
Noise Reduction Design with Trapezoidal Back-EMF and Asymmetric Air-Gap for Single-Phase BLDC Refrigerator Cooling Fan Motor


Abstract
:1. Introduction
2. Characteristics of a Single-Phase Motor
2.1. Governing Equations of a Single-Phase Motor
2.2. Actual Characteristics of a Single-Phase BLDC Motor
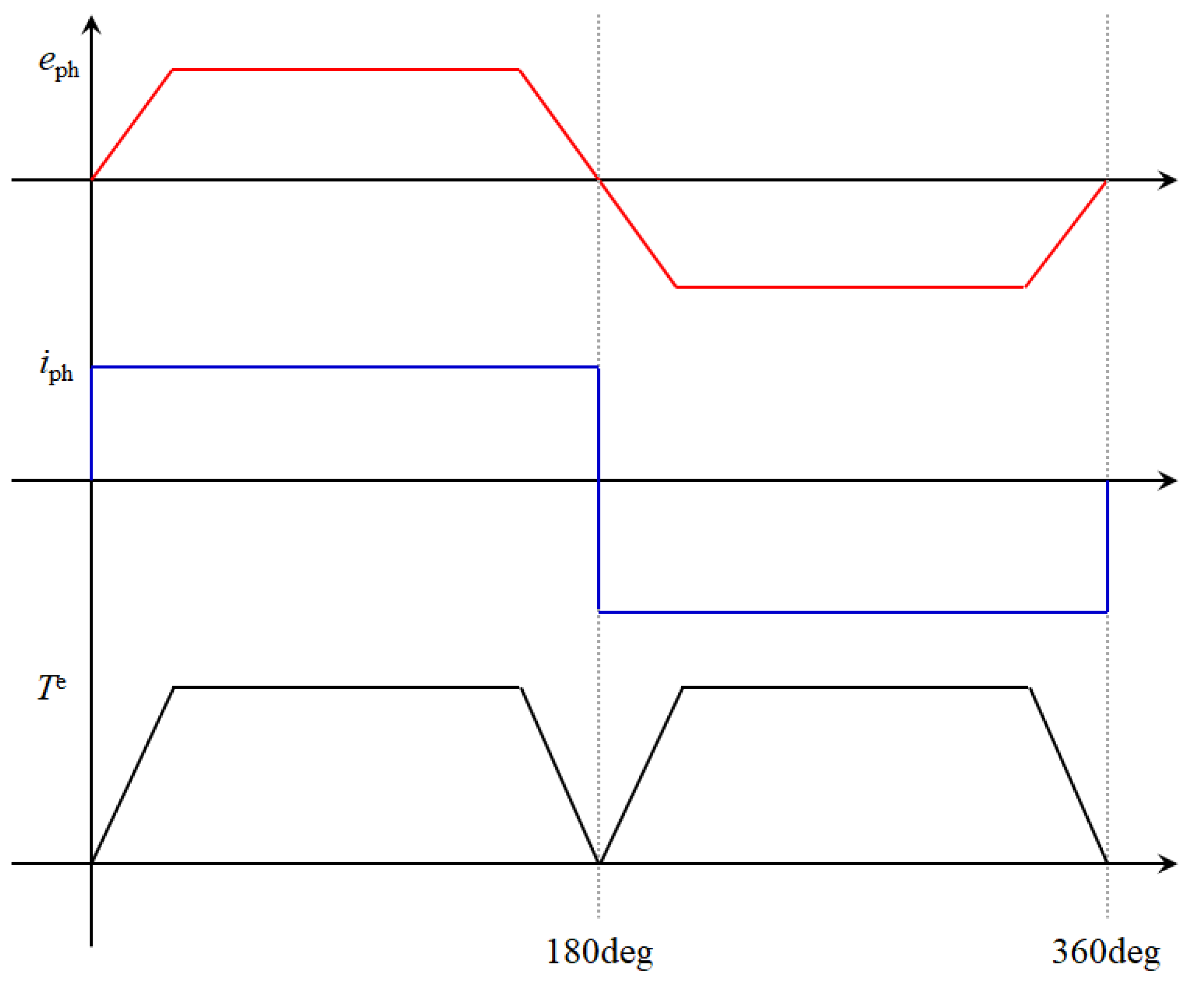
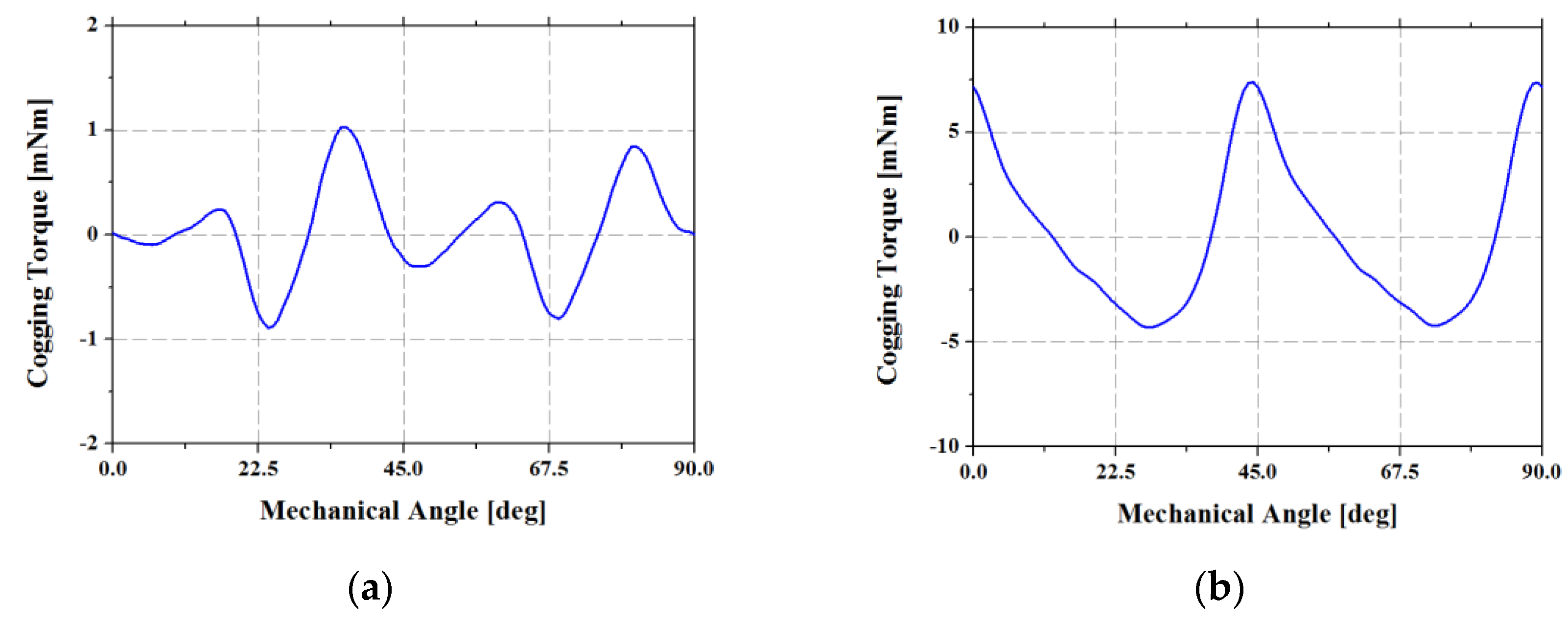
2.3. Decomposition of Torque in a Single-Phase BLDC Motor
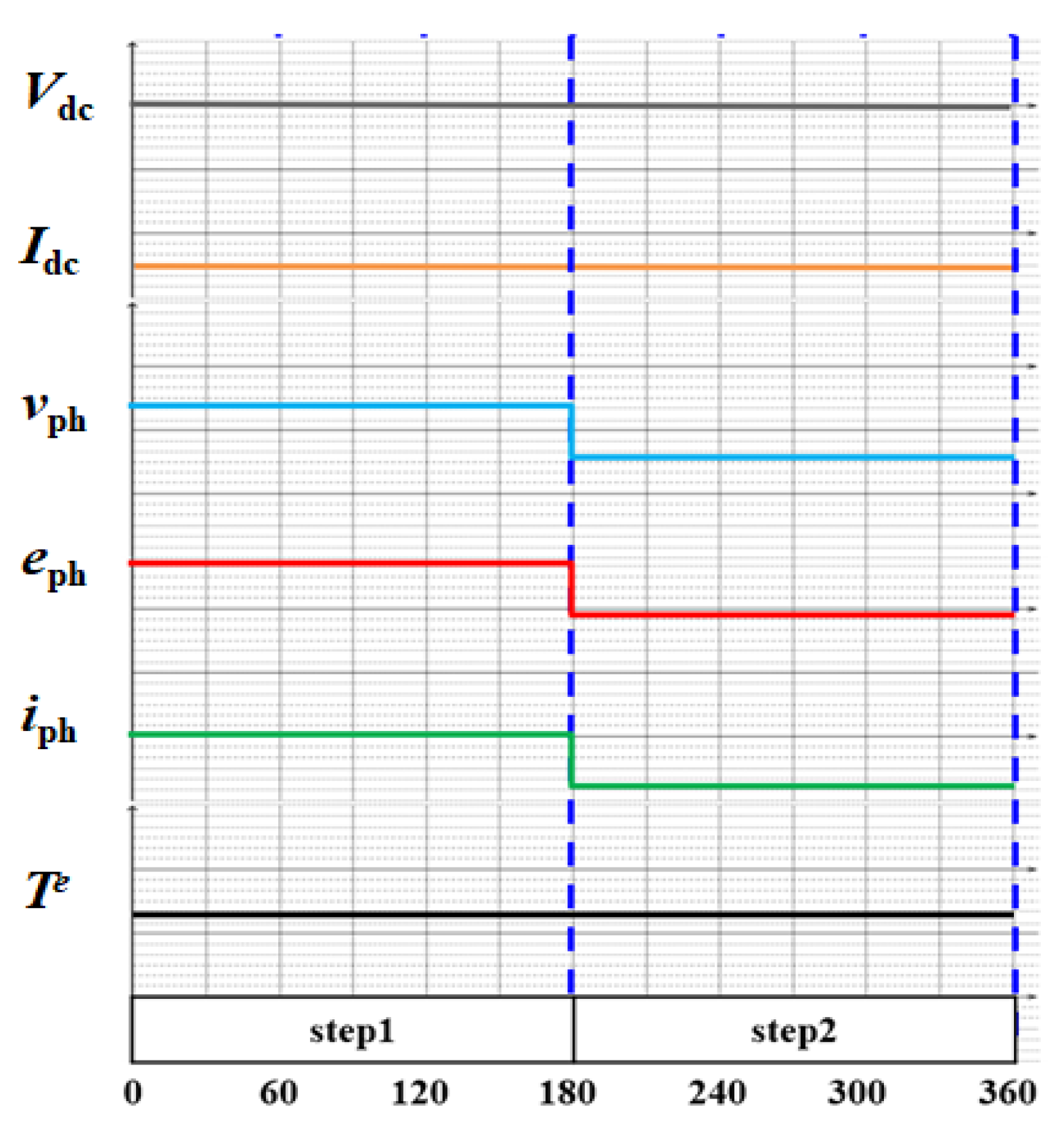
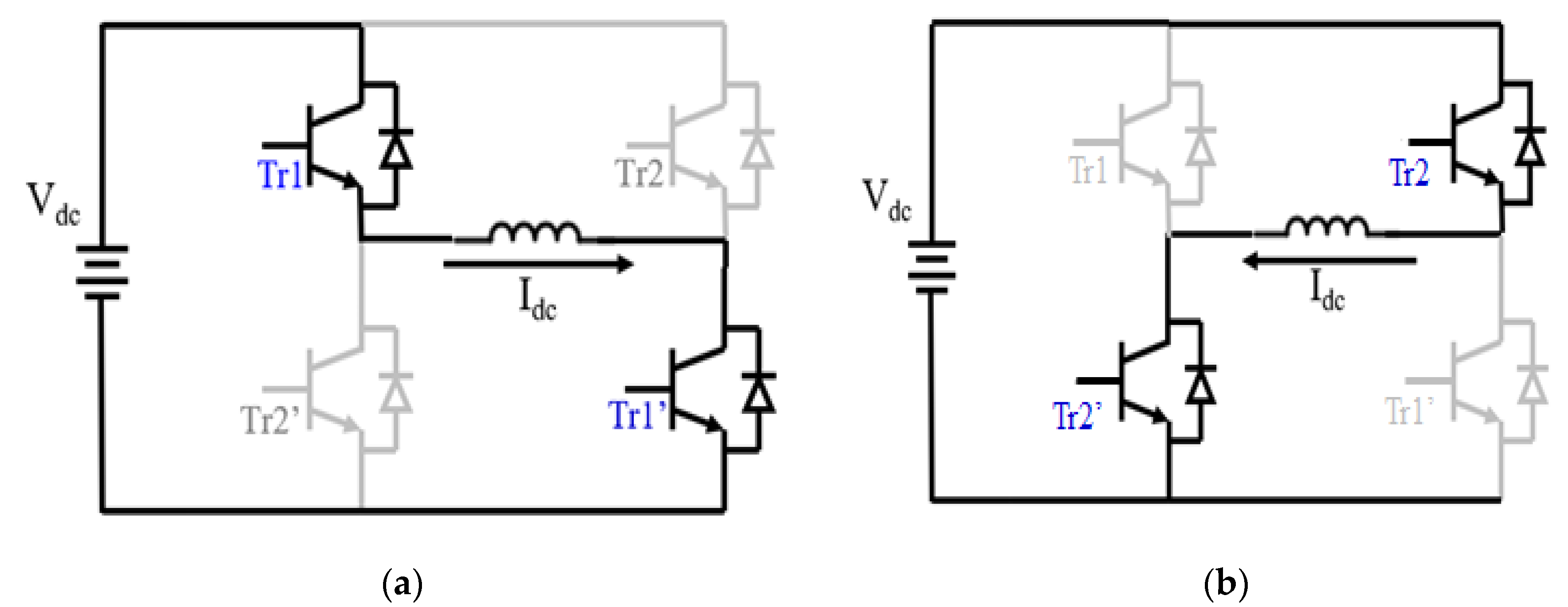
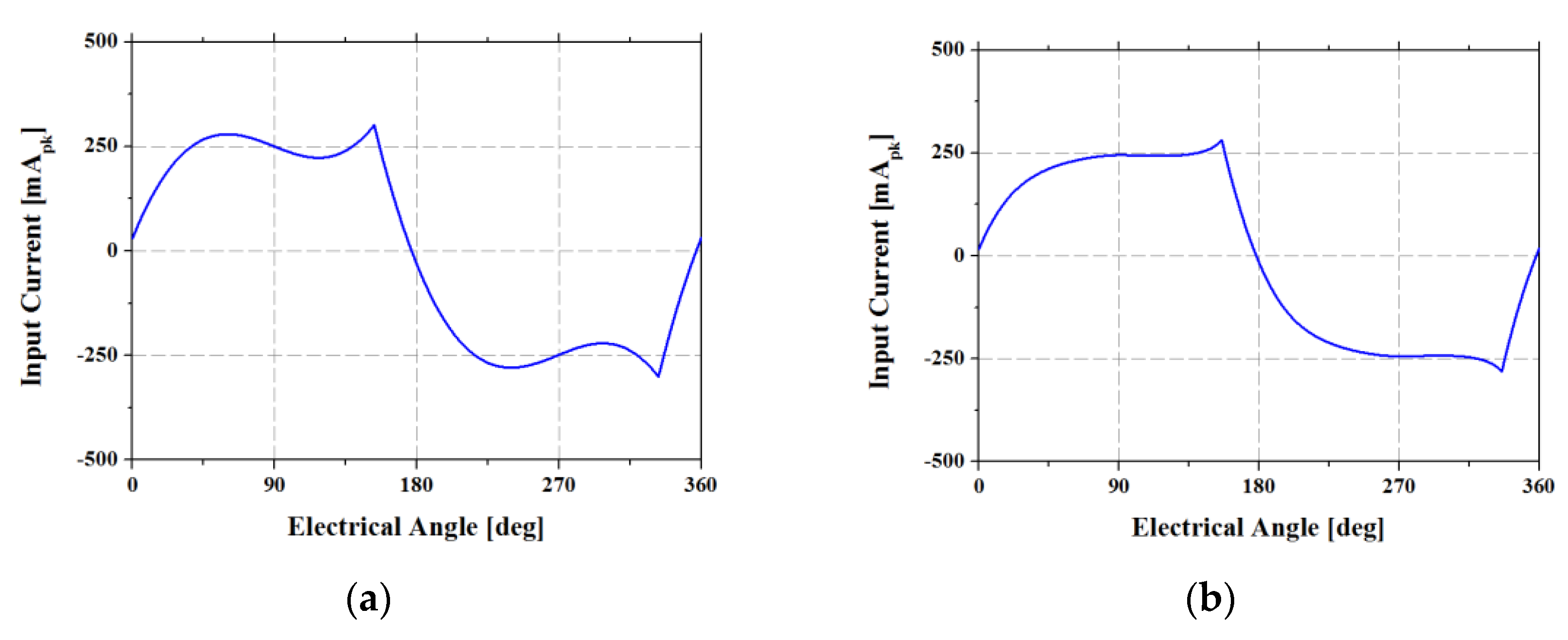
2.4. Current Source Analysis of a Single-Phase Claw-Pole Motor
2.5. Voltage Source Analysis of a Single-Phase Claw-Pole Motor
3. Novel Method of Reducing Torque Ripple for a Single-Phase Claw-Pole Motor
4. Modeling and Analysis of the Asymmetric Model
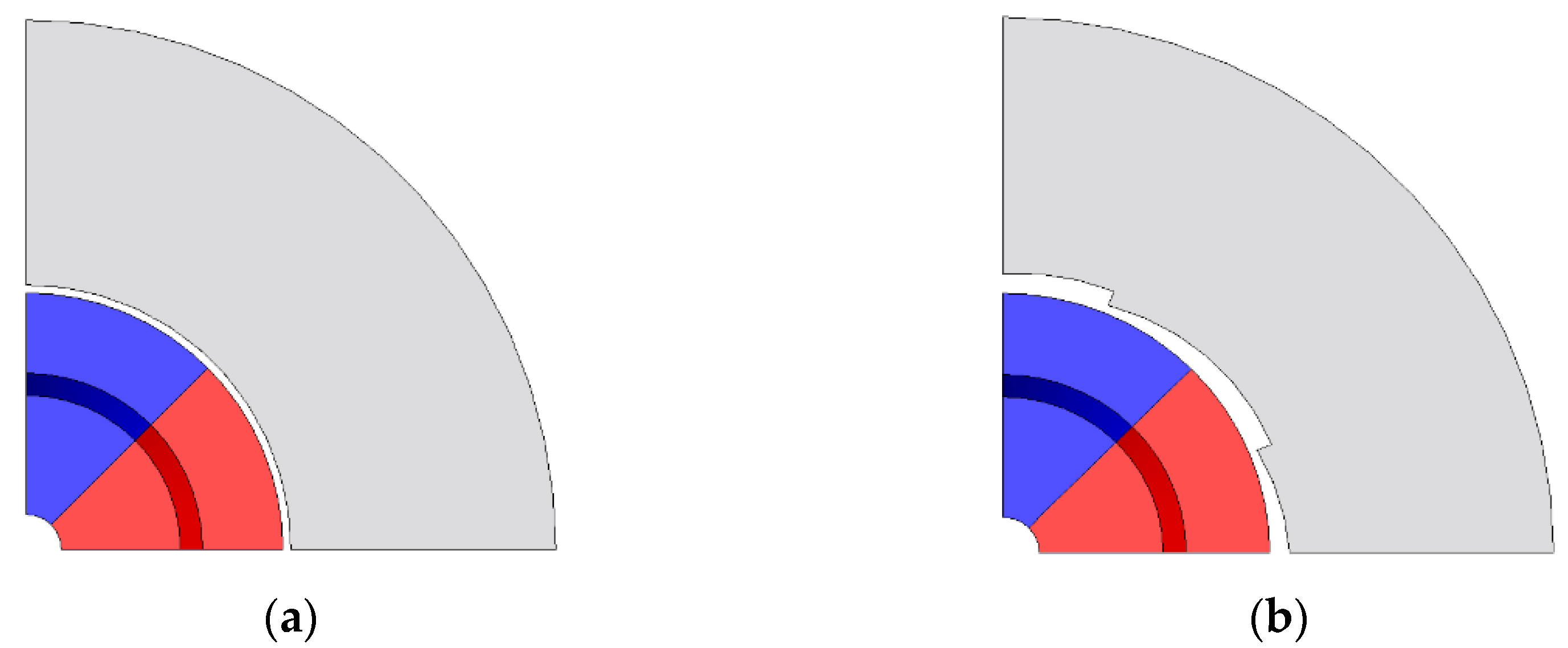
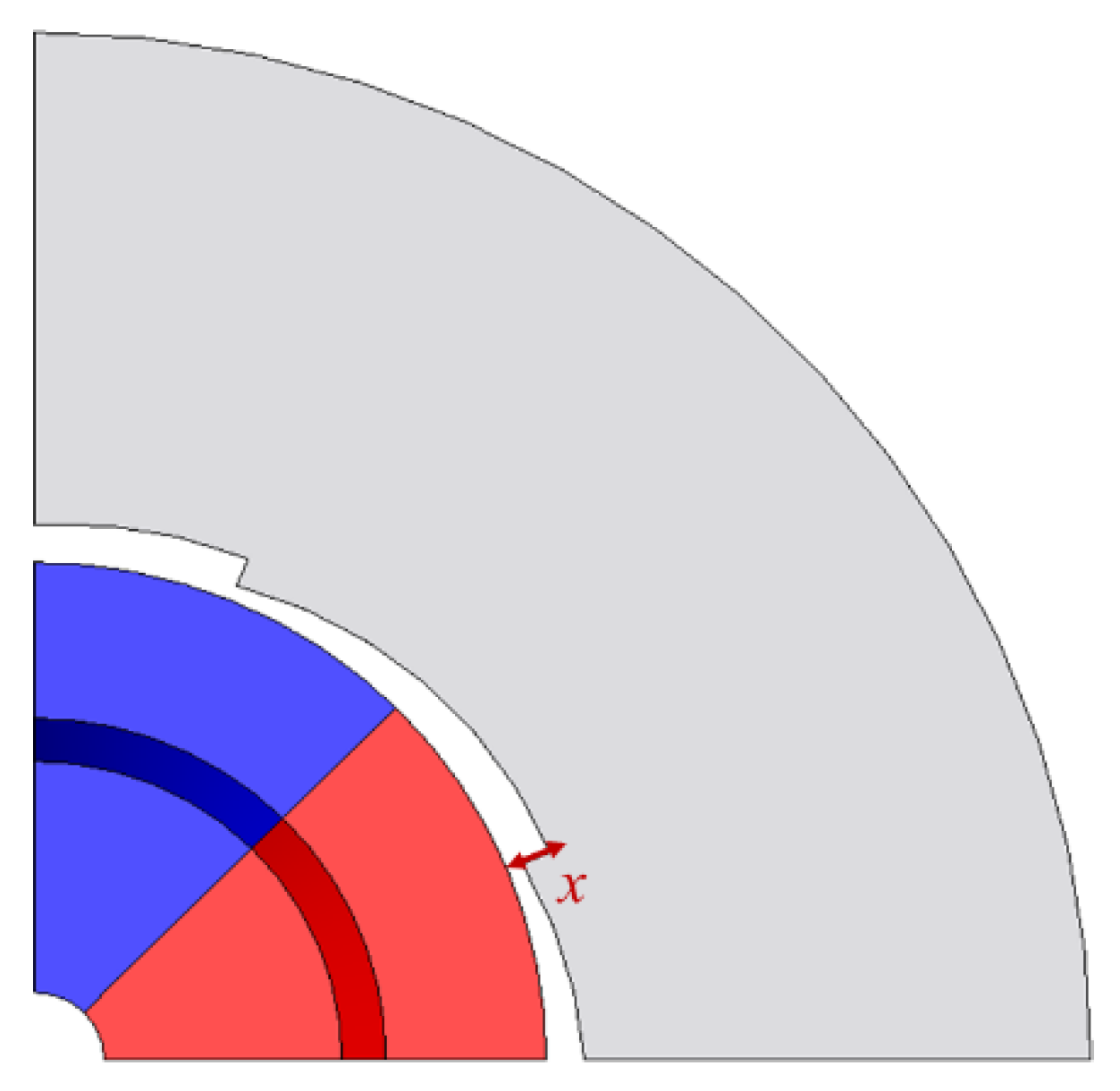
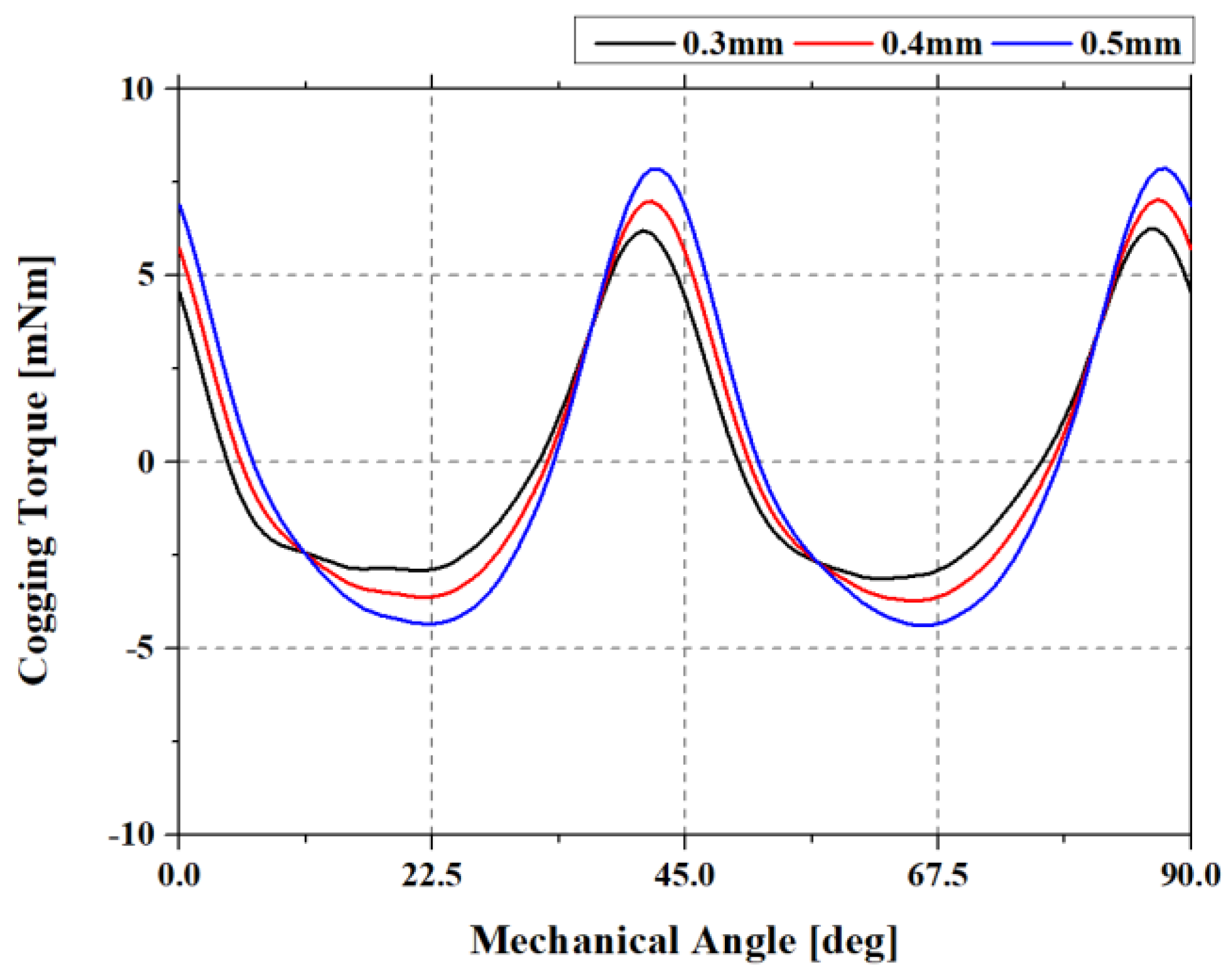
4.1. Optimal Size of the Asymmetric Air Gap
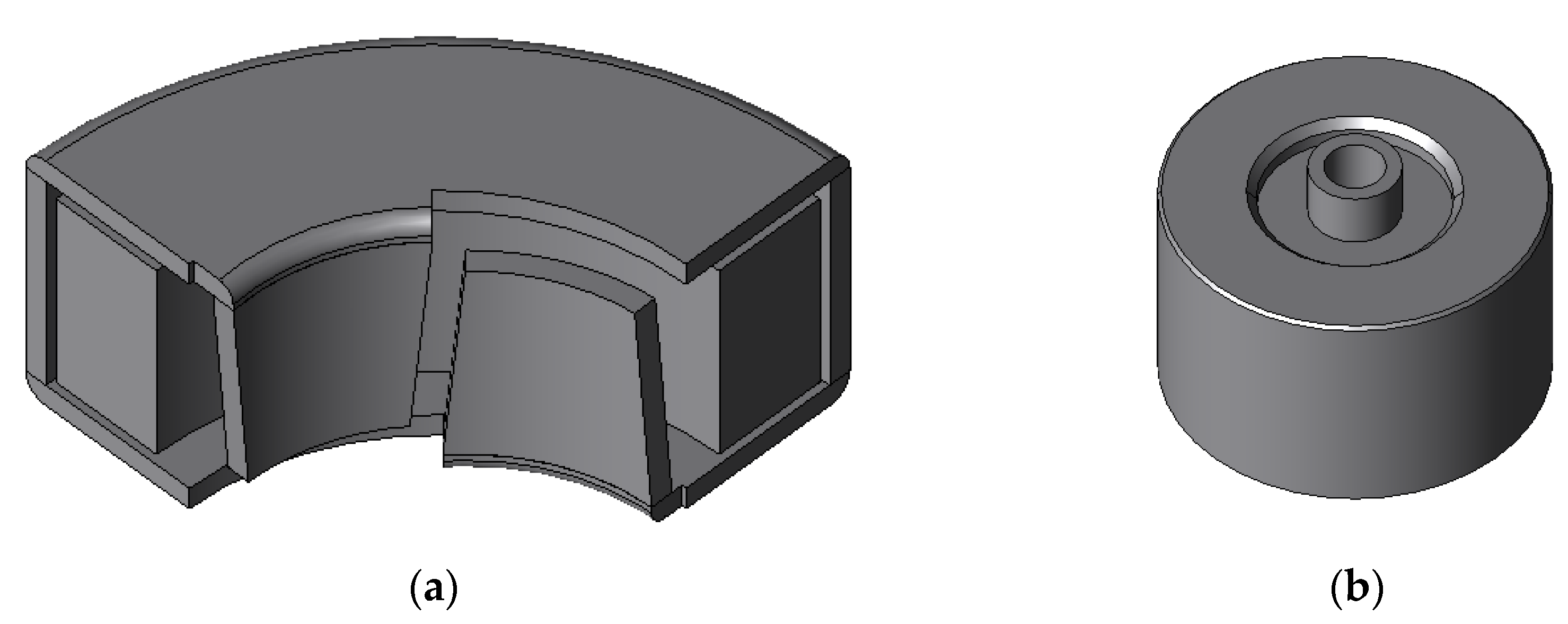
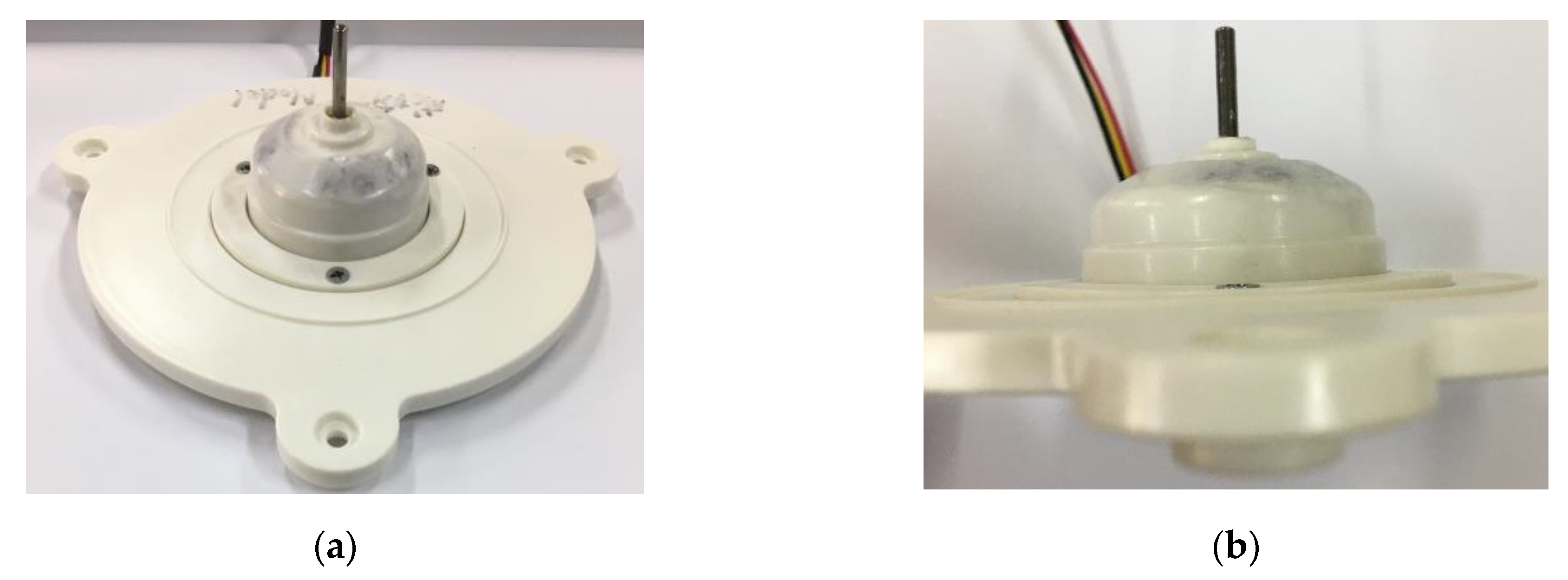
4.2. Specifications and Three-Dimensional Modeling
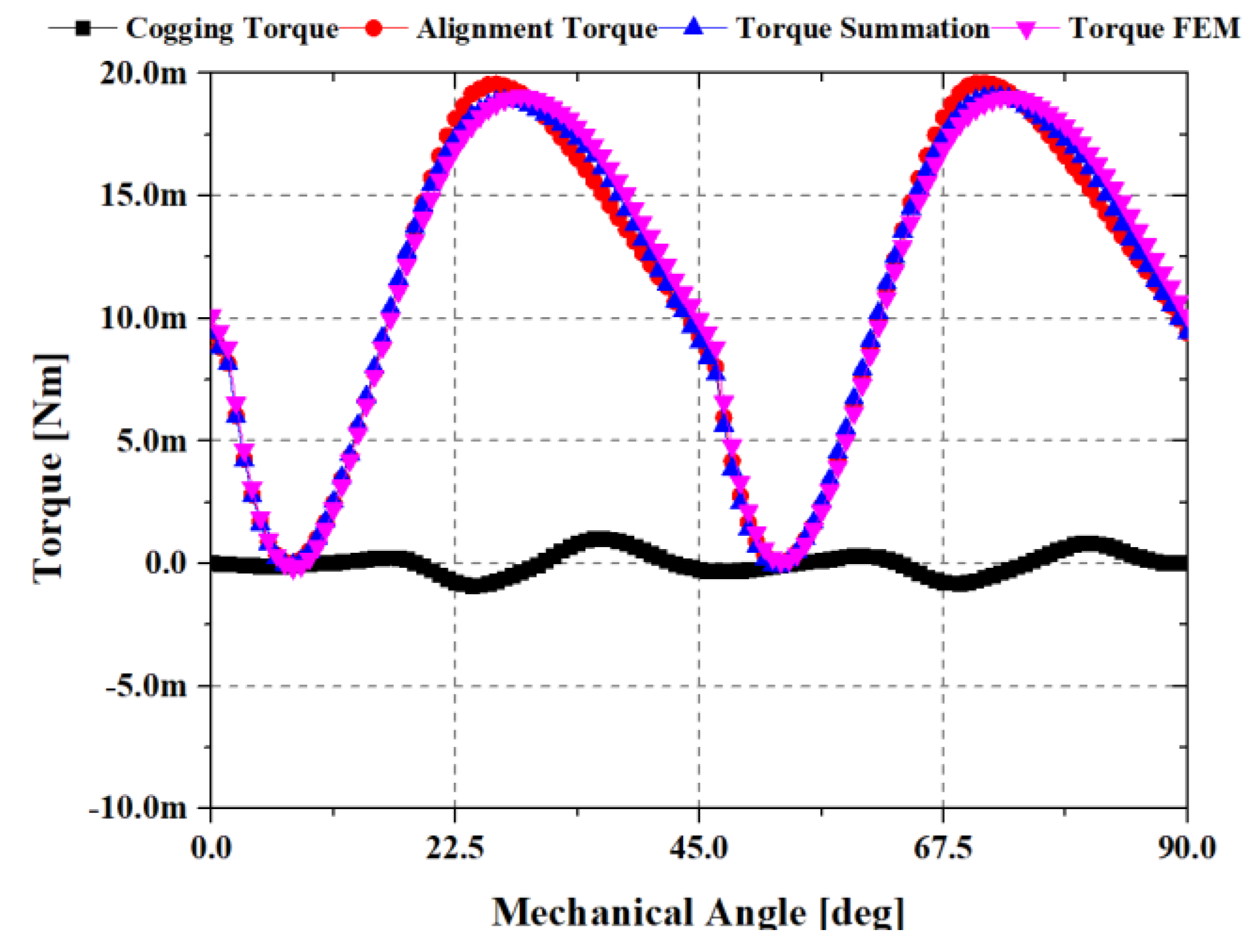
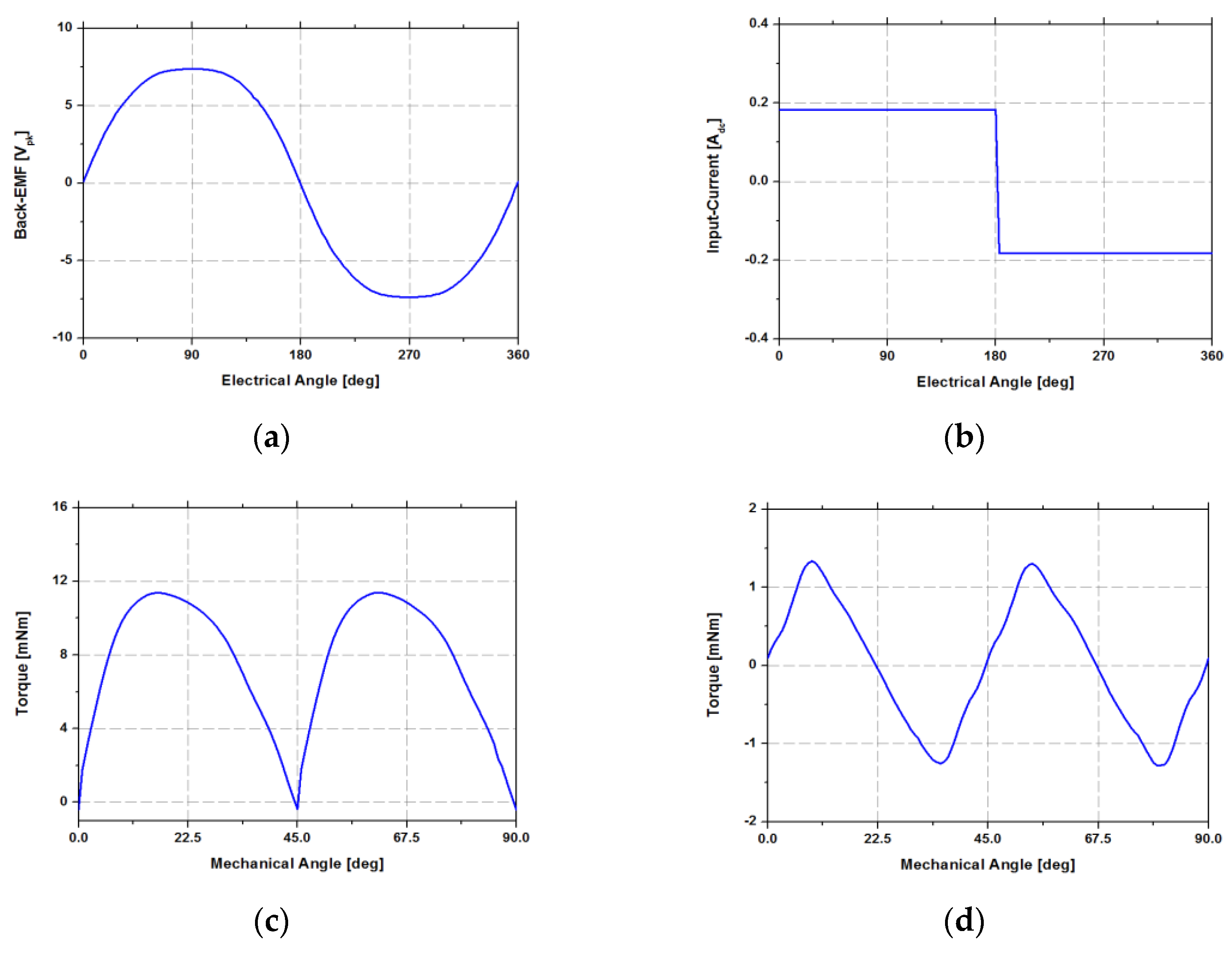
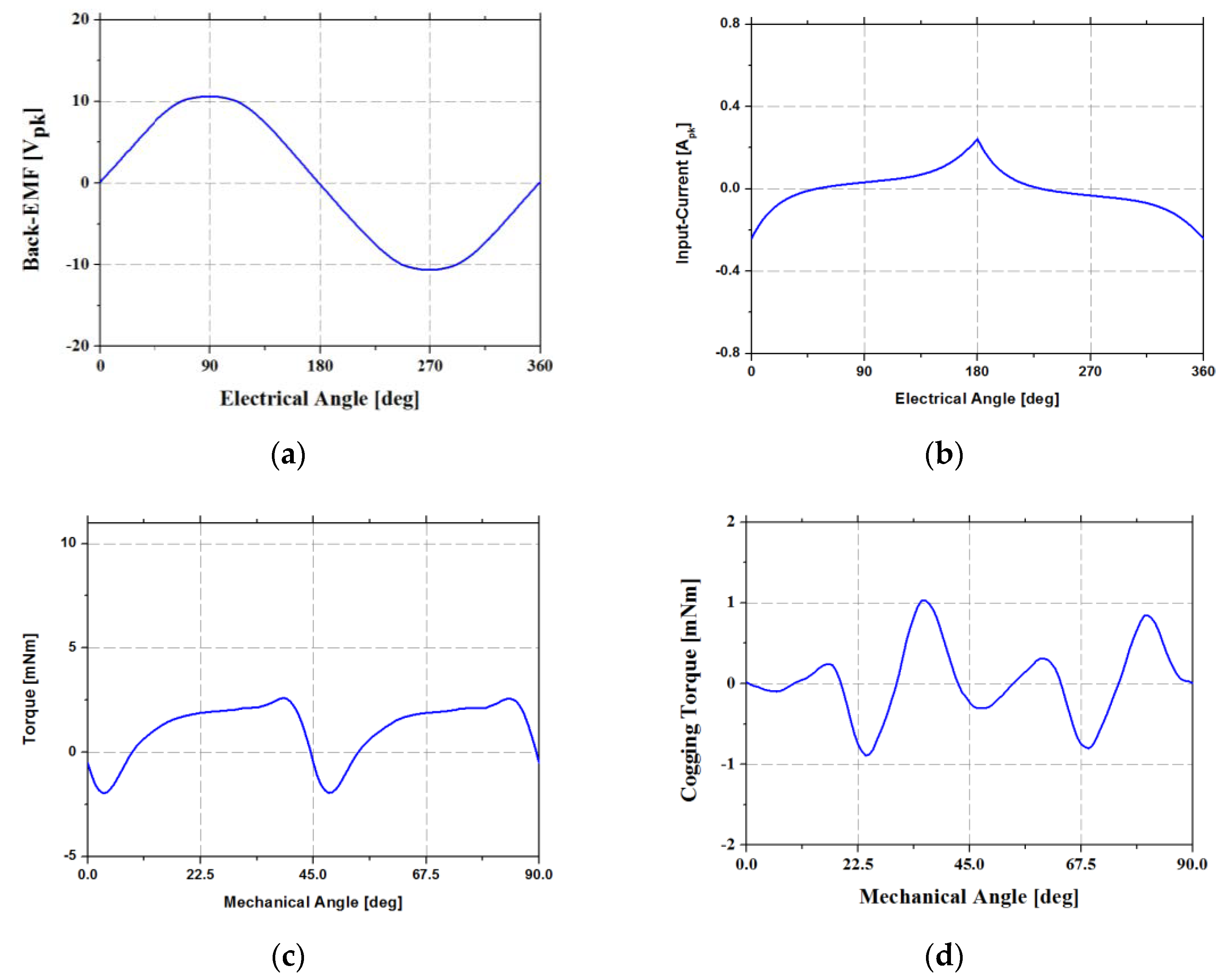
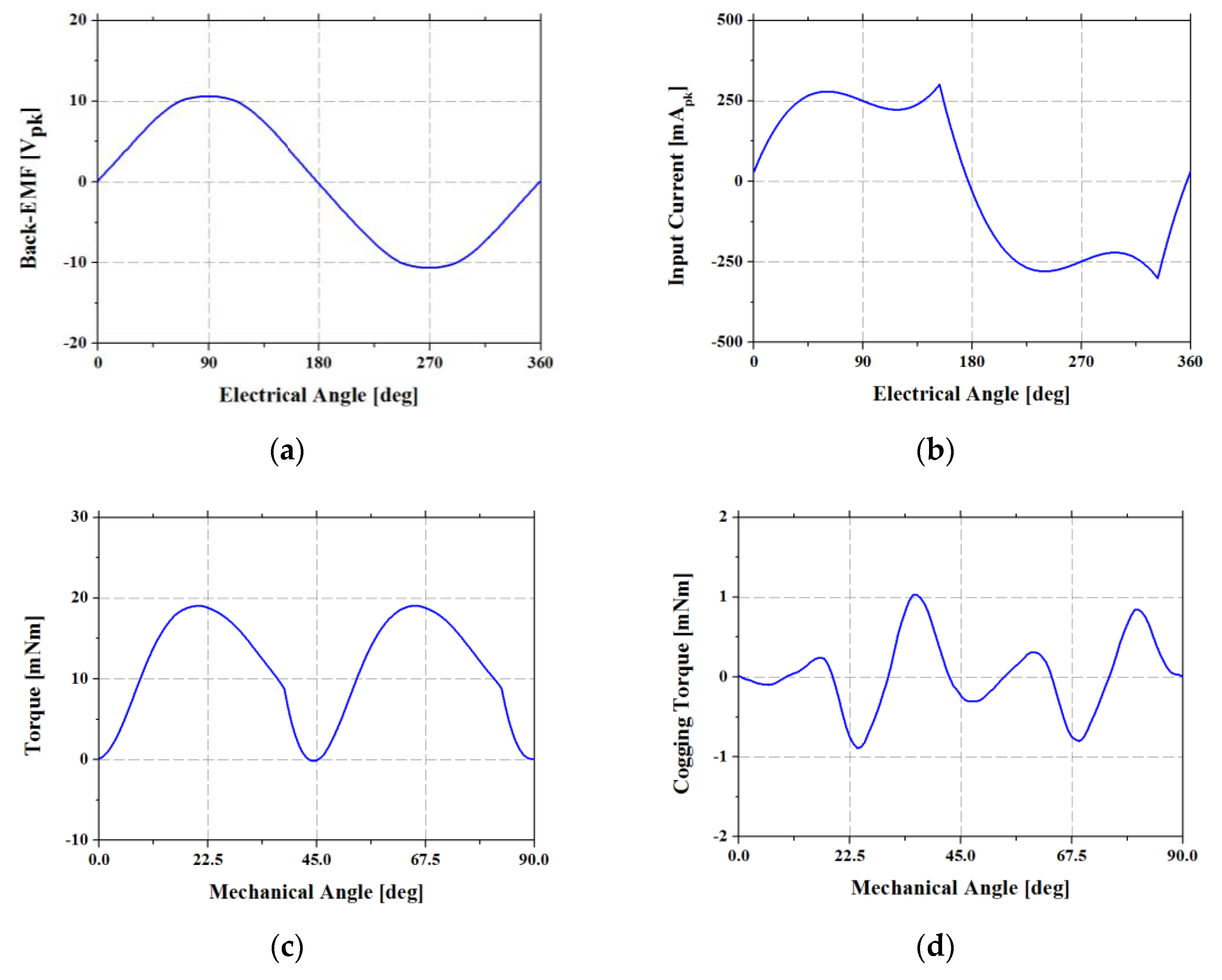
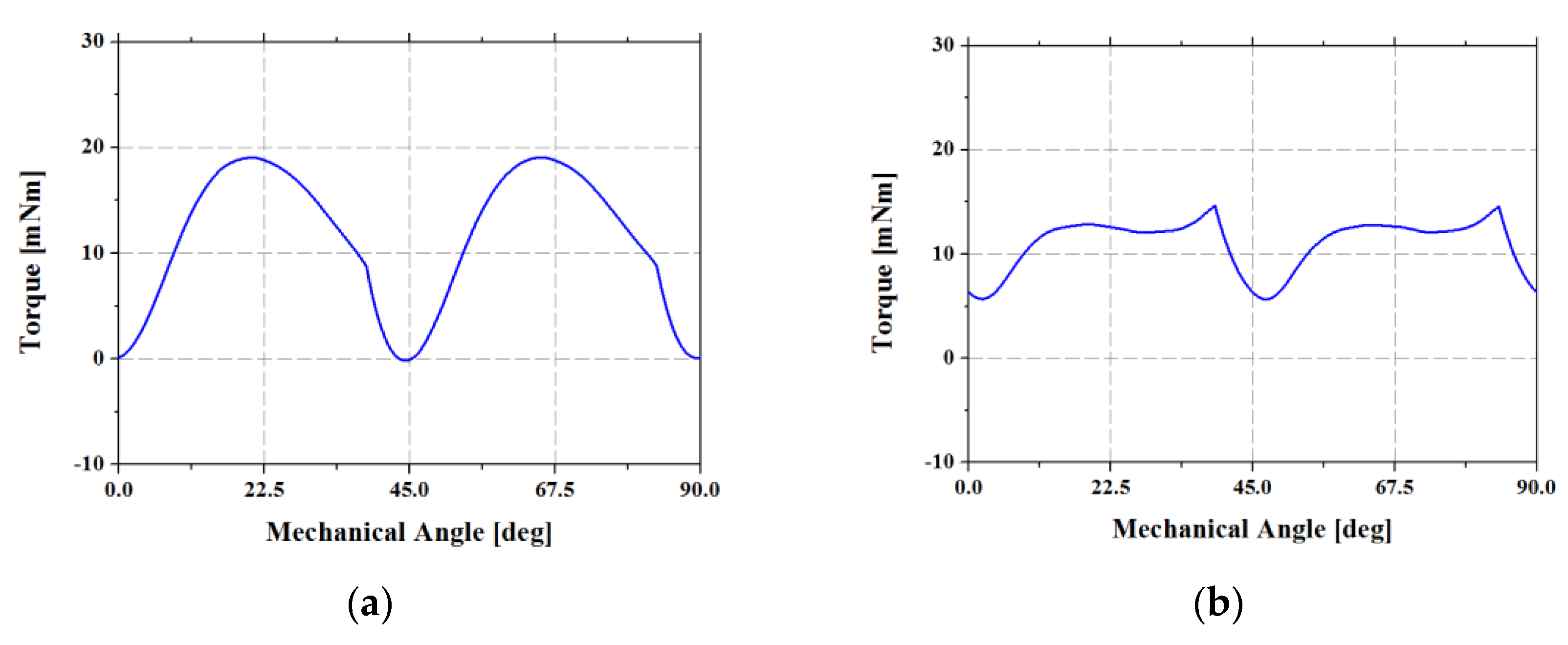
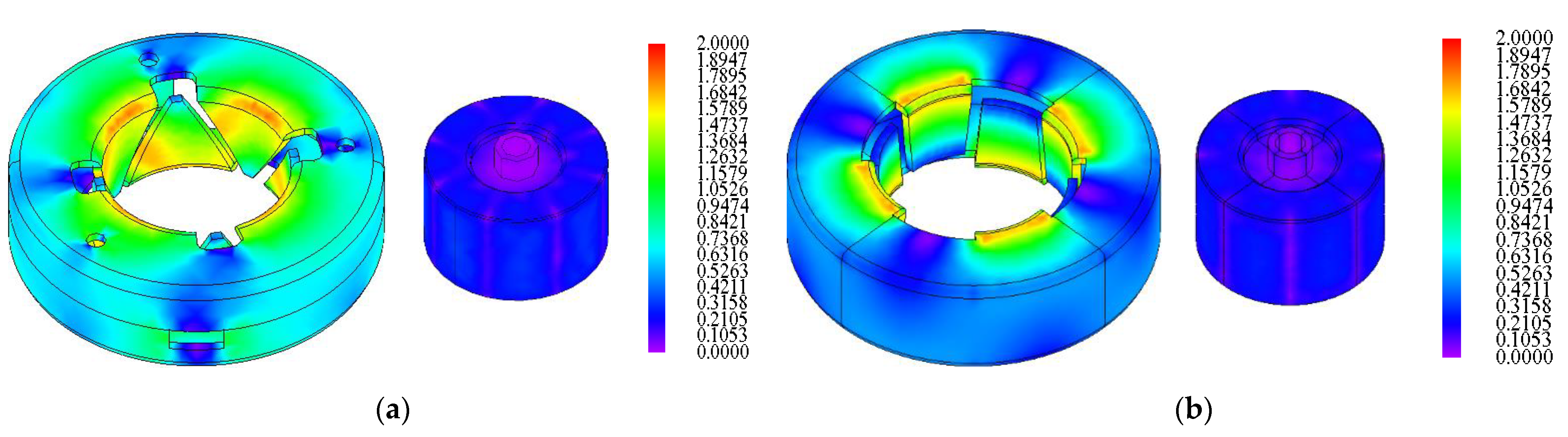
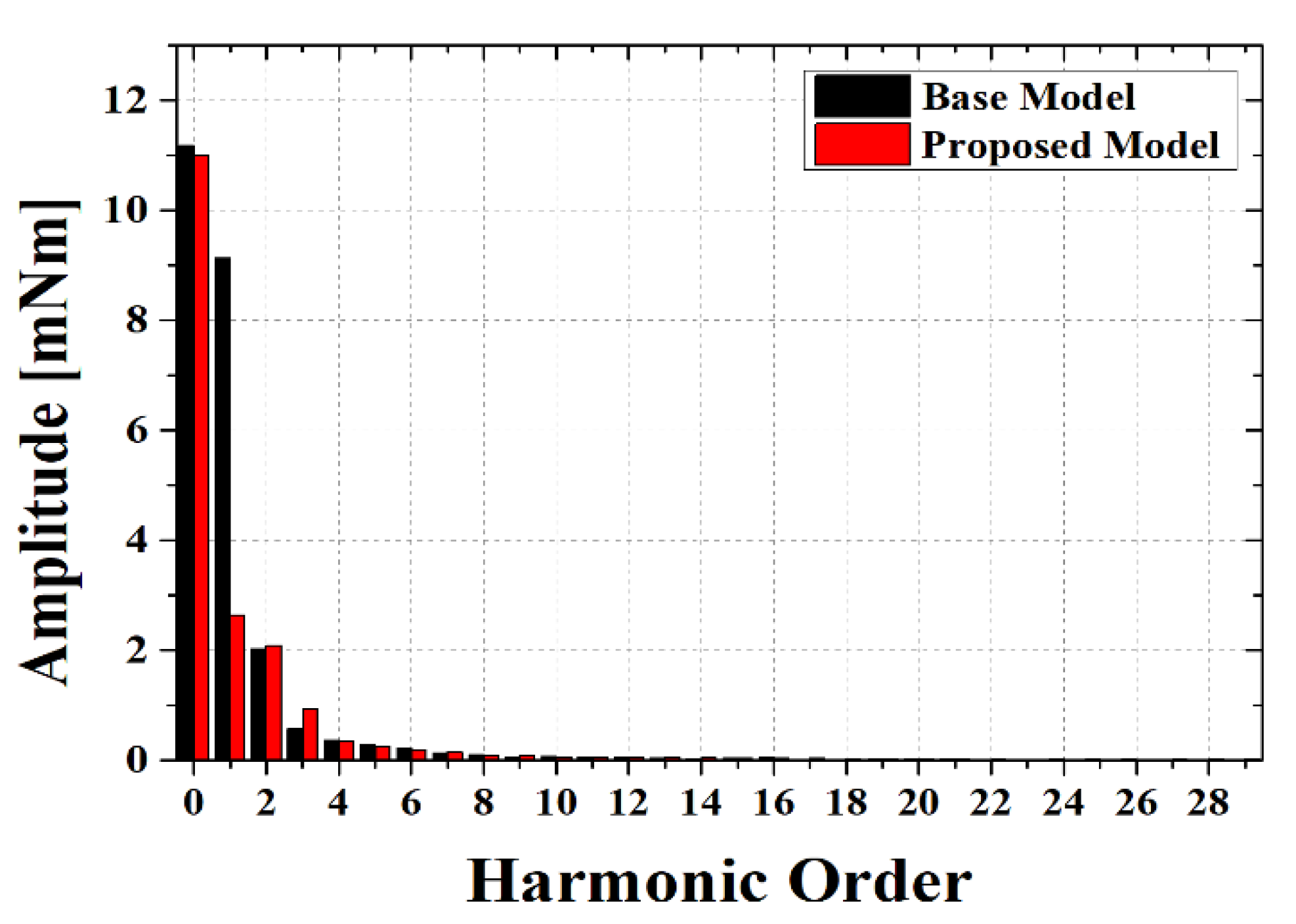
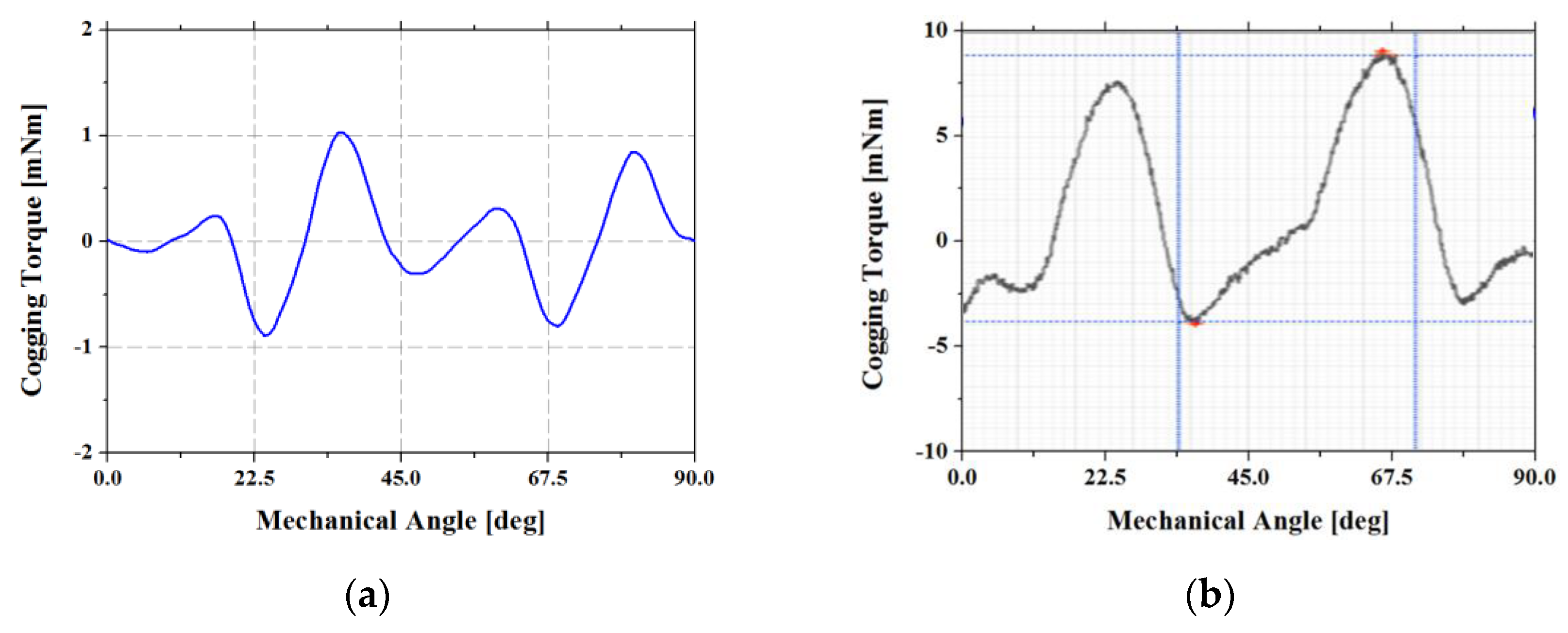
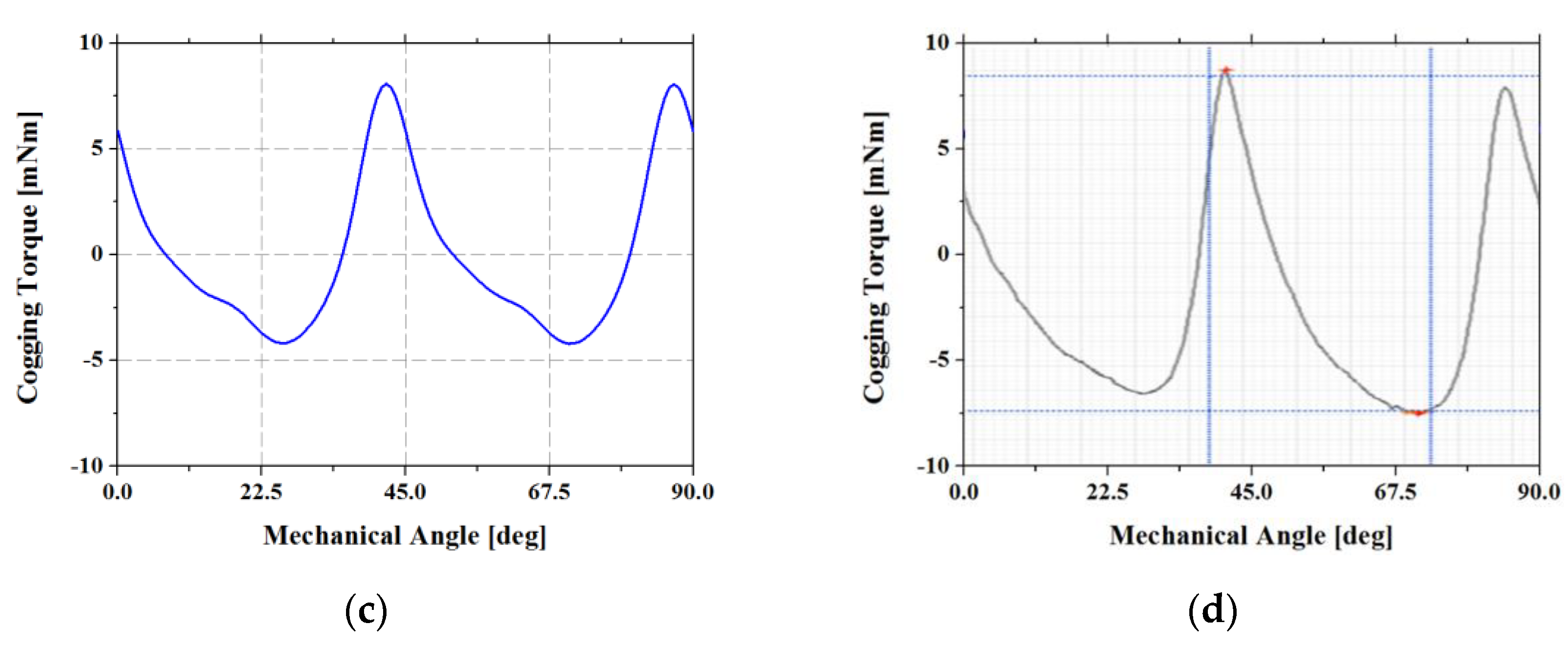
4.3. Analysis Results Using the Finite Element Method
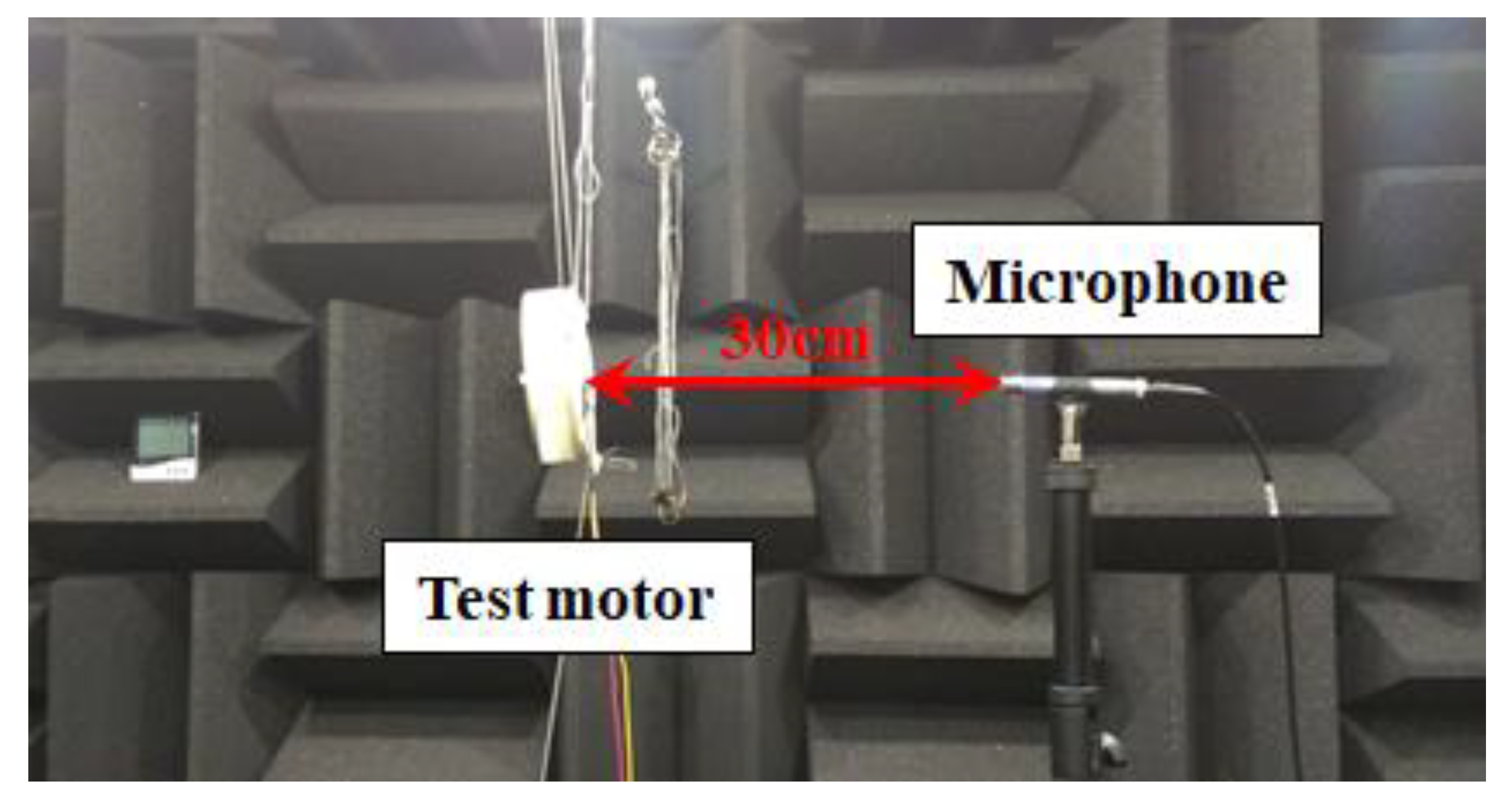
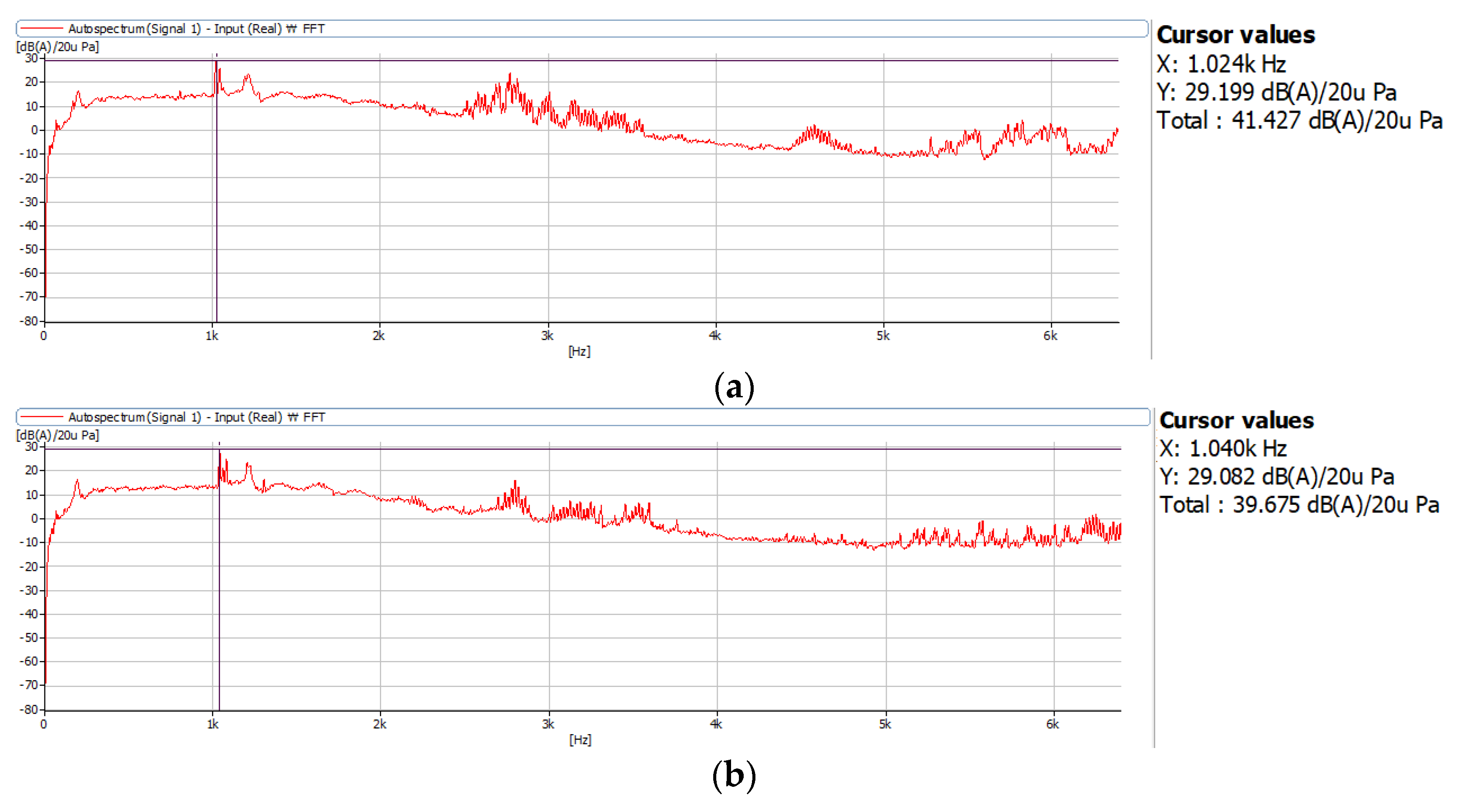
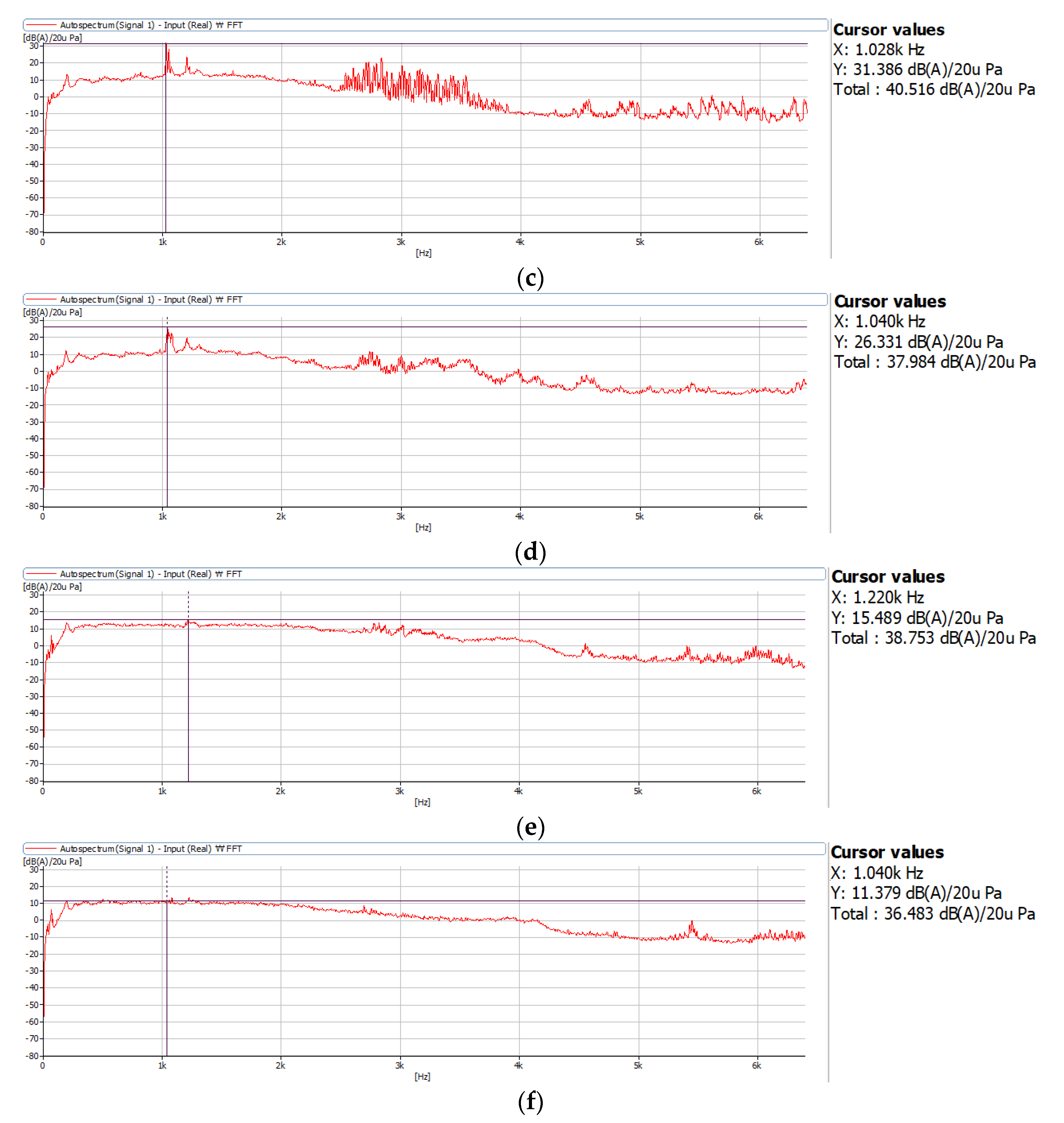
5. Experimental Test Result
- The measurement was performed with a microphone in a completely enclosed anechoic chamber.
- The measurement distance was 30 cm from the motor.
- The measurement was carried out by attaching the fan to the motor.
- The measurement was performed from the front, rear, and side of the motor.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dianov, A. Stoppage noise reduction of reciprocating compressors. IEEE Trans. Ind. Appl. 2021, 57, 4376–4384. [Google Scholar] [CrossRef]
- Niki, T. Power Electronics and Control Technologies for Household Washer. In Proceedings of the 2018 International Power Electronics Conference (IPEC-Niigata 2018-ECCE Asia), Niigata, Japan, 20–24 May 2018; pp. 856–859. [Google Scholar]
- Xu, M.; Liu, G.; Zhao, W. Torque Ripple Improvement for Ferrite-Assisted Synchronous Reluctance Motor by Using Asymmetric Flux-barrier Arrangement. In Proceedings of the 2018 IEEE International Magnetics Conference (INTERMAG), Singapore, 23–27 April 2018; p. 1. [Google Scholar]
- Babetto, C.; Bacco, G.; Bianchi, N. Synchronous reluctance machine optimization for high-speed applications. IEEE Trans. Energy Convers. 2018, 33, 1266–1273. [Google Scholar] [CrossRef]
- Lee, W.; Kim, J.H.; Choi, W.; Sarlioglu, B. Torque ripple minimization control technique of high-speed single-phase brushless DC motor for electric turbocharger. IEEE Trans. Veh. Technol. 2018, 67, 10357–10365. [Google Scholar] [CrossRef]
- Leitner, S.; Gruebler, H.; Muetze, A. Innovative low-cost sub-fractional hp BLDC claw-pole machine design for fan applications. IEEE Trans. Ind. Appl. 2019, 55, 2558–2568. [Google Scholar] [CrossRef]
- Leitner, S.; Gruebler, H.; Muetze, A. Cogging torque minimization and performance of the sub-fractional HP BLDC claw-pole motor. IEEE Trans. Ind. Appl. 2019, 55, 4653–4664. [Google Scholar] [CrossRef]
- Gruebler, H.; Leitner, S.; Muetze, A.; Schoener, G. Improved switching strategy for a single-phase brushless direct current fan drive and its impact on efficiency. IEEE Trans. Ind. Appl. 2018, 54, 6050–6059. [Google Scholar] [CrossRef]
- Park, S.; Kim, W.; Kim, S.I. A numerical prediction model for vibration and noise of axial flux motors. IEEE Trans. Ind. Electron. 2014, 61, 5757–5762. [Google Scholar] [CrossRef]
- Binojkumar, A.C.; Saritha, B.; Narayanan, G. Acoustic noise characterization of space-vector modulated induction motor drives—An experimental approach. IEEE Trans. Ind. Electron. 2015, 62, 3362–3371. [Google Scholar] [CrossRef]
- Fang, Y.; Zhang, T. Vibroacoustic characterization of a permanent magnet synchronous motor powertrain for electric vehicles. IEEE Trans. Energy Convers. 2018, 33, 272–280. [Google Scholar] [CrossRef]
- Zhu, H.; Xiao, X.; Li, Y. Torque ripple reduction of the torque predictive control scheme for permanent-magnet synchronous motors. IEEE Trans. Ind. Electron. 2012, 59, 871–877. [Google Scholar] [CrossRef]
- Wanjiku, J.; Khan, M.A.; Barendse, P.S.; Pillay, P. Influence of slot openings and tooth profile on cogging torque in axial-flux PM machines. IEEE Trans. Ind. Electron. 2015, 62, 7578–7589. [Google Scholar] [CrossRef]
- Cha, W.J.; Cho, Y.W.; Kwon, J.M.; Kwon, B.H. Highly efficient microinverter with soft-switching step-up converter and single-switch-modulation inverter. IEEE Trans. Ind. Electron. 2015, 62, 3516–3523. [Google Scholar]
- Choo, Y.; Hwang, H.; Cho, J.; Kim, C.; Kim, J.; Hwang, S.H.; Choi, J.Y.; Lee, C. Investigation of Systematic Efficiency in a High-Speed Single-Phase Brushless DC Motor Using Multi-Physics Analysis for a Vacuum Cleaner. IEEE Trans. Magn. 2019, 55, 1–6. [Google Scholar] [CrossRef]
- Kim, J.S.; Lee, J.H.; Kim, D.W.; Kim, Y.J.; Jung, S.Y. Design strategy for single phase claw-pole type motor considering design parameter. In Proceedings of the 2016 19th International Conference on Electrical Machines and Systems (ICEMS), Chiba, Japan, 13–16 November 2016; pp. 1–4. [Google Scholar]
- Hernando, M.M.; Fernández, A.; Arias, M.; Rodriguez, M.; Alvarez, Y.; Las-Heras, F. EMI radiated noise measurement system using the source reconstruction technique. IEEE Trans. Ind. Electron. 2008, 55, 3258–3265. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Variable (x) (mm) | ||
|---|---|---|---|
| 0.3 | 0.4 | 0.5 | |
| Max. Cogging Torque (%) | 6.26 | 7.05 | 7.88 |
| Category | Value |
|---|---|
| Motor type | Claw-pole |
| Number of phases | Single phase |
| Number of poles | 8 poles |
| Motor diameter (mm) | 41 |
| Stator height (mm) | 12 |
| Rotor height (mm) | 12.6 (Magnet overhang) |
| Air-gap length (mm) | 0.35 |
| Magnetic flux density of magnet | 0.28 |
| Target average torque (mNm) | 11.0 |
| Target torque ripple (%) | Less than 100 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, J.-H.; Jung, S.-Y. Noise Reduction Design with Trapezoidal Back-EMF and Asymmetric Air-Gap for Single-Phase BLDC Refrigerator Cooling Fan Motor. Energies 2021, 14, 5467. https://doi.org/10.3390/en14175467
Lee J-H, Jung S-Y. Noise Reduction Design with Trapezoidal Back-EMF and Asymmetric Air-Gap for Single-Phase BLDC Refrigerator Cooling Fan Motor. Energies. 2021; 14(17):5467. https://doi.org/10.3390/en14175467
Chicago/Turabian StyleLee, Jin-Hwan, and Sang-Yong Jung. 2021. "Noise Reduction Design with Trapezoidal Back-EMF and Asymmetric Air-Gap for Single-Phase BLDC Refrigerator Cooling Fan Motor" Energies 14, no. 17: 5467. https://doi.org/10.3390/en14175467
APA StyleLee, J. -H., & Jung, S. -Y. (2021). Noise Reduction Design with Trapezoidal Back-EMF and Asymmetric Air-Gap for Single-Phase BLDC Refrigerator Cooling Fan Motor. Energies, 14(17), 5467. https://doi.org/10.3390/en14175467