Generalized Modeling of Soft-Capture Manipulator with Novel Soft-Contact Joints


Abstract
:1. Introduction
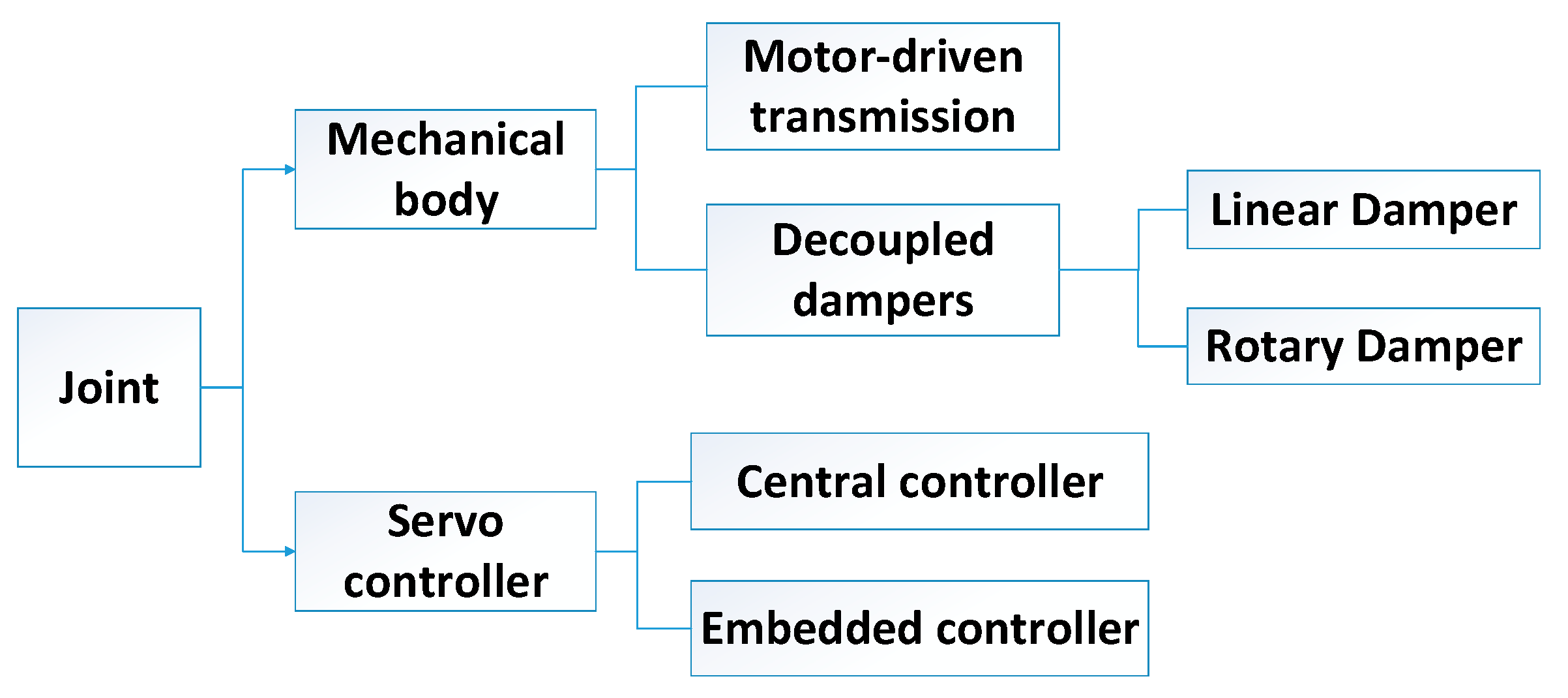
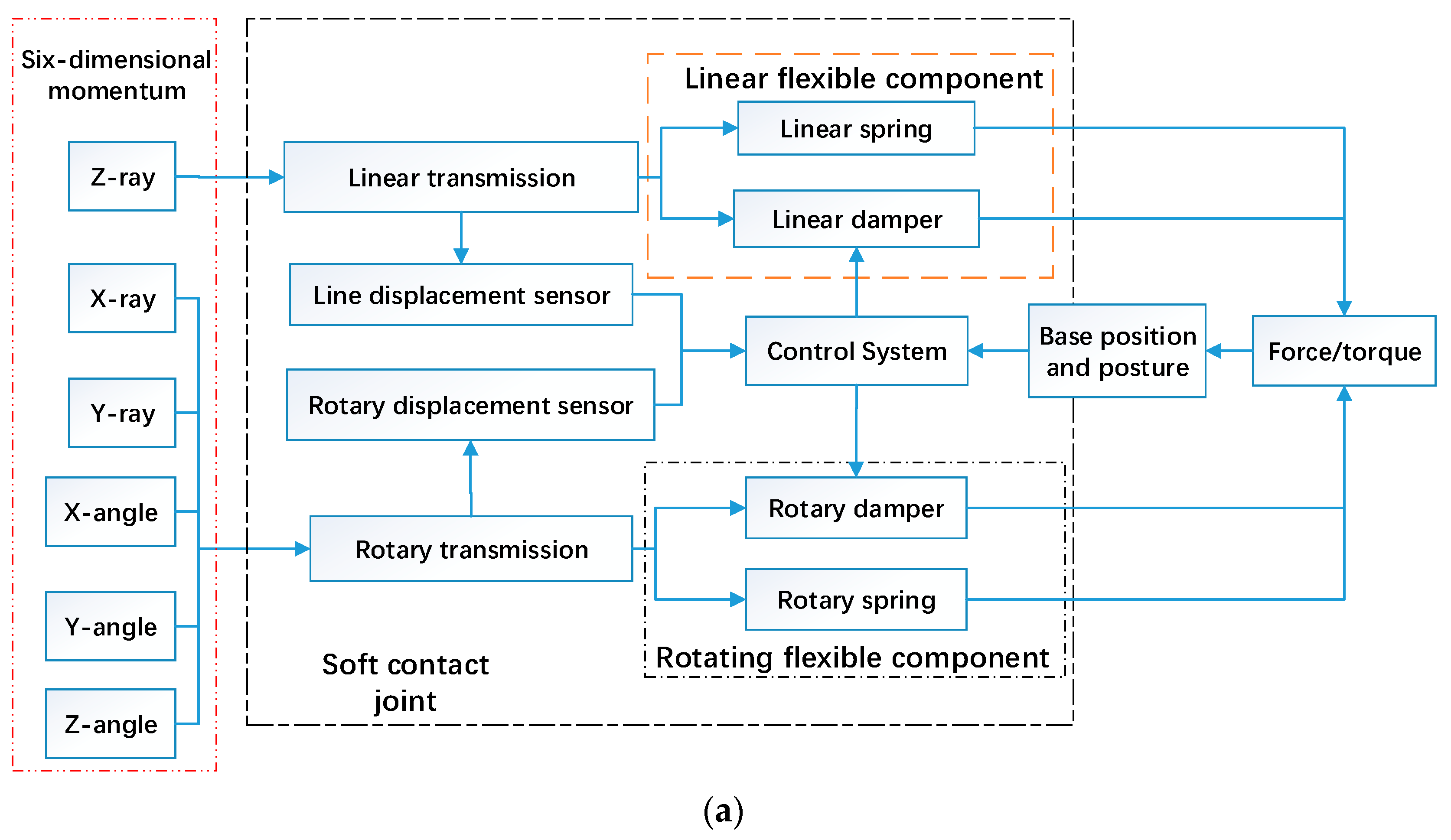
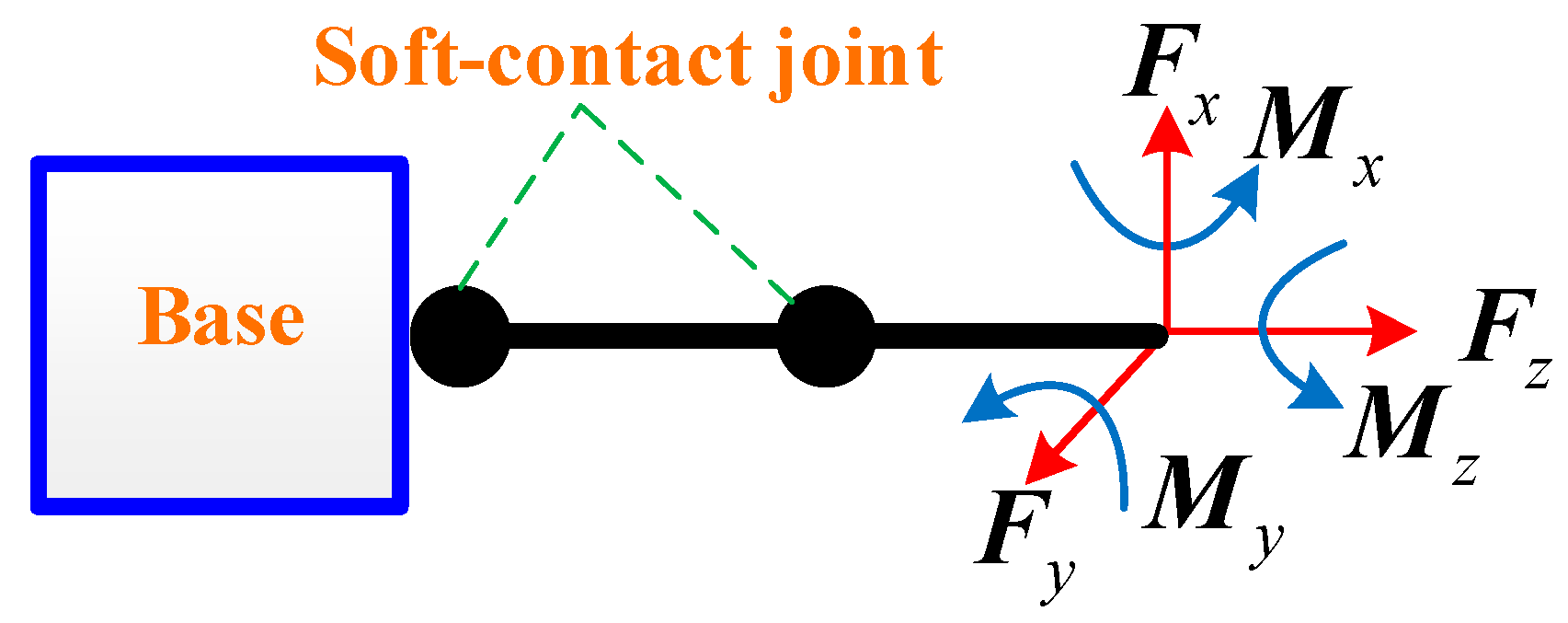
2. Joint Function for a Space-Borne Soft-Capture Manipulator
- Transmission capability: i.e., rotation range of each axis can be (−90, + 90) degrees.
- Measurement functions: i.e., motions, forces, and controllable variables can be measured.
- Closed-loop control: i.e., motion, damping force, and path planning can be controlled.
- Buffer and unloading of spatial momentum: i.e., the decoupled dampers are necessary to be designed in the joint.
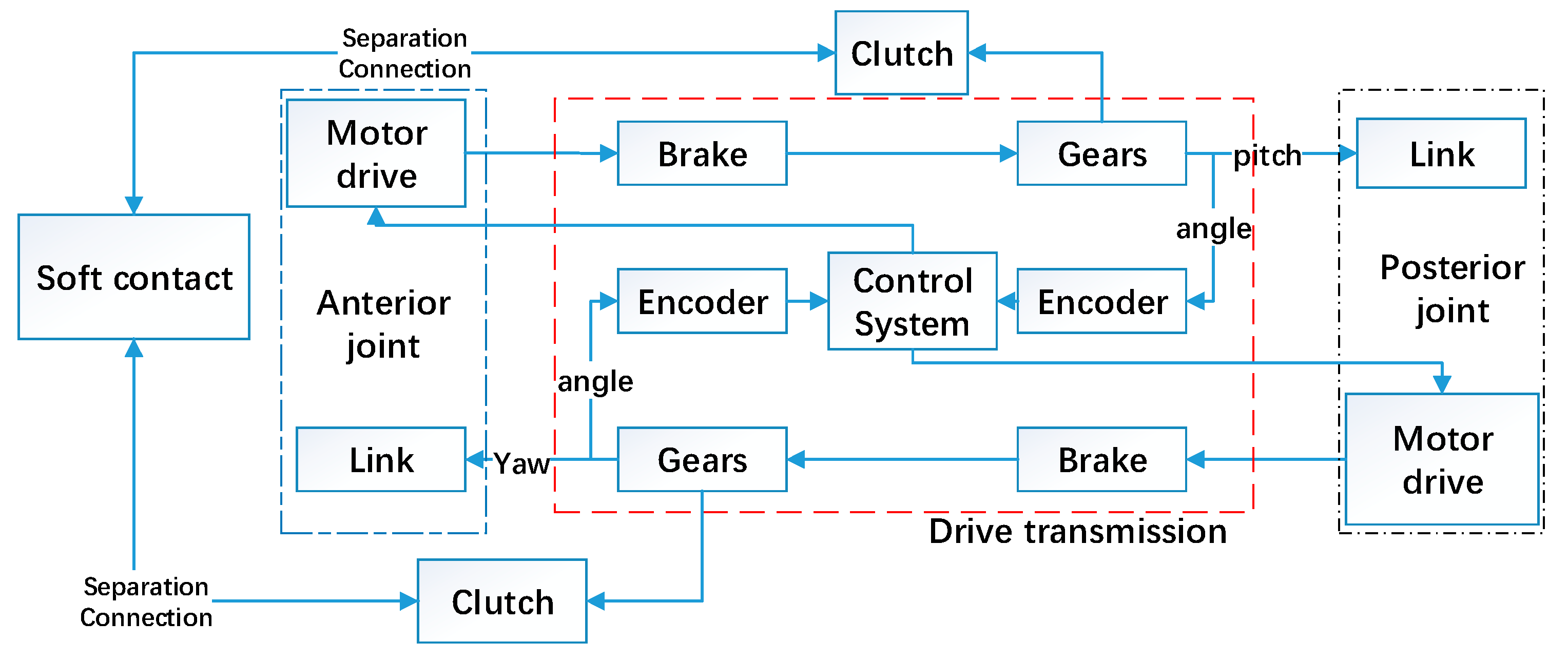
- Dual modes switching: i.e., the motor transmission mode and soft contact mode can be controlled by clutch according to the on-orbit tasks.
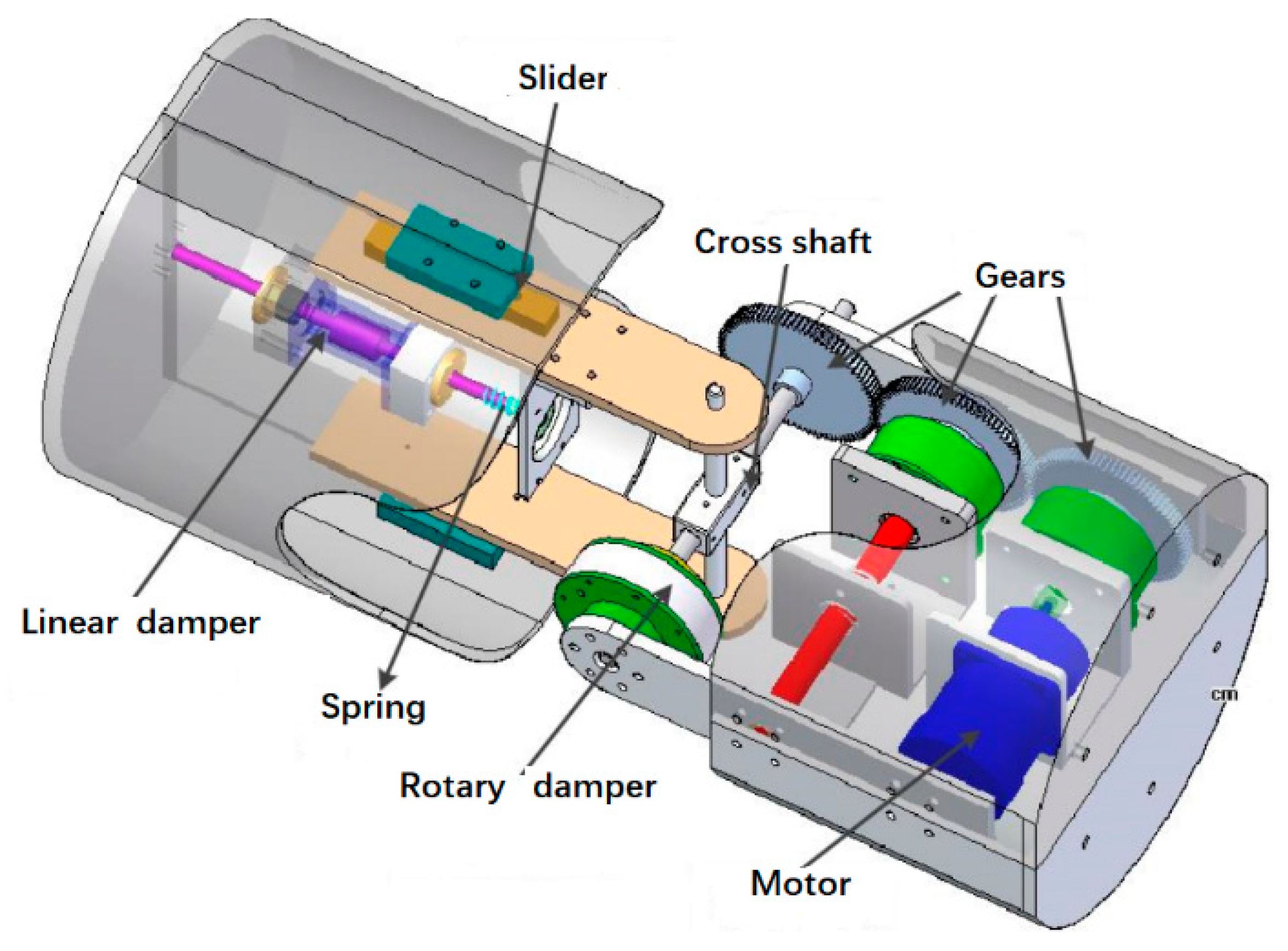
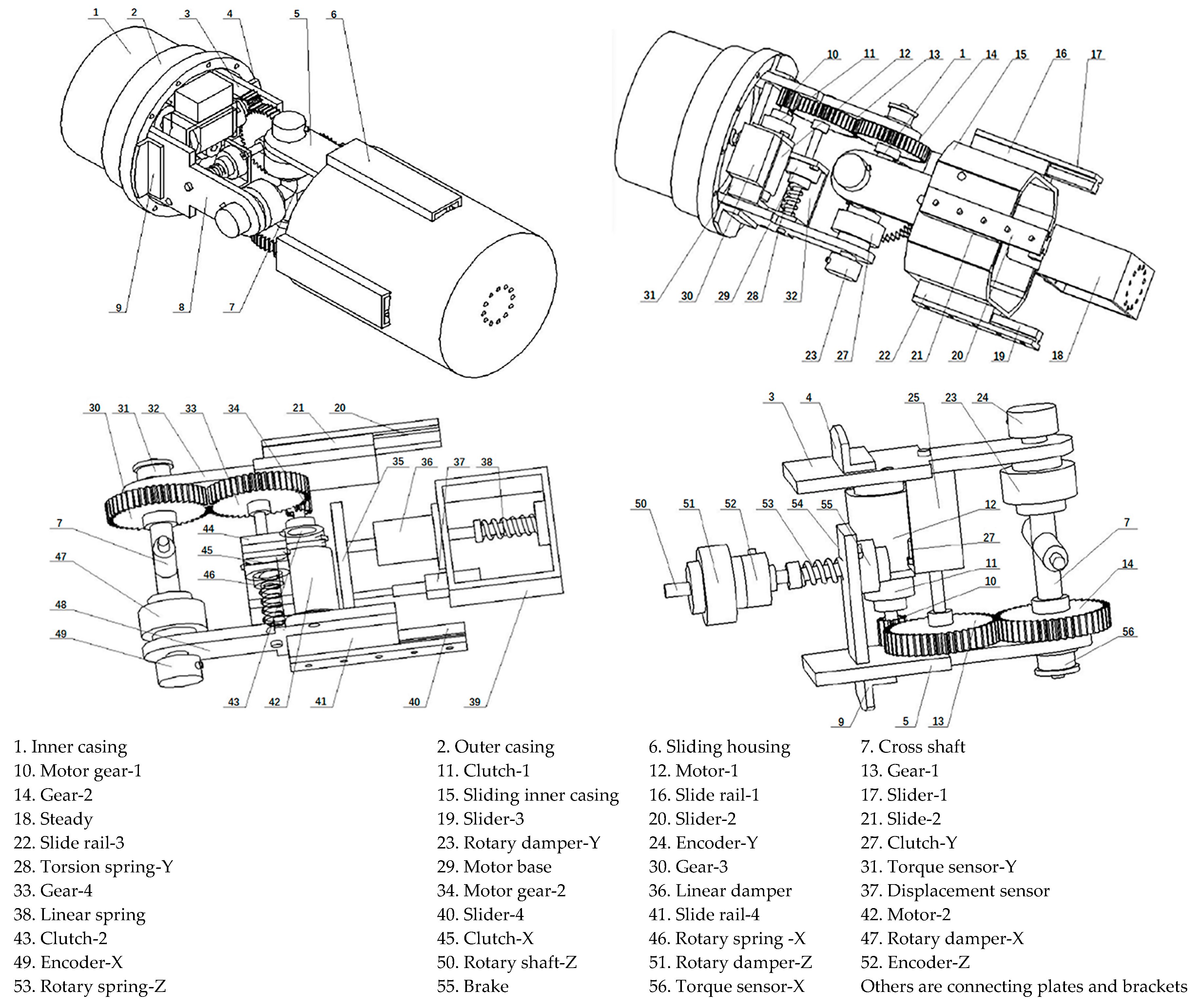
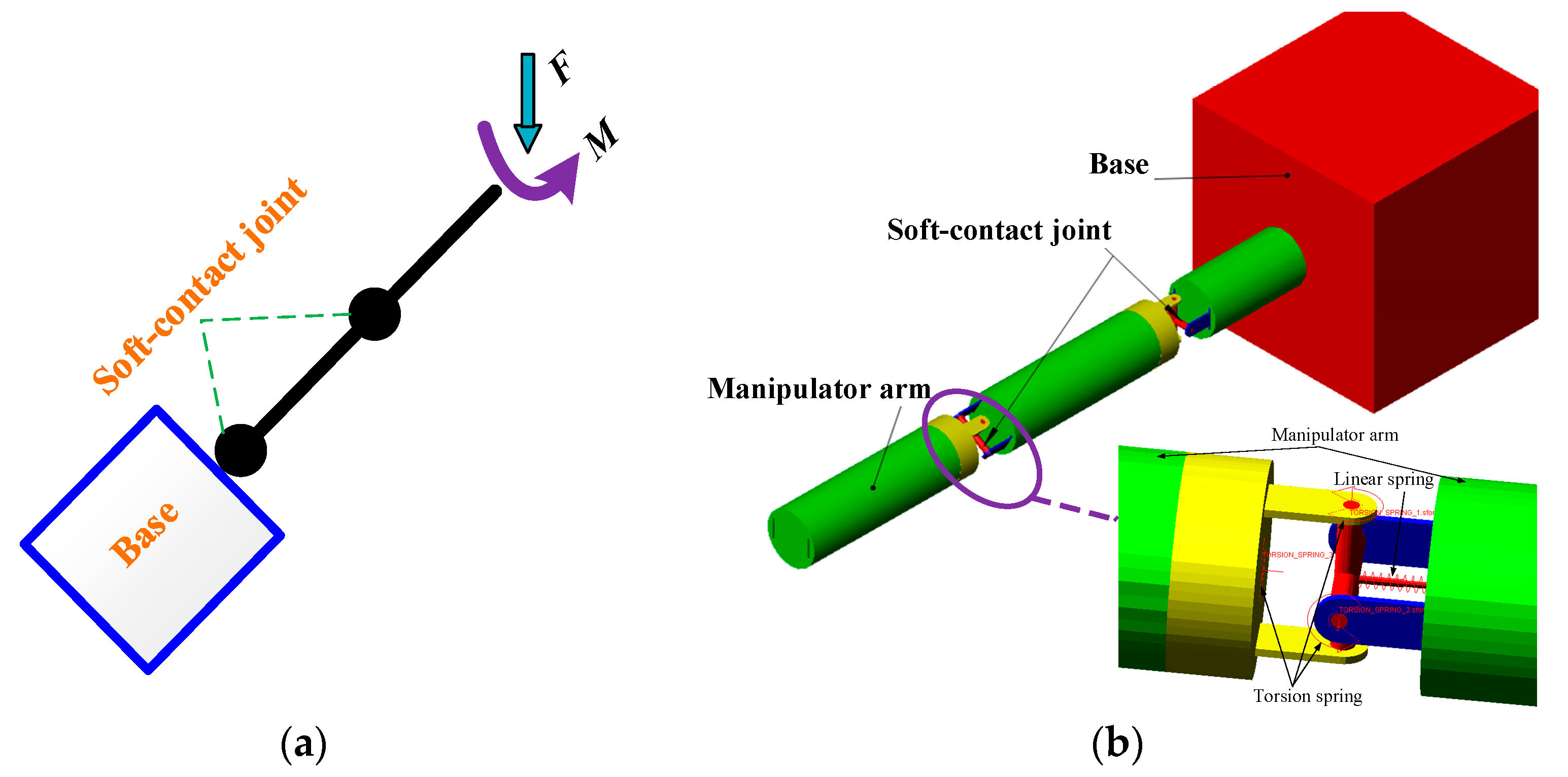
3. Structure Design of the Soft-contact Joint
4. Generalized Model of Manipulator
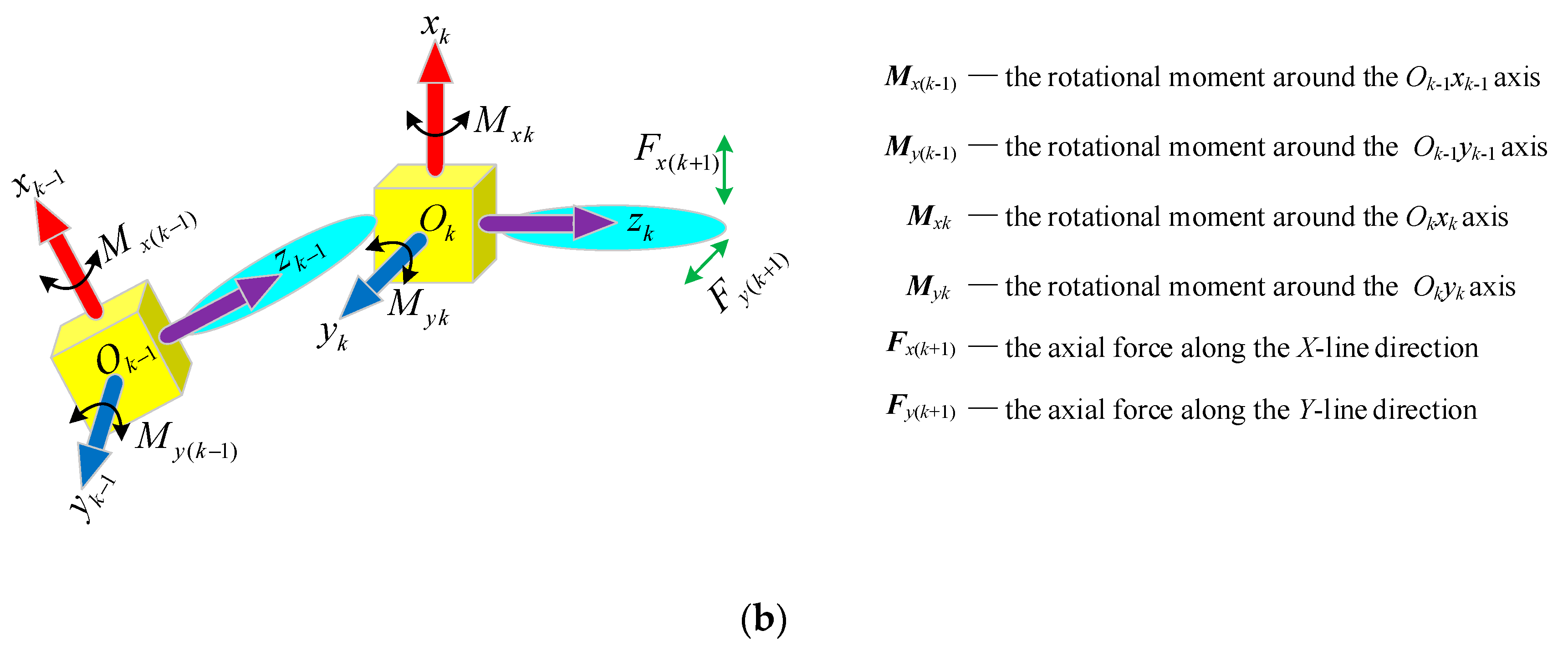
4.1. Transformation Matrix
4.2. Partial Angular Velocity and Partial Linear Velocity
- —position vector of O1x1y1z1 in the inertial frame,
- —position vector of the ith segment in Oixiyizi, and
- —vector of the centroid of the kth segment in Okxkykzk.
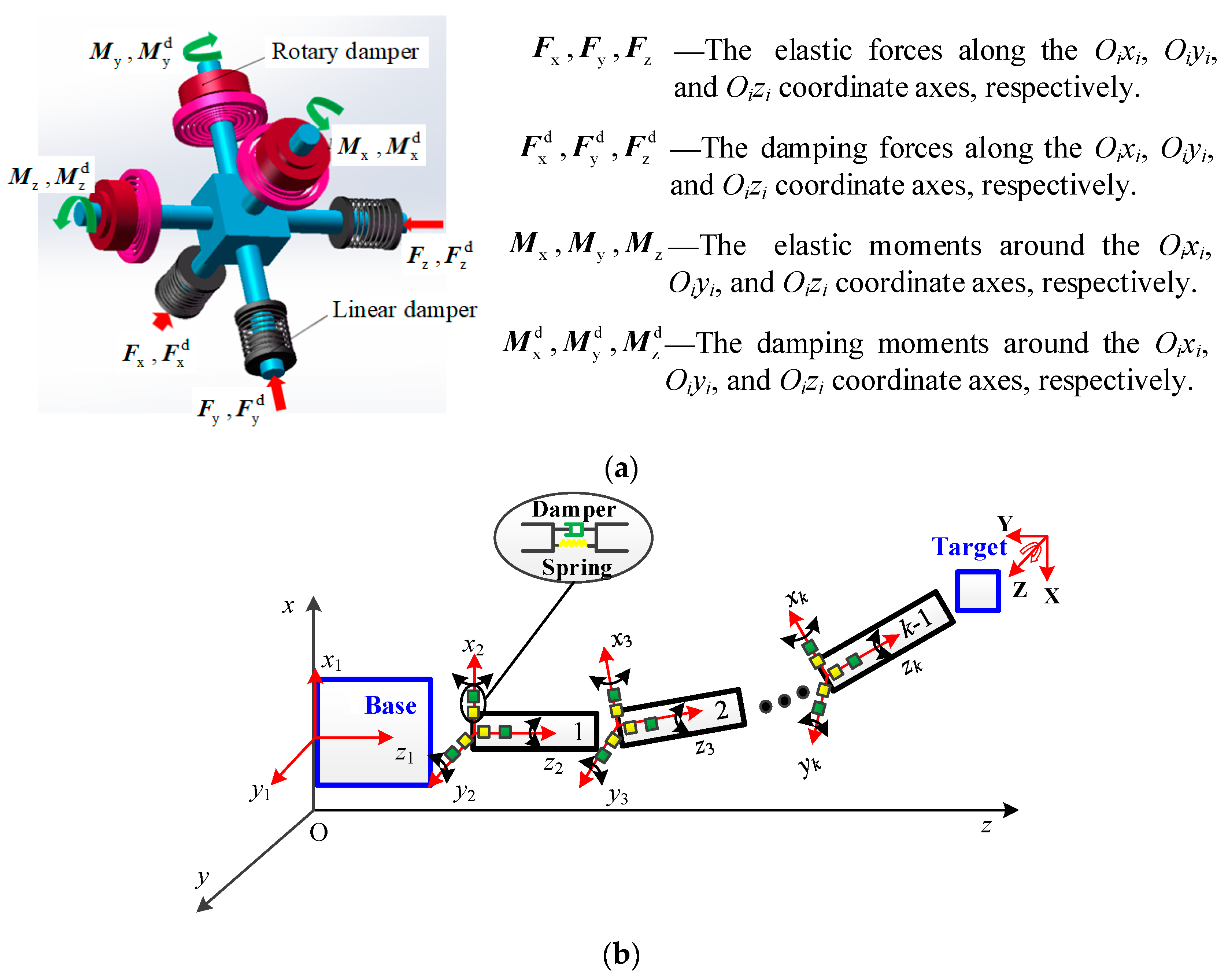
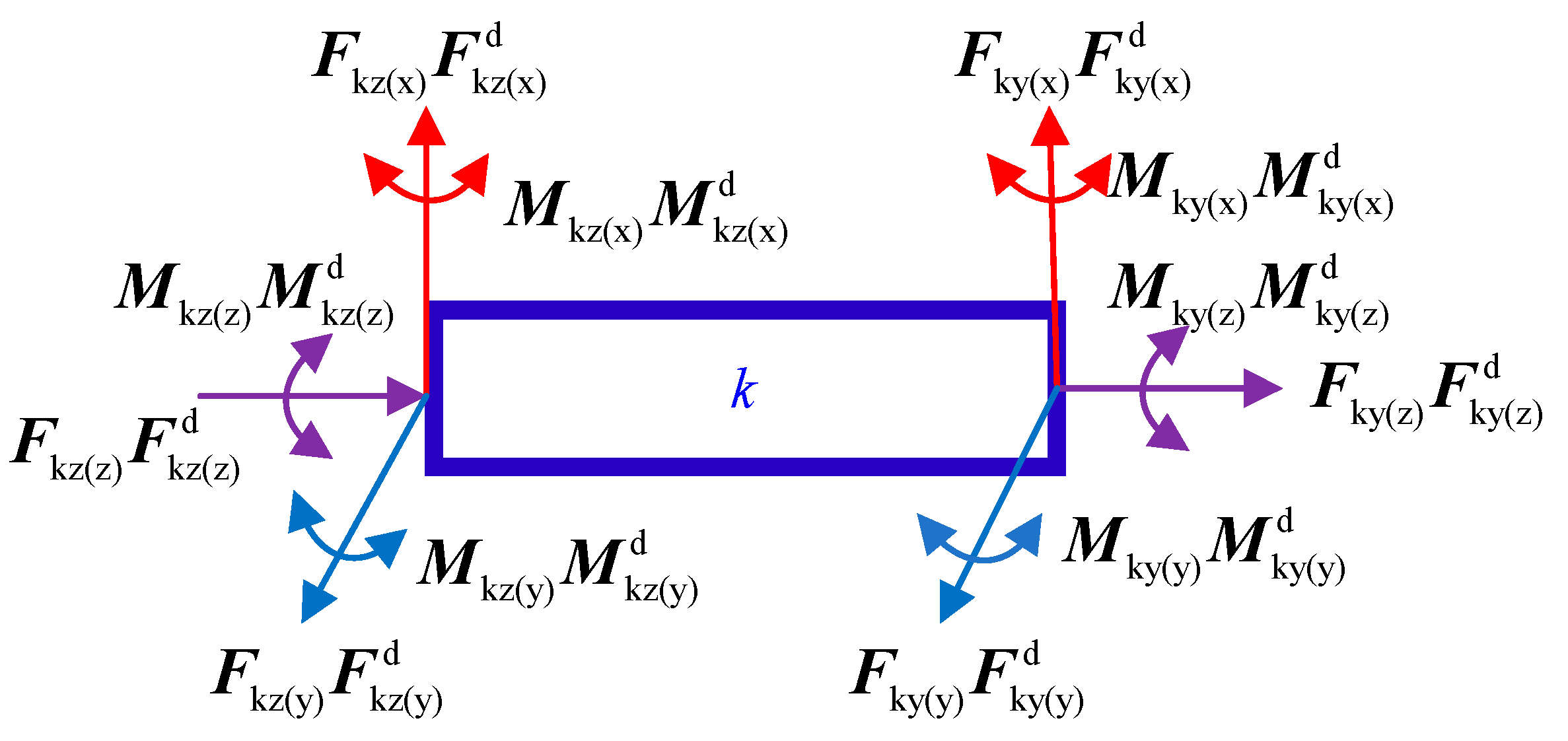
4.3. Equivalent Active Force and Equivalent Inertia Force
- Fkz—the elastic force on the left side,
- Mkz—the elastic torque on the left side,
- Fky—the elastic force on the right side,
- Mky—the elastic torque on the right side,
- K1—the elastic coefficient matrix of the left linear damper,
- K2—the elastic coefficient matrix of the left rotary damper,
- K3—the elastic coefficient matrix of the right linear damper, and
- K4—the elastic coefficient matrix of the right rotary damper.
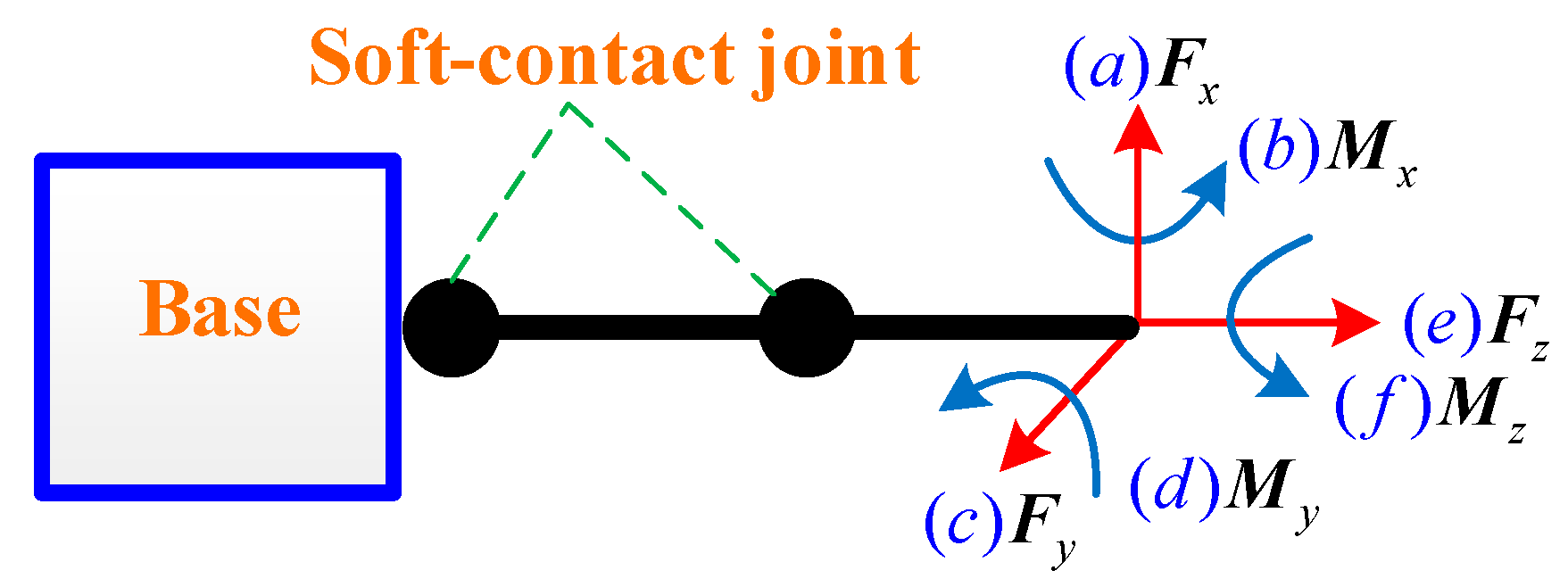
- F—instantaneous impact force at the end of manipulator, and
- M—instantaneous impact torque at the end of manipulator.
- mk—mass of the kth segment,Ik—inertia tensor of the kth segment,
- —angular acceleration of the kth segment,
- akc—acceleration of the centroid of the kth segment, and
- ωk—angular velocity of the kth segment.
4.4. Dynamic Equations
- η = 1, 2, 3, …, 6N + 6;
5. Instance Simulation
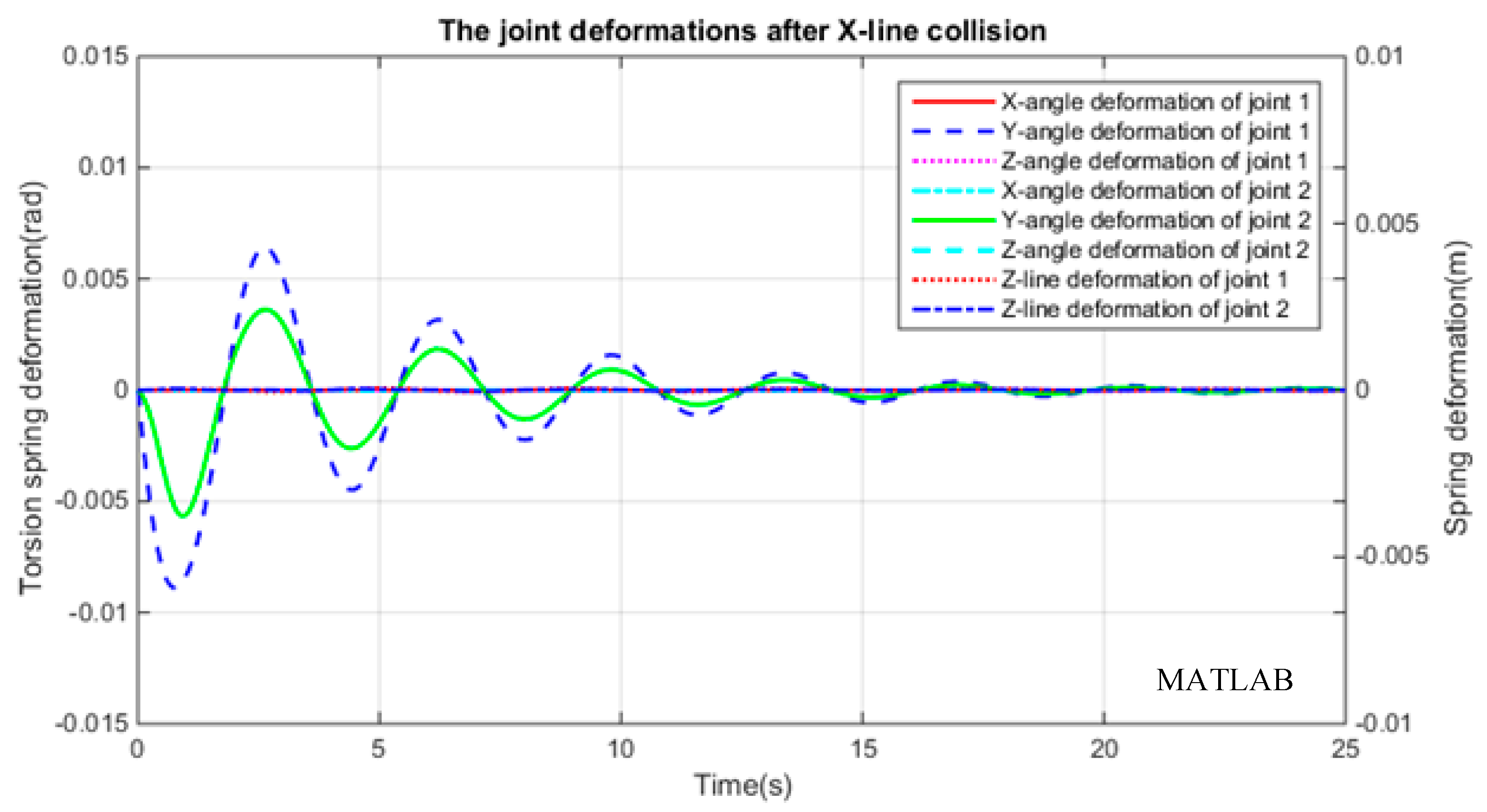
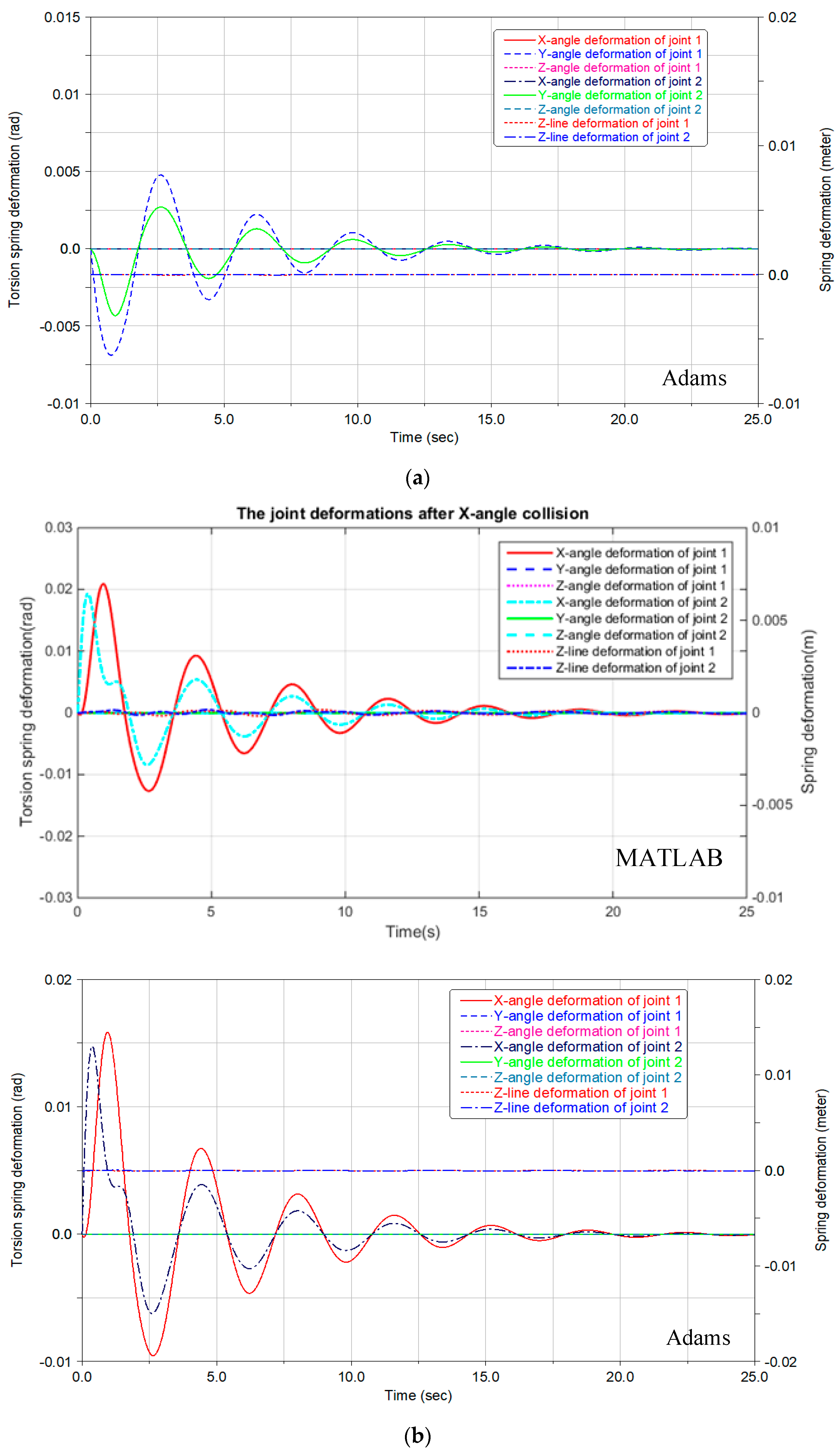
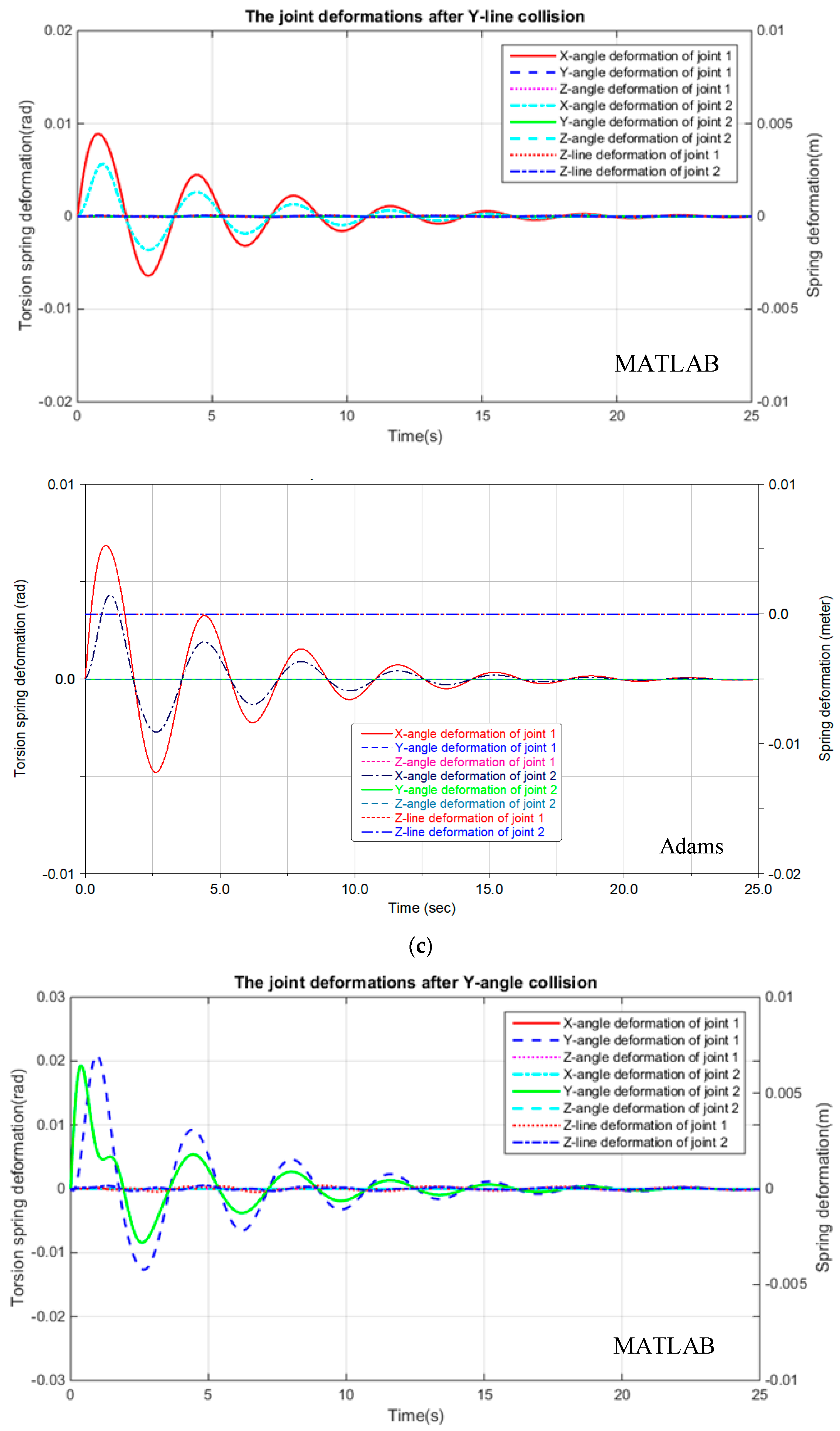
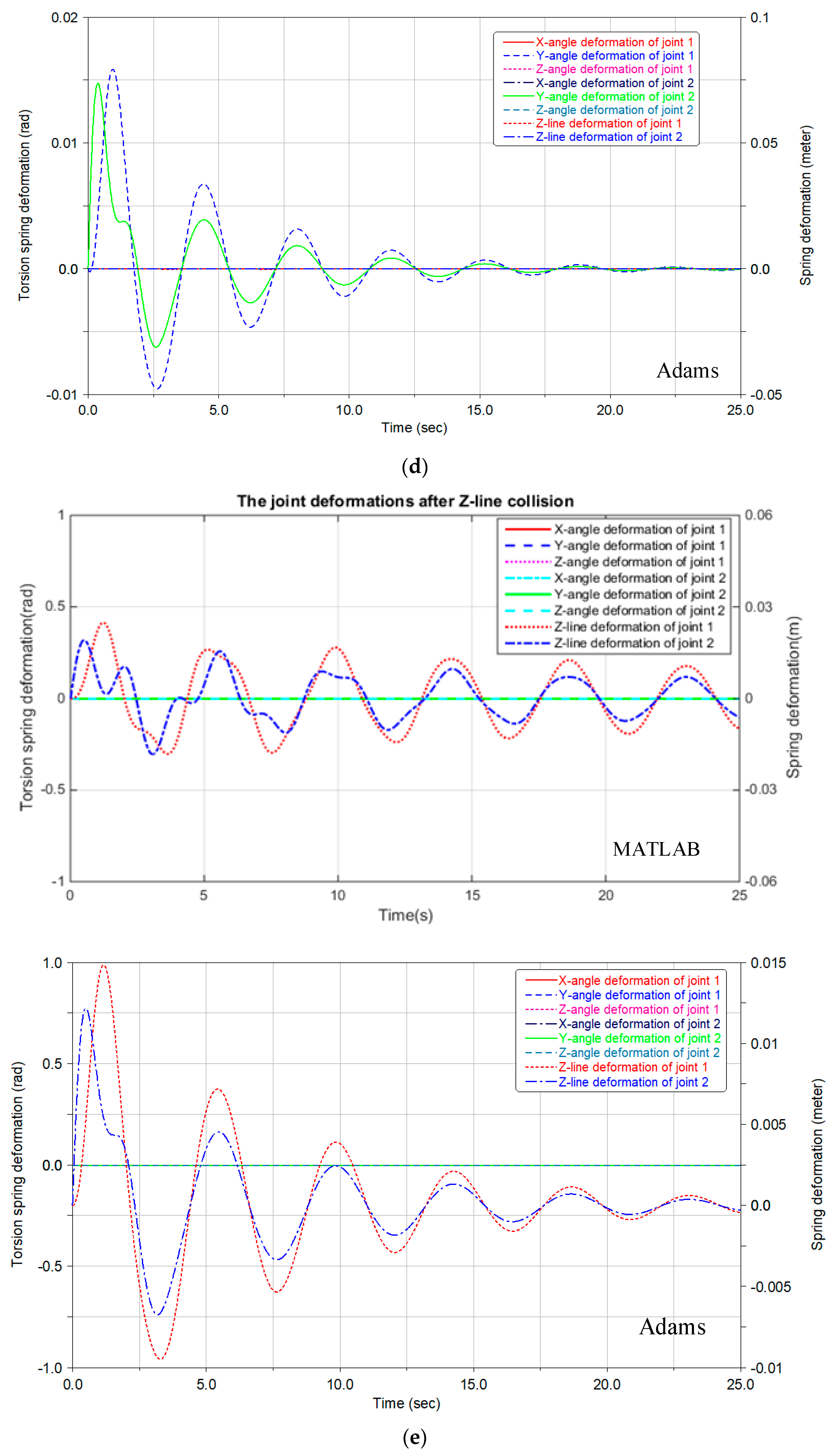
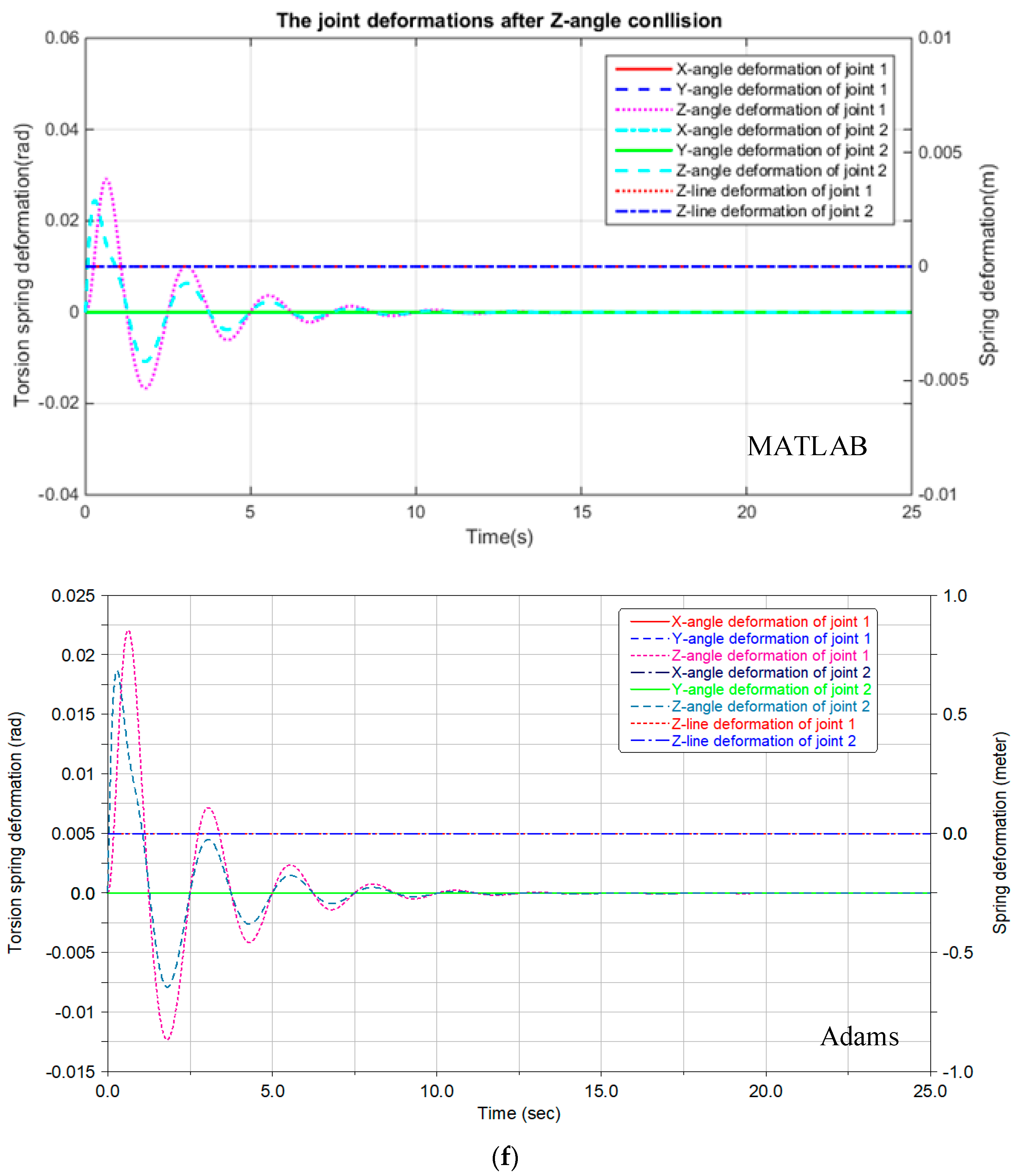
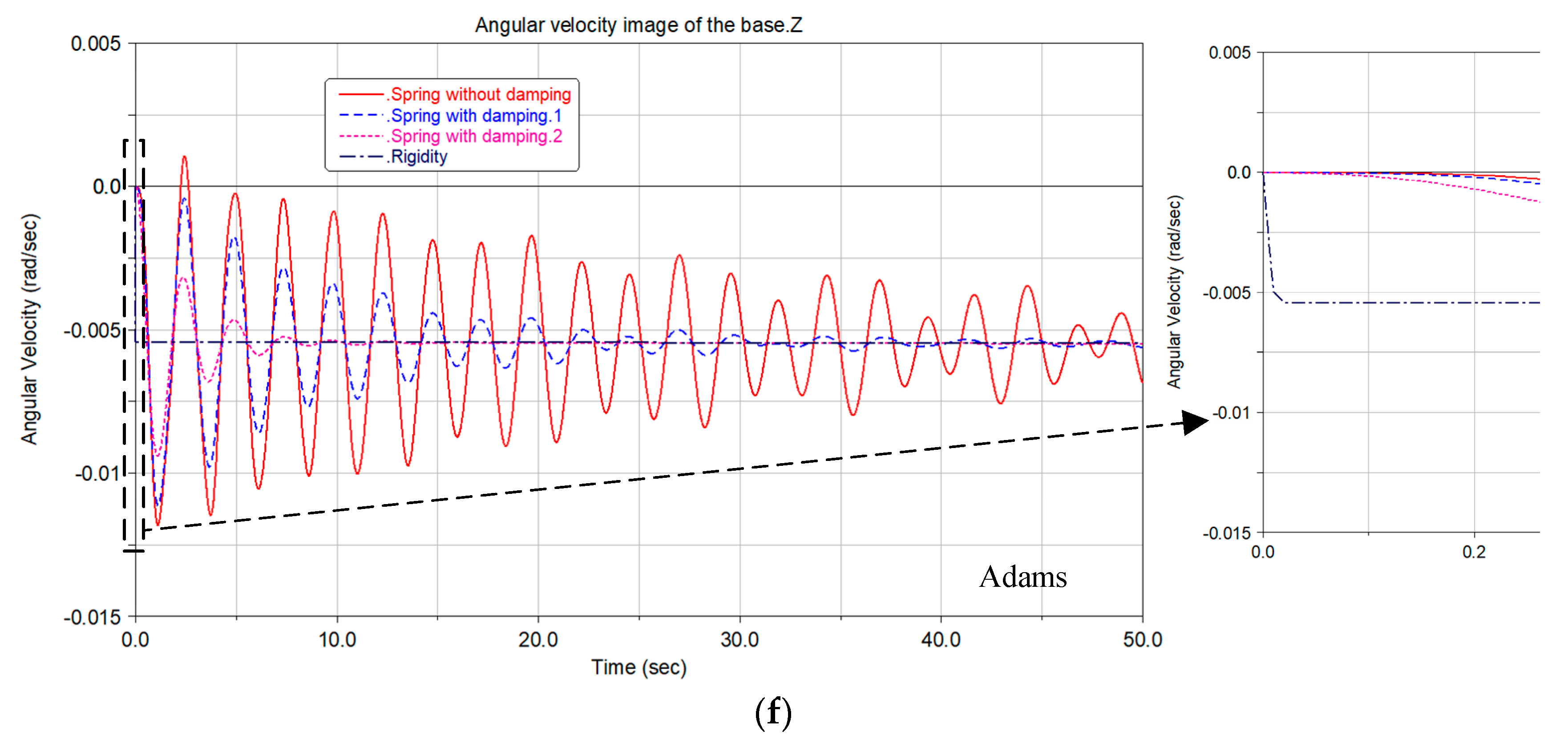
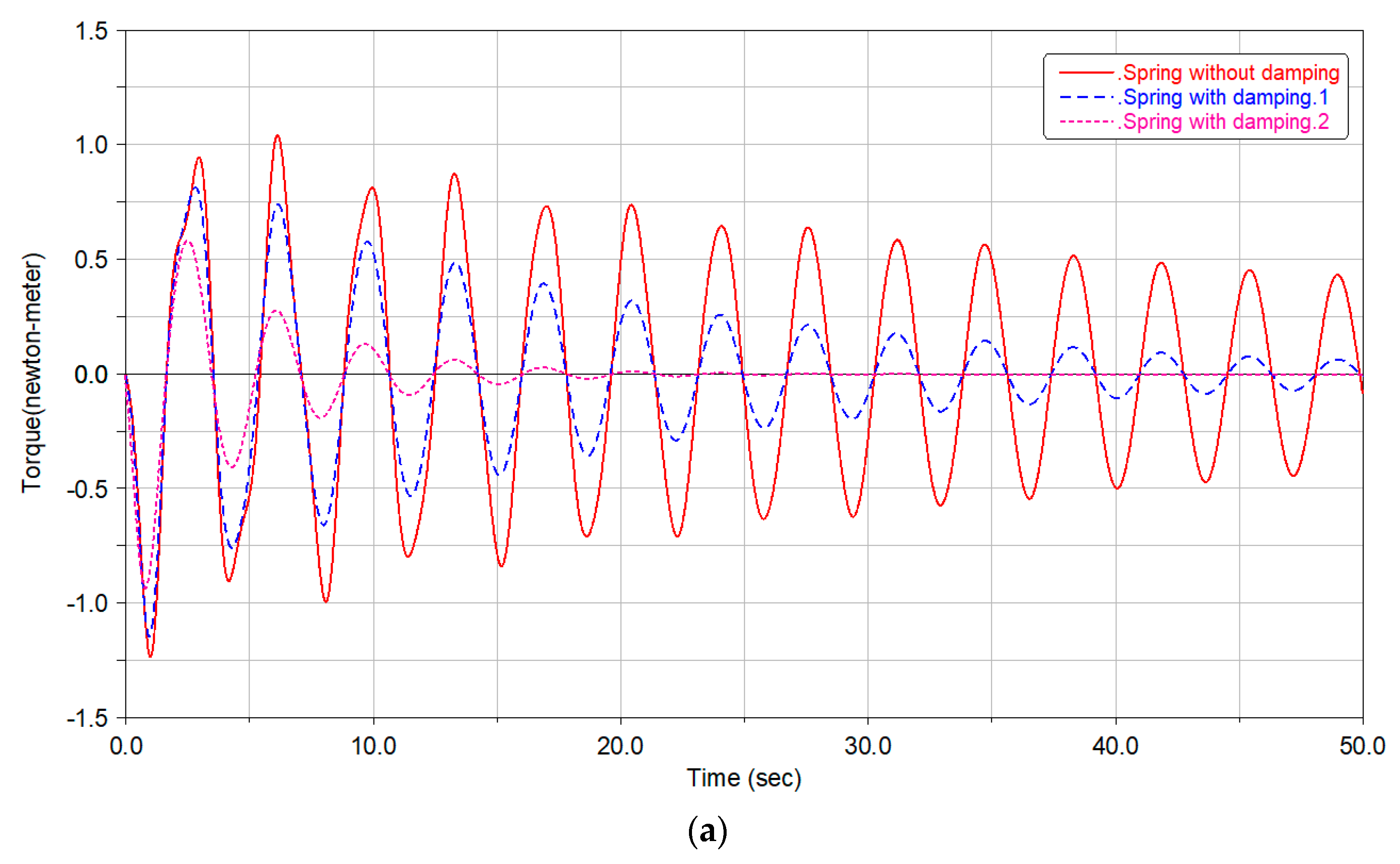
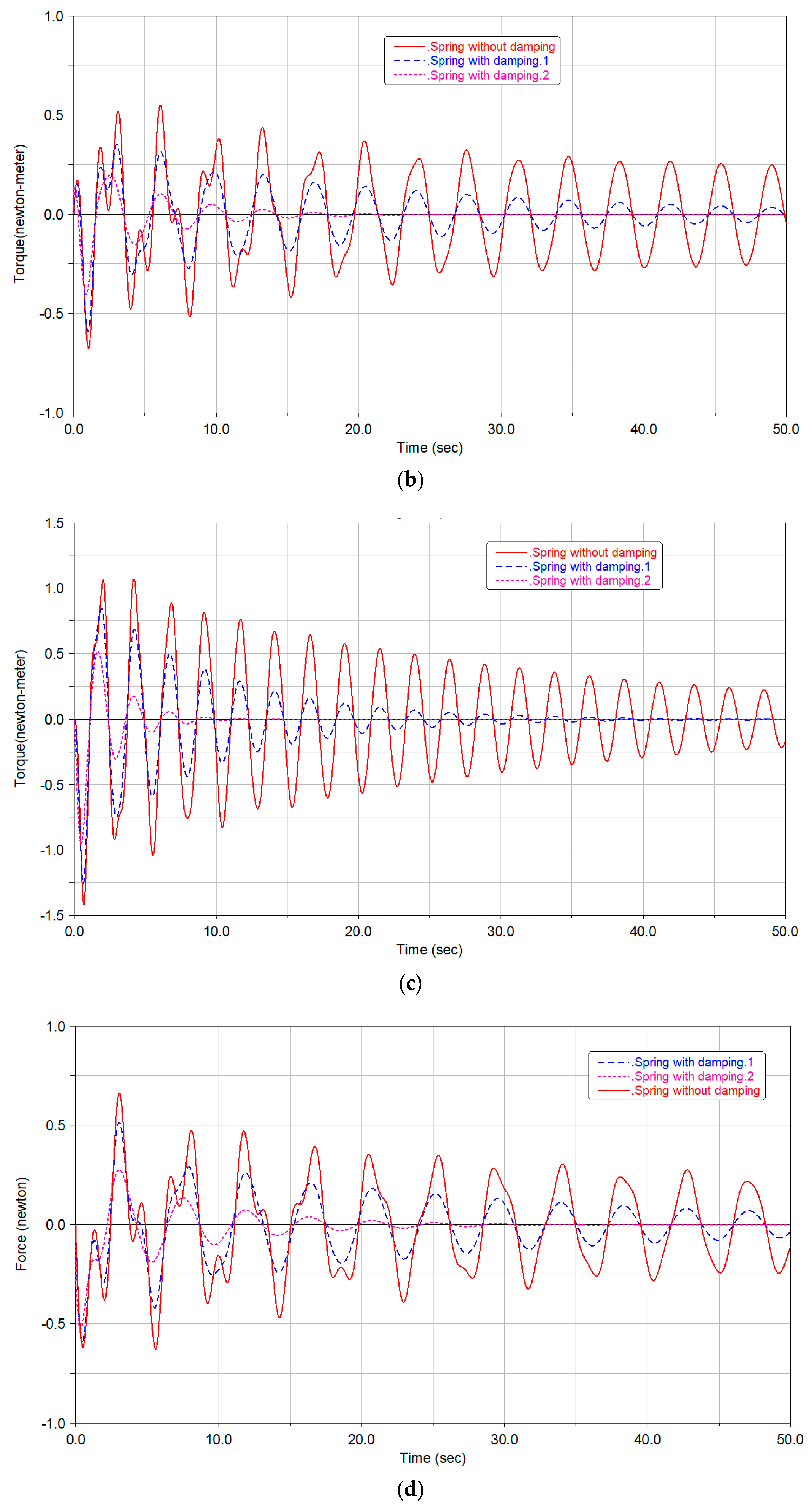
5.1. Single-Dimensional Collision
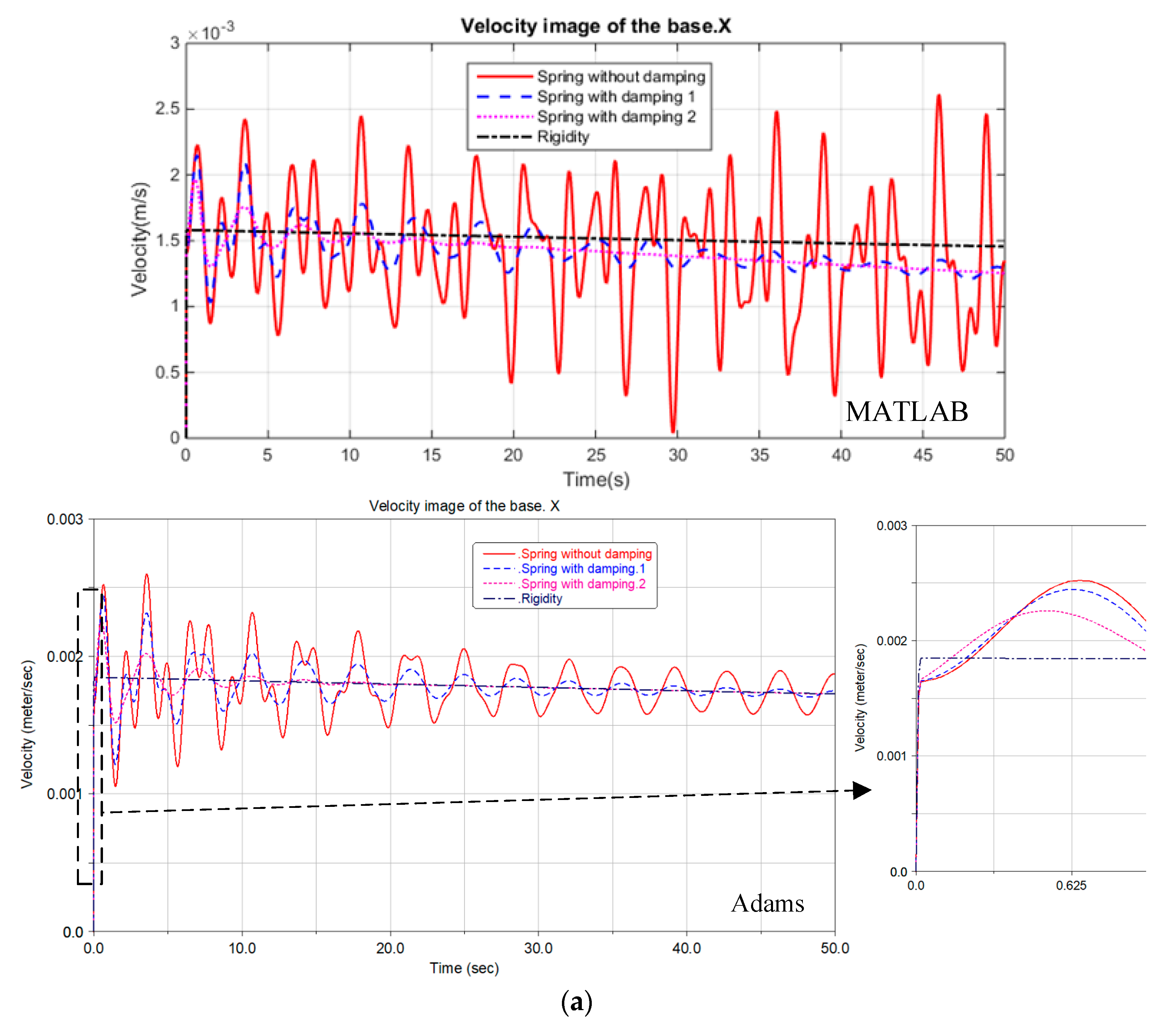
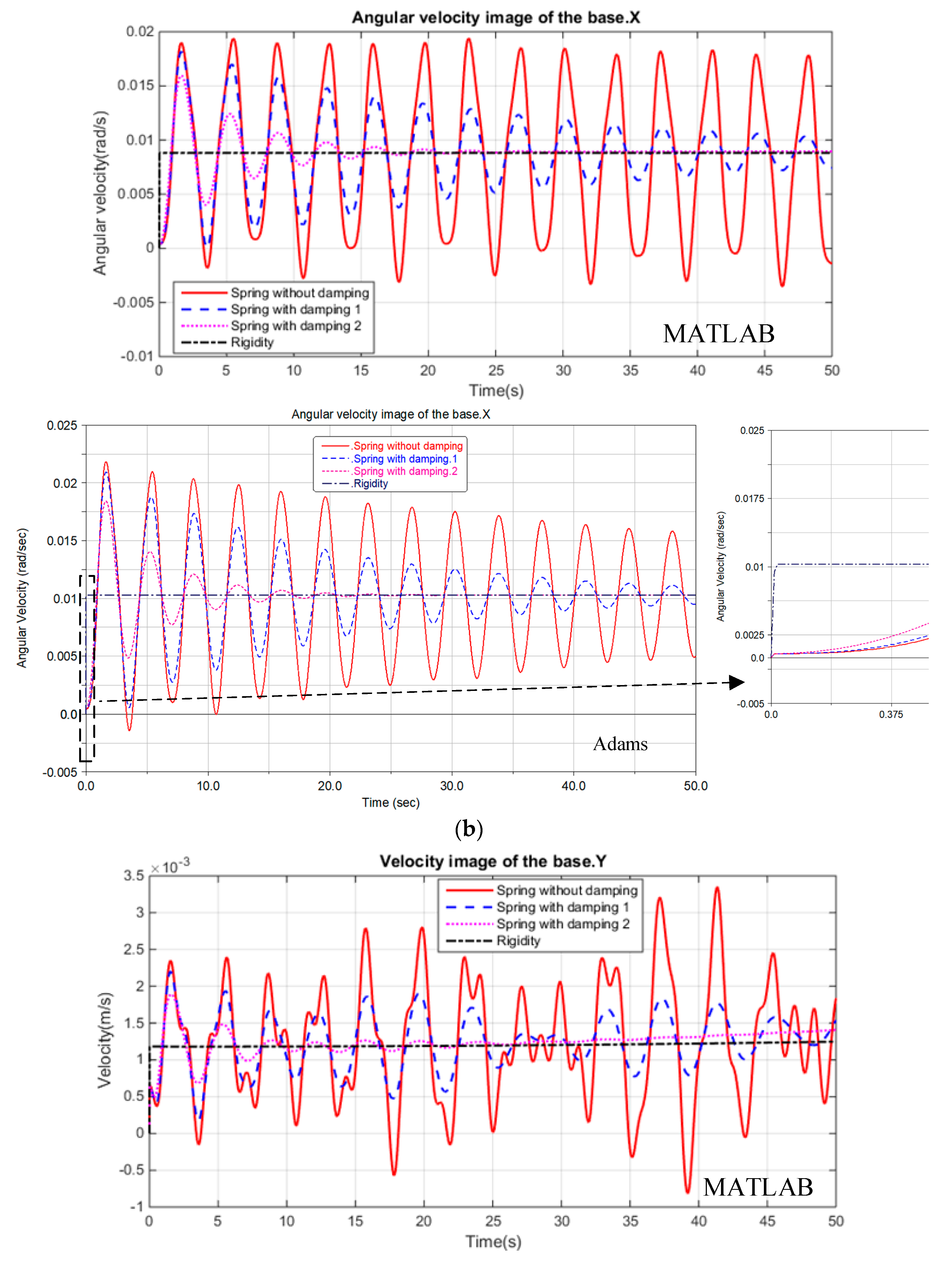
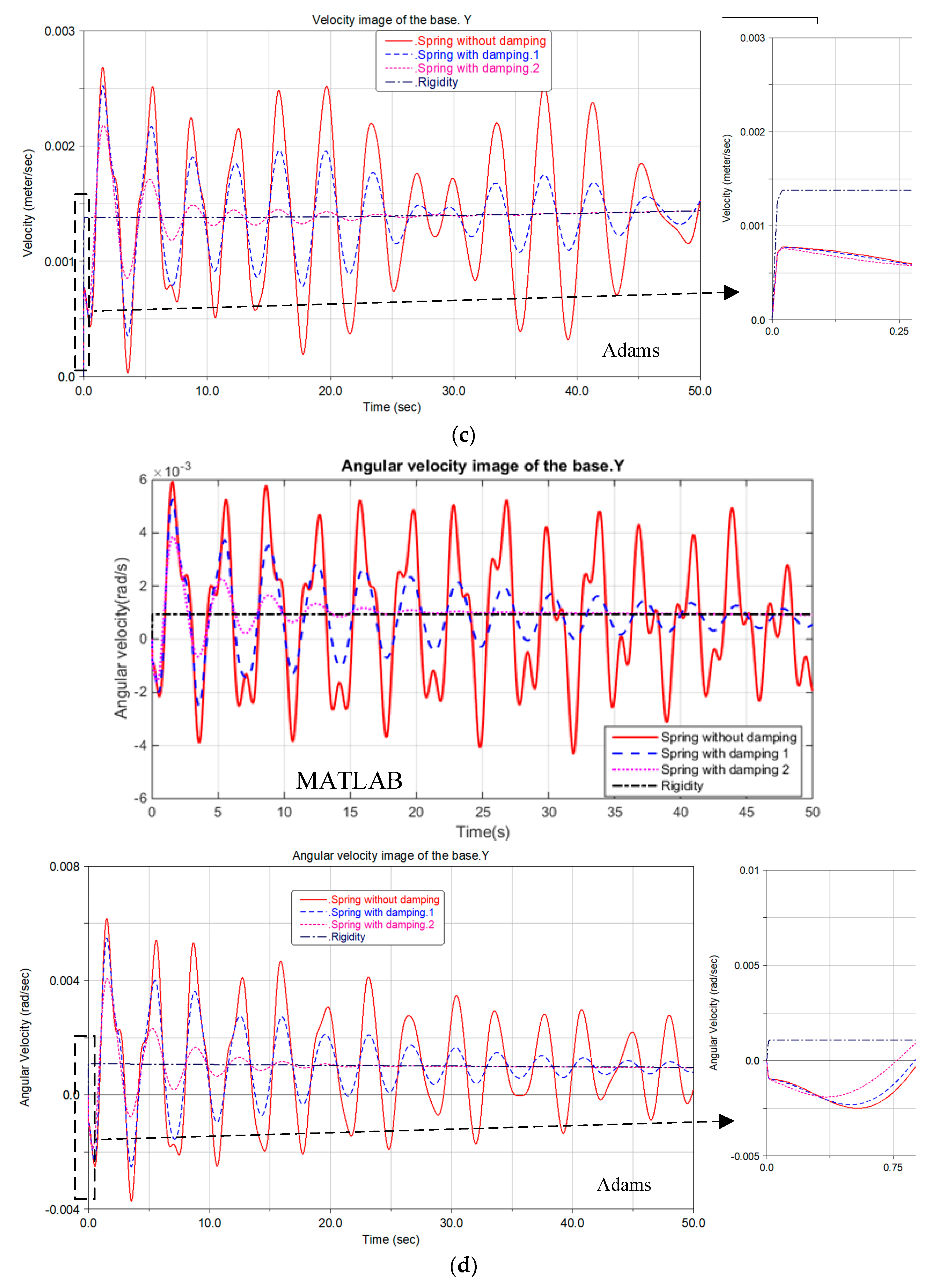
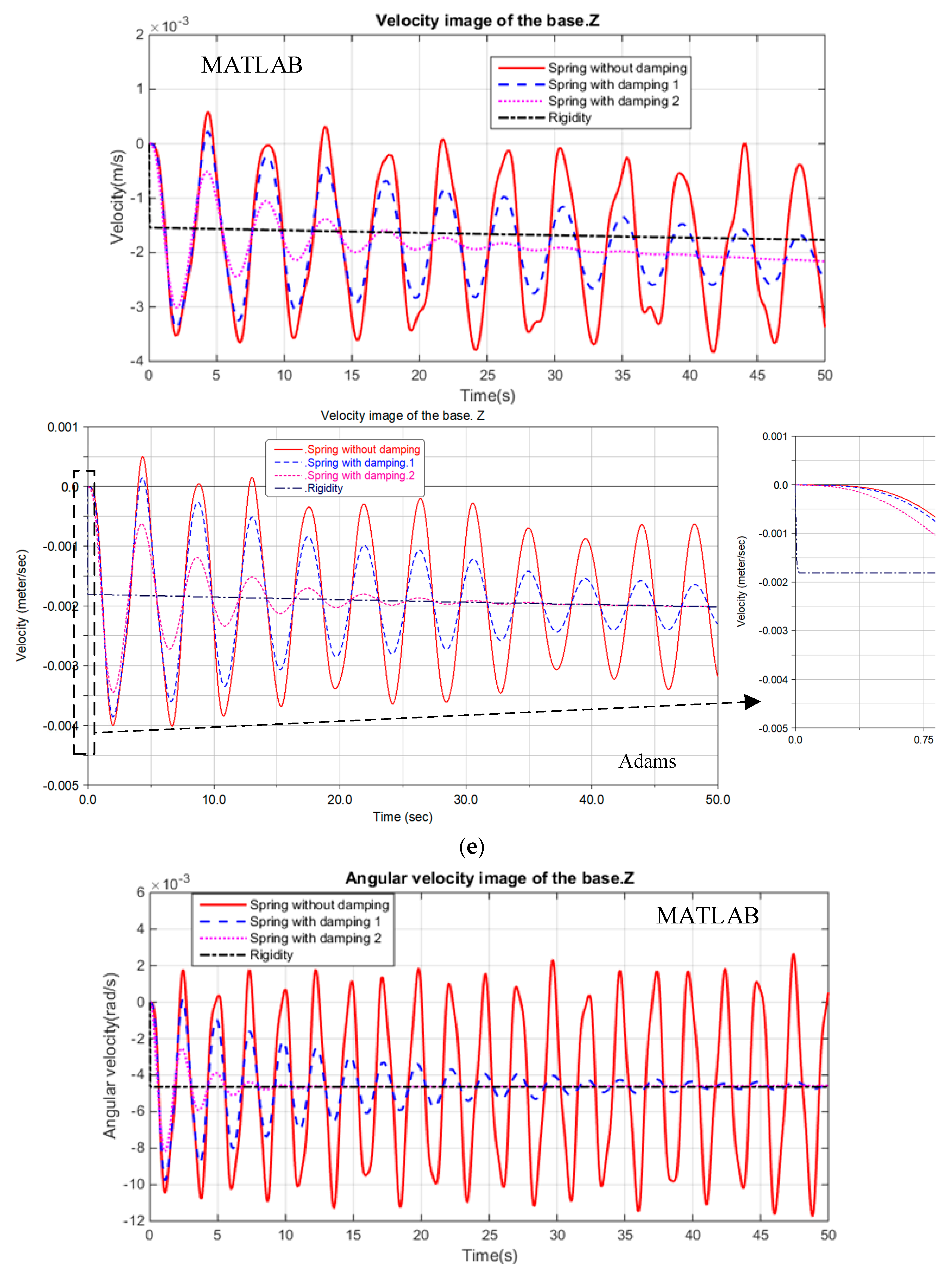
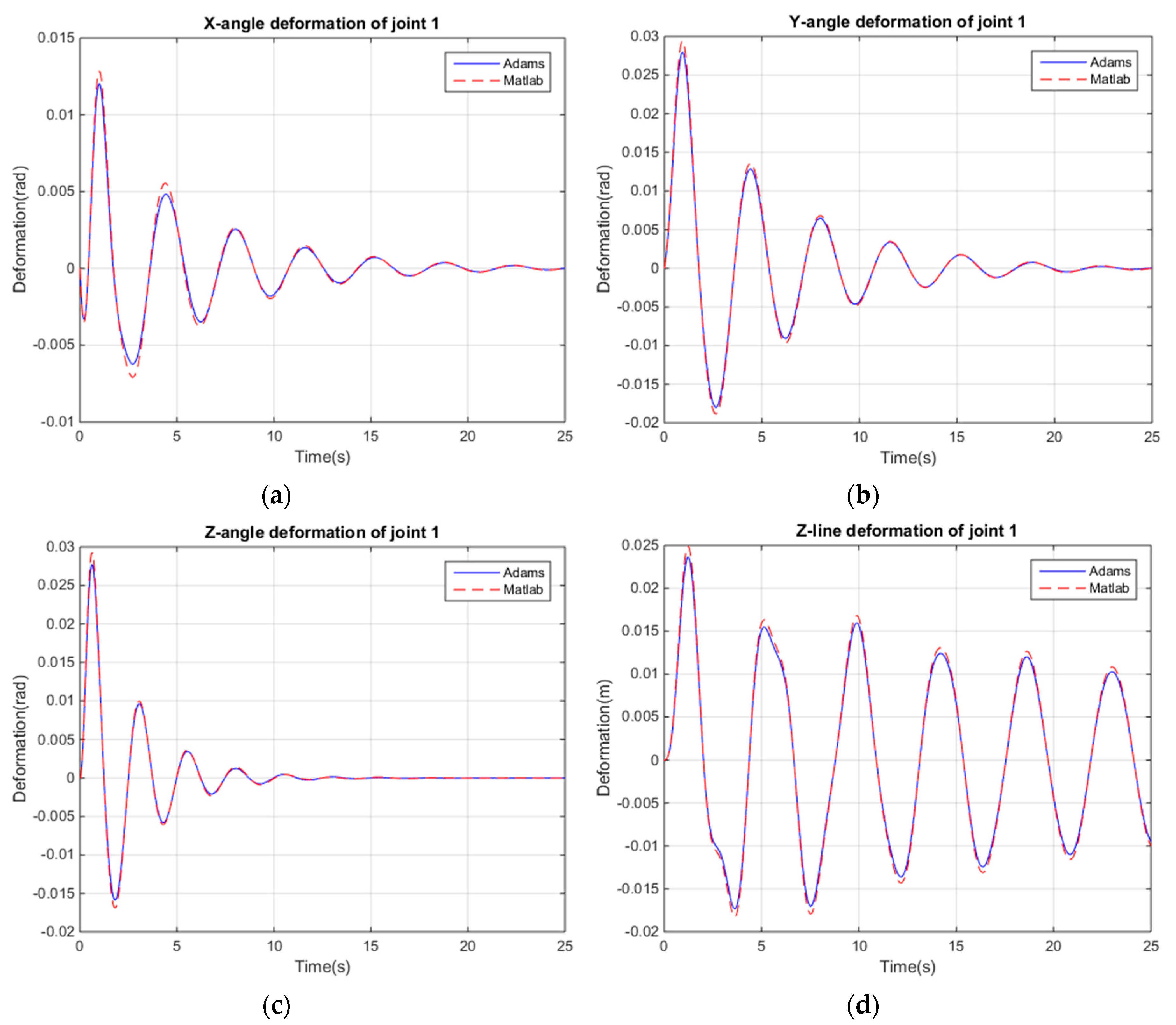
5.2. Spatially Six-Dimensional Collision
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Pairot, J.M.; Frezet, M.; Tailhades, J. European rendezvous and docking system. Acta Astronaut. 1992, 28, 31–42. [Google Scholar] [CrossRef]
- Feng, F.; Liu, Y.W.; Liu, H.; Cai, H.G. Development of space end-effector with capabilities of misalignment tolerance and soft capture based on tendon–sheath transmission system. J. Cent. South. Univ. 2013, 20, 3015–3030. [Google Scholar] [CrossRef]
- Olivieri, L.; Francesconi, A. Design and test of a semiandrogynous docking mechanism for small satellites. Acta Astronaut. 2016, 122, 219–230. [Google Scholar] [CrossRef]
- Boesso, A.; Francesconi, A. ARCADE small–scale docking mechanism for micro–satellites. Acta Astronaut. 2013, 86, 77–87. [Google Scholar] [CrossRef]
- Barbetta, M.; Boesso, A.; Branz, F.; Carron, A.; Olivieri, L.; Prendin, J.; Rodeghiero, G.; Sansone, F.; Savioli, L.; Spinello, F.; et al. ARCADE-R2 experiment on board BEXUS 17 stratospheric balloon. CEAS Space J. 2015, 7, 347–358. [Google Scholar] [CrossRef]
- Liu, Y.; Yao, Y.A.; He, Y.Y. Design and research of topological 3–RSR polyhedron docking mechanism. Manned Spacefl. 2018, 24, 61–66. [Google Scholar]
- Zhang, X.; Huang, Y.Y.; Chen, X.Q. Analysis and design of parameters in soft docking of micro/small satellites. Sciece China (Inf. Sci.) 2017, 5, 51–64. [Google Scholar] [CrossRef]
- Li, L.Q.; Shao, G.B.; Zhou, D.K.; Wang, J.X. Design and analysis of a long–stroke and miniaturized docking mechanism. Manned Spacefl. 2016, 22, 758–765. [Google Scholar]
- Liu, X.; Lu, Y.; Zhou, Y.; Yin, Y.H. Prospects of using a permanent magnetic end effector to despin and detumble an uncooperative target. Adv. Space Res. 2018, 61, 2147–2158. [Google Scholar] [CrossRef]
- Yoshida, K.; Sashida, N.; Kurazume, R.; Umetani, Y. Modeling of collision dynamics for space free-floating links with extended generalized inertia tensor. In Proceedings of the 1992 IEEE International Conference on Robotics and Automation, Nice, France, 12–14 May1992; pp. 899–904. [Google Scholar]
- Yoshida, K.; Sashida, N. Modeling of impact dynamics and impulse minimization for space robots. In Proceedings of the 1993 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS ’93), Yokohama, Japan, 26–30 July 1993; pp. 2064–2069. [Google Scholar]
- Wee, L.B.; Walker, M.W. On the dynamics of contact between space robots and configuration control for impact minimization. IEEE Trans. Robot. Autom. 1993, 9, 581–591. [Google Scholar]
- Nenchev, D.N.; Yoshida, K.; Vichitkulsawat, P.; Uchiyama, M. Reaction null–space control of flexible structure mounted manipulator systems. IEEE Trans. Robot. Autom. 1999, 15, 1011–1023. [Google Scholar] [CrossRef] [Green Version]
- Nenchev, D.N.; Yoshida, K. Impact analysis and post–impact motion control issues of a free–floating space robot subject to a force impulse. IEEE Trans. Robot. Autom. 1999, 15, 548–557. [Google Scholar] [CrossRef]
- Cong, P.C.; Zhang, X. Preimpact configuration analysis of a dual–arm space manipulator with a prismatic joint for capturing an object. Robotica 2013, 31, 853–860. [Google Scholar] [CrossRef]
- Oki, T.; Nakanishi, H.; Yoshida, K. Time-optimal manipulator control for management of angular momentum distribution during the capture of a tumbling target. Adv. Robot. 2010, 24, 441–466. [Google Scholar] [CrossRef]
- Guo, W.H.; Wang, T.S. Pre-impact configuration optimization for a space robot capturing target satellite. J. Astronaut. 2015, 36, 390–396. [Google Scholar]
- Chen, X.; Qin, S. Motion Planning for dual-arm space robot towards capturing target satellite and keeping the base inertially fixed. IEEE Access 2018, 6, 26292–26306. [Google Scholar] [CrossRef]
- Xu, W.; Yan, L.; Hu, Z.; Liang, B. Area-oriented coordinated trajectory planning of dual-arm space robot for capturing a tumbling target. Chin. J. Aeronaut. 2019, 32, 2151–2163. [Google Scholar] [CrossRef]
- Yu, Z.W.; Cai, G.P. Robust adaptive control of a 6-DOF space robot with flexible panels. Int. J. Dyn. Control 2019, 7, 1370–1378. [Google Scholar] [CrossRef]
- Xu, W.L.; Yue, S. Pre–posed configuration of flexible redundant robot manipulators for impact vibration alleviating. IEEE Trans. Ind. Electron. 2004, 51, 195–200. [Google Scholar] [CrossRef]
- Larouche, B.P.; Zhu, Z.H. Autonomous robotic capture of non–cooperative target using visual servoing and motion predictive control. Auton. Robot. 2014, 37, 157–167. [Google Scholar] [CrossRef]
- McCourt, R.A.; de Silva, C.W. Autonomous robotic capture of a satellite using constrained predictive control. IEEE–ASME Trans. Mechatron. 2006, 11, 699–708. [Google Scholar] [CrossRef]
- Zhang, L.; Jia, Q.X.; Chen, G. Pre–impact trajectory planning for minimizing base attitude disturbance in space manipulator systems for a capture task. Chin. J. Aeronaut. 2015, 28, 1199–1208. [Google Scholar] [CrossRef] [Green Version]
- Chu, M.; Wu, X.Y. Modeling and self–learning soft–grasp control for free–floating space manipulator during target capturing using variable stiffness method. IEEE Access 2018, 6, 7044–7054. [Google Scholar] [CrossRef]
- Nguyen, H.; Thai, C.; Sharf, I. Capture of spinning target with space manipulator using magneto rheological damper. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Toronto, ON, Canada, 2–5 August 2010; pp. 1–12. [Google Scholar]
- Balamurugan, L.; Jancirani, J.; Eltantawie, M.A. Generalized magnetorheological (MR) damper model and its application in semi–active control of vehicle suspension system. Int. J. Automot. Technol. 2014, 15, 419–427. [Google Scholar] [CrossRef]
- Yu, Z.W.; Liu, X.F.; Cai, G.P. Dynamics modeling and control of a 6-DOF space robot with flexible panels for capturing a free floating target. Acta Astronaut. 2016, 128, 560–572. [Google Scholar]
- Bian, Y.S.; Gao, Z.H. Nonlinear vibration absorption for a flexible arm via a virtual vibration absorber. J. Sound Vib. 2017, 399, 197–215. [Google Scholar] [CrossRef]
- Bian, Y.S.; Gao, Z.H.; Lv, X.; Fan, M. Theoretical and experimental study on vibration control of flexible manipulator based on internal resonance. J. Vib. Control 2018, 24, 3321–3337. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Parameter |
|---|---|
| 1# | 1.0 N·s·m−1(N·s·rad−1) |
| 2# | 5.0 N·s·m−1(N·s·rad−1) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Xu, S.; Jia, C.; Wang, G.; Chu, M. Generalized Modeling of Soft-Capture Manipulator with Novel Soft-Contact Joints. Energies 2020, 13, 1530. https://doi.org/10.3390/en13061530
Zhang X, Xu S, Jia C, Wang G, Chu M. Generalized Modeling of Soft-Capture Manipulator with Novel Soft-Contact Joints. Energies. 2020; 13(6):1530. https://doi.org/10.3390/en13061530
Chicago/Turabian StyleZhang, Xiaodong, Sheng Xu, Chen Jia, Gang Wang, and Ming Chu. 2020. "Generalized Modeling of Soft-Capture Manipulator with Novel Soft-Contact Joints" Energies 13, no. 6: 1530. https://doi.org/10.3390/en13061530
APA StyleZhang, X., Xu, S., Jia, C., Wang, G., & Chu, M. (2020). Generalized Modeling of Soft-Capture Manipulator with Novel Soft-Contact Joints. Energies, 13(6), 1530. https://doi.org/10.3390/en13061530