2.1. General Survey of Passenger Car Use in France
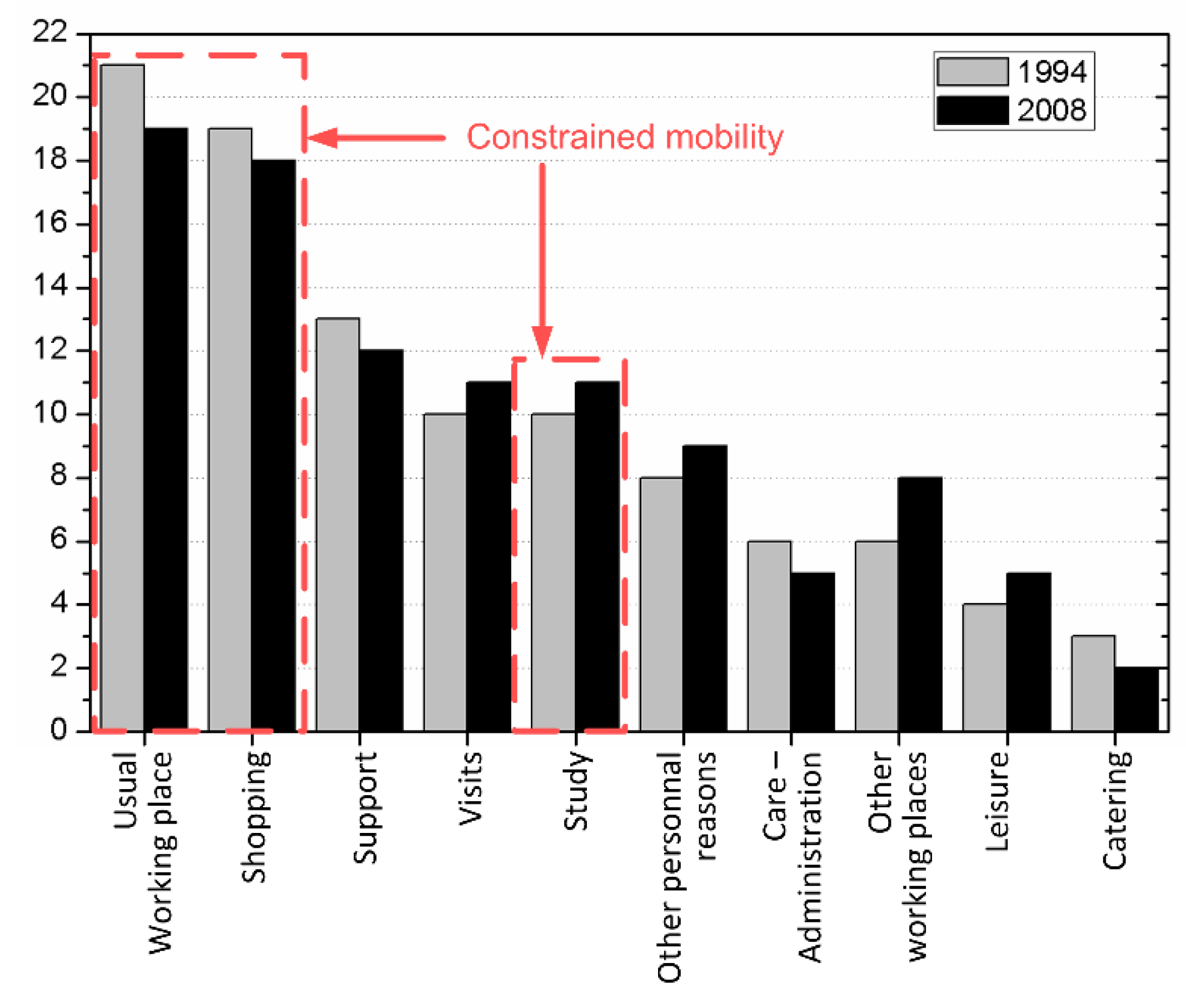
Creating the optimal control strategy for a PHEV first requires one to confirm that the mobility is mainly motivated by habits and constraints. According to previous surveys in France in 1994 and 2008 [
27], more than 50% of trips are constrained by the needs to go working, studying or shopping (
Figure 1). Such a stable distribution suggests that it could be possible to recognize and predict the trips, including destination and itinerary, during working days.
Furthermore, on a daily basis, the average distance travelled is below 30 km (
Table 1), which is within the electric range of a PHEV. These values are averaged over numerous drivers and do not take into account driver behavior (speed profile and acceleration). Hence, it does not reflect the dependency on driving style, road load and the car’s characteristics (power, weight, etc.). As previously mentioned by many authors [
7,
28,
29], these parameters have a strong impact on the power demand and affect energy consumption. Therefore, they have to be considered for the energy management in order to reduce fuel consumption. Creating artificial realistic speed cycles is possible due to modeling [
30]. Moreover, studying the use of vehicles under real driving conditions allows identifying whether a reduced number of trips are frequently reproduced. Thus, in the following we performed an identification of frequent trips, their associated speed profiles and a study of the influence of the driver behavior. The results from this mobility study are presented in the next subsection.
The mobility survey presented in this study first aimed at comparing the previous statistics for France with the statistics in the rural context of the Nièvre department in France. The goal was to record, due to an autonomous acquisition system, real driving cycles and recognize frequent trips.
2.2. Design of the Experimental Study
In order to get statistical results in agreement with the previous census from the INSEE (Institut National de la Statistique et des Etudes Economiques) [
31] in 2008, a representative panel, of 40 people, representing the working population in Nièvre has been defined to fulfill the criterion based on the quota method (age and sex). This is a required condition to obtain significant results. The detailed composition of the panel is presented in
Table 2 and included 47% of women and 53% of men. The age distribution was nearly spread evenly between 20 and 60. To take into account the amount of working people older than 60 (French legal retirement age is 62), only one driver represented this age group. Each volunteer received a fully autonomous acquisition system fixed in the car during one month. Overall, the mobility study was performed during 4 months.
Arduino systems were used to develop ten identical on-board data acquisition systems (
Table 3). These autonomous systems works without any action from the driver once placed inside the vehicle, usually below the driver’s seat. Thus, the driver cannot see the acquisition system while driving and this reduces any potential bias due to a change of driving style. Each acquisition device includes a 9 axis inertial unit, a GPS and a 32 Go micro SD card for data storage. To avoid any power failure, 18 lithium-ion batteries (BRC 18,650, 3.7 V) ensure a one-month autonomy. The acquired data, recorded during one month at a frequency of 10 Hz, consist of date, time, GPS coordinates, speed and acceleration over 3 axes. Such a frequency corresponds to the frequency previously used in Ericsson’s study [
8]. Greater acquisition frequencies (up to 500 Hz) were tested but they did not increase accuracy but increased the storage capacity needed. Moreover, the agreement between the 10 data acquisition systems and the comparison with a RTK GPS, which has a precision of a few centimeters, was validated on the same trip and showed very good agreement since the maximum difference between the data acquisition systems and the RTK GPS was less than 0.5 m. The energy difference generated over the trip was less than ±3%.
2.3. Results of the Mobility Study
The measurement campaign lasted 4 months and included 40 drivers. Overall, the database includes 2013 trips, which corresponds to 19,000 km (
Table 4). Most trips were performed during week days. On a daily basis, the results presented in this study were in good agreement with a previous broader study performed in French rural areas [
27] (
Table 1). Even if the number of trips was very similar, the average daily distance was increased since the employment area and the housing area were often not close one from another and a motorway crossed the Nièvre. This also explains the increase of the average driving time and the average speed because 61.5% of the drivers used this motorway.
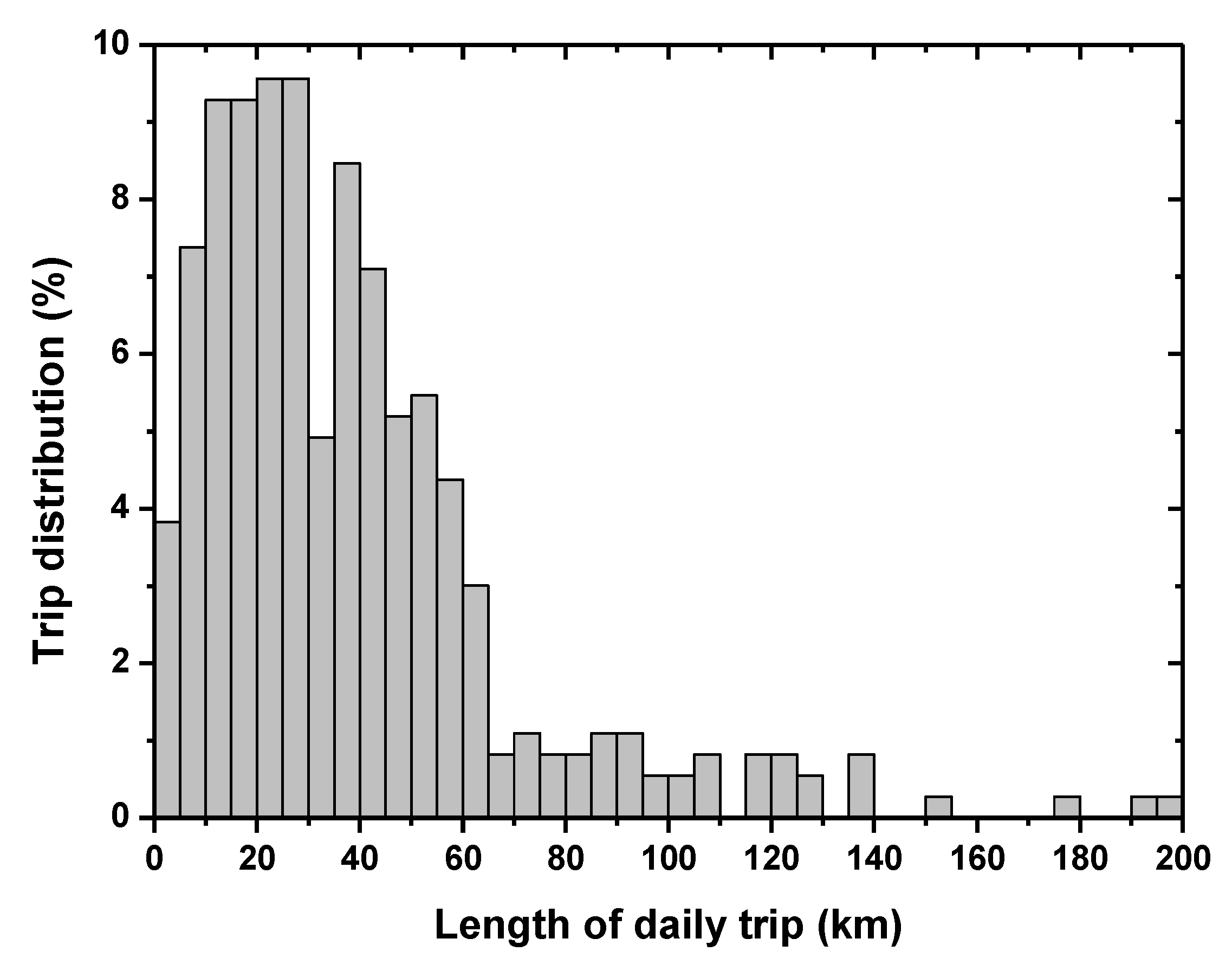
As previously mentioned, it can be noticed (
Figure 2) that, on average, majority of drivers travelled around 30–40 km daily. This is in agreement with the previous study [
27] and such a distance can be covered using the electric energy supply of a PHEV [
6,
9]. However, the distribution is quite large and a significant part of the drivers travelled up to 60 km per day. Finally, since this study also included travel performed during weekends, it can be noticed that longer trips were performed (more than 100 km) and this justified the use of a range extender since the autonomy of the battery was no longer sufficient. During this experimental study, the longest distance performed per day was 441 km.
Since, as shown by
Figure 1, an important part of the trips is constrained, it should be possible to identify usual trips for each driver. This is the first step to optimize the energy use. To this end, a normalized cross-correlation factor, σ (equation 1), was determined for each driver considering daily repetition based on the vehicle position during the trip. In this equation, which compares two trips (f and g), x,y and u,v correspond to the coordinate (x,u: latitude and y,v: longitude) giving the vehicle position for the two respectively compared trips f and g. In order to be compared, the length of trip f has to be greater than the length of trip g.
is the average position of
in the region covered by u and v.
Trips are considered identical if σ is greater than 0.9. This level for the cross-correlation factor is chosen since the car location may differ from one trip to another for example due to different available parking spots, as previously mentioned by Pasaoglu et al. [
32] and two identical trips cannot be perfectly reproducible. Overall, the minimum and maximum distances between the departure or arrival points were respectively 1.5 m and 312 m. A difference was noticed between rural and urban areas since the maximum distance was greater in urban areas (312 m vs. 256 m for departure point and 151 m vs. 50 m for arrival points). This is probably due to the use of public or private parking place. Thus, for all different trips, it is possible to calculate the number of occurrences and evaluate the predictability of the trips.
For each starting point, the predictability is defined as the proportion of identical or similar trips (σ > 0.9) in the total number of trips starting from this point.
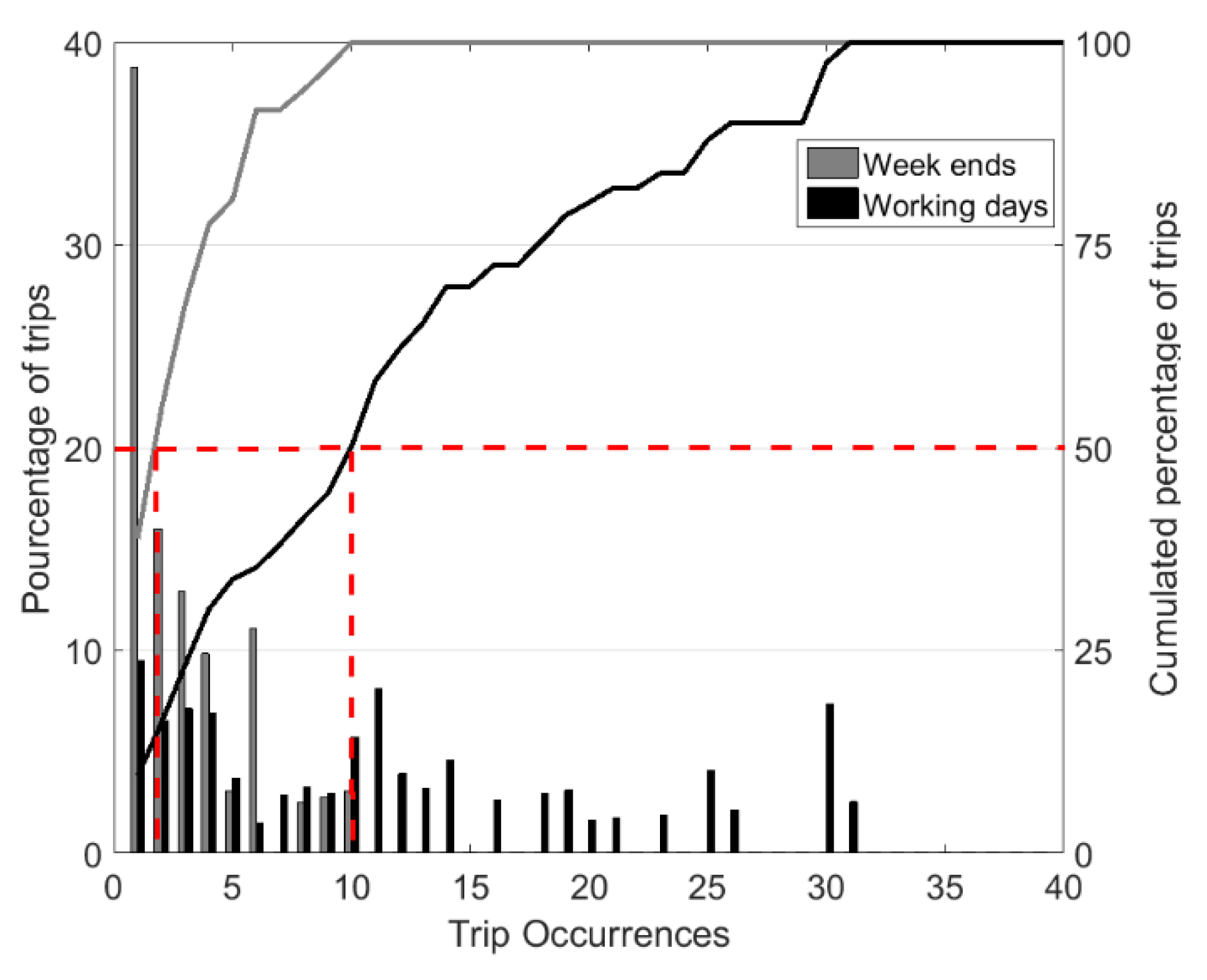
Since mobility is mostly constrained, a distinction is performed between working days and weekends when analyzing the results and identifying repetition of trips. First, the distinction shows that more than 75% (1563 trips out of 2013 trips) of the trips were performed during working days. A further analysis (
Figure 3) revealed that, on working days, a majority of trips shows more than 10 repetition whereas on weekends, 50% of the trips were performed only once. Considering working days, 75% of the trips were repeated more than 5 times. Hence, this allows the identification of similarities, as presented in
Table 4 for a selection of typical drivers and all the database. Overall, the correlation factor was greater than 82% during working days. However, some discrepancies appeared between a driver’s behavior since, for example, the trips performed by the woman between 40 and 50 (
Table 4) were more numerous, had a limited distance and had a higher number of destinations. A deeper analysis shows that most trips were performed in urban areas and the driver may have used different itineraries to avoid traffic jams. This strongly reduced the possibility to identify similar trips and the predictability fell down to 60%.
Due to a reduced number of trips and repetitions during the weekend, prediction was also more difficult and the predictability dropped below 25%.
2.4. Evaluation of the Energy Needs
The measurements obtained during the mobility study were used in order to evaluate the energy and power needs using a static model. This static model calculated, based on vehicle characteristics and the vehicle speed, V
vehicle, the forces that were applied on the vehicle due to Equation (2) where F
drag is the drag force, F
inertia the force needed to accelerate the vehicle due to its weight (no slope) and F
rolling the rolling resistance force. These forces are compensated by the powertrain power, P
powertrain. With regard to the PHEV aspect, in the static model, the vehicle is equipped with a Li-ion battery and the energy management is a simple rule-based strategy (charge depleting mode until SOC = 20% followed by the charge sustaining mode). The internal combustion engine is modeled by the simple equation proposed by Asus et al. [
33]. However, since the study was anonymous and no data were recorded about the vehicle characteristics, three reference vehicles have been chosen: a city car, a sedan and a SUV whose characteristics are presented in
Table 5.
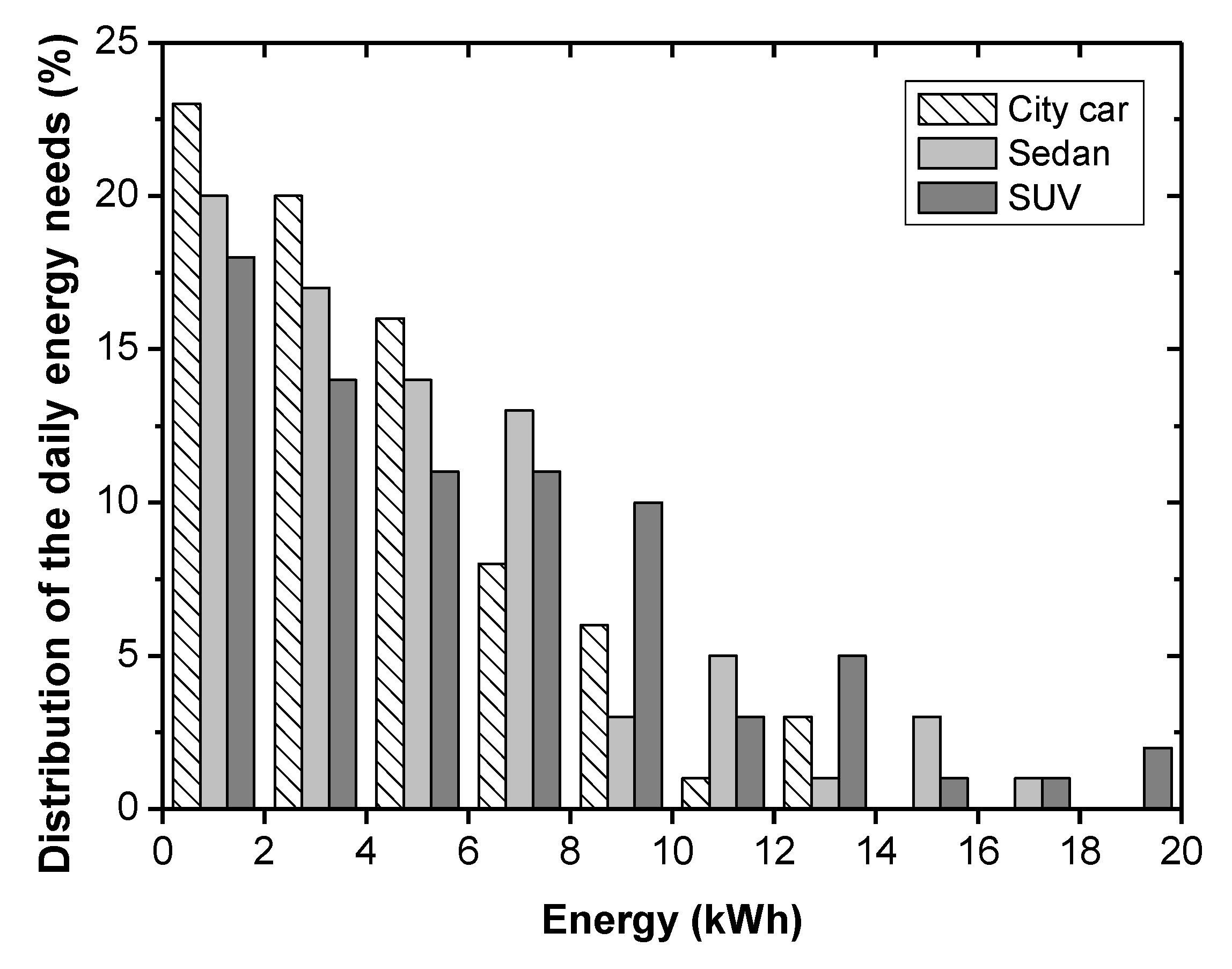
Each vehicle performed all the 2013 recorded speed cycles and 19,000 km. Based on the static model, it is possible to compute the energy needed to perform each cycle and, due to the date information of cycle, to add all the energy needed during one day and calculate the overall daily energy needs.
Figure 4 presents the energy distribution that is required to perform the trips on a daily basis for the three types of vehicles. For a city car, the results show that 95% of the daily energy needs would be covered by a 10 kWh battery, whereas a SUV requires at 14 kWh to cover 95% of the usual daily energy needs.
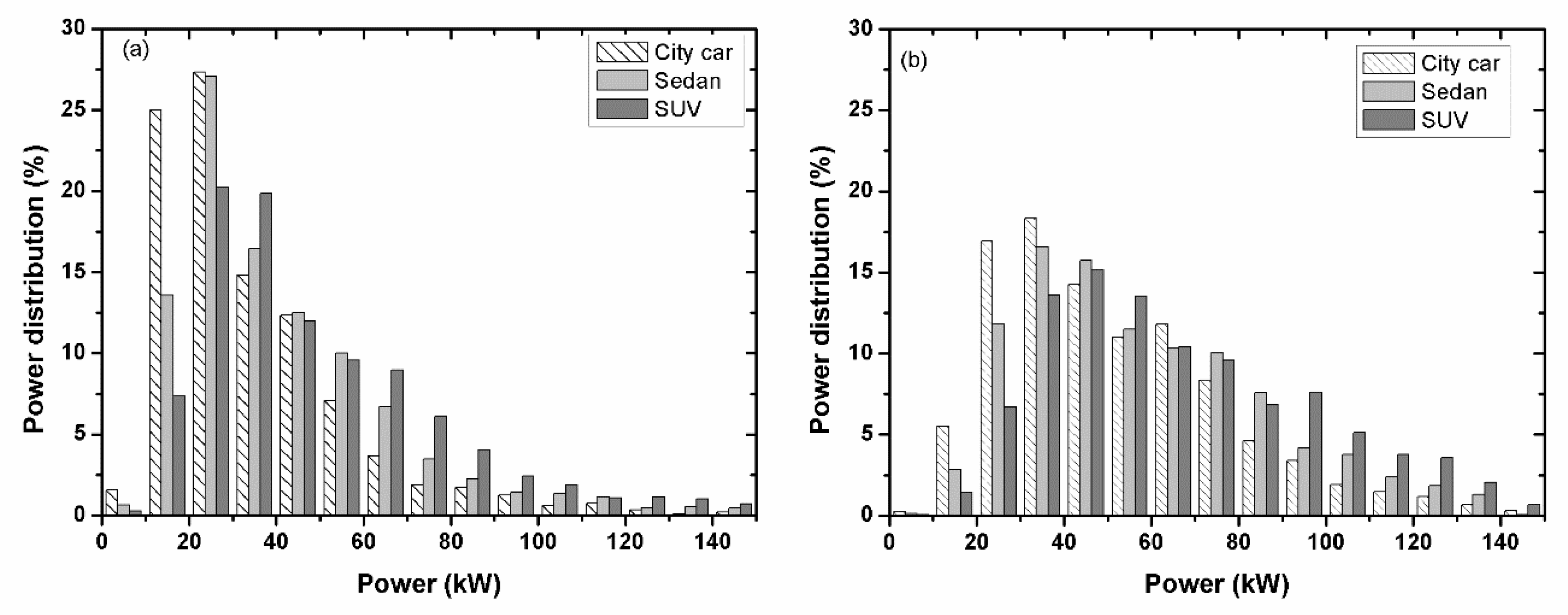
With regard to the power requirements, a 100 kW powertrain would be sufficient to cover 95% of the power needed (
Figure 5a). Of course, these values were impacted by the type of car used and the driver behavior during the experimental campaign. However, it can notice that a 50 kW powertrain covered 83% of the needs for a city car. As expected, the energy and power needs increase with the size of the car due to greater car weight and aerodynamic resistance.
In the case of an electric car equipped with a 40 kWh battery (
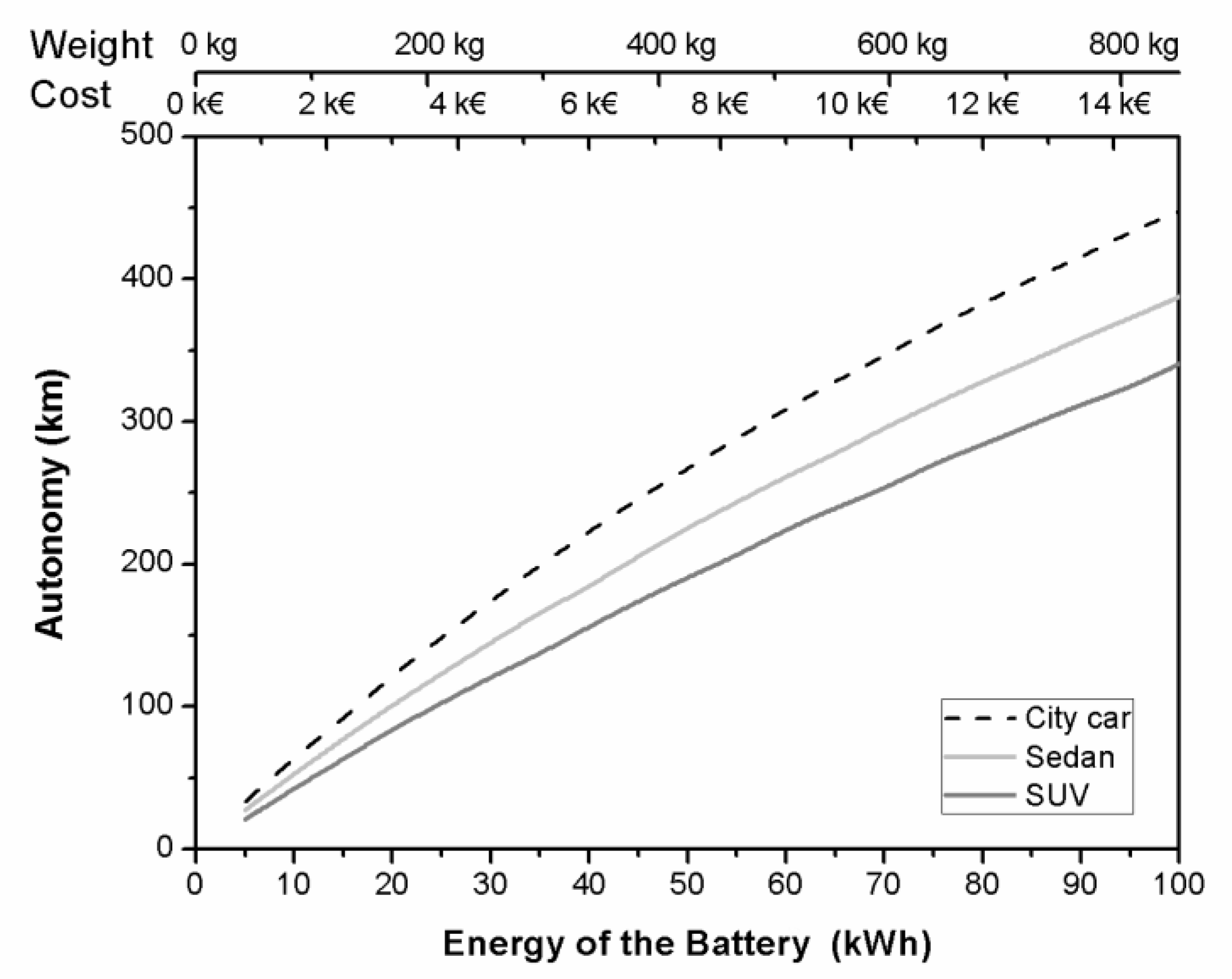
Figure 5b), the power requirements were increased due to the weight of the battery, which was approximately 300 kg. Hence, in order to cover the same proportion, an 80 kW powertrain was needed to cover 86% of the power requirements of a city car and a 120 kW was required to 95% of the needs. However, such a battery electric vehicle would present a greater electric autonomy as evaluated along the WLTC cycle (
Figure 6). The cost of the battery also increased (specific energy 120 Wh/kg, cost: 150 €/kWh). Therefore, in order to reduce the power requirements and the weight, it is more efficient to reduce the size of the battery and use a PHEV with an adaptive energy management.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}