An Improved Stability Criterion for Load Frequency Control of Power Systems with Time-Varying Delays



Abstract
:
1. Introduction
2. Models of LFC Schemes Considering the Time-Varying Communication Delays
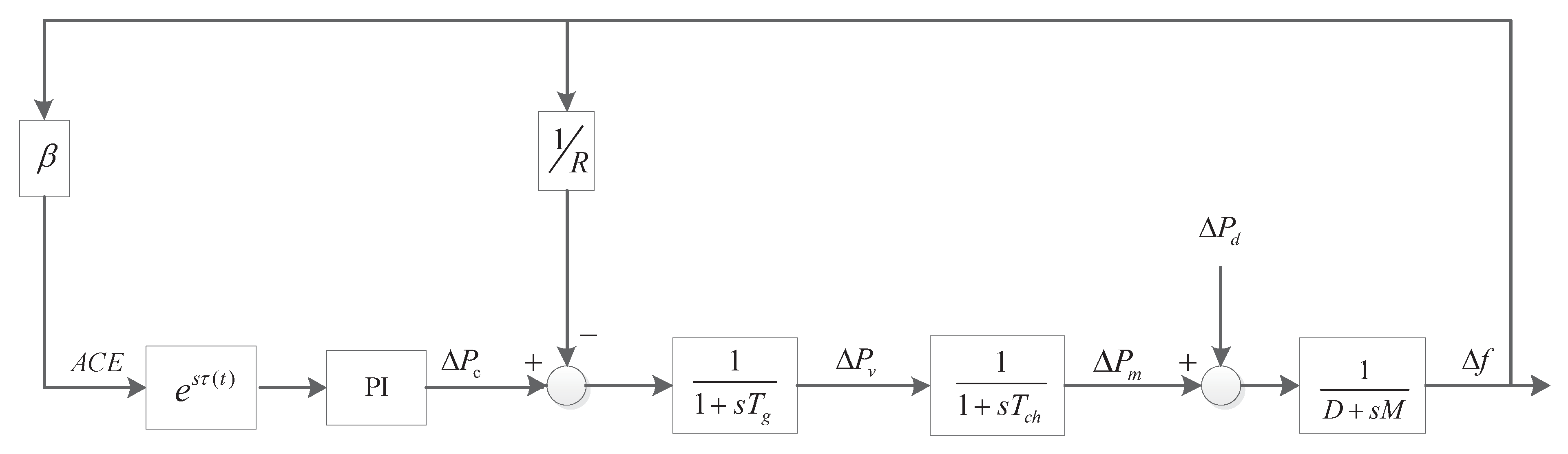
2.1. One-Area LFC Scheme
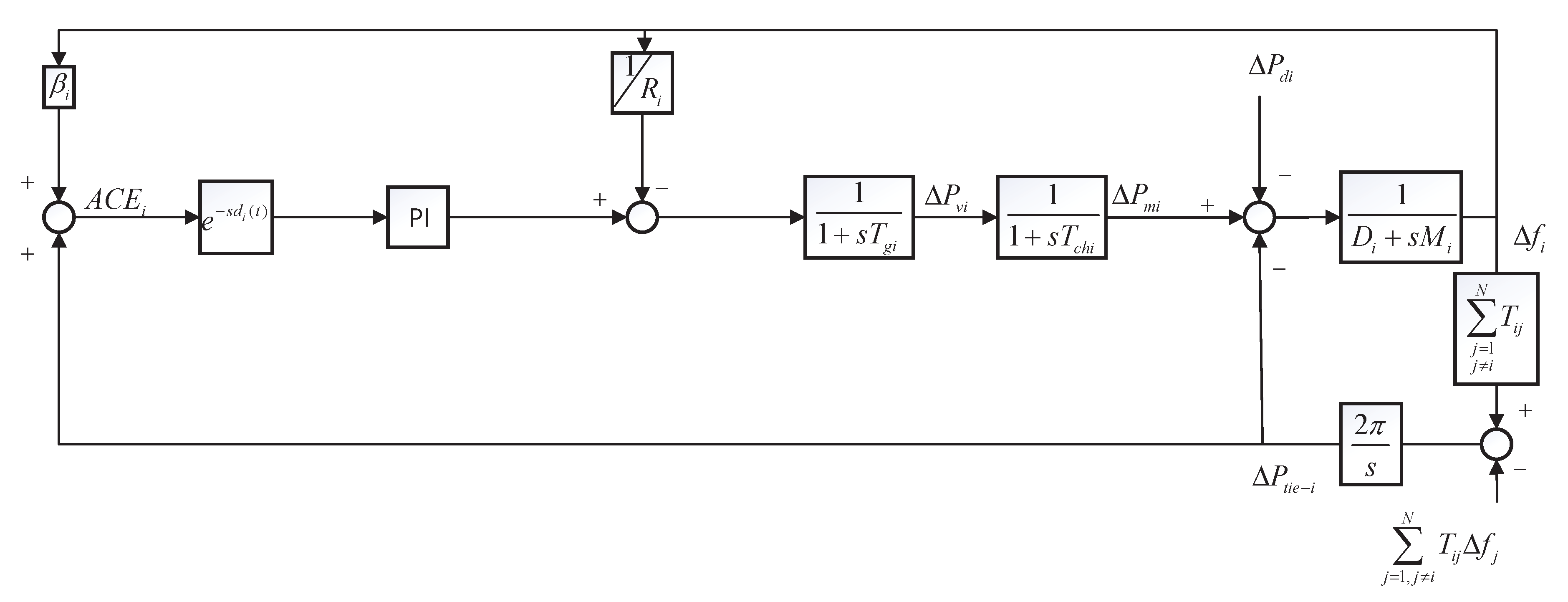
2.2. Multi-Area LFC Scheme
3. Method of Stability Assessment Based on a New Criterion
3.1. A New Criterion
- 1.
- ;
- 2.
- ;
- 3.
- .
3.2. Steps of the Method
4. Case Studies
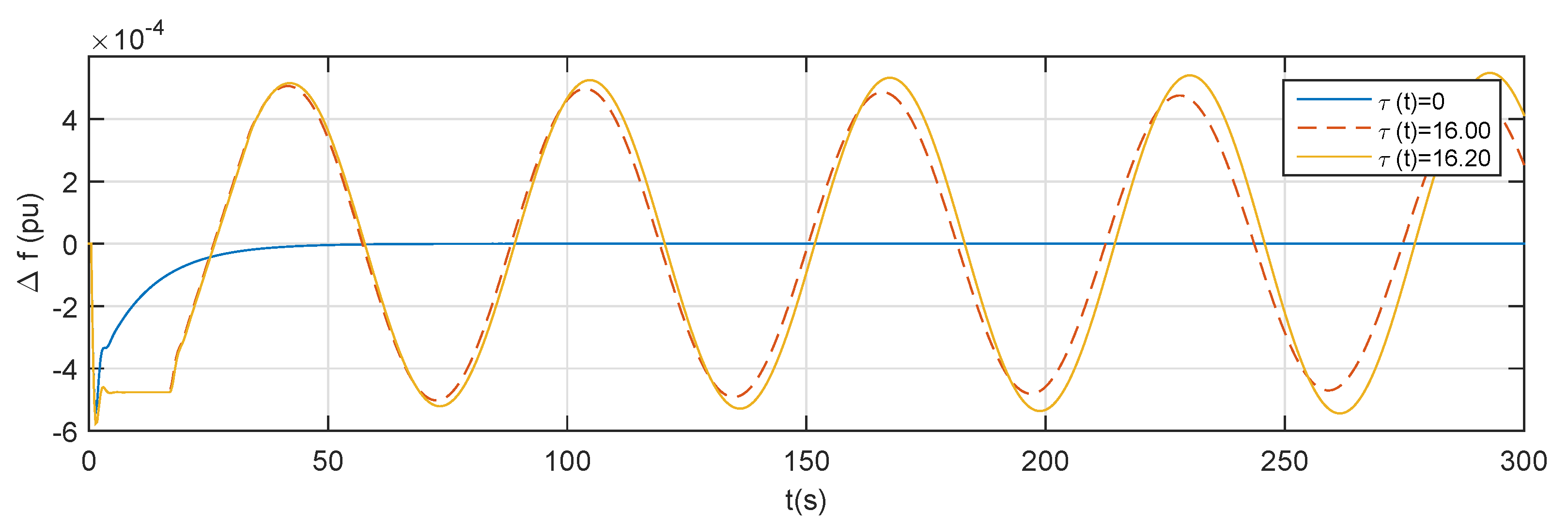
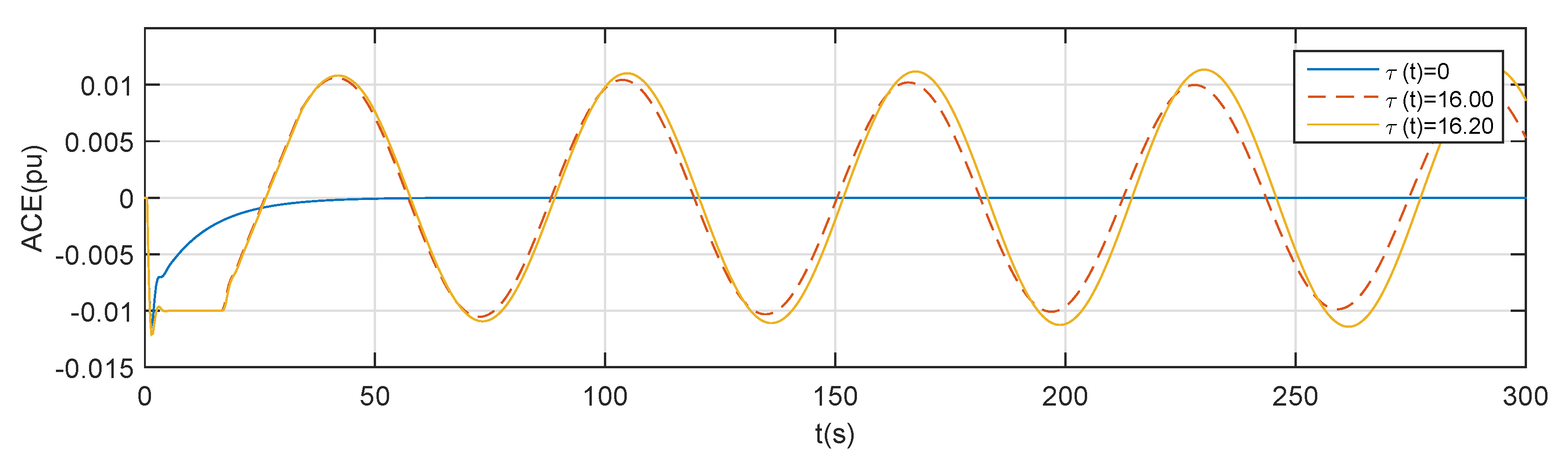
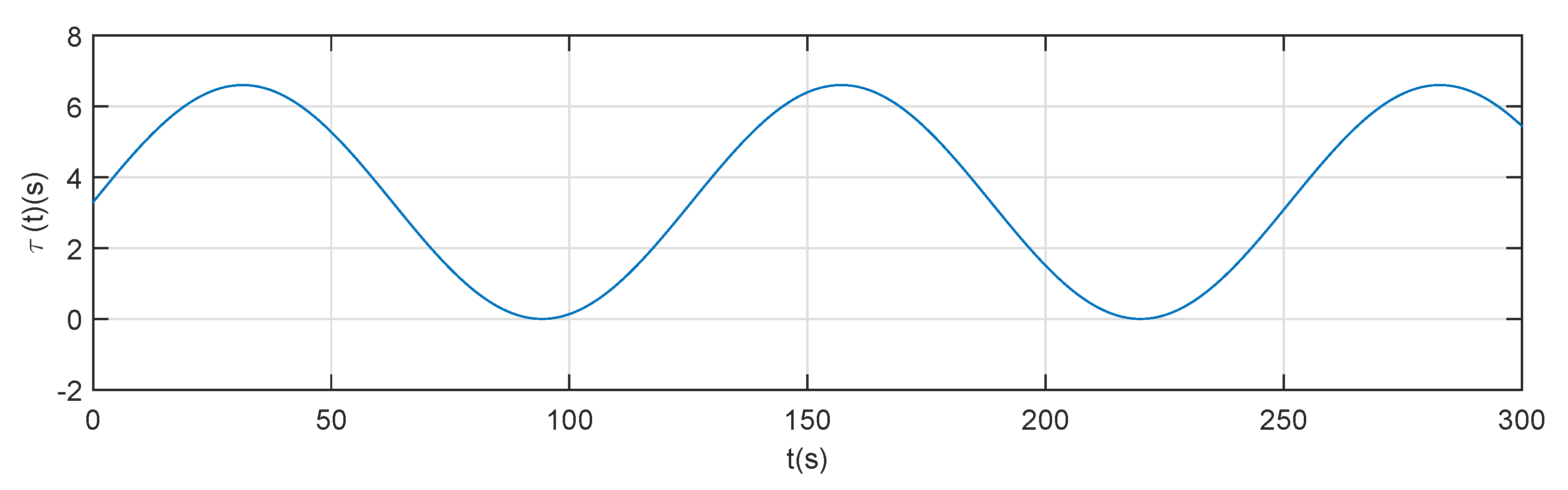
4.1. The Case of a One-Area System
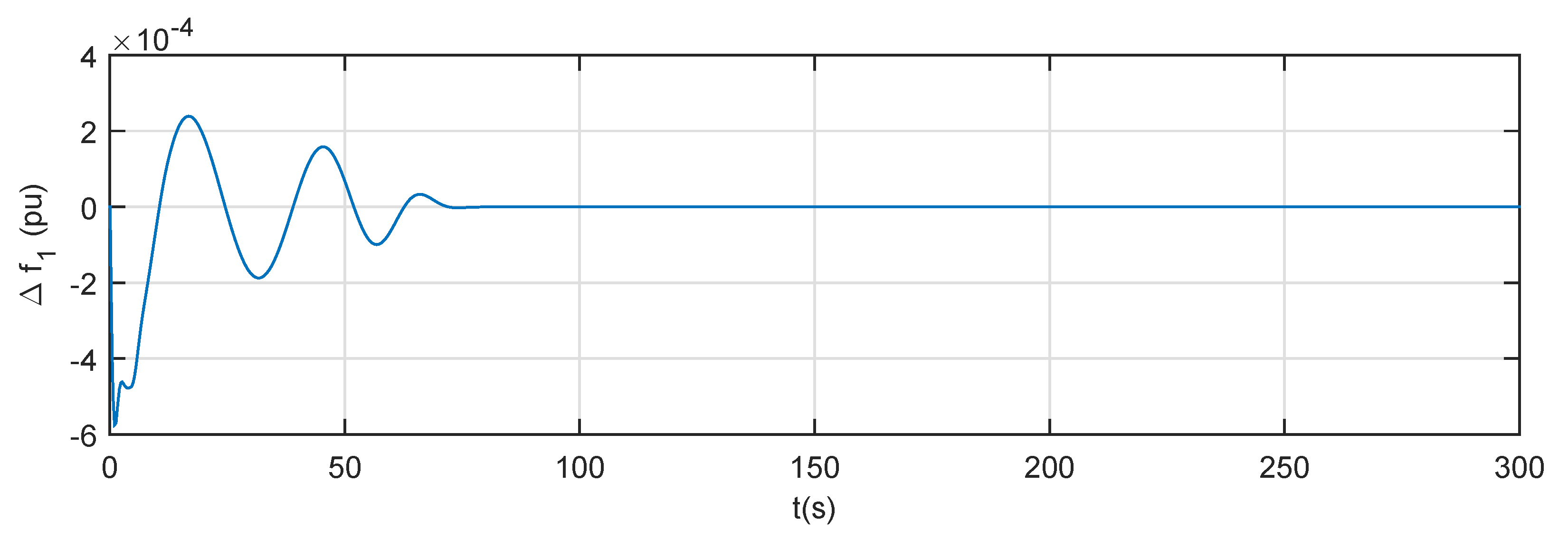
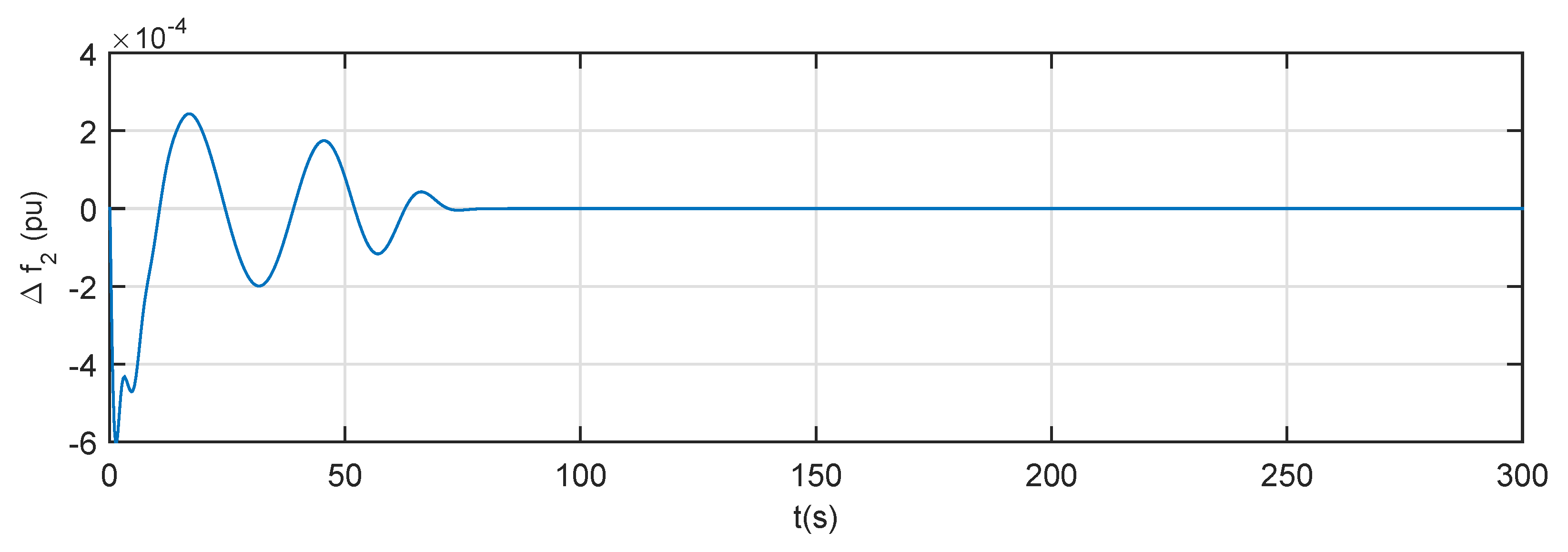
4.2. The Case of a Two-Area System
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kundur, P. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Bevrani, H. Robust Power System Frequency Control; Springer: New York, NY, USA, 2009. [Google Scholar]
- Khalil, A.; Peng, A.S. A new method for computing the delay margin for the stability of load frequency control systems. Energies 2018, 11, 3460. [Google Scholar] [CrossRef] [Green Version]
- Alhelou, H.H.; Hamedani-Golshan, M.E.; Zamani, R.; Heydarian-Forushani, E.; Siano, P. Challenges and opportunities of load frequency control in conventional, modern and future smart power systems: A comprehensive review. Energies 2018, 11, 2497. [Google Scholar] [CrossRef] [Green Version]
- Bhowmik, S.; Tomsovic, K.; Bose, A. Communication models for third party load frequency control. IEEE Trans. Power Syst. 2004, 19, 543–548. [Google Scholar] [CrossRef]
- Khalil, A.; Peng, A.S. An Accurate Method for Delay Margin Computation for Power System Stability. Energies 2018, 11, 3466. [Google Scholar] [CrossRef] [Green Version]
- Yao, W.; Jiang, L.; Wu, Q.H.; Wen, J.Y.; Cheng, S.J. Delay-dependent stability analysis of the power system with a wide-area damping controller embedded. IEEE Trans. Power Syst. 2011, 26, 233–240. [Google Scholar] [CrossRef]
- Jin, L.; Zhang, C.K.; He, Y.; Jiang, L.; Wu, M. Delay-Dependent Stability Analysis of Multi-Area Load Frequency Control with Enhanced Accuracy and Computation Efficiency. IEEE Trans. Power Syst. 2019, 34, 3687–3696. [Google Scholar] [CrossRef]
- Shangguan, X.C.; He, Y.; Zhang, C.K.; Jiang, L.; Spencer, J.; Wu, M. Sampled-data based discrete and fast load frequency control for power systems with wind power. Appl. Energy 2020, 259, 114202. [Google Scholar] [CrossRef]
- Sonmez, S.; Ayasun, S. Stability region in the parameter space of PI controller for a single-area load frequency control system with time delay. IEEE Trans. Power Syst. 2016, 31, 829–830. [Google Scholar] [CrossRef]
- Sonmez, S.; Ayasun, S.; Nwankpa, C.O. An exact method for computing delay margin for stability of load frequency control systems with constant communication delays. IEEE Trans. Power Syst. 2016, 31, 370–377. [Google Scholar] [CrossRef]
- Sonmez, S.; Ayasun, S. Gain and phase margins based delay-dependent stability analysis of single-area load frequency control system with constant communication time delay. Trans. Inst. Meas. Control 2018, 40, 1701–1710. [Google Scholar] [CrossRef]
- Zhang, C.K.; Jiang, L.; Wu, Q.H.; He, Y.; Wu, M. Delay-dependent robust load frequency control for time delay power systems. IEEE Trans. Power Syst. 2013, 28, 2192–2201. [Google Scholar] [CrossRef]
- Jiang, L.; Yao, W.; Wu, Q.H.; Wen, J.Y.; Cheng, S.J. Delay-dependent stability for load frequency controlwith constant and time-varying delays. IEEE Trans. Power Syst. 2012, 27, 932–941. [Google Scholar] [CrossRef]
- Zhang, C.K.; Jiang, L.; Wu, Q.H.; He, Y.; Wu, M. Further results on delay-dependent stability of multi-area load frequency control. IEEE Trans. Power Syst. 2013, 28, 4465–4474. [Google Scholar] [CrossRef]
- Ramakrishnan, K.; Ray, G. Journal of Control. Improved results on delay-dependent stability of LFC systems with multiple time-delays. J. Control Autom. Electr. Syst. 2015, 26, 235–240. [Google Scholar] [CrossRef]
- Peng, C.; Zhang, J. Delay-distribution-dependent load frequency control of power systems with probabilistic interval delays. IEEE Trans. Power Syst. 2016, 31, 3309–3317. [Google Scholar] [CrossRef]
- Krishnan, R.; Pragatheeswaran, J.K.; Ray, G. Robust stability of networked load frequency control systems with time-varying delays. Electr. Power Components Syst. 2017, 45, 302–314. [Google Scholar] [CrossRef]
- Li, X.; Wang, R.; Wu, S.N.; Dimirovski, G.M. Exponential stability for multi-area power systems with time delays under load frequency controller failures. Asian J. Control 2017, 19, 787–791. [Google Scholar] [CrossRef] [Green Version]
- Ramakrishnan, K.; Ray, G. Stability criteria for nonlinearly perturbed load frequency systems with time-delay. IEEE J. Emerg. Sel. Top. Circuits Syst. 2015, 5, 383–392. [Google Scholar] [CrossRef]
- Yang, F.S.; He, J.; Wang, J.; Wang, M.H. Auxiliary-function-based double integral inequality approach to stability analysis of load frequency control systems with interval time-varying delay. IET Control Theory Appl. 2018, 12, 601–612. [Google Scholar] [CrossRef]
- Yang, F.S.; He, J.; Pan, Q. Further improvement on delay-dependent load frequency control of power systems via truncated B-L inequality. IEEE Trans. Power Syst. 2018, 33, 5062–5071. [Google Scholar] [CrossRef]
- Yang, F.S.; He, J.; Wang, D.H. New stability criteria of delayed load frequency control systems via infinite-series-based inequality. IEEE Trans. Ind. Inform. 2018, 14, 231–240. [Google Scholar] [CrossRef]
- Gheisarnejad, M.; Khooban, M.H. Design an optimal fuzzy fractional proportional integral derivative controller with derivative filter for load frequency control in power systems. Trans. Inst. Meas. Contorl 2019, 41, 2563–2581. [Google Scholar] [CrossRef]
- Shiroei, M.; Ranjbar, A.M. Supervisory predictive control of power system load frequency control. Int. J. Electr. Power Energy Syst. 2014, 61, 70–80. [Google Scholar] [CrossRef]
- Zhang, C.K.; He, Y.; Jiang, L.; Wu, M.; Zeng, H.B. Stability analysis of systems with time-varying delay via relaxed integral inequalities. Syst. Control Lett. 2016, 92, 52–61. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.O.; Tanaka, K.; Griffin, M.F. An approach to fuzzy control of nonlinear systems: Stability and design issues. IEEE Trans. Fuzzy Syst. 1996, 2, 14–23. [Google Scholar] [CrossRef]
- Balas, G.; Chiang, R.; Packard, A.; Safonov, M. Robust Control Toolbox User’s Guide; MathWorks: Natick, MA, USA, 2010. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | R | D | M | |||
|---|---|---|---|---|---|---|
| Area 1 | 0.3 | 0.1 | 0.05 | 1.0 | 21 | 10 |
| Area 2 | 0.4 | 0.17 | 0.05 | 1.5 | 21.5 | 12 |
| Theorem 1 | [23] | [14] | [20] | Theorem 1 | [23] | [14] | [20] | ||
|---|---|---|---|---|---|---|---|---|---|
| 0 | 0.05 | 30.91 | 30.91 | 27.92 | 27.92 | 27.50 | 27.26 | 20.45 | 26.37 |
| 0 | 0.1 | 15.20 | 15.20 | 13.77 | 13.77 | 13.73 | 13.39 | 9.93 | 12.96 |
| 0 | 0.2 | 7.34 | 7.33 | 6.69 | 6.69 | 6.61 | 6.43 | 4.59 | 6.25 |
| 0 | 0.4 | 3.39 | 3.38 | 3.12 | 3.12 | 3.02 | 2.91 | 1.81 | 2.85 |
| 0 | 0.6 | 2.05 | 2.04 | 1.91 | 1.91 | 1.80 | 1.71 | 1.01 | 1.68 |
| 0 | 1.0 | 0.93 | 0.92 | 0.88 | 0.88 | 0.78 | 0.75 | 0.48 | 0.74 |
| 0.1 | 0.05 | 32.75 | 31.61 | 27.03 | 27.03 | 29.51 | 22.00 | 17.39 | 20.25 |
| 0.1 | 0.1 | 16.12 | 16.02 | 13.68 | 13.69 | 14.52 | 12.32 | 9.16 | 11.07 |
| 0.1 | 0.2 | 7.80 | 7.79 | 6.94 | 6.94 | 7.02 | 6.59 | 4.67 | 5.93 |
| 0.1 | 0.4 | 3.62 | 3.61 | 3.29 | 3.29 | 3.23 | 3.11 | 1.85 | 2.87 |
| 0.1 | 0.6 | 2.20 | 2.19 | 2.02 | 2.02 | 1.94 | 1.84 | 1.05 | 1.75 |
| 0.1 | 1.0 | 1.02 | 1.01 | 0.96 | 0.96 | 0.86 | 0.75 | 0.48 | 0.74 |
| h | |||||||
|---|---|---|---|---|---|---|---|
| 0.05 | 0.1 | 0.15 | 0.2 | 0.4 | 0.6 | 1.0 | |
| 0 | 30.91 | 15.20 | 9.96 | 7.34 | 3.39 | 2.05 | 0.93 |
| 0.05 | 31.88 | 15.68 | 10.27 | 7.58 | 3.51 | 2.13 | 0.98 |
| 0.1 | 32.75 | 16.12 | 10.57 | 7.80 | 3.62 | 2.20 | 1.02 |
| 0.2 | 34.23 | 16.83 | 11.04 | 8.17 | 3.80 | 2.32 | 1.08 |
| 0.4 | 35.41 | 17.61 | 11.59 | 8.56 | 3.99 | 2.43 | 1.12 |
| 0.6 | 32.28 | 16.45 | 11.26 | 8.31 | 3.79 | 2.29 | 0.95 |
| 1.0 | 0.60 | 0.59 | 0.58 | 0.57 | 0.52 | 0.47 | 0.37 |
| Theorem 1 | [23] | [14] | [20] | Theorem 1 | [23] | [14] | [20] | ||
|---|---|---|---|---|---|---|---|---|---|
| 0 | 0.2 | 7.23 | 7.23 | 6.60 | 6.60 | 6.66 | 6.41 | 5.55 | 6.14 |
| 0 | 0.4 | 3.24 | 3.24 | 3.00 | 3.00 | 2.95 | 2.81 | 2.36 | 2.68 |
| 0 | 0.6 | 1.86 | 1.86 | 1.74 | 1.74 | 1.65 | 1.54 | 1.18 | 1.40 |
| 0 | 1.0 | 0.59 | 0.58 | 0.57 | 0.57 | 0.45 | 0.41 | 0.22 | 0.35 |
| 0.1 | 0.1 | 16.01 | 15.97 | 13.65 | 13.65 | 13.97 | 13.73 | 11.63 | 12.58 |
| 0.1 | 0.2 | 7.68 | 7.67 | 6.88 | 6.88 | 7.10 | 6.75 | 5.35 | 6.34 |
| 0.1 | 0.4 | 3.47 | 3.47 | 3.17 | 3.17 | 3.16 | 2.84 | 2.55 | 2.83 |
| 0.1 | 0.6 | 2.03 | 2.03 | 1.86 | 1.86 | 1.78 | 1.53 | 1.30 | 1.51 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, B.-Y.; Shangguan, X.-C.; Jin, L.; Li, D.-Y. An Improved Stability Criterion for Load Frequency Control of Power Systems with Time-Varying Delays. Energies 2020, 13, 2101. https://doi.org/10.3390/en13082101
Chen B-Y, Shangguan X-C, Jin L, Li D-Y. An Improved Stability Criterion for Load Frequency Control of Power Systems with Time-Varying Delays. Energies. 2020; 13(8):2101. https://doi.org/10.3390/en13082101
Chicago/Turabian StyleChen, Bi-Ying, Xing-Chen Shangguan, Li Jin, and Dan-Yun Li. 2020. "An Improved Stability Criterion for Load Frequency Control of Power Systems with Time-Varying Delays" Energies 13, no. 8: 2101. https://doi.org/10.3390/en13082101
APA StyleChen, B. -Y., Shangguan, X. -C., Jin, L., & Li, D. -Y. (2020). An Improved Stability Criterion for Load Frequency Control of Power Systems with Time-Varying Delays. Energies, 13(8), 2101. https://doi.org/10.3390/en13082101