1. Introduction
The aim of this article is to analyze the possibility of reducing energy consumption during the procedure of approaching trains going in the same direction. An important aspect in the conducted research is the possibility of using data about the preceding train (speed) to regulate the running parameters of the following train. The use of such a solution leads to savings of mechanical energy and an increase in the smooth running of a train.
On the basis of the simulation, attempts were made to answer the question of what could be possible energy benefits from the speed equalization process between trains, as well as what problems may arise in this process.
Green rail is one of the slogans [
1] which is currently guiding the research work carried out by the scientific teams of the railway industry, as well as the legislative work related to the new edition of the technical specification for interoperability relating to control-command and signaling [
2]. One of the topics in the ecology of the railway system is energy efficiency in the movement of individual trains [
3], and in the article [
4] about Evaluation of Energy Efficiency Technologies for Rolling Stock and Train Operation of Railways (EVENT), the project contains information in the field of Energy Efficiency Technologies for Railways which is being collated, and present and future technologies are being evaluated for railway purposes.
One of the topics in the ecology of the railway system is energy efficiency in the movement of individual trains, which was presented in the publication [
3]. On the other hand, the article [
4] presents a project (EVENT), which includes the assessment of energy efficiency technology for rolling stock and rail train operation from the perspective of future railway needs.
The development of railway traffic control systems and area radio transmission systems (radio communication) [
5], as far as data transmission between trains is concerned, opens new perspectives for solutions which have not been applied so far due to difficulties in technical implementation.
A great opportunity for this is seen in the work on new algorithms for automatic train control (ATC) [
6] aimed at reducing energy consumption during runs. In the publication [
7], the authors presented the optimization process results of switching points that initiate cruising and coasting phases of the driving. Due to nonlinear optimization formulation of the problem, nature-inspired evolutionary search methods, Genetic Simulated Annealing, Firefly, and Big Bang-Big Crunch algorithms were employed in this study. In [
8], the authors presented a proposal for a mathematical model of Movement Authority in the ERTMS/ETCS system, which is an essential characteristic of the route for a train, and paper [
9] presents proposals for the development of the ERTMS/ETCS system.
The benefits of improving the running of the train are achieved, among other things, as a result of selecting the appropriate parameters for determining the train braking curve in the ETCS system presented in [
10] and on the basis of the proposed model based on Neural Networks for repetitive, defined phases and conditions of train running [
11].
The idea of increasing smooth running is based on driving the train in a way that minimizes the need for speed changes (acceleration and braking). The risk of a train approaching the preceding train at a dangerous distance is one of the reasons for the need to brake or stop. On the other hand, one way to minimize this risk is to try to achieve a similar speed of both trains in order to maintain a constant distance between the trains, which can be assisted by exchanging information about the current operational speed.
A similar issue of movement was presented in the article [
12]. This work presents an “operational” approach to the so-called coupling trains into convoys. The operational state, striving to couple trains, is a traffic situation analogous to the one analyzed in this article.
The proposed method implies train control using the ETCS L2 system, the functionality of which is complemented by additional functions. This additional function is the transmission of information to the following train about the movement parameters of the preceding train. The current specifications [
13] do not foresee this possibility, but RBC has this data, and it is technically possible to transmit it, e.g., by means of packet number 44, which can be used for additional functions. When operating with ETCS L2, the following train brakes when approaching a preceding train at a dangerous distance. In the proposed method the information about running parameters of a preceding train is used in different variants, and braking is initiated earlier to reduce the energy consumption when a following train approaches a preceding one. These are original considerations of the authors, not carried out by other researchers in a similar operational scenario.
The issue of trains running on the track one by one and maintaining a minimum distance between them has been the subject of many considerations. In works [
12], the concept was presented of a Vehicle-to-Vehicle (V2V), where communication architecture trains can move in a virtually coupled platoon which can be treated as a single convoy at junctions to improve capacity. Furthermore, paper [
14] introduced Virtual Coupling in the context of a system ERTMS/ETCS; provided some preliminary hints, models, and results; and drew conclusions about the required safety analyses and future developments. The paper [
15] described the Virtual Coupling paradigm with a focus on standard European railway traffic controllers. The authors presented ways to operate trains in virtually connected convoys and the benefits from doing so. The train driving techniques proposed in the following paragraphs allow such a configuration to be achieved in a smooth manner.
The scale of costs incurred by railway undertakings as a result of disturbance occurring on the railway network, including the need for frequent braking and acceleration of trains in places with speed limits, is presented in article [
16].
The authors presented calculations for an unscheduled stop and start of a 490 T passenger train with the EU07 locomotive. Such a traffic scenario resulted in an increase in energy consumption by 75.6 kWh, while for a freight train with the weight of 1900 T with a ET22 locomotive, it resulted in an increase in energy consumption by 191.4 kWh.
In the paper of the same authors [
17] based on the results of simulation runs on the E59 line, for a fast train Poznań Gł.–Wrocław Gł., about a 40% increase of energy for traction purposes as a result of disturbances in traffic of the examined train was observed.
The study [
4] presents, among others, ways to achieve energy savings in transport.
One of the solutions is the use of the Driving Advisory System (DAS), which allows the driver to be assisted in selecting the best possible speed profile, from the perspective of traction energy savings, when approaching points of traffic conflict, such as potential places generating primary and secondary disturbances.
As reported in the study, assuming no energy recovery, DAS achieved energy savings of more than 14% for a typical train timetable on the railway line and more than 26% energy saving for an ideal uninterrupted train timetable. When 90% of the energy was recovered through regenerative braking, the energy savings exceeded 8% and 15%.
The study also indicated that as a result of the reduction in the number of passing red signals (extending the travel time allowed for the arrival at the signal when the signal was changed to MA (Movement Authority)), safety was increased by about 11% in typical morning traffic as per the timetable and by more than 22% in the case of an ideal, uninterrupted timetable.
The publication [
18] presents the results of tests on runs conducted on the SBB rail network (in Switzerland). Theses were formulated on the factors affecting traction energy consumption, and the degree of possible saving from 10% to 30% was estimated. A reduction in traction energy consumption was achieved by using an appropriate train speed profile adapted to the operating conditions, including speed restrictions due to primary and secondary disturbances. One way to optimize the train movement was to extend the train’s running time before the mobile speed limit location. Such an analysis is also presented in the article [
19], where the efficiency of mechanical energy in various motion aspects was considered.
In paper [
20], the authors deal with the optimization of the driving technique in order to effectively use the track sections characterized by large drops. Conversely, in [
21], the effects of modelling the driver’s activity which affects the energy consumption of the train have been presented. Global optimization of energy consumption for a full train running scenario has been considered in [
22], and optimization of traction energy consumption using evolutionary algorithms has been presented in [
7]. This research shows how important the research area in question is.
Ways to increase energy savings were presented in the publication [
4], where, inter alia, it presents the possibility of changing the way of running the train as one of the factors allowing the mechanical energy consumption of the train to be reduced. The assessment of energy consumption was made on the basis of the train movement model.
The train motion model has been discussed in detail in the book [
23], where a model of time solutions of differential motion equations (Newton) was created based on parameterized equations of train motion resistance and parameterized traction equations.
Such a model is now widely used in traffic simulation studies, used, inter alia, also in [
12,
24].
In the work, the authors used a similar model of train movement, using the dependencies on the resistance of the train movement on the basis of the article [
25], traction equations based on the work [
26], and the dependencies indicated in the book [
27]. Interpolation of the traction characteristics to the form of a parameterized equation, along with the determination of the error tolerance with the simplification performed, was used from [
19].
3. Searching for the Optimal Solution
3.1. Area of Acceptable Solutions
The traffic situation represents the running of two trains on the same section of line, on the same track, which in the case of higher speed of the following train, may lead to its stopping in case the preceding train fails to leave the next block distance.
Such a situation is very unfavorable from the point of view of energy consumption; therefore, as far as the timetable allows, a smooth process of the following train approaching the preceding one should be achieved, which is a preliminary process for the virtual connection of trains.
To increase the smooth running of approaching, additional information about the traffic parameters is needed. equipped with ERTMS/ETCS L2 can obtain such information from RBC, although it is not standard information according to the current specification. This information can be used to determine the occupancy time of the next block distance and optimize the run profile.
The extension of the information about the speed of the preceding train allows a more precise speed limit and, therefore, a better selection (from the point of view, among others, of the energy consumption) of the traffic parameters for the following train.
In the considered traffic case, a phenomenon appears that the more we extend the travel time of the following train, the lower the probability we have of speed reduction of that train.
On the other hand, extending of train travel time may impact the timetable, which translates into a delay of train arrival to the appointed stations; it may also cause disturbance in the traffic of other planned train routes. In addition, obtaining the smallest possible distance between trains also increases the capacity of the railway line, which is important on lines with heavy train traffic.
Taking the foregoing into account, the travel time of the train is the key issue, and achieving a smooth run of the train and saving energy consumption must not be at the expense of delaying the train from its scheduled time.
Thus, the task of the authors is to indicate a solution allowing the smooth running of the train to be obtained while maintaining the condition of the train running time in compliance with the timetable on a specified section of the railway line. These solutions are in the form of algorithms for shaping run profiles for different variants of the train approach operational scenario.
The optimization task is to find a solution such that the following train loses the least amount of kinetic energy while maintaining a safe distance from the preceding train.
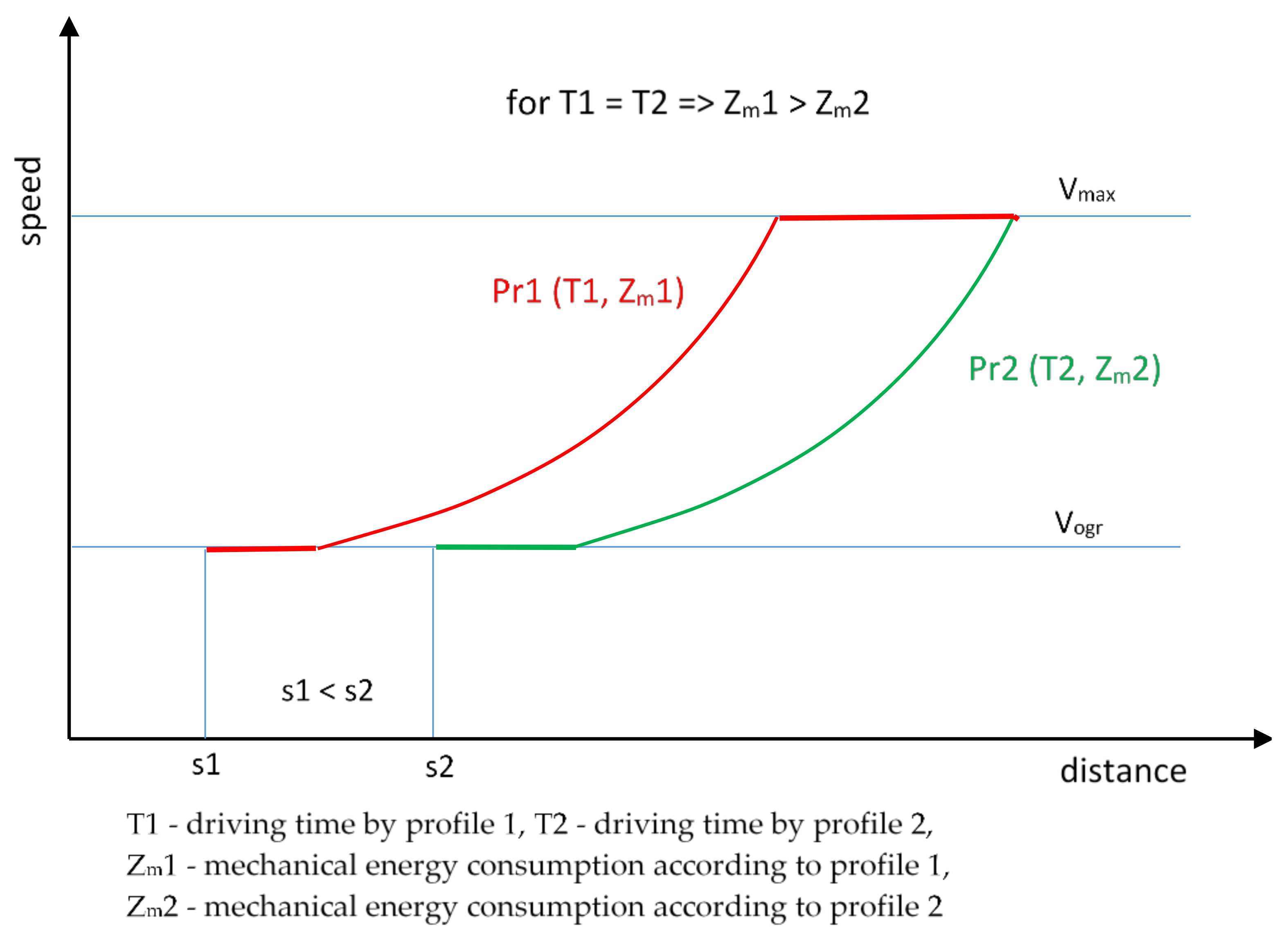
Figure 3 shows the two speed profiles of the following train,
Pr1 and
Pr2, limiting the set of solutions sought, shown in blue.
In the case of the Pr1 speed profile, train moves with Vmax speed until the distance to the Vogr speed limit location (point L marked on the figure) requires the application of the so-called service braking; in the paper, the value uh = 0.5 m/s2 (additional braking delay resulting from the application of the train braking force) has been adopted.
A train running according to the speed profile Pr1 achieves the shortest possible travel time to the point L, but it is characterized by the highest mechanical energy consumption, which results from the length of the section on which the Vmax speed is maintained, resulting in the highest resistance to movement.
In the case of the Pr2 speed profile, train applies service braking by reducing speed from Vmax to Vogr and then runs at a constant speed Vogr up to the point L.
A train running with the Pr2 speed profile achieves the longest travel time to point L, but it requires less mechanical energy due to the length of the section where the Vogr speed is maintained.
In the traffic situation, when train in point L obtains an MA for a further run, the train continues with the Vogr speed (line Pr3). In the case of the lack of MA for a further run, it commences to brake, with its speed decreasing below Vogr (line Pr4), and in extreme cases, it stops completely. Lines Pr3 and Pr4 are continuations of the speed profiles from the set of sought solutions.
3.2. Objective Function and Evaluation Criteria
The objective function is to obtain such a speed profile of the following train that it is located the smallest possible distance from the beginning of the next block distance in a time equal to the value of the time needed for the preceding train to leave the block distance, at a speed approximate to the speed of the preceding train.
These values have to take into account the delay time for processing and transmitting the information and maintaining a safe braking distance in each case.
The objective function can be obtained by shaping the speed profile of the following train (
Figure 4) in such a way that the speed at its end is equal to the speed of the preceding train leaving the block distance (the
OB section in the figure) and that the safe time interval
TOB (from the
to moment to the
tb moment) and distance (from point
O to point
B) is kept between trains.
The following factors will be the evaluation criteria for the preceding train: the amount of mechanical energy used, the location, and the speed of the train at the moment of the lapse of time TOB.
In order to compare the distance travelled and the speed attained in relation to the mechanical energy consumption, the standardization method (calculation of the mechanical energy needed to compensate for the differences) will be used, which is discussed in more detail in
Section 7.2.
An additional evaluation criterion will also be the magnitude of the achieved smooth running of the train (as defined in
Section 4), taking into account that higher train movement fluency results in less wear and tear on rolling stock running parts and wear and tear on the track surface.
The scope of assessment of the following train will be performed between points
A and
O, whose distance
D, representing the distance between trains
PP and
PN at the beginning of the analysis, can take values in the range:
where
TH (train braking time when using the braking force
FH) is the minimum time on the
SH (the braking distance of the train when the braking force
FH is applied) route necessary to stop the train from the maximum speed to zero, and
TPOB =
obi/Vogr is the time in which the
PP train will cover the
OB section at the assumed
Vogr speed on the i-th block distance, while
S1 =
Vmax (
TPOB −
TH) +
SH is the distance that the train will travel in the
TPOB time while moving according to the
Pr1 profile (
Figure 3), and
S2 =
Vogr (
TPOB −
TH) +
SH is the distance that the train will travel according to the
Pr2 profile (
Figure 3).
3.3. Assumptions Used to Assess the Solutions
The assumptions made are intended to create objective conditions for comparing different train running variants (different speed profiles) for the traffic movement before a variable speed limit. This comparison shall be based on train run kinematics, resistance forces due to train speed, and the traffic control system, including the ability to give information to the following train about the position and speed of the preceding train.
The conditions for the assumptions and simplifications allowing for the analysis and comparison for various train running scenarios are the method of determining the traction energy consumption (type of energy, calculation method, etc.), the parameters and type of the train, the function describing the resultant of traction force and resistance forces, the inclination, and the track geometry (curvature) on a given section of the railway line.
The traction force variability results from the technical parameters of both the traction vehicle drive and external conditions, i.e., weather conditions (wheel–rail adhesion, wind force), track profile and geometry (curves), usable power in the traction network (in a given place) from the distance of the train from the traction substation, and the number of trains and their sequence time in the supply area of the train in question.
The experience of the driver is also important, as is their method of controlling the drive in terms of adjusting the train speed to technical and operational conditions.
All the above-mentioned conditions and limitations affect the non-linearity of the traction characteristics of a traction vehicle: traction force as a function of train speed.
The method of calculating energy consumption, mechanical energy, adopted for the analysis, relates directly to the speed and traction force of the vehicle, as well as the resistance to train motion depending on the train speed. The adopted assumption makes it possible to ignore the efficiency and type of energy used in the drive (electric or thermal), i.e., the efficiency of energy conversion in a traction vehicle, energy consumption for non-traction needs in the train, etc.
Since the consumption of mechanical energy is the product of the traction force (depending on the speed at a given moment) and the speed, and the change in speed depends on the traction force and resistance to motion, the determination of energy consumption is a complex process. Its determination is possible through the use of approximations and averages in short time intervals. For a specified train running time (acceleration):
where
V1 <
V2 and Δ
V =
V2 −
V1; we use time intervals that allow, approximately to the actual values, the average value of traction force and resistance to motion to be obtained, as well as the average speed of movement. The more time intervals, the shorter the time interval and the shorter the distance and the smaller the deviation of the mean value from the actual values.
The consumption of mechanical energy is the expenditure of traction energy to overcome the resistance to motion and to change the kinetic energy of the train in the case of increasing the running speed:
where
Z is the mechanical energy consumption,
Fi is the mean value of the traction force in the time interval ∆
Ti,
Vi is the average speed in the time interval ∆
Ti,
n is the number of time intervals, and
mf is the mass, taking into account the energy of rotating masses (wheels, gears, etc.).
In order to obtain better readability and unambiguity of the variant differences, the following aspects were omitted from the model, i.e., the influence on traction power of the power supply system (voltage and power), efficiency of the power supply and energy processing system, energy losses resulting from resistance in the running parts of the rolling stock, gradient of the line (the profile of the line section with no gradient was established) and track geometry (no curves and turnouts), and the influence of external conditions, such as the influence on the wheel/rail interaction, the so-called slip effect, the way of driving the train by the driver, etc.
For the purpose of results standardization, we used the interpolation of traction characteristics of a particular traction vehicle; detailed information has been presented in publication [
19].
3.4. The Logic of the Research Model
Figure 5 shows the interrelationship of technical aspects to find the optimal solution in the set of admissible solutions.
Ftr: train traction force (depending on the speed),
Fopr: train force acting on the train as a result of resistance to movement (depending on the speed and the location),
Fh: braking force acting on the train as a result of applying the braking system,
uh: additional braking delay resulting from the application of the train braking force,
mf: train weight corrected by the rotating mass factor,
Vogr: speed on the limit,
Vmax: the maximum speed on the distance,
aR: the maximum permissible acceleration of the train,
aH: the maximum train braking delay,
Th: train braking time,
Sh: train braking distance,
Tr: train startup time,
Sr: train startup distance,
TNAO: time of the PN train moving between points A and O,
VNAO: speed of the PN train moving between points A and O, and
D: distance between PP and PN at the tNA and tPO moment.
6. Operational Scenario
6.1. General Assumptions
Operational scenarios are a recognized tool for testing the functionality of the ETCS system in different train operations. An example of the application of operational scenarios are the high speed rail in Spain [
32] and on Italian Railways [
33]; numerous research works are also carried out in laboratory conditions, which were presented in the publication [
34].
The operation of the following train is determined by the movement of the preceding train, and therefore, the operational scenarios will be determined by the traffic situation resulting from the three contexts of the preceding train movement (
Figure 6):
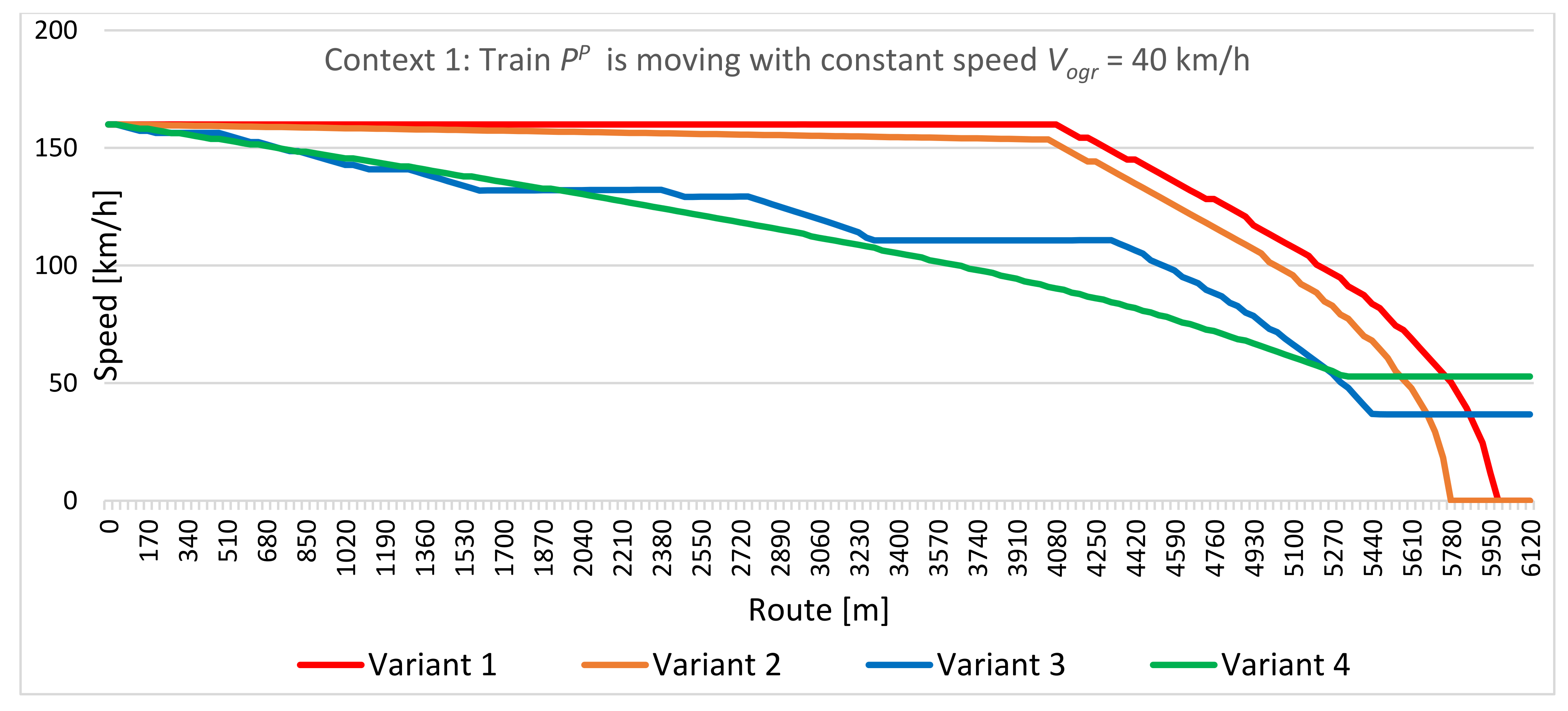
Context 1: The PP train at the start of the simulation is running at the reduced speed of Vogr = 40 km/h and is moving with such a reduced speed on the whole OB section.
Context 2: The PP train at the start of the simulation is running with the reduced speed Vogr = 40 km/h and then receives information about the release of subsequent block distances, which allows an increase in speed. The change of speed shall be at the maximum allowable acceleration at block distance ob4.
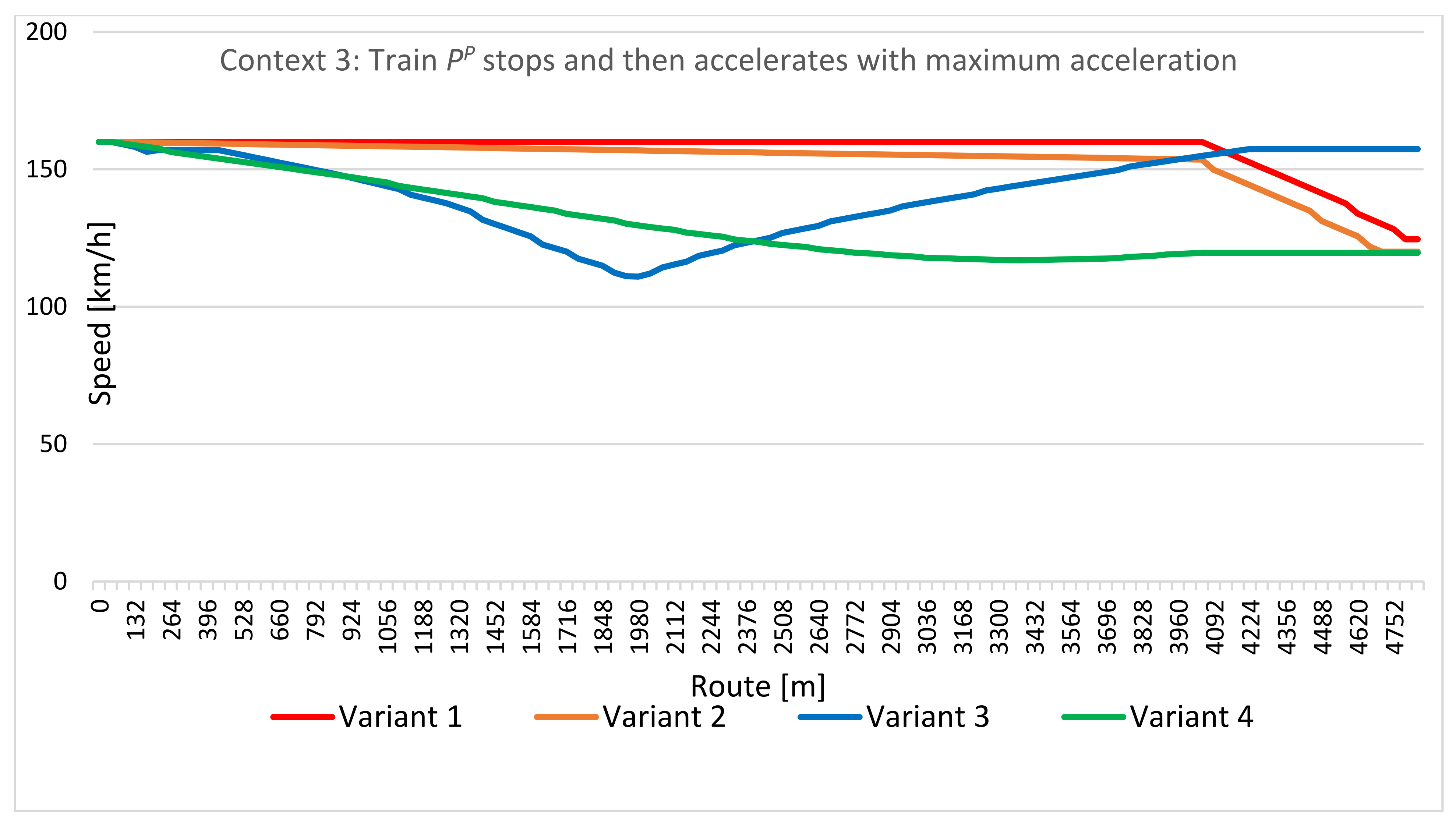
Context 3: Train PP at the start of the simulation is running with the reduced speed Vogr = 40 km/h and then, due to lack of information on the release of subsequent block distances (ob5 occupied), starts braking. After stopping, it receives information about the release of subsequent block distances, which makes it possible to increase speed. The change of speed shall be at the maximum allowable acceleration at block distance ob4.
It takes 10 s for the driver to stop, which results from the driver’s reaction, brake dragging, and switching the PP systems into the start-up mode.
In the case of the following train, the study assumed four variants of the train speed profile (movement) on the AO section. These variants differ in the following assumptions:
Variant I: (reference variant) the PN train is moving based on indications from ERMS/ETCS L2, and based on the information about approaching the EOA (End Of Authority) (at distance of 2000 m), it starts service braking.
Variant II: (reference variant) train PN is moving based on ERMS\ETCS L2 indications and additionally receives information about the occupancy of subsequent block distances within distance of 6000 m from the place at which it is currently located. The driver switches off the propulsion, and the train is moving in the so-called startup mode until it approaches the EOA and within 2000 m, commences service braking.
Variant III: the PN train is moving based on ERMS\ETCS L2 indications, and in addition, it receives the information on the location and speed of train PP. This information is updated every 10 s (suggested value for the ETCS variable: T_CYCLOC).
Based on an algorithm for optimizing the train speed profile, the drivers are given data at what speed (using the propulsion system to overcome the resistance to motion) or braking force they should apply to continue to run to the location of the EOA place.
Variant IV: train PN is moving based on ERMS\ETCS L2 indications, and in addition, it receives information on the location and speed of train PP. This information is updated every 10 s (suggested value for the ETCS variable: T_CYCLOC).
Based on an algorithm for optimizing the train speed profile, the driver is given data about whether to continue running in the so-called startup mode or to apply (and at what force) the braking of the train in order to reduce the speed until the EOA place.
The first two variants assume that the traffic management technique is in accordance with current practice and does not use additional information about the movement parameters of the PP preceding train. Two others assume that such information is sent to PN together with zj and will be used in the run-shaping profile algorithm.
All variants of the operational scenario assume a similar initial situation. The preceding train is running at a constant speed of VPO = 40 km/h (speed of the PP train at point O). The following train is running at a speed of VNA = 160 km/h (speed of the PN train at point A). Train PP is at the location just before deceleration ob3 (3-th block distance).
6.2. Variant 1 (Red)—Run at Maximum Speed without Consideration of sP and VP
Variant 1 assumes the initial conditions as described in
Section 4.1. It is also assumed that
PN has no information on
VP and
sP (speed of the
PP train at point
s). It only has the MA and is moving with a maximum speed of
Vmax = 160 km/h.
At the moment of tz11, event z11 occurs when PP leaves ob3, and zjPN (MA for the following train) extends to pob4. At the tz12 moment, the event z12 occurs, consisting of PN reaching the last safe location where it commences service braking to pob4. Until the tz13 moment (ob4 release event by PP) and when reaching the safe distance to pob4, the PN train continues braking, until it stops.
At the tz13 moment, event z13 occurs, consisting of extending zjPN to pob5, and PN passes from the braking phase to the acceleration phase.
The course of the operational scenario (
tz1–z3) can be divided into the following stages:
where:
Tz11–z12: train running time at the maximum speed (Tzi-zj: travel time between events i and j),
Tz12–z13: train running time at the braking phase,
so:
where
TVmax is the time of running at maximum speed;
Th and
Sh shall be determined on the basis of dependencies (18 and 19) described in
Section 5.5.
We are analyzing the mechanical energy consumption of PN for variant 1 between events z11 and z13 (Tz11–z13):
Zz11–z12: consumption related to sustaining speed Vmax, and
Zz12–z13: no mechanical energy consumption,
resulting in
where:
Ftr max is the traction force to maintain the maximum speed.
6.3. Variant 2 (Orange): Idle Running without Consideration of VP
Variant 2 assumes the initial conditions as described in
Section 4.1.
It is also assumed that PN has information about SP (information about the occupancy of the ob4 section), has the MA, and reduces its speed from the maximum value of Vmax = 160 km/h as a result of switching off the propulsion and running at the so-called idle movement (deceleration mode as a result of traffic resistance forces).
At the tz21 moment, event z21 occurs when PP leaves ob3, and zjPN extends to pob4. PN is running at the so-called idle movement mode until tz22, when the event z22 occurs, consisting of PN reaching the last safe location, where it commences service braking to pob4.
Until the tz23 moment (when PP slows down on section ob4), train PN continues braking, and it does so in the case of reaching the safe distance to pob4, until it stops.
At the tz23 moment, event z23 occurs, consisting of extending zjPN to pob5, and PN passes from the braking phase to the acceleration one.
The course of the operational scenario (
tz1–z3) can be divided into the following stages:
where
Tz21–z22: train running time at the so-called idle movement mode and
Tz22–z23: train running time at the braking phase,
so:
where
Tw,
Sw is the time and distance of operation at the so-called inert movement (speed decreases due to resistance forces);
Th,
Sh are determined on the basis of dependencies (18 and 19) described in
Section 5.5, taking into account that for
Tw,
Sw force
Fh is equal to zero, and the force acting on the train is calculated according to the dependence:
We are analyzing the mechanical energy consumption PN for variant 2 between events z21 and z23 (tz21–z23):
Zz21–z22 and Zz22–z23 indicate no mechanical energy consumption,
6.4. Variant 3 (Blue): Run at Variable Speed, with Consideration of sP and VP
Variant 3 assumes the initial conditions as described in
Section 4.1.
It is also assumed that PN has information about sP and VP, has the MA, and reduces its speed from maximum value of Vmax = 160 km/h to Vogr = 40 km/h by controlled braking of the train and running over part of the route at a set speed of Vx.
At the tz31 moment, event z31 occurs when PP leaves ob3, zjPN extends to pob4, and PN receives information about the PP train, i.e., location sP and speed VPO (information update every 10 s), and the length of distance ob5.
On the basis of the provided information, distance
D between trains is calculated, and the estimated train running time
PP to point
B (the predicted moment of leaving distance
ob5) is calculated according to the dependence:
For the variant with speed control, it is assumed that PN should arrive at distance D* = D − SH, where SH is the braking distance of train PN.
The following dependencies will be used to obtain the expected time at a given distance:
where
TNh,
SNh are the braking time and distance, determined according to Formulas (18) and (19), depending, among others, on the value of braking delay
ah;
TNx =
Vx/
Sx is the travel time
PN at a constant speed; and
SNx is the distance travelled by
PN at constant speed
Vx.
Taking into consideration:
We are looking for such braking force,
Fh =
mf uh, that the force acting on a train, consisting of the sum of the movement resistance force and the braking system force,
will allow us to determine the braking time and distance for which the optimum speed
will meet the minimum energy consumption criterion:
At the t31 moment, train PN commences braking, with a delay ah, from maximum speed Vmax to speed Vx. At moment t32, event z32 occurs when the PN train acquires speed Vx and continues to move on for the designated distance Sx, using the propulsion system to balance the resistance forces and maintain the preset speed Vx.
At moment t33, event z33 occurs, where PN has covered the designated distance Sx and is braking, with delay ah, from set speed Vx to speed Vogr limit.
At moment t34, event z34 occurs, consisting of PN reaching the point at which it is correcting the braking force to the last safe location at which it can receive an update of zj to pob4.
When approaching the pob4 within a safe distance, it is stopped.
The course of the operational scenario (
Tz31–z34) can be divided into three stages:
where
Tz31–z32: train running time at the braking phase,
Tz32–z33: train running time at sustained speed Vx, and
Tz33–z34: train running time at the braking phase,
so:
where
Th and
Sh are determined on the basis of the dependence described in
Section 5.5. (18 and 19), while
Tx is determined by Equation (34):
We are analyzing the mechanical energy consumption of PN for variant 3 between events z31 and z33 (Tz31–z33):
Zz31–z32 and Zz33–z34 indicate no mechanical energy consumption, and
Zz32–z33 indicates the energy consumption for balancing the resistance to movement and maintaining speed VNx,
6.5. Variant 4 (Green): Run with Braking Control Including sP and VP
Variant 4 assumes the initial conditions, as described in
Section 4.1.
It is also assumed that PN has information about sP and VP, it has the MA, and it reduces its speed from the maximum value of Vmax = 160 km/h to Vogr = 40 km/h as a result of switching off the propulsion and controlled braking of the train.
At moment tz41, event z41 occurs when PP leaves ob3, zjPN extends to pob4, and PN receives information about train PP, i.e., about location sP and speed VPO (information is updated every 10 s).
Based on the provided information, the distance D between trains is calculated, and the speed of train PP is compared to the speed of PN.
The braking delay is determined from the following dependence described in
Section 2.1. (Formula (3)):
where
D* =
D −
SH,
SH is the braking distance calculated for train
PN from speed
Vogr to
V = 0.
In the case when
VNt ≤
VPt (speed of the
PN and
PP train at “
t” moment), train
PN uses propulsion to increase speed, with its acceleration determined by dependence:
The PN train is moving according to the aforementioned dependencies until the tz42 moment, when the z42 event occurs, consisting of PN reaching the last safe location at which service braking is invoked to the last safe location at which the train must obtain an extension for the MA without the need to brake before the EOA.
Until the tz43 moment (when PP is leaving ob4), train PN continues braking.
At moment tz43, event z43 occurs, consisting of extending zjPN to pob5, and PN passes from the braking phase to the acceleration phase.
The course of the operational scenario (
tz41–z43) can be divided into the following stages:
where:
Tz41–z42 is the train running time with controlled delay or acceleration, and
Tz42–z23 is the train running time at the braking phase,
so:
where
Th,
Tr,
Sh, and
Sr are determined on the basis of dependencies (13, 14, 18, 19) described in
Section 6.5. and calculated on the basis of delay or acceleration, following (42) and (43).
We are analyzing the mechanical energy consumption of PN for variant 4 between events z41 and z43 (Tz41–z43):
Zz41–z42 represents the mechanical energy consumption in the case of VNt ≤ VPt, when increasing the speed of a train with acceleration ar,
Zz41–z42 represents no mechanical energy consumption in the case of VNt > VPt, when reducing the speed with delay ah, and
Zz42–z43 represents no mechanical energy consumption.
The mechanical energy consumption is the sum of the energy consumed to overcome the resistance to movement (determined for the average speed of
FVśr =
mf ar and the distance within the range of Δ
Si) and the change of kinetic energy of the train from speed
V1 to speed
V2, according to the dependence:
where
n1 =
T1/∆
t is number of time intervals for which
Vśri and Δ
Si have been determined at the
i section.
7. Studies
7.1. Assumptions for the Studies
The study was carried out from moment t = tPO = 0 until t = tPB, when the preceding train leaves block distance OB and the following train obtains the MA for section OB.
At moment t = tPB, different variants of the following train movement were obtained, the differences of which were mainly due to the length of the distance covered (measured from point A) and the changes of speed on a given run route.
The braking routes, according to
Ie-4 [
35] are presented in
Table 1.
7.2. Standardization of Results
A comparison of the variants in terms of mechanical energy consumption alone is not conclusive. It should be noted that a train which has had a shorter route or is moving at a lower speed will have to use additional energy to compensate for those values in order to maintain the scheduled time of the train at the next section of the route.
Therefore, for the purpose of comparing the variants, we applied the so-called standardization of the volumes, in this case consisting in calculating the amount of mechanical energy consumption for the purpose of compensating for the differences obtained.
As shown in
Figure 7, for each variant, we calculated the required mechanical energy consumption for reaching point
B by train
PN, using the maximum allowable acceleration. In the case of differences in speed, we additionally calculated the mechanical energy needed to increase the speed to the highest value obtained in one of the variants (in
Figure 7, variant 4: green).
The mechanical energy consumption for each variant amounts to
where
FNsB is a traction force required to balance the resistance to movement over section
SNsB from point s to point
B for the
N-th variant;
VNmax is the highest speed obtained in the
N variant at point
B.
The final comparison of variants was to compare the sum of the mechanical energy consumption of the PN trains on route SABN plus the mechanical energy needed to compensate for speed differences.
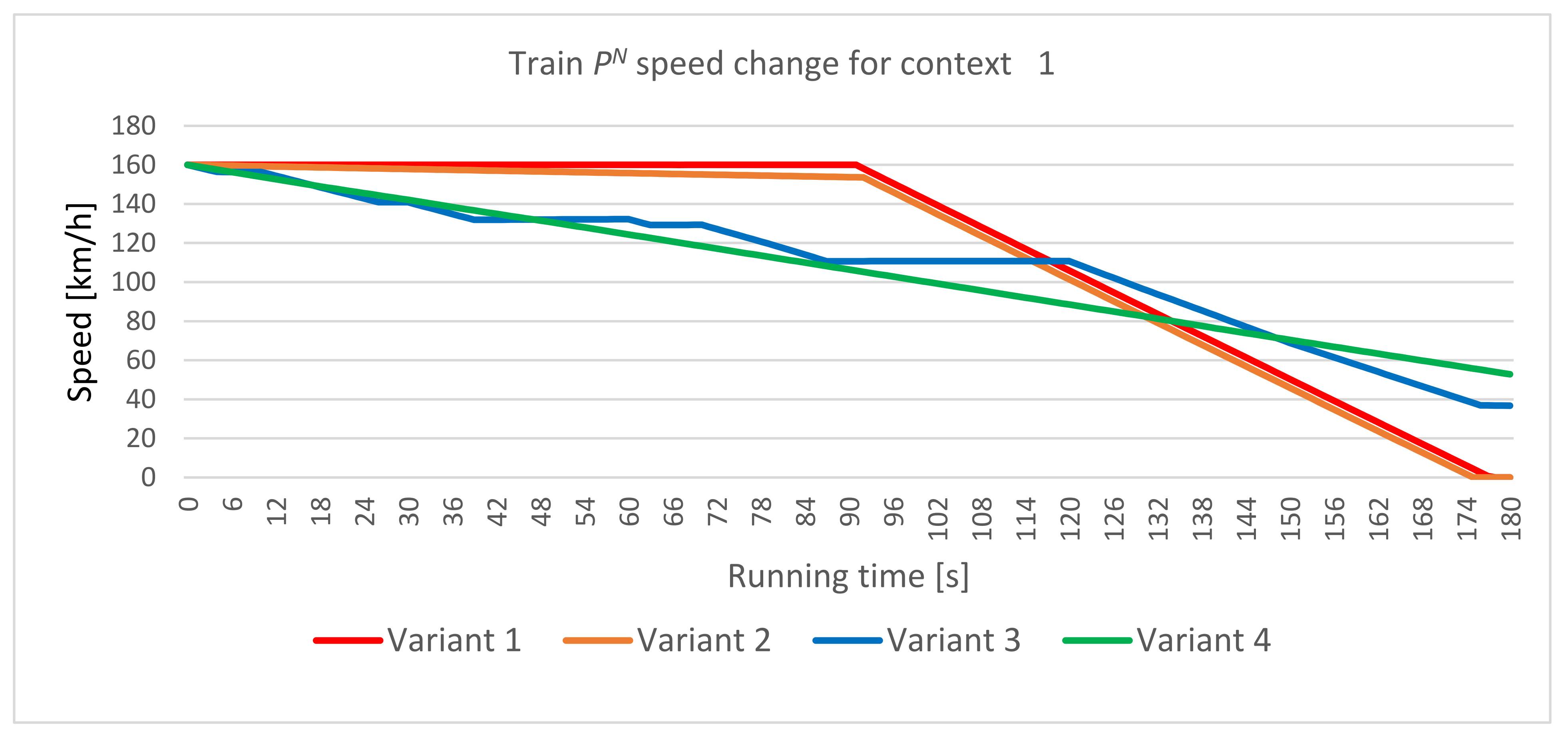
7.3. Simulation Results for Context 1
In variants 1 and 2, it was necessary to stop the train, even though the preceding train was moving at a constant speed without stopping.
Variant 4 was the most profitable one in terms of energy consumption, which also allowed the train to operate most smoothly.
The results for all variants for context 1 are shown in the
Table 2 while the standarization of results is presented in the
Table 3.
A graphical representation of the results for all variants for context 1 is shown in
Figure 8 and
Figure 9.
7.4. Simulation Results for Context 2
Variants 1 and 2 were the most favorable ones from the point of view of energy consumption and smooth running of the train. This is because there was no need to reduce the speed of the trains, as the preceding train leaves ob4 before the trains approach the last location where they need to start braking before the EOA.
Information transmitted every 10 s in variants 3 and 4 had, in this case, an adverse effect on the course of the following trains: they adjusted their speed to the preceding train, which, taking into consideration the 10 s delay, caused unnecessary reduction of the speed of the following train.
The effect of the volume of the distance between trains at time t = 0 is worth noting. When the distance was shortened from D = 6000 m to D = 4600 m, the speed profiles for the individual variants of Context 2 changed, and they resembled the variant profiles for Context 1. This means that variants 1 and 2 were no longer the most favorable with respect to variants 3 and 4, due to the fact that train PN in variants 1 and 2 approached the last point too quickly, at which it needed to brake before the EOA.
The above case shows that it is necessary to consider how to interpret and create a speed profile for the PN train to consider the trend of the change of the speed of the preceding train and the expected distance between trains.
The results for all variants for context 2 are shown in the
Table 4 while the standarization of results is presented in the
Table 5.
A graphical representation of the results for all variants for context 2 is shown in
Figure 10 and
Figure 11.
7.5. Simulation Results for Context 3
From the energy consumption point of view, variant 2 was the most beneficial, while from the point of view of smooth running of the train, variant 4 was the most beneficial.
It is worth noting that the profile according to variant 3 is close to the speed profile of the preceding train (there was a time and distance interval as a result of attaining the similar speed of both trains), which can be important when applying the so-called mobile block distance.
The results for all variants for context 3 are shown in the
Table 6 while the standarization of results is presented in the
Table 7.
A graphical representation of the results for all variants for context 2 is shown in
Figure 12 and
Figure 13.
8. Discussion and Conclusions
This paper presented the results of a study on the energy efficiency and smooth running of a train on the route while approaching another train. Such a situation occurs when trains follow each other on the same track in the same direction, which is a starting point for creating train traffic management with prospective use of the so-called virtual distance between trains. This paper presented the models necessary for carrying out the study and characterizes the experimental field that was used for the study. We analyzed four variants of the train driving technique, proposing two solutions, taking advantage of the fact that the following train receives the values of operation parameters of the preceding train.
We carried out studies with respect to all variants for three different contexts of the movement of the preceding train.
On the basis of the indicated literature (chapter 1), it was expected that benefits would be obtained in shortening the distance between trains as a result of connecting trains in the so-called convoys (virtual distance), as well as thanks to the development of the ERTMS/ETCS system.
The authors of the work focused on a selected characteristic case of a traffic situation: trains approaching each other at a distance of the influence of the position of the preceding train on the following train, and as a result of the analysis of various variants and contexts of the situation, they assessed the possibility of obtaining the above-mentioned benefits.
The tests allowed this study to obtain positive results for checking the influence of information from the preceding train (train speed) on energy saving and running smoothness of the following train, as a result of adjusting the speed of the following train to the speed of the preceding train.
The obtained case of the most profitable train driving, according to variant 4 for context 1, confirms the possibility of obtaining the optimal solution in the defined area of acceptable solutions.
It should be noted that not every variant and operational context allows for obtaining the expected results, e.g., context 2 showed that variants 1 and 2 (without adjusting the speed of the train following the preceding train) remained the most advantageous.
In order to assess the impact of changes in the parameters of the railway line (increasing the resistance forces) on the results, simulations were made for the line section inclination from −0.7‰ up to +6.0‰.
The simulation showed that for the increase in resistance to motion,
for context 1, variant 3 and 4 remained the most favorable, reducing the difference between variant 3 and 4;
for context 2, the results of all variants become equal, and variant 1 and 2 remained the most favorable; and
for context 3, variant 1 and 2 deteriorated with respect to variant 3 and 4, and variant 4 deteriorated the least.
As it can be seen from the simulation, the benefits are strongly influenced by the context of the preceding train movement and the distance between trains. The frequency of transmission of information about traffic parameters, PP, i.e., train location and speed, to train PN is also important.
A large spectrum of possibilities for creating a speed profile on the basis of data of the preceding train (location and speed) provides good reasons for further analyses of this issue.
The applied variety of studies has showed that the exchange of information between trains about the operation parameters can significantly improve the energy efficiency and smooth running of the train. At the same time, there are situations where having the information slightly reduces efficiency, and this occurs when there is significant variability in the operational parameters of the preceding train. These observations will be the input to enhance the proposed techniques in further stages of the research.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}