
Virtual Inertia Coordinated Allocation Method Considering Inertia Demand and Wind Turbine Inertia Response Capability

Abstract
:1. Introduction
2. Analysis of Inertia Response Capability of Wind Turbines
2.1. Virtual Inertia Control of Wind Turbines
2.2. Virtual Inertia Time Constant of Wind Turbines
3. Evaluation of the Inertia Response Capability of Wind Turbines
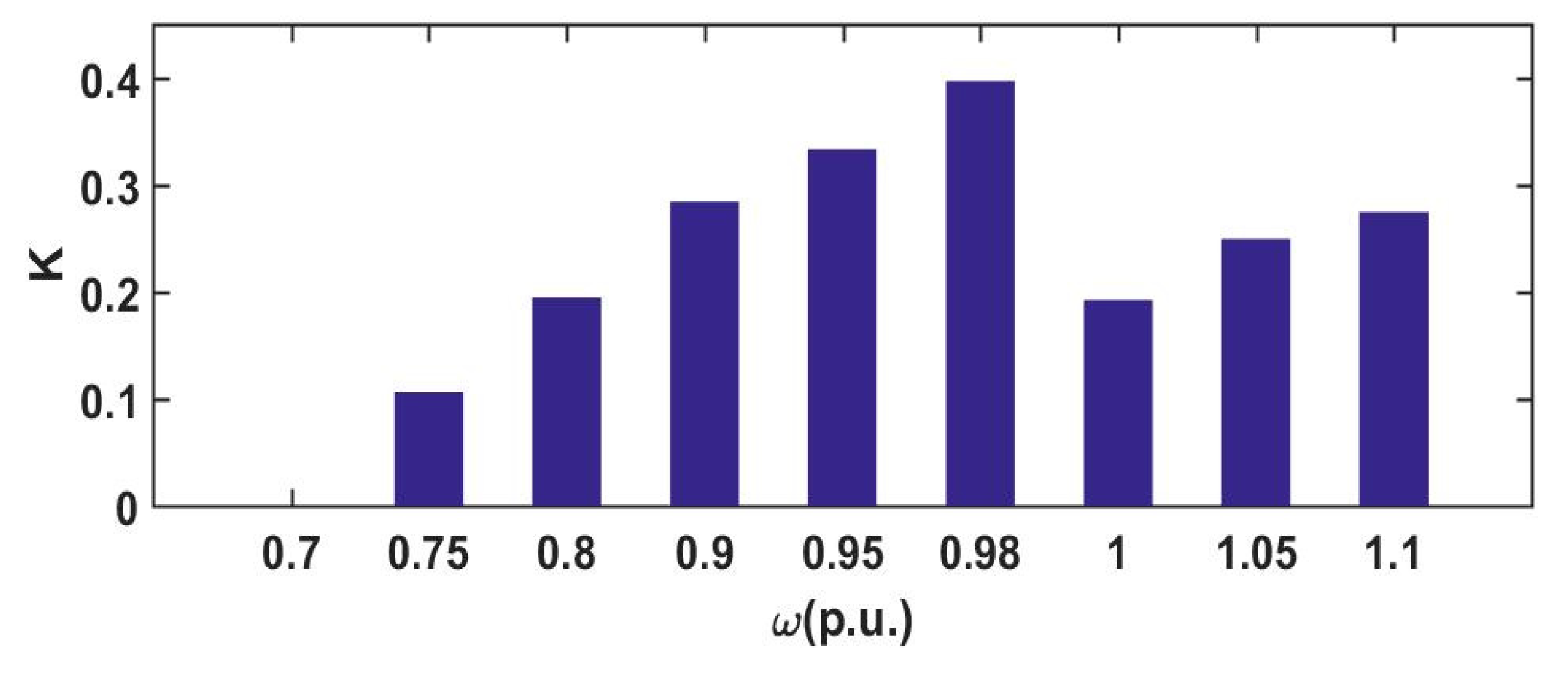
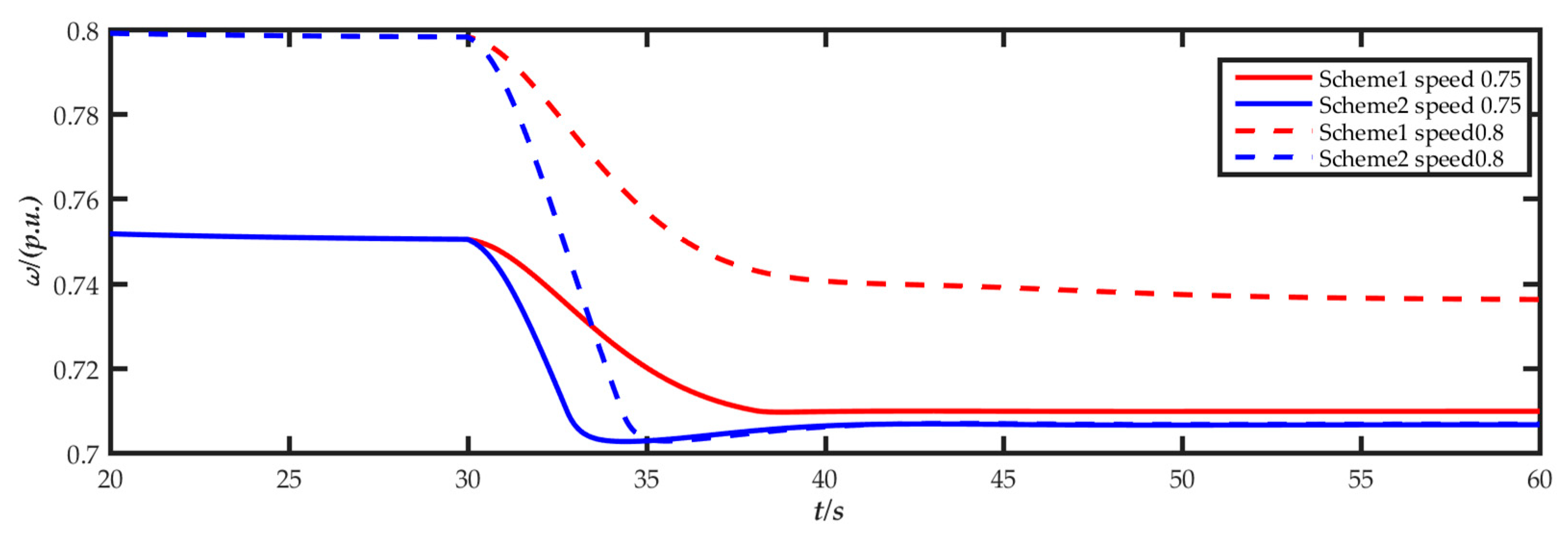
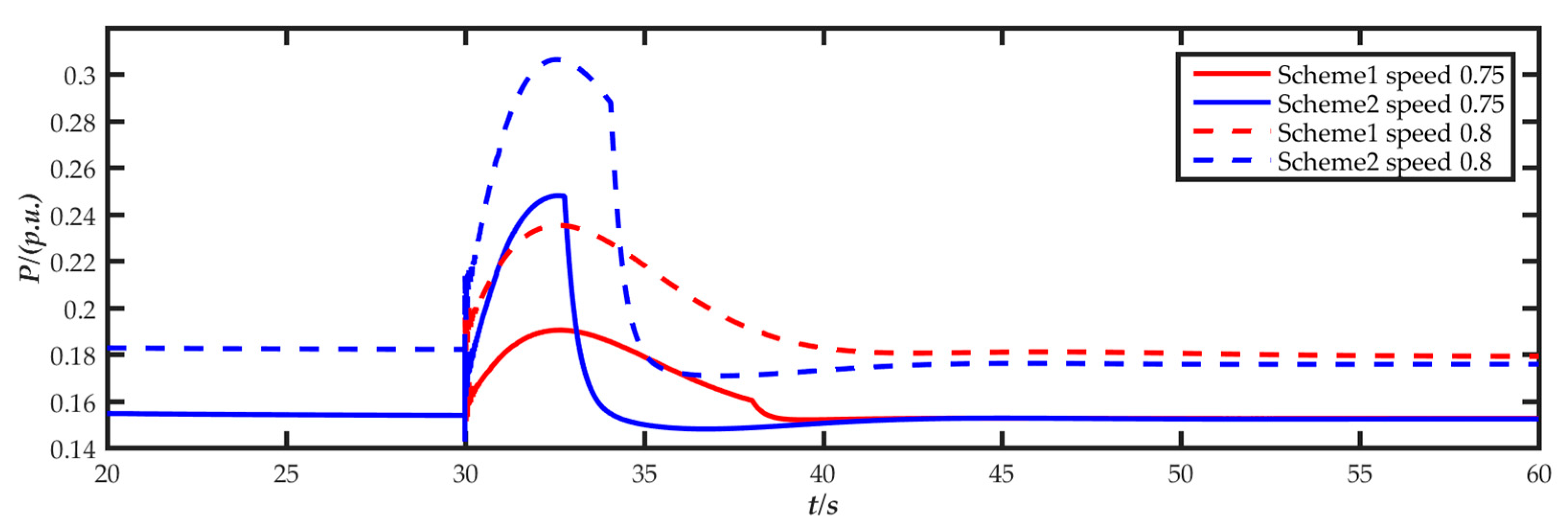
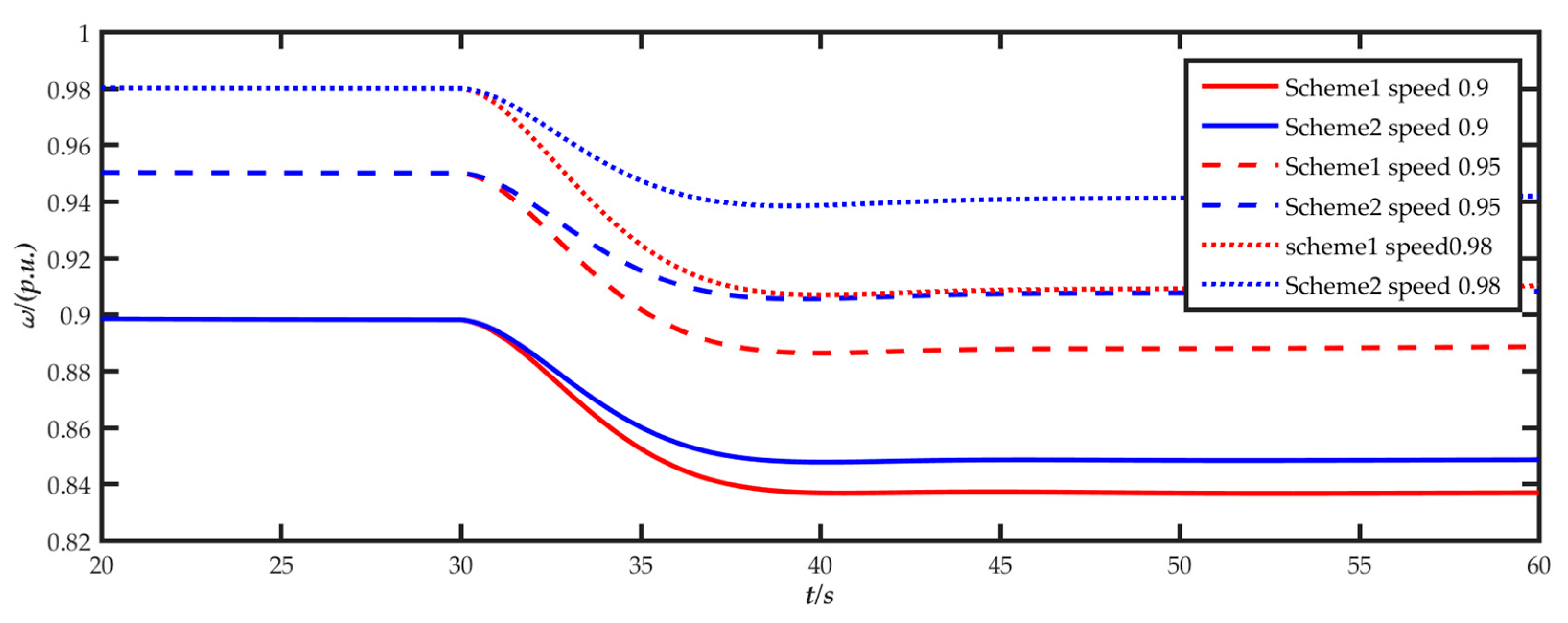
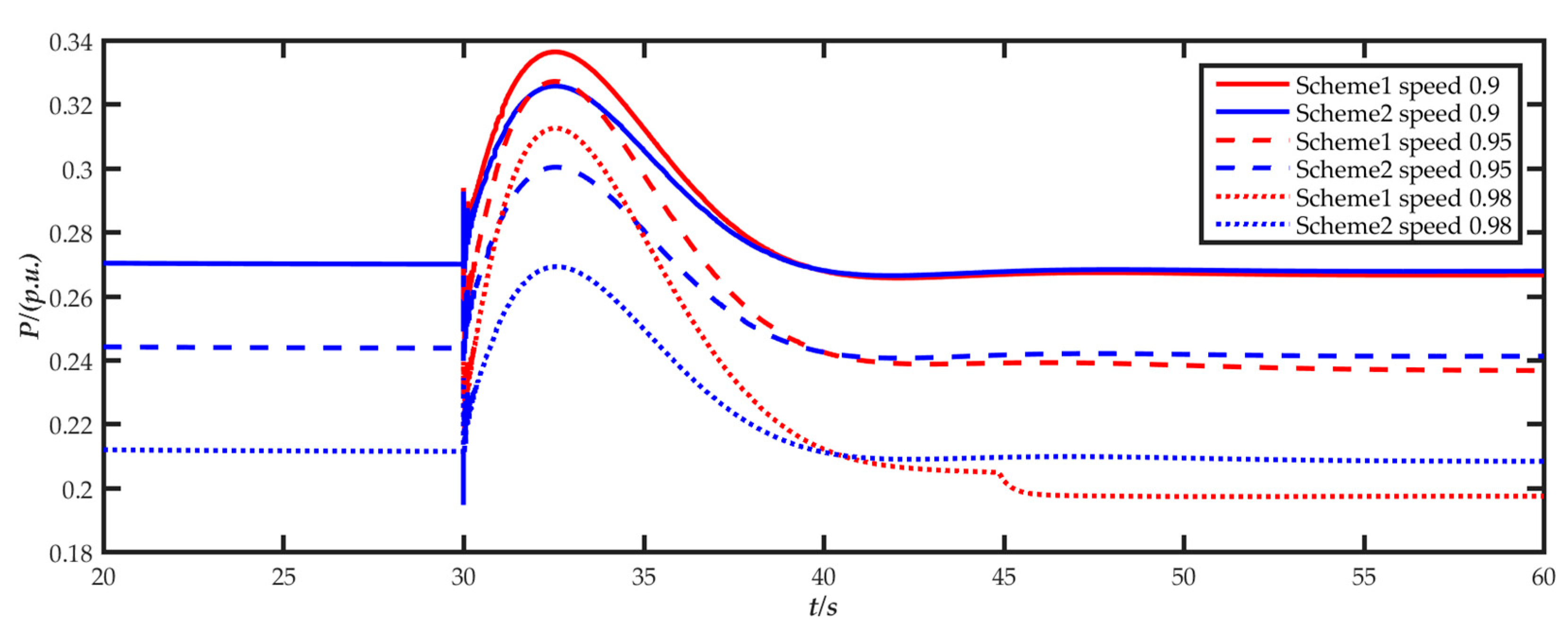
3.1. Comparison of Inertia Response Capability of Wind Turbines under Different Working Conditions
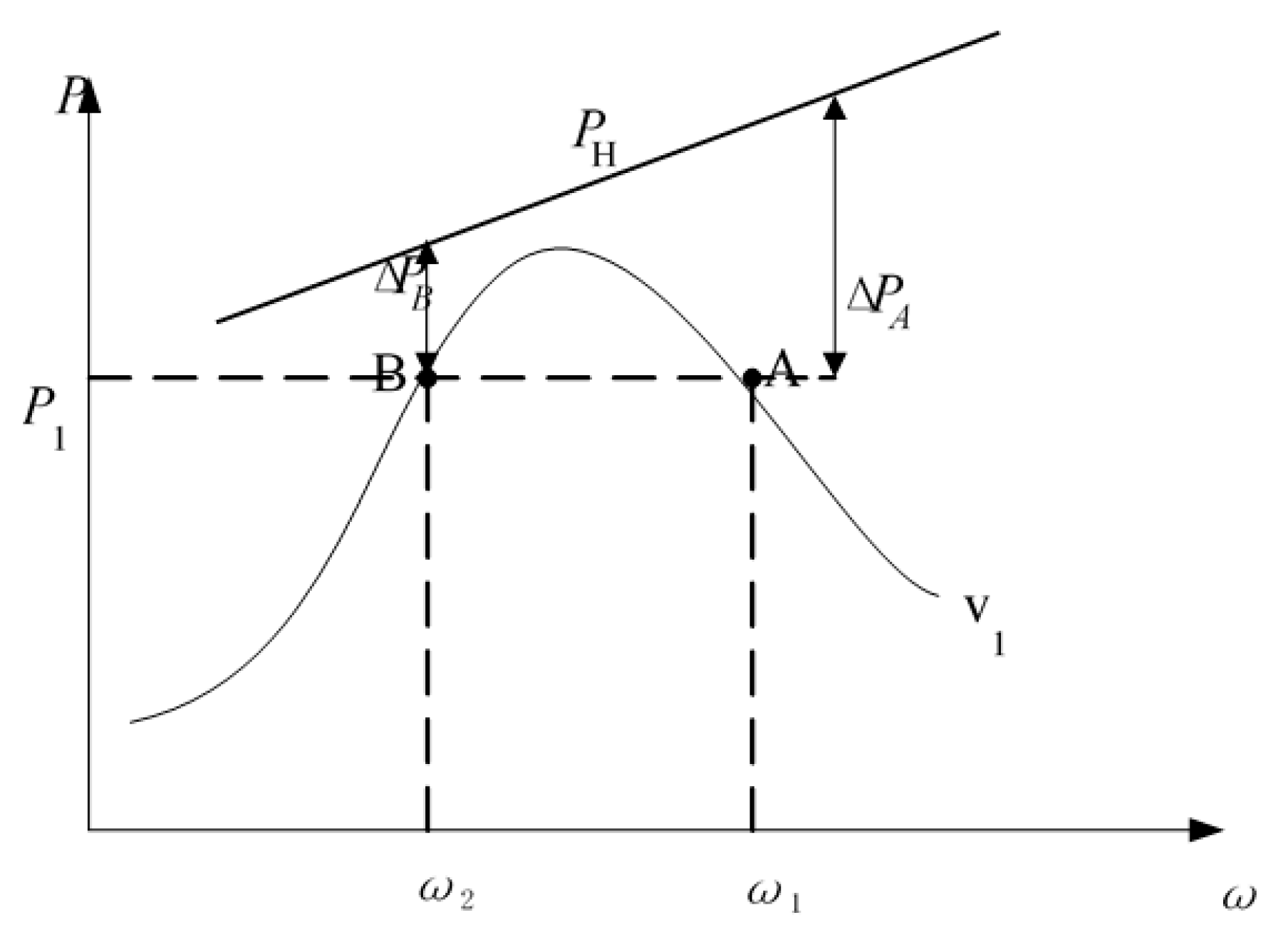
3.2. Evaluation Index of Wind Turbine Inertia Response Capability
4. Wind Turbine Virtual Inertia Allocation
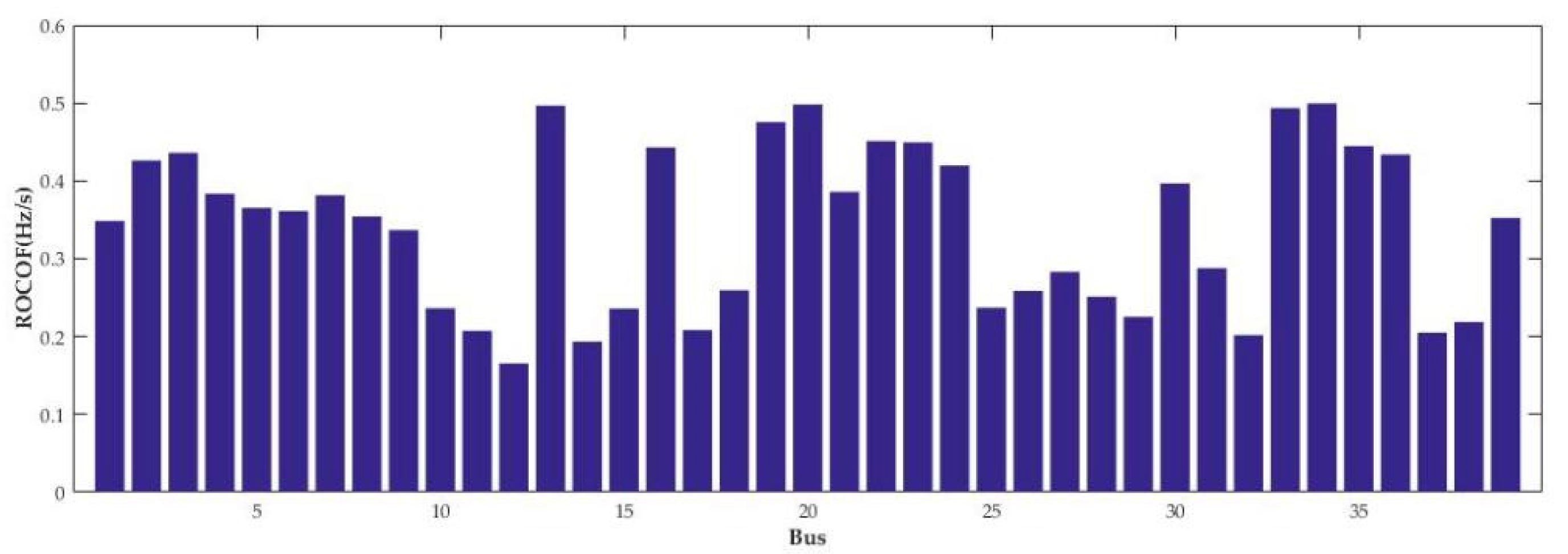
4.1. System Minimum Inertia Requirement
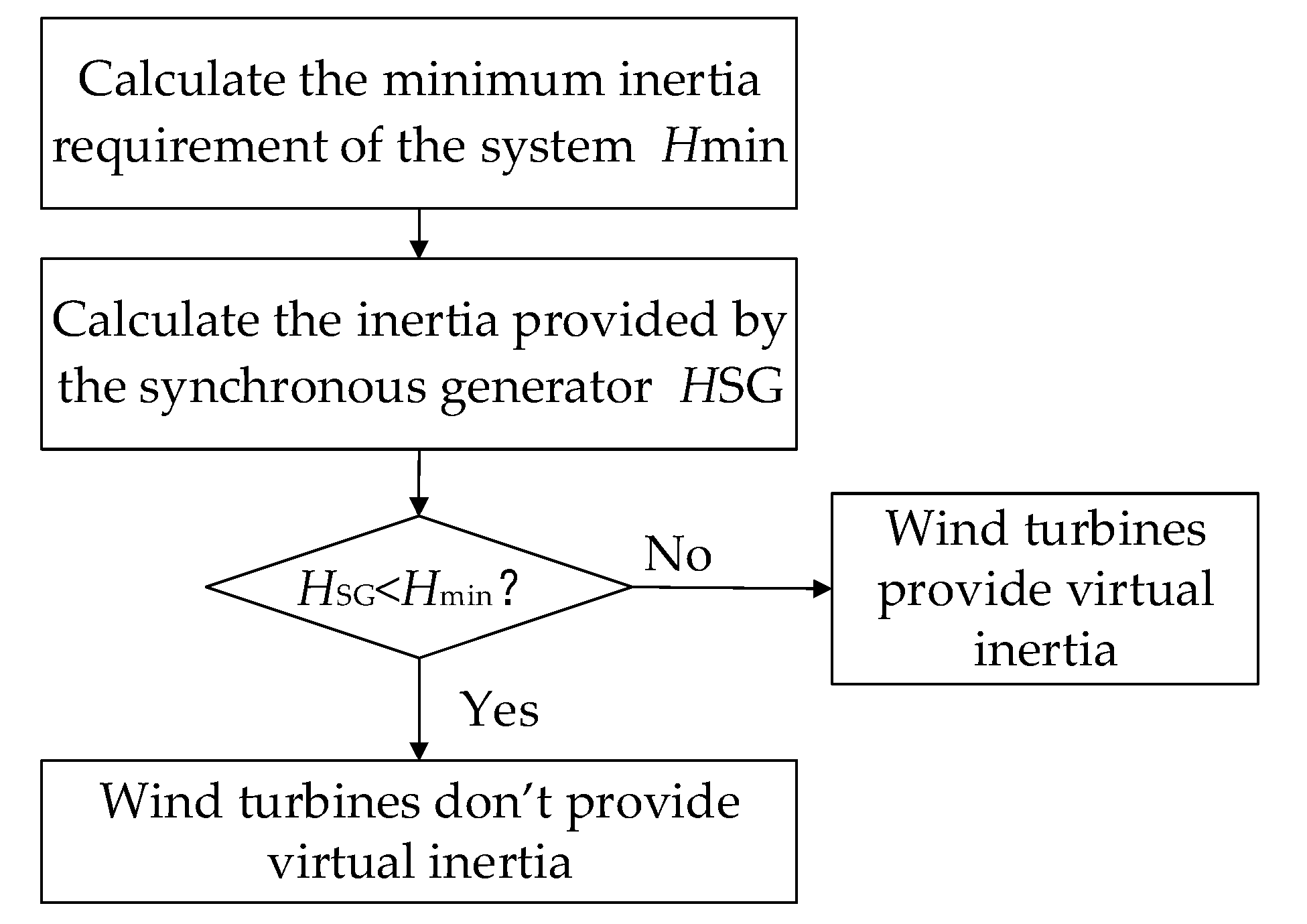
4.2. Decisions of Wind Turbine Participation in Inertia Response
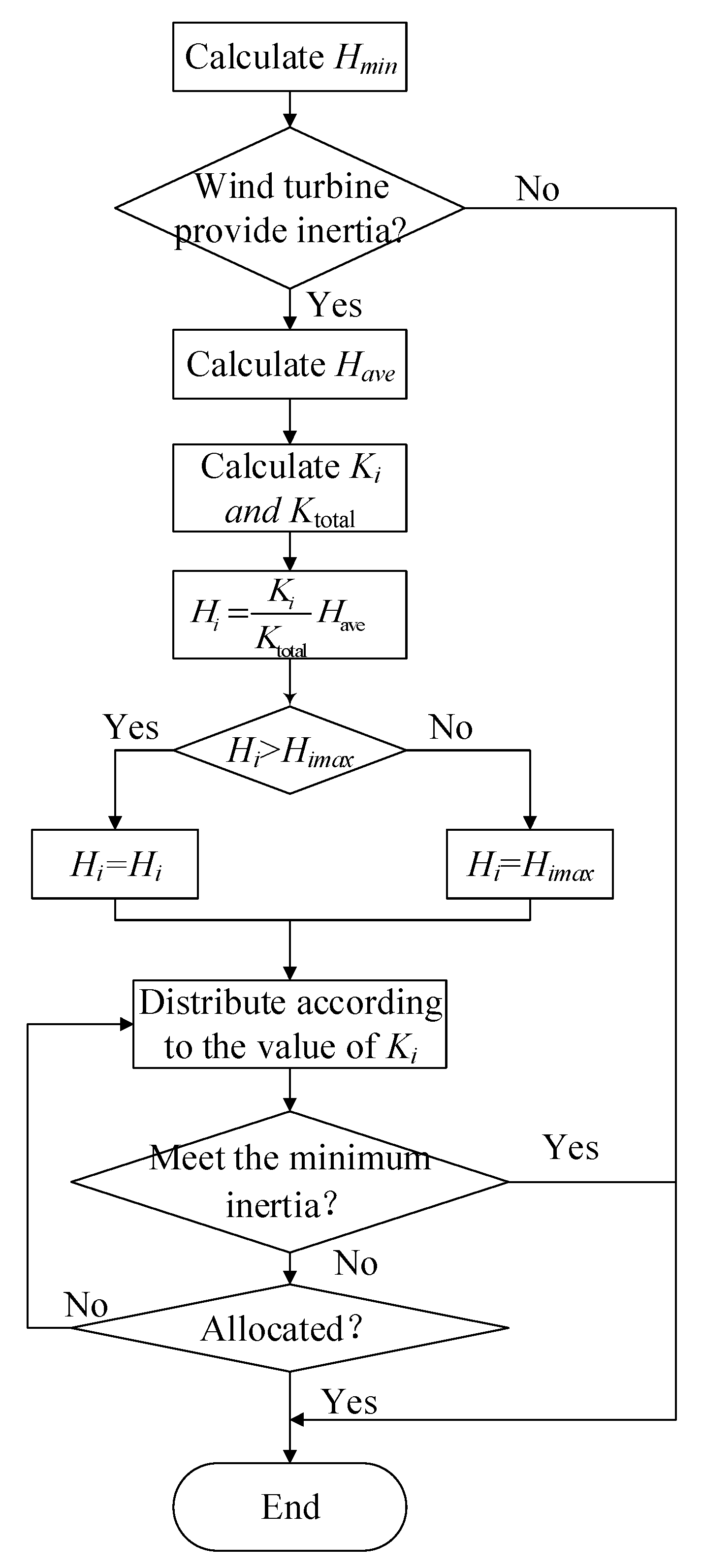
4.3. Preliminary Allocation of Virtual Inertia of Wind Turbines
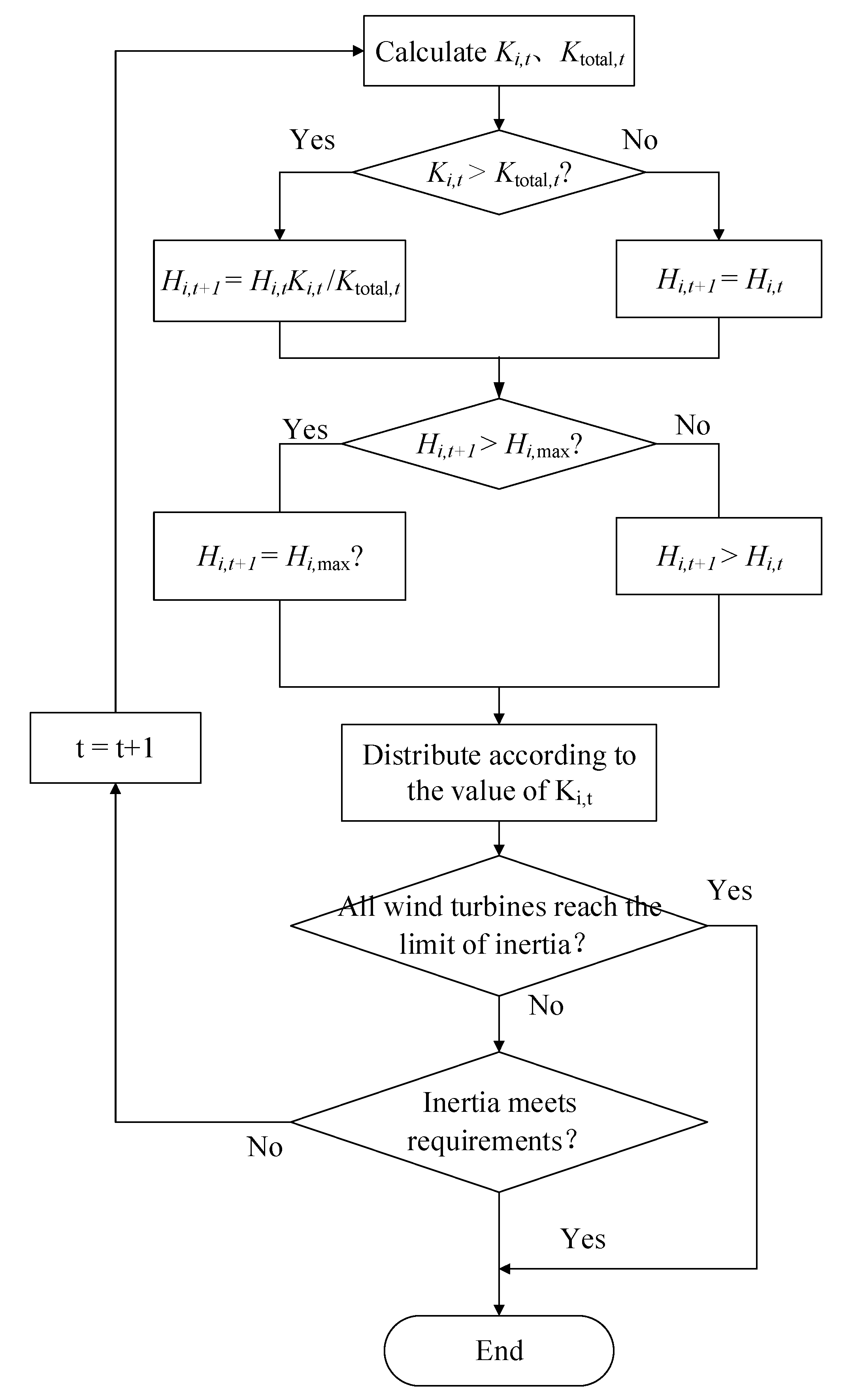
4.4. Wind Turbine Virtual Inertia Adjustment
5. Simulation Analysis
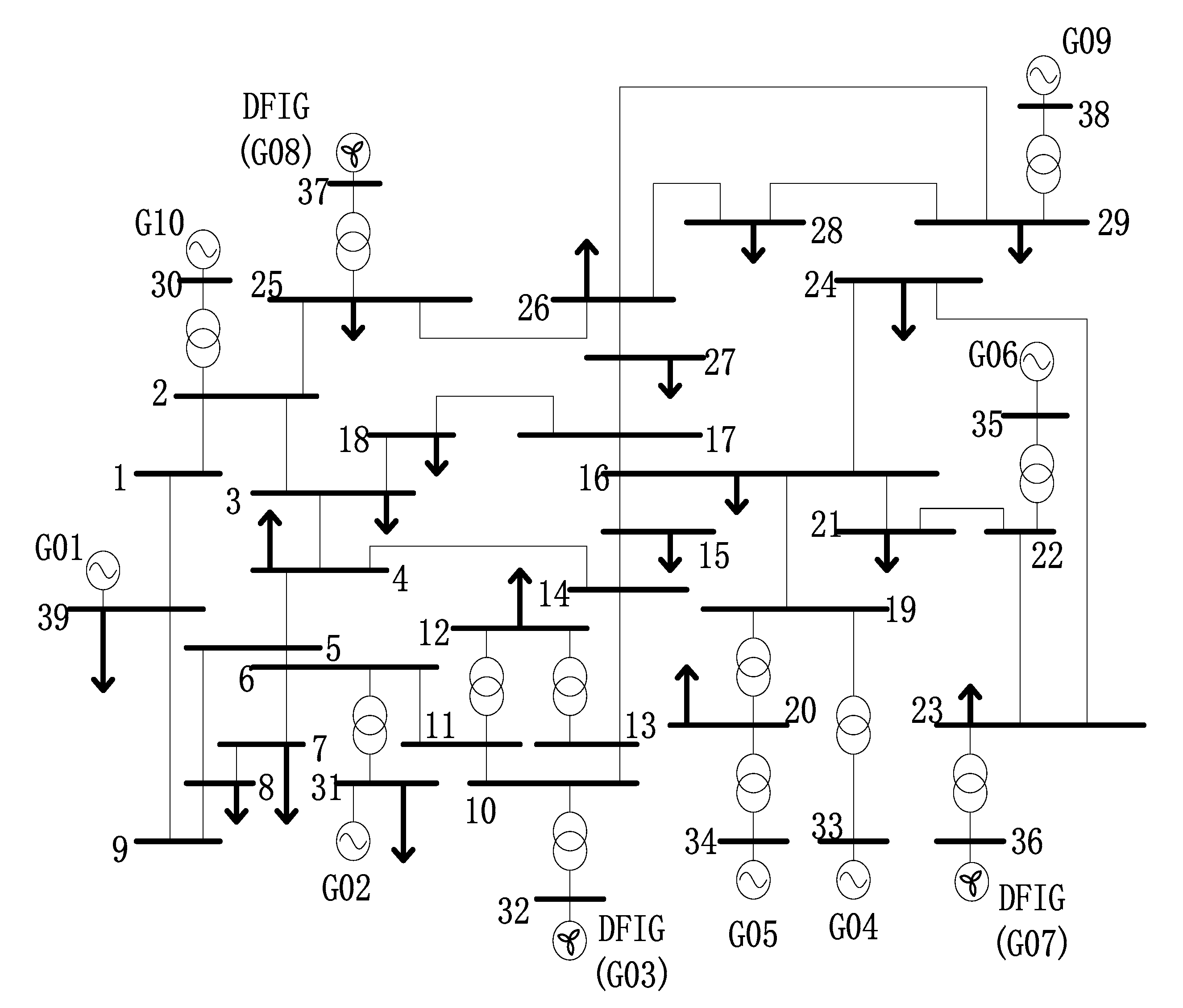
5.1. Simulation System
5.2. Inertia Allocation
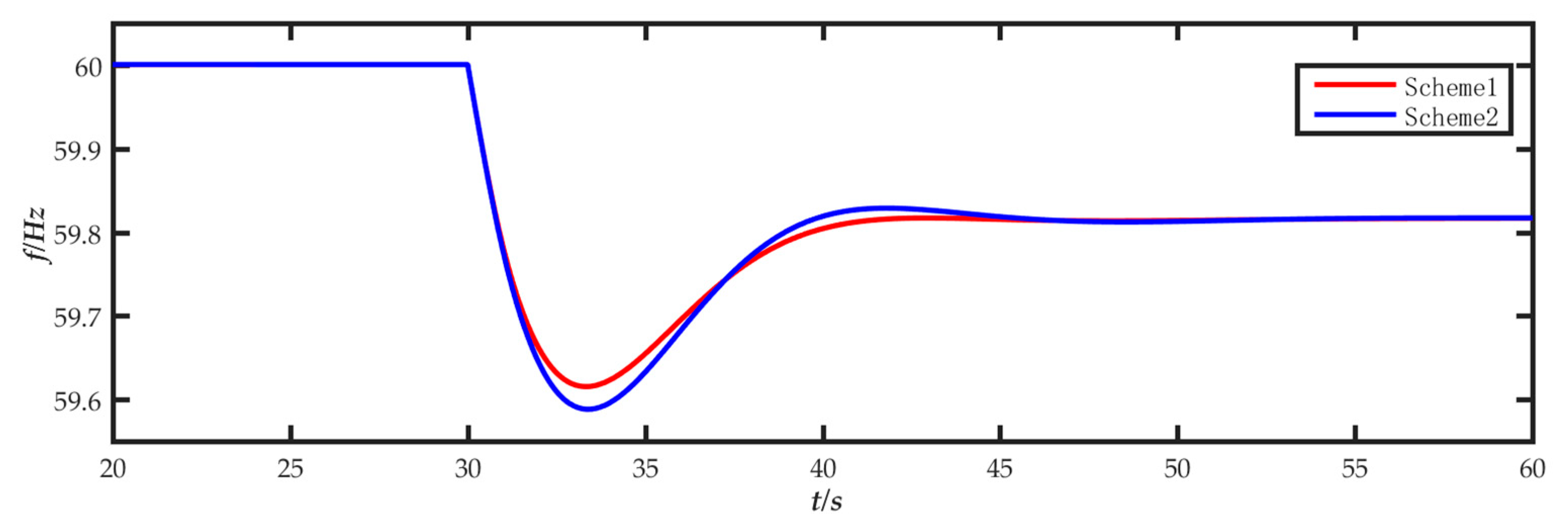
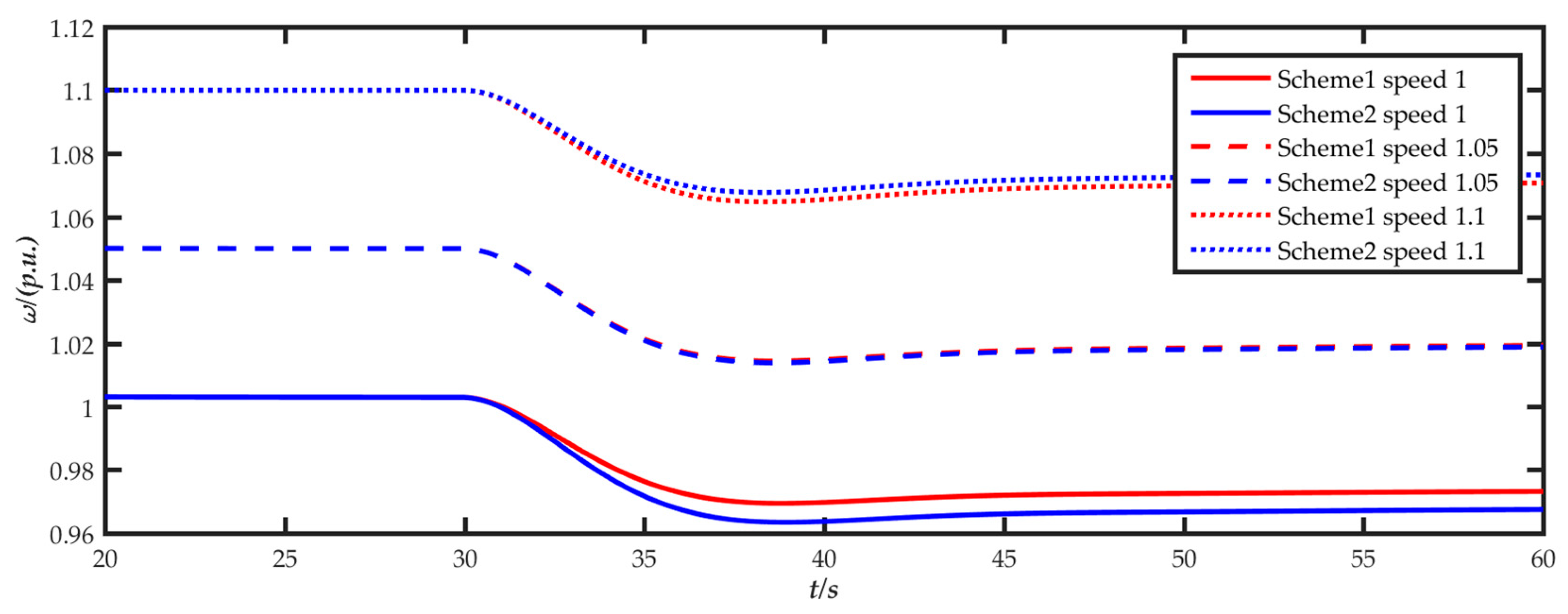
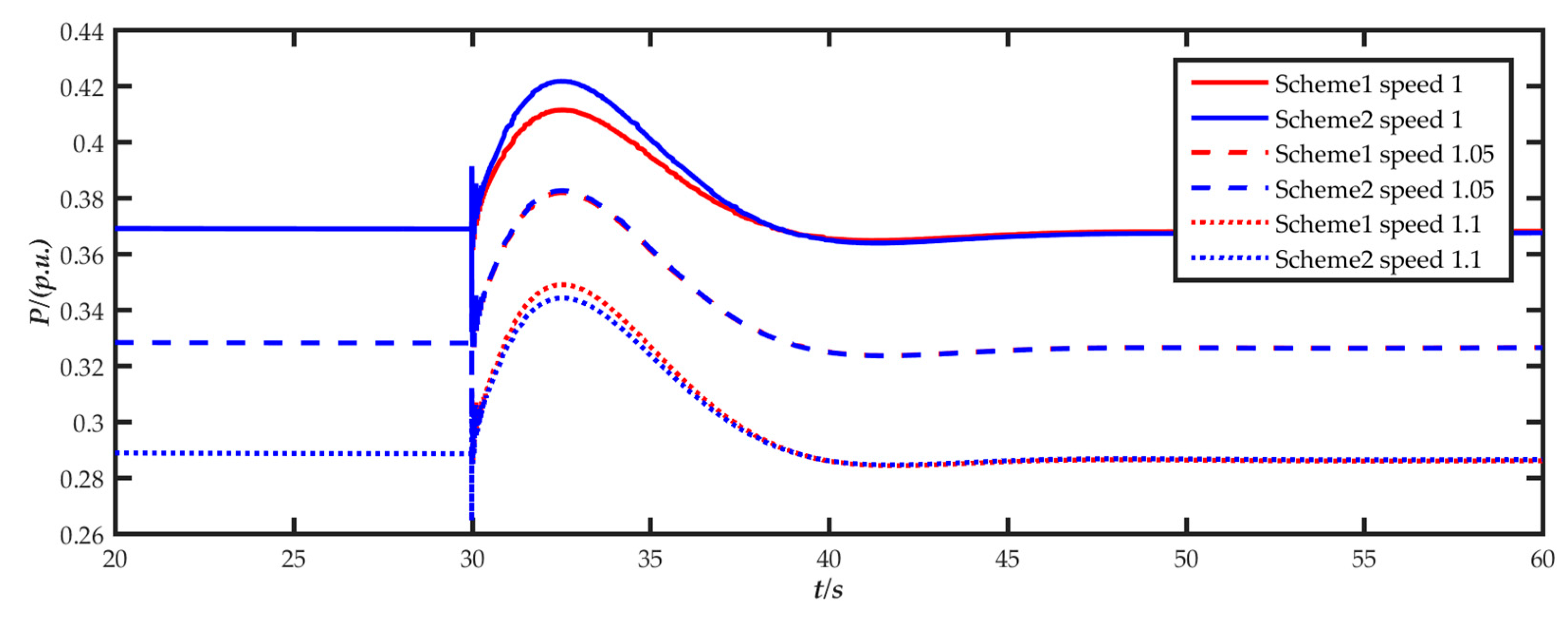
5.3. Comparative Analysis of Inertia Allocation
- (1)
- Scheme 1: The virtual inertia coordinated allocation scheme proposed in this paper;
- (2)
- Scheme 2: Even allocation. Regardless of their own inertia response capability, the virtual inertia time constant of each wind turbines is set to 10.1 s.
6. Conclusions
- (1)
- In order to express the inertia response capability of wind turbines in different operating states, this paper proposed the inertia response capability evaluation index K, which comprehensively considered the rotor kinetic energy storage and the wind turbines output power limitation.
- (2)
- Through the inertia response capability evaluation index K, the inertia response capability of wind turbines in the medium-wind speed zone was the strongest, followed by the high-wind speed zone, and the low-wind speed zone was the weakest. In addition, the inertia response improvement in wind turbines in the medium-wind speed zone by over-speed load shedding was higher than that of wind turbines in the high-wind speed zone.
- (3)
- Based on the inertia response capability evaluation index K, considering the system requirements and the wind turbines’ own inertia response capability, this paper proposed the virtual inertia coordinated allocation method, and the simulation verified the effectiveness of the method.
Author Contributions
Funding
Conflicts of Interest
References
- Sun, H.D.; Wang, B.C.; Li, W.F.; Yang, C.; Wei, W. Research on inertia system of frequency response for power system with high penetration electronics. Proc. CSEE 2020, 40, 5179–5192. [Google Scholar]
- Wang, B.; Yang, D.Y.; Cai, G.W. Review of research on power system inertia related issues in the context of high penetration of renewable power generation. Power Syst. Technol. 2020, 44, 2998–3007. [Google Scholar]
- Zhang, X.; Chen, Y.L.; Yue, S.; Zha, X.B.; Zhang, D.Y.; Xue, L. Retrospect and Prospect of Research on Frequency Regulation Technology of Power System by Wind Power. Power Syst. Technol. 2018, 42, 1793–1803. [Google Scholar]
- Lan, F.; Pan, Y.F.; Shi, M.; Li, J.H. Optimal Variable-coefficient Virtual Inertia Control for DFIG-based Wind Turbines. Autom. Electr. Power Syst. 2019, 43, 51–61. [Google Scholar]
- Ke, X.B.; Zhang, W.C.; Li, P.W.; Niu, S.B.; Sheng, S.Q.; Yang, J.W. Fuzzy Adaptive Virtual Inertia Control for High Wind Power Penetration System. Power Syst. Technol. 2020, 44, 2127–2136. [Google Scholar]
- Altin, M.; Hansen, A.D.; Barlas, T.K.; Das, K.; Sakamurl, J.N. Optimization of Short-term Overproduction Response of Variable Speed Wind Turbines. IEEE Trans. Sustain. Energy 2018, 9, 1732–1739. [Google Scholar] [CrossRef]
- Attya, A.B.; Dominguez-Garcia, J.L.; Anaya-Lara, O. A review on frequency support provision by wind power plants: Current and future challenges. Renew. Sustain. Energy Rev. 2018, 81, 2071–2087. [Google Scholar] [CrossRef] [Green Version]
- Yang, D.J.; Kim, J.; Kang, Y.C.; Muljadl, E.; Zhang, N.; Hong, J.; Song, S.H.; Zheng, T.Y. Temporary Frequency Support of a DFIG for High Wind Power Penetration. IEEE Trans. Power Syst. 2018, 33, 3428–3437. [Google Scholar] [CrossRef]
- Keung, P.K.; Li, P.; Bannakar, H.; Ooi, B.T. Kinetic energy of wind-turbine generators for system frequency support. IEEE Trans. Power Syst. 2009, 24, 279–287. [Google Scholar] [CrossRef]
- Li, S.L.; Wang, W.S.; Zhang, X.; Qin, S.Y.; Xie, Z.; Wang, R.M. Impact of wind power on power system frequency and combined virtual inertia control. Autom. Electr. Power Syst. 2019, 43, 64–73. [Google Scholar]
- Li, S.C.; Huang, Y.H.; Wang, L.Y.; Lei, X.L.; Tang, H.Y.; Deng, C.H. Modeling Primary Frequency Regulation Auxiliary Control System of Doubly Fed Induction Generator Based on Rotor Speed Control. Proc. CSEE 2017, 37, 7077–7089. [Google Scholar]
- Wang, X.D.; Li, K.K.; Lu, S.X.; Liu, Y.M. Virtual Synchronous Generrator Based Virtual Inertial Control Strategy of Wind Turbine. Acta Energ. Sol. Sin. 2018, 39, 1418–1425. [Google Scholar]
- Ding, L.; Yin, S.Y.; Wang, T.X.; Jiang, J.P.; Cheng, F.M.; Si, J.C. Integrated Frequency Control Strategy of DFIGs Based on Virtual Inertia and Over-Speed Control. Power Syst. Technol. 2015, 39, 2385–2391. [Google Scholar]
- Chen, Y.H.; Wang, G.; Shi, Q.M.; Fu, L.J.; Jiang, W.T.; Huang, H. A New Coordinated Virtual Inertia Control Strategy for Wind Farms. Autom. Electr. Power Syst. 2015, 39, 27–33. [Google Scholar]
- Deng, H.M.; Tang, L.L.; Wu, X.G.; Qiao, Y.; Liu, F. Active power control strategy of wind farms based on wind turbine regulation ability ranking. Power Syst. Technol. 2018, 42, 2577–2584. [Google Scholar]
- Shi, Q.; Wang, G.; Ma, W.; Fu, L.; Wu, L.; Xing, P. Coordinated virtual inertia control strategy for D-PMSG considering frequency regulation ability. J. Electr. Eng. Technol. 2016, 11, 1921–1935. [Google Scholar] [CrossRef] [Green Version]
- Li, S.L.; Qin, S.Y.; Wang, R.M.; Zhang, L.; Bi, R. A collaborative control of primary frequency regulation for DFIG-WT. Acta Energ. Sol. Sin. 2020, 41, 101–109. [Google Scholar]
- Kundur, P. Power System Stability and Control; McGraw-Hill Professional: New York, NY, USA, 1994; pp. 128–136. [Google Scholar]
- Liu, B.B.; Yang, J.W.; Liao, K.; He, Z.Y. Improved Frequency control strategy for DFIG-based wind turbines based on rotor kinetic energy control. Autom. Electr. Power Syst. 2016, 40, 17–22. [Google Scholar]
- Ghosh, S.; Kamalasadan, S.; Senroy, N.; Enslin, J. Doubly fed induction generator(DFIG)-based wind farm control framework for primary frequency and inertial response application. IEEE Trans. Power Syst. 2016, 31, 1861–1871. [Google Scholar] [CrossRef]
- Tang, X.S.; Miao, F.F.; Qi, Z.P.; He, H.M.; Wu, T.; Li, S.Y. Survey on frequency control of wind power. Proc. CSEE 2014, 34, 4304–4314. [Google Scholar]
- Fu, Y.S.; Sang, D.; Cao, W.; Zhang, Z.; Zhang, J. REserviceS project of EU and it’s enlightenment to China’s wind power and PV participation in grid frequency regulation. Power Syst. Technol. 2019, 43, 613–621. [Google Scholar]
- Liu, Y.; Shao, G.H.; Zhang, H.P.; Wang, C.Y. Analysis of renewable energy participation in primary frequency regulation and parameter setting scheme of power grid. Power Syst. Technol. 2020, 44, 683–689. [Google Scholar]
- Li, D.D.; Zhang, J.L.; Xu, B.; Zhao, Y.; Yang, F. Equivalent Inertia Assessment in Renewable Power System Considering Properties of Distributed Frequency. Power Syst. Technol. 2020, 44, 2913–2921. [Google Scholar]
- Gu, H.J.; Yan, R.F.; Saha, T.K. Minimum Synchronous Inertia Requirement of Renewable Power Systems. IEEE Trans. Power Syst. 2018, 33, 1533–1543. [Google Scholar] [CrossRef] [Green Version]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Generator | SN/MVA | H/s | Inertia/GW·s |
|---|---|---|---|
| G01 | 1000 | 5 | 5 |
| G02 | 1000 | 3.03 | 3.03 |
| G04 | 1000 | 2.86 | 2.86 |
| G05 | 1000 | 2.60 | 2.60 |
| G06 | 1000 | 3.48 | 3.48 |
| G09 | 1000 | 3.45 | 3.45 |
| G10 | 1000 | 4.20 | 4.20 |
| Wind Speed | Wind Farm | ω/p.u. | Load Shedding | Number |
|---|---|---|---|---|
| Low-wind speed zone | G07 | 0.7 | 0 | 30 |
| 0.75 | 0 | 42 | ||
| 0.8 | 0 | 40 | ||
| Medium-wind speed zone | G03 | 0.9 | 0 | 35 |
| 0.95 | 10% | 52 | ||
| 0.98 | 20% | 43 | ||
| High-wind speed zone | G08 | 1 | 0 | 60 |
| 1.05 | 10% | 15 | ||
| 1.1 | 22% | 33 |
| Wind Farm | ω/p.u. | Number | K | H/s | Inertia /GW·s |
|---|---|---|---|---|---|
| G07 | 0.7 | 30 | 0 | 0 | 0 |
| 0.75 | 42 | 0.1064 | 4.25 | 0.298 | |
| 0.8 | 40 | 0.1947 | 7.78 | 0.52 | |
| G03 | 0.9 | 35 | 0.2843 | 11.35 | 0.66 |
| 0.95 | 52 | 0.3333 | 13.31 | 1.16 | |
| 0.98 | 43 | 0.3967 | 15.85 | 1.14 | |
| G08 | 1 | 60 | 0.1924 | 7.68 | 0.77 |
| 1.05 | 15 | 0.2496 | 9.97 | 0.25 | |
| 1.1 | 33 | 0.2740 | 10.94 | 0.60 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, B.; Zhang, L.; Yao, Y.; Yu, X.; Yang, Y.; Li, D. Virtual Inertia Coordinated Allocation Method Considering Inertia Demand and Wind Turbine Inertia Response Capability. Energies 2021, 14, 5002. https://doi.org/10.3390/en14165002
Xu B, Zhang L, Yao Y, Yu X, Yang Y, Li D. Virtual Inertia Coordinated Allocation Method Considering Inertia Demand and Wind Turbine Inertia Response Capability. Energies. 2021; 14(16):5002. https://doi.org/10.3390/en14165002
Chicago/Turabian StyleXu, Bo, Linwei Zhang, Yin Yao, Xiangdong Yu, Yixin Yang, and Dongdong Li. 2021. "Virtual Inertia Coordinated Allocation Method Considering Inertia Demand and Wind Turbine Inertia Response Capability" Energies 14, no. 16: 5002. https://doi.org/10.3390/en14165002
APA StyleXu, B., Zhang, L., Yao, Y., Yu, X., Yang, Y., & Li, D. (2021). Virtual Inertia Coordinated Allocation Method Considering Inertia Demand and Wind Turbine Inertia Response Capability. Energies, 14(16), 5002. https://doi.org/10.3390/en14165002