2.1. Concepts of Real-Time Multi-Use Operation
In
Section 1, three types of multi-use operation are described as sequential, parallel and dynamic, which were originally identified by Englberger et al. [
24]. For all of these three types time-related constraints arise. As described in
Section 1, there is existing literature on the consideration of these time-related constraints in optimization models, which allow the calculation of an optimal allocation of resources of the BESS for several services for each time slot in the optimization horizon regarding a specific optimization goal such as maximizing revenues. As described in
Section 1, this phase is referred to as operational planning. The results of the operational planning can be used to parametrize corresponding schedules of services for each time slot in a real BESS accordingly. However, there are several services whose behavior is unpredictable during operational planning. This section discusses possible concepts to deal with such unpredictable behavior of services during real-time operation.
In this paper, the implementation of a service in a BESS is referred to as “function”. A service is considered as an abstract definition, whereas a function is a detailed definition of its implementation in a system. The implementation of a service as a function may differ between systems. Therefore, functions describe in detail how a service is executed. Besides such functions that are executing services, there may be additional functions that are necessary to operate a BESS or to guarantee the continuous execution of services. For example, the management of the state of charge (SoC) is one such function.
The first concept of real-time operation is based on a given allocation of virtual BESS for different services, which is the result of the operational planning for a specific time slot. The resources of a BESS can be split up into several virtual BESS. Such a division into virtual BESS has to be done for the power resources and the energy resources of the BESS, resulting in corresponding power bands and energy bands that represent the share of resources of each virtual BESS related to the total resources of the BESS. However, there is a difference between power bands and energy bands in the way they are influenced during real-time operation. While the power band of a virtual BESS defines the limits within which the operating point of an assigned function is allowed to operate, the energy band of a virtual BESS defines the reservation of energy resources of the BESS for a later usage by the corresponding function.
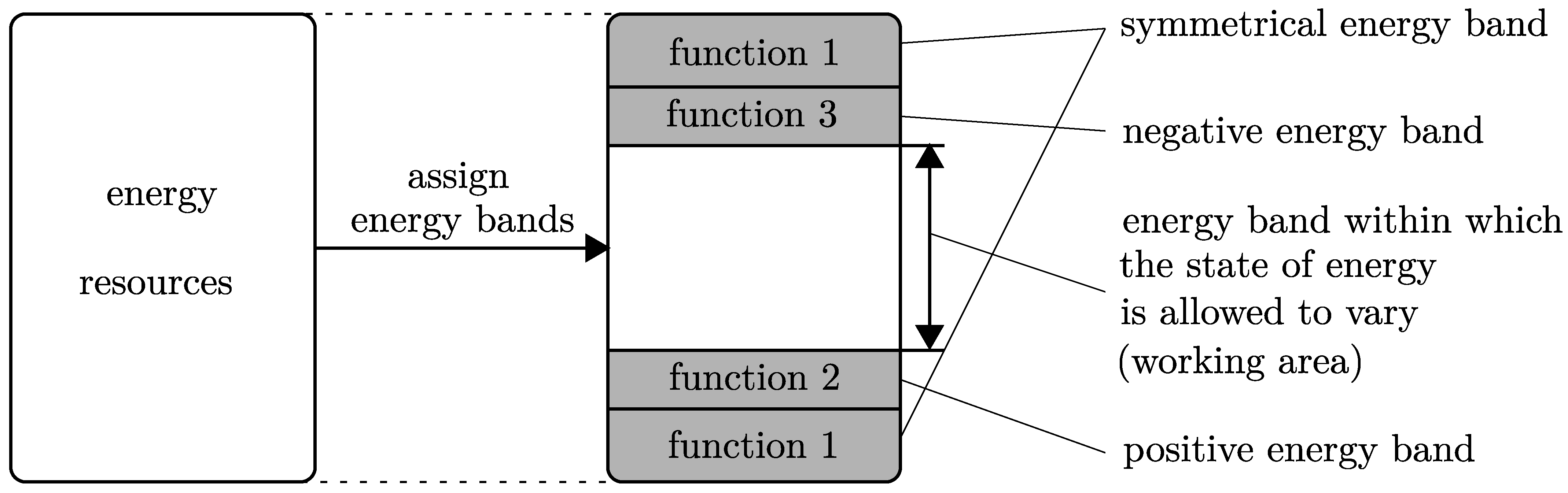
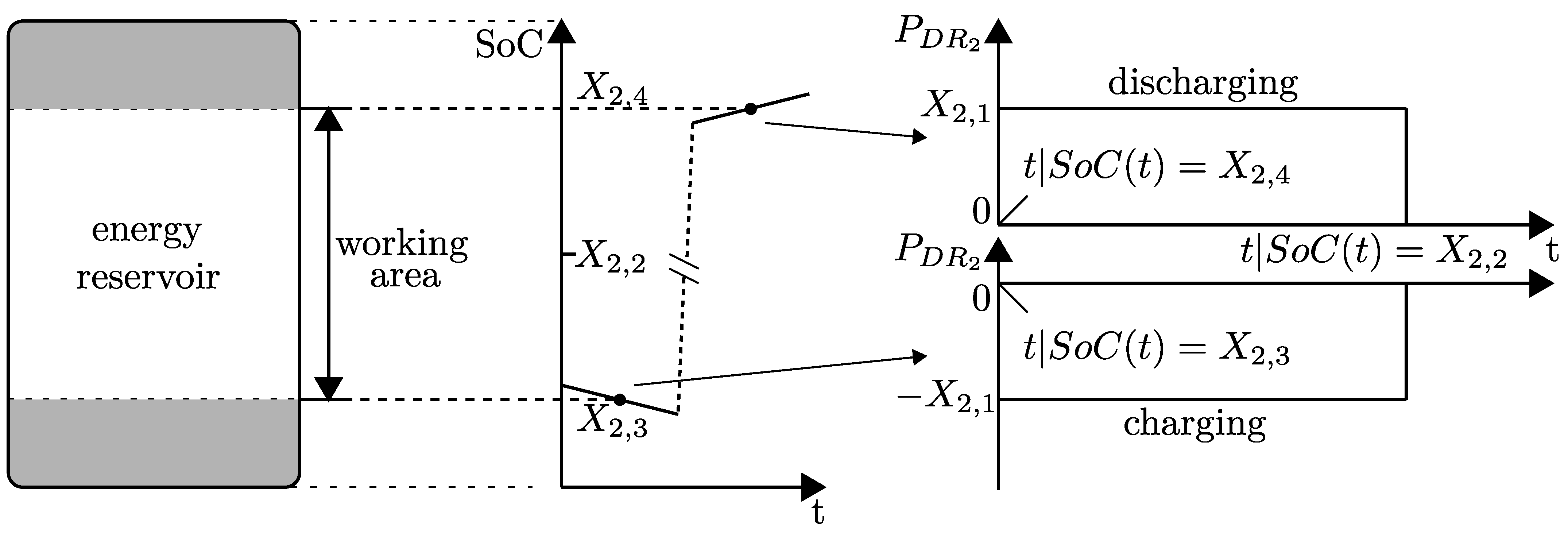
Figure 2 illustrates the first concept of real-time multi-use operation based on the allocated energy bands for each function in a specific time slot. A BESS that executes four services is assumed. Since the state of energy is a state variable it has an influence in which way the energy band of the corresponding virtual BESS is allocated within the energy resources of the BESS. The energy bands can either be allocated symmetrically, positively or negatively. In the case of symmetrical allocation, the energy resources of the corresponding virtual BESS are allocated with half their value in the upper and lower region of the energy resources. In case of positive allocation the energy resources of the corresponding virtual BESS are allocated in the lower region of the energy resources. In case of negative allocation, the energy resources of the corresponding virtual BESS are allocated in the upper region of the energy resources. A symmetrical allocation ensures that the BESS can store and provide energy at a later point in time, while a positive allocation only ensures the provision and a negative allocation only ensures the storage at a later point in time. As described in [
32], an example of a service that requires symmetrical allocation is FCR. An example of a service that requires negative allocation is peak shaving. Peak shaving requires specific negative energy resources to be available in advance of its activation in order to be able to store energy while it is active. An example for positive allocation is the provision of firm capacity. Providing firm capacity requires specific positive energy resources to be available in advance of its activation in order to be able to provide energy while it is active. Furthermore, there are functions whose requirement for an energy band is zero. All voltage control services are of such type.
Figure 2 shows a symmetrical allocation for function 1, a positive allocation for function 2, a negative allocation for function 3 and no energy band for function 4 in order to illustrate the resulting energy band, the so-called “working area”, within which the state of energy of the BESS is allowed to operate.
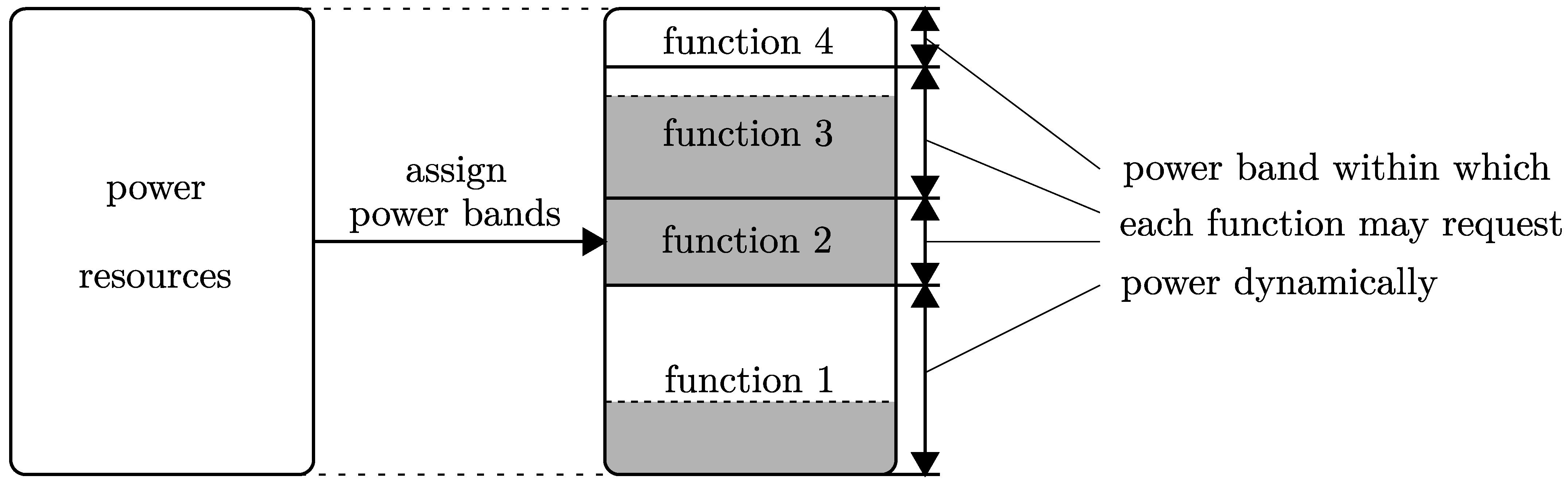
Figure 3 illustrates the first concept of real-time multi-use operation based on the allocated power bands for each function in a specific time slot. A BESS that executes four services simultaneously is assumed, where function 1 and function 3 are only partly exploiting their power band, whereas function 2 fully exploits its power band and function 4 does not have any power output. Conflicts of functions are avoided on the basis of such a concept. Since power resources are divided in advance to the actual real-time operation, the sum of the power output of all functions cannot exceed the power resources of the BESS.
However, most of the unpredictable services require large amounts of power resources only during rare events such as abnormal grid conditions. On the one hand, these power resources have to be reserved in corresponding virtual BESS at all times, but on the other hand, this reduces the flexibility for other services. With regard to
Figure 3, such a situation may arise when function 1 and function 4 are assumed to be functions that execute such unpredictable services. Most of the time their request of power resources is small compared to the size of the allocated virtual BESS. The flexibility to allocate resources for function 2 and function 3 during operational planning therefore is limited, although a high share of the resources is unused most of the time.
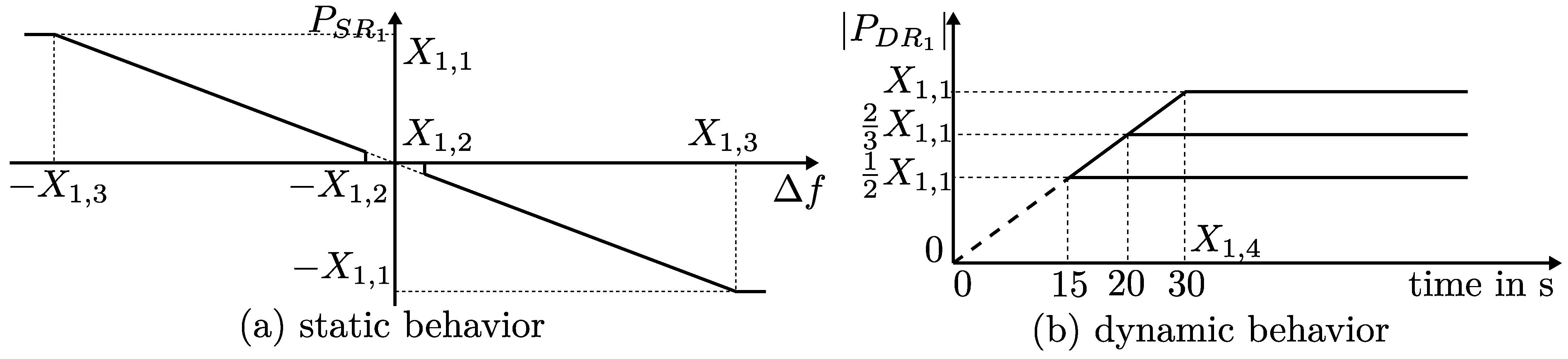
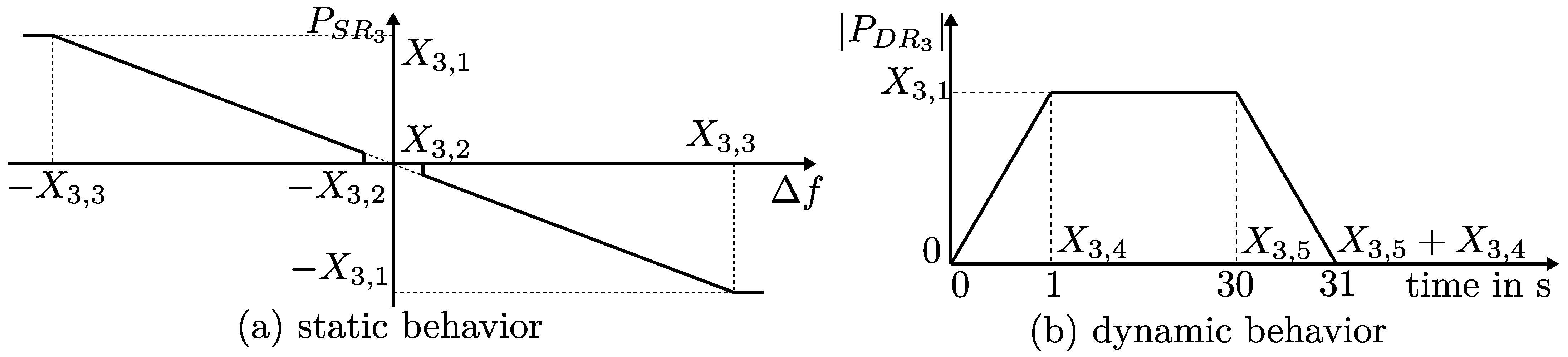
The question arises as to whether there are services that are capable of using the same resources and whether there are situations when the concept of virtual BESS needs to be expanded. Sharing energy bands is not possible, but sharing power bands is an option. For example, different services for frequency control may be considered as decoupled in time to some extent and may be candidates to use shared power bands. Furthermore, there are services whose provision quality is not affected by the short-term sharing of power bands. As will be shown in
Section 3.1, static voltage support can be considered as such a service. Besides the argument of better utilization of resources, there are services whose resource demand cannot be identified in advance and which may require the concept of allocation of virtual BESS to be overruled in order to contribute to system stabilization. As will be shown in
Section 3.1, dynamic voltage support can be considered as such a service. All of these thoughts are considered in the next concept, which is described below.
The concept of dynamic prioritization is also based on the allocation of virtual BESS and allocates energy bands identical as shown in
Figure 2. However, regarding power bands, an allocation is only done for functions for which such an allocation is possible. Based on priorities, the power resources of virtual BESS for functions with lower priority are made available for functions with higher priority when required. With such an approach it is possible to deal with the unpredictable behavior of services in such a way that during abnormal grid conditions they can exploit the corresponding resources but at the same time do not waste resources through corresponding reservations during normal grid conditions.
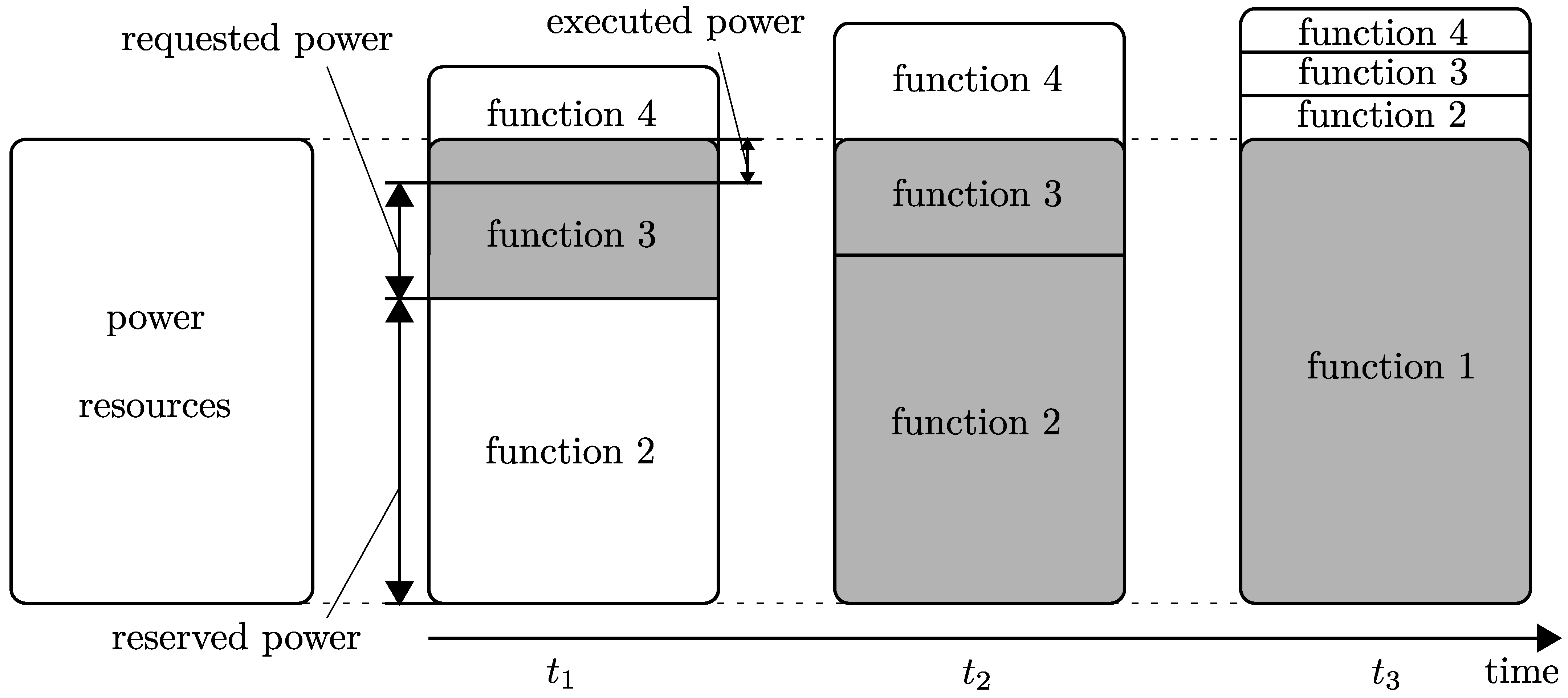
Figure 4 illustrates this concept of dynamic prioritization, again assuming a BESS providing four functions.
Priorities are assigned beginning with function 1, which is assigned the highest priority, up to function 4, which is assigned the lowest priority. In this example a virtual BESS with a corresponding power band is assigned only to function 2, which ensures the reservation of certain power resources of the BESS. In order to describe the behavior of functions in this concept, it is distinguished between
reserved power: power resources according to the size of the virtual BESS assigned to the corresponding function,
requested power: real-time power demand of the function and
executed power: power output the system is able to execute for the corresponding function.
An activated function is allowed to reserve-, request- and execute powers, whereas a deactivated function is not allowed to do so. A function is active only when its executed power differs from zero, otherwise the function is inactive.
Figure 4 shows three different situations at the time
,
and
, where the four functions are activated and have different requested powers for each situation. At the time
function 1 and function 2 are inactive. However, for function 2 power resources are reserved according to the size of the allocated virtual BESS. Function 3 and function 4 are active and are using the remaining power resources. However, since the requested powers of all functions exceed the power resources there is a conflict of functions, which is resolved based on the priorities. Since function 3 has a higher priority than function 4, the requested power of function 3 can be fully executed, whereas the requested power output of function 4 is limited, leading to an executed power that is lower than the requested power. At the time
function 2 fully exploits its allocated power resources and even requests a higher amount than reserved according to its virtual BESS. Due to the priorities, the power requests of function 4 cannot be executed any more and the function becomes inactive. At the time
it is assumed that an abnormal grid condition leads to a power request of function 1 that fully exploits the whole power resources of the system. Due to the highest priority of function 1, requested powers of all other functions cannot be executed any more and power reservations are overruled. Therefore, the functions 2–4 become inactive.
Compared to the concept of virtual BESS of
Figure 3, which prevents the occurrence of conflict of functions, the concept of dynamic prioritization of
Figure 4 handles conflicts based on the priorities assigned to each function.
At the times
and
the whole power resources of the BESS are exploited. Assuming an immediate transition between these two situations, the question arises as to what influence the different assignments of power resources have, since the total power output of the system does not seem to change. The description of concepts in this section is based on a one-dimensional view. For example, it is not distinguished between active- and reactive power. Assuming the function 2 and function 3 to request active power and function 1 to request reactive power in
Figure 4, the change of the total power output between the time
and
becomes visible. There are several other dimensions that have to be considered during the multi-use operation. Besides the active- and reactive power, for example, the influence of asymmetry and harmonics has to be taken into account. With consideration of such additional dimensions, a change of assignments at the time
and
in
Figure 4 therefore has an influence on the total power output of the system, since the waveform may change depending on the functions that are active. The sign of the power is an additional matter that is not considered in the exemplary descriptions above.
2.2. Considerations on the Realization in Battery Converters
The descriptions of concepts in
Section 2.1 are based on the assumption of a limited power capability of a BESS. To describe concepts, this assumption is helpful, because it allows a simplified description, but in more detail this limited power capability goes back on the maximum current a BESS is capable of handling, which is limited by its converter. This maximum instantaneous current
, therefore, is the ultimate value, which has to be considered in the converter control. As already described at the end of
Section 2.1 there are several dimensions that have to be taken into account when assigning power resources to different functions. Compared to the one-dimensional examples described in
Section 2.1, the realization of a multi-use operation in a converter control structure requires a multi-dimensional assignment of resources. A typical converter control structure, such as described in [
33], consists of a power control and a current control. Active- and reactive power set points are used to calculate current set points, which are typically described by a normalized current space vector
. The nomenclature used in the following descriptions is summarized in Nomenclature. A summarized list of all symbols used in this paper can be found in
Appendix B.
An assignment of resources has to ensure the condition
at any time. Therefore, an extended version of the concept described in
Figure 4 has to be applied, which takes into account the multi-dimensional character of the current space vector
.
Such an extended version of the concept of
Figure 4 is described in
Section 2.3. Based on a mathematical framework, which allows the definition of functions, the description of their behavior regarding requested powers and the formulation of a dynamic prioritization of functions based on priorities, a systematic description of a real-time multi-use operation of BESS is possible.
2.3. Mathematical Framework to Describe a Multi-Use Operation
The multi-use operation is based on a set of functions
where each function
, with
describes the behavior of the corresponding service the BESS provides. The number of functions is
. A function is either activated or deactivated. This activation of functions is described by the set
with
, and where
means the function
is deactivated, and where
means the function
is activated. There may be functions that must not be activated at the same time because they are incompatible. These forbidden activations are summarized in the set
According to
Section 2.1 it is distinguished between the reserved-, the requested- and the executed power. Each function
describes the behavior of its requested power, based on a set of parameters
where
is the number of parameters of the function
and a set of control variables
where
is the number of control variables of the function
. Based on these parameters
and control variables
the behavior of the requested power of each function
can be described. The requested power is divided into two parts, a statically requested part and a dynamically requested part. The statically requested power represents the static operating point, whereas the dynamically requested power represents the dynamic behavior of the power output that follows this operating point. The statically requested power of a function
is defined by
and the dynamically requested power of the function
results from the dynamic behavior, defined in the parameters of the function, and the statically requested power
Both the statically- as well as the dynamically requested part are apparent powers, which consist of an active- and a reactive power, which are and for the statically requested power and and for the dynamically requested power.
Many functions only request either active- or reactive power. The two sets
and
therefore are defined by
and include the corresponding functions that only request active- or reactive power. All functions included in the set
are called “active power functions” and all functions included in the set
are called “reactive power functions”.
As described in
Section 2.2 the converter control structure typically includes the inverter current control, whose input are four Park-components, which are summarized in the vector
The contribution of each function
to
has to be calculated based on the dynamically requested power
on the basis of the corresponding current request:
Besides the requested power,
Section 2.1 lists the reservation of power resources in order to ensure that functions are capable of executing certain power increments at any time. Such a power reservation of a function
results in a corresponding reservation of current reserves in the “power control” of
Figure 4, which is defined by
and reserves either positive-, negative- or symmetrical power resources. For example, FCR requires a symmetrical reservation of power resources, whereas for aFRR it is possible to tender positive- and negative products separately.
In
Section 2.1 a conflict of functions was indirectly defined as a situation where a function requests power but is prohibited to execute it. With regard to the corresponding current request
, such a situation is characterized by a limitation of
. Therefore, the different current contributions of functions sum up to
where the executable current request of each function
is
. This executable current request is defined by
and depends on the requested current
and the already “occupied current capabilities”
of functions with higher priority than the function
, which will be defined in Equation (
23).
In case of a conflict of functions, at least one current request
of a function
has to be limited, which leads to
To manage such a conflict of functions a set of priorities is defined by
Each function is assigned a priority according to
A function
has highest priority when
and it has lowest priority when
. When a conflict of function occurs, the current requests
of functions are limited, beginning from the function
with lowest priority
, up to the function
with highest priority
, until the condition according to Equation (
1) is fulfilled. In order to identify the functions which have to be limited, a set
is defined for each function
, which consists of all function indices with higher priorities than
. These sets
are defined by
In order to calculate the limited currents for each function
in case of a conflict of functions, a matrix
is defined by
which describes the already “occupied” current resources considered from the point of view of function
and where the value of
m is depending on the number of current requests, which exceed the current reservation of the corresponding function. In case there are no current reservations, this leads to
. In case of at least one function with higher priority reserving current resources symmetrically and assuming all current requests are zero, this leads to
, since every symmetrical current reservation has to be taken into account with positive- and negative sign. In order to realize a behavior as shown in
Figure 4 the occupied current resources for each function
are depending on the current requests
and current reservations
of all functions with higher priority than
. Since each function may have positive-, negative- or symmetrical current reservations and may be an active- or reactive power function, this leads to a rather complex structure of Equation (
21). The first part of the case distinction in Equation (
21) takes into account a situation when a current request exceeds current reservations but also comes into force when a function has no current reservation. For example, a current request
with a corresponding current reservation
and a current request
has to result in executable currents of
and
when
and
. However, current reservations only have to be taken into account for the corresponding type of function. For example, for an active power function
only current reservations of other active power functions with higher priority have to be taken into account, whereas current reservations of reactive power functions do not have to be taken into account. Such a behavior is described by the second and third part of the case distinction in Equation (
21).
Each column vector in
can be assigned a maximum phase current that would occur in one of the three phases, in case the corresponding vector would be executed. The set of these maximum currents where each entry is the maximum phase current of the corresponding column vector out of
is defined by
where
is the angle between the positive- and negative-sequence system. In this set of maximum phase currents
, a maximum
can be found, which is assigned to the corresponding vector. This corresponding vector that leads to this maximum phase current is defined by
The maximum phase current
and its corresponding vector
can be used to calculate the executable currents of each function
by
where the lower part of the equation corresponds to Equation (
16) and leads to a current limitation of the current request of function
. A detailed description of the calculation of this current limitation
of Equation (
24) is described in
Section 2.3.1.
Calculation of Limited Currents
Any current space vector
in the
-plane is a function of its Park-components, the grid angle
and the angle
between positive- and negative-sequence system:
Assuming there is no zero-sequence system, the relationship between a current space vector in the
-plane and a current space vector in the
-plane is given by the Park-transformation
In more detail, a current space vector can be expressed by
where a division of the space vector
in a positive-sequence part
and a negative-sequence part
is considered. Each of these two parts can be further divided into a direct- and a quadrature part by using
All four Park-components can be summarized in a vector
. The instantaneous phase currents
can be calculated by projecting the space vector
on the corresponding phase:
To calculate the maximum phase current, the corresponding grid angle
, which is calculated by
can be used as follows
Equation (
32) can be used to calculate the individual maximum phase currents in Equation (
22):
which leads to the maximum phase current
in Equation (
23).
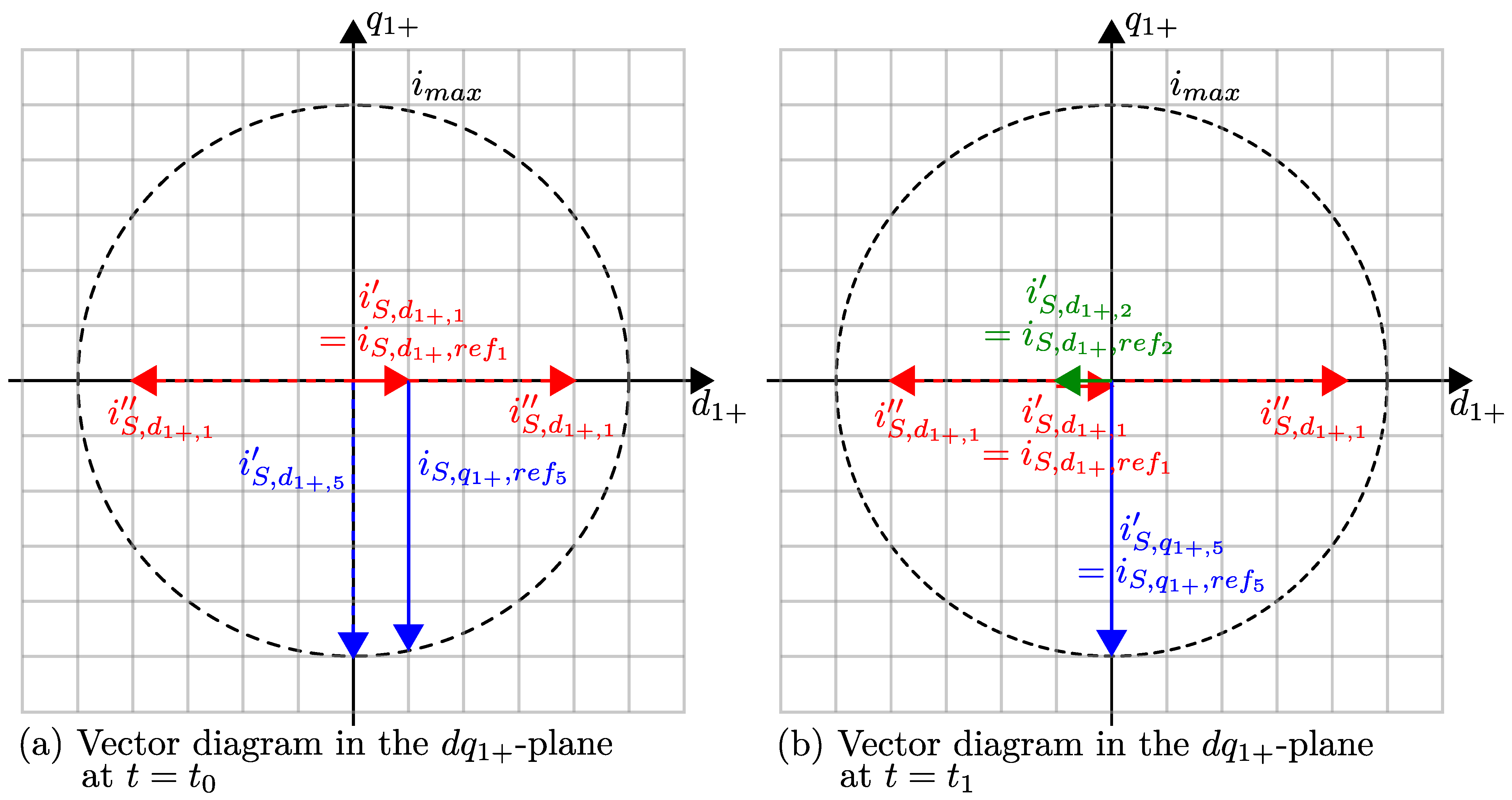
When a current limitation according to the lower part in Equation (
24) is necessary, a procedure has to be defined, that determines which of the four components of the corresponding current request
of a function
have to be limited and to what value they have to be limited. In Equation (
24) this procedure is represented by the term
. In order to describe this term in more detail all functions that need to be limited have to be identified first. The case distinction in Equation (
24) implicitly reveals all functions that have to be limited. According to Equation (
24), all functions
with the function index
k out of the following set
have to be limited. In this set
, the function with highest priority can execute a limited amount of its current request, whereas the current request of all other functions have to be limited to zero. This function
is defined by
For this function
, the limited currents have to be calculated explicitly, whereas for all other functions
, the corresponding executable currents
according to Equation (
24) are zero:
For the calculation of
of the function
, a stepwise approach as described in [
33] can be applied under the use of
, where
consists of fixed values of executable currents of functions with higher priority than the function
and
is to be calculated by the current limitation algorithm described in [
33]. In a first step, a prioritization of the direct- or quadrature components of the function
has to be defined. For the sake of simplicity, this prioritization is assumed for the quadrature components, identical as in [
33]. Furthermore, it is assumed that the
-component is zero. Taking into account these assumptions, the three remaining components
,
and
can be calculated according to the Algorithm described in [
33].





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










