
Voltage Control of Multiphase Cage Induction Generators at a Speed Varying over a Wide Range


Abstract
:1. Introduction
2. Application Suggestions
3. Properties of MIMs and the Induced Generator Voltage
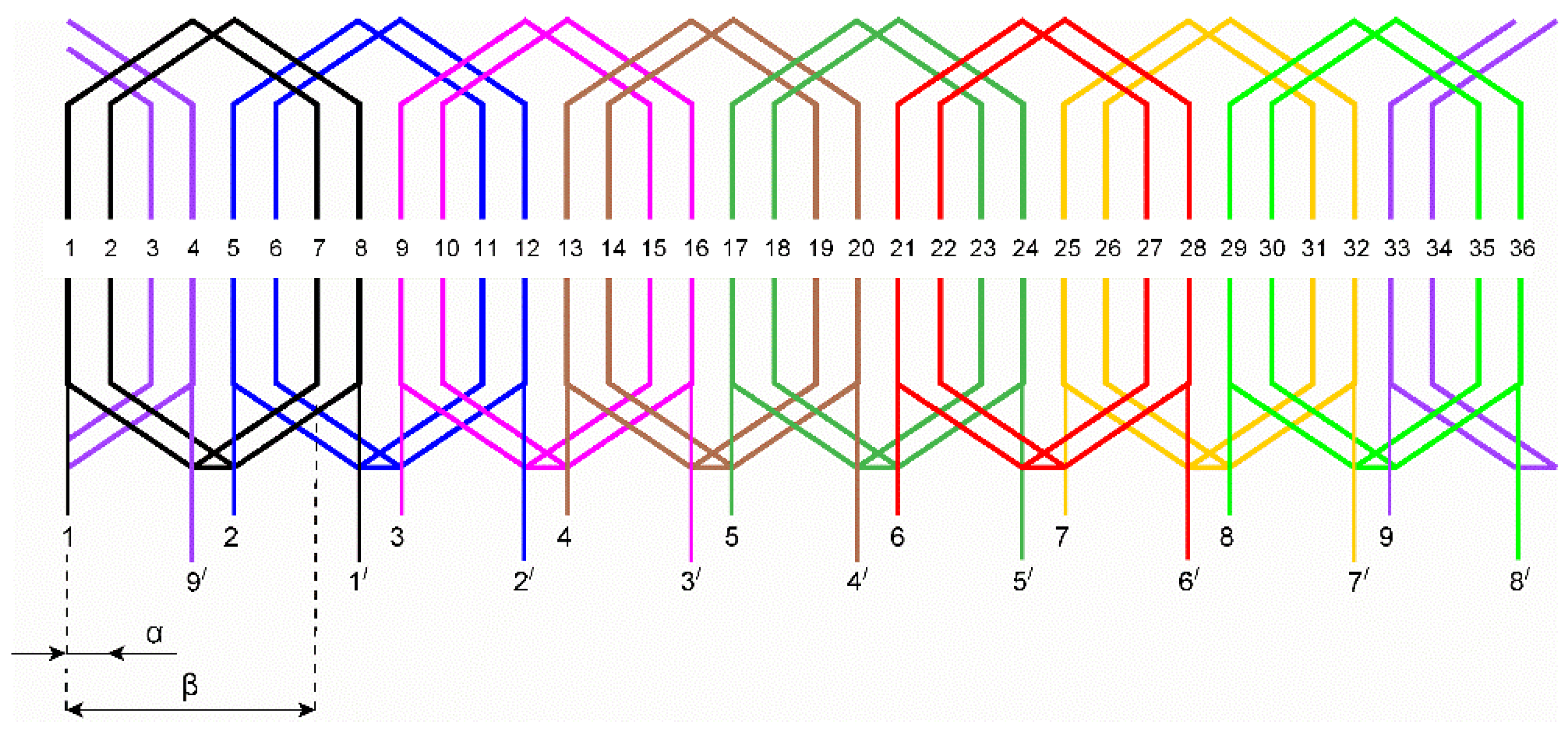
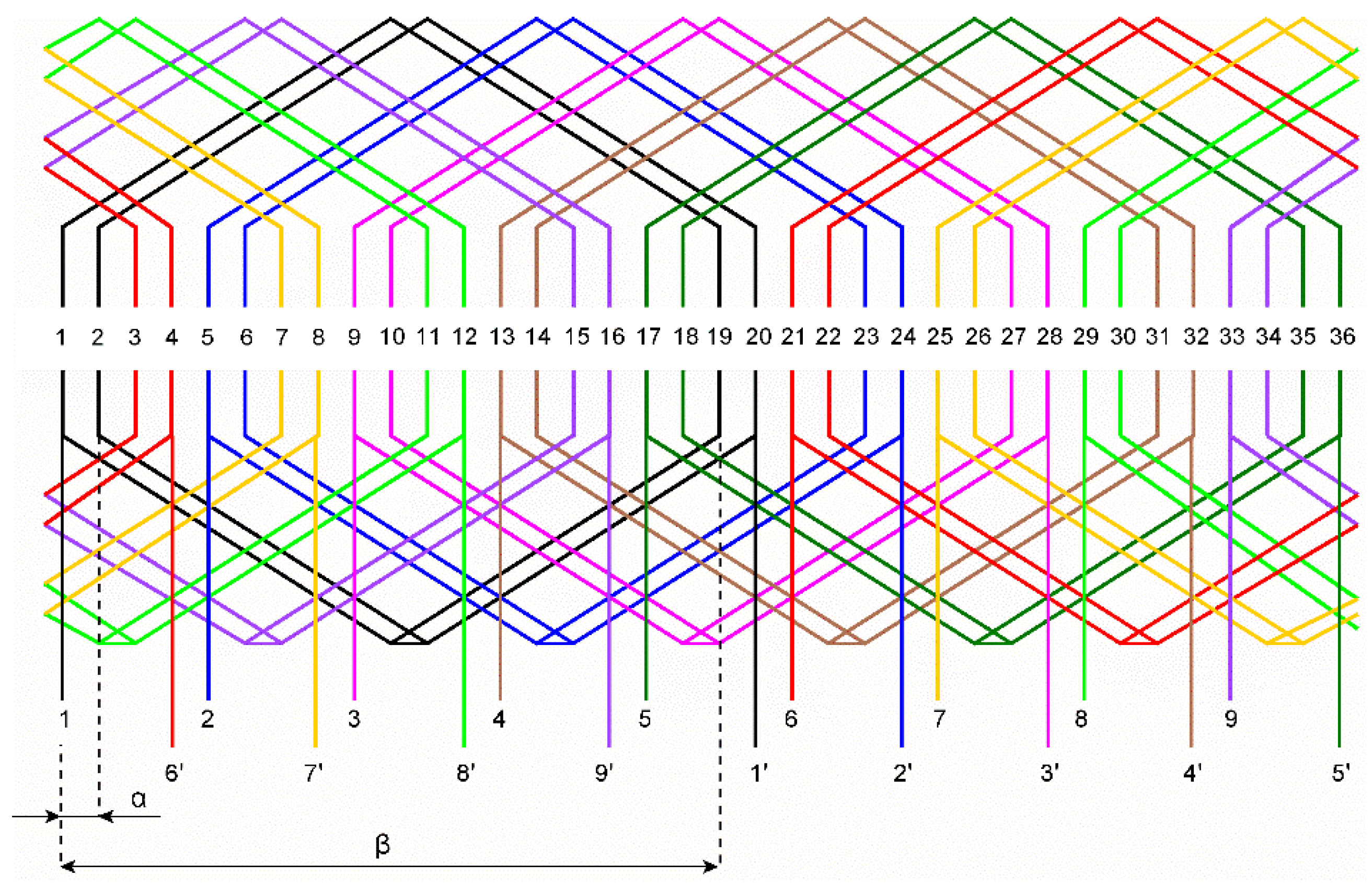
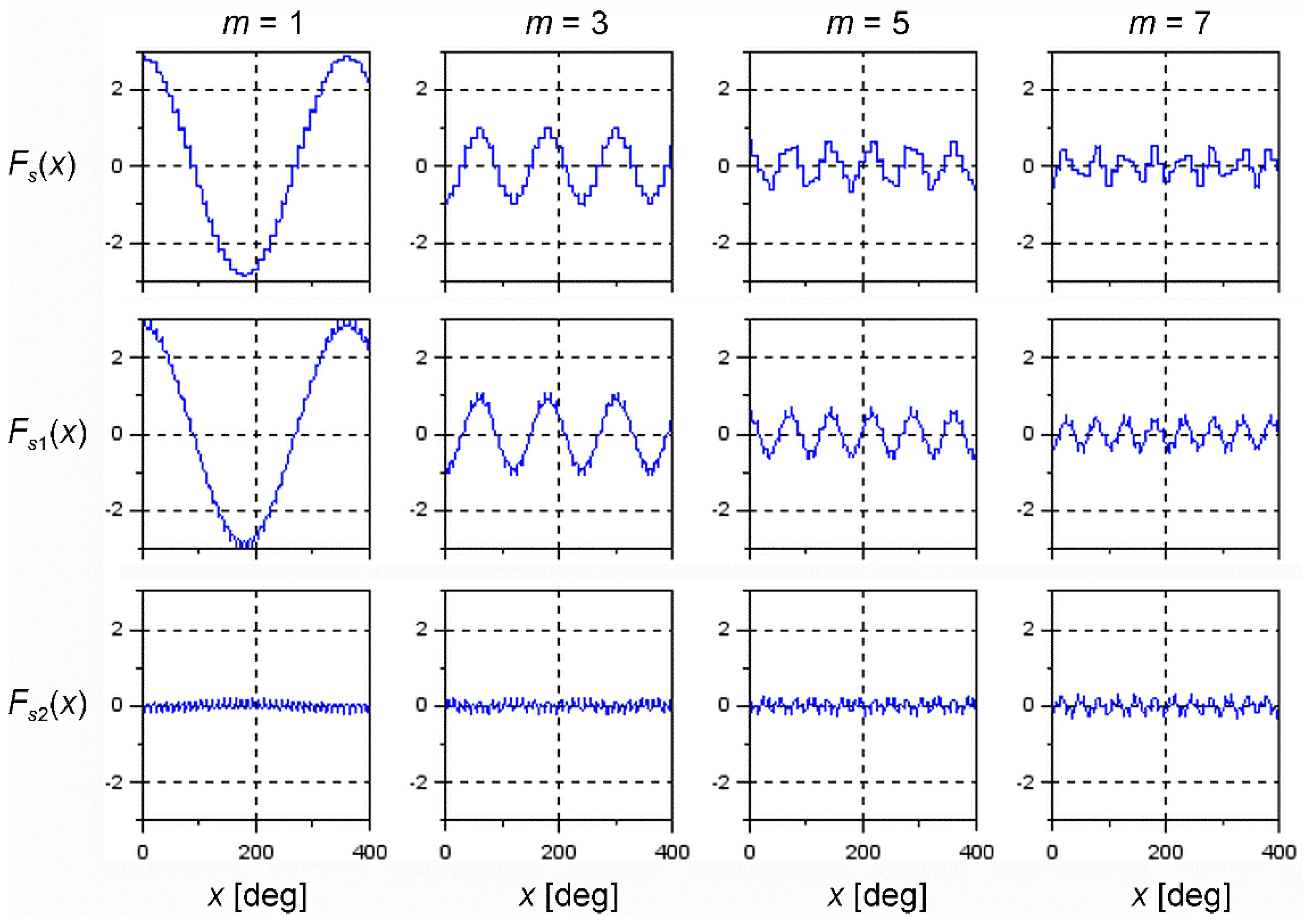
3.1. MMF Distribution and Main Properties
3.2. Induced No-Load Voltage
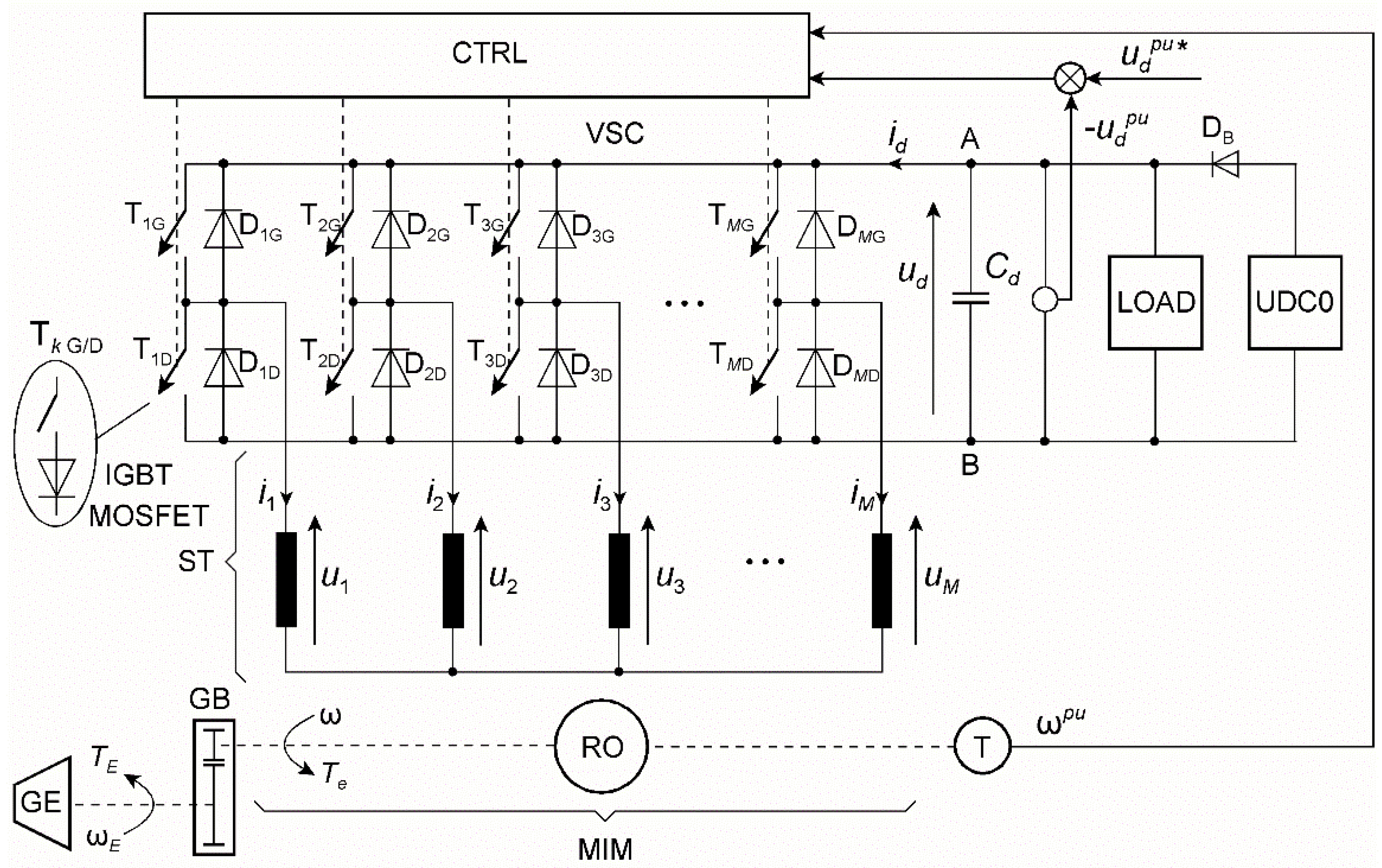
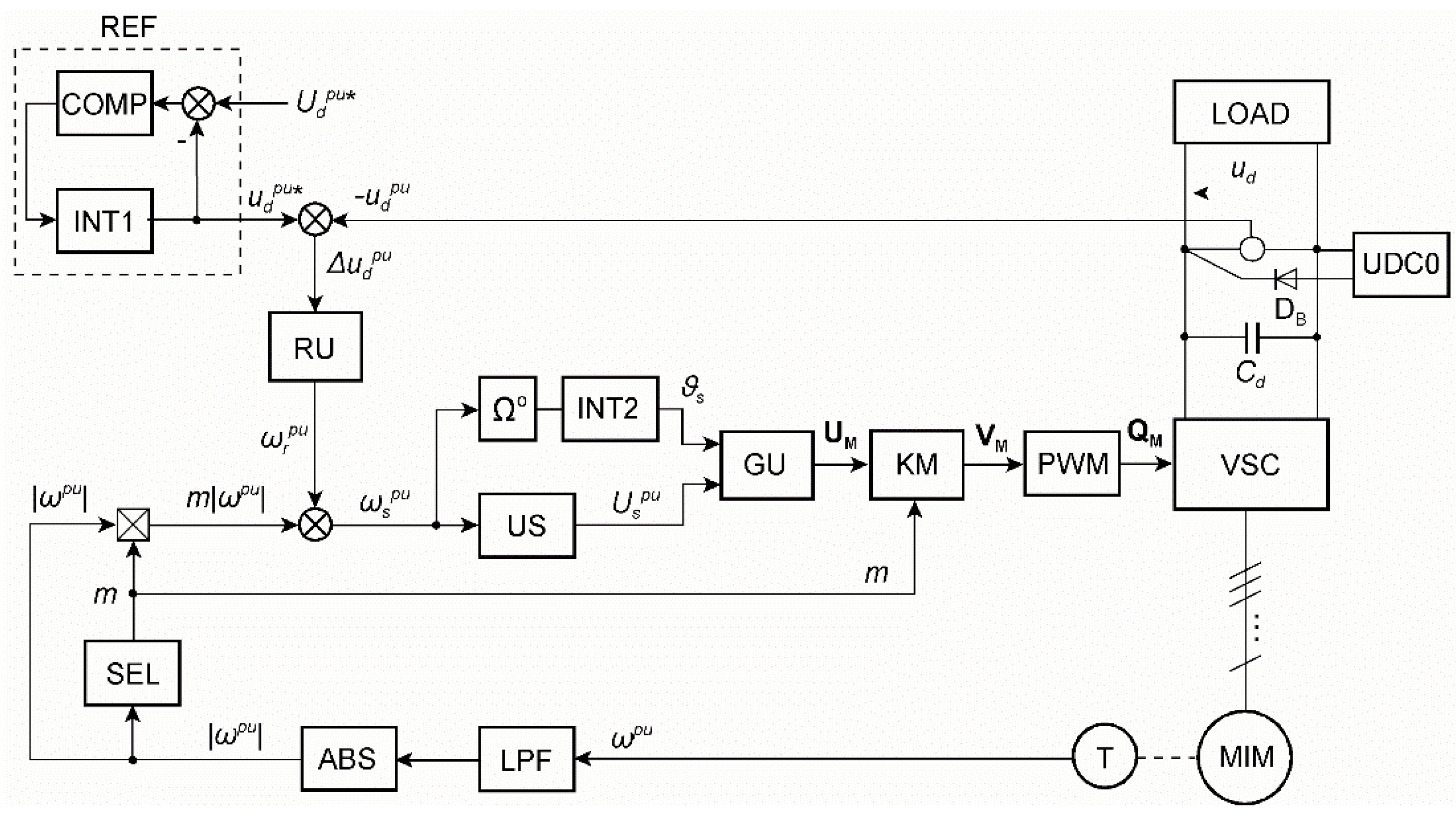
4. The Control System
5. Laboratory Tests of the Nine-Phase Induction Generator
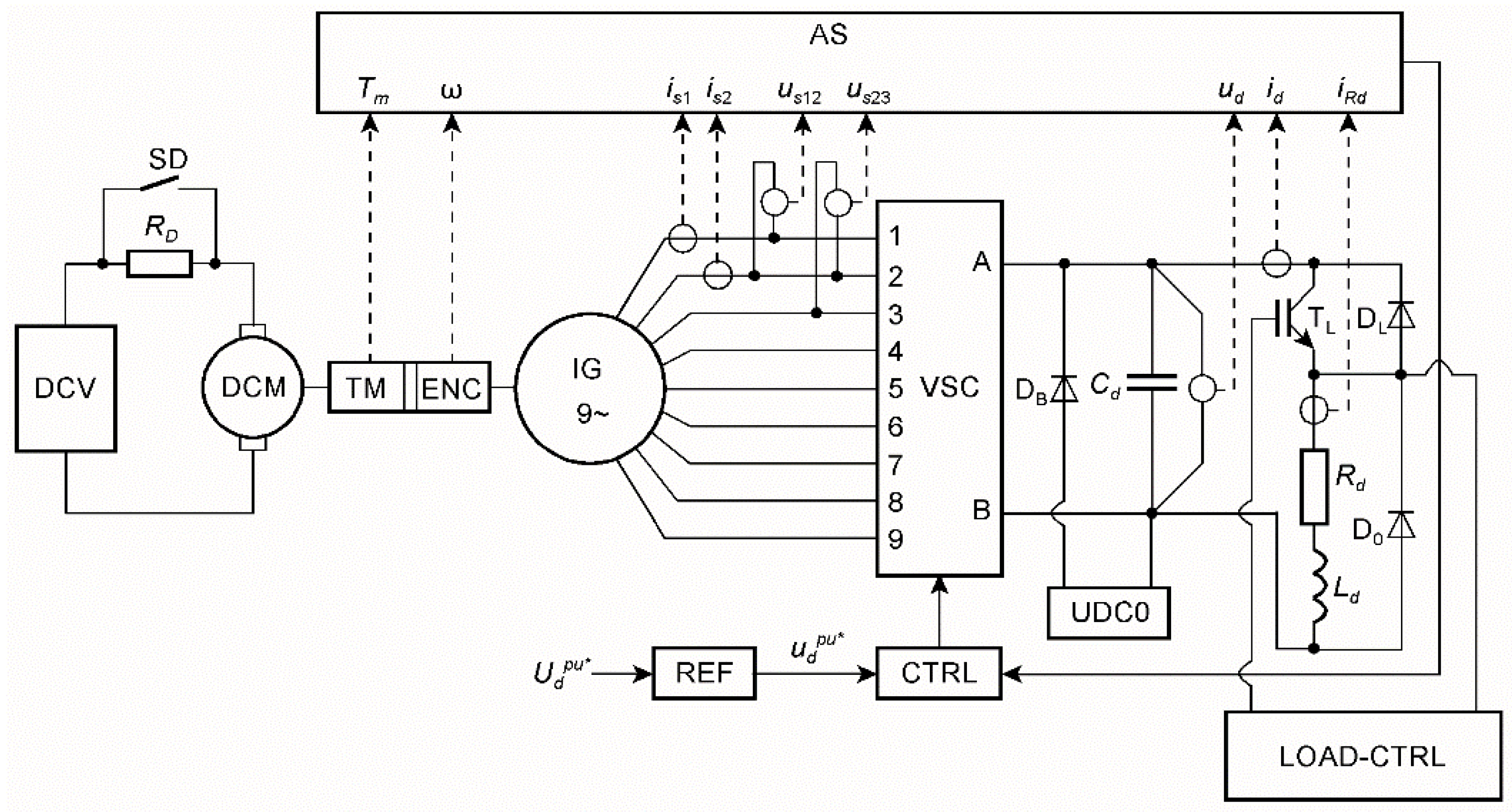
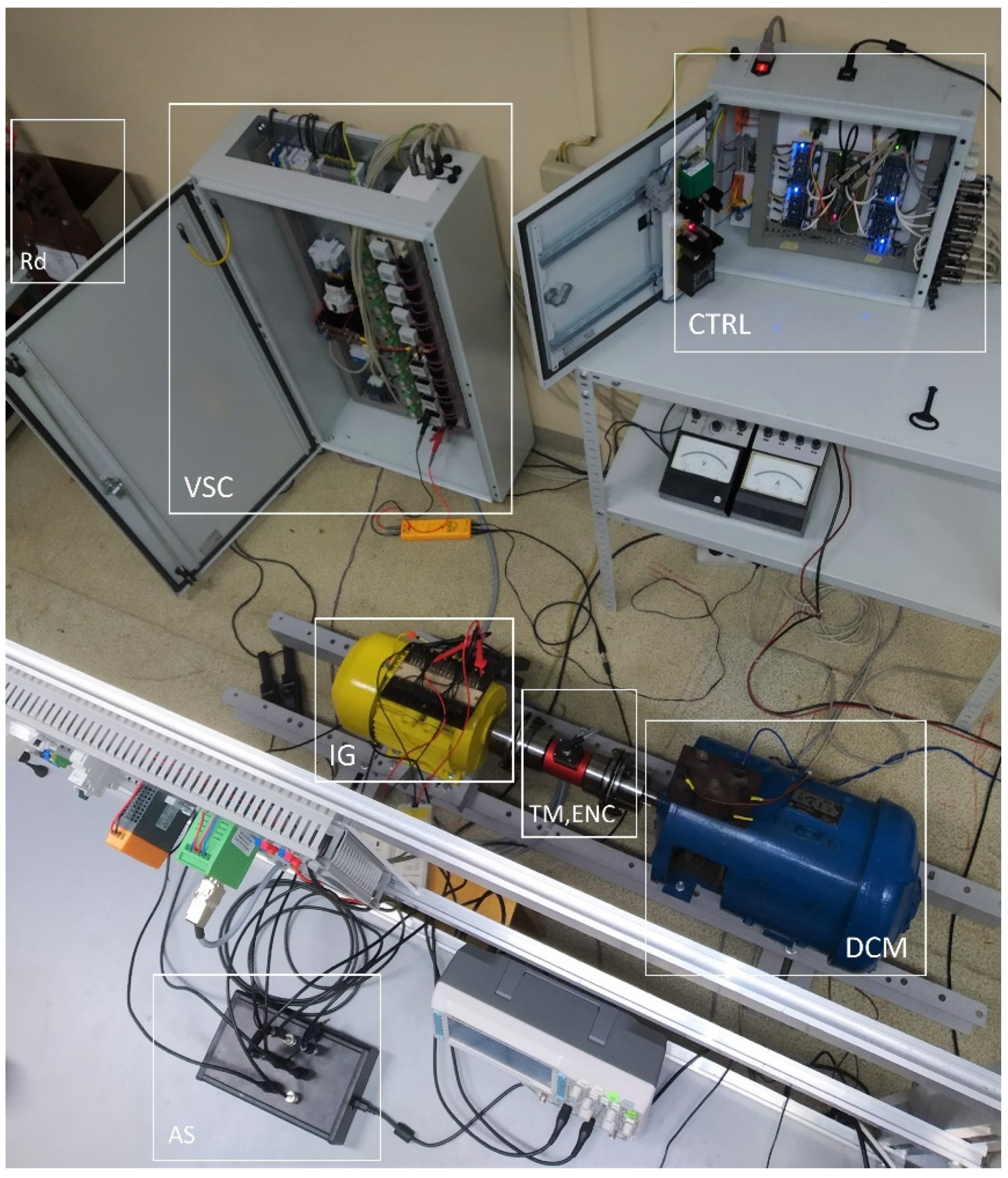
5.1. Measuring System
- Torque meter and encoder (TM, ENC): quadrature encoder 720 imp/rev with the speed sensor built-in DATAFLEX 32/300 torque meter.
- Control system (CTRL) based on digital signal controller: Texas Instruments TMS320F28379D.
- IGBT modules (VSC): Mitsubishi CM50DY-24H.
- Current measurement probes: Chauvin Arnoux E3N; voltage measurement probes: TESTEC TT-SI 9001, PINTEK DP-35.
- Data acquisition card (AS): National Instruments USB-6211.
- DC commutator motor (DCM): 4.5 kW, 220 V, 1460 rev/min.
- UDC0 charges capacitor Cd to initial voltage of = 80 V.
5.2. Experimental Tests
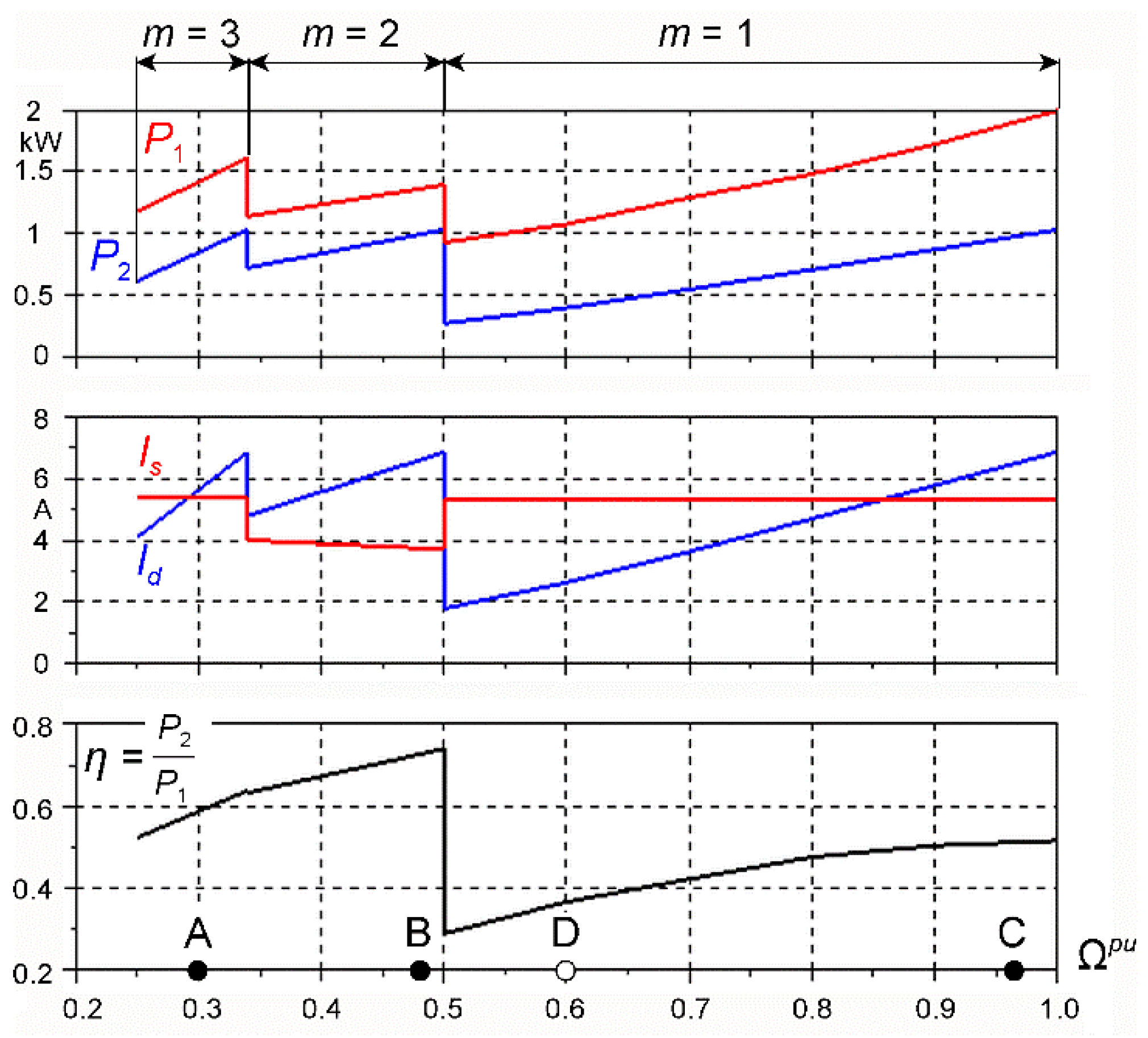
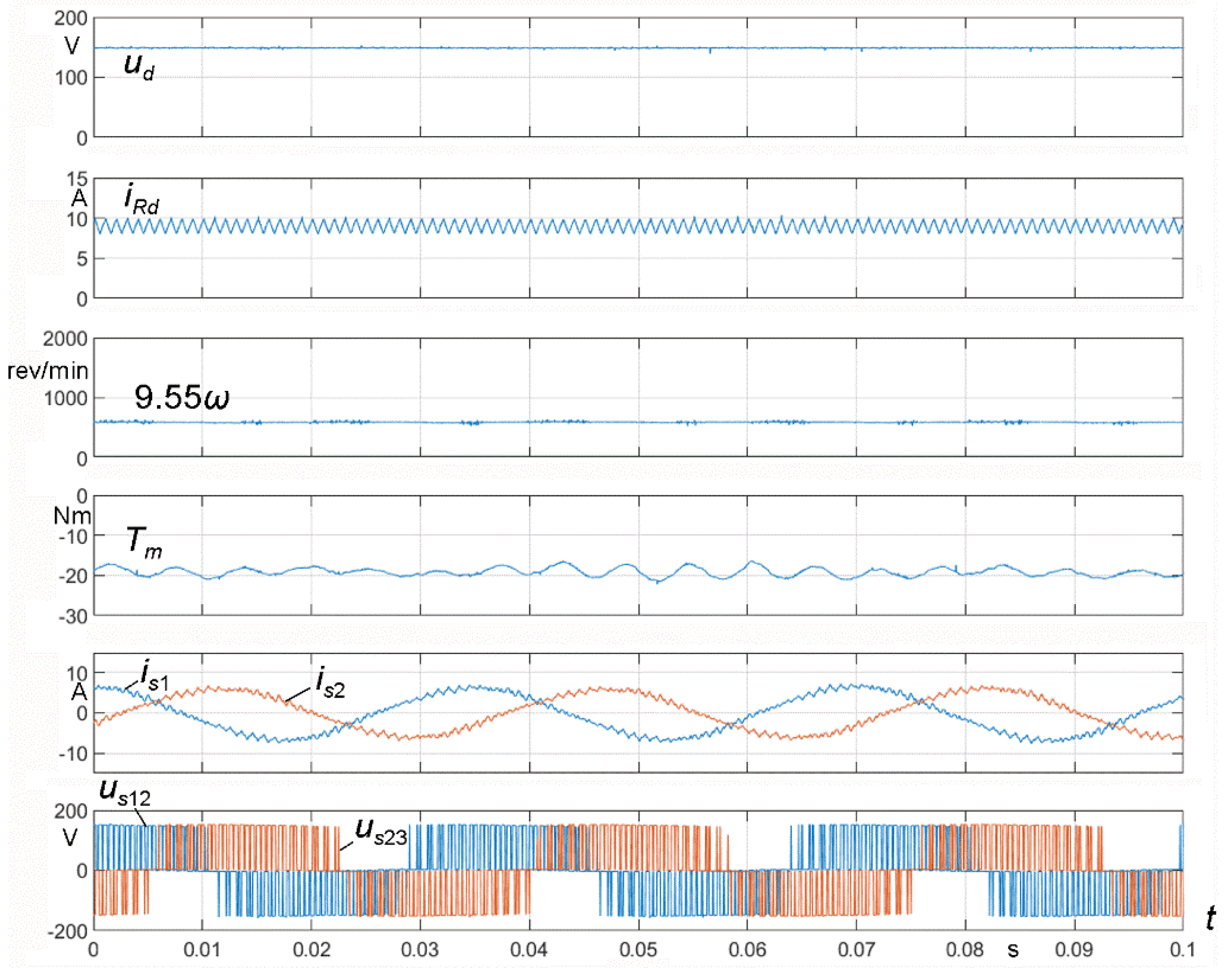
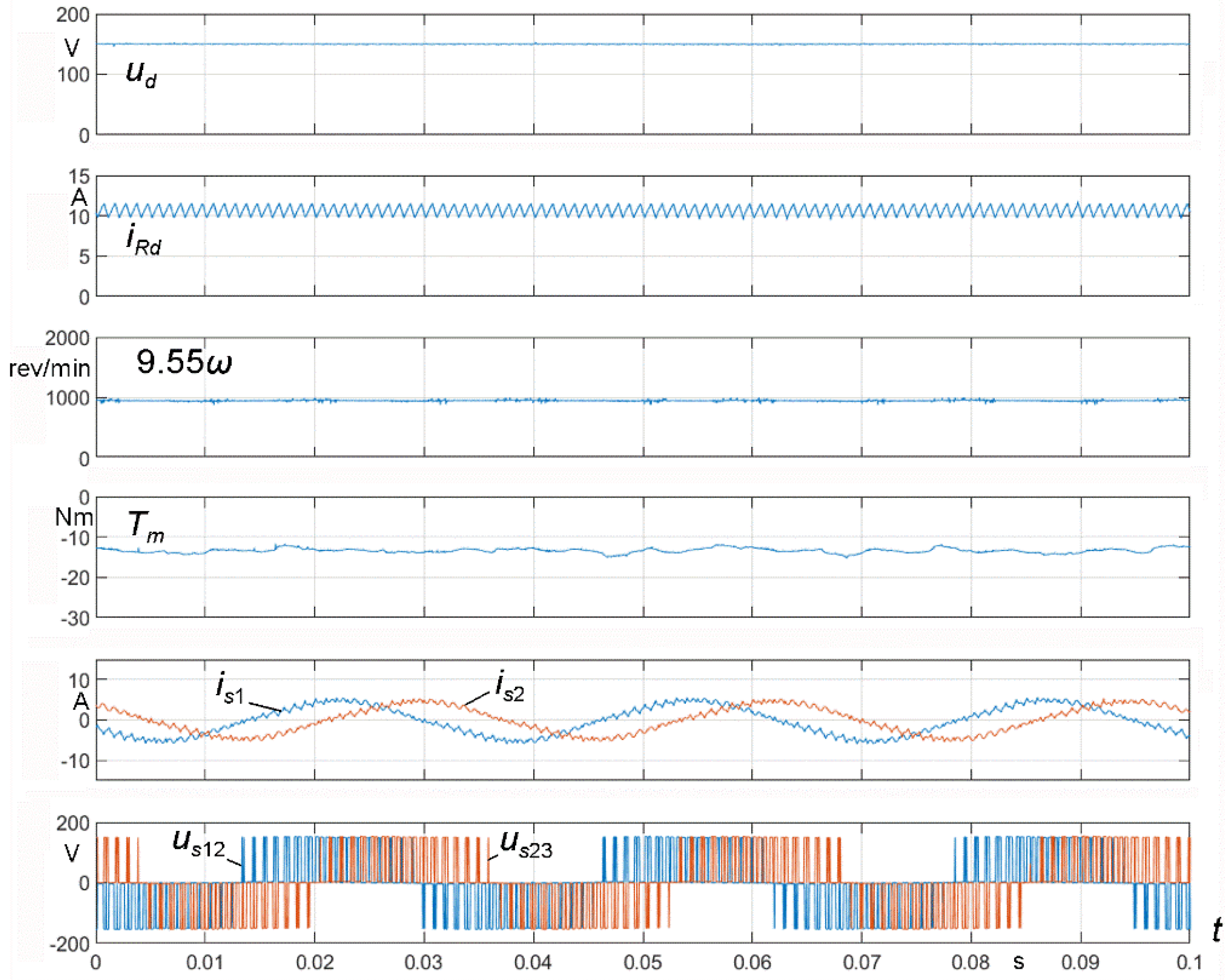
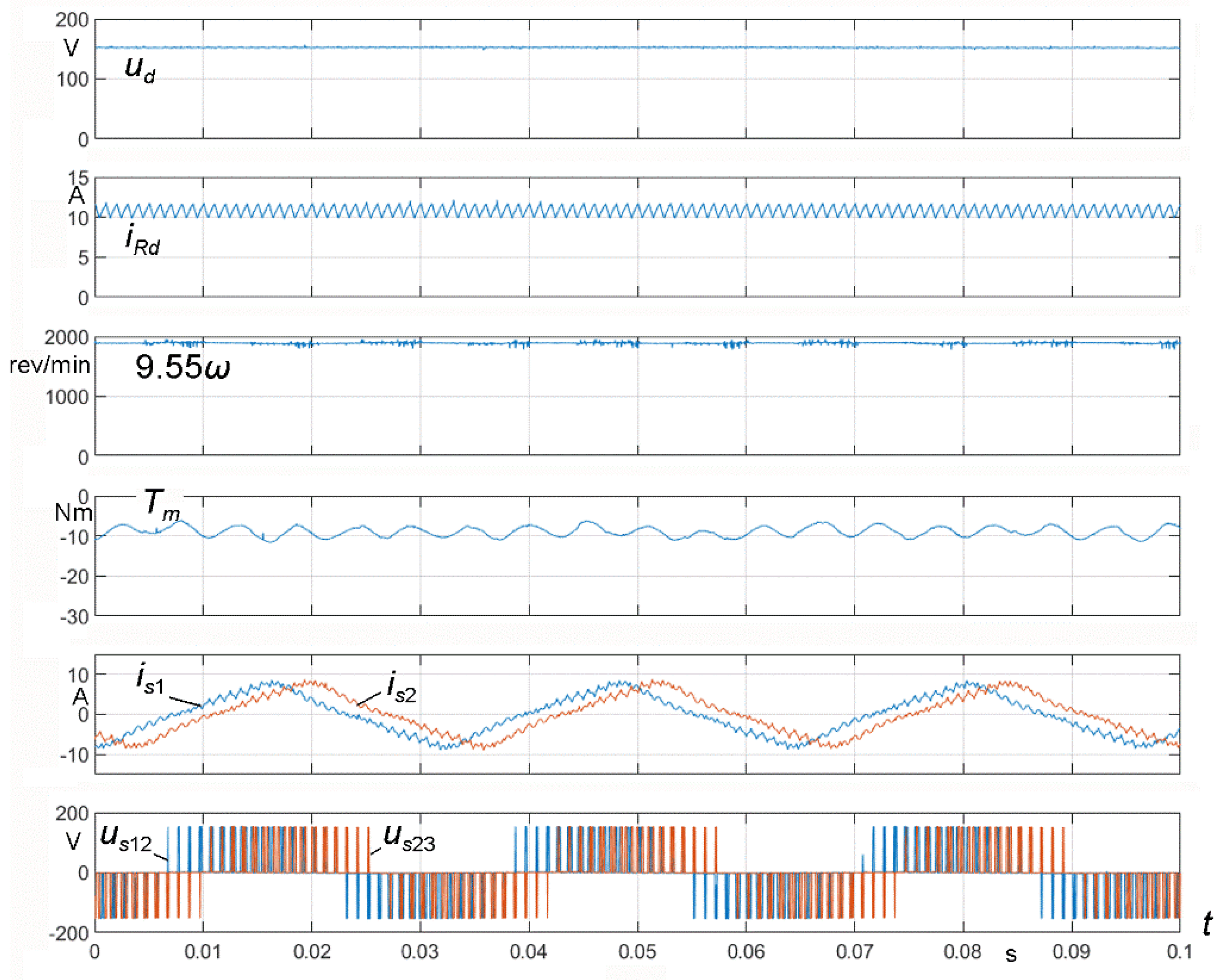
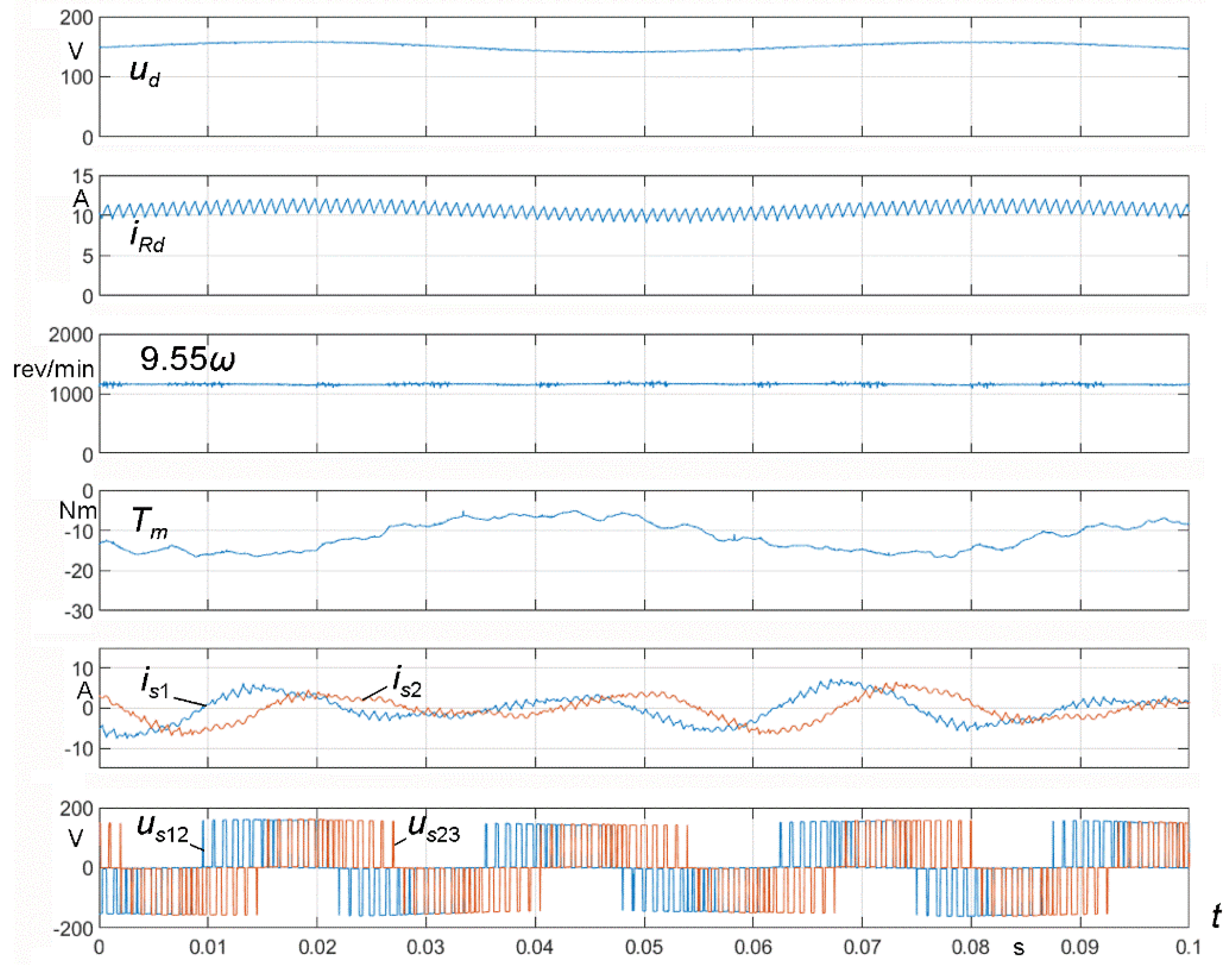
5.2.1. Steady-State Measurements
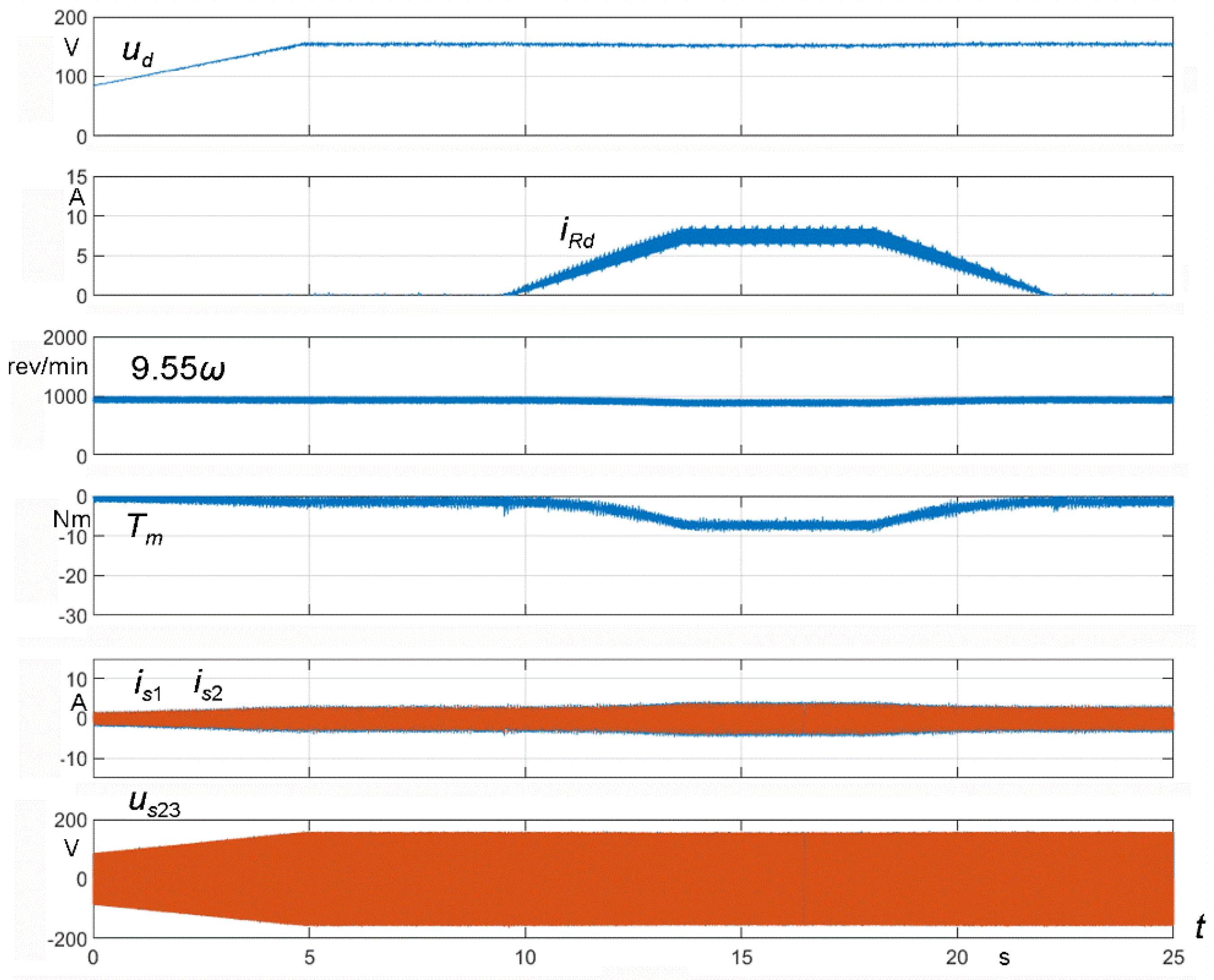
5.2.2. Example of Transient States
6. Conclusions
- A step change in voltage by switching the sequence of phase currents, causing a change in the number of poles of the magnetic field, extends the range of voltage regulation. The most useful is switching between = 2 and 3, between = 3 and 4, etc. Switching between = 1 and 2 at the speed causes difficulties in maintaining a sufficiently high efficiency of the generator.
- A multiphase induction generator has only one winding, allowing it to work with a varying number of pole pairs 1, 2, 3, 4, … When using a Dahlander winding in a three-phase machine, the number of pole pairs can be changed in a ratio of 1 to 2.
- The dimensions of a multiphase induction machine are similar to a three-phase machine with the same power. Cage induction machines are cheaper than synchronous generators with permanent magnets, which usually have to work with a back-boost converter.
- Multiphase induction generators can be used in wind and hydropower plants at significantly variable speeds. Even at relatively low speeds, a rated voltage will be produced.
- The best efficiency = 0.74 (Figure 13) was not significantly worse than the rated efficiency of the motor Sf112M-4 = 0.88 (the stator core and the cage rotor were used for the generator), since the generator was working below its rating.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Glossary
| flux density in the air-gap | |
| capacitance | |
| number of coils in the group creating the phase winding | |
| electromotive force | |
| magnetomotive force (MMF) | |
| stator frequency | |
| sets of harmonic orders | |
| current of k-th phase winding | |
| amplitude of stator phase current | |
| length of the stator core | |
| inductance | |
| number of phases | |
| supply sequence number | |
| number of sequences for one direction of rotation | |
| number of turns | |
| power | |
| number of pole pairs | |
| resistance | |
| stator core bore radius | |
| indicator of machine winding type | |
| torques | |
| voltage | |
| wind velocity | |
| number of stator slots | |
| slot angle | |
| pitch angle | |
| equivalent width of the machine air-gap | |
| phase angle | |
| vacuum permeability | |
| harmonic orders of MMF Fourier series | |
| magnetic flux | |
| instantaneous rotational speed | |
| steady-state rotational speed |
References
- Boldea, I. Variable Speed Generators (Electric Power Engineering Series); CRC, Taylor&Francis Group: Abingdon, UK, 2005; p. 552. ISBN 0849357152. [Google Scholar]
- Drozdowski, P.; Cholewa, D. Frequency control of a 9-phase induction motor at switched supply sequence. In Proceedings of the International Symposium on Electrical Machines (SME), Andrychów, Poland, 10–13 June 2018. [Google Scholar]
- Cholewa, D.; Drozdowski, P. Simulink modeling of multiphase induction motors. In Proceedings of the 14th Selected Issues of Electrical Engineering and Electronics (WZEE), Szczecin, Poland, 19–21 November 2018. [Google Scholar]
- Drozdowski, P.; Cholewa, D. Natural fault tolerance of a nine-phase induction motor drive operating at variable frequency and switched supply sequence. In Proceedings of the 15th Selected Issues of Electrical Engineering and Electronics (WZEE), Zakopane, Poland, 8–10 December 2019. [Google Scholar]
- Chen, Z.; Guerrero, J.M.; Blaabjerg, F. A review of the state of the art of power electronics for wind turbines. IEEE Trans. Power Electron. 2009, 24, 1859–1875. [Google Scholar] [CrossRef]
- Kumsuwan, Y.; Srirattanawichaikul, W.; Premrudeepreechacharn, S. A simple voltage and frequency control of VSI-inverter-fed self-excited induction generator drive. In Proceedings of the ICROS-SICE International Joint Conference, Fukuoka, Japan, 18–21 August 2009; pp. 430–434. [Google Scholar]
- Jakubowski, B.; Pieńkowski, K. Analysis and synthesis of converter control system of autonomous induction generator with field oriented control. Arch. Electr. Eng. 2013, 62, 267–279. [Google Scholar] [CrossRef]
- Levi, E. Advances in converter control and innovative exploitation of additional degrees of freedom for multiphase machines. IEEE Trans. Ind. Electron. 2016, 63, 433–448. [Google Scholar] [CrossRef] [Green Version]
- Chinmaya, K.A.; Singh, G.K. Modeling and experimental analysis of grid-connected six-phase induction generator for variable speed wind energy conversion system. Electr. Power Syst. Res. 2019, 166, 151–162. [Google Scholar] [CrossRef]
- Baroudi, J.A.; Dinavahi, V.; Knight, A.M. A review of power converter topologies for wind generators. Renew. Energy 2007, 32, 2369–2385. [Google Scholar] [CrossRef]
- Mengjie, L.; Lingxiang, W.; Zhen, X. Control strategy of wide-speed-range doubly fed induction generator, based on stator-winding short circuited in low speed mode. In Proceedings of the 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017. [Google Scholar] [CrossRef]
- Drozdowski, P. Speed control of multiphase cage induction motors incorporating supply sequence. Arch. Electr. Eng. 2014, 63, 511–534. [Google Scholar] [CrossRef]
- Thongam, J.S.; Bouchard, P.; Ezzaidi, H.; Ouhrouche, M. Wind speed sensorless maximum power point tracking control of variable speed wind energy conversion systems. In Proceedings of the 2009 IEEE International Electric Machines and Drives Conference, Miami, FL, USA, 3–6 May 2009; pp. 1832–1837. [Google Scholar] [CrossRef]
- Ciupageanu, D.A.; Berbece, V.; Tîrșu, M.; Galbura, V. Modeling and control of a low power wind turbine. In Proceedings of the 14th International Conference on Development and Application Systems, Suceava, Romania, 24–26 May 2018. [Google Scholar] [CrossRef]
- Ciupageanu, D.-A.; Gheorghe Lazaroiu, G.; Barelli, L. Wind energy integration: Variability analysis and power system impact assessment. Energy 2019, 185, 1183–1196. [Google Scholar] [CrossRef]
- Ramos, T.; Medeiros Junior, M.F.; Pinheiro, R.; Medeiros, A. Slip control of a squirrel cage induction generator driven by an electromagnetic frequency regulator to achieve the maximum power point tracking thales. Energies 2019, 12, 2100. [Google Scholar] [CrossRef] [Green Version]
- Pantea, A.; Yazidi, A.; Betin, F.; Carrière, S.; Sivert, A.; Vacossin, B.; Henao, H.; Capolino, G.-A. Fault-tolerant control of a low-speed six-phase induction generator for wind turbine. IEEE Trans. Ind. Appl. 2019, 55, 426–436. [Google Scholar] [CrossRef]
- Levi, E. Multiphase electric machines for variable-speed applications. IEEE Tran. Ind. Electron. 2008, 55, 1893–1908. [Google Scholar] [CrossRef]
- Duran, M.J.; Barrero, F. Recent advances in the design, modeling, and control of multiphase machines—Part II. IEEE Trans. Ind. Electron. 2016, 63, 459–468. [Google Scholar] [CrossRef]
- Talpone, J.I.; Puleston, P.F.; Cendoya, M.G.; Barrado-Rodrigo, J.A. A dual-stator winding induction generator based wind-turbine controlled via super twisting sliding mode. Energies 2019, 12, 4478. [Google Scholar] [CrossRef] [Green Version]
- Muljadi, E.; Butterfield, C.P.; Handman, D. Dual-speed wind turbine generation. In Proceedings of the National Renewable Energy Laboratory, Prepared for A WEA Windpower ’96, Denver, CO, USA, 23–27 June 1996; p. 11. [Google Scholar]
- Prieto, I.G.; Duran, M.J.; Garcia-Entrambasaguas, P.; Bermude, M. Field-oriented control of multiphase drives with passive fault tolerance. IEEE Tran. Ind. Electron. 2020, 67, 7228–7238. [Google Scholar] [CrossRef]
- Gonzalez-Prieto, A.; Aciego, J.J.; Gonzalez-Prieto, I.; Duran, M.J. Automatic fault-tolerant control of multiphase induction machines: A game changer. Electronics 2020, 9, 938. [Google Scholar] [CrossRef]
- Amimeur, H.; Aouzellag, D.; Abdessemed, R.; Ghedamsi, K. Sliding mode control of a dual-stator induction generator for wind energy conversion systems. Int. J. Electr. Power Energy Syst. 2012, 42, 60–70. [Google Scholar] [CrossRef]
- Gonzalez-Prieto, A.; Gonzalez-Prieto, I.; Duran, M.J.; Barrero, F. Efficient model predictive control with natural fault-tolerance in asymmetrical six-phase induction machines. Energies 2019, 12, 3989. [Google Scholar] [CrossRef] [Green Version]
- Gonzalez-Prieto, A.; Gonzalez-Prieto, I.; Yepes, A.G.; Duran, M.J.; Doval-Gandoy, J. Symmetrical six-phase induction machines: A solution for multiphase direct control strategies. In Proceedings of the 22nd IEEE International Conference on Industrial Technology (ICIT), Valencia, Spain, 10–21 March 2021; pp. 1362–1367. [Google Scholar]
- Drozdowski, P. Synthesis elements of polyphase windings for cage induction motors. Arch. Electr. Eng. 1999, 48, 63–68. [Google Scholar]
- Sobczyk, T.J.; Drozdowski, P. Inductances of electrical machine winding with a nonuniform air-gap. Arch. Elektrotechnik 1993, 76, 213–218. [Google Scholar] [CrossRef]
- Drozdowski, P. Equivalent circuit and performance characteristics of 9-phase cage induction motors. In Proceedings of the International Conference on Electrical Machines ICEM’94, Paris, France, 5–9 September 1994; Volume.1, pp. 118–123. [Google Scholar]
- Abdel-Khalik, A.S.; Massoud, A.; Ahmed, S. Standard three-phase stator frames for multiphase machines of prime-phase order: Optimal selection of slot/pole combination. IEEE Access 2019, 7, 78239–78259. [Google Scholar] [CrossRef]
- Abdel-Khalik, A.S.; Massoud, A.M.; Ahmed, S. Nine-phase six-terminal induction machine modelling using vector space decomposition. IEEE Trans. Ind. Electron. 2018, 66, 988–1000. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | First Type Winding (Figure 5) S = 1 | Second Type Winding (Figure 6) S = 2 | ||||||
|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 1 | 3 | 5 | 7 | |
| 8 | 7 | 6 | 5 | 17 | 15 | 13 | 11 | |
| 0.4980 | 0.8528 | 0.9659 | 0.8137 | 0.9961 | −0.9659 | 0.9063 | −0.8191 | |
| −0.6634 | −0.4095 | 0 | 0.4531 | 0.0871 | −0.2588 | 0.4226 | −0.5735 | |
| 0.498 | 0.426 | 0.322 | 0.203 | 0.996 | −0.322 | 0.181 | −0.117 | |
| −0.083 | 0.058 | 0 | 0.090 | 0.005 | −0.017 | 0.032 | 0.052 | |
| 0.248 | 0.182 | 0.103 | 0.041 | 0.992 | 0.103 | 0.033 | 0.013 | |
| Speed Range | Sequence Number |
|---|---|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Drozdowski, P.; Cholewa, D. Voltage Control of Multiphase Cage Induction Generators at a Speed Varying over a Wide Range. Energies 2021, 14, 7080. https://doi.org/10.3390/en14217080
Drozdowski P, Cholewa D. Voltage Control of Multiphase Cage Induction Generators at a Speed Varying over a Wide Range. Energies. 2021; 14(21):7080. https://doi.org/10.3390/en14217080
Chicago/Turabian StyleDrozdowski, Piotr, and Dariusz Cholewa. 2021. "Voltage Control of Multiphase Cage Induction Generators at a Speed Varying over a Wide Range" Energies 14, no. 21: 7080. https://doi.org/10.3390/en14217080
APA StyleDrozdowski, P., & Cholewa, D. (2021). Voltage Control of Multiphase Cage Induction Generators at a Speed Varying over a Wide Range. Energies, 14(21), 7080. https://doi.org/10.3390/en14217080