Nature-Inspired MPPT Algorithms for Partially Shaded PV Systems: A Comparative Study

 , ,
, , 
Abstract
:1. Introduction
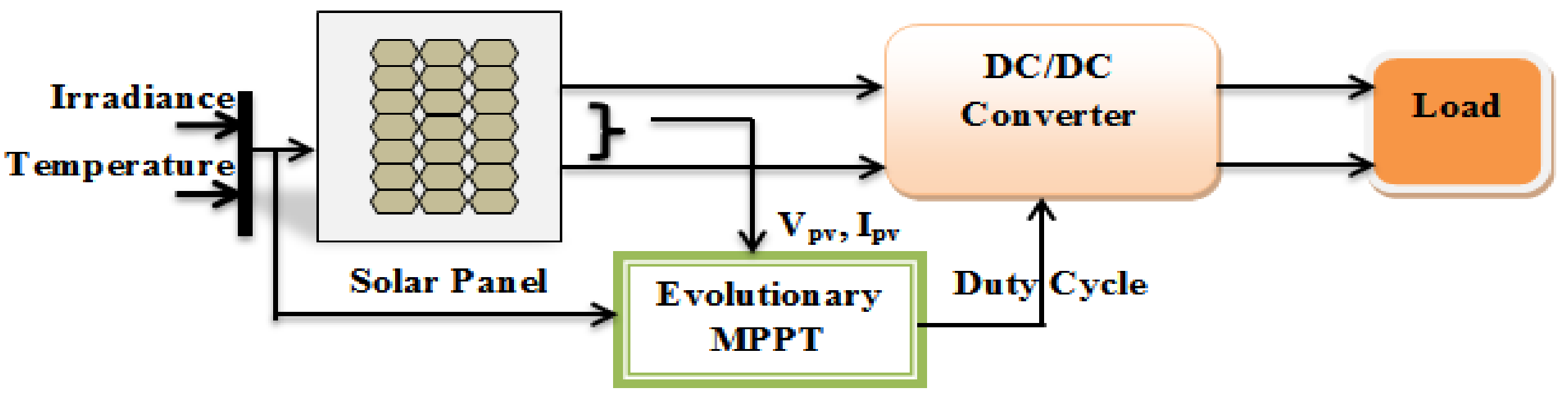
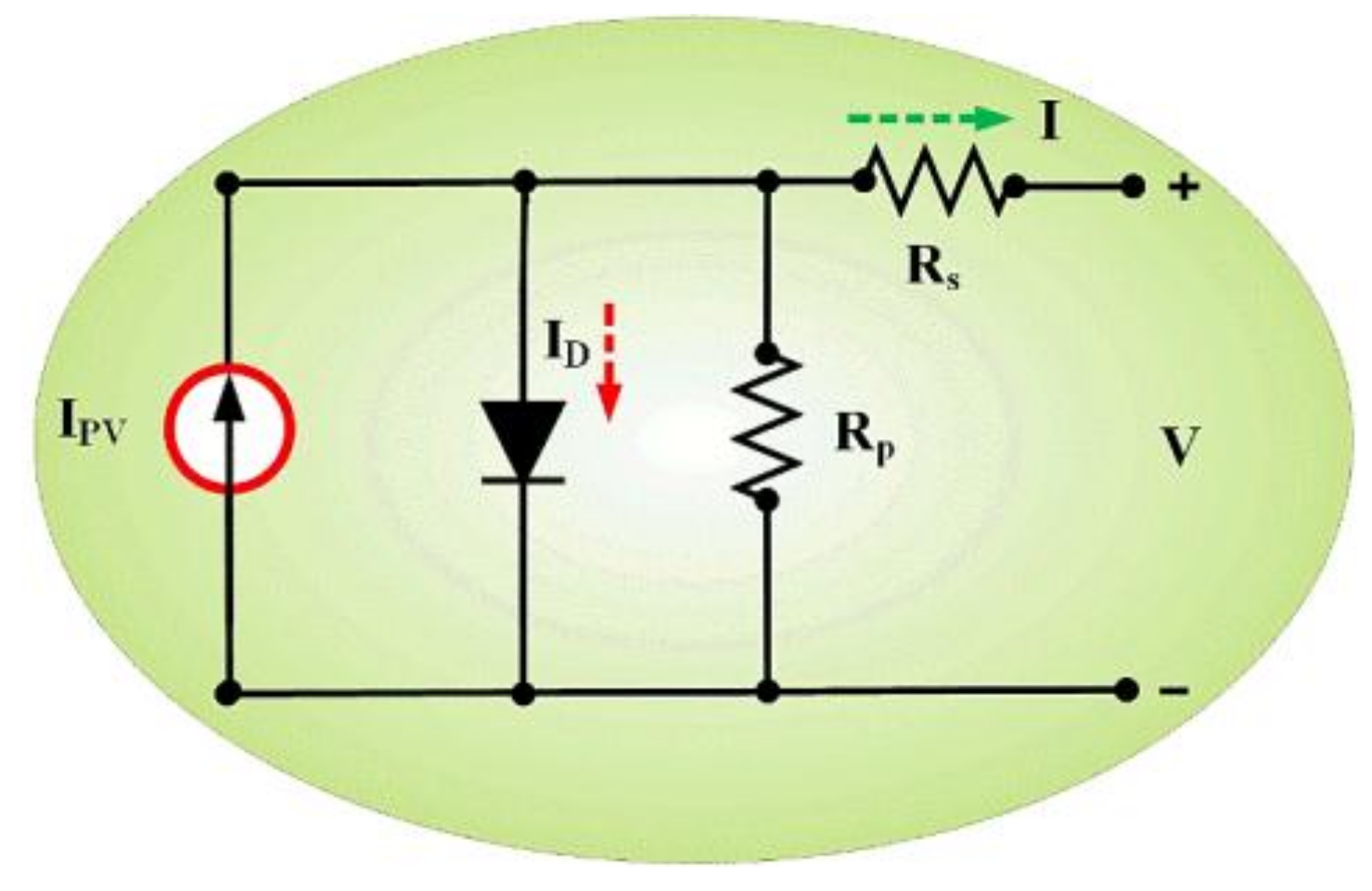
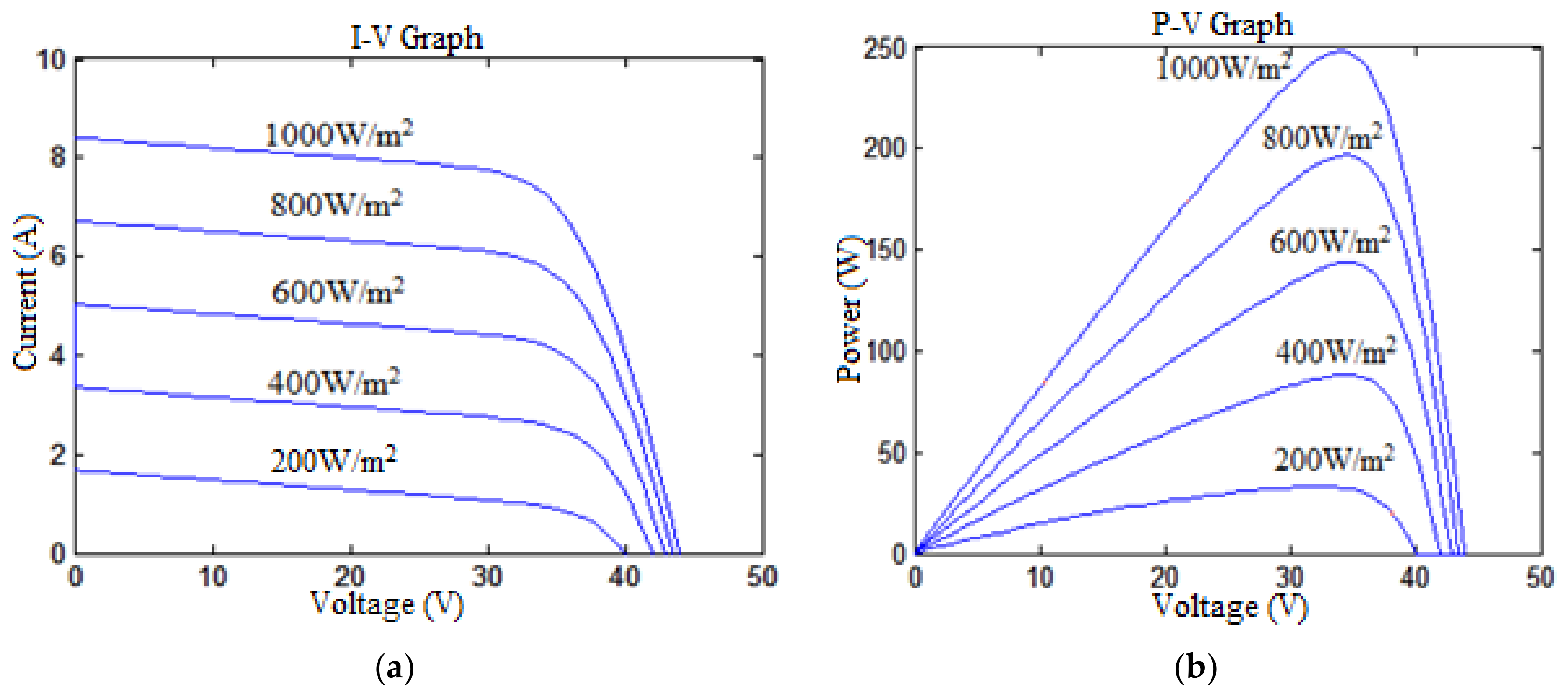
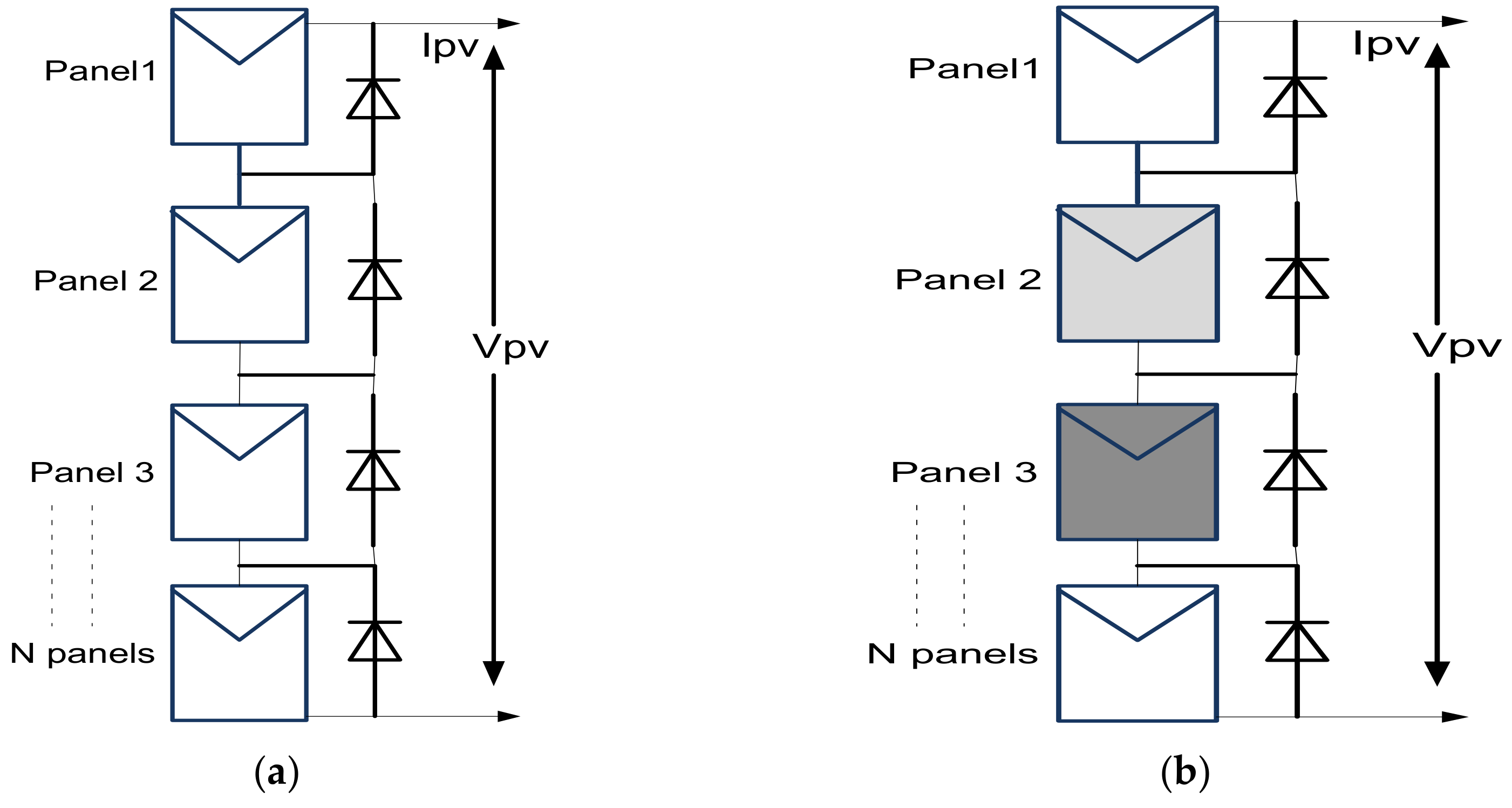
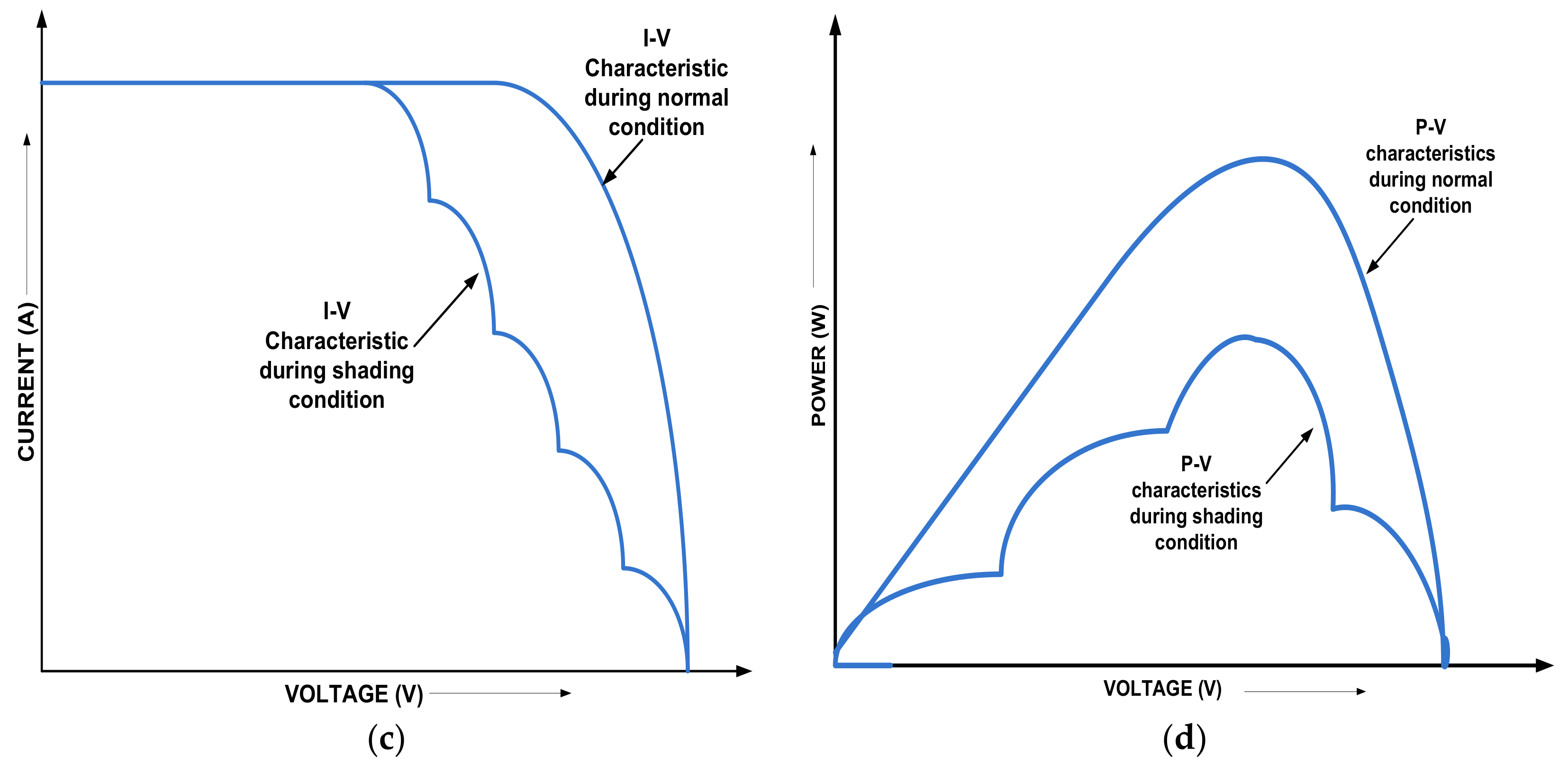
2. PV Modeling and Its Characteristic Curves
3. Intelligent Nature Inspired Algorithms: An Overview
- particle swarm optimization (PSO) algorithm
- differential evolution (DE) algorithm
- ant colony optimization (ACO) algorithm
- artificial bee colony (ABC) optimization algorithm
- bacteria foraging optimization algorithm (BFOA).
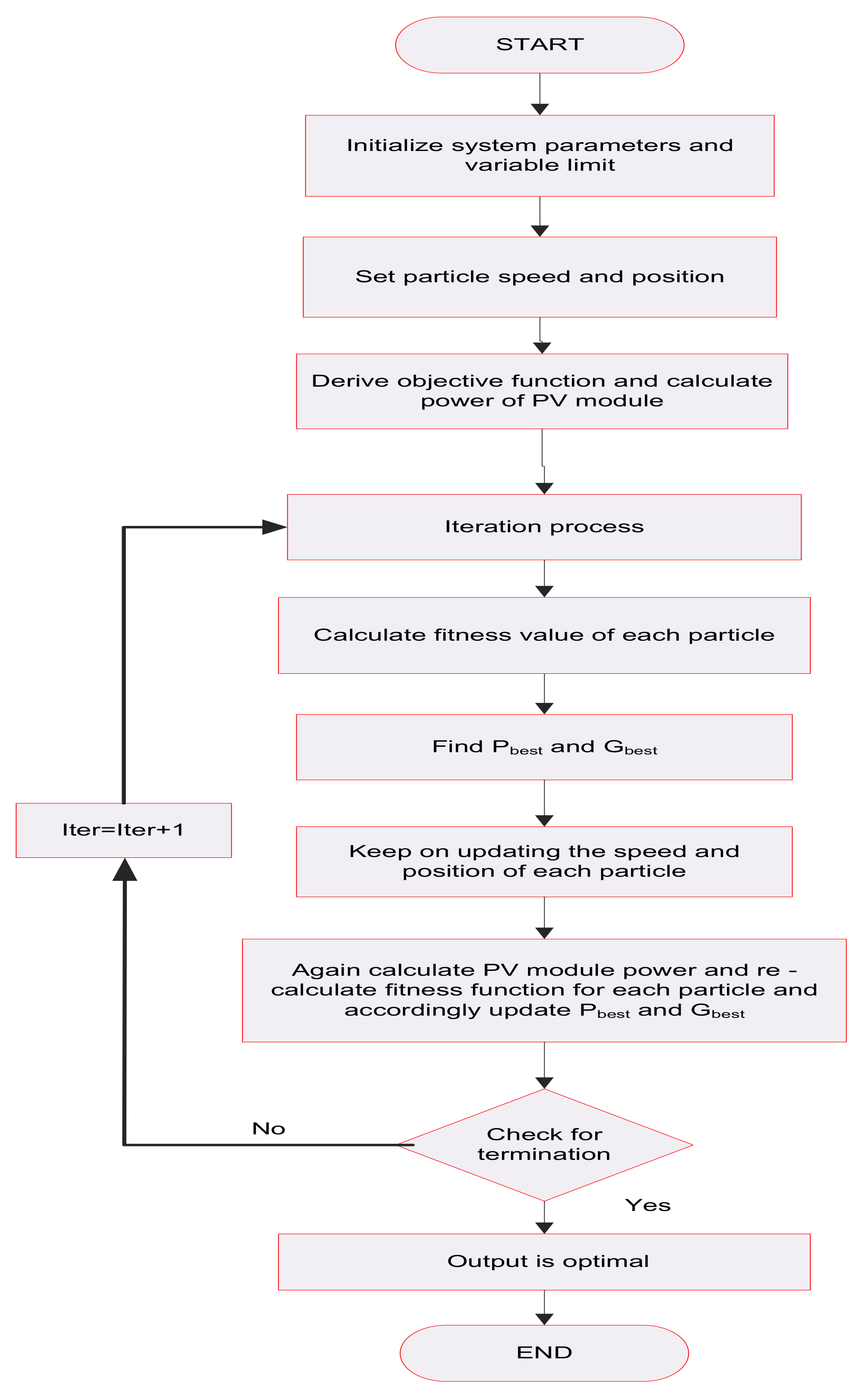
3.1. Particle Swarm Optimization (PSO)
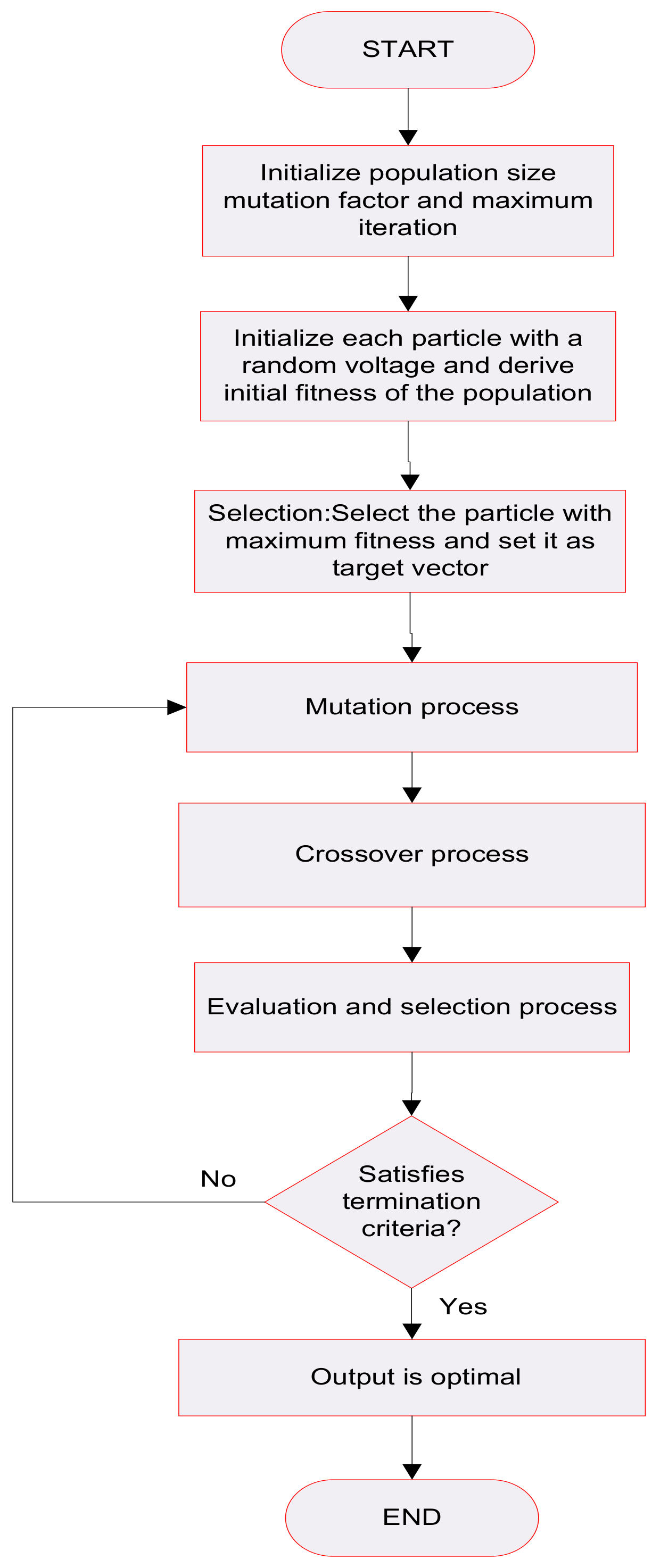
3.2. Differential Evolution (DE)
3.2.1. Initialization
3.2.2. Mutation
3.2.3. Crossover
3.2.4. Selection
3.3. Ant Colony Optimization (ACO)
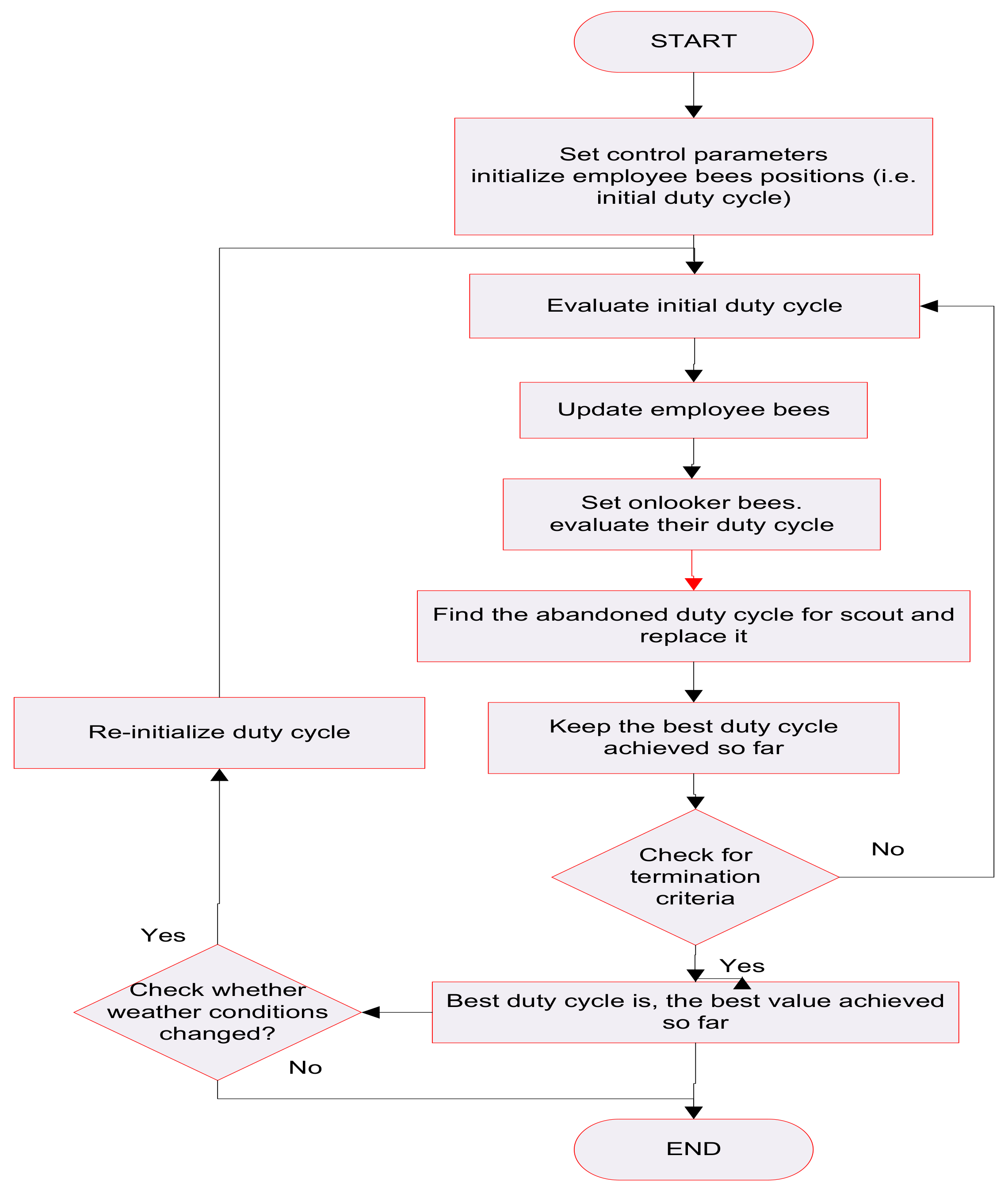
3.4. Artificial Bee Colony (ABC)
ABC as the MPPT
3.5. Bacteria Foraging Optimization Algorithm (BFOA)
3.5.1. Chemotaxis
3.5.2. Swarming
3.5.3. Reproduction
3.5.4. Elimination and Dispersal
4. Critical Evaluation of MPPT Algorithms
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Singh, B.; Shahani, D.T.; Verma, A.K. Neural network controlled grid interfaced solar photovoltaic power generation. IET Power Electron. 2014, 7, 614–626. [Google Scholar] [CrossRef]
- Eltawil, M.A.; Zhao, Z. Grid-connected photovoltaic power systems: Technical and potential problems—A review. Renew. Sustain. Energy Rev. 2010, 14, 112–129. [Google Scholar] [CrossRef]
- Dolara, A.; Faranda, R.; Leva, S. Energy comparison of seven MPPT techniques for PV systems. J. Electromagn. Anal. Appl. 2009, 1, 152. [Google Scholar] [CrossRef]
- Alqarni, M.; Darwish, M.K. Maximum power point tracking for photovoltaic system: modified perturb and observe algorithm. In Proceedings of the 2012 47th International Universities Power Engineering Conference (UPEC), London, UK, 4–7 September 2012. [Google Scholar]
- Ishaque, K.; Salam, Z.; Amjad, M.; Mekhilef, S. An improved particle swarm optimization (PSO)—Based MPPT for PV with reduced steady-state oscillation. IEEE Trans. Power Electron. 2012, 27, 3627–3638. [Google Scholar] [CrossRef]
- Tyagi, V.V.; Rahim, N.A.; Rahim, N.A.; Jeyraj, A.; Selvaraj, L. Progress in solar PV technology: Research and achievement. Renew. Sustain. Energy Rev. 2013, 20, 443–461. [Google Scholar] [CrossRef]
- Kroposki, B.; Sen, P.K.; Malmedal, K. Optimum Sizing and Placement of Distributed and Renewable Energy Sources in Electric Power Distribution Systems. IEEE Trans. Ind. Appl. 2013, 49, 2741–2752. [Google Scholar] [CrossRef]
- Chao, R.M.; Ko, S.H.; Lin, H.K.; Wang, I.K. Evaluation of a Distributed Photovoltaic System in Grid-Connected and Standalone Applications by Different MPPT Algorithms. Energies 2018, 11, 1484. [Google Scholar] [CrossRef]
- Li, H.; Yang, D.; Su, W.; Lü, J.; Yu, X. An overall distribution particle swarm optimization MPPT algorithm for photovoltaic system under partial shading. IEEE Trans. Ind. Electron. 2019, 66, 265–275. [Google Scholar] [CrossRef]
- Celik, A.N.; Acikgoz, N. Modelling and experimental verification of the operating current of mono-crystalline photovoltaic modules using four-and five-parameter models. Appl. Energy 2007, 84, 1–15. [Google Scholar] [CrossRef]
- Esram, T.; Chapman, P.L. Comparison of photovoltaic array maximum power point tracking techniques. IEEE Trans. Energy Convers. 2007, 22, 439–449. [Google Scholar] [CrossRef]
- Belkaid, A.; Colak, U.; Kayisli, K. A comprehensive study of different photovoltaic peak power tracking methods. In Proceedings of the 2017 IEEE 6th International Conference on Renewable Energy Research and Applications (ICRERA), San Diego, CA, USA, 5–8 November 2017; pp. 1073–1079. [Google Scholar]
- Priyadarshi, N.; Sharma, A.K.; Priyam, S. Practical Realization of an Improved Photovoltaic Grid Integration with MPPT. Int. J. Renew. Energy Res. 2017, 7, 1880–1891. [Google Scholar]
- Remy, G.; Bethoux, O.; Marchand, C.; Dogan, H. Review of MPPT Techniques for Photovoltaic Systems; Laboratoire de Génie Electrique de Paris (LGEP)/SPEE-Labs, Université Pierre et Marie Curie P6: Paris, France, 2009. [Google Scholar]
- Jiang, L.L.; Srivatsan, R.; Maskell, D.L. Computational intelligence techniques for maximum power point tracking in PV systems: A review. Renew. Sustain. Energy Rev. 2018, 85, 14–45. [Google Scholar] [CrossRef]
- Sridhar, R.; Jeevananthan, S.; Dash, S.S.; Vishnuram, P. A new maximum power tracking in PV system during partially shaded conditions based on shuffled frog leap algorithm. J. Exp. Theor. Artif. Intell. 2017, 29, 481–493. [Google Scholar] [CrossRef]
- Miyatake, M.; Veerachary, M.; Toriumi, F.; Fujii, N.; Ko, H. Maximum power point tracking of multiple photovoltaic arrays: A PSO approach. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 367–380. [Google Scholar] [CrossRef]
- Chen, L.R.; Tsai, C.H.; Lin, Y.L.; Lai, Y.S. A biological swarm chasing algorithm for tracking the PV maximum power point. IEEE Trans. Energy Convers. 2010, 25, 484–493. [Google Scholar] [CrossRef]
- Kamarzaman, N.A.; Tan, C.W. A comprehensive review of maximum power point tracking algorithms for photovoltaic systems. Renew. Sustain. Energy Rev. 2014, 37, 585–598. [Google Scholar] [CrossRef]
- Villalva, M.G.; Gazoli, J.R.; Ruppert Filho, E. Comprehensive approach to modeling and simulation of photovoltaic arrays. IEEE Trans. Power Electron. 2009, 24, 1198–1208. [Google Scholar] [CrossRef]
- Onat, N. Recent developments in maximum power point tracking technologies for photovoltaic systems. Int. J. Photoenergy 2010, 2010, 245316. [Google Scholar] [CrossRef]
- Karatepe, E.; Hiyama, T. Artificial neural network-polar coordinated fuzzy controller based maximum power point tracking control under partially shaded conditions. IET Renew. Power Gener. 2009, 3, 239–253. [Google Scholar]
- Ramaprabha, R.; Mathur, B.L. Genetic algorithm based maximum power point tracking for partially shaded solar photovoltaic array. Int. J. Res. Rev. Inf. Sci. (IJRRIS) 2012, 2, 161–163. [Google Scholar]
- Liu, Y.H.; Huang, S.C.; Huang, J.W.; Liang, W.C. A particle swarm optimization-based maximum power point tracking algorithm for PV systems operating under partially shaded conditions. IEEE Trans. Energy Convers. 2012, 27, 1027–1035. [Google Scholar] [CrossRef]
- Sundareswaran, K.; Palani, S. Application of a combined particle swarm optimization and perturb and observe method for MPPT in PV systems under partial shading conditions. Renew. Energy 2015, 75, 308–317. [Google Scholar] [CrossRef]
- Koad, R.B.A.; Zobaa, A.F. Comparison between the Conventional Methods and PSO Based MPPT Algorithm for Photovoltaic Systems. Int. J. Electr. Robot. Electron. Commun. Eng. 2014, 8, 673–678. [Google Scholar]
- Li, G.; Jin, Y.; Akram, M.W.; Chen, X.; Ji, J. Application of bio-inspired algorithms in maximum power point tracking for PV systems under partial shading conditions—A review. Renew. Sustain. Energy Rev. 2018, 81, 840–873. [Google Scholar] [CrossRef]
- Chaieb, H.; Sakly, A. A novel MPPT method for photovoltaic application under partial shaded conditions. Sol. Energy 2018, 159, 291–299. [Google Scholar] [CrossRef]
- Mao, M.; Duan, Q.; Zhang, L.; Chen, H.; Hu, B.; Duan, P. Maximum Power Point Tracking for Cascaded PV-Converter Modules Using Two-Stage Particle Swarm Optimization. Sci. Rep. 2017, 7, 9381. [Google Scholar] [CrossRef] [PubMed]
- Dileep, G.; Singh, S.N. An improved particle swarm optimization based maximum power point tracking algorithm for PV system operating under partial shading conditions. Sol. Energy 2017, 158, 1006–1015. [Google Scholar] [CrossRef]
- Shi, J.; Zhang, W.; Zhang, Y.; Xue, F.; Yang, T. MPPT for PV systems based on a dormant PSO algorithm. Electr. Power Syst. Res. 2015, 123, 100–107. [Google Scholar] [CrossRef]
- Gavhane, P.S.; Krishnamurthy, S.; Dixit, R.; Ram, J.P.; Rajasekar, N. EL-PSO based MPPT for Solar PV under Partial Shaded Condition. Energy Procedia 2017, 117, 1047–1053. [Google Scholar] [CrossRef]
- Da Silva, S.A.; Sampaio, L.P.; de Oliveira, F.M.; Durand, F.R. Feed-forward DC-bus control loop applied to a single-phase grid-connected PV system operating with PSO-based MPPT technique and active power-line conditioning. IET Renew. Power Gener. 2016, 11, 183–193. [Google Scholar] [CrossRef]
- Renaudineau, H.; Donatantonio, F.; Fontchastagner, J.; Petrone, G.; Spagnuolo, G.; Martin, J.P.; Pierfederici, S. A PSO-based global MPPT technique for distributed PV power generation. IEEE Trans. Ind. Electron. 2015, 62, 1047–1058. [Google Scholar] [CrossRef]
- De Oliveira, F.M.; da Silva, S.A.; Durand, F.R.; Sampaio, L.P.; Bacon, V.D.; Campanhol, L.B. Grid-tied photovoltaic system based on PSO MPPT technique with active power line conditioning. IET Power Electron. 2016, 9, 1180–1191. [Google Scholar] [CrossRef]
- Storn, R.M.; Price, K.V. Differential evolution-a simple and efficient adaptive scheme for global optimization over continuous spaces. J. Glob. Optim. 1995, 3, 1–15. [Google Scholar]
- Tey, K.S.; Mekhilef, S.; Yang, H.T.; Chuang, M.K. A differential evolution based MPPT method for photovoltaic modules under partial shading conditions. Int. J. Photoenergy 2014, 2014, 945906. [Google Scholar] [CrossRef]
- Taheri, H.; Salam, Z.; Ishaque, K. A novel maximum power point tracking control of photovoltaic system under partial and rapidly fluctuating shadow conditions using differential evolution. In Proceedings of the 2010 IEEE Symposium on Industrial Electronics & Applications (ISIEA), Penang, Malaysia, 3–5 October 2010; pp. 82–87. [Google Scholar]
- Tajuddin, M.F.N.; Ayob, S.M.; Salam, Z.; Saad, M.S. Evolutionary based maximum power point tracking technique using differential evolution algorithm. Energy Build. 2013, 67, 245–252. [Google Scholar] [CrossRef]
- Price, K.V.; Storn, R.M.; Lampinen, J.A. Differential Evolution: A Practical Approach to Global Optimization; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Sheraz, M.; Abido, M.A. An efficient MPPT controller using differential evolution and neural network. In Proceedings of the 2012 IEEE International Conference on Power and Energy (PECon), Kota Kinabalu, Malaysia, 2–5 December 2012; pp. 378–383. [Google Scholar]
- Kumar, N.; Hussain, I.; Singh, B.; Panigrahi, B.K. Rapid MPPT for uniformly and partial shaded PV system by using JayaDE algorithm in highly fluctuating atmospheric conditions. IEEE Trans. Ind. Inform. 2017, 13, 2406–2416. [Google Scholar] [CrossRef]
- Neri, F.; Tirronen, V. Recent advances in differential evolution: A survey and experimental analysis. Artif. Intell. Rev. 2010, 33, 61–106. [Google Scholar] [CrossRef]
- Das, S.; Suganthan, P.N. Differential evolution: A survey of the state-of-the-art. IEEE Trans. Evol. Comput. 2011, 15, 4–31. [Google Scholar] [CrossRef]
- Epitropakis, M.G.; Tasoulis, D.K.; Pavlidis, N.G.; Plagianakos, V.P.; Vrahatis, M.N. Enhancing differential evolution utilizing proximity-based mutation operators. IEEE Trans. Evol. Comput. 2011, 15, 99–119. [Google Scholar] [CrossRef]
- Ishaque, K.; Salam, Z. An improved modeling method to determine the model parameters of photovoltaic (PV) modules using differential evolution (DE). Sol. Energy 2011, 85, 2349–2359. [Google Scholar] [CrossRef]
- Tajuddin, M.F.; Ayob, S.M.; Salam, Z. Tracking of maximum power point in partial shading condition using differential evolution (DE). In Proceedings of the 2012 IEEE International Conference on Power and Energy (PECon), Kota Kinabalu, Malaysia, 2–5 December 2012; pp. 384–389. [Google Scholar]
- Tey, K.S.; Mekhilef, S.; Seyedmahmoudian, M.; Horan, B.; Oo, A.M.T.; Stojcevski, A. Improved Differential Evolution-based MPPT Algorithm using SEPIC for PV Systems under Partial Shading Conditions and Load Variation. IEEE Trans. Ind. Inform. 2018, 14, 4322–4333. [Google Scholar] [CrossRef]
- Dorigo, M.; Maniezzo, V.; Colorni, A. Ant system: Optimization by a colony of cooperating agents. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 1996, 26, 29–41. [Google Scholar] [CrossRef]
- Sridhar, R.; Jeevananthan, S.; Dash, S.S.; Selvan, N.T. Unified MPPT controller for partially shaded panels in a photovoltaic array. Int. J. Autom. Comput. 2014, 11, 536–542. [Google Scholar] [CrossRef]
- Liu, L.; Dai, Y.; Gao, J. Ant colony optimization algorithm for continuous domains based on position distribution model of ant colony foraging. Sci. World J. 2014, 2014, 428539. [Google Scholar] [CrossRef] [PubMed]
- Jiang, L.L.; Maskell, D.L. A uniform implementation scheme for evolutionary optimization algorithms and the experimental implementation of an ACO based MPPT for PV systems under partial shading. In Proceedings of the 2014 IEEE Symposium on Computational Intelligence Applications in Smart Grid (CIASG), Orlando, FL, USA, 9–12 December 2014. [Google Scholar]
- Huang, S.-J. Enhancement of hydroelectric generation scheduling using ant colony system based optimization approaches. IEEE Trans. Energy Convers. 2011, 16, 296–301. [Google Scholar] [CrossRef]
- El-Ela, A.A.; Kinawy, A.M.; El-Sehiemy, R.A.; Mouwafi, M.T. Optimal reactive power dispatch using ant colony optimization algorithm. Electr. Eng. 2011, 93, 103–116. [Google Scholar] [CrossRef]
- Mantilla-Gaviria, I.A.; Díaz-Morcillo, A.; Balbastre-Tejedor, J.V. An ant colony optimization algorithm for microwave corrugated filters design. J. Comput. Eng. 2013, 2013, 942126. [Google Scholar] [CrossRef]
- Jiang, L.L.; Maskell, D.L.; Patra, J.C. A novel ant colony optimization-based maximum power point tracking for photovoltaic systems under partially shaded conditions. Energy Build. 2013, 58, 227–236. [Google Scholar] [CrossRef]
- Titri, S.; Larbes, C.; Toumi, K.Y.; Benatchba, K. A new MPPT controller based on the Ant colony optimization algorithm for Photovoltaic systems under partial shading conditions. Appl. Soft Comput. 2017, 58, 465–479. [Google Scholar] [CrossRef]
- Nivetha, V.; Gowri, G.V. Maximum power point tracking of photovoltaic system using ant colony and particle swam optimization algorithms. In Proceedings of the 2015 2nd International Conference on Electronics and Communication Systems (ICECS), Coimbatore, India, 26–27 February 2015; pp. 948–952. [Google Scholar]
- Sundareswaran, K.; Vigneshkumar, V.; Sankar, P.; Simon, S.P.; Nayak, P.S.R.; Palani, S. Development of an improved P&O algorithm assisted through a colony of foraging ants for MPPT in PV system. IEEE Trans. Ind. Inform. 2016, 12, 187–200. [Google Scholar]
- Karaboga, D. An Idea Based on Honey Bee Swarm for Numerical Optimization [Technical Report-TR06]; Erciyes University, Engineering Faculty, Computer Engineering Department: Kayseri, Turkey, 2005. [Google Scholar]
- Tereshko, V. Reaction-diffusion model of a honeybee colony’s foraging behavior. In Proceedings of the 6th International Conference on Parallel Problem Solving from Nature; Springer: London, UK, 2000; pp. 807–816. [Google Scholar]
- Tereshko, V.; Lee, T. How information mapping patterns determine foraging behaviour of a honeybee colony. Open Syst. Inf. Dyn. 2002, 9, 181–193. [Google Scholar] [CrossRef]
- Tereshko, V.; Loengarov, A. Collective decision-making in honeybee foraging dynamics. Comput. Inf. Syst. J. 2005, 9, 1–7. [Google Scholar]
- Hassan, S.; Abdelmajid, B.; Mourad, Z.; Aicha, S.; Abdenaceur, B. An Advanced MPPT Based on Artificial Bee Colony Algorithm for MPPT Photovoltaic System under Partial Shading Condition. Int. J. Power Electron. Drive Syst. 2017, 8, 647–653. [Google Scholar] [CrossRef]
- Karaboga, D.; Basturk, B. On the performance of artificial bee colony (ABC) algorithm. Appl. Soft Comput. 2008, 8, 687–697. [Google Scholar] [CrossRef]
- Singh, A. An artificial bee colony algorithm for the leaf-constrained minimum spanning tree problem. Appl. Soft Comput. 2009, 9, 625–631. [Google Scholar] [CrossRef]
- Karaboga, D.; Akay, B. A comparative study of artificial bee colony algorithm. Appl. Math. Comput. 2009, 214, 108–132. [Google Scholar] [CrossRef]
- Bilal, B. Implementation of artificial bee colony algorithm on maximum power point tracking for PV modules. In Proceedings of the 2013 8th International Symposium on Advanced Topics in Electrical Engineering (ATEE), Bucharest, Romania, 23–25 May 2013. [Google Scholar]
- Benyoucef, A.S.; Chouder, A.; Kara, K.; Silvestre, S.; Ait Sahed, O. Artificial bee colony based algorithm for maximum power point tracking (MPPT) for PV systems operating under partial shaded conditions. Appl. Soft Comput. 2015, 32, 38–48. [Google Scholar] [CrossRef]
- Sundareswaran, K.; Sankar, P.; Nayak, P.S.; Simon, S.P.; Palani, S. Enhanced energy output from a PV system under partial shaded conditions through artificial bee colony. IEEE Trans. Sustain. Energy 2015, 6, 198–209. [Google Scholar] [CrossRef]
- Sawant, P.T.; Lbhattar, P.C.; Bhattar, C.L. Enhancement of PV system based on artificial bee colony algorithm under dynamic conditions. In Proceedings of the IEEE International Conference on Recent Trends in Electronics, Information & Communication Technology (RTEICT), Bangalore, India, 20–21 May 2016; pp. 1251–1255. [Google Scholar]
- Fathy, A. Reliable and efficient approach for mitigating the shading effect on photovoltaic module based on Modified Artificial Bee Colony algorithm. Renew. Energy 2015, 81, 78–88. [Google Scholar] [CrossRef]
- Mishra, S. A hybrid least square-fuzzy bacterial foraging strategy for harmonic estimation. IEEE Trans. Evol. Comput. 2005, 9, 61–73. [Google Scholar] [CrossRef]
- Passino, K.M. Biomimicry of bacterial foraging for distributed optimization and control. IEEE Control Syst. 2002, 22, 52–67. [Google Scholar]
- Biswas, A.; Dasgupta, S.; Das, S.; Abraham, A. A synergy of differential evolution and bacterial foraging optimization for global optimization. Neural Netw. World 2007, 17, 607. [Google Scholar]
- Dasgupta, S.; Das, S.; Abraham, A.; Biswas, A. Adaptive computational chemotaxis in bacterial foraging optimization: An analysis. IEEE Trans. Evol. Comput. 2009, 13, 919–941. [Google Scholar] [CrossRef]
- Gholami-Boroujeny, S.; Eshghi, M. Non-linear active noise cancellation using a bacterial foraging optimisation algorithm. IET Signal Process. 2012, 6, 364–373. [Google Scholar] [CrossRef]
- Kumar, A.; Gupta, N.; Gupta, V. A synchronization of PV source by using bacterial foraging optimization based PI controller to reduce day-time grid dependency. In Proceedings of the 2017 IEEE International Conference on Intelligent Techniques in Control, Optimization and Signal Processing (INCOS), Srivilliputhur, India, 23–25 March 2017. [Google Scholar]
- Awadallah, M.A.; Venkatesh, B. Bacterial foraging algorithm guided by particle swarm optimization for parameter identification of photovoltaic modules. Can. J. Electr. Comput. Eng. 2016, 39, 150–157. [Google Scholar] [CrossRef]
- Dabra, V.; Paliwal, K.K.; Sharma, P.; Kumar, N. Optimization of photovoltaic power system: A comparative study. Prot. Control Mod. Power Syst. 2017, 2, 3. [Google Scholar] [CrossRef]
- Subudhi, B.; Pradhan, R. Bacterial Foraging Optimization Approach to Parameter Extraction of a Photovoltaic Module. IEEE Trans. Sustain. Energy 2018, 9, 381–389. [Google Scholar] [CrossRef]
- Liu, J.; Li, J.; Wu, J.; Zhou, W. Global MPPT algorithm with coordinated control of PSO and INC for rooftop PV array. J. Eng. 2017, 2017, 778–782. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sl. No | Algorithm Name | Advantage | Disadvantage |
|---|---|---|---|
| 1 | PSO |
|
|
| 2 | ACO |
|
|
| 3 | ABC |
|
|
| 4 | DE |
|
|
| 5 | BFOA |
|
|
| Ref. No | Method Used | Year of Publication | System Under Consideration | Observed Condition | Converter Used | Advantages |
|---|---|---|---|---|---|---|
| [25] | PSO combined with P&O | 2015 | Stand alone | PSC | dc–dc |
|
| [31] | Dormant PSO and INC | 2015 | Stand alone | PSC | dc–dc |
|
| [35] | PSO | 2015 | Grid-Tied | PSC | dc–dc |
|
| [32] | Enhanced Leader PSO (EL-PSO) | 2017 | Stand alone | PSC | dc–dc |
|
| [82] | PSO and INC | 2017 | Rooftop PV | PSC | dc–dc |
|
| [26] | Combination of HL and SAPSO (HSAPSO) | 2018 | Stand alone | PSC | dc–dc |
|
| [38] | DE | 2010 | Stand alone | PSC | dc–dc boost converter |
|
| [47] | DE | 2012 | Stand alone | PSC | dc–dc boost converter |
|
| [37] | DE with modified mutation direction | 2014 | Stand alone | PSC | dc–dc |
|
| [48] | Improved DE | 2018 | Stand alone | PSC with varying load condition | dc–dc sepic converter |
|
| [59] | Improved ACO based P&O | 2016 | Stand alone | PSC | dc–dc |
|
| [50] | ACO | 2016 | Stand alone | PSC | dc–dc |
|
| [56] | ACO | 2013 | Stand alone | PSC | dc–dc |
|
| [57] | ACO-New Pheromone Update Strategy (ACO-NPU) | 2017 | Stand alone | PSC | dc–dc |
|
| [69] | ABC | 2015 | Stand alone | PSC | dc–dc |
|
| [70] | ABC | 2015 | Stand alone | PSC | dc–dc |
|
| [72] | MABC | 2015 | Stand alone | PSC | dc–dc |
|
| [78] | BFOA tuned PI | 2016 | Grid-Tied | Varying load conditions | - |
|
| [80] | BPSO Fuzzy P&O | 2017 | Stand alone | - | dc–dc |
|
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pathy, S.; Subramani, C.; Sridhar, R.; Thamizh Thentral, T.M.; Padmanaban, S. Nature-Inspired MPPT Algorithms for Partially Shaded PV Systems: A Comparative Study. Energies 2019, 12, 1451. https://doi.org/10.3390/en12081451
Pathy S, Subramani C, Sridhar R, Thamizh Thentral TM, Padmanaban S. Nature-Inspired MPPT Algorithms for Partially Shaded PV Systems: A Comparative Study. Energies. 2019; 12(8):1451. https://doi.org/10.3390/en12081451
Chicago/Turabian StylePathy, Somashree, C. Subramani, R. Sridhar, T. M. Thamizh Thentral, and Sanjeevikumar Padmanaban. 2019. "Nature-Inspired MPPT Algorithms for Partially Shaded PV Systems: A Comparative Study" Energies 12, no. 8: 1451. https://doi.org/10.3390/en12081451
APA StylePathy, S., Subramani, C., Sridhar, R., Thamizh Thentral, T. M., & Padmanaban, S. (2019). Nature-Inspired MPPT Algorithms for Partially Shaded PV Systems: A Comparative Study. Energies, 12(8), 1451. https://doi.org/10.3390/en12081451