Auto-Tuning Process of State Feedback Speed Controller Applied for Two-Mass System




Abstract
:1. Introduction
2. Mathematical Model of Control System
2.1. Model of the Two-Mass System
2.2. State Feedback Controller
2.3. Analytical Approach
3. Artificial Bee Colony Algorithm
- employed bees phase,
- onlooker bees phase,
- scout phase.
| Algorithm 1 Artificial Bee Colony algorithm. |
|
Objective Function
- overshoot-free response,
- rise and settling times as short as possible,
- chattering-free control signal,
- limited noise amplification.
4. Experimental Results
4.1. Simulation Case
4.2. Dynamic Properties Analysis
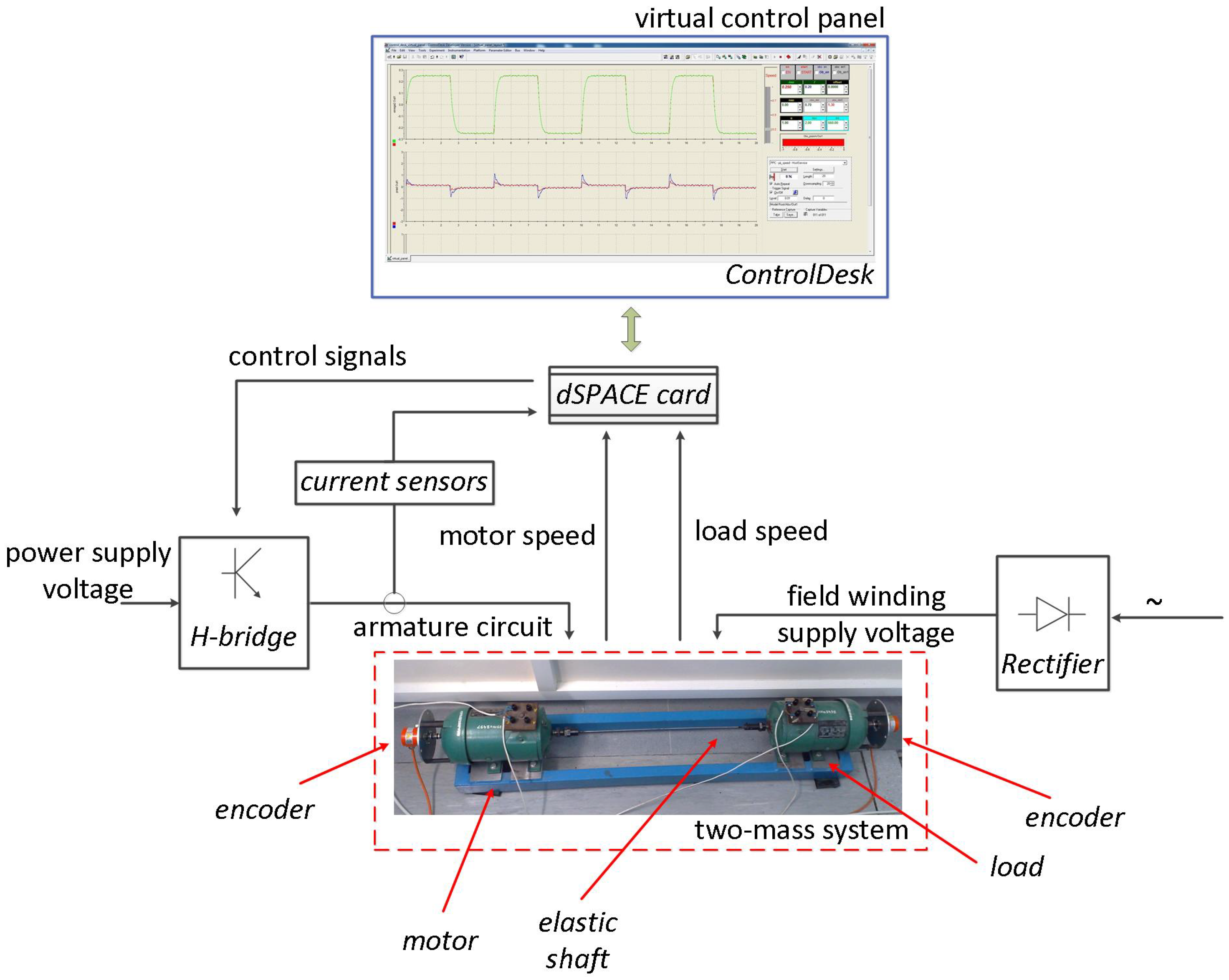
4.3. Experimental Examination
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Szabat, K.; Wróbel, K.; Dróżdz, K.; Janiszewski, D.; Pajchorwski, T.; Wójcik, A. A fuzzy unscented Kalman filter in the adaptive control system of a drive system with a flexible joint. Energies 2020, 13, 2056. [Google Scholar] [CrossRef] [Green Version]
- Kamiński, M.; Orlowska-Kowalska, T. Adaptive neural speed controllers applied for a drive system with an elastic mechanical coupling—A comparative study. Eng. Appl. Artif. Intell. 2015, 45, 152–167. [Google Scholar] [CrossRef]
- Szabat, K.; Orlowska-Kowalska, T. Vibration suppression in a two-mass drive system using PI speed controller and additional feedbacks—Comparative study. IEEE Trans. Ind. Electron. 2007, 54, 1193–1206. [Google Scholar] [CrossRef]
- Ma, C.; Cao, J.; Qiao, Y. Polynomial-method-based design of low-order controllers for two-mass systems. IEEE Trans. Ind. Electron. 2012, 60, 969–978. [Google Scholar] [CrossRef]
- Serkies, P.J.; Szabat, K. Application of the MPC to the position control of the two-mass drive system. IEEE Trans. Ind. Electron. 2012, 60, 3679–3688. [Google Scholar] [CrossRef]
- Saarakkala, S.E.; Hinkkanen, M.; Zenger, K. Speed control of two-mass mechanical loads in electric drives. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 15–20 September 2012; pp. 1246–1253. [Google Scholar]
- Szabat, K.; Orlowska-Kowalska, T. Adaptive control of the electrical drives with the elastic coupling using Kalman filter. Adapt. Control 2009, 4, 205–226. [Google Scholar]
- Tarczewski, T.; Skiwski, M.; Niewiara, L.; Grzesiak, L. High-performance PMSM servo-drive with constrained state feedback position controller. Bull. Pol. Acad. Sci. Tech. Sci. 2018, 66, 49–58. [Google Scholar]
- Roldán-Pérez, J.; García-Cerrada, A.; Rodríguez-Cabero, A.; Zamora-Macho, J.L. Comprehensive Design and Analysis of a State-Feedback Controller for a Dynamic Voltage Restorer. Energies 2018, 11, 1972. [Google Scholar] [CrossRef] [Green Version]
- Bimarta, R.; Tran, T.V.; Kim, K.H. Frequency-adaptive current controller design based on LQR state feedback control for a grid-connected inverter under distorted grid. Energies 2018, 11, 2674. [Google Scholar] [CrossRef] [Green Version]
- Abo-Khalil, A.G.; Alghamdi, A.S.; Eltamaly, A.M.; Al-Saud, M.; RP, P.; Sayed, K.; Bindu, G.; Tlili, I. Design of State Feedback Current Controller for Fast Synchronization of DFIG in Wind Power Generation Systems. Energies 2019, 12, 2427. [Google Scholar] [CrossRef] [Green Version]
- Ogata, K.; Yang, Y. Modern Control Engineering; Prentice Hall: Upper Saddle River, NJ, USA, 2010; Volume 5. [Google Scholar]
- Franklin, G.F.; Powell, J.D.; Workman, M.L. Digital Control of Dynamic Systems; Addison-Wesley: Menlo Park, CA, USA, 1998. [Google Scholar]
- Sun, X.; Hu, C.; Lei, G.; Guo, Y.; Zhu, J. State feedback control for a PM hub motor based on gray wolf optimization algorithm. IEEE Trans. Power Electron. 2019, 35, 1136–1146. [Google Scholar] [CrossRef]
- Tarczewski, T.; Grzesiak, L.M. An application of novel nature-inspired optimization algorithms to auto-tuning state feedback speed controller for PMSM. IEEE Trans. Ind. Appl. 2018, 54, 2913–2925. [Google Scholar] [CrossRef]
- Tarczewski, T.; Niewiara, Ł.J.; Grzesiak, L.M. Application of artificial bee colony algorithm to auto-tuning of state feedback controller for DC-DC power converter. Power Electron. Drives 2016, 1, 83–96. [Google Scholar]
- Szczepanski, R.; Tarczewski, T.; Erwinski, K.; Grzesiak, L.M. Comparison of Constraint-handling Techniques Used in Artificial Bee Colony Algorithm for Auto-Tuning of State Feedback Speed Controller for PMSM. In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2018), Porto, Portugal, 29–31 July 2018; Volume 1, pp. 279–286. [Google Scholar]
- Szczepanski, R.; Tarczewski, T.; Grzesiak, L.M. Parallel computing applied to auto-tuning of state feedback speed controller for PMSM drive. In ITM Web of Conferences; EDP Sciences: Les Ulis, France, 2019; Volume 28, p. 01031. [Google Scholar]
- Simhadri, K.S.; Mohanty, B.; Panda, S.K. Comparative performance analysis of 2DOF state feedback controller for automatic generation control using whale optimization algorithm. Optim. Control Appl. Methods 2019, 40, 24–42. [Google Scholar] [CrossRef]
- Ali, H.I.; Naji, R.M. Optimal and robust tuning of state feedback controller for rotary inverted pendulum. Eng. Technol. J. 2016, 34, 2924–2939. [Google Scholar]
- Kamiński, M. Zastosowanie algorytmu BAT w optymalizacji obliczeń adaptacyjnego regulatora stanu układu dwumasowego. Przegląd Elektrotechniczny 2017, 93, 300–304. [Google Scholar] [CrossRef]
- Franklin, G.F.; Powell, J.D.; Emami-Naeini, A.; Sanjay, H. Feedback Control of Dynamic Systems; Pearson: London, UK, 2015. [Google Scholar]
- Tarczewski, T.; Niewiara, L.; Grzesiak, L. Artificial bee colony based state feedback position controller for PMSM servo-drive—The efficiency analysis. Bull. Pol. Acad. Sci. Tech. Sci. 2020. early access article. [Google Scholar]
- Karaboga, D. An Idea Based on Honey Bee Swarm for Numerical Optimization; Technical Report; Erciyes University: Kayseri, Turkey, 2005. [Google Scholar]
- Karaboga, D.; Akay, B. A comparative study of artificial bee colony algorithm. Appl. Math. Comput. 2009, 214, 108–132. [Google Scholar] [CrossRef]
- Basquel, P.; Burke, R.; Curran, P. Optimal closed-loop transfer functions for non-standard performance indices. In Proceedings of the 2017 28th Irish Signals and Systems Conference (ISSC), Killarney, Ireland, 20–21 June 2017; pp. 1–6. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Mechanical time constant of the motor () | |
| Mechanical time constant of load () | |
| Mechanical time constant of elastic part () |
| Parameter | Value |
|---|---|
| No of optimized parameters (D) | 5 |
| No of colony size () | 20 |
| No of food sources () | |
| Control parameter () | |
| Scout production period () | |
| Modification rate control parameter () | |
| Number of iterations (N) | 100 |
| Lower-bound ÷ Upper-bound () |
| Method | ||||
|---|---|---|---|---|
| ABC | ||||
| calc |
| Parameter | Symbol | ABC | calc |
|---|---|---|---|
| rise time (s) | |||
| settling time (s) | |||
| overshot (%) |
| Parameter | Symbol | ABC | calc |
|---|---|---|---|
| rise time (s) | |||
| settling time (s) | |||
| overshot (%) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Szczepanski, R.; Kaminski, M.; Tarczewski, T. Auto-Tuning Process of State Feedback Speed Controller Applied for Two-Mass System. Energies 2020, 13, 3067. https://doi.org/10.3390/en13123067
Szczepanski R, Kaminski M, Tarczewski T. Auto-Tuning Process of State Feedback Speed Controller Applied for Two-Mass System. Energies. 2020; 13(12):3067. https://doi.org/10.3390/en13123067
Chicago/Turabian StyleSzczepanski, Rafal, Marcin Kaminski, and Tomasz Tarczewski. 2020. "Auto-Tuning Process of State Feedback Speed Controller Applied for Two-Mass System" Energies 13, no. 12: 3067. https://doi.org/10.3390/en13123067
APA StyleSzczepanski, R., Kaminski, M., & Tarczewski, T. (2020). Auto-Tuning Process of State Feedback Speed Controller Applied for Two-Mass System. Energies, 13(12), 3067. https://doi.org/10.3390/en13123067