Hybrid Electric Vehicle: Design and Control of a Hybrid System (Fuel Cell/Battery/Ultra-Capacitor) Supplied by Hydrogen

Abstract
:1. Introduction
2. Literature Review and Contributions
2.1. PEMFC–Ultra-Capacitor HES EMS Summary
2.2. PEMFC–BT HES EMS Summary
2.3. PEMFC–BT–Ultra-Capacitor HES Summary
2.4. Contributions
- The presence of an accurate energy equipment control considering the energy demand.
- Rationalizing energy consumption by controlling the operation of new zero-emission hybrid electric vehicles.
- Developing accurate algorithms that reflect the behavior of new zero-emission hybrid electric vehicles against critical transition states such as energy storage and recovery.
- The presence of specific energy equipment was controlled by energy demand.
- New zero-emission hybrid electric vehicle operations tested based on an experiments database.
- Reduction of the fuel consumption rate.
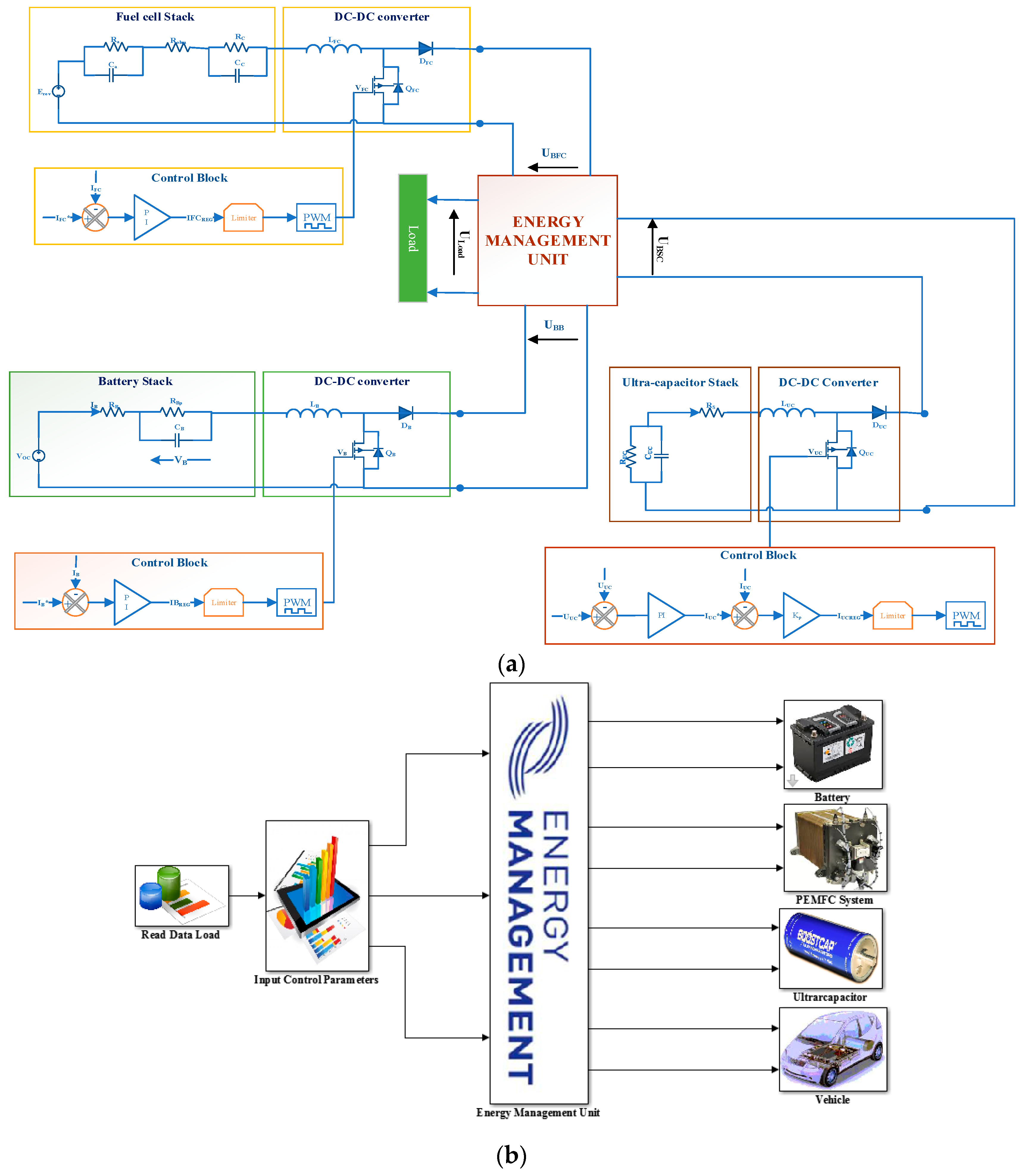
3. System Design
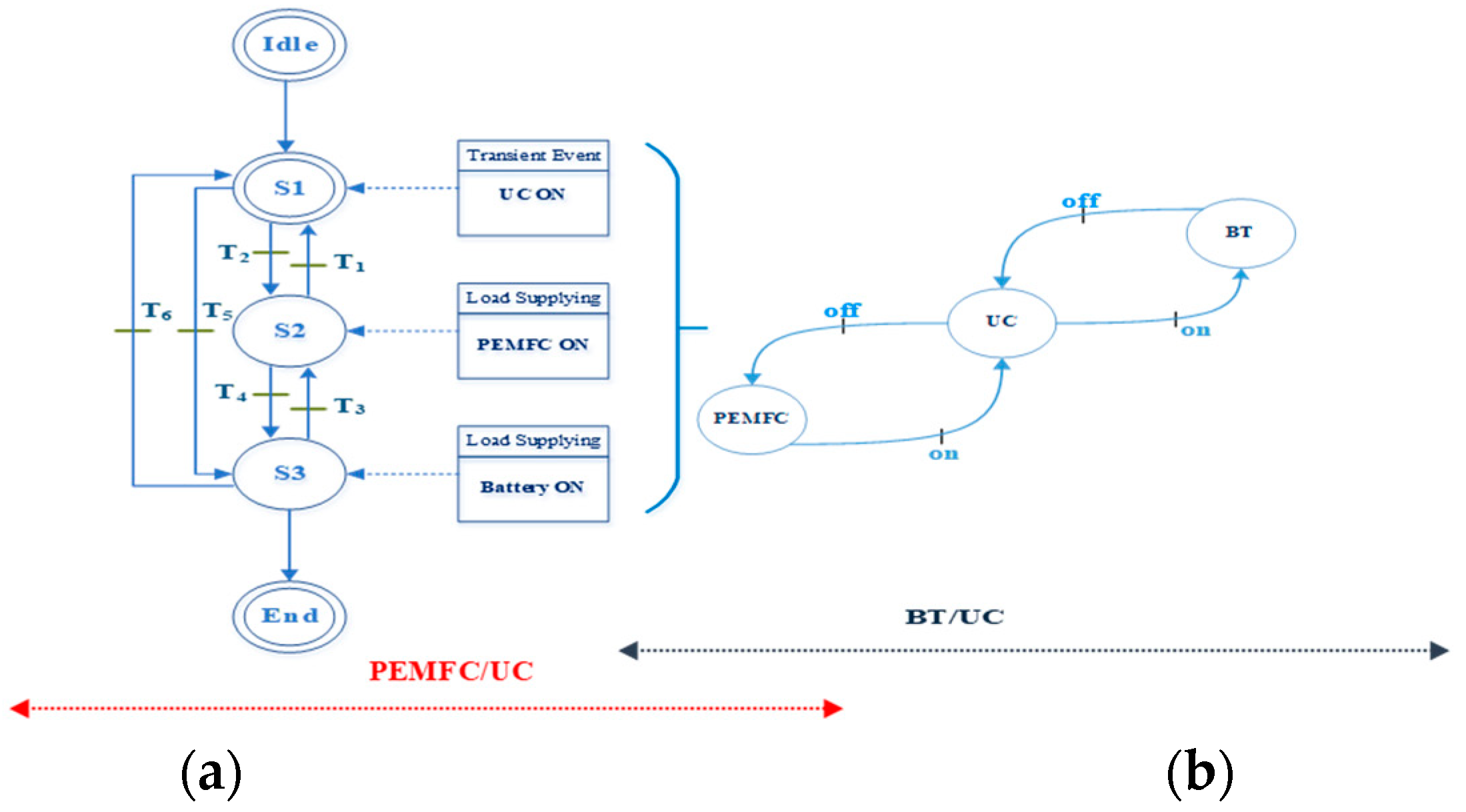
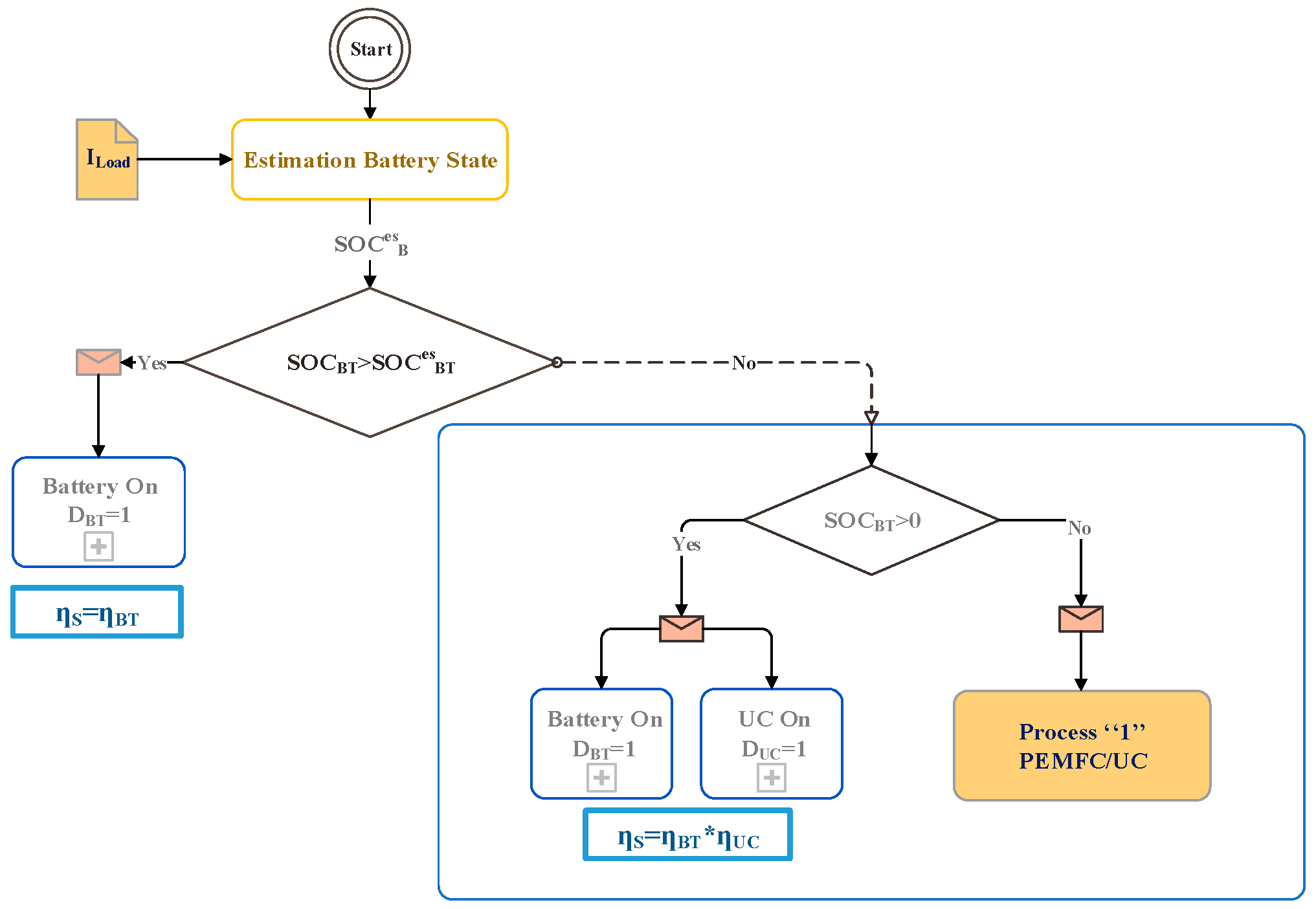
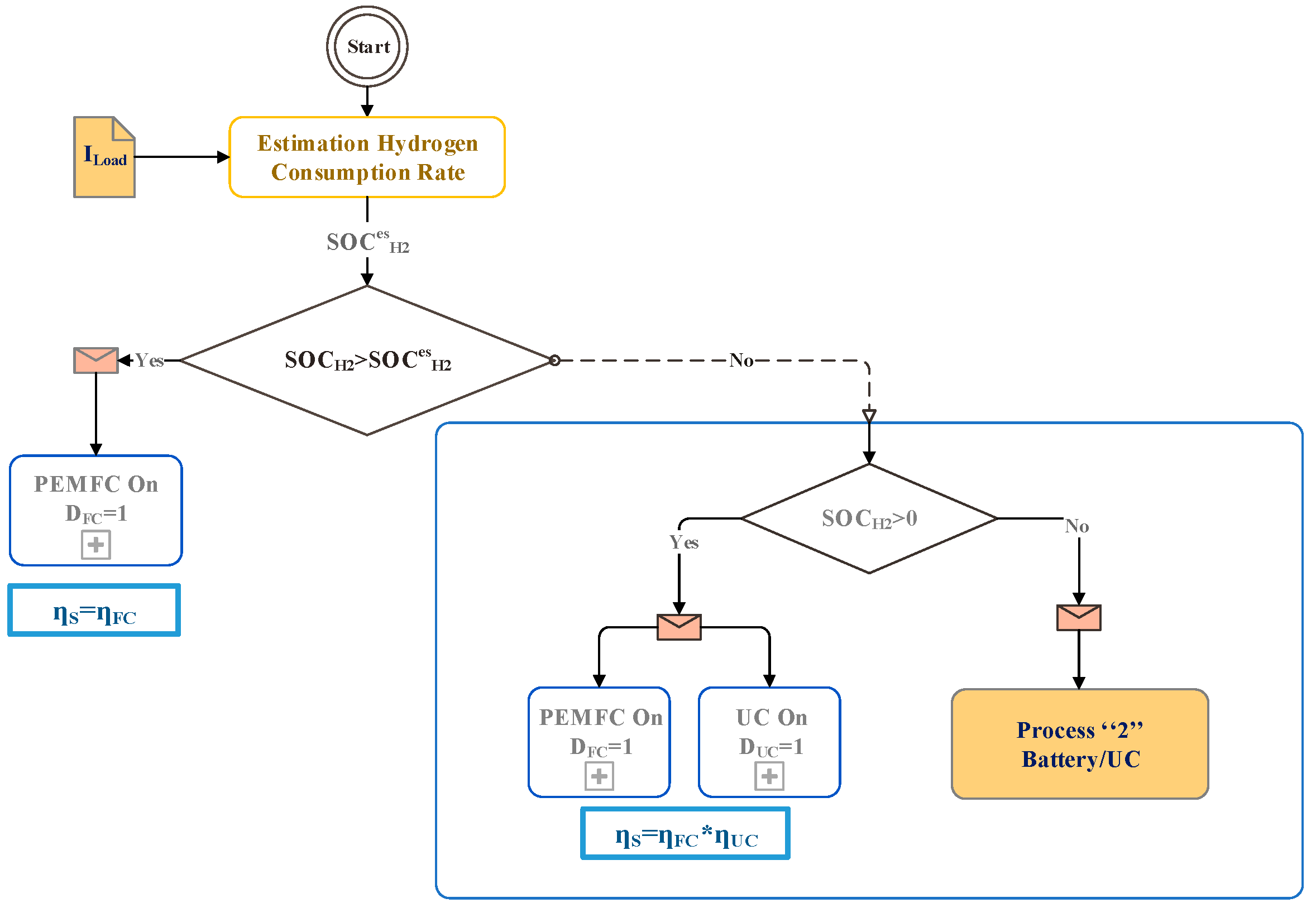
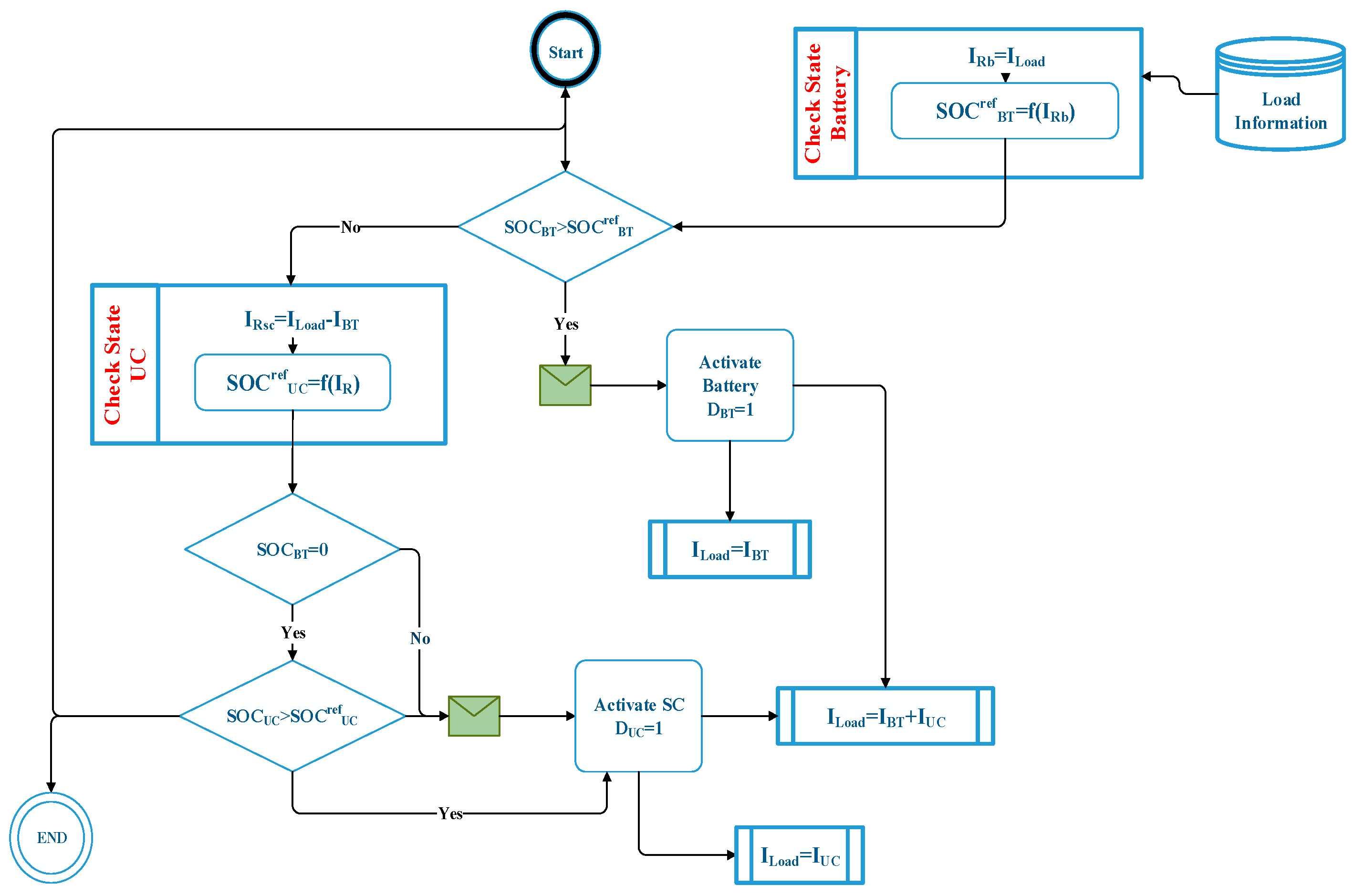
4. Energy Management Unit
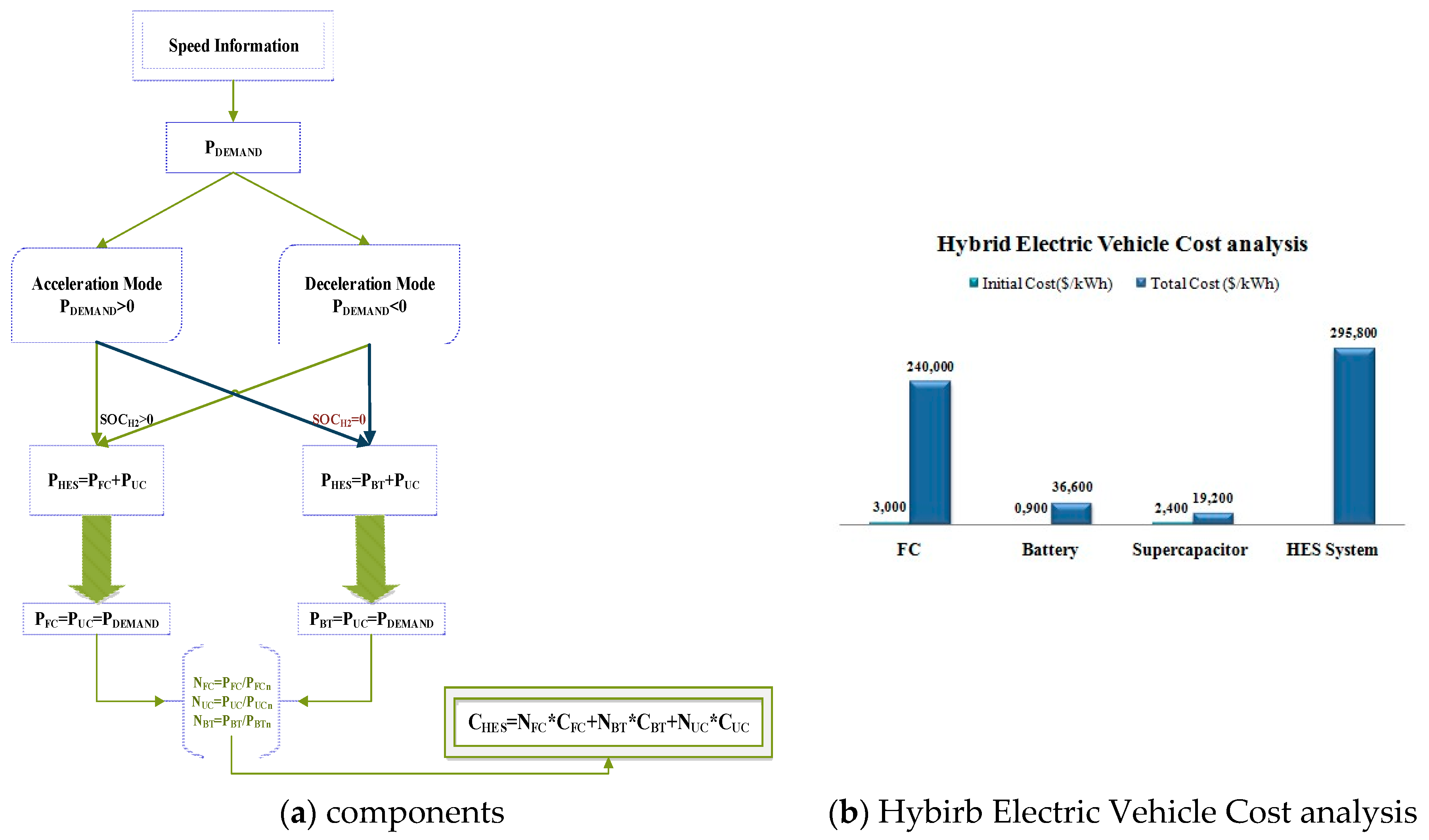
5. System Sizing and Cost Analysis
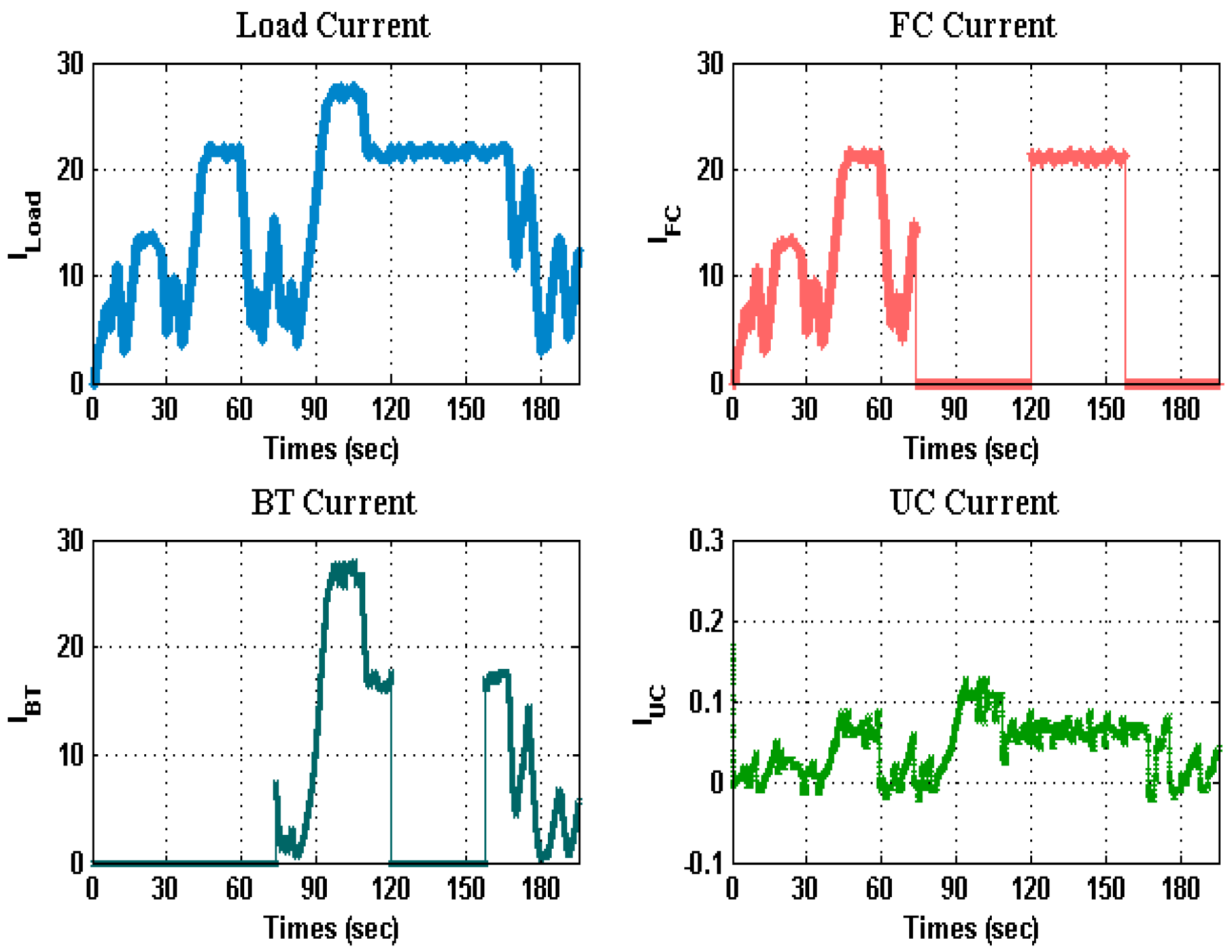
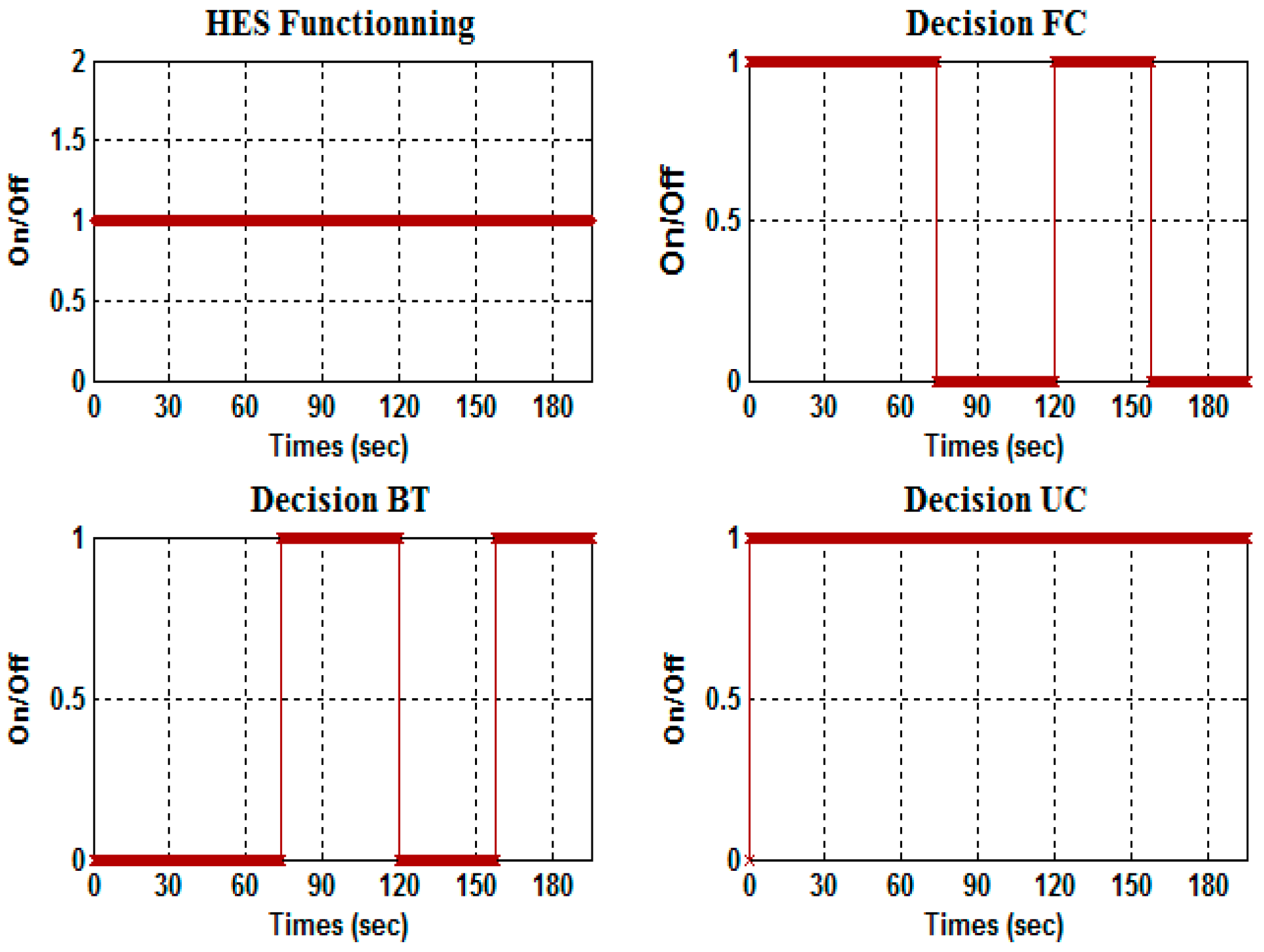
6. Results and Findings
7. Conclusions
Funding
Conflicts of Interest
Nomenclature
| VFC | Voltage of PEMFC Stack (V) | SOCrefH2 | Referential hydrogen fuel State (%) |
| Erev | Reversible voltage (V) | SOCUC | UC State of Charge (%) |
| Ua | Activation overvoltage (V) | SOCrefUC | Referential UC State of Charge (%) |
| Uohm | Ohmic voltage (V) | SOCBT | BT State of Charge (%) |
| Uc | Concentration overvoltage (V) | SOCrefBT | Referential BT State of Charge (%) |
| IFC | Cell Current of PEMFC (A) | SOCH2 | Hydrogen fuel State (%) |
| Rohm | Ohmicresistance (Ω) | LFC | PEMFC Inductance (H) |
| Ra | Anodicresistance (Ω) | αBFC | PEMFC BoostDuty Cycle |
| Rc | Cathodicresistance (Ω) | ULoad | Load Voltage (V) |
| Ca | Anodic capacitance (Ω) | UUC | Voltage of UC (V) |
| Cc | Cathodic capacitance (Ω) | ULUC | Inductance UCVoltage (V) |
| UFC | Dynamic PEMFC Voltage (V) | αBUC | UCBoostDuty Cycle |
| ULFC | Inductance PEMFC Voltage (V) | IUC | Current of UC (A) |
| UBT | Voltage of BT (V) | ηFC | PEMFC efficiency (%) |
| ULBT | Inductance BTVoltage (V) | ηBT | BTefficiency (%) |
| αBBT | BT BoostDuty Cycle | ηUC | UCefficiency (%) |
| UBBT | BT output boost Voltage (V) | ηS | Overall Systemefficiency (%) |
| UBFC | PEMFC boost output voltage (V) | UBUC | UC boost output voltage (V) |
| LBT | BT Inductance (H) | LUC | UC Inductance (H) |
| CBT | BT Capacitance (F) | CUC | UC Capacitance (F) |
Appendix A
References
- Sami, B.S.; Sihem, N.; Zafar, B.; Adnane, C. Performance study and efficiency improvement of hybrid electric system dedicated to transport application. Int. J. Hydrog. Energy 2017, 42, 12777–12789. [Google Scholar] [CrossRef]
- Fathabadi, J.H. Novel fuel cell/battery/supercapacitor hybrid power source for fuel cell hybrid electric vehicles. Energy 2018, 143, 467–477. [Google Scholar] [CrossRef]
- Li, H.; Ravey, A.; N’Diaye, A.; Djerdir, A. A novel equivalent consumption minimization strategy for hybrid electric vehicle powered by fuel cell, battery and supercapacitor. J. Power Sources 2018, 395, 262–270. [Google Scholar] [CrossRef]
- Wu, X.; Gao, D. Optimal robust control strategy of a solid oxide fuel cell system. J. Power Sources 2018, 374, 225–236. [Google Scholar] [CrossRef]
- Henao, N.; Kelouwani, S.; Agbossou, K.; Dubé, Y. Proton exchange membrane fuel cells cold startup global strategy for fuel cell plug-in hybrid electric vehicle. J. Power Sources 2012, 220, 31–41. [Google Scholar] [CrossRef]
- Bayat, P.; Baghramian, A. Implementation of hybrid electric vehicle energy management system for two input power sources. J. Energy Storage 2018, 107, 423–440. [Google Scholar] [CrossRef]
- Nasri, S.; Sami, B.S.; Cherif, A. Power management strategy for hybrid autonomous power system using hydrogen storage. Int. J. Hydrog. Energy 2016, 41, 857–865. [Google Scholar] [CrossRef]
- Wang, Y.; Moura, S.; Advani, S.; Prasad, A. Power management system for a fuel cell/battery hybrid vehicle incorporating fuel cell and battery degradation. Int. J. Hydrog. Energy 2019, 44, 8479–8492. [Google Scholar] [CrossRef]
- Huang, M.; Li, J.-Q. The shortest path problems in battery-electric vehicle dispatching with battery renewal. Sustainability 2016, 8, 607. [Google Scholar] [CrossRef]
- Worku, M. Power Smoothing Control of PMSG Based Wind Generation Using Supercapacitor Energy Storage System. Int. J. Emerg. Electr. Power Syst. 2017, 18. [Google Scholar] [CrossRef]
- Jeddi, N.; Amraoui, L.; Tadeo, F. Modelling and simulation of a BLDC motor speed control system for electric vehicles. Int. J. Electr. Hybrid Veh. 2016, 8, 178–194. [Google Scholar] [CrossRef]
- Sulaiman, N.; Hannan, M.; Mohamed, A.; Majlan, E.; Daud, W.W. A review on Energy Management Unit for fuel cell hybrid electric vehicle: Issues and challenges. Renew. Sustain. Energy Rev. 2015, 52, 802–814. [Google Scholar] [CrossRef]
- Shin, D.; Lee, K.; Chang, N. Fuel economy analysis of fuel cell and supercapacitor hybrid systems. Int. J. Hydrog. Energy 2016, 41, 1381–1390. [Google Scholar] [CrossRef]
- Plötz, P.; Funke, S.; Jochem, P. Empirical Fuel Consumption and CO2 Emissions of Plug-In Hybrid Electric Vehicles. J. Ind. Ecol. 2017, 22, 773–784. [Google Scholar] [CrossRef]
- Azib, T.; Hemsas, K.E.; Larouci, C. Energy management and control strategy of hybrid energy storage system for fuel cell power sources. Int. Rev. Model. Simul. (IREMOS) 2014, 7, 935–944. [Google Scholar] [CrossRef]
- Xu, D.; Liu, Q.; Yan, W.; Yang, W. Adaptive Terminal Sliding Mode Control for Hybrid Energy Storage Systems of Fuel Cell, Battery and Supercapacitor. IEEE Access 2019, 7, 29295–29303. [Google Scholar] [CrossRef]
- Weyers, C.; Bocklisch, T. Simulation-based investigation of energy management concepts for fuel cell–battery–hybrid energy storage systems in mobile applications. Energy Procedia 2018, 155, 295–308. [Google Scholar] [CrossRef]
- Zhan, Y.; Guo, Y.; Zhu, J.; Li, L. Power and energy management of grid/PEMFC/battery/supercapacitor hybrid power sources for UPS applications. Int. J. Electr. Power Energy Syst. 2015, 67, 598–612. [Google Scholar] [CrossRef] [Green Version]
- Odeim, F.; Roes, J.; Heinzel, A. Power management optimization of an experimental fuel cell/battery/Supercapacitor hybrid system. Energies 2015, 8, 6302–6327. [Google Scholar] [CrossRef]
- Thounthong, P.; Pierfederici, S.; Martin, J.; Hinaje, M.; Davat, B. Modeling and Control of Fuel Cell/Supercapacitor Hybrid Source Based on Differential Flatness Control. IEEE Trans. Veh. Technol. 2010, 59, 2700–2710. [Google Scholar] [CrossRef]
- Reddy, K.J.; Natarajan, S. Energy sources and multi-input DC-DC converters used in hybrid electric vehicle applications—A review. Int. J. Hydrogen Energy 2018, 43, 17387–17408. [Google Scholar] [CrossRef]
- Horrein, L.; Bouscayrol, A.; Cheng, Y.; Dumand, C.; Colin, G.; Chamaillard, Y. Influence of the heating system on the fuel consumption of a hybrid electric vehicle. Energy Convers. Manag. 2016, 129, 250–261. [Google Scholar] [CrossRef]
- Karunarathne, L.; Economou, J.; Knowles, K. Model based power and energy management system for pem fuel cell li-ion battery driven propulsion system. In Proceedings of the 5th IET International Conference ON Power Electronics, Machines and Drives, Brighton, UK, 19–21 April 2010. [Google Scholar]
- Alloui, H.; Becherif, M.; Marouani, K. Modelling and frequency separation energy management of fuel cell–battery hybrid sources system for hybrid electric vehicle. In Proceedings of the 21st Mediterranean Conference on Control & Automation (MED), Chania, Greece, 25–28 June 2013; pp. 646–651. [Google Scholar]
- Xiao, D.; Wang, Q. The research of energy management strategy for fuel cell hybrid vehicle. In Proceedings of the International Conference on Industrial Control and Electronics Engineering, Xi’an, China, 23–25 August 2012; pp. 931–934. [Google Scholar]
- Sundstrom, O.; Stefanopoulou, A. Optimal power split in fuel cell hybrid electric vehicle with different battery sizes, drive cycles, and objectives. In Proceedings of the International Conference on Control Applications, Munich, Germany, 4–6 October 2006; pp. 1681–1689. [Google Scholar]
- Hannan, M.; Azidin, F.; Mohamed, A. Multi-sources model and control algorithm of an Energy Management Unit for light electric vehicles. Energy Convers. Manag. 2012, 62, 123–130. [Google Scholar] [CrossRef]
- García, P.; Torreglosa, J.; Fernández, L.; Jurado, F. Control strategies for high-power electric vehicles powered by hydrogen fuel cell, battery and supercapacitor. Expert Syst. Appl. 2013, 40, 4791–4804. [Google Scholar] [CrossRef]
- Bauman, J.; Kazerani, M. A comparative study of Fuel-Cell–Battery, Fuel-Cell–Ultracapacitor, and Fuel-Cell–Battery–Ultracapacitor vehicles. IEEE Trans. Veh. Technol. 2008, 57, 760–769. [Google Scholar] [CrossRef]
- Martinez, J.S.; Hissel, D.; Pera, M.; AMIET, M. Practical Control Structure and Energy Management of a Testbed Hybrid Electric Vehicle. IEEE Trans. Veh. Technol. 2011, 60, 4139–4152. [Google Scholar] [CrossRef]
- Fathabadi, H. Novel standalone hybrid solar/wind/fuel cell/battery power generation system. Energy 2017, 140, 454–465. [Google Scholar] [CrossRef]
- Jia, J.; Wang, G.; Cham, Y.T.; Wang, Y.; Han, M. Electrical characteristic study of a hybrid PEMFC and Ultracapacitor system. IEEE Trans. Ind. Electron. 2010, 57, 1945–1953. [Google Scholar]
- Greenwell, W.; Vahidi, A. Predictive control of voltage and current in a fuel Cell–Ultracapacitor hybrid. IEEE Trans. Ind. Electron. 2010, 57, 1954–1963. [Google Scholar] [CrossRef]
- Allag, T.; Das, T. Robust control of solid oxide fuel cell Ultracapacitor hybrid system. IEEE Trans. Control Syst. Technol. 2011, 20, 1–10. [Google Scholar] [CrossRef]
- Madani, O.; Bhattacharjee, A.; Das, T. Decentralized power management in a hybrid fuel cell Ultracapacitor system. IEEE Trans. Control Syst. Technol. 2016, 24, 765–778. [Google Scholar] [CrossRef]
- Gharibeh, H.F.; Yazdankhah, A.S.; Azizian, M.R. Improved energy management for a power-split multi-source fuel cell vehicle based on optimal source sizing and regenerative braking. In Proceedings of the IEEE 16th International Conference on Environment and Electrical Engineering (EEEIC), Florence, Italy, 7–10 June 2016. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method/Control Strategy | References | Advantage | Drawbacks |
|---|---|---|---|
| Polynomial-Control Technique (PCT) | [21] |
|
|
| Two-Fuzzy-Logic Controllers (FLCs) were applied to govern gear box prototype | [23,24] |
|
|
| Differential Flatness Controls (DFC) | [22] |
|
|
| Method/Control Strategy | References | Advantage | Drawbacks |
|---|---|---|---|
| Operational Mode Strategy (OMS) based on 4 modes | [27] | Achieve the braking energy regeneration | The Obtained results showed only a mathematical Simulation |
| [25,26] | An EMS was effective proven and justified | The results obtained showed a poorly implemented mathematical simulation tool |
| Optimal Control Strategy (OCS) using Deterministic Dynamic Programming (DDP) | [28] | PEMFC–BT Hybridization system is beneficial for mild driving cycles | The results showed only the performance of the battery size |
| Method/Control Strategy | References | Advantage | Drawbacks |
|---|---|---|---|
| Operational Mode Control (OMC) based on 7states | [29] | During the acceleration mode, a better performance is obtained | The obtained results showed only a mathematical Simulation for short duration |
| Five control strategies were used like Fuzzy Logic Controller (FLC), Predictive Control (PC), etc… | [30] | The compared results show the lowest hydrogen mass consumption | The obtained results Focused only on FLC. |
| Fuzzy Logic Controller (FLC). | [31,32] | The proposed system was modelled using Energetic Macroscopic Representation | The obtained results Focused only on the material |
| State | Transition | Transition Description | Previous State | Description |
|---|---|---|---|---|
| Idle | No transition | System Startup | ||
| S1 | No transition | Transition event detection | Idle | Activation of UC |
| T1 | S1 | |||
| T6 | S2 | |||
| S2 | T2 | Sufficient hydrogen fuel | S1 | Activation of PEMFC |
| T3 | Insufficient battery power | S3 | ||
| S3 | T4 | Insufficient hydrogen fuel | S2 | Activation of BT |
| T5 | Sufficient battery power and insufficient hydrogen fuel | S1 |
| BT | FC | UC | System Efficiency |
|---|---|---|---|
| 0 | 0 | 1 | ηS = ηUC |
| 0 | 1 | 0 | ηS = ηFC |
| 0 | 1 | 1 | ηS = ηFC × ηUC |
| 1 | 0 | 0 | ηS = ηBT |
| 1 | 0 | 1 | ηS = ηBT × ηUC |
| 1 | 1 | 1 | ηS = ηBT × ηFC × ηUC |
| Condition | Decision | Description |
|---|---|---|
| SOCBT > SOCrefBT | BT ON | Load feeded by BT |
| SOCBT < SOCrefBT SOCBT = 0 SOCUC > SOCrefUC | BT OFF UC ON | Load feeded by UC |
| SOCBT < SOCrefBT SOCBT > 0 SOCUC > SOCrefUC | BT ON UC ON | Load feeded by both BT and UC |
| PDEMAND = 40 kW | Power Sizing (W) | Cost ($/kWh) per Module |
|---|---|---|
| PFCn | 500 | 3000 |
| NFC | 80 | |
| PBTn | 900 | 900 |
| NBT | 44 | |
| PUCn | 5600 | 2400 |
| NUC | 8 |
| Parameters | Values |
|---|---|
| Hybrid Electric System (HES) | |
| The load resistance: RL | 0.024 Ω |
| The Ohmic resistance: Rohm | 1.2798 mΩ |
| The load inductance: CL | 50 μF |
| The UC inductance: LUC | 50 Μh |
| The UC voltage: UUC | 14.7 V |
| Anodic and cathodic capacitances: Ca=Cc | 2.1989F |
| Anode indictance: εa | 0.45 F−1 |
| Anode indictance: εc | 0.45 F−1 |
| The UC series resistance: Rs | 0.019 Ω |
| The UC parallel resistance: Rp | 2.0396 × 10−8 Ω |
| The PEMFC inductance: Lfc | 50 μH |
| The PEMFC resistance: Rfc | Rfc = 10 mΩ |
| UC duty cycle: αBUC | 0.39 |
| BT duty cycle: αBBT | 0.39 |
| Fuel cell duty cycle: αBFC | 0.48 |
| The anodic and cathodic resistance: Ra, Rc | 1.3 mΩ |
| The BT inductance: LUC | 50 Μh |
| The BT voltage: UBT | 16 V |
© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gherairi, S. Hybrid Electric Vehicle: Design and Control of a Hybrid System (Fuel Cell/Battery/Ultra-Capacitor) Supplied by Hydrogen. Energies 2019, 12, 1272. https://doi.org/10.3390/en12071272
Gherairi S. Hybrid Electric Vehicle: Design and Control of a Hybrid System (Fuel Cell/Battery/Ultra-Capacitor) Supplied by Hydrogen. Energies. 2019; 12(7):1272. https://doi.org/10.3390/en12071272
Chicago/Turabian StyleGherairi, Salsabil. 2019. "Hybrid Electric Vehicle: Design and Control of a Hybrid System (Fuel Cell/Battery/Ultra-Capacitor) Supplied by Hydrogen" Energies 12, no. 7: 1272. https://doi.org/10.3390/en12071272
APA StyleGherairi, S. (2019). Hybrid Electric Vehicle: Design and Control of a Hybrid System (Fuel Cell/Battery/Ultra-Capacitor) Supplied by Hydrogen. Energies, 12(7), 1272. https://doi.org/10.3390/en12071272