A Wide-Adjustable Sensorless IPMSM Speed Drive Based on Current Deviation Detection under Space-Vector Modulation




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- a zero voltage vector (ZVV) rotor estimation method is originally proposed to obtain a high-performance sensorless drive system at a zero-speed with full load conditions.
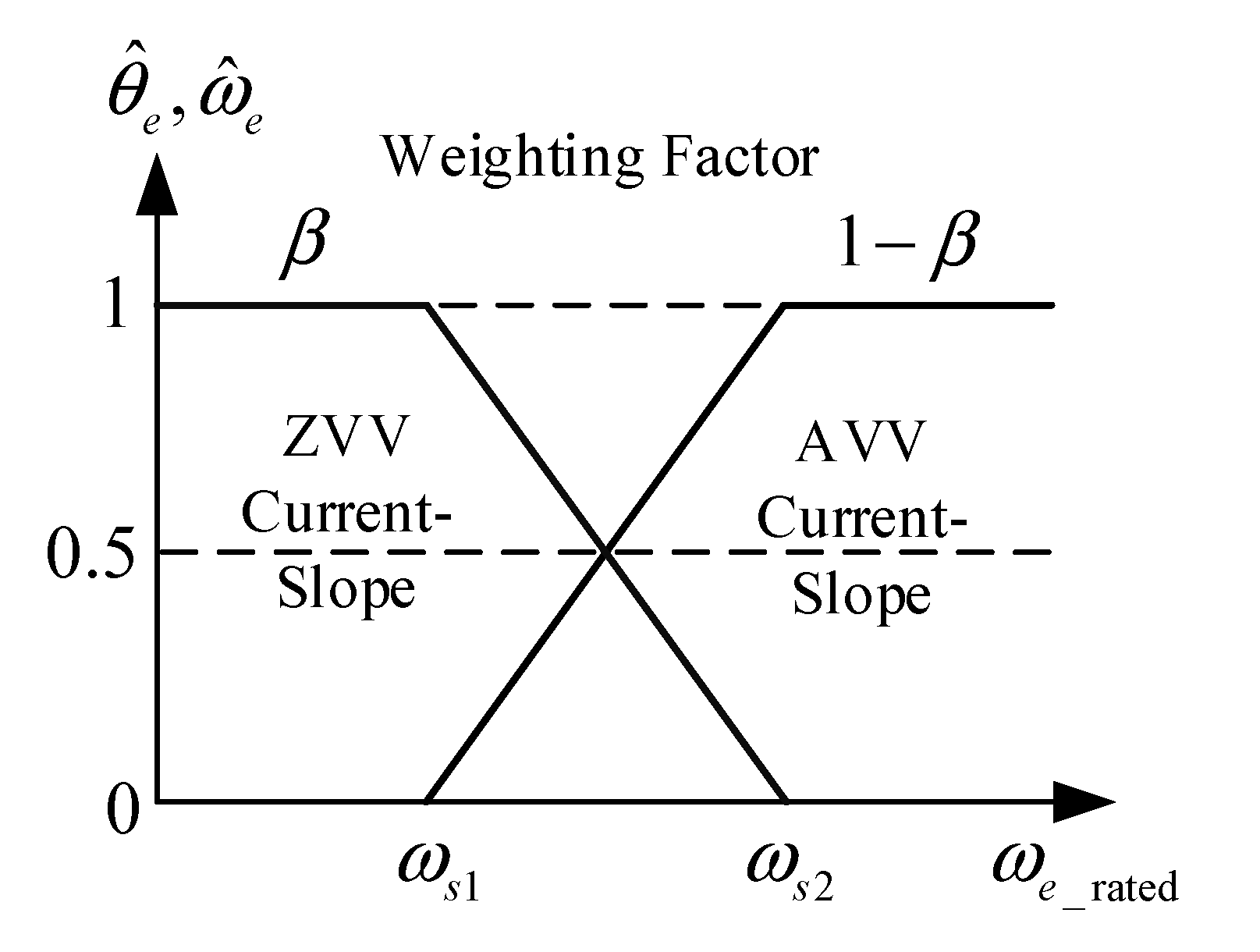
- a linear combination method, including a zero voltage vector (ZVV) algorithm and an AVV algorithm, is proposed with predictive control to operate the sensorless IPMSM drive system from 0 rpm to 3000 rpm. This linear combination method is easily implemented when compared to fuzzy-logic combination methods [24].
2. Mathematical Model of an IPMSM
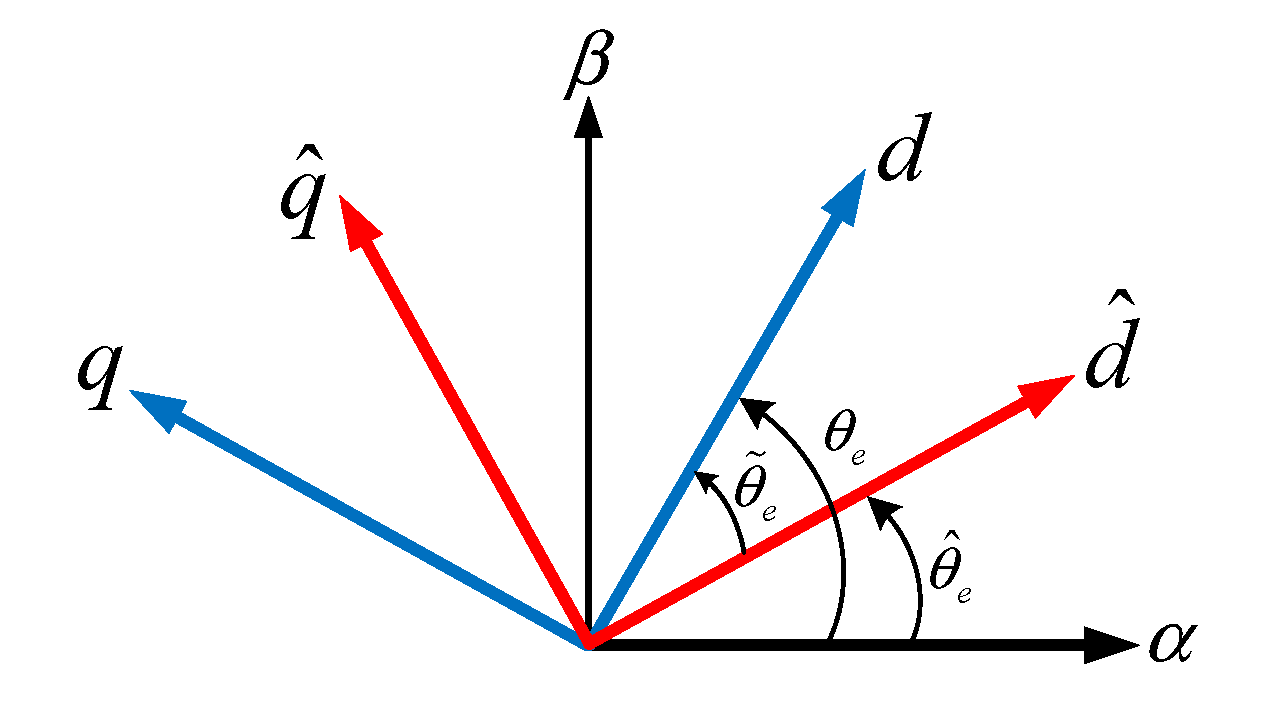
2.1. The d-q Axis Synchronous Frame Model
2.2. The a-b-c Axis Synchronous Frame Model
3. Zero Voltage Vector-Based Current Deviation Rotor Position Estimator
3.1. Basic Principle
3.2. The ZVV Rotor Position Estimating Scheme
4. Active Voltage Vector-Based Current Deviation Rotor Position Estimator
4.1. The AVV Rotor Position Estimation Scheme
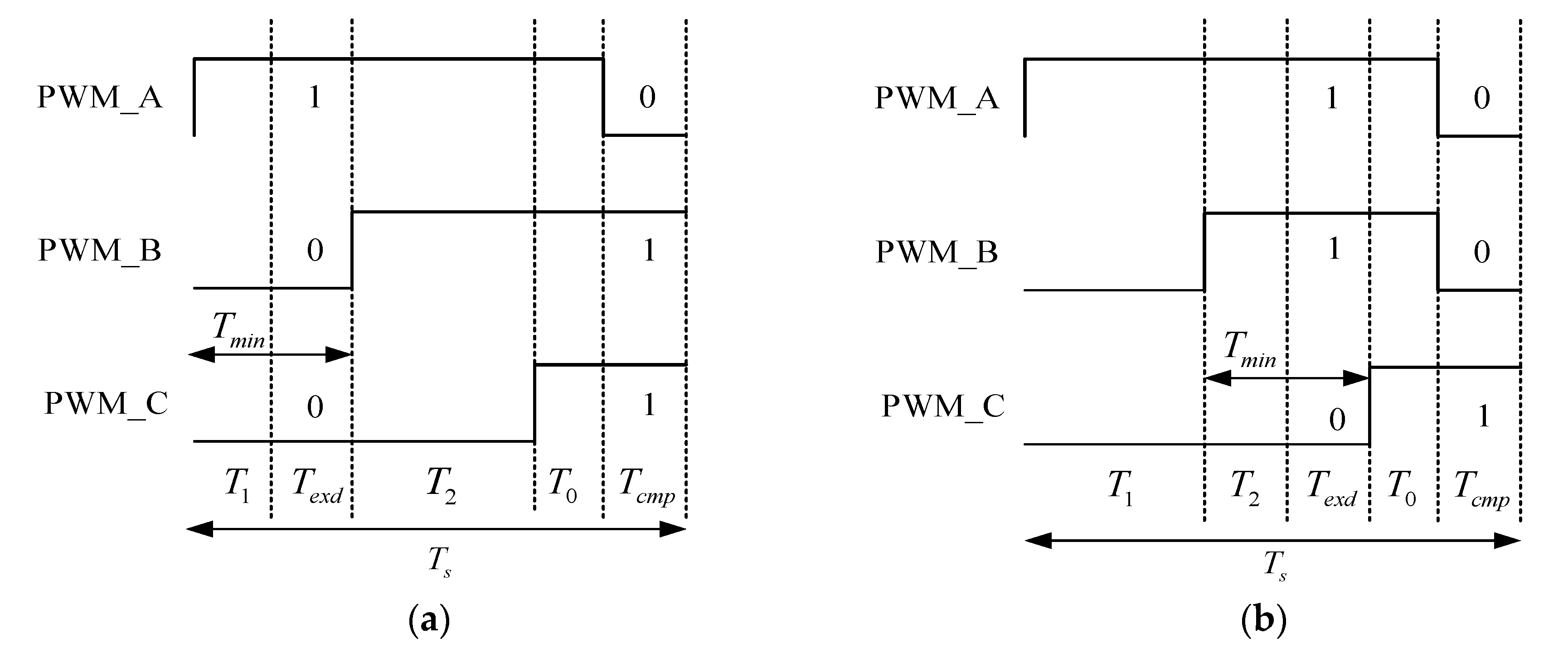
4.2. Space-Vector Extension And Compensation
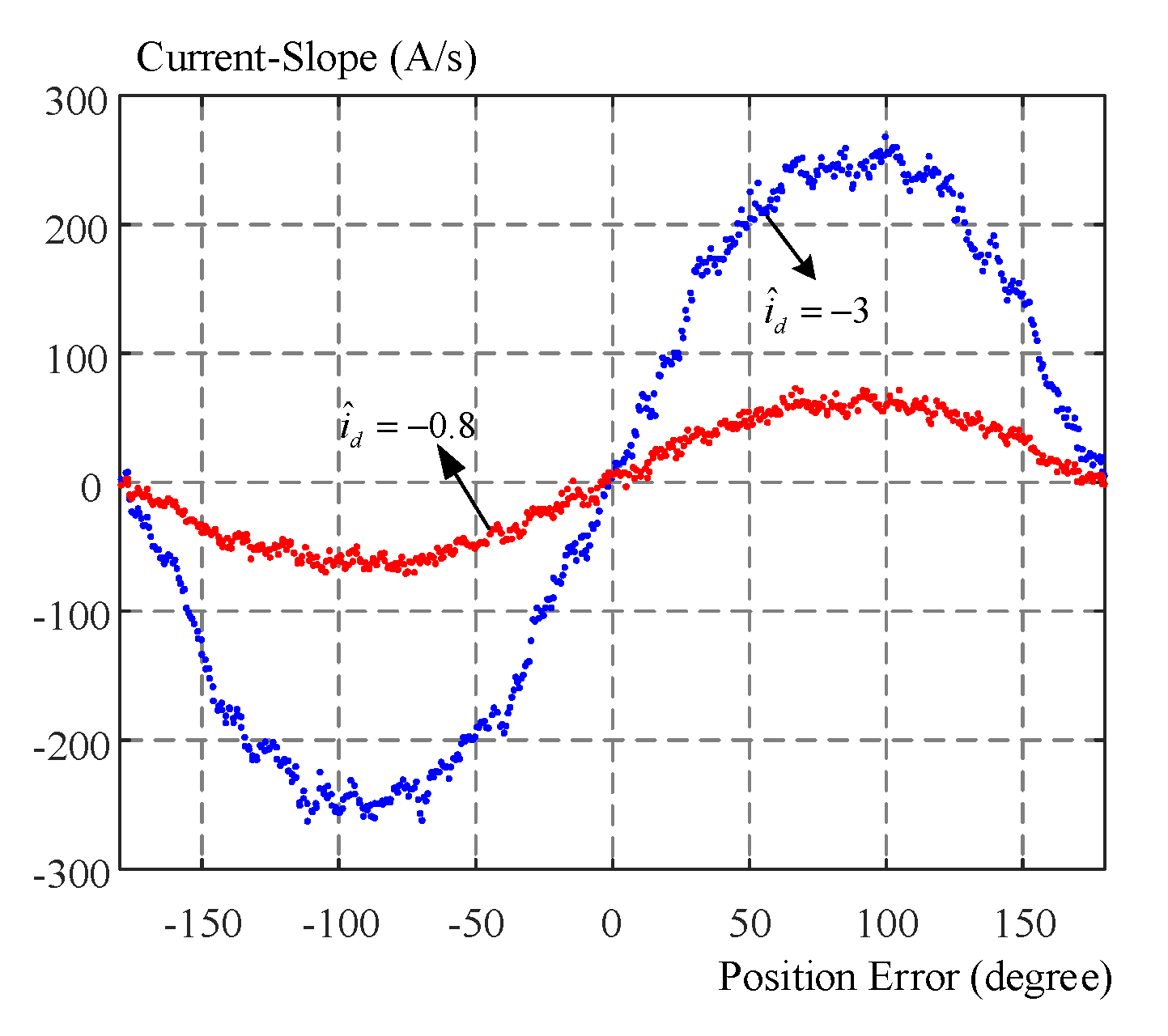
5. Current Deviation Detection Technique
6. Linear Transition from Standstill and Low-Speed to High-Speed
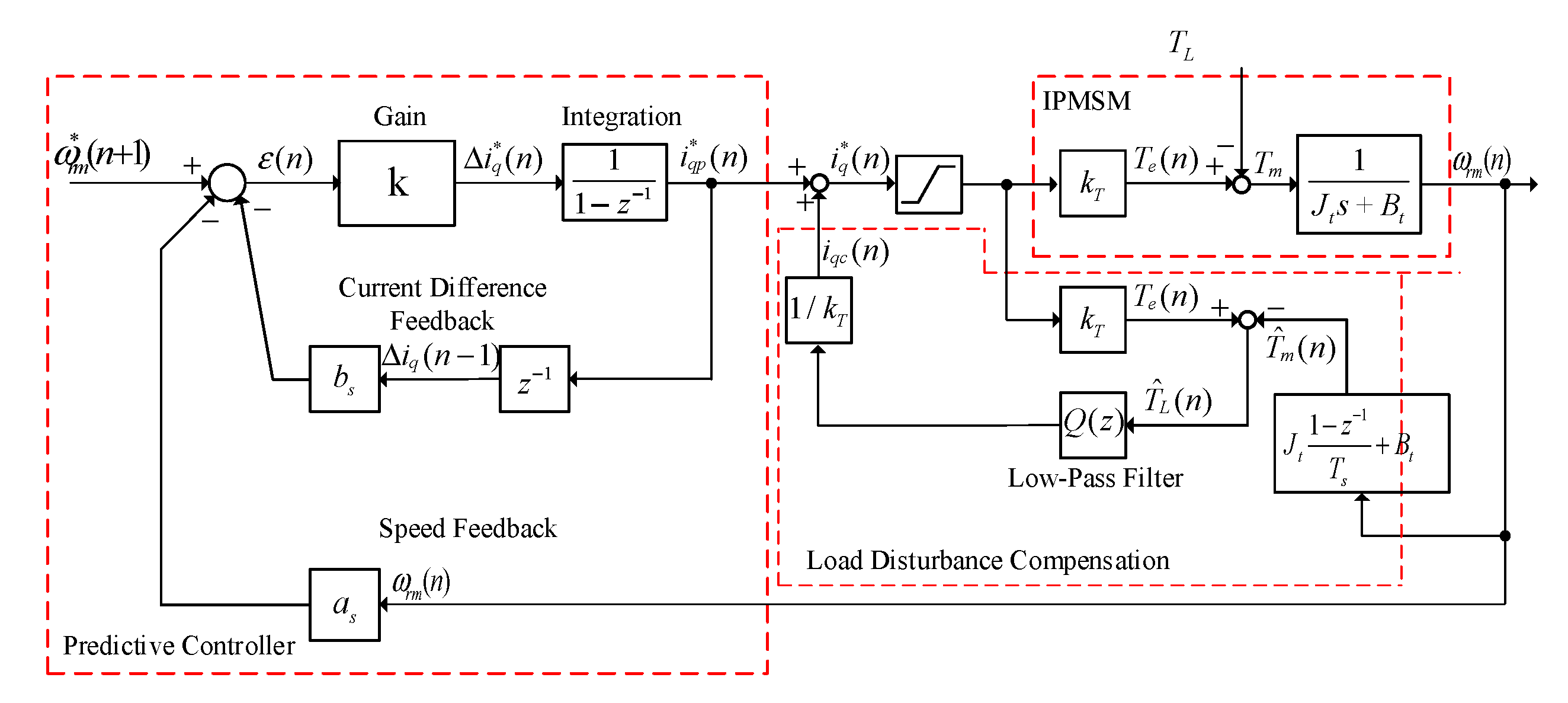
7. Predictive Speed Controller Design
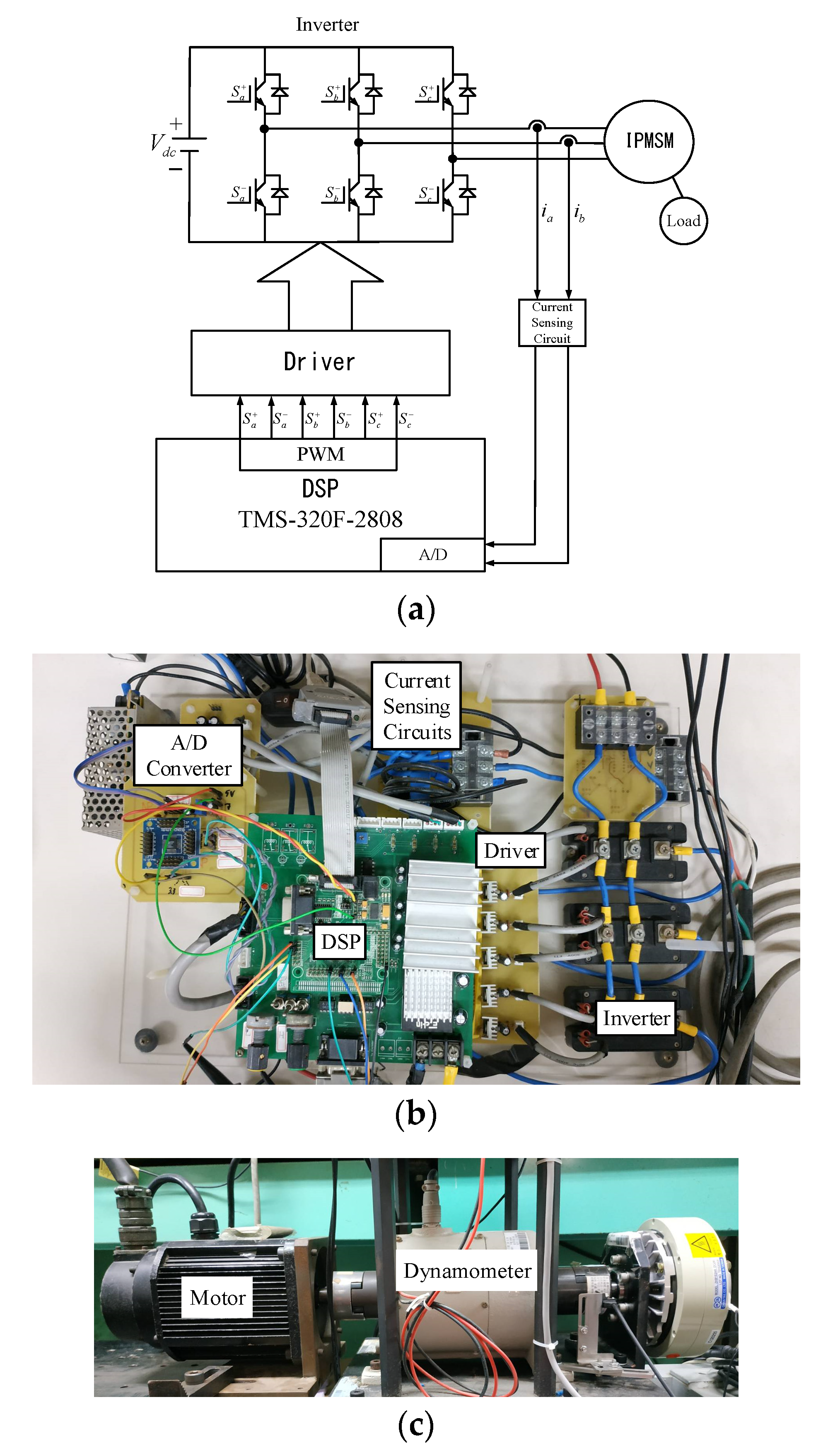
8. Implementation
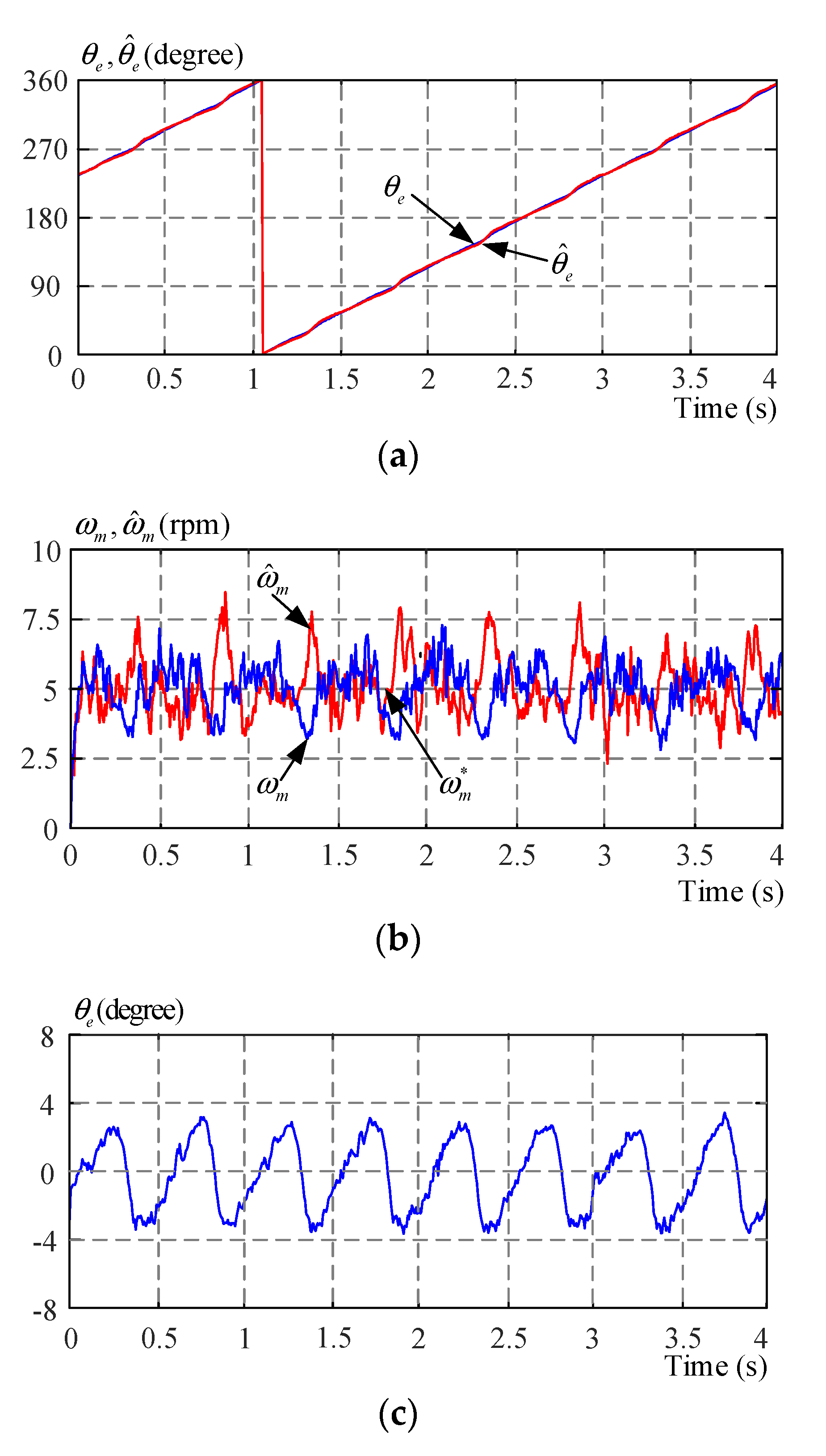
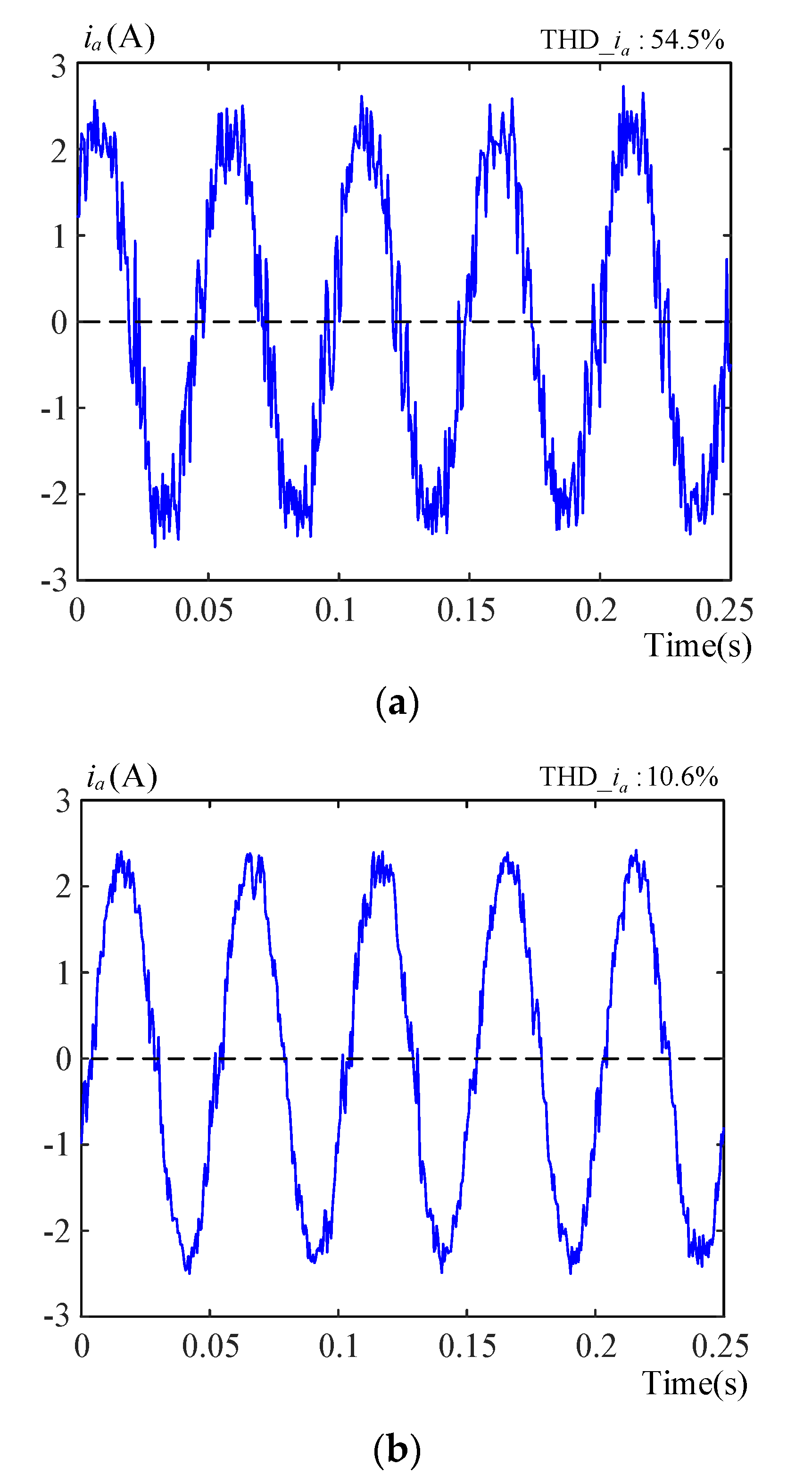
9. Experimental Results
10. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Piippo, A.; Hinkkanen, M.; Luomi, J. Analysis of an Adaptive Observer for Sensorless Control of Interior Permanent Magnet Synchronous Motors. IEEE Trans. Ind. Electron. 2008, 55, 570–576. [Google Scholar] [CrossRef] [Green Version]
- Sheng, L.; Sheng, L.; Wang, Y.; Fan, M.; Yang, X. Sensorless Control of a Shearer Short-Range Cutting Interior Permanent Magnet Synchronous Motor Based on a New Sliding Mode Observer. IEEE Access 2017, 5, 18439–18450. [Google Scholar] [CrossRef]
- Batzel, T.; Lee, K. Electric Propulsion With the Sensorless Permanent Magnet Synchronous Motor: Model and Approach. IEEE Trans. Energy Convers. 2005, 20, 818–825. [Google Scholar] [CrossRef]
- Zhang, G.; Wang, G.; Xu, D.G.; Zhao, N. ADALINE-Network-Based PLL for Position Sensorless Interior Permanent Magnet Synchronous Motor Drives. IEEE Trans. Power Electron. 2015, 31, 1450–1460. [Google Scholar] [CrossRef]
- Wu, X.; Huang, S.; Liu, K.; Lu, K.; Hu, Y.; Pan, W.; Peng, X. Enhanced Position Sensorless Control Using Bilinear Recursive Least Squares Adaptive Filter for Interior Permanent Magnet Synchronous Motor. IEEE Trans. Power Electron. 2020, 35, 681–698. [Google Scholar] [CrossRef]
- Colli, V.D.; Di Stefano, R.L.; Marignetti, F. A System-on-Chip Sensorless Control for a Permanent-Magnet Synchronous Motor. IEEE Trans. Ind. Electron. 2010, 57, 3822–3829. [Google Scholar] [CrossRef]
- Chen, Z.; Tomita, M.; Doki, S.; Okuma, S. An extended electromotive force model for sensorless control of interior permanent-magnet synchronous motors. IEEE Trans. Ind. Electron. 2003, 50, 288–295. [Google Scholar] [CrossRef]
- Wang, G.; Ding, L.; Li, Z.; Xu, J.; Zhang, G.; Zhan, H.; Ni, R.; Xu, D.G. Enhanced Position Observer Using Second-Order Generalized Integrator for Sensorless Interior Permanent Magnet Synchronous Motor Drives. IEEE Trans. Energy Convers. 2014, 29, 486–495. [Google Scholar] [CrossRef]
- An, Q.-T.; Zhang, J.; An, Q.; Liu, X.; Shamekov, A.; Bi, K. Frequency-Adaptive Complex-Coefficient Filter-Based Enhanced Sliding Mode Observer for Sensorless Control of Permanent Magnet Synchronous Motor Drives. IEEE Trans. Ind. Appl. 2020, 56, 335–343. [Google Scholar] [CrossRef]
- Nguyen, D.; Dutta, R.; Rahman, M.F.; Fletcher, J.E. Performance of a Sensorless Controlled Concentrated-Wound Interior Permanent-Magnet Synchronous Machine at Low and Zero Speed. IEEE Trans. Ind. Electron. 2015, 63, 2016–2026. [Google Scholar] [CrossRef]
- Sun, X.; Cao, J.; Lei, G.; Guo, Y.; Zhu, J. Speed Sensorless Control for Permanent Magnet Synchronous Motors Based on Finite Position Set. IEEE Trans. Ind. Electron. 2020, 67, 6089–6100. [Google Scholar] [CrossRef]
- Barcaro, M.; Morandin, M.; Pradella, T.; Bianchi, N.; Furlan, I. Iron Saturation Impact on High-Frequency Sensorless Control of Synchronous Permanent-Magnet Motor. IEEE Trans. Ind. Appl. 2017, 53, 5470–5478. [Google Scholar] [CrossRef]
- Shinnaka, S. A New Speed-Varying Ellipse Voltage Injection Method for Sensorless Drive of Permanent-Magnet Synchronous Motors With Pole Saliency—New PLL Method Using High-Frequency Current Component Multiplied Signal. IEEE Trans. Ind. Appl. 2008, 44, 777–788. [Google Scholar] [CrossRef]
- Park, N.-C.; Kim, S.-H. Simple sensorless algorithm for interior permanent magnet synchronous motors based on high-frequency voltage injection method. IET Electron. Power Appl. 2014, 8, 68–75. [Google Scholar] [CrossRef]
- Haque, M.; Zhong, L.; Rahman, M. A sensorless initial rotor position estimation scheme for a direct torque controlled interior permanent magnet synchronous motor drive. IEEE Trans. Energy Convers. 2003, 18, 1376–1383. [Google Scholar] [CrossRef]
- Bui, M.X.; Guan, D.; Xiao, D.; Rahman, M.F. A Modified Sensorless Control Scheme for Interior Permanent Magnet Synchronous Motor Over Zero to Rated Speed Range Using Current Derivative Measurements. IEEE Trans. Ind. Electron. 2018, 66, 102–113. [Google Scholar] [CrossRef]
- Wei, M.Y.; Liu, T.H. A high-performance sensorless position control system of a synchronous reluctance motor using dual current-deviation estimating technique. IEEE Trans. Ind. Electron. 2012, 59, 3411–3426. [Google Scholar]
- Raute, R.; Caruana, C.; Staines, C.S.; Cilia, J.; Sumner, M.; Asher, G. Analysis and Compensation of Inverter Nonlinearity Effect on a Sensorless PMSM Drive at Very Low and Zero Speed Operation. IEEE Trans. Ind. Electron. 2010, 57, 4065–4074. [Google Scholar] [CrossRef]
- Hosogaya, Y.; Kubota, H. Position estimating method of IPMSM at low speed region using dq-axis current derivative without high frequency component. In Proceedings of the 2013 IEEE 10th International Conference on Power Electronics and Drive Systems (PEDS), Kitakyushu, Japan, 22–25 April 2013; pp. 1306–1311. [Google Scholar]
- Hua, Y.; Sumner, M.; Asher, G.; Gao, Q.; Saleh, K. Improved sensorless control of a permanent magnet machine using fundamental pulse width modulation excitation. IET Electron. Power Appl. 2011, 5, 359–370. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Liu, W.; Chen, Z.; Mao, S.; Meng, T.; Peng, J.; Jiao, N. A Time-Delay Compensation Method for IPMSM Hybrid Sensorless Drives in Rail Transit Applications. IEEE Trans. Ind. Electron. 2018, 66, 6715–6726. [Google Scholar] [CrossRef]
- Gu, M.; Ogasawara, S.; Takemoto, M. Novel PWM Schemes With Multi SVPWM of Sensorless IPMSM Drives for Reducing Current Ripple. IEEE Trans. Power Electron. 2015, 31, 6461–6475. [Google Scholar] [CrossRef]
- Zhang, Z.; Guo, H.; Liu, Y.; Zhang, Q.; Zhu, P.; Iqbal, R. An Improved Sensorless Control Strategy of Ship IPMSM at Full Speed Range. IEEE Access 2019, 7, 178652–178661. [Google Scholar] [CrossRef]
- Fan, W.; Luo, S.; Zou, J.; Zheng, G. A hybrid speed sensorless control strategy for PMSM based on MRAS and fuzzy control. In Proceedings of the 7th International Power Electronics and Motion Control Conference, Harbin, China, 2–5 June 2012; pp. 2976–2980. [Google Scholar]
- Maciejowski, J.M. Predictive Control with Constraints; Prentice Hall: New York, NY, USA, 2002. [Google Scholar]
- Soeterboek, R. Predictive Control—A Unified Approach; Prentice Hall: New York, NY, USA, 1992. [Google Scholar]
- Camacho, E.F.; Bordons, C. Modern Predictive Control, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Wang, L. Model Predictive Control System Design and Implementation Using MATLAB; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Wang, S.; Chai, L.; Yoo, D.; Gan, L.; Ng, K. PID and Predictive Control of Electrical Drives and Power Converters Using MATLAB/Simulink; Wiley: Hoboken, NJ, USA, 2015. [Google Scholar]
- Rodriguez, J.; Cortes, P. Predictive Control of Power Converters and Electrical Drives; Wiley: Hoboken, NJ, USA, 2012. [Google Scholar]


















© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mubarok, M.S.; Liu, T.-H.; Tsai, C.-Y.; Wei, Z.-Y. A Wide-Adjustable Sensorless IPMSM Speed Drive Based on Current Deviation Detection under Space-Vector Modulation. Energies 2020, 13, 4431. https://doi.org/10.3390/en13174431
Mubarok MS, Liu T-H, Tsai C-Y, Wei Z-Y. A Wide-Adjustable Sensorless IPMSM Speed Drive Based on Current Deviation Detection under Space-Vector Modulation. Energies. 2020; 13(17):4431. https://doi.org/10.3390/en13174431
Chicago/Turabian StyleMubarok, Muhammad Syahril, Tian-Hua Liu, Chung-Yuan Tsai, and Zuo-Ying Wei. 2020. "A Wide-Adjustable Sensorless IPMSM Speed Drive Based on Current Deviation Detection under Space-Vector Modulation" Energies 13, no. 17: 4431. https://doi.org/10.3390/en13174431
APA StyleMubarok, M. S., Liu, T. -H., Tsai, C. -Y., & Wei, Z. -Y. (2020). A Wide-Adjustable Sensorless IPMSM Speed Drive Based on Current Deviation Detection under Space-Vector Modulation. Energies, 13(17), 4431. https://doi.org/10.3390/en13174431