
Implementation of an FPGA-Based Current Control and SVPWM ASIC with Asymmetric Five-Segment Switching Scheme for AC Motor Drives

Abstract
:1. Introduction
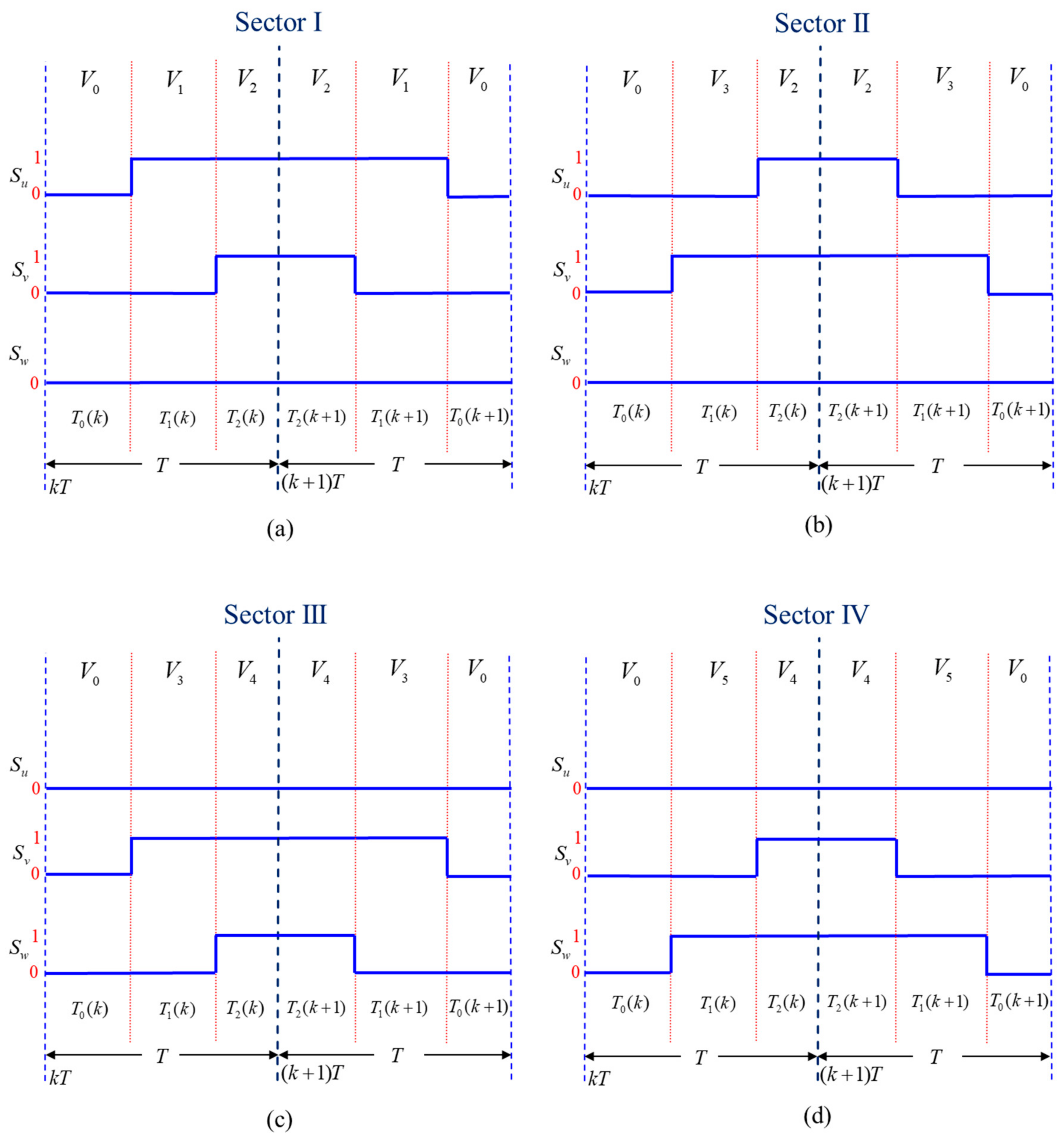
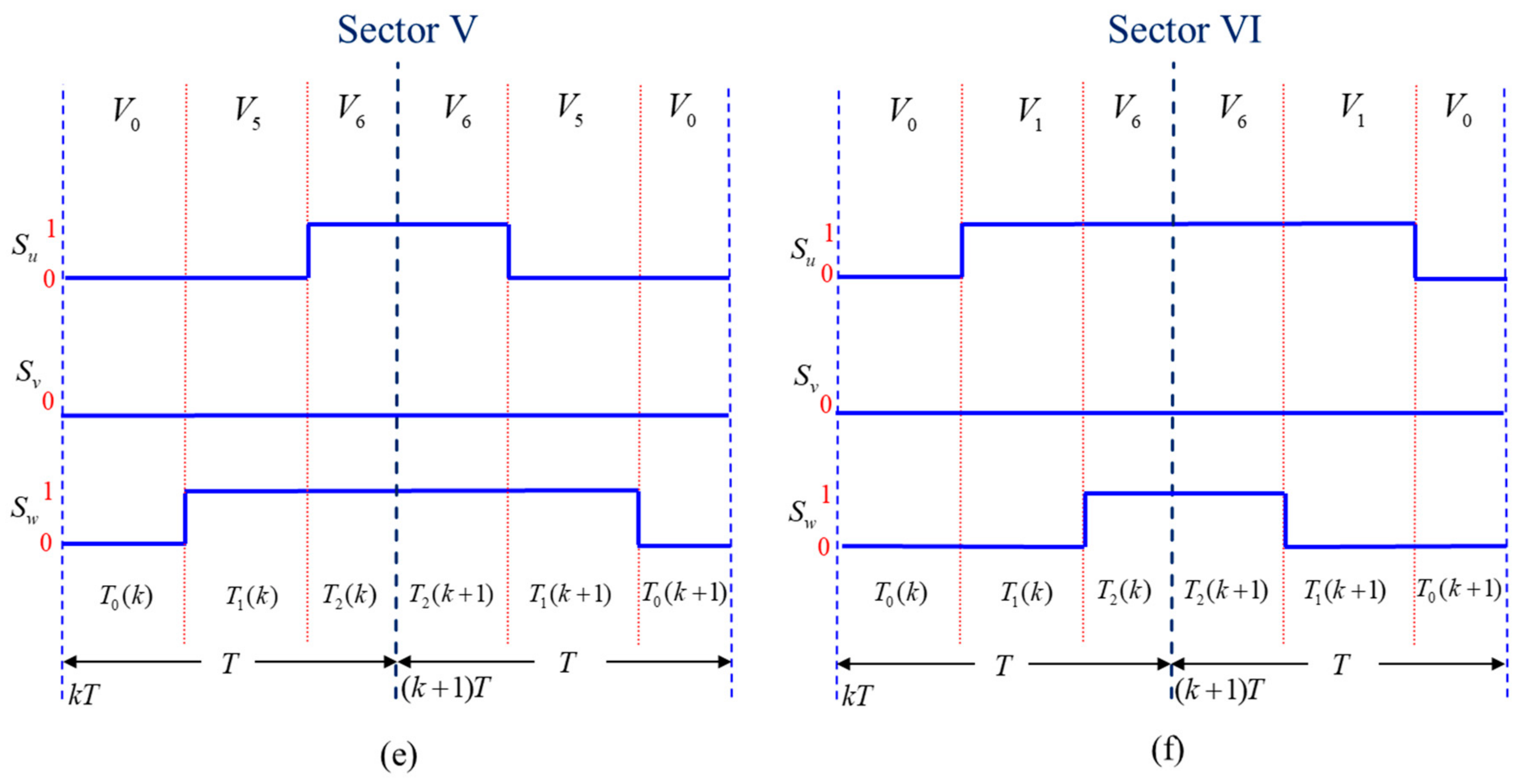
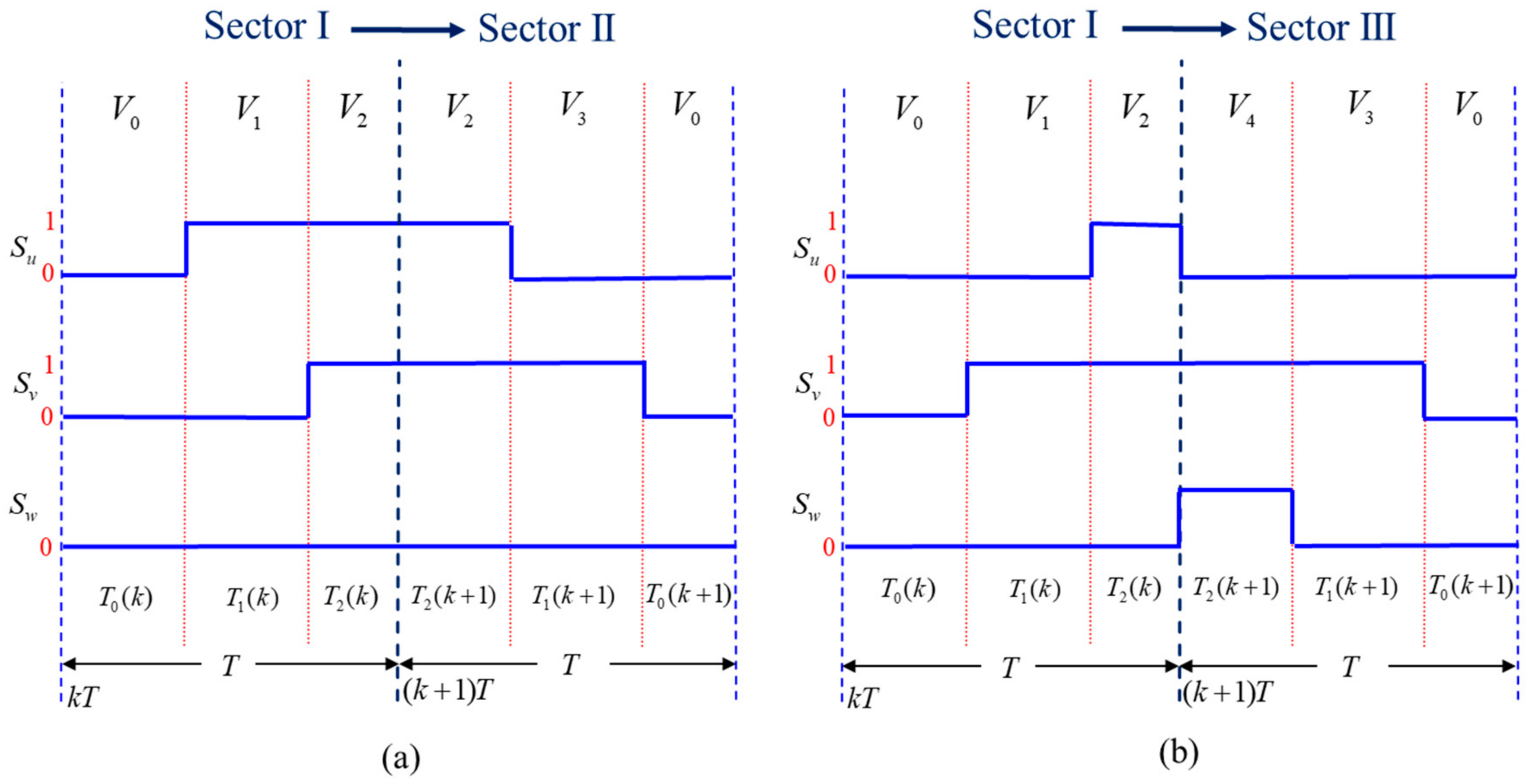
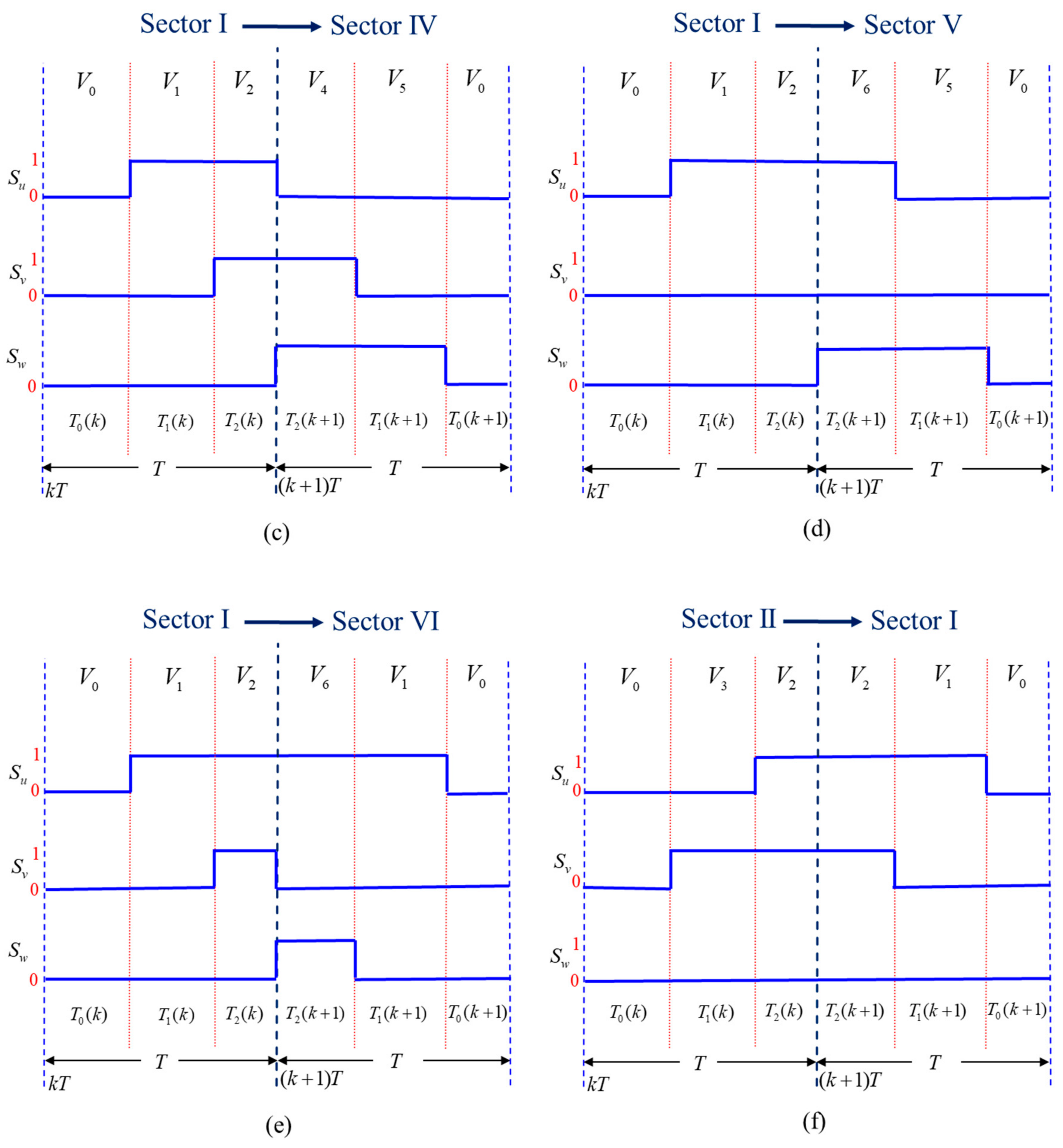
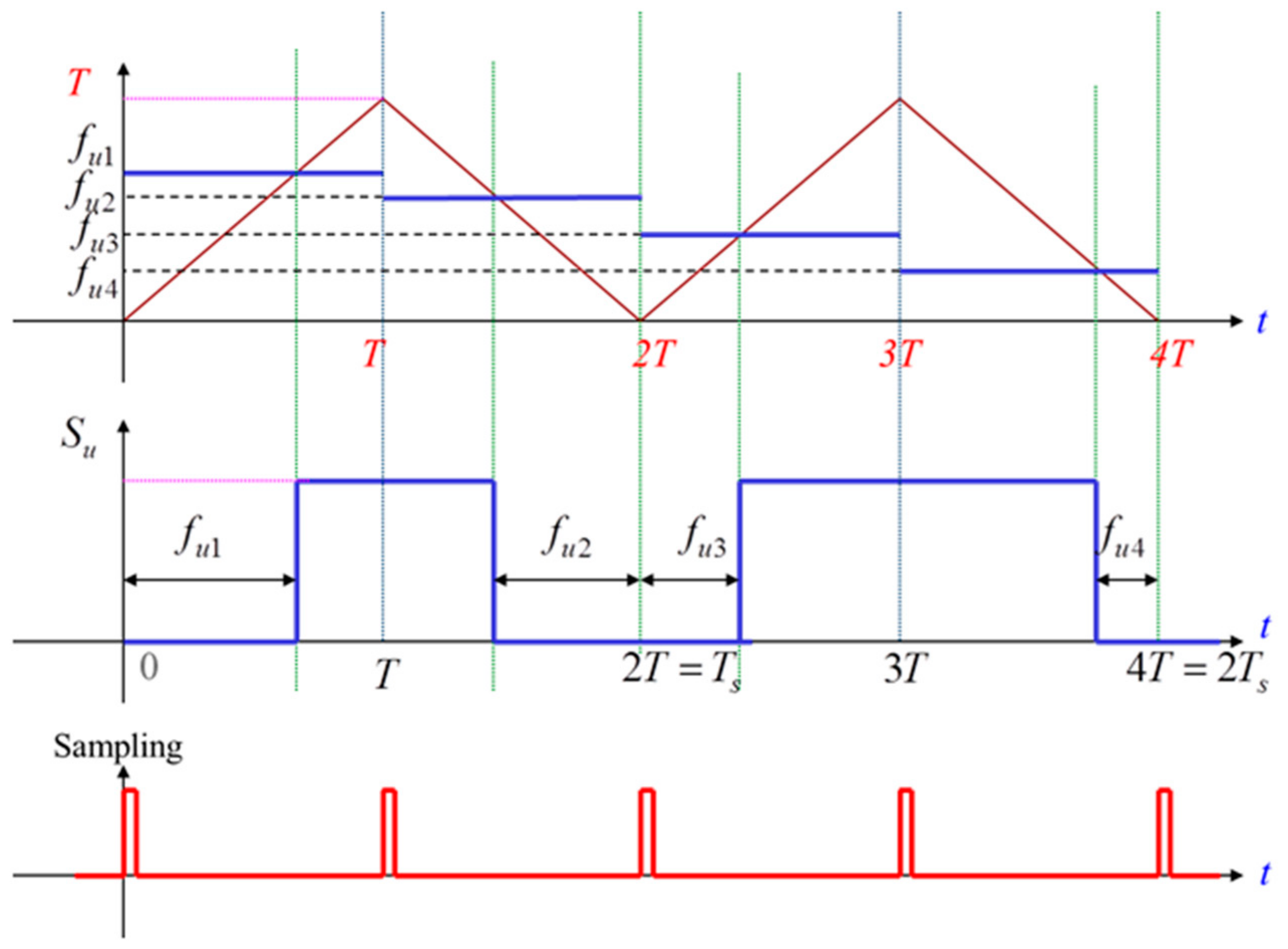
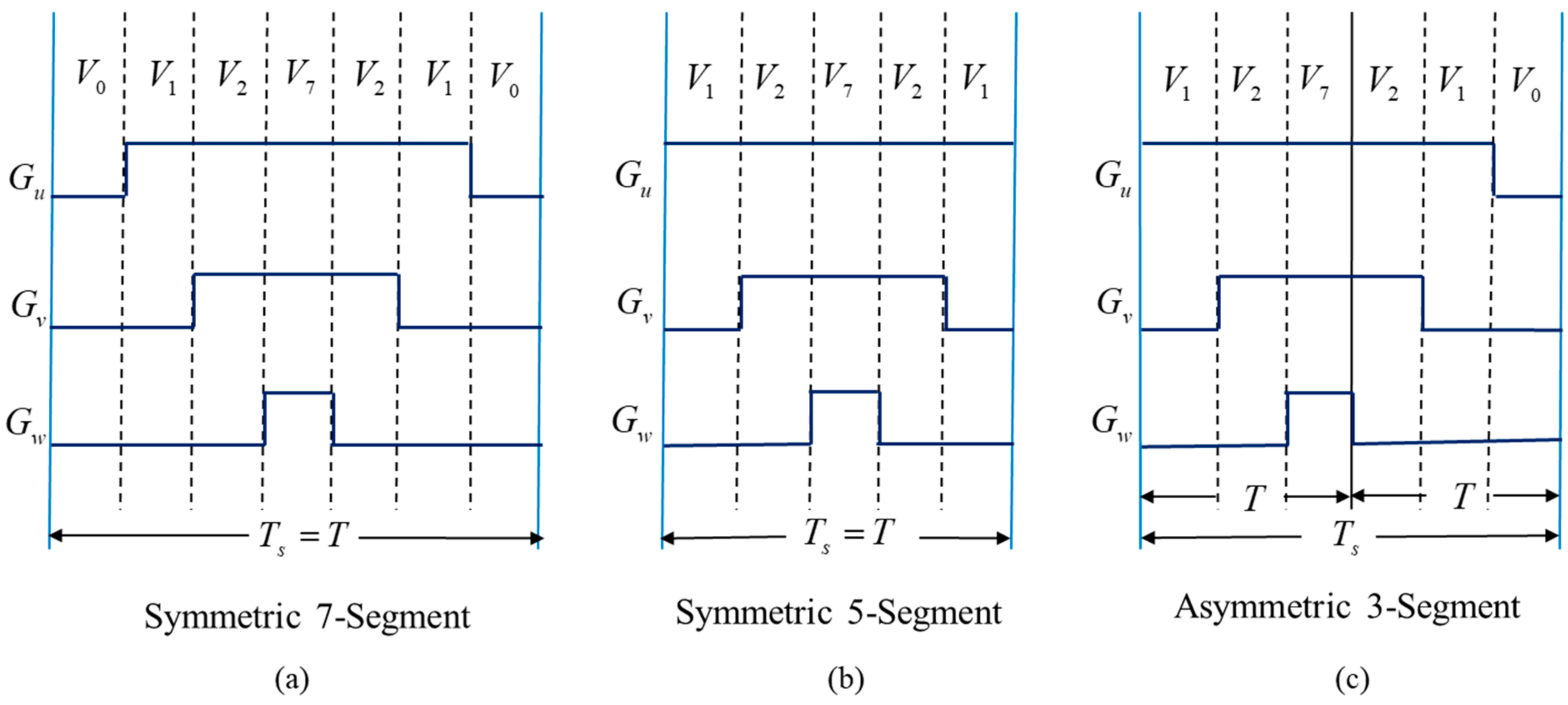
2. The Principle of the Asymmetrical Five-Segment Switching SVPWM Modulation
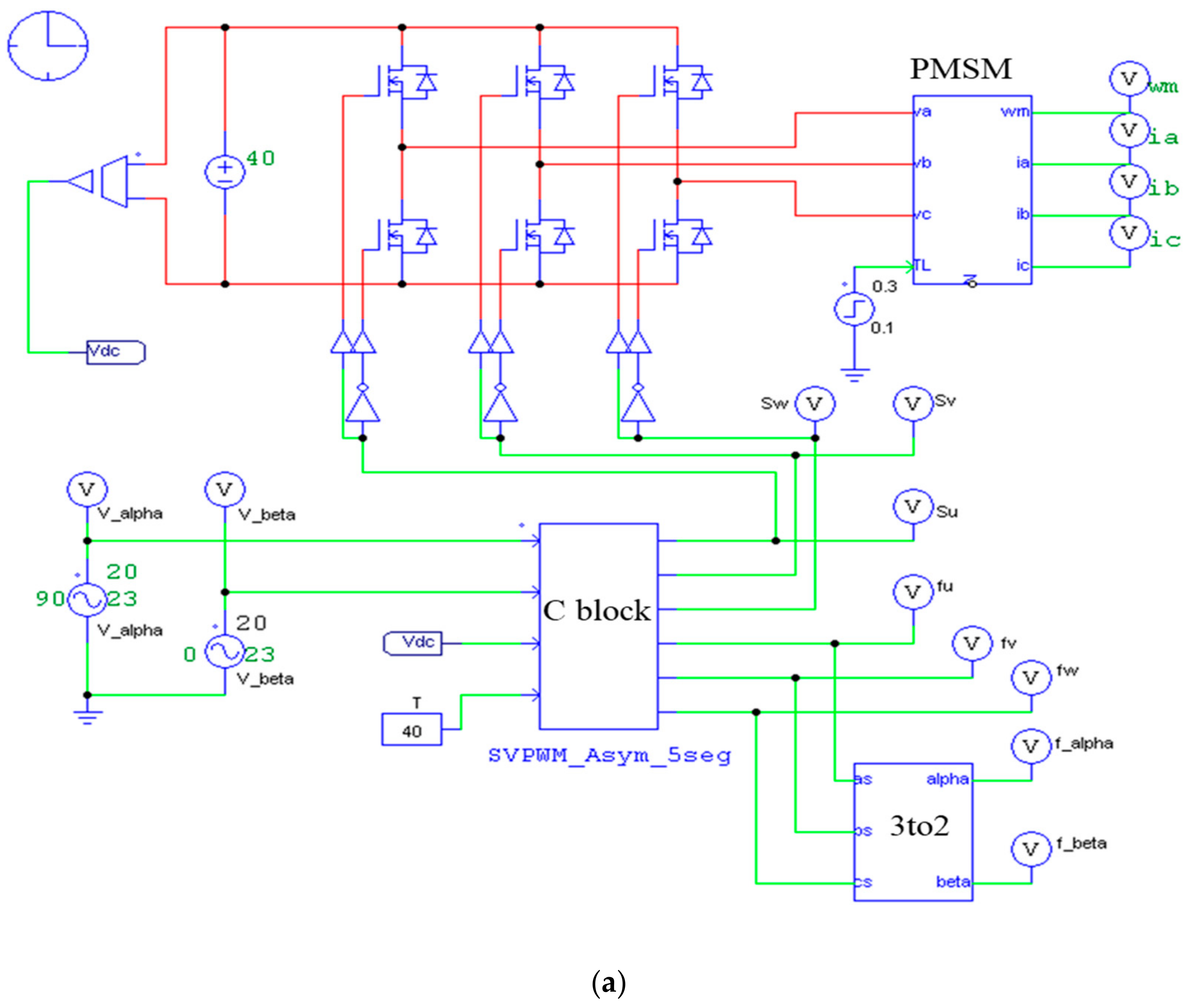
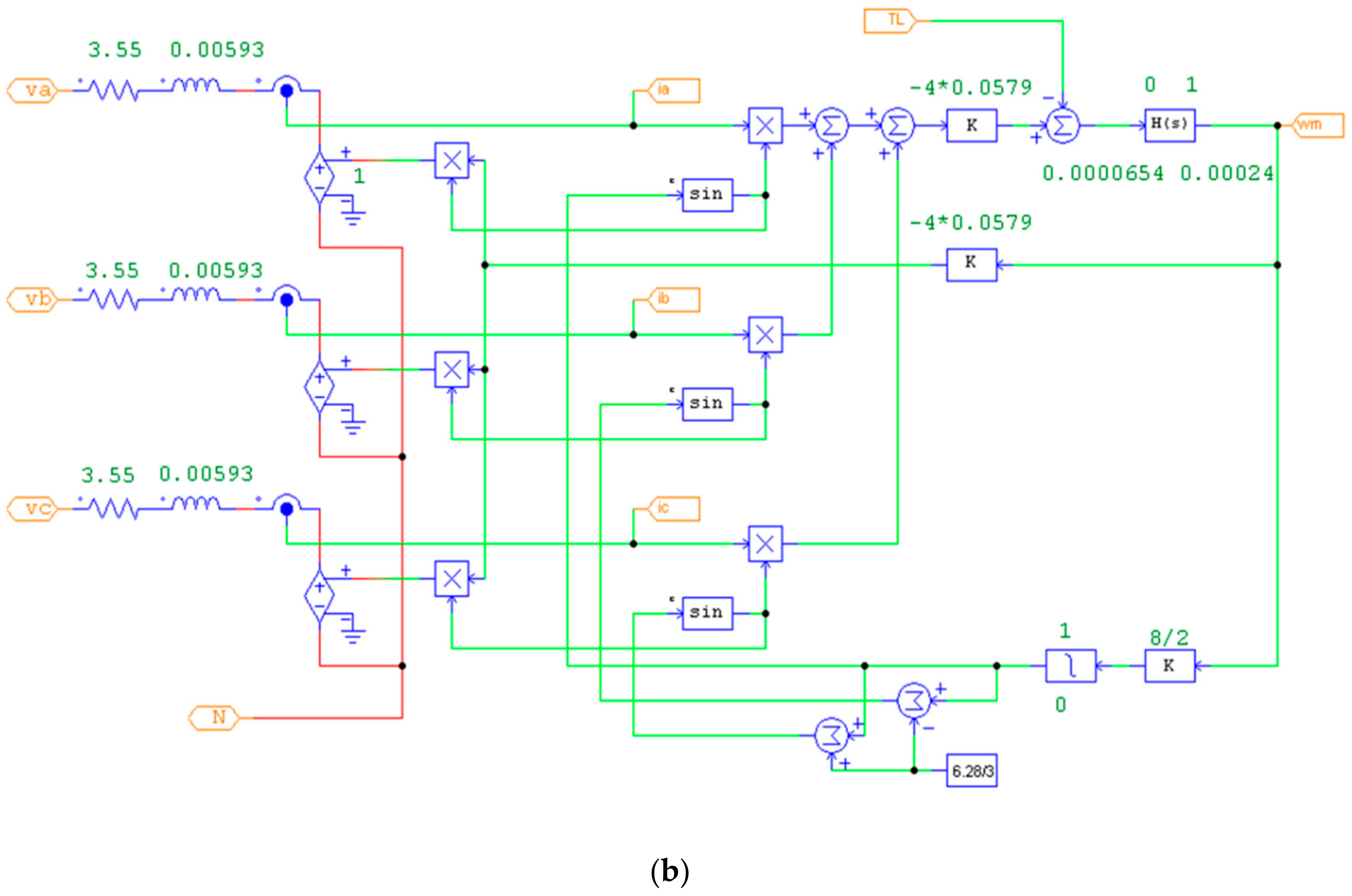
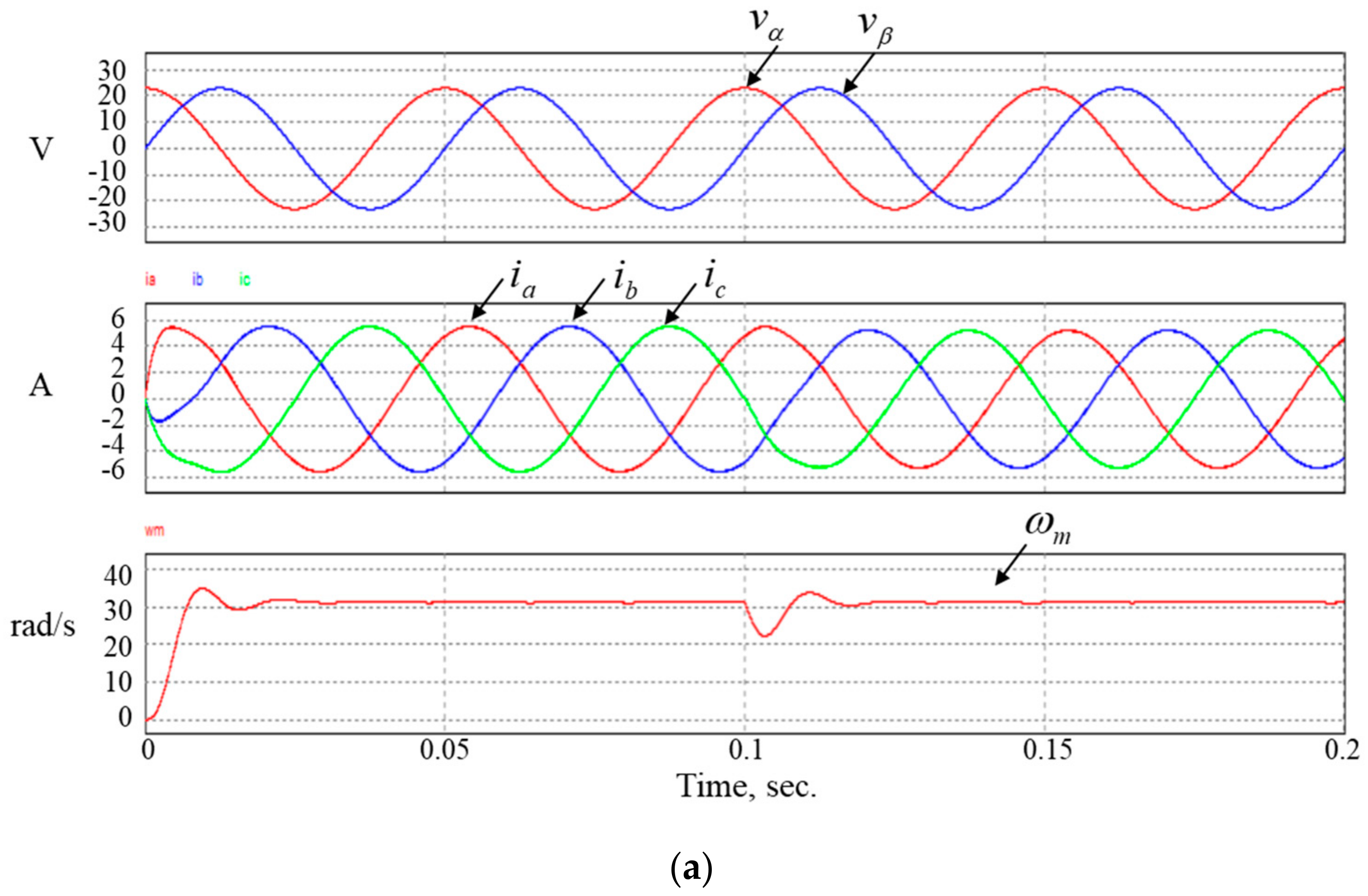
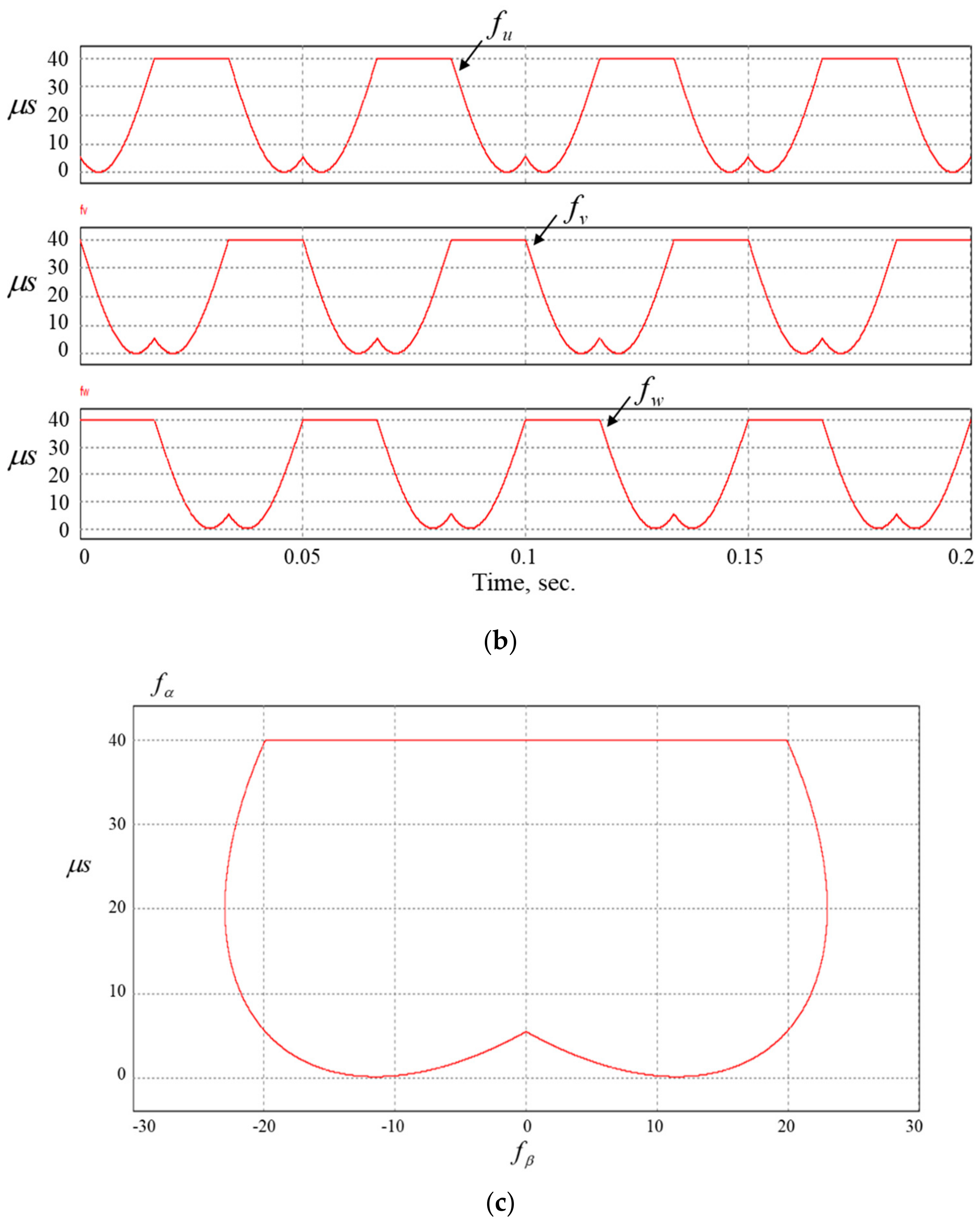
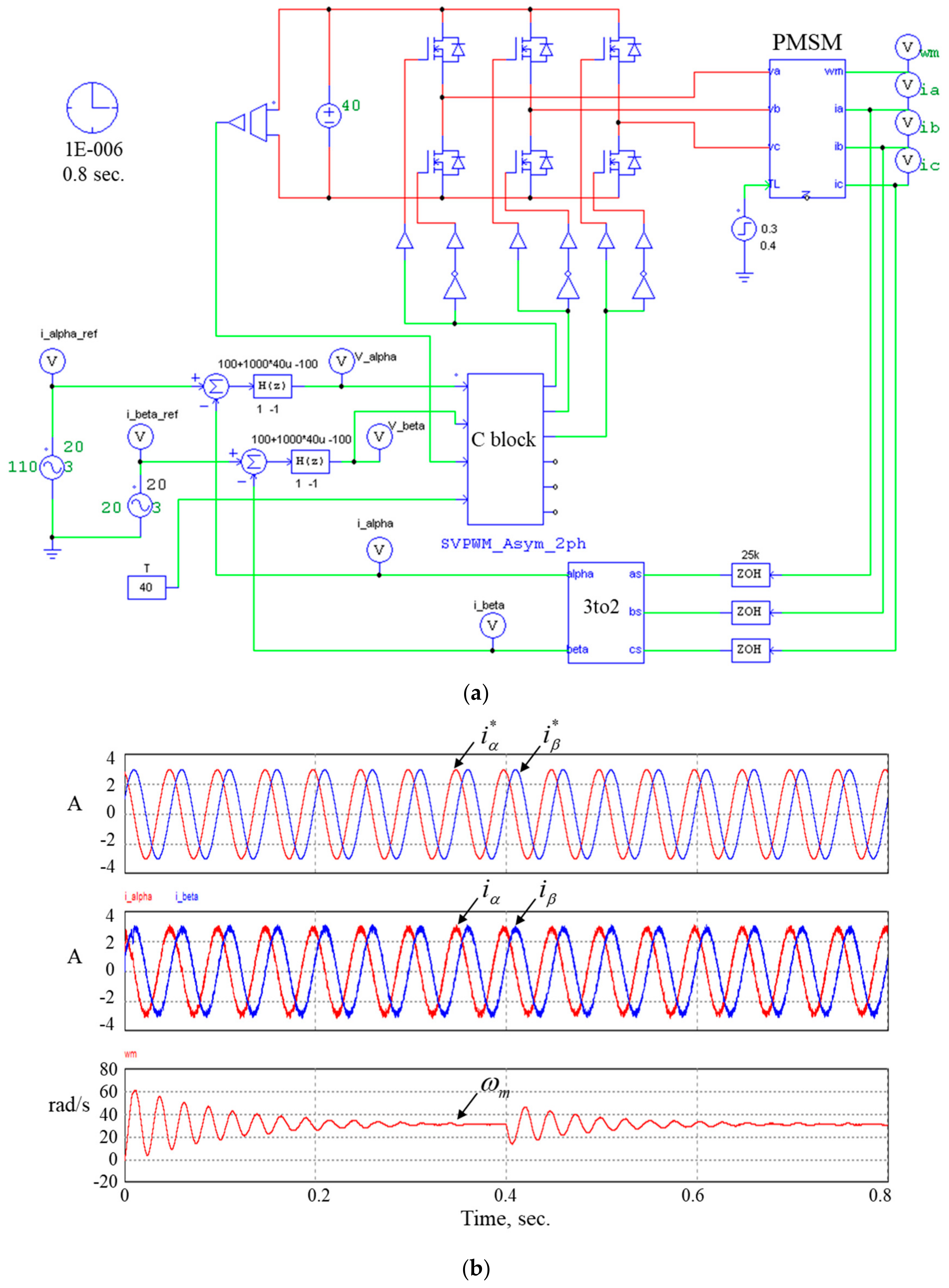
3. Simulation Verification Using PSIM
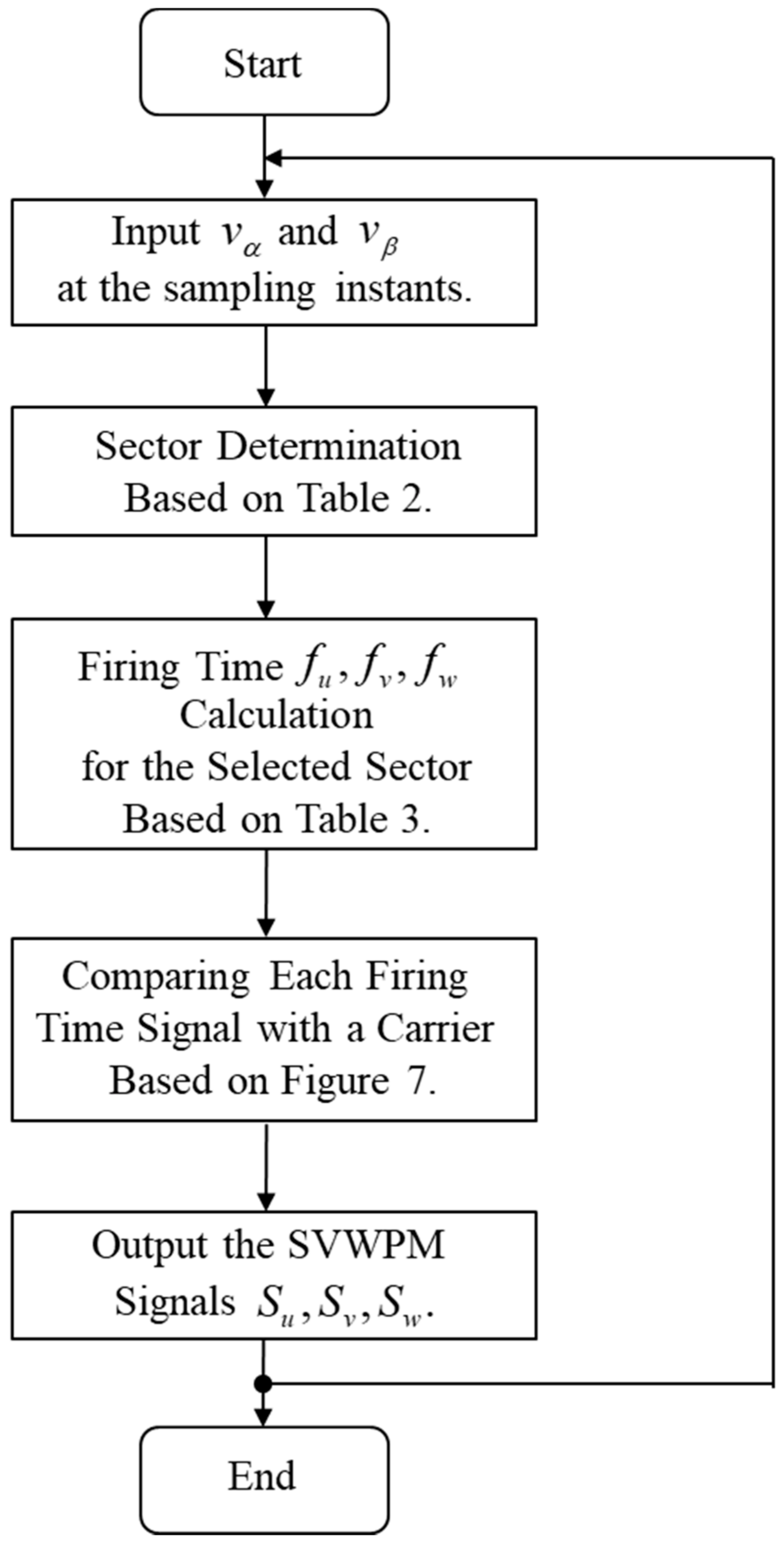
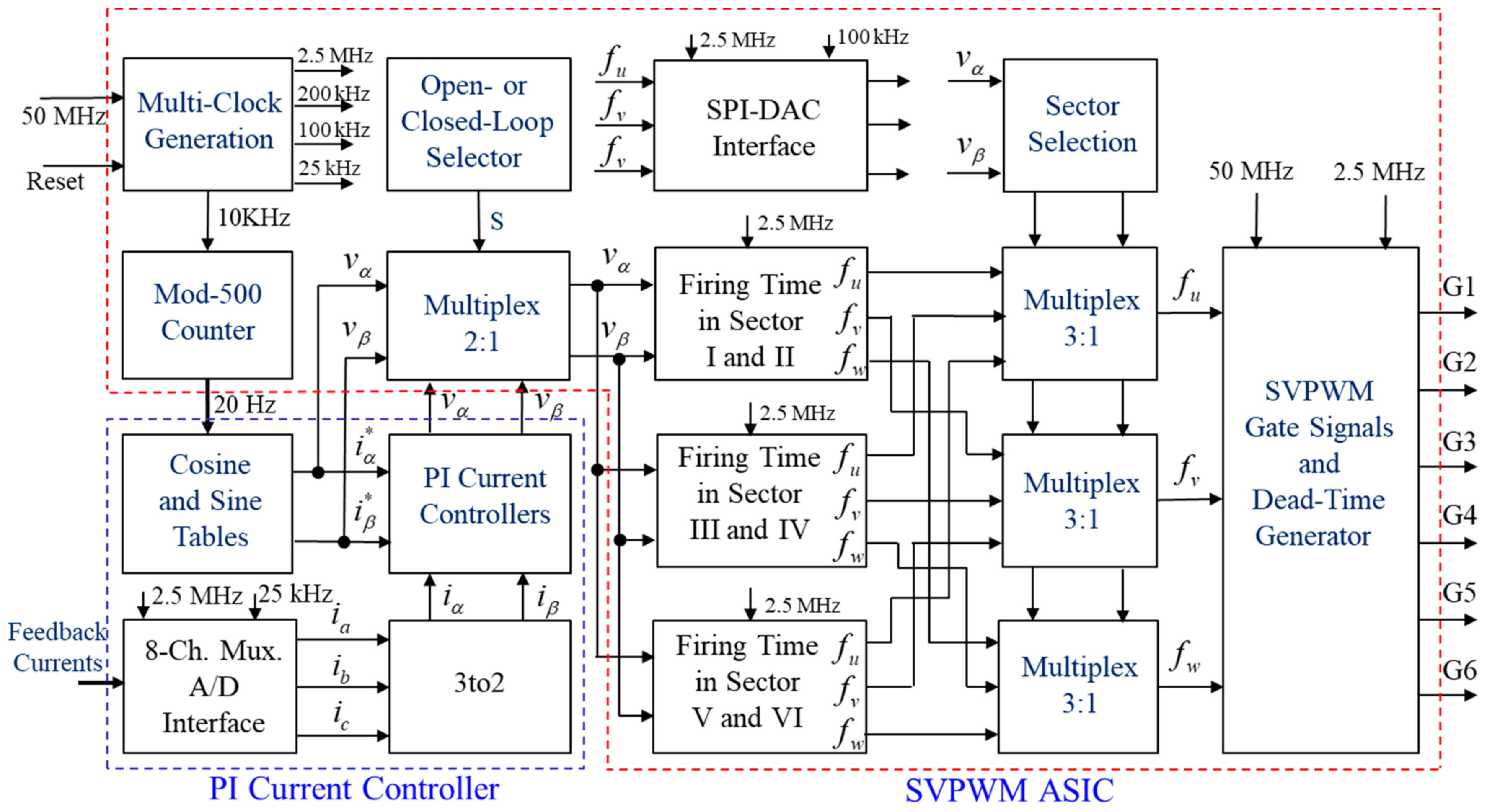
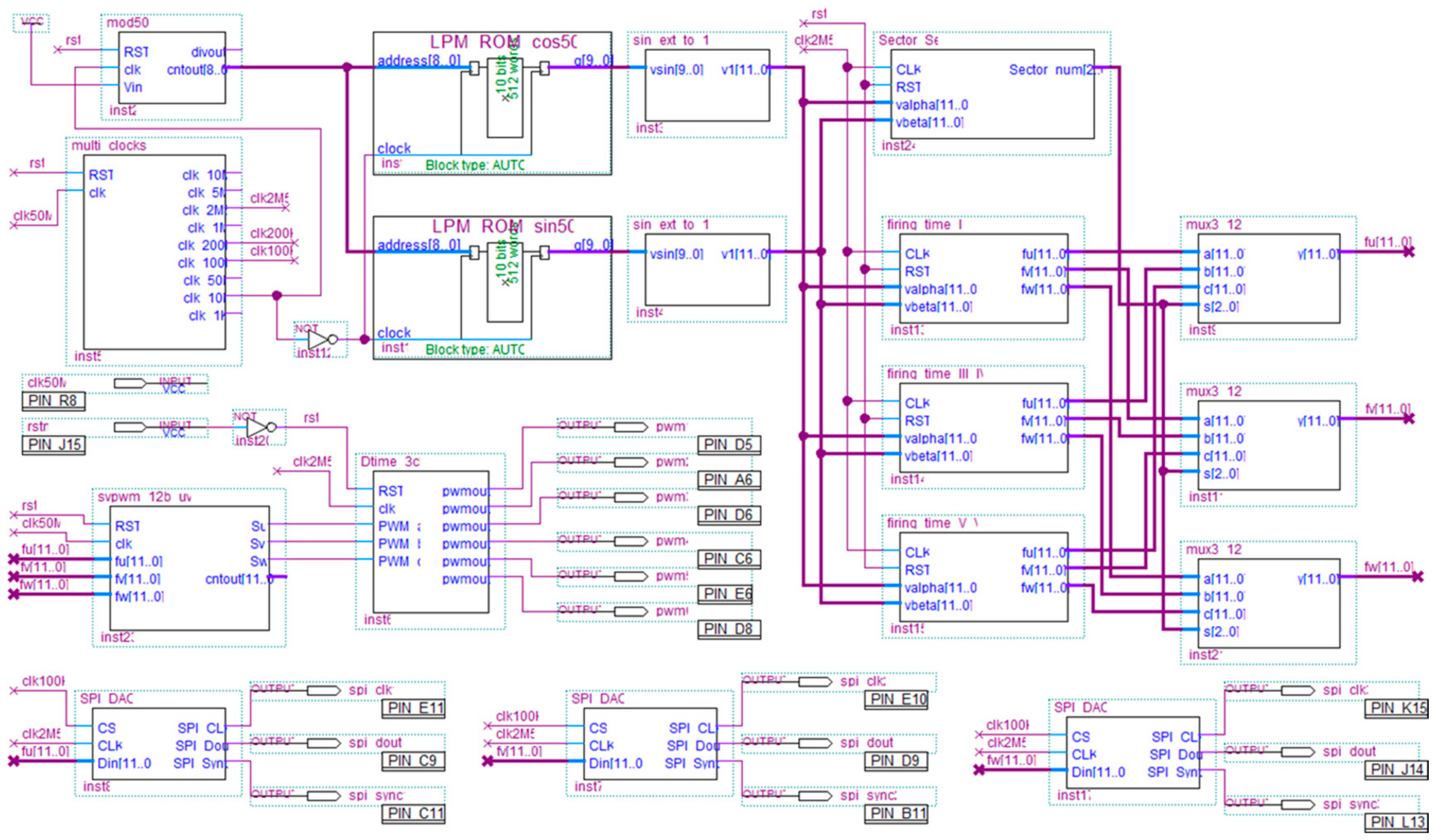
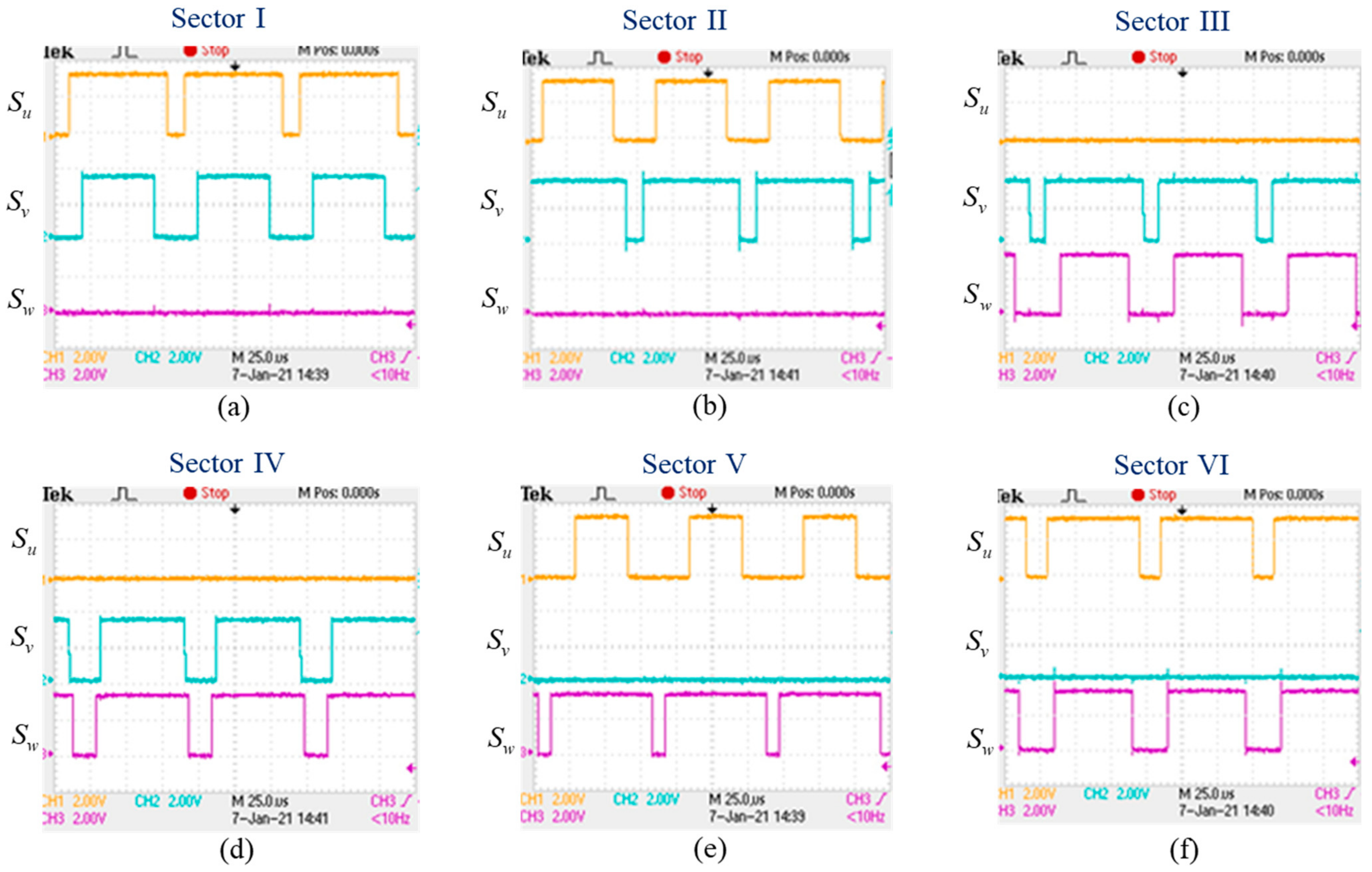
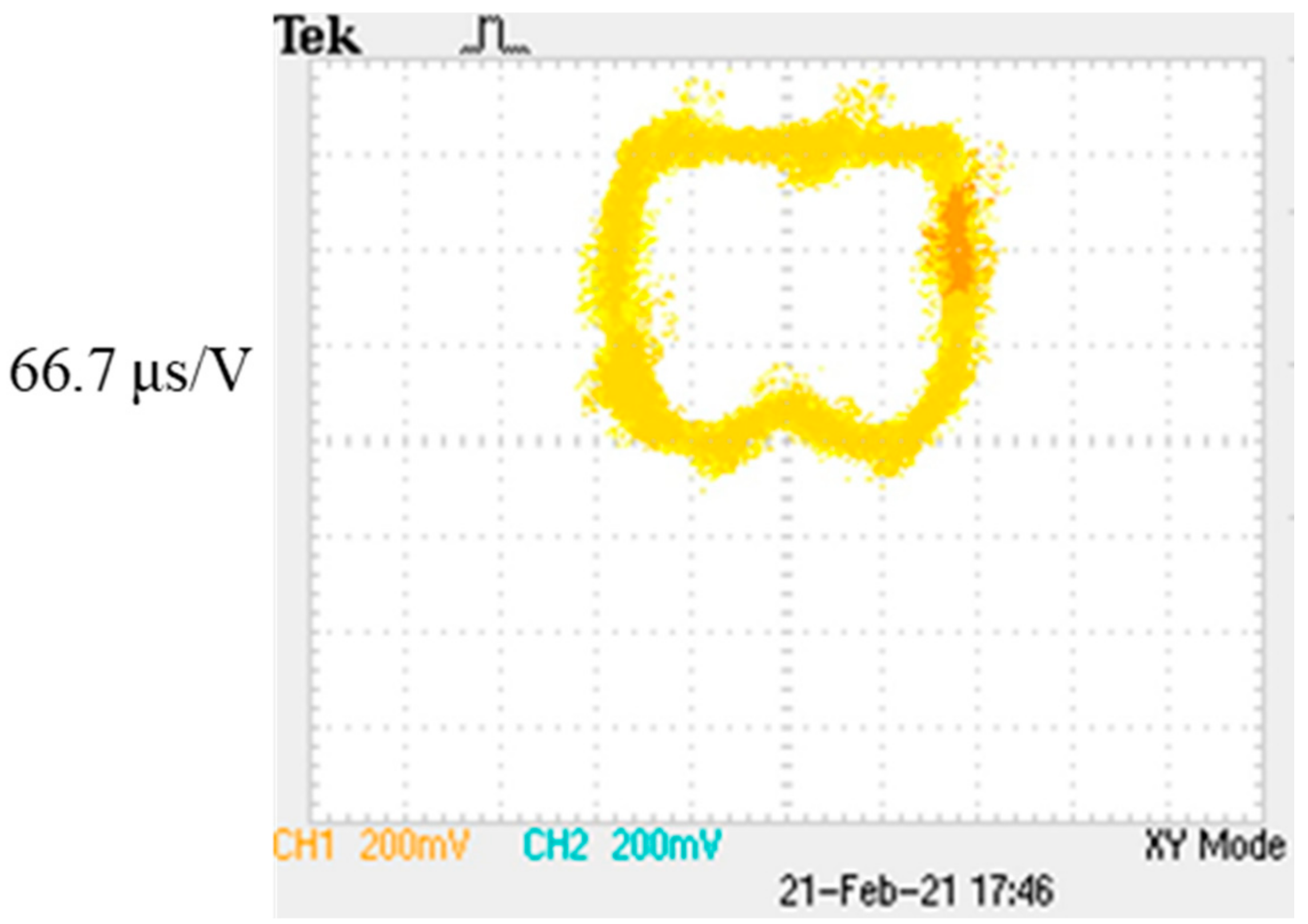
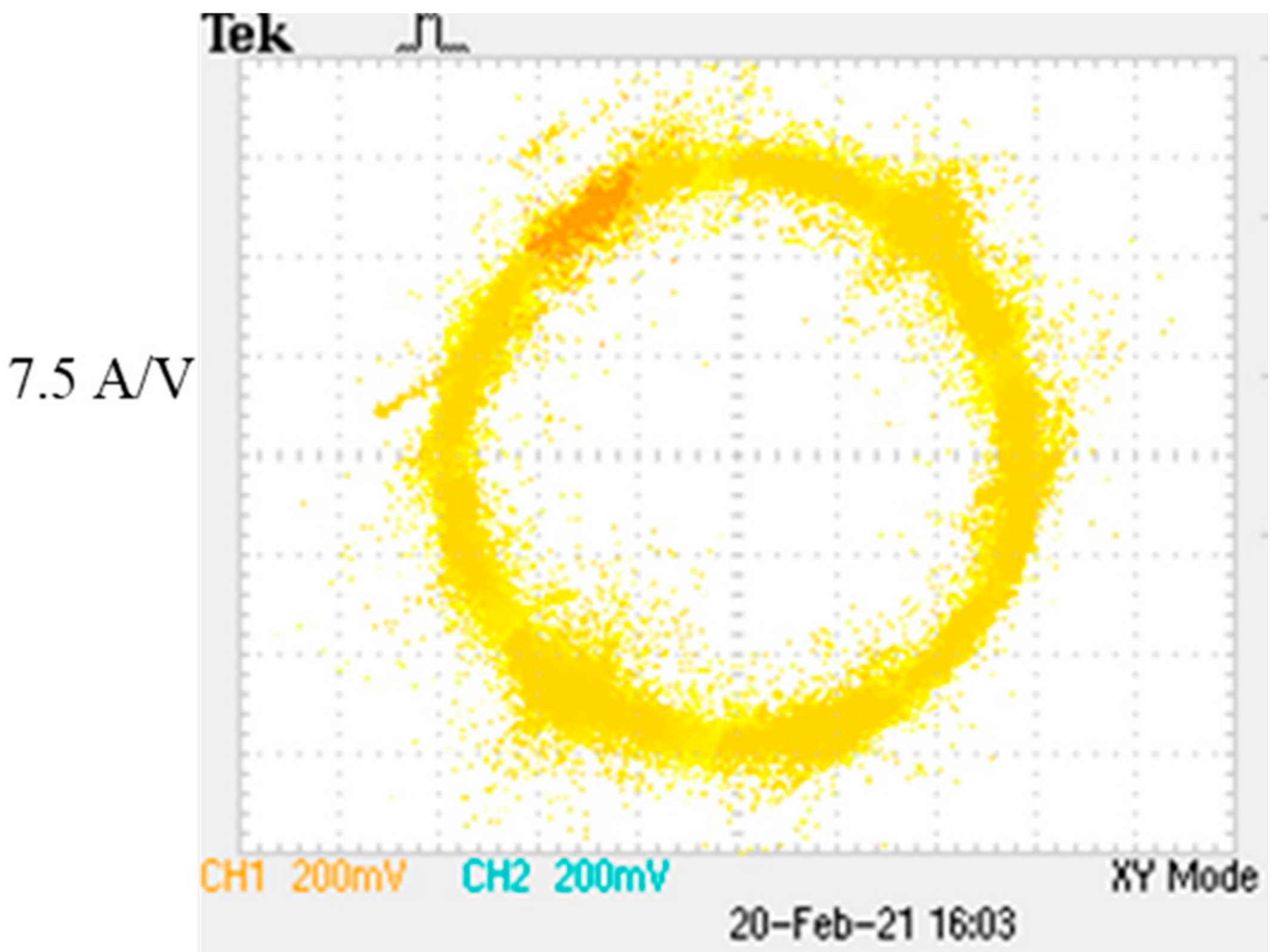
4. FPGA Implementation
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Abouzeid, A.F.; Guerrero, J.M.; Endemaño, A.; Muniategui, I.; Ortega, D.; Larrazabal, I.; Briz, F. Control strategies for induction motors in railway traction applications. Energies 2020, 13, 700. [Google Scholar] [CrossRef] [Green Version]
- Sieklucki, G. An Investigation into the Induction Motor of Tesla Model S Vehicle. In Proceedings of the IEEE 2018 International Symposium on Electrical Machines (SME 2018), Miyazaki, Japan, 10–13 June 2018. [Google Scholar]
- Liu, T.-H.; Ahmad, S.; Mubarok, M.S.; Chen, J.-Y. Simulation and implementation of predictive speed controller and position observer for sensorless synchronous reluctance motors. Energies 2020, 13, 2712. [Google Scholar] [CrossRef]
- Lin, C.-H. Permanent-magnet synchronous motor drive system using backstepping control with three adaptive rules and revised recurring sieved pollaczek polynomials neural network with reformed grey wolf optimization and recouped controller. Energies 2020, 13, 5870. [Google Scholar] [CrossRef]
- Ferdiansyah, I.; Rusli, M.R.; Praharsena, B.; Toar, H.; Ridwan; Purwanto, E. Speed Control of Three Phase Induction Motor Using Indirect Field Oriented Control Based on Real-Time Control System. In Proceedings of the IEEE 2018 10th International Conference on Information Technology and Electrical Engineering (ICITEE 2018), Bali, Indonesia, 24–26 July 2018. [Google Scholar]
- Rosa, F.C.; Bim, E. A constrained non-linear model predictive controller for the rotor flux-oriented control of an induction motor drive. Energies 2020, 13, 3899. [Google Scholar] [CrossRef]
- Alonge, F.; Cirrincione, M.; D’Ippolito, F.; Pucci, M.; Sferlazza, A. Robust active disturbance rejection control of induction motor systems based on additional sliding mode component. IEEE Trans. Ind. Electron. 2017, 64, 5608–5621. [Google Scholar] [CrossRef]
- De Santana, E.S.; Bim, E.; do Amaral, W.C. A predictive algorithm for controlling speed and rotor flux of induction motor. IEEE Trans. Ind. Electron. 2008, 55, 4398–4407. [Google Scholar] [CrossRef]
- Rosa, F.C.; Lima, F.; Fumagalli, M.A.; Bim, E. Evolving fuzzy controller applied in indirect field oriented control of induction motor. In Proceedings of the 2016 IEEE International Conference on Industrial Technology, Taipei, Taiwan, 14–17 March 2016; pp. 1452–1457. [Google Scholar]
- Merabet, A.; Ouhrouche, M.; Bui, R.T. Nonlinear predictive control with disturbance observer for induction motor drive. In Proceedings of the 2006 IEEE International Symposium on Industrial Electronics, Montreal, QC, Canada, 9–13 July 2006; Volume 1, pp. 86–91. [Google Scholar]
- Tsai, M.-F.; Tseng, C.-S.; Lin, B.-Y. Phase voltage-oriented control of a PMSG wind generator for unity power factor correction. Energies 2020, 13, 5693. [Google Scholar] [CrossRef]
- Raghuwanshi, S.S.; Khare, V.; Gupta, K. Analysis of SPWM VSI fed AC drive using different modulation index. In Proceedings of the International Conference on Information, Communication, Instrumentation and Control (ICICIC), Indore, India, 17–19 August 2017. [Google Scholar]
- Hazari, M.R.; Effat Jahan, E.; Mannan, M.A.; Tamura, J. Artificial neural network based speed control of an SPWM-VSI fed induction motor with considering core loss and stray load losses. In Proceedings of the IEEE International Conference on Electrical Machines and Systems (ICEMS), Chiba, Japan, 13–16 November 2016. [Google Scholar]
- Szabo, C.; Szoke, E.; Szekely, N.C.; Zacharias, V.; Imecs, M. Analysis of current-feedback PWM procedures based on hysteresis and current-carrier-wave control for VSI-fed induction motor drive. In Proceedings of the International Aegean Conference on Electrical Machines and Power Electronics (ACEMP) & International Conference on Optimization of Electrical and Electronic Equipment (OPTIM), Istanbul, Turkey, 27–29 August 2019. [Google Scholar]
- Harikrishnan, R.; Ashni, E.G. Direct torque control of PMSM using hysteresis modulation, PWM and DTC PWM based on PI control for EV—A comparative analysis between the three strategies. In Proceedings of the IEEE International Conference on Intelligent Computing, Instrumentation and Control Technologies (ICICICT), Kerala, India, 5–6 July 2019. [Google Scholar]
- Tzou, Y.-Y.; Hsu, H.-J.; Kuo, T.-S. FPGA-based SVPWM control IC for 3-phase PWM inverters. In Proceedings of the 22nd International Conference on Industrial Electronics, Control, and Instrumentation (IECON 1996), Taipei, Taiwan, 9 August 1996; pp. 138–143. [Google Scholar]
- Tzou, Y.-Y.; Hsu, H.-J. FPGA realization of space-vector PWM control IC for three-phase PWM inverters. IEEE Trans. Power Electron. 1997, 12, 953–963. [Google Scholar] [CrossRef]
- Bowes, S.R.; Lai, Y.-S. The relationship between space-vector modulation and regular-sampled PWM. IEEE Trans. Ind. Electron. 1997, 44, 670–679. [Google Scholar] [CrossRef]
- Tzou, Y.-Y.; Lin, S.-Y. Fuzzy-tuning current-vector control of a three-phase PWM inverter for high-performance AC drives. IEEE Trans. Ind. Electron. 1998, 45, 782–791. [Google Scholar] [CrossRef]
- Hava, A.M.; Kerkman, R.J.; Lipo, T.A. Simple analytical and graphical methods for carrier-based PWM-VSI drives. IEEE Trans. Power Electron. 1999, 14, 49–61. [Google Scholar] [CrossRef]
- Trzynadlowski, A.M.; Bech, M.M.; Blaabjerg, F.; Pedersen, J.K. An integral space-vector PWM technique for DSP-controlled voltage-source inverters. IEEE Trans. Ind. Appl. 1999, 35, 1091–1097. [Google Scholar] [CrossRef]
- Henriksen, S.; Betz, R.; Cook, B. Digital hardware implementation of a current controller for IM variable-speed drives. IEEE Trans. Ind. Appl. 1999, 35, 1021–1029. [Google Scholar] [CrossRef]
- Marwali, M.N.; Keyhani, A.; Tjanaka, W. Implementation of indirect vector control on an integrated digital signal processor-based system. IEEE Trans. Energy Convers. 1999, 14, 139–146. [Google Scholar] [CrossRef]
- Ma, J.D.; Bin, W.; Zargari, N.R.; Rizzo, S.C. A space vector modulated CSI-based AC drive for multi motor applications. IEEE Trans. Power Electron. 2001, 16, 535–544. [Google Scholar] [CrossRef]
- Tsai, M.-F.; Chen, H.-C. Design and implementation of a CPLD-based SVPWM ASIC for variable-speed control of AC motor drive. In Proceedings of the IEEE International Conference on Power Electronics and Drive Systems (PEDS), Denpasar, Indonesia, 21–25 October 2001. [Google Scholar]
- Zhou, K.; Wang, D. Relationship between space-vector modulation and three-phase carrier-based PWM: A comprehensive analysis [three-phase inverters]. IEEE Trans. Ind. Electron. 2002, 49, 186–196. [Google Scholar] [CrossRef]
- Attaianese, C.I.R.O.; Nardi, V.I.T.O.; Tomasso, G. A Novel SVM Strategy for VSI Dead-Time-Effect Reduction. IEEE Trans. Ind. Appl. 2005, 41, 1667–1674. [Google Scholar] [CrossRef]
- Zhang, W.-F.; Yu, Y.-H. Comparison of three SVPWM strategies. J. Electron. Sci. Technol. China 2007, 5, 283–287. [Google Scholar]
- Li, Y.W.; Wu, B.; Xu, D.; Zargari, N. Space Vector Sequence Investigation and Synchronization Methods for Active Front-End Rectifiers in High-Power Current-Source Drives. IEEE Trans. Ind. Electron. 2008, 55, 1022–1034. [Google Scholar] [CrossRef]
- Tonelli, M.; Battaiotto, P.; Valla, M.I. FPGA implementation of a universal space vector modulator. In Proceedings of the 27th Annual conference of the IEEE Industrial Electronics Society, Denver, CO, USA, 29 Novenber–2 December 2001; pp. 1172–1177. [Google Scholar]
- Gaballah, M.M. Design and Implementation of Space Vector PWM Inverter Based on a Low Cost Microcontroller. Arab. J. Sci. Eng. 2012, 38, 3059–3070. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, W.; Ali, S.M.U. Comparative study of SVPWM (space vector pulse width modulation) & SPWM (sinusoidal pulse width modulation) based three phase voltage source inverters for variable speed drive. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2013; Volume 51, p. 012027. [Google Scholar]
- Avinash Mishra, A.; Save, S.; Sen, R. Space vector pulse width modulation. Int. J. Sci. Eng. Res. 2014, 5, 2. [Google Scholar]
- Fan, Y.; Zhang, L.; Cheng, M.; Chau, K.T. Sensorless SVPWM-FADTC of a New Flux-Modulated Permanent-Magnet Wheel Motor Based on a Wide-Speed Sliding Mode Observer. IEEE Trans. Ind. Electron. 2015, 62, 3143–3151. [Google Scholar] [CrossRef] [Green Version]
- Liu, G.; Qu, L.; Zhao, W.; Chen, Q.; Xie, Y. Comparison of two SVPWM control strategies of five-phase fault-tolerant permanent-magnet motor. IEEE Trans. Power Electron. 2016, 31, 6621–6630. [Google Scholar] [CrossRef]
- Attique, Q.; Li, Y.; Wang, K. A survey on space-vector pulse width modulation for multilevel inverters. Cpss Trans. Power Electron. Appl. 2017, 2, 226–236. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, L.; Chang, W. Speed sensorless vector control of cascaded H-bridge inverter drive PMSM based on MRAS and two-level SVPWM. In Proceedings of the 21st International Conference on Electrical Machines and Systems (ICEMS), Jeju, Korea, 7–10 October 2018. [Google Scholar]
- De, S.K.; Baishya, P.; Chatterjee, S. Speed sensor-less rotor flux oriented control of a 3-phase induction motor drive using SVPWM. In Proceedings of the IEEE International Conference on Intelligent Computing, Information and Control Systems (ICICCS 2019), Secunderabad, India, 27–28 June 2019. [Google Scholar]
- Inan, R.; Demir, R. Improved speed-sensorless input/output linearisation-based SVPWM-DTC of IM. In Proceedings of the IEEE 1st Global Power, Energy and Communication Conference (GPECOM2019), Cappadocia, Turkey, 12–15 June 2019. [Google Scholar]
- Ketenci, G.; Karabacak, M. Comparative performance assessment of hysteresis and constant switching frequency DTC over AC machines. In Proceedings of the 2nd Global Power, Energy and Communication Conference (IEEE GPECOM 2020), Ephesus Izmir, Turkey, 20–23 October 2020. [Google Scholar]
- Tzou, Y.-Y.; Tsai, M.-F.; Lin, Y.-F.; Wu, H. Dual DSP based fully digital control of an AC induction motor. In Proceedings of the IEEE International Symposium on Industrial Electronics, Warsaw, Poland, 17–20 June 1996; pp. 673–678. [Google Scholar]
- Tzou, Y.-Y.; Lee, W.-A.; Lin, S.-Y. Dual-DSP sensorless speed control of an induction motor with adaptive voltage compensation. In Proceedings of the 27th Annual IEEE Power Electronics Specialists Conference, Baveno, Italy, 23–27 June 1996; pp. 351–357. [Google Scholar]
- Chen, C.; Yu, H.; Gong, F.; Wu, H. Induction motor adaptive back stepping control and efficiency optimization based on load observer. Energies 2020, 13, 3712. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
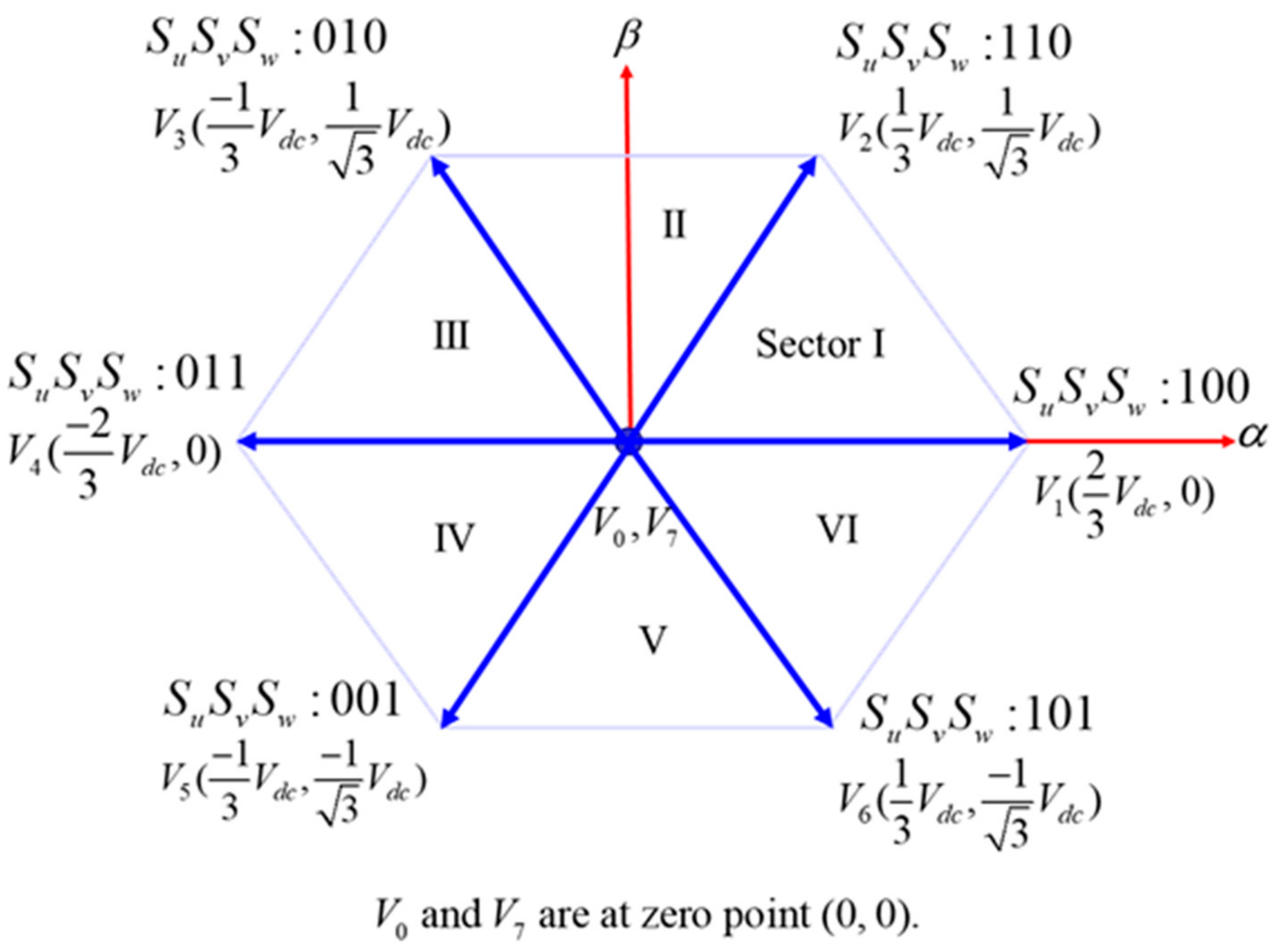
| Inverter Switch Status | Three-Phase Stator Voltages | Space Vectors |
|---|---|---|
| (1, 0, 0) | ||
| (0, 1, 0) | ||
| (1, 1, 0) | ||
| (0, 0, 1) | ||
| (1, 0, 1) | ||
| (0, 1, 1) | ||
| (1, 1, 1) | ||
| (0, 0, 0) |
| Sector | Sector Selection | T1 | T2 |
| I | |||
| II | |||
| III | |||
| IV | |||
| V | |||
| VI |
| Sector | fu | fv | fw |
| I, II | |||
| III, IV | |||
| V, VI |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsai, M.-F.; Tseng, C.-S.; Cheng, P.-J. Implementation of an FPGA-Based Current Control and SVPWM ASIC with Asymmetric Five-Segment Switching Scheme for AC Motor Drives. Energies 2021, 14, 1462. https://doi.org/10.3390/en14051462
Tsai M-F, Tseng C-S, Cheng P-J. Implementation of an FPGA-Based Current Control and SVPWM ASIC with Asymmetric Five-Segment Switching Scheme for AC Motor Drives. Energies. 2021; 14(5):1462. https://doi.org/10.3390/en14051462
Chicago/Turabian StyleTsai, Ming-Fa, Chung-Shi Tseng, and Po-Jen Cheng. 2021. "Implementation of an FPGA-Based Current Control and SVPWM ASIC with Asymmetric Five-Segment Switching Scheme for AC Motor Drives" Energies 14, no. 5: 1462. https://doi.org/10.3390/en14051462
APA StyleTsai, M. -F., Tseng, C. -S., & Cheng, P. -J. (2021). Implementation of an FPGA-Based Current Control and SVPWM ASIC with Asymmetric Five-Segment Switching Scheme for AC Motor Drives. Energies, 14(5), 1462. https://doi.org/10.3390/en14051462