A Data-Driven Method with Feature Enhancement and Adaptive Optimization for Lithium-Ion Battery Remaining Useful Life Prediction

 , ,
, , 

Abstract
:
1. Introduction
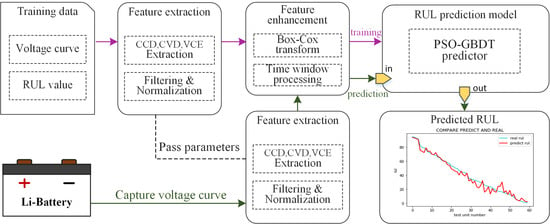
- Duration of constant current mode, duration of constant voltage mode and energy of discharge voltage are extracted as features so that we can capture the degradation of the battery from various angles.
- The feature enhancement technologies including the box-cox transformation and the time window processing are proposed to fully exploit the potential of features.
- PSO is introduced to adaptively find the optimal parameters of GBDT, which improves the accuracy and stability of RUL prediction.
2. Proposed Approach
2.1. Framework
2.2. Raw Feature Extraction and Correlation Analysis
2.3. Box–Cox Transformation and Time Window Processing
2.4. Gradient Boosting Decision Trees (GBDT) for RUL Prediction
| Algorithm 1 The training and optimization process of the PSO-GBDT model. |
|
2.5. Particle Swarm Optimization (PSO) for Model Optimization
3. Data Description and Feature Analysis
3.1. Lithium-Ion Battery Data Set
3.2. Raw Feature Extraction
3.3. Correlation Enhancement for Features
4. Battery RUL Prediction with PSO-GBDT Model
4.1. Model Parameter Optimization with PSO
4.2. Experimental Case 1: Single Battery Data
4.3. Experimental Case 2: Prediction for an Untrained Battery
4.4. Experimental Case 3: Prediction for A Battery with Different Discharge Currents
4.5. Experimental Case 4: Prediction for A Battery with Different Temperatures
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| RUL | remaining useful life |
| duration of constant current mode | |
| duration of constant voltage mode | |
| energy of discharge voltage | |
| GBDT | gradient boosting decision trees |
| PSO | particle swarm optimization |
References
- Han, X.; Ouyang, M.; Lu, L.; Li, J.; Zheng, Y.; Li, Z. A comparative study of commercial lithium ion battery cycle life in electrical vehicle: Aging mechanism identification. J. Power Sources 2014, 251, 38–54. [Google Scholar] [CrossRef]
- Gao, K.; Han, F.; Dong, P.; Xiong, N.; Du, R. Connected Vehicle as a Mobile Sensor for Real Time Queue Length at Signalized Intersections. Sensors 2019, 19, 2059. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rezvanizaniani, S.M.; Liu, Z.; Chen, Y.; Lee, J. Review and recent advances in battery health monitoring and prognostics technologies for electric vehicle (EV) safety and mobility. J. Power Sources 2014, 256, 110–124. [Google Scholar] [CrossRef]
- Kennedy, B.; Patterson, D.; Camilleri, S. Use of lithium-ion batteries in electric vehicles. J. Power Sources 2000, 90, 156–162. [Google Scholar] [CrossRef]
- Saha, B.; Goebel, K.; Christophersen, J. Comparison of prognostic algorithms for estimating remaining useful life of batteries. Trans. Inst. Meas Control 2009, 31, 293–308. [Google Scholar] [CrossRef]
- Huynh, K.T.; Castro, I.T.; Barros, A.; Bérenguer, C. On the use of mean residual life as a condition index for condition-based maintenance decision-making. IEEE Trans. Syst. Man Cybern Syst. 2013, 44, 877–893. [Google Scholar] [CrossRef]
- Goebel, K.; Saha, B.; Saxena, A.; Celaya, J.R.; Christophersen, J.P. Prognostics in battery health management. IEEE Instrum. Meas. Mag. 2008, 11, 33–40. [Google Scholar] [CrossRef]
- Ma, G.; Zhang, Y.; Cheng, C.; Zhou, B.; Hu, P.; Yuan, Y. Remaining useful life prediction of lithium-ion batteries based on false nearest neighbors and a hybrid neural network. Appl. Energy 2019, 253, 113626. [Google Scholar] [CrossRef]
- Cai, Y.; Yang, L.; Deng, Z.; Zhao, X.; Deng, H. Prediction of lithium-ion battery remaining useful life based on hybrid data-driven method with optimized parameter. In Proceedings of the 2nd International Conference on Power and Renewable Energy (ICPRE), Chengdu, China, 20–23 September 2017; pp. 1–6. [Google Scholar]
- Remmlinger, J.; Buchholz, M.; Meiler, M.; Bernreuter, P.; Dietmayer, K. State-of-health monitoring of lithium-ion batteries in electric vehicles by on-board internal resistance estimation. J. Power Sources 2011, 196, 5357–5363. [Google Scholar] [CrossRef]
- Ramadass, P.; Haran, B.; Gomadam, P.M.; White, R.; Popov, B.N. Development of first principles capacity fade model for Li-ion cells. J. Electrochem. Soc. 2004, 151, A196–A203. [Google Scholar] [CrossRef]
- Xian, W.; Long, B.; Li, M.; Wang, H. Prognostics of lithium-ion batteries based on the Verhulst model, particle swarm optimization and particle filter. IEEE Trans. Instrum. Meas. 2013, 63, 2–17. [Google Scholar] [CrossRef]
- He, W.; Williard, N.; Osterman, M.; Pecht, M. Prognostics of lithium-ion batteries based on Dempster–Shafer theory and the Bayesian Monte Carlo method. J. Power Sources 2011, 196, 10314–10321. [Google Scholar] [CrossRef]
- Eddahech, A.; Briat, O.; Woirgard, E.; Vinassa, J.M. Remaining useful life prediction of lithium batteries in calendar ageing for automotive applications. Microelectron. Reliab. 2012, 52, 2438–2442. [Google Scholar] [CrossRef]
- Kemper, P.; Li, S.E.; Kum, D. Simplification of pseudo two dimensional battery model using dynamic profile of lithium concentration. J. Power Sources 2015, 286, 510–525. [Google Scholar] [CrossRef]
- Huang, B.; Cohen, K.; Zhao, Q. Active anomaly detection in heterogeneous processes. IEEE Trans. Inform. Theory 2018, 65, 2284–2301. [Google Scholar] [CrossRef] [Green Version]
- Huang, B.; Cohen, K.; Zhao, Q. Active anomaly detection in heterogeneous processes. In Proceedings of the International Conference on Acoustics, Speech and Signal Processing (ICASSP), Calgary, AB, Canada, 15–20 April 2018; Volume 65, pp. 3924–3928. [Google Scholar]
- Torai, S.; Nakagomi, M.; Yoshitake, S.; Yamaguchi, S.; Oyama, N. State-of-health estimation of LiFePO4/graphite batteries based on a model using differential capacity. J. Power Sources 2016, 306, 62–69. [Google Scholar] [CrossRef]
- Dong, H.; Jin, X.; Lou, Y.; Wang, C. Lithium-ion battery state of health monitoring and remaining useful life prediction based on support vector regression-particle filter. J. Power Sources 2014, 271, 114–123. [Google Scholar] [CrossRef]
- Klass, V.; Behm, M.; Lindbergh, G. A support vector machine-based state-of-health estimation method for lithium-ion batteries under electric vehicle operation. J. Power Sources 2014, 270, 262–272. [Google Scholar] [CrossRef]
- Patil, M.A.; Tagade, P.; Hariharan, K.S.; Kolake, S.M.; Song, T.; Yeo, T.; Doo, S. A novel multistage Support Vector Machine based approach for Li ion battery remaining useful life estimation. Appl. Energy 2015, 159, 285–297. [Google Scholar] [CrossRef]
- Eddahech, A.; Briat, O.; Bertrand, N.; Deletage, J.Y.; Vinassa, J.M. Behavior and state-of-health monitoring of Li-ion batteries using impedance spectroscopy and recurrent neural networks. Int. J. Elec. Power 2012, 42, 487–494. [Google Scholar] [CrossRef]
- Wu, J.; Zhang, C.; Chen, Z. An online method for lithium-ion battery remaining useful life estimation using importance sampling and neural networks. Appl. Energy 2016, 173, 134–140. [Google Scholar] [CrossRef]
- Ng, S.S.Y.; Xing, Y.; Tsui, K.L. A naive Bayes model for robust remaining useful life prediction of lithium-ion battery. Appl. Energy 2014, 118, 114–123. [Google Scholar] [CrossRef]
- Cheng, Y.; Lu, C.; Li, T.; Tao, L. Residual lifetime prediction for lithium-ion battery based on functional principal component analysis and Bayesian approach. Energy 2015, 90, 1983–1993. [Google Scholar] [CrossRef]
- Razavi-Far, R.; Farajzadeh-Zanjani, M.; Chakrabarti, S.; Saif, M. Data-driven prognostic techniques for estimation of the remaining useful life of lithium-ion batteries. In Proceedings of the IEEE International Conference on Prognostics and Health Management (ICPHM), Ottawa, ON, Canada, 20–22 June 2016; pp. 1–8. [Google Scholar]
- Lee, S.; Kim, J.; Lee, J.; Cho, B.H. State-of-charge and capacity estimation of lithium-ion battery using a new open-circuit voltage versus state-of-charge. J. Power Sources 2008, 185, 1367–1373. [Google Scholar] [CrossRef]
- Liu, D.; Wang, H.; Peng, Y.; Xie, W.; Liao, H. Satellite lithium-ion battery remaining cycle life prediction with novel indirect health indicator extraction. Energies 2013, 6, 3654–3668. [Google Scholar] [CrossRef]
- Widodo, A.; Shim, M.C.; Caesarendra, W.; Yang, B.S. Intelligent prognostics for battery health monitoring based on sample entropy. Expert Syst. Appl. 2011, 38, 11763–11769. [Google Scholar] [CrossRef]
- Wu, L.; Fu, X.; Guan, Y. Review of the remaining useful life prognostics of vehicle lithium-ion batteries using data-driven methodologies. Appl. Sci. 2016, 6, 166. [Google Scholar] [CrossRef] [Green Version]
- Yang, D.; Zhang, X.; Pan, R.; Wang, Y.; Chen, Z. A novel Gaussian process regression model for state-of-health estimation of lithium-ion battery using charging curve. J. Power Sources 2018, 384, 387–395. [Google Scholar] [CrossRef]
- Zhang, Y.; Haghani, A. A gradient boosting method to improve travel time prediction. Transp. Res. Part C Emerg. Technol. 2015, 58, 308–324. [Google Scholar] [CrossRef]
- Zheng, Z.; Peng, J.; Deng, K.; Gao, K.; Li, H.; Chen, B.; Yang, Y.; Huang, Z. A Novel Method for Lithium-ion Battery Remaining Useful Life Prediction Using Time Window and Gradient Boosting Decision Trees. In Proceedings of the 10th International Conference on Power Electronics and ECCE Asia (ICPE 2019-ECCE Asia), Busan, Korea, 27–30 May 2019; pp. 3297–3302. [Google Scholar]
- Li, H.; Zhang, X.; Peng, J.; He, J.; Huang, Z.; Wang, J. Cooperative CC-CV Charging of Supercapacitors Using Multi-Charger Systems. IEEE Trans. Ind. Electron. to be published. [CrossRef]
- Tharwat, A. Principal Component Analysis: An Overview. Pattern Recognit. 2016, 65, 197–240. [Google Scholar]
- Osborne, J.W. Improving your data transformations: Applying the Box-Cox transformation. Pract. Assess. Res. Eval. 2010, 15, 1–9. [Google Scholar]
- Saha, B.; Goebel, K. Battery data set. In NASA AMES Progn. Data Repos.; NASA Ames: Moffett Field, CA, USA, 2007. Available online: https://ti.arc.nasa.gov/tech/dash/groups/pcoe/prognostic-data-repository/ (accessed on 5 February 2020).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Battery Number | Charge Current (A) | Discharge Current (A) | End Discharge Voltage (V) | Cut-Off Capacity (Ah) | Temperature (°C) | No of Cycles |
|---|---|---|---|---|---|---|
| #5 | 1.5 | 2 | 2.7 | 1.4 | 24 | 168 |
| #6 | 1.5 | 2 | 2.5 | 1.4 | 24 | 168 |
| #7 | 1.5 | 2 | 2.2 | 1.4 | 24 | 168 |
| #33 | 1.5 | 4 | 2.0 | 1.6 | 24 | 197 |
| #56 | 1.5 | 2 | 2.7 | 1.4 | 4 | 102 |
| Before the Box–Cox Transformation | After the Box–Cox Transformation | |||||||
|---|---|---|---|---|---|---|---|---|
| Feature | #5 | #6 | #7 | Feature | #5 | #6 | #7 | |
| −0.986 | −0.979 | −0.980 | 0.17 | −0.988 | −0.992 | −0.983 | ||
| −0.958 | 0.886 | 0.943 | 3.3 | 0.959 | 0.904 | 0.946 | ||
| −0.988 | −0.966 | −0.988 | −2.8 | −0.995 | −0.990 | −0.994 | ||
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Number of trees | 257 | Minimum samples split | 2.0 |
| Learning rate | 0.147 | Subsample | 1.0 |
| Number of leaf nodes | 408 | Min samples of leaf | 1.0 |
| SVM [21] | MLP [23] | NB [24] | RF [26] | PSO-GBDT (S = 1) | PSO-GBDT (S = 30) | |
|---|---|---|---|---|---|---|
| Case1 | ||||||
| #5 | 2.231 | 3.576 | 2.975 | 2.721 | 1.927 | 0.391 |
| #6 | 3.545 | 4.452 | 4.014 | 3.436 | 2.496 | 0.728 |
| #7 | 2.914 | 3.164 | 2.862 | 3.459 | 2.142 | 1.062 |
| Case2 | ||||||
| #5 | 3.112 | 4.272 | 3.933 | 3.614 | 2.801 | 0.842 |
| #6 | 4.589 | 5.215 | 5.027 | 4.752 | 4.113 | 1.386 |
| #7 | 3.743 | 4.287 | 4.122 | 3.682 | 3.283 | 1.152 |
| Case3 | ||||||
| #33 | 6.254 | 6.239 | 6.238 | 6.140 | 4.981 | 3.008 |
| Case4 | ||||||
| #56 | 6.374 | 6.842 | 6.952 | 6.512 | 5.775 | 3.459 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, J.; Zheng, Z.; Zhang, X.; Deng, K.; Gao, K.; Li, H.; Chen, B.; Yang, Y.; Huang, Z. A Data-Driven Method with Feature Enhancement and Adaptive Optimization for Lithium-Ion Battery Remaining Useful Life Prediction. Energies 2020, 13, 752. https://doi.org/10.3390/en13030752
Peng J, Zheng Z, Zhang X, Deng K, Gao K, Li H, Chen B, Yang Y, Huang Z. A Data-Driven Method with Feature Enhancement and Adaptive Optimization for Lithium-Ion Battery Remaining Useful Life Prediction. Energies. 2020; 13(3):752. https://doi.org/10.3390/en13030752
Chicago/Turabian StylePeng, Jun, Zhiyong Zheng, Xiaoyong Zhang, Kunyuan Deng, Kai Gao, Heng Li, Bin Chen, Yingze Yang, and Zhiwu Huang. 2020. "A Data-Driven Method with Feature Enhancement and Adaptive Optimization for Lithium-Ion Battery Remaining Useful Life Prediction" Energies 13, no. 3: 752. https://doi.org/10.3390/en13030752
APA StylePeng, J., Zheng, Z., Zhang, X., Deng, K., Gao, K., Li, H., Chen, B., Yang, Y., & Huang, Z. (2020). A Data-Driven Method with Feature Enhancement and Adaptive Optimization for Lithium-Ion Battery Remaining Useful Life Prediction. Energies, 13(3), 752. https://doi.org/10.3390/en13030752