A New Machine-Learning Prediction Model for Slope Deformation of an Open-Pit Mine: An Evaluation of Field Data

 , and
, and
Abstract
:1. Introduction
2. The Proposed Method
2.1. Relevance Vector Machine
2.2. Adaptive Network-Based Fuzzy Inference System
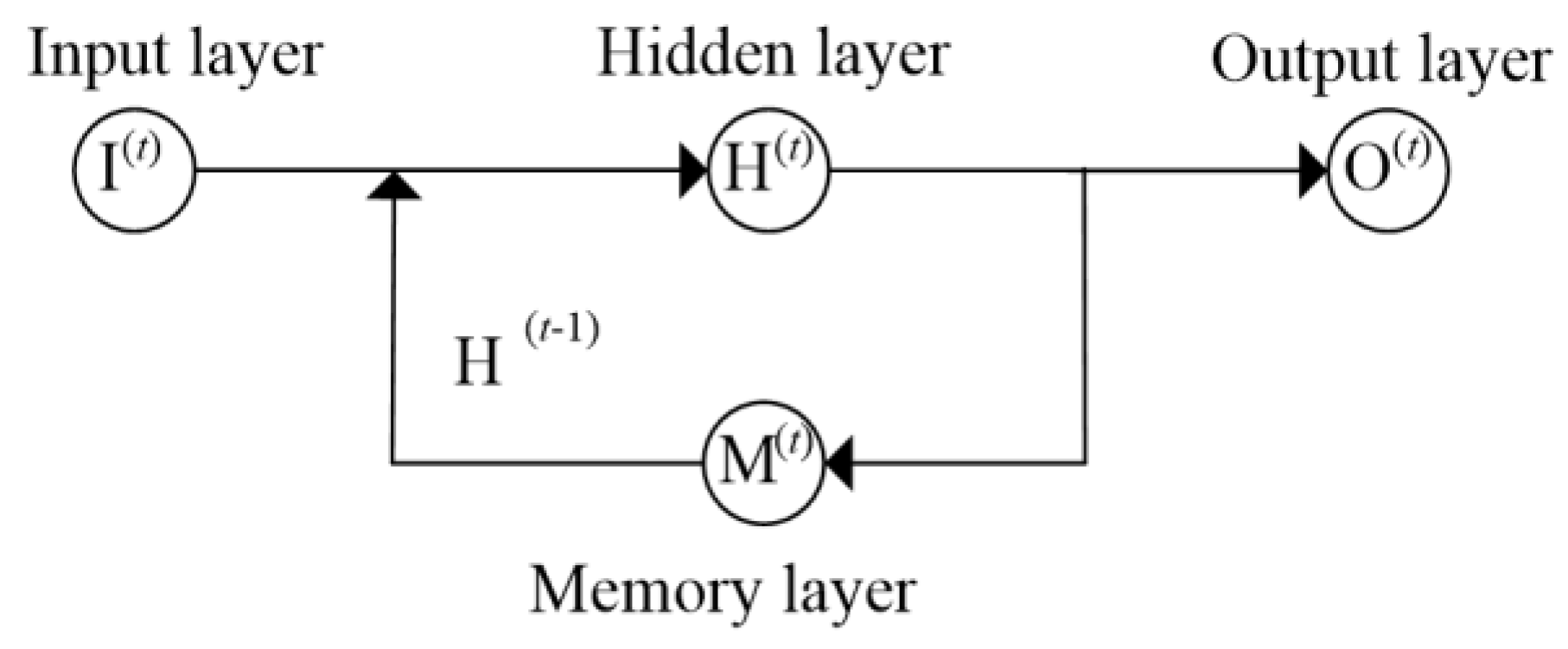
2.3. Recurrent Neural Network
3. Field Data
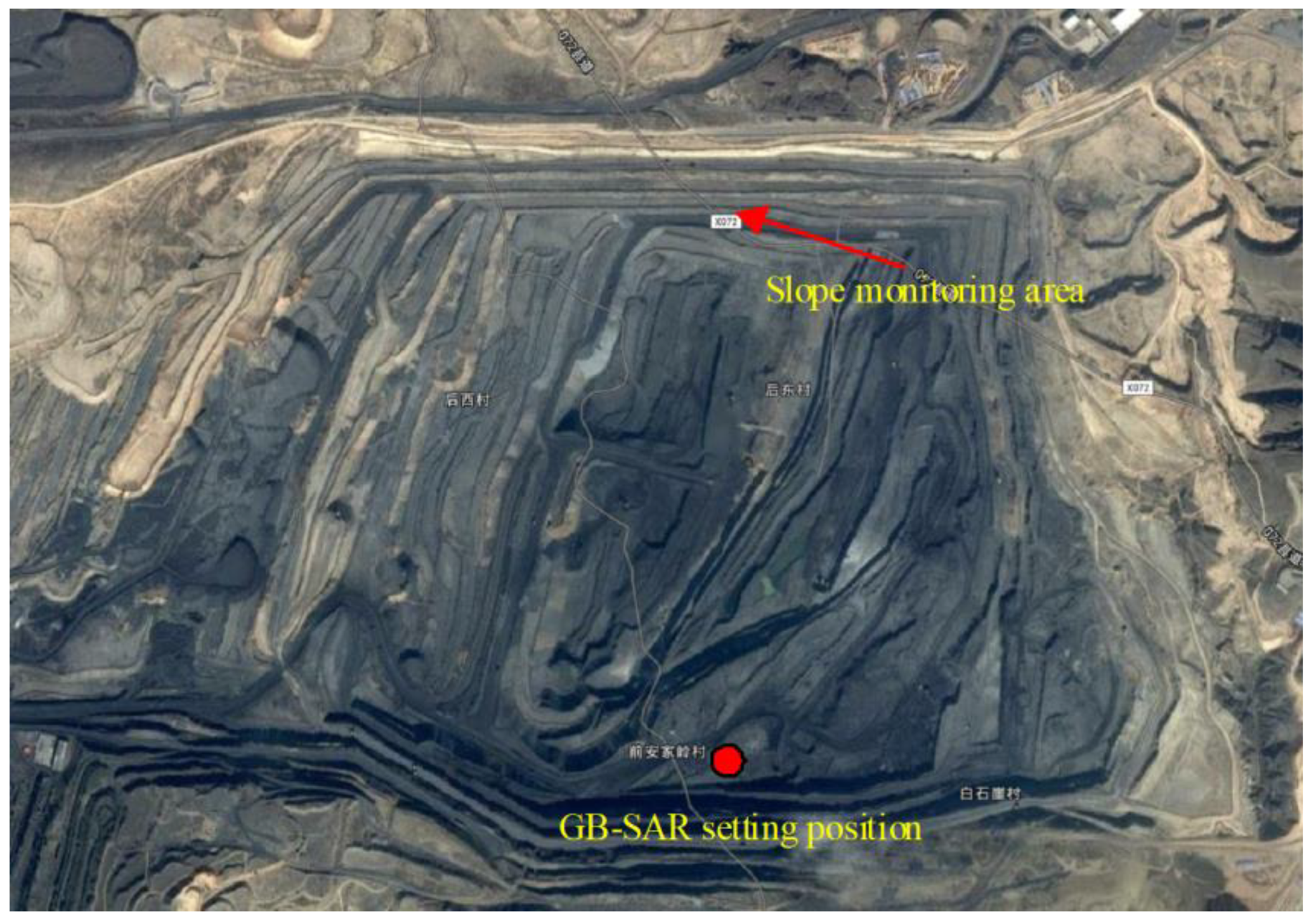
3.1. Geological Survey of Anjialing Mine
3.2. Data Acquisition
3.3. Field Geology Tests
4. Result and Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Vaziri, A.; Moore, L.; Ali, H. Monitoring systems for warning impending failures in slopes and open pit mines. Nat. Hazards 2010, 55, 501–512. [Google Scholar]
- Xu, Q. Theoretical studies on prediction of landslides using slope deformation process data. J. Eng Geol. 2012, 20, 145–151. [Google Scholar]
- Yang, Y.; Wang, Z. Grey prediction research of slope deformation. Electron. J. Geotech. Eng. 2013, 18, 1255–1266. [Google Scholar]
- Dick, G.; Erik, E.; Albert, G.; Doug, S.; Nick, D. Development of an early-warning time-of-failure analysis methodology for open-pit mine slopes utilizing ground-based slope stability radar monitoring data. Can. Geotech. J. 2014, 52, 515–529. [Google Scholar] [CrossRef]
- Carlà, T.; Farina, P.; Intrieri, E.; Ketizmen, H.; Casagli, N. Integration of ground-based radar and satellite InSAR data for the analysis of an unexpected slope failure in an open-pit mine. Eng. Geol. 2018, 235, 39–52. [Google Scholar] [CrossRef]
- Nie, L.; Li, Z.; Lv, Y.; Wang, H. A new prediction model for rock slope failure time: A case study in West Open-Pit mine, Fushun, China. Bull. Eng. Geol. Environ. 2017, 76, 975–988. [Google Scholar] [CrossRef]
- Casagli, N.; Catani, F.; Del Ventisette, C.; Luzi, G. Monitoring, prediction, and early warning using ground-based radar interferometry. Landslides 2010, 7, 291–301. [Google Scholar] [CrossRef]
- Zheng, D.; Gu, C.; Wu, Z. Time series evolution forecasting model of slope deformation based on multiple factors. Chin. J. Rock Mech. Eng. 2005, 24, 3180–3184. [Google Scholar]
- Kong, F.; Lu, D.; Du, X.; Shen, C. Displacement analytical prediction of shallow tunnel based on unified displacement function under slope boundary. Int. J. Numer. Anal. Methods Geomech. 2019, 43, 183–211. [Google Scholar] [CrossRef]
- Osasan, K.S.; Stacey, T.R. Automatic prediction of time to failure of open pit mine slopes based on radar monitoring and inverse velocity method. Int. J. Min. Sci. Technol. 2014, 24, 275–280. [Google Scholar] [CrossRef]
- Strenk, P.; Wartman, J. Uncertainty in seismic slope deformation model predictions. Eng. Geol. 2011, 122, 61–72. [Google Scholar] [CrossRef]
- Du, J.; Yin, K.; Lacasse, S. Displacement prediction in colluvial landslides, three Gorges reservoir, China. Landslides 2013, 10, 203–218. [Google Scholar] [CrossRef]
- Guo, T.; He, W.; Jiang, Z.; Chu, X.; Reza, M.; Li, Z. An improved LSSVM model for intelligent prediction of the daily water level. Energies 2019, 12, 112. [Google Scholar] [CrossRef]
- Chen, H.; Zeng, Z. Deformation prediction of landslide based on improved back-propagation neural network. Cogn. Comput. 2013, 5, 56–62. [Google Scholar] [CrossRef]
- Chen, H.; Zeng, Z.; Tang, H. Landslide deformation prediction based on recurrent neural network. Neural Process. Lett. 2015, 41, 169–178. [Google Scholar] [CrossRef]
- Du, S.; Zhang, J.; Li, J.; Su, Q.; Zhu, W.; Chen, Y. The deformation prediction of mine slope surface using PSO-SVM model. J. Electr. Eng. 2013, 11, 7182–7189. [Google Scholar] [CrossRef]
- He, X.; Hua, X.; He, X. Weighted multi-point grey model and its application to high rock slope deformation forecast. Rock Soil Mech. 2007, 28, 1187–1191. [Google Scholar]
- Liu, C.; Jiang, Z.; Han, X.; Zhou, W. Slope displacement prediction using sequential intelligent computing algorithms. Measurement 2019, 134, 634–648. [Google Scholar] [CrossRef]
- Hu, B.; Su, G.; Jiang, J.; Sheng, J.; Li, J. Uncertain prediction for slope displacement time-series using Gaussian process machine learning. IEEE Access 2019, in press. [Google Scholar] [CrossRef]
- Du, S.; Zhang, J.; Deng, Z.; Li, J. A novel deformation prediction model for mine slope surface using meteorological factors based on kernel extreme learning machine. Int. J. Eng. Res. Afr. 2014, 12, 15. [Google Scholar] [CrossRef]
- Liu, K.; Wei, B.; Liu, B. Analysis model of slope deformation time series based on the genetic-adaptive neuron-fuzzy inference system. J. Beijing Jiaotong Univ. 2012, 36, 56–62. [Google Scholar]
- Li, Z.; Goebel, K.; Wu, D. Degradation modeling and remaining useful life prediction of aircraft engines using ensemble learning. J. Eng. Gas Turbines Power-Trans. ASME 2019, 141, 041008. [Google Scholar] [CrossRef]
- Li, Z.; Wu, D.; Hu, C.; Terpenny, J. An ensemble learning-based prognostic approach with degradation-dependent weights for remaining useful life prediction. Reliab. Eng. Syst. Saf. 2019, 184, 110–122. [Google Scholar] [CrossRef]
- Tipping, M.E. Sparse bayesian learning and the relevance vector machine. J. Mach. Learn. Res. 2001, 1, 211–244. [Google Scholar]
- Jang, J. ANFIS: Adaptive-network-based fuzzy inference system. IEEE Trans. Syst. Man Cybern. Syst. 1993, 23, 665–685. [Google Scholar] [CrossRef]
- Čerňanský, M.; Makula, M.; Beňušková, Ľ. Organization of the state space of a simple recurrent network before and after training on recursive linguistic structures. Neural Netw. 2007, 20, 236–244. [Google Scholar] [CrossRef]
- Shao, Z.; Wang, D.; Wang, Y.; Zhong, X.; Tang, X.; Hu, X. Controlling coal fires using the three-phase foam and water mist techniques in the Anjialing Open Pit Mine, China. Nat. Hazards 2015, 75, 1833–1852. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input: | Slope Deformation Datasets |
|---|---|
| 1. | Model training: Calculate the optimal weight vector for member algorithms |
| 1.1 | Select appropriate sensory measurements from the ground-based interferometric radar (GB-SAR) |
| 1.2 | Train each of the member algorithms to build J member prediction models |
| 1.3 | Perform model validation to obtain the predicted deformation of each member model |
| 1.4 | Compute the optimal weight vector using nonlinear optimization |
| 2. | Model testing: Perform predictions using ensemble learning |
| 2.1 | Predict the slop deformation of the online testing unit using each base learner |
| 2.2 | Carry out ensemble prognostics using the optimal weight vector |
| Output: | Predicted deformation amount |
| Prediction Model | Inputs | Outputs |
|---|---|---|
| BPNN | 12 parameters from the geographical, climatic, and hydrographic aspects | Deformation |
| SVM | ||
| RNN | ||
| ANFIS | ||
| RVM | ||
| Ensemble |
| Learner | Parameter |
|---|---|
| BPNN | Number of hidden neurons is 20 |
| SVM | Gaussian kennel with 0.5 kennel width |
| RNN | Number of hidden notes is 8 |
| ANFIS | Number of Fuzzy rules is 10 |
| RVM | Prior variance σ = 0.1 |
| Learner | Optimal Weights | Validation Results (RMSE) | Testing Results (RMSE) |
|---|---|---|---|
| BPNN | 0 | 4.42 mm | 4.58 mm |
| SVM | 0.01 | 3.93 mm | 3.87 mm |
| RNN | 0.35 | 2.79 mm | 3.00 mm |
| ANFIS | 0.12 | 3.26 mm | 3.16 mm |
| RVM | 0.52 | 2.65 mm | 2.64 mm |
| Ensemble | 2.01 mm | 2.23 mm |
| Learner | Predicted Deformation (mm) | Absolute Error (mm) | Average Absolute Error |
|---|---|---|---|
| BPNN | [0.69 16.35 10.06 9.87 15.94] | [4.73 10.62 2.53 0.23 2.50] | 4.122 mm |
| SVM | [3.81 2.35 3.99 5.32 8.69] | [1.61 3.38 3.54 4.78 4.75] | 3.612 mm |
| RNN | [5.33 6.51 8.25 10.76 14.08] | [0.09 0.78 0.72 0.66 0.64] | 0.578 mm |
| ANFIS | [6.35 3.42 6.76 8.29 15.92] | [0.93 2.31 0.77 1.81 2.48] | 1.660 mm |
| RVM | [5.22 5.65 7.10 9.82 12.22] | [0.20 0.08 0.43 0.28 1.22] | 0.442 mm |
| Ensemble | [5.38 5.65 7.4300 9.92 13.28] | [0.04 0.08 0.10 0.18 0.16] | 0.112 mm |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, S.; Feng, G.; Wang, J.; Feng, S.; Malekian, R.; Li, Z. A New Machine-Learning Prediction Model for Slope Deformation of an Open-Pit Mine: An Evaluation of Field Data. Energies 2019, 12, 1288. https://doi.org/10.3390/en12071288
Du S, Feng G, Wang J, Feng S, Malekian R, Li Z. A New Machine-Learning Prediction Model for Slope Deformation of an Open-Pit Mine: An Evaluation of Field Data. Energies. 2019; 12(7):1288. https://doi.org/10.3390/en12071288
Chicago/Turabian StyleDu, Sunwen, Guorui Feng, Jianmin Wang, Shizhe Feng, Reza Malekian, and Zhixiong Li. 2019. "A New Machine-Learning Prediction Model for Slope Deformation of an Open-Pit Mine: An Evaluation of Field Data" Energies 12, no. 7: 1288. https://doi.org/10.3390/en12071288
APA StyleDu, S., Feng, G., Wang, J., Feng, S., Malekian, R., & Li, Z. (2019). A New Machine-Learning Prediction Model for Slope Deformation of an Open-Pit Mine: An Evaluation of Field Data. Energies, 12(7), 1288. https://doi.org/10.3390/en12071288