1. Introduction
Today, nano and micro-grids play a strategic role in the development of the electricity system [
1,
2]. They represent, most of the time, autonomous energy communities [
3], able to guarantee regulated energy exchanges, reducing the stress on the public distribution network. In these networks, it is possible to integrate different energy sources and at the same time new and programmable loads could be introduced. It becomes crucial to correctly plan energy flows in this context to optimize efficiency [
4,
5,
6,
7]. micro-grid architectures have different configurations, but in most cases the high use of renewable sources, such as solar, make these networks, on the one hand to behave with low inertia and on the other hand to count on generation resources, whose actual production is not easily predictable compared to the needs of the loads. It is, therefore, essential to have energy storage systems capable of promoting an optimal use of the resources. One of the most interesting and challenging solutions is to use Electric Vehicles (EV) as virtual storage systems [
8,
9,
10,
11]. Different optimization-based solutions to manage the charging profile of electric vehicles were proposed [
12]. Most of the works assume that the electric vehicles are autonomous and an important effort is made in forecasting the arrival time of each EV and other uncertain variables, such as the arrival State of Charge (
SoC) [
13,
14], or in developing robust scheduling techniques that can guarantee an adequate power flow to/from the public grid, in front of any feasible realization of arrival time and
SoC [
15].
The existing solutions to manage the optimal charging of EV fleets have two main limitations. First, most of them need to track the dynamics of each vehicle in the fleet to accurately estimate its arrival time and
SoC. This approach poses a strong limitation on the scalability of the solution, as the complexity of the estimation and optimization problems grows linearly with the size of the fleet. In [
12], a different approach is presented, where the main element of the model is the charging station and the arrival of EVs are handled as events that modify the state of the station. This configuration, limits the size of the problems to the number of stations handled by the management system. On the other hand, in the literature, the degrees of freedom that are considered to manipulate the charging profile of EVs are the power level and the charging interval, given some constraints on the total recharging time. However, none of the existing models takes into account the cost incurred by the fleet manager with a longer charging time. In the specific case of a car-sharing fleet, the operator of the sharing service actually suffers a loss when a EV is unavailable during the recharge event. The longer the charging time, the higher the loss.
In this paper, we present a method for planning a micro-grid operation in which renewable sources, electrical loads and a car-sharing fleet of EVs are present. The vehicles energy requests are extracted from a real use case of a car-sharing fleet. The proposed solution takes into account the operational policy of the car-sharing company to gain information about the structure of the problem, impose costs and constraints on the operation, and reduce uncertainty in the energy demand. An optimal control problem is formulated, considering that all the EVs are taken to recharge mode at the same state of charge level. Flexibility is added to the recharging process augmenting the interval available to achieve the target SoC status, at the cost of reducing the time available for the car-sharing service. A multi-objective cost function allows performing a trade-off between flexibility in the demand curve and effectiveness of the sharing service. The validity of the formulation is verified in different scenarios of load and renewable generation.
In
Section 2, we present the problem setup including the description of the employed data bases of EV charging events, loads and local photo-voltaic generation.
Section 3 describes the operation of the car-sharing service and the resulting constraints and costs for the micro-grid operation.
Section 4 describes the proposed energy management system, the considered multi-objective optimization problem and constraints.
Section 5 illustrates the characteristics of the solution through a numerical example. Finally,
Section 6 gives some conclusions and future developments.
2. Problem Setup
The considered micro-grid is formed by an industrial and commercial site, constituted by two circuits, a photo-voltaic (PV) generation plant and a set of charging stations that serve a fleet of shared electric vehicles.The grid is modeled as a single bus with limited capacity to exchange power with the main grid as shown in
Figure 1.
The data used to model the behaviour of the EV fleet are those collected in the city of Milan in Italy during the Teinvein project [
16]. This project monitored a fleet of electric vehicles used for car-sharing. The available data set contains recharging events performed in the around 200 public charging stations placed in the urban area.
By analyzing the behavior of the charging stations, it is possible to derive usage profiles that take into account the amount of energy withdrawn and the initial state of charge of the vehicles [
17]. Using a fleet of vehicles, as opposed to individual owners data, allows for realistic estimations of virtual battery behavior. The fleet manager can plan how many cars to allocate to virtual storage and how many to make available to users. In addition, the fleet manager can define charging strategies. For example, in the considered case study, recharging occurs when the state of charge of the vehicles is around
.
The arrival of the vehicles is asynchronous and can happen at very different moments. Moreover, each car can leave the location only when it has reached a predefined target
SoC named
. Thus, the scheduling problem we set has to deal with challenging constraints to satisfy. Starting from the methodology proposed in [
17] it is possible to obtain the occupation curves of the charging stations, such as for example those shown in
Figure 2, where daily profiles of charging station occupation is shown for a set of 10 consecutive days. Each color represents a different day. It can be noticed that for this station the maximum occupation is 4 simultaneous EVs connected for recharging, and that several days present intervals without any EV connected to the station, thus limiting the flexibility of the micro-grid.
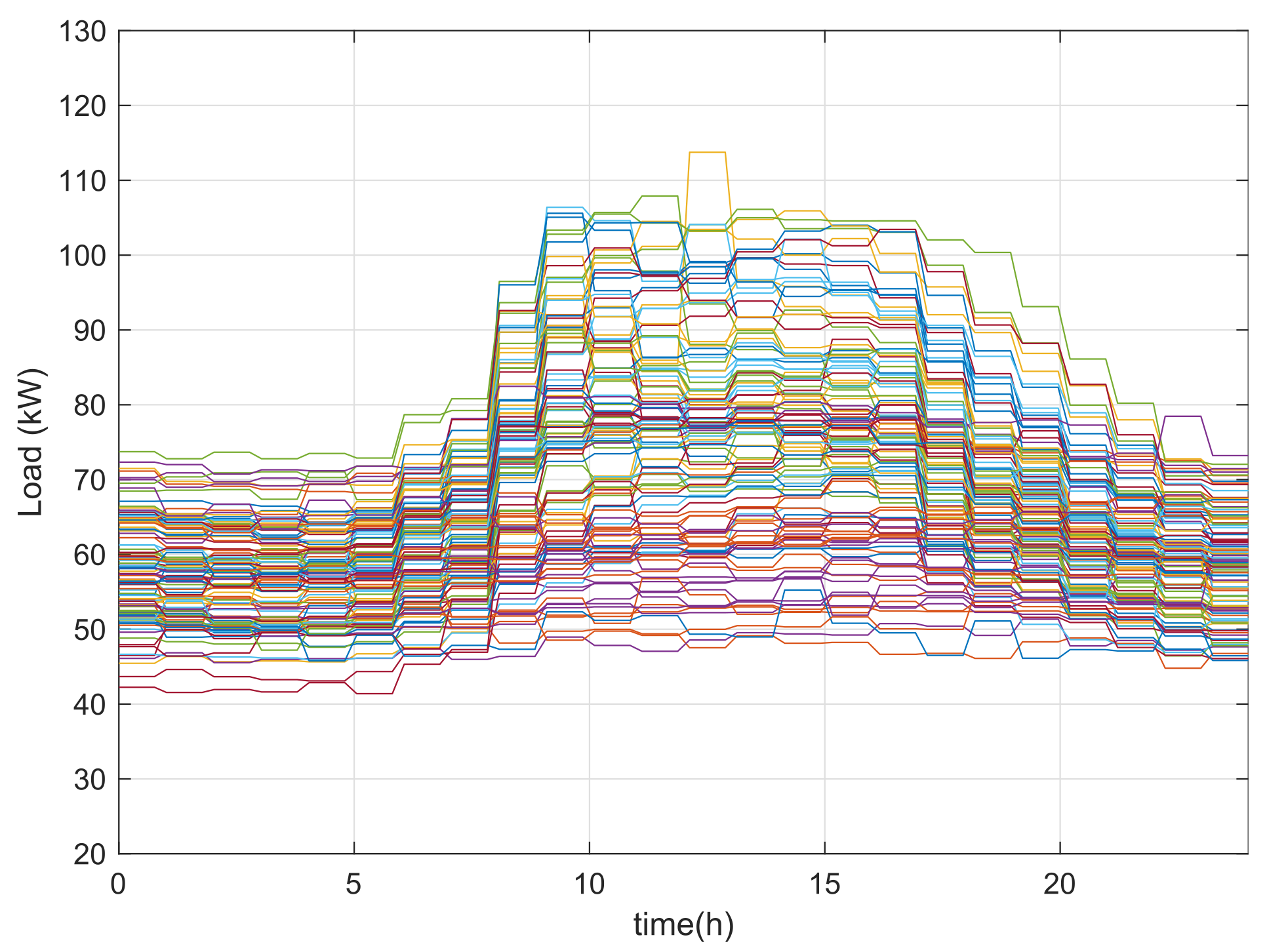
As far as the modelling of loads and photo-voltaic sources is concerned, we rely on those presented in [
18]. In that paper a multi-year database containing data from a real micro-grid is presented. The loads of the two circuits are assumed partially flexible and their typical behaviour is shown in
Figure 3, where the daily profile of the load is illustrated for one year. Each color represents a different day. It can be noticed that the peak load occurs between the hours 10 and 18, also that the daily baseline can vary from 40 kW up to 70 kW.
Similarly, photo-voltaic generation profiles are extracted form the data-base presented in [
18]. In
Figure 4, the daily generation profiles are reported for one year. Each color represents a different day. Please note that the daily peak production can rise up to 83 kW.
Table 1 shows the main parameters of the considered micro-grid.
Finally, the cost of the energy acquired from the public grid, considered in the case study, is a standard time-of-use rate with three different price ranges:
Management System
The energy management systems is the gateway between the controllers of the main elements of the micro-grid and the public grid. It uses the forecasts on the arrival time of vehicles, and the trend of loads and renewable sources to make optimal decisions about flexible loads activation and EV charging profiles. The architecture is shown in
Figure 5. Here, the lines represent information flows and the arrows their direction. That means that the EMS obtains information from the forecasts providers about generation, EV charging events, load profiles and energy tariffs, but without affecting their decisions. On the other hand, the EMS interacts with flexible loads and charging stations in a two-way communication. In one direction it obtains information about the real-time status of the consumption, charging station status, connected EVs, etc., and, on the other, it commands how to activate flexible loads and how to modify the charging profile of each EV connected to the station.
The management system works to make sure that the power balance of the micro-grid is satisfied at each instant, while optimizing a set of Key Performance Indicators.
The power balance of the system is:
where
is the power absorbed to the main grid,
is the power generated by the photo-voltaic plant,
is the power consumed by each circuit load, and
is the power consumed by each charging station.
Please note that if the loads are inflexible and the charging stations operate without any management system, recharging each EV at maximum power from its arrival until achieving the target SoC condition, the power balance can only be guaranteed by modifying the power absorbed to the main grid.
The aim of the energy management system is to offer a feasible power flow while maintaining each component within its technical limits, exploit the flexibility of the EVs charging process and of the loads, to optimize the operational cost of the grid and minimizing the power exchanges with the main grid.
To provide some flexibility to the micro-grid, in the literature it was proposed to install local energy resources, such as traditional generators and/or static storage systems. However, if none of these resources are available, adding a management system to the charging stations can allow the micro-grid to achieve the proposed objectives at the expense of increasing the charging time of the electric vehicles.
3. EV Fleet Recharging Policy
As shown in [
17], in the present framework we are dealing wit a set of uniform vehicles with the same decision criteria, all the EVs are taken to the charging station when the
SoC achieves a prescribed level and all of them are given the same time window to come back to operation. The aim of this section is to formulate a formal description of the recharging policy, to be employed later in the optimization problem solved by the EMS.
As described at the beginning of
Section 2, the operation policy of the charging station entails the continuous supervision of the
SoC of each vehicle and the decision to recharge the vehicle whenever its state goes below a prescribed level. Let
be a binary variable representing the operation mode of vehicle
i, where
means that vehicle
i is operating in car-sharing mode during the time interval
t and
means that at period
t the vehicle is in recharging mode.
The policy can be summarized as follows:
While an EV is in car sharing service, supervise its
and
When the
of the EV drops below
end the car-sharing operation and bring it to the charging station.
At the beginning of the charging process set the target departure time from the charging station as
where
is the maximum allowed recharging time.
At the charging station, supervise the recharging procedure and bring back the EV to service as soon as the
rises above
:
Introducing
as the state variable representing the state of charge of charging station
i, the previous recharging policy leads to the following dynamics from the point of view of the charging station:
Please note that the previous formulation decouples the usage of each EV and the recharging process.
4. Flexibility-Based Energy Management System
In this section, we describe the proposed a novel EMS that relies on the particular recharging policy of the EV fleet.
The EMS is based on an multi-objective optimization problem with uncertain constraints.
The micro-grid incurs in different costs during normal operation. The main cost is the provision of energy from the main grid. Considering a Time of Use (ToU) tariff the grid energy cost for a given time interval is:
where
is the cost per
of energy bought to the main grid.
At each charging station, there is a cost associated with the time elapsed for the charging process of each vehicle. It is defined as an increasing function of the recharging interval whenever the process takes longer than the minimum feasible charging time, that is,
where
is the shortest interval required to achieve the target
when the charging station applies the maximum acceptable power to the EV.
Figure 6 illustrates the time evolution of the cost
.
For each circuit of the micro-grid, it is assumed that there is a set of referable loads that can provide flexibility to the operation. The activation of these loads has a cost related to the discomfort caused to the users of the services plus the operational cost of the demand management systems. The capacity of the flexibility service is limited to
of the forecast power at each interval, while the daily consumption must keep constant. The costs related to the flexible loads can be expressed as:
where
is the reduction cost per
and
is the forecast consumption at time
t.
Finally, The effective consumption at time
t is constraint as:
and the daily consumption as:
The problem of the EMS is to minimize the different costs related to the micro-grid operation, manipulating the power applied to the EVs during the recharge interval and activating flexible loads when necessary.
For a receding horizon of length
N, the problem faced by the EMS can be stated as:
where
and
are the estimates of the load power for interval
k and
is the PV power generation estimate at time
k.
Please note that to solve problem (
12), the EMS must have access, as well as to the forecast of load and PV generation, also to the arrival and departure information of the EVs for each charging station, i.e., signals
and
. These signals are not know a priori, but the recharging policy of the fleet and historical data of the fleet operation allows building adequate estimators. For example, the arrival
of each vehicle is assumed to be
, as this is the threshold to start a charging event. About the arrival time, each time the optimization algorithm is executed, an average number of charging events is estimated for the prediction horizon
, based on the data base of charging events. In this form, the optimal management of the currently connected vehicles is obtained for the most likely scenario. Then, at the next sampling time, the actual number of connected vehicles, the power forecasts and the expected EV arrivals are updated, generating a new power management policy in a receding horizon setup.
About the complexity of problem (
12), it is a linear program, whose dimensionality depends on the number of flexible loads circuits and charging stations, but not on the size of the EV fleet. It can be noticed that all the terms in the cost function depend linearly on the decision variables, the power balance is a linear constraint, flexible loads capacity and daily limits are also linear constraints, while the car-sharing policy and charging station dynamics involve also linear equality and inequality constraints. Please note that from the point of view of the optimizer, the status of each charging station
is a known binary signal, not a decision variable. These characteristics make the algorithm efficient ant scalable.
5. Numerical Results
The EMS proposed in the previous section was evaluated on a 235 days long simulation. The load and PV generation data are extracted from the data base reported in [
18]. The EV fleet recharging events are taken from the data base reported in [
17].
The sampling time of the EMS, is selected as 0.25 h. This interval is fast enough to update the scheduling whenever a EV is connected to a charging station. The minimum recharging interval is set as 4 hours, that is the period required to fully charge the vehicle using the highest power level, without any flexibility consideration. The prediction horizon is fixed as 8 h. This length allows planning the complete recharging process of all the EVs connected to the CSs at a given sampling instant.
Figure 7 shows a box-plot of the peak power requested to the grid. It can be seen that the proposed EMS reduces both the worst-case power request to the grid and the mean of the peak power along the 235 days. The worst-case peak power is reduced from 123 kW to 112 kW and the median from 105 kW to 99 kW. this effect can alleviate congestion events in the grid.
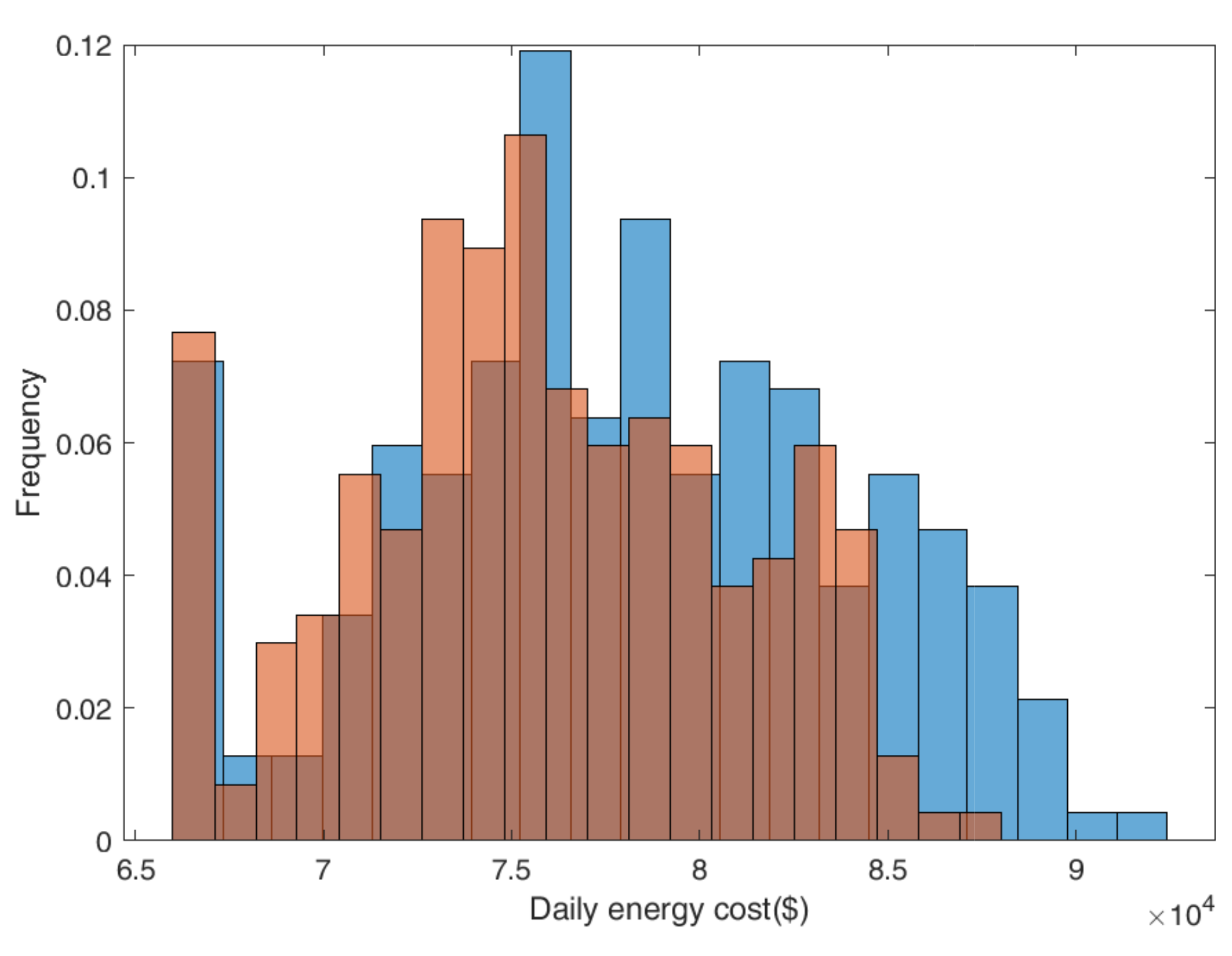
Figure 8 shows a histogram of the daily energy cost of the micro-grid. For each price bin, the vertical axis reports the percentage of the 235 simulated days that has a cost within the bin interval. It is observed that the operational costs are reduced by
in this simulation. Finally,
Figure 9 shows a sample of the daily load profile of the micro-grid. Please note that the EMS reduces the peak and generates longer charging intervals. This modification can cause a loss to the fleet operator. However, the savings in energy provision can compensate the longer recharging times.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}