A.L.; Filho, S.N.; Zurn, H.H.; Seara, R. An Iterative Two-Terminal Fault-Location Method Based on Unsynchronized Phasors. IEEE Trans. Power Deliv. 2008, 23, 2318–2329. [Google Scholar] [CrossRef]
- Yu, C.S. An Unsynchronized Measurements Correction Method for Two-Terminal Fault-Location Problems. IEEE Trans. Power Deliv. 2010, 25, 1325–1333. [Google Scholar] [CrossRef]
- Yu, C.S.; Chang, L.R.; Cho, J.R. New Fault Impedance Computations for Unsynchronized Two-Terminal Fault-Location Computations. IEEE Trans. Power Deliv. 2011, 26, 2879–2881. [Google Scholar] [CrossRef]
- Mehala, N.; Dahiya, R. A Comparative Study of FFT, STFT and Wavelet Techniques for Induction Machine Fault Diagnostic Analysis. In Proceedings of the 7th WSEAS International Conference on Computational Intelligence, Man-Machine Systems and Cybernetics, Cairo, Egypt, 29–31 December 2008; Zaharim, A., Mastorakis, N., Gonos, I., Eds.; World Scientific and Engineering Academy and Society (WSEAS): Stevens Point, WI, USA, 2008; pp. 203–208. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Positive- and negative-sequence impedance | |
| Zero-sequence impedance | |
| Positive- and negative-sequence admittance | |
| Zero-sequence admittance | |
| Residual compensation factor |
| Fault Resistance | Error of the Calculation at the x-Point Terminal (Fault Distance 4.49 km) | Error of the Calculation at the y-Point Terminal (Fault Distance 23.29 km) | ||||||
|---|---|---|---|---|---|---|---|---|
| Proposed Algorithm | Distance Relay Locator | Proposed Algorithm | Distance Relay Locator | |||||
| (Ω) | (m) | (%) | (m) | (%) | (m) | (%) | (m) | (%) |
| 1 | −9 | 0.2 | 83 | 1.8 | 9 | 0.04 | −694 | 3.0 |
| 5 | −26 | 0.6 | 215 | 4.8 | 26 | 0.1 | −1388 | 5.9 |
| 10 | −27 | 0.6 | 402 | 9.0 | 27 | 0.1 | −2361 | 10.1 |
| 50 | −72 | 1.6 | 2908 | 64.8 | 72 | 0.3 | −13,401 | 57.3 |
| 100 | −128 | 2.9 | 9107 | 202.8 | 128 | 0.5 | −32,156 | 137.5 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bukvisova, Z.; Orsagova, J.; Topolanek, D.; Toman, P. Two-Terminal Algorithm Analysis for Unsymmetrical Fault Location on 110 kV Lines. Energies 2019, 12, 1193. https://doi.org/10.3390/en12071193
Bukvisova Z, Orsagova J, Topolanek D, Toman P. Two-Terminal Algorithm Analysis for Unsymmetrical Fault Location on 110 kV Lines. Energies. 2019; 12(7):1193. https://doi.org/10.3390/en12071193
Chicago/Turabian StyleBukvisova, Zuzana, Jaroslava Orsagova, David Topolanek, and Petr Toman. 2019. "Two-Terminal Algorithm Analysis for Unsymmetrical Fault Location on 110 kV Lines" Energies 12, no. 7: 1193. https://doi.org/10.3390/en12071193
APA StyleBukvisova, Z., Orsagova, J., Topolanek, D., & Toman, P. (2019). Two-Terminal Algorithm Analysis for Unsymmetrical Fault Location on 110 kV Lines. Energies, 12(7), 1193. https://doi.org/10.3390/en12071193