
Innovative Application of Model-Based Predictive Control for Low-Voltage Power Distribution Grids with Significant Distributed Generation †



Abstract
:1. Introduction
2. Materials and Methods
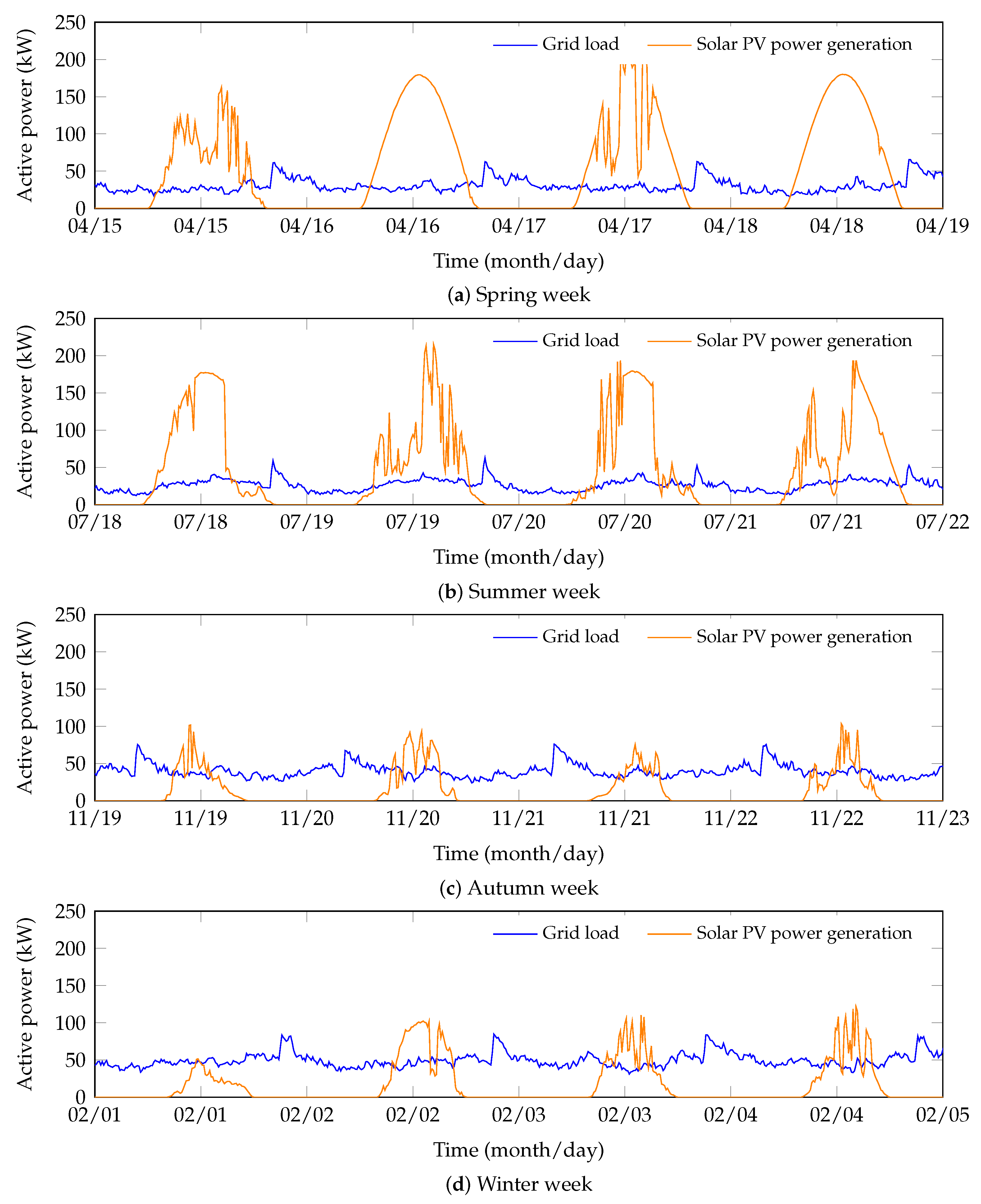
2.1. Case Study
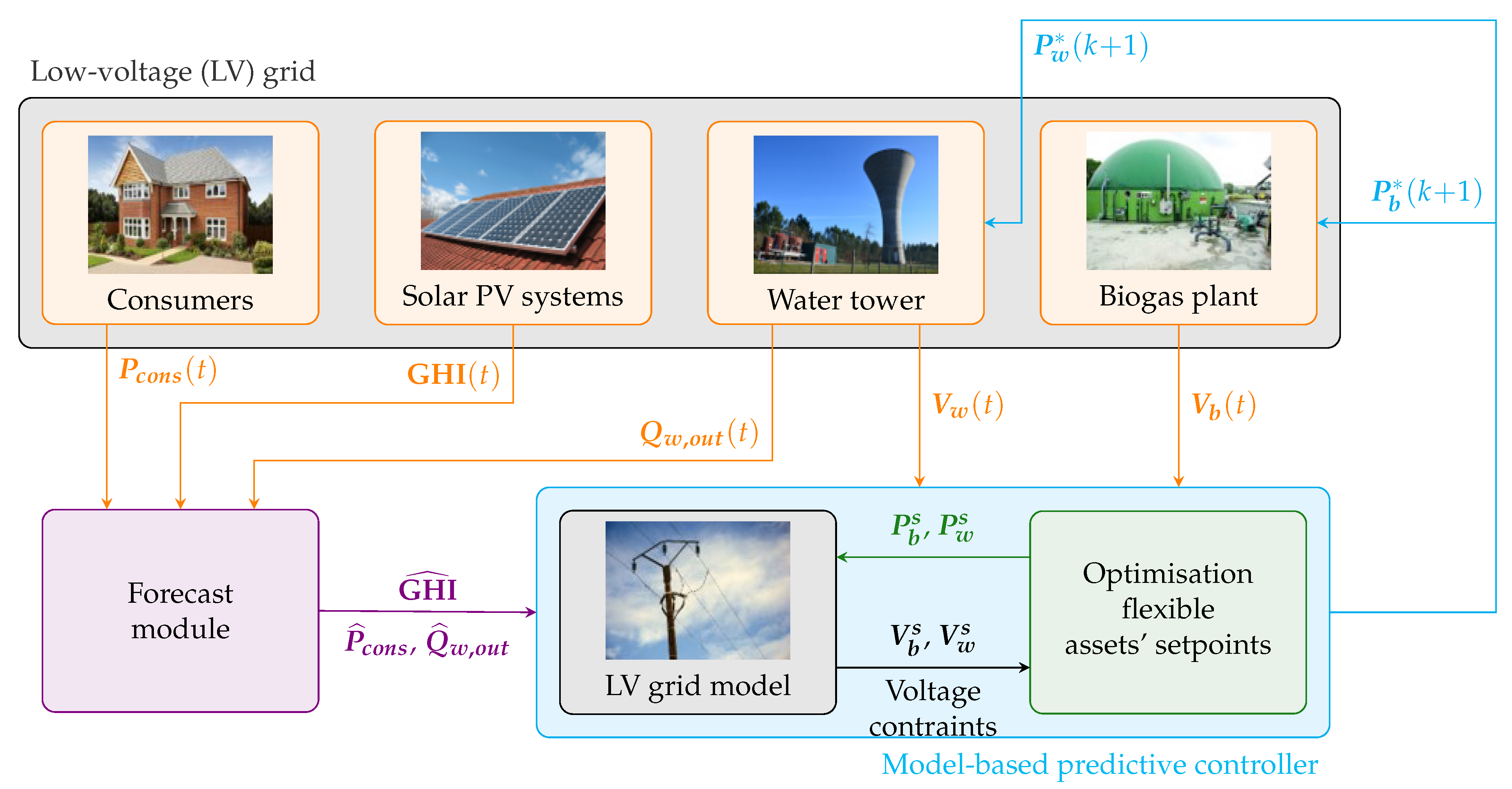
2.2. Overview of the Proposed Control Strategy
2.3. Models
2.4. Biogas Plant
2.5. Water Tower
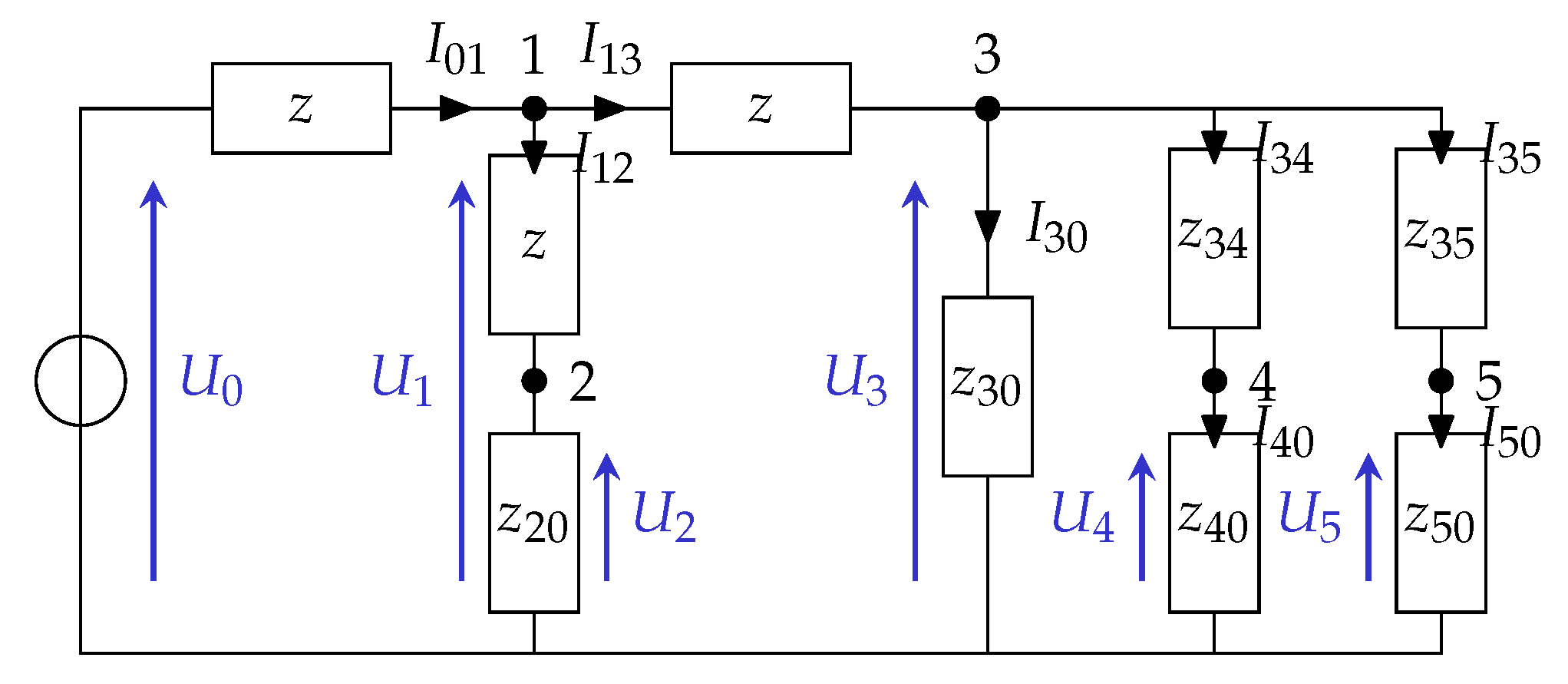
2.6. Low-Voltage Power Distribution Grid Model
3. Control Strategy
3.1. MINLP Formulation
- Water tower setpoint constraint
- Linear inequality constraints,
- Nonlinear equality constraints
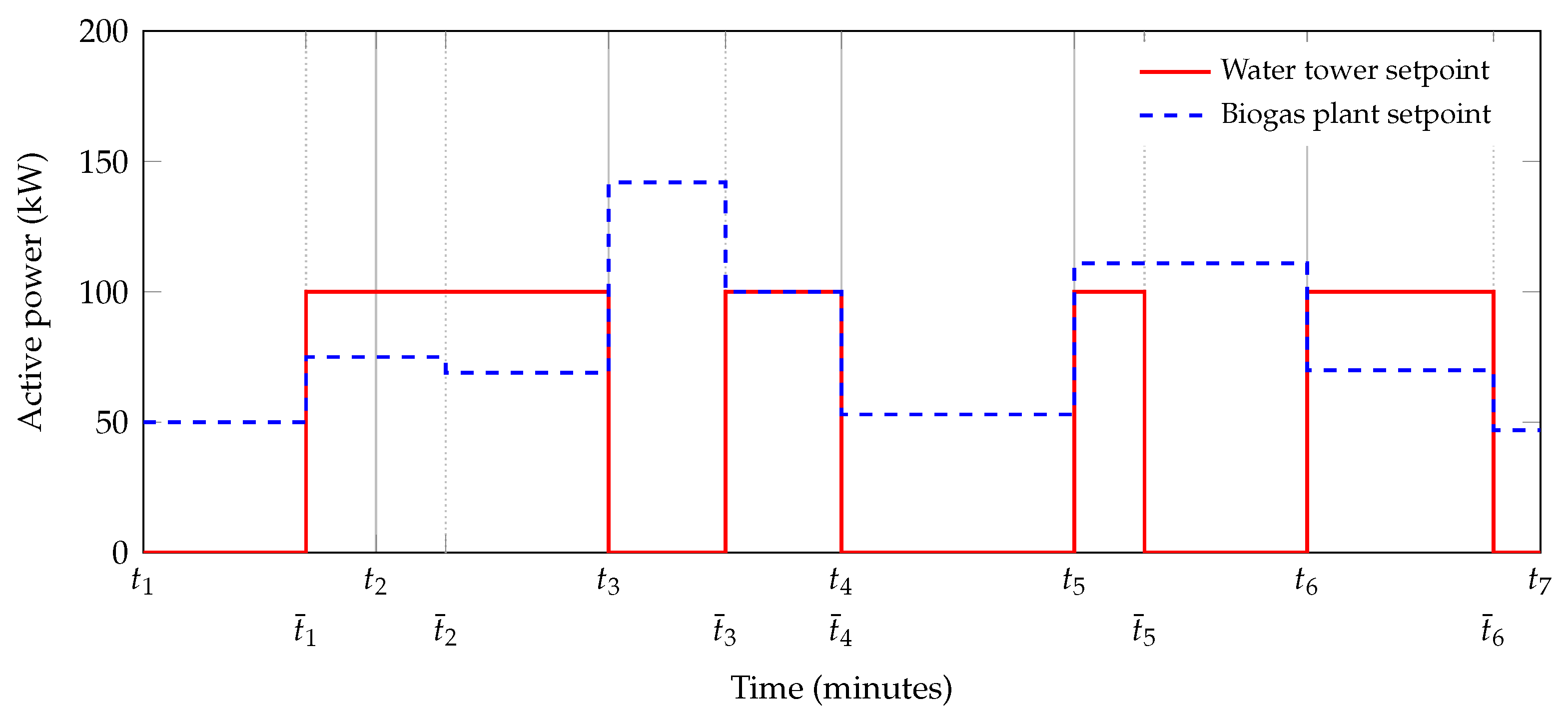
3.2. Switch Control
- Biogas plant power boundsand
- Switch time bounds
- Biogas volume constraints
- Water volume constraints
- Voltage constraints
3.2.1. Post-Treatment
3.2.2. Additional Constraints
- Constraints inferred by bounds of : from Equation (51), it is trivial that . As a result, is redundant. As for the lower bounds, using Equation (51):Since , . Then:
- Constraints inferred by bounds of : analogously to the constraints inferred by , and by using Equation (53), it can be easily demonstrated that is redundant. As a result:
3.3. Reference Strategies
3.3.1. Weekly Planning
3.3.2. Relaxed MPC Scheme
4. Results and Analysis
4.1. Weekly Planning Performance
4.2. Sensitivity Analysis
4.3. Switch Control Performance
5. Conclusions and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DG | Distributed generation |
| GHI | Global horizontal irradiance |
| MINLP | Mixed-integer nonlinear programming |
| MPC | Model-based predictive control |
| LV | Low voltage |
| MV | Medium voltage |
| PV | Solar photovoltaics |
Appendix A. Post-Treatment Algorithm
- is the stored biogas volume in the biogas plant’s storage unit at the end of the current time step if the pulse is eliminated, i.e., if in case the pump is not turned on in the current time step.with:
- is the stored biogas volume in the biogas plant’s storage unit at switching time of the current time step if the duration of the pulse is extended to equal the pre-defined threshold, i.e., if .
- is the stored biogas volume in the biogas plant’s storage unit at the end of the current time step if the duration of the pulse is extended to equal the pre-defined threshold, i.e., if .
- is the stored biogas volume in the biogas plant’s storage unit at the end of the current time step if the pulse is extended, i.e., if the pump is turned on during the entire time step.
- is the stored biogas volume in the biogas plant’s storage unit at switching time of the current time step if the duration of the pulse could not be extended and is shortened to .
- is the stored biogas volume in the biogas plant’s storage unit at the end of the current time step if the duration of the pulse could not be extended and is shortened to .
- is the stored water volume in the water tower’s tank at the end of the current time step if the pulse is eliminated, i.e., in the case the pump is not turned on in the current time step.
- is the stored water volume in the water tower’s tank at switching time of the current time step if the duration of the pulse is extended to equal the pre-defined threshold, i.e., if .with:
- is the stored water volume in the water tower’s tank at the end of the current time step if the duration of the pulse is extended to equal the pre-defined threshold, i.e., if .
- is the stored water volume in the water tower’s tank at the end of the current time step if the pulse is extended, i.e., if the pump is turned on during the entire time step.
- is the stored water volume in the water tower’s tank at switching time of the current time step if the duration of the pulse could not be extended and is shortened to .
- is the stored water volume in the water tower’s tank at the end of the current time step if the duration of the pulse could not be extended and is shortened to .
| Algorithm A1: Post-Treatment Algorithm 1, Part 1. |
 |
| Algorithm A2: Post-Treatment Algorithm 1, Part 2. |
 |
| Algorithm A3: Post-Treatment Algorithm 2. |
 |
References
- Pepermans, G.; Driesen, J.; Haeseldonckx, D.; Belmans, R.; D’haeseleer, W. Distributed generation: Definition, benefits and issues. Energy Policy 2005, 33, 787–798. [Google Scholar] [CrossRef]
- ENEDIS. Principes D’étude et de Développement du Réseau pour le Raccordement des Clients Consommateurs et Producteurs BT; Enedis-PRO-RES_43E; Technical Report; Direction Technique ENEDIS: Paris La Défense, France, 2019. [Google Scholar]
- Haupt, S.E.; Copeland, J.; Cheng, W.Y.; Zhang, Y.; Ammann, C.; Sullivan, P. A method to assess the wind and solar resource and to quantify interannual variability over the United States under current and projected future climate. J. Appl. Meteorol. Climatol. 2016, 55, 345–363. [Google Scholar] [CrossRef]
- Pérez-Arriaga, I.J. Regulation of the Power Sector; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Barker, P.P.; De Mello, R.W. Determining the impact of distributed generation on power systems. I. Radial distribution systems. IEEE Power Eng. Soc. Summer Meet. 2000, 3, 1645–1656. [Google Scholar]
- Peças Lopes, J.a.A.; Hatziargyriou, N.; Mutale, J.; Djapic, P.; Jenkins, N.P. Integrating distributed generation into electric power systems: A review of drivers, challenges and opportunities. Electr. Power Syst. Res. 2007, 77, 1189–1203. [Google Scholar] [CrossRef] [Green Version]
- Coster, E.J.; Myrzik, J.M.A.; Kruimer, B.; Kling, W.L. Integration issues of distributed generation in distribution grids. Proc. IEEE 2010, 99, 28–39. [Google Scholar] [CrossRef] [Green Version]
- Swan, L.G.; Ugursal, V.I. Modeling of end-use energy consumption in the residential sector: A review of modeling techniques. Renew. Sustain. Energy Rev. 2009, 13, 1819–1835. [Google Scholar] [CrossRef]
- Wan, C.; Zhao, J.; Song, Y.; Xu, Z.; Lin, J.; Hu, Z. Photovoltaic and solar power forecasting for smart grid energy management. CSEE J. Power Energy Syst. 2015, 1, 38–46. [Google Scholar] [CrossRef]
- Abdi, H.; Beigvand, S.D.; La Scala, M. A review of optimal power flow studies applied to smart grids and microgrids. Renew. Sustain. Energy Rev. 2017, 71, 742–766. [Google Scholar] [CrossRef]
- Syranidis, K.; Robinius, M.; Stolten, D. Control techniques and the modeling of electrical power flow across transmission networks. Renew. Sustain. Energy Rev. 2018, 82, 3452–3467. [Google Scholar] [CrossRef]
- De Oliveira-De Jesus, P.M.; Henggeler Antunes, C. A detailed network model for distribution systems with high penetration of renewable generation sources. Electr. Power Syst. Res. 2018, 161, 152–166. [Google Scholar] [CrossRef]
- Joshi, K.; Pindoriya, N. Advances in Distribution System Analysis with Distributed Resources: Survey with a Case Study. Sustain. Energy Grids Netw. 2018, 15, 86–100. [Google Scholar] [CrossRef]
- Frank, S.; Rebennack, S. An introduction to optimal power flow: Theory, formulation, and examples. IIE Trans. 2016, 48, 1172–1197. [Google Scholar] [CrossRef]
- Riffonneau, Y.; Bacha, S.; Barruel, F.; Ploix, S. Optimal Power Flow Management for Grid Connected PV Systems With Batteries. IEEE Trans. Sustain. Energy 2011, 2, 309–320. [Google Scholar] [CrossRef]
- Strbac, G. Demand side management: Benefits and challenges. Energy Policy 2008, 36, 4419–4426. [Google Scholar] [CrossRef]
- Palensky, P.; Dietrich, D. Demand side management: Demand response, intelligent energy systems, and smart loads. IEEE Trans. Ind. Inform. 2011, 7, 381–388. [Google Scholar] [CrossRef] [Green Version]
- Meyabadi, A.F.; Deihimi, M.H. A review of demand-side management: Reconsidering theoretical framework. Renew. Sustain. Energy Rev. 2017, 80, 367–379. [Google Scholar] [CrossRef]
- Balijepalli, V.M.; Pradhan, V.; Khaparde, S.A.; Shereef, R. Review of demand response under smart grid paradigm. In Proceedings of the ISGT2011-India, Kollam, India, 1–3 December 2011; pp. 236–243. [Google Scholar]
- Aghaei, J.; Alizadeh, M.I. Demand response in smart electricity grids equipped with renewable energy sources: A review. Renew. Sustain. Energy Rev. 2013, 18, 64–72. [Google Scholar] [CrossRef]
- Siano, P. Demand response and smart grids—A survey. Renew. Sustain. Energy Rev. 2014, 30, 461–478. [Google Scholar] [CrossRef]
- McArthur, S.D.J.; Davidson, E.M.; Catterson, V.M.; Dimeas, A.L.; Hatziargyriou, N.D.; Ponci, F.; Funabashi, T. Multi-Agent Systems for Power Engineering Applications—Part I: Concepts, Approaches, and Technical Challenges. IEEE Trans. Power Syst. 2007, 22, 1743–1752. [Google Scholar] [CrossRef] [Green Version]
- McArthur, S.D.J.; Davidson, E.M.; Catterson, V.M.; Dimeas, A.L.; Hatziargyriou, N.D.; Ponci, F.; Funabashi, T. Multi-Agent Systems for Power Engineering Applications—Part II: Technologies, Standards and Tools for Building Multi-Agent Systems. IEEE Trans. Power Syst. 2007, 22, 1753–1759. [Google Scholar] [CrossRef] [Green Version]
- Mocci, S.; Natale, N.; Pilo, F.; Ruggeri, S. Demand side integration in LV smart grids with multi-agent control system. Electr. Power Syst. Res. 2015, 125, 23–33. [Google Scholar] [CrossRef]
- You, S.; Segerberg, H. Integration of 100% micro-distributed energy resources in the low voltage distribution network: A Danish case study. Appl. Therm. Eng. 2014, 71, 797–808. [Google Scholar] [CrossRef]
- Haque, A.N.M.M.; Nguyen, P.H.; Vo, T.H.; Bliek, F.W. Agent-based unified approach for thermal and voltage constraint management in LV distribution network. Electr. Power Syst. Res. 2017, 143, 462–473. [Google Scholar] [CrossRef] [Green Version]
- Dkhili, N.; Eynard, J.; Thil, S.; Grieu, S. A survey of modelling and smart management tools for power grids with prolific distributed generation. Sustain. Energy Grids Netw. 2020, 21, 100284. [Google Scholar] [CrossRef]
- Pesaran, M.H.A.; Huy, P.D.; Ramachandaramurthy, V.K. A review of the optimal allocation of distributed generation: Objectives, constraints, methods, and algorithms. Renew. Sustain. Energy Rev. 2017, 75, 293–312. [Google Scholar] [CrossRef]
- Sugihara, H.; Yokoyama, K.; Saeki, O.; Tsuji, K.; Funaki, T. Economic and efficient voltage management using customer-owned energy storage systems in a distribution network with high penetration of photovoltaic systems. IEEE Trans. Power Syst. 2013, 28, 102–111. [Google Scholar] [CrossRef]
- Karimyan, P.; Gharehpetian, G.B.; Abedi, M.R.; Gavili, A. Long term scheduling for optimal allocation and sizing of DG unit considering load variations and DG type. Int. J. Electr. Power Energy Syst. 2014, 54, 277–287. [Google Scholar] [CrossRef]
- Bruni, G.; Cordiner, S.; Mulone, V.; Rocco, V.; Spagnolo, F. A study on the energy management in domestic micro-grids based on model predictive control strategies. Energy Convers. Manag. 2015, 102, 50–58. [Google Scholar] [CrossRef]
- Prodan, I.; Zio, E. A model predictive control framework for reliable microgrid energy management. Int. J. Electr. Power Energy Syst. 2014, 61, 399–409. [Google Scholar] [CrossRef]
- Vazquez, S.; Leon, J.I.; Franquelo, L.G.; Rodriguez, J.; Young, H.A.; Marquez, A.; Zanchetta, P. Model predictive control: A review of its applications in power electronics. IEEE Ind. Electron. Mag. 2014, 8, 16–31. [Google Scholar] [CrossRef]
- Tøndel, P.; Johansen, T.A. Complexity reduction in explicit linear model predictive control. IFAC Proc. Vol. 2002, 35, 189–194. [Google Scholar] [CrossRef] [Green Version]
- Dkhili, N.; Thil, S.; Eynard, J.; Grieu, S. A flexible asset operation strategy for demand/supply balance in electrical distribution grids. In Proceedings of the 2019 IEEE International Conference on Environment and Electrical Engineering and 2019 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Genova, Italy, 11–14 June 2019; pp. 1–6. [Google Scholar]
- Dkhili, N.; Thil, S.; Eynard, J.; Grieu, S. A model-based predictive control for power distribution grids with prolific distributed generation: A case study. In Proceedings of the 2020 IEEE International Conference on Environment and Electrical Engineering and 2020 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Madrid, Spain, 9–12 June 2020; pp. 1–6. [Google Scholar]
- Belotti, P.; Kirches, C.; Leyffer, S.; Linderoth, J.; Luedtke, J.; Mahajan, A. Mixed-integer nonlinear optimization. Acta Numer. 2013, 22, 1–131. [Google Scholar] [CrossRef] [Green Version]
- Burer, S.; Letchford, A.N. Non-convex mixed-integer nonlinear programming: A survey. Surv. Oper. Res. Manag. Sci. 2012, 17, 97–106. [Google Scholar] [CrossRef] [Green Version]
- Obaro, A.Z.; Munda, J.L.; Siti, M.W. Optimal Energy Management of an Autonomous Hybrid Energy System. In Proceedings of the 2018 IEEE 7th International Conference on Power and Energy (PECon), Kuala Lumpur, Malaysia, 3–4 December 2018; pp. 316–321. [Google Scholar] [CrossRef]
- Moretti, L.; Manzolini, G.; Martelli, E. MILP and MINLP models for the optimal scheduling of multi-energy systems accounting for delivery temperature of units, topology and non-isothermal mixing. Appl. Therm. Eng. 2021, 184, 116161. [Google Scholar] [CrossRef]
- Montoya, O.D.; Gil-González, W.; Grisales-Noreña, L. An exact MINLP model for optimal location and sizing of DGs in distribution networks: A general algebraic modeling system approach. Ain Shams Eng. J. 2020, 11, 409–418. [Google Scholar] [CrossRef]
- Kaur, S.; Kumbhar, G.; Sharma, J. A MINLP technique for optimal placement of multiple DG units in distribution systems. Int. J. Electr. Power Energy Syst. 2014, 63, 609–617. [Google Scholar] [CrossRef]
- Lee, J.; Leyffer, S. Mixed Integer Nonlinear Programming; Springer: New York, NY, USA, 2012. [Google Scholar]
- Sahinidis, N. Mixed-integer nonlinear programming 2018. Optim. Eng. 2019, 20, 301–306. [Google Scholar] [CrossRef] [Green Version]
- Trespalacios, F.; Grossmann, I. Review of mixed-integer nonlinear and generalized disjunctive programming methods. Chem. Ing. Tech. 2014, 86, 991–1012. [Google Scholar] [CrossRef]
- Nocedal, J.; Wright, S.J. Numerical Optimization; Springer: New York, NY, USA, 2006. [Google Scholar]
- Nowak, I. (Ed.) Relaxation and Decomposition Methods for Mixed Integer Nonlinear Programming; Birkhäuser: Basel, Switzerland, 2005. [Google Scholar]
- Tawarmalani, M.; Sahinidis, N.V.; Sahinidis, N. Convexification and Global Optimization in Continuous and Mixed-Integer Nonlinear Programming: Theory, Algorithms, Software, and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2002; Volume 65. [Google Scholar]
- Salas, D.; Tapachès, E.; Mazet, N.; Aussel, D. Economical optimization of thermochemical storage in concentrated solar power plants via pre-scenarios. Energy Convers. Manag. 2018, 174, 932–954. [Google Scholar] [CrossRef]
- Murty, V.V.S.N.; Kumar, A. Optimal placement of DG in radial distribution systems based on new voltage stability index under load growth. Int. J. Electr. Power Energy Syst. 2015, 69, 246–256. [Google Scholar] [CrossRef]
- Yammani, C.; Maheswarapu, S.; Matam, S. Multiobjective optimization for optimal placement and size of DG using shuffled frog leaping algorithm. Energy Procedia 2012, 14, 990–995. [Google Scholar] [CrossRef] [Green Version]
- Wright, M. The interior-point revolution in optimization: History, recent developments, and lasting consequences. Bull. Am. Math. Soc. 2005, 42, 39–56. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Season | Gain | ||
|---|---|---|---|
| Spring | 26.5% | ||
| Summer | 26.1% | ||
| Autumn | 41.5% | ||
| Winter | 46.9% |
| Season | Gain | ||
|---|---|---|---|
| Spring | 21.3% | ||
| Summer | 23.2% | ||
| Autumn | 33.5% | ||
| Winter | 38.4% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dkhili, N.; Salas, D.; Eynard, J.; Thil, S.; Grieu, S. Innovative Application of Model-Based Predictive Control for Low-Voltage Power Distribution Grids with Significant Distributed Generation. Energies 2021, 14, 1773. https://doi.org/10.3390/en14061773
Dkhili N, Salas D, Eynard J, Thil S, Grieu S. Innovative Application of Model-Based Predictive Control for Low-Voltage Power Distribution Grids with Significant Distributed Generation. Energies. 2021; 14(6):1773. https://doi.org/10.3390/en14061773
Chicago/Turabian StyleDkhili, Nouha, David Salas, Julien Eynard, Stéphane Thil, and Stéphane Grieu. 2021. "Innovative Application of Model-Based Predictive Control for Low-Voltage Power Distribution Grids with Significant Distributed Generation" Energies 14, no. 6: 1773. https://doi.org/10.3390/en14061773
APA StyleDkhili, N., Salas, D., Eynard, J., Thil, S., & Grieu, S. (2021). Innovative Application of Model-Based Predictive Control for Low-Voltage Power Distribution Grids with Significant Distributed Generation. Energies, 14(6), 1773. https://doi.org/10.3390/en14061773