
Adaptive Local Mean Decomposition and Multiscale-Fuzzy Entropy-Based Algorithms for the Detection of DC Series Arc Faults in PV Systems

 ,
,  , ,
, ,  ,
,
Abstract
:
1. Introduction
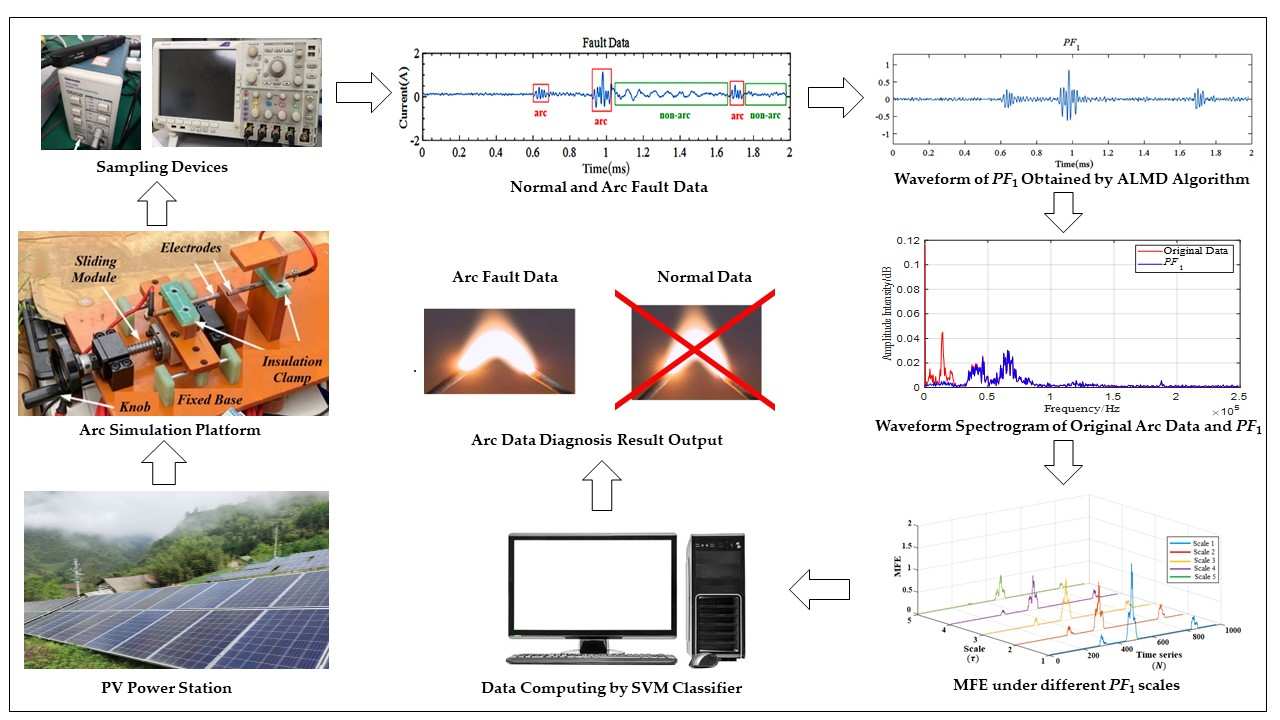
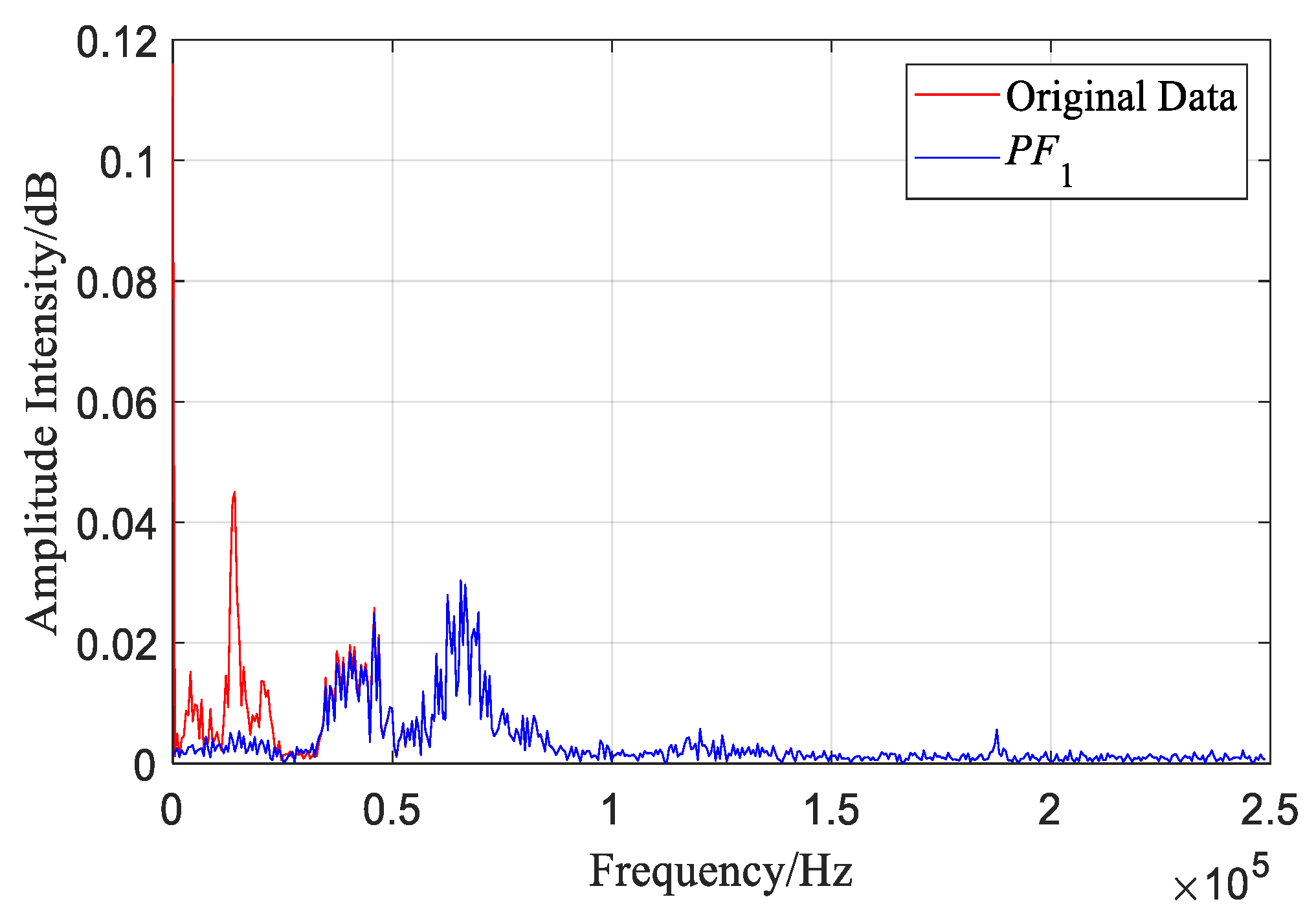
- The use of the ALMD algorithm to obtain the concerned components that best depict the arc characteristic frequency band information from the raw signal, which effectively eliminate the influences of the complex environment noise.
- The choice of the multiscale fuzzy entropy (MFE) of the concerned component as the arc detection feature, which makes the following SVM classifier algorithm perform extraordinarily well in complex nonlinear circumstances with complicated background noise.
2. Algorithm for Detecting Arc Faults
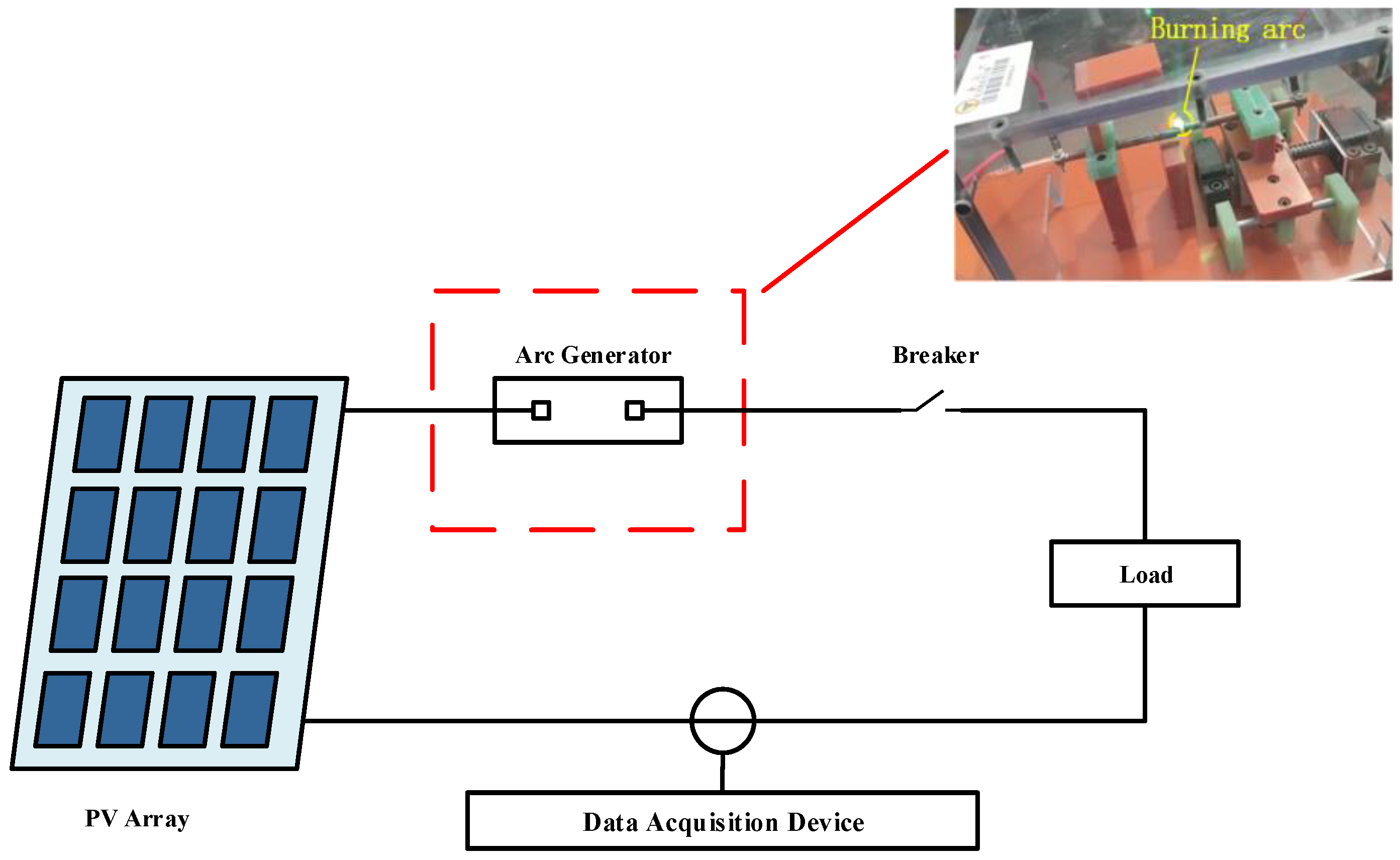
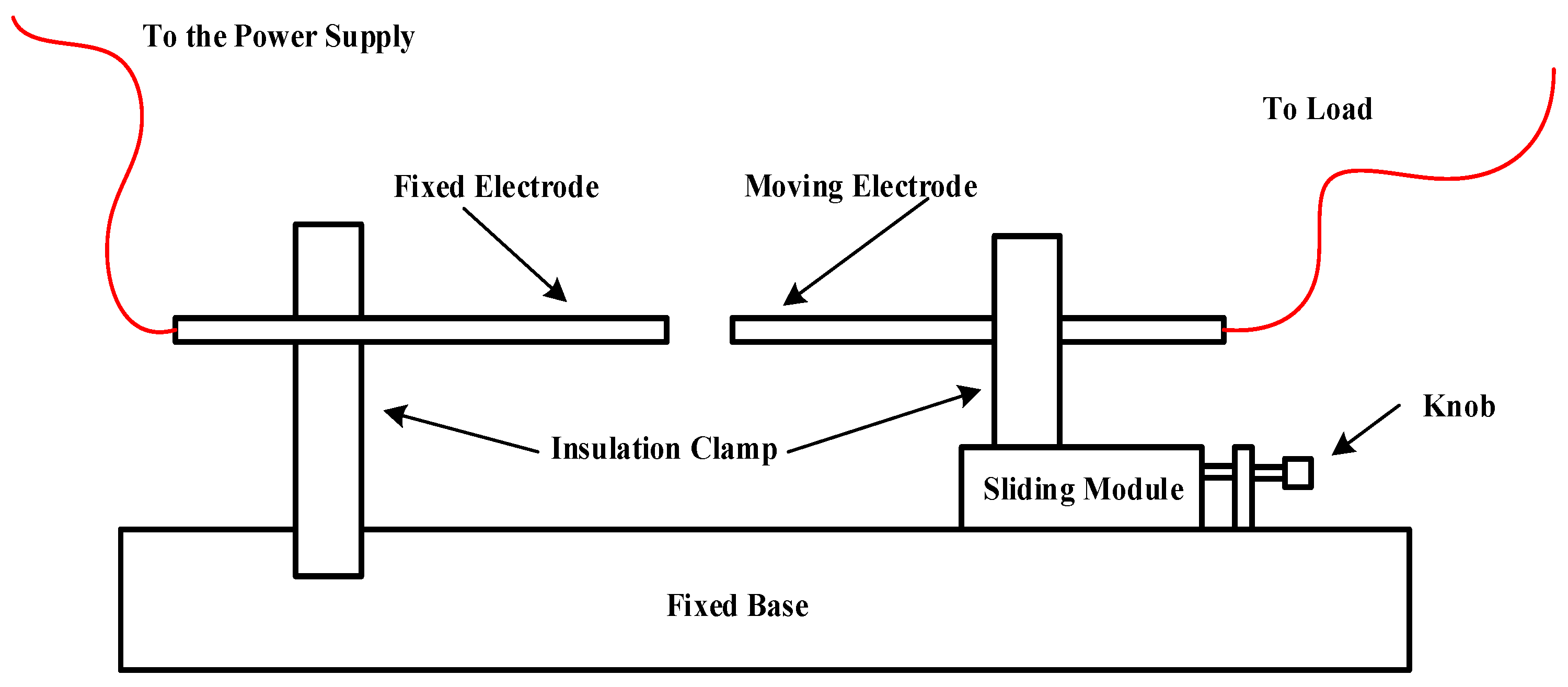
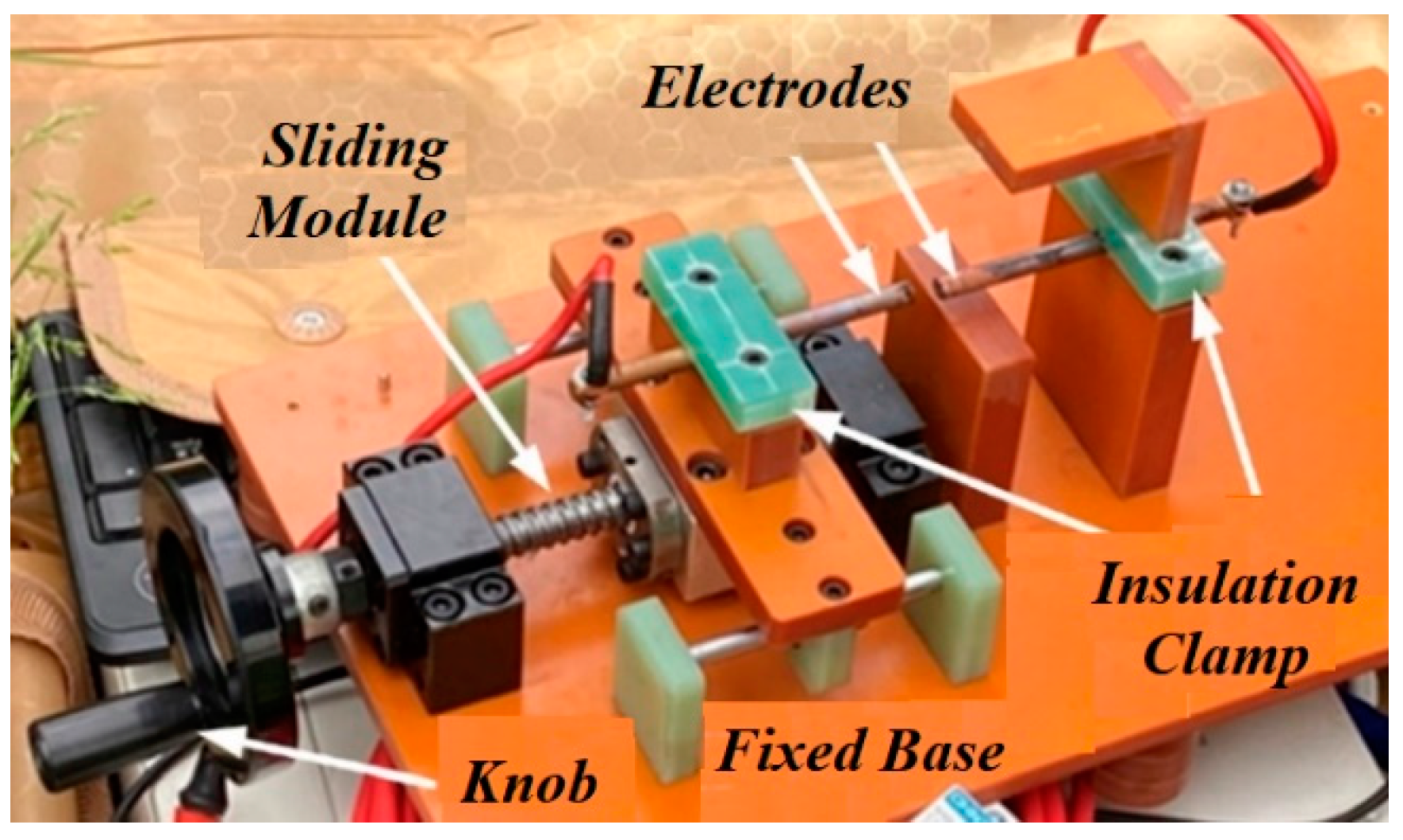
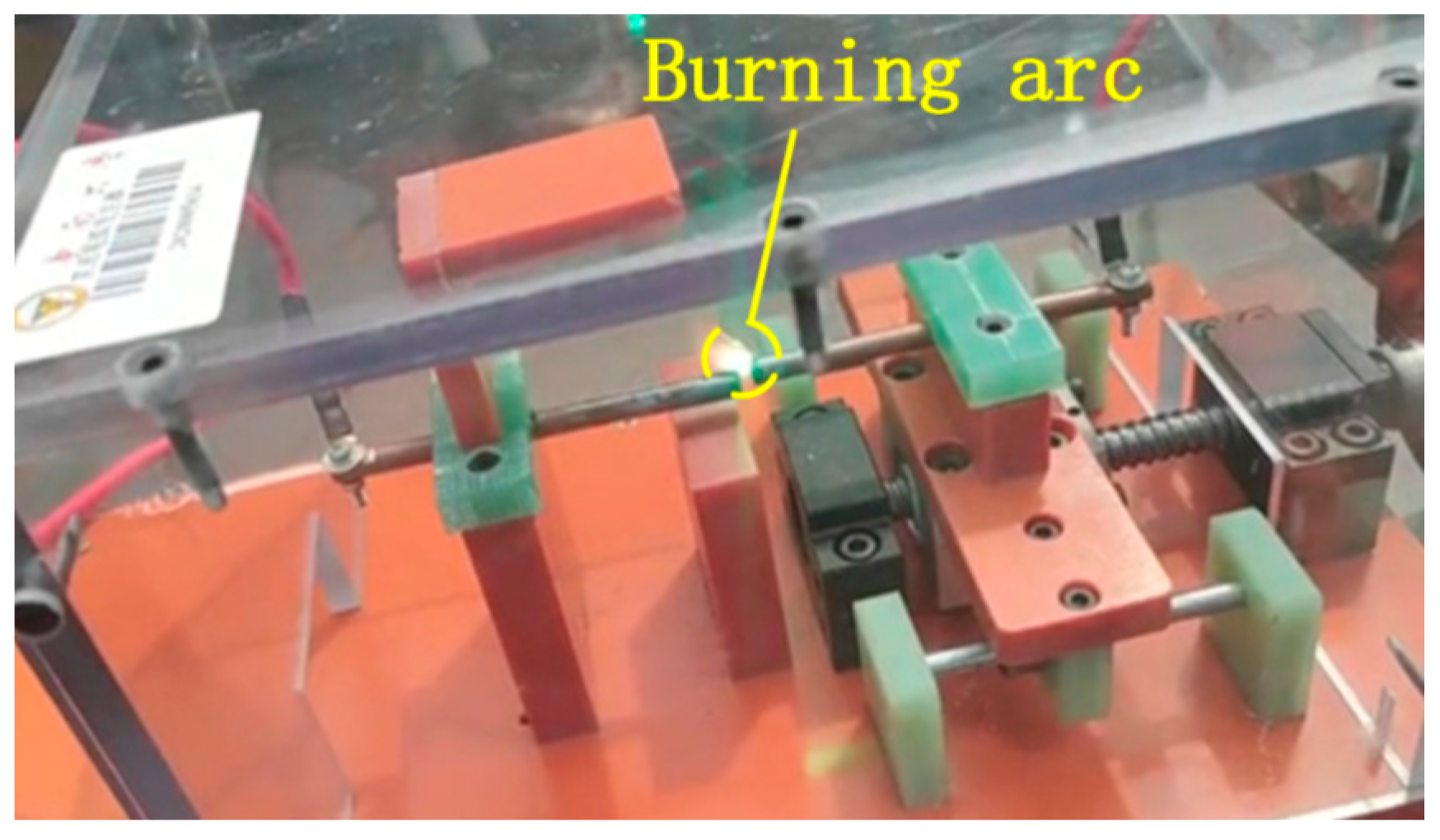
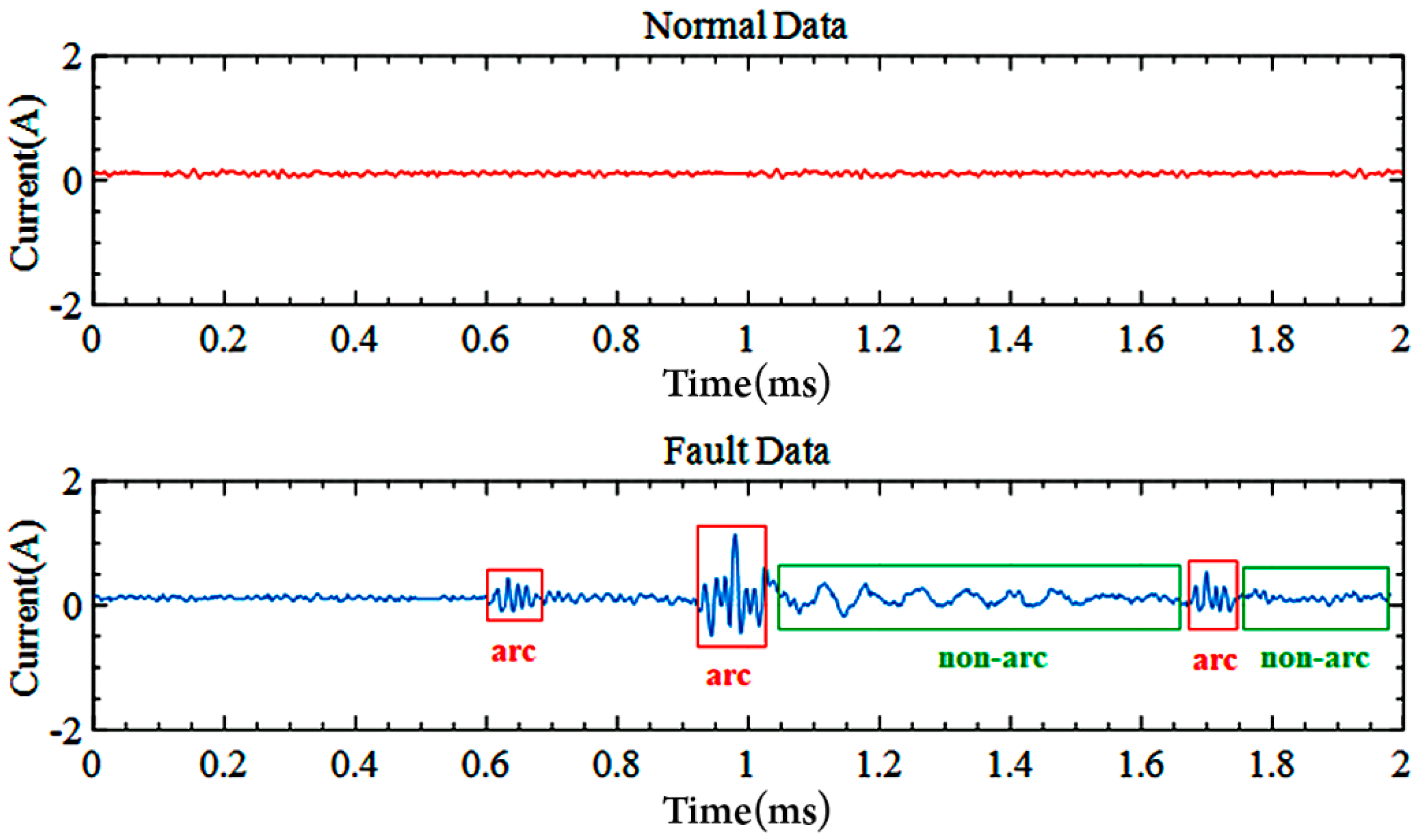
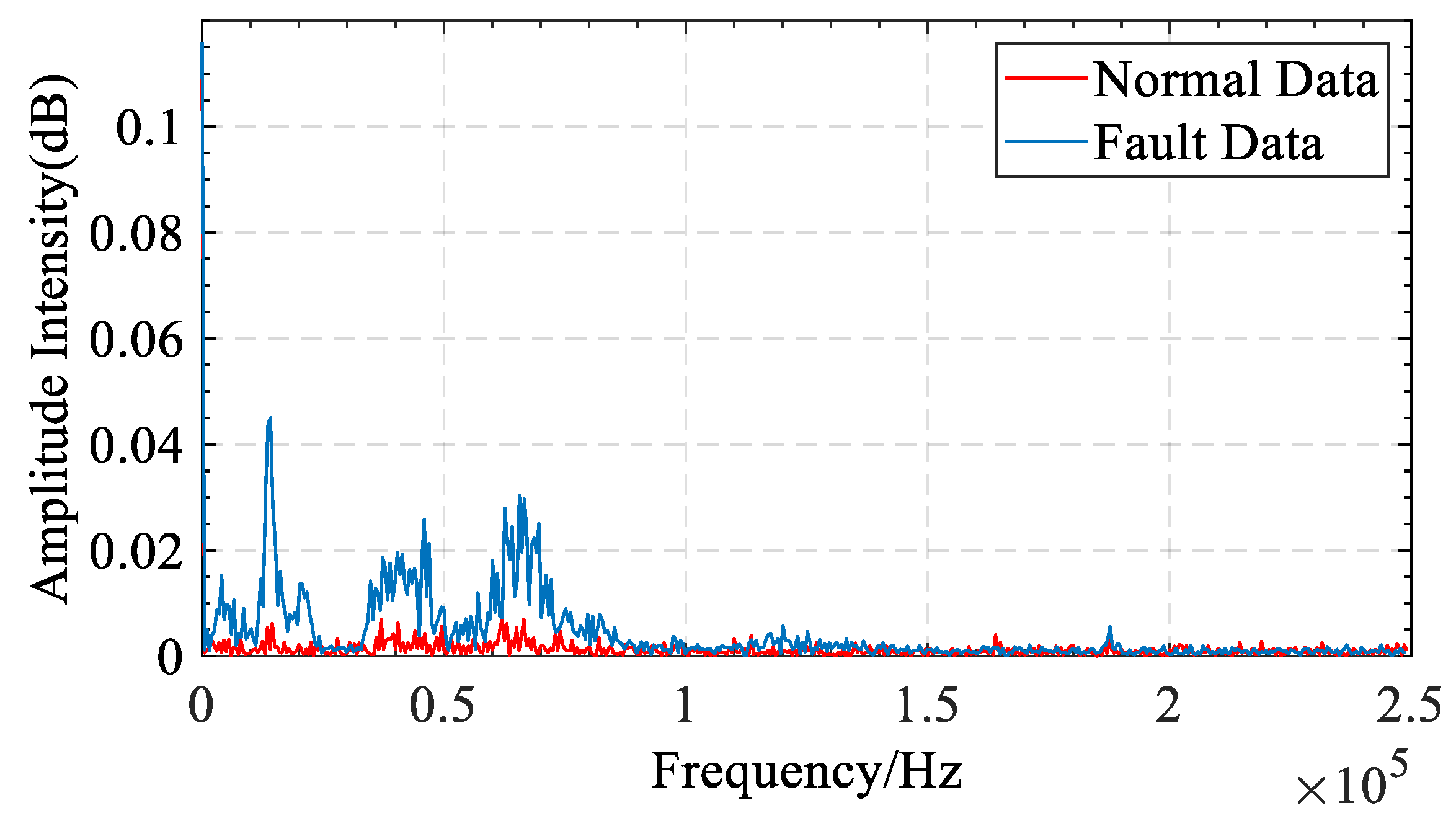
2.1. Characteristics of Arc Fault Data Acquisition
2.2. Adaptive Local Mean Decomposition (ALMD) Algorithm
- (i)
- Find all local extreme points of the original signal x(t), including all maximal and minimal points. Then calculate the ith mean of each two adjacent extrema and by Equation (1).
- (ii)
- The corresponding local magnitude of each half-wave oscillation is calculated by Equation (3).
- (iii)
- Separate the local mean function from the original signal using Equation (4).
- (iv)
- Then, demodulate by dividing it by , as presented in Equation (5).
- (v)
- The envelope signal is obtained by multiplying all the envelope estimation functions generated during the iterative process according to Equation (10).
- (vi)
- The first production function of the original signal is obtained by multiplying the resulting envelope signal with the pure FM signal based on Equation (11).
- (vii)
- The first PF component is separated from the original signal , then a new signal is obtained. Repeat the above steps with as the original data. Iterate P times until is a monotone function according to Equation (12):
- (viii)
- As mentioned above, several PFs can be obtained using the ALMD algorithm, and then the most suitable PF needs to be selected. Since kurtosis can effectively characterize the vibration amplitude, the PF with the largest kurtosis value is selected as the optimum PF, which includes more information about the arc fault. The kurtosis value of each PF is calculated according to Equation (13), and the normalized kurtosis value (NKV) of each PF is calculated by Equation (14).
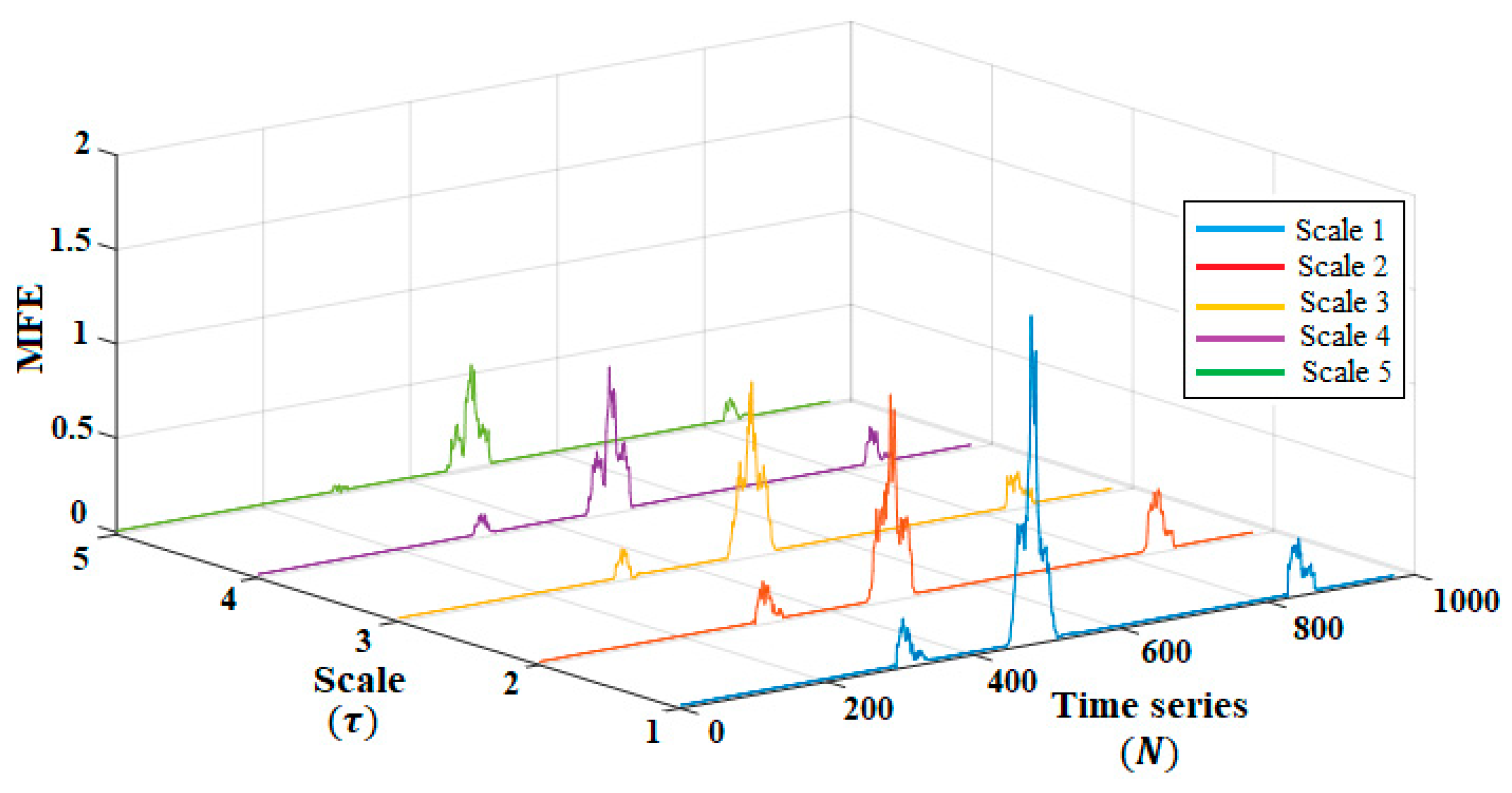
2.3. Multiscale Fuzzy Entropy (MFE)
- (i)
- First, a segment of data samples in the initial time series signal are chosen using a sliding window of fixed length. Then, the selected sequence of data samples {u(i): 1 ≤ i ≤ N} within the sliding time window has to be coarsened. The coarsened sequence at scale is created by Equation (15).
- (ii)
- Secondly, the coarsened sequence is transformed into a set of vectors, which is represented as in Equation (16):
- (iii)
- Finally, the multiscale fuzzy entropy at scale of the time series {u(i):1 ≤ i ≤ N} can be calculated as:
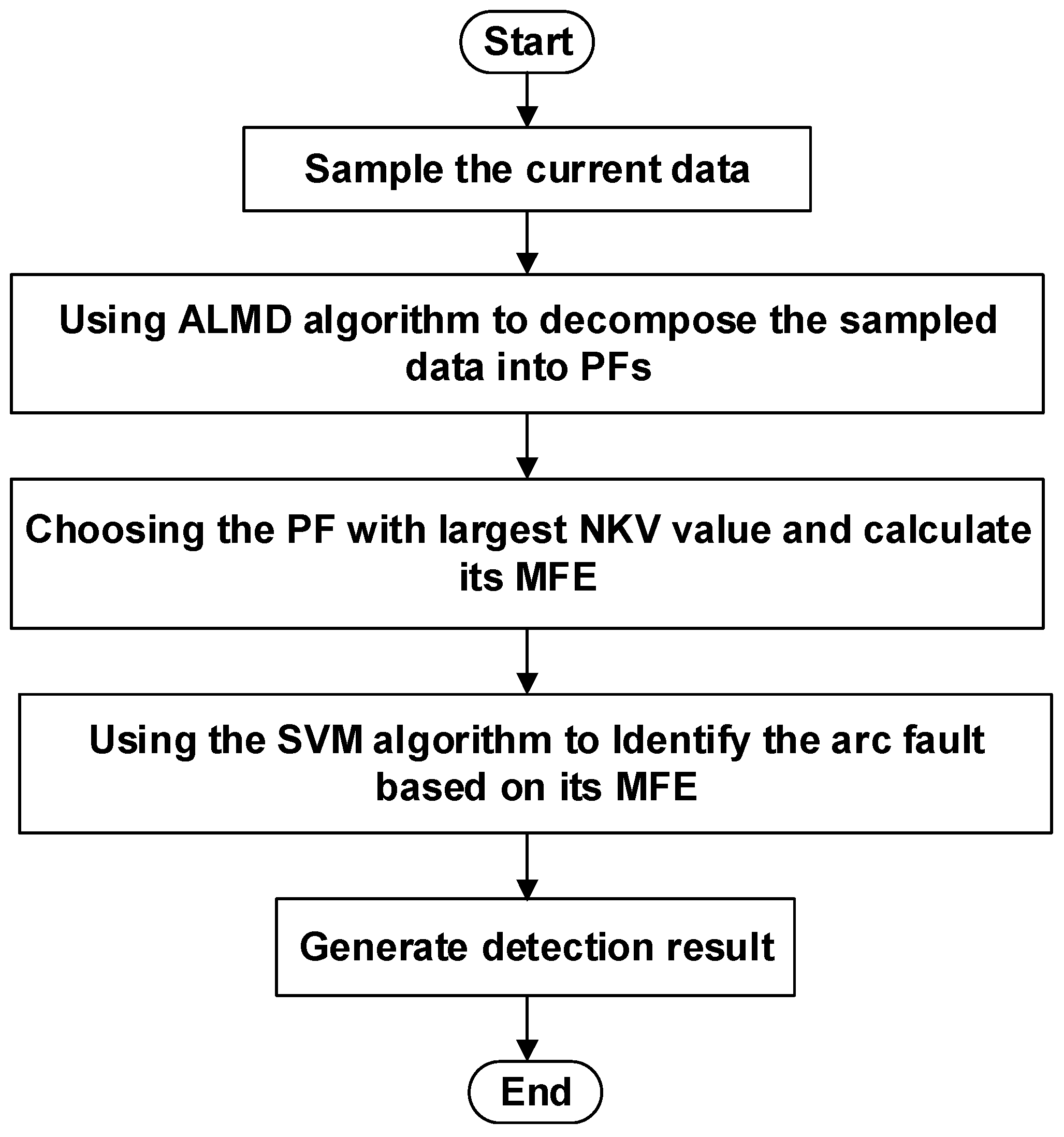
2.4. Arc Fault Detection Algorithm Execution Steps
- (i)
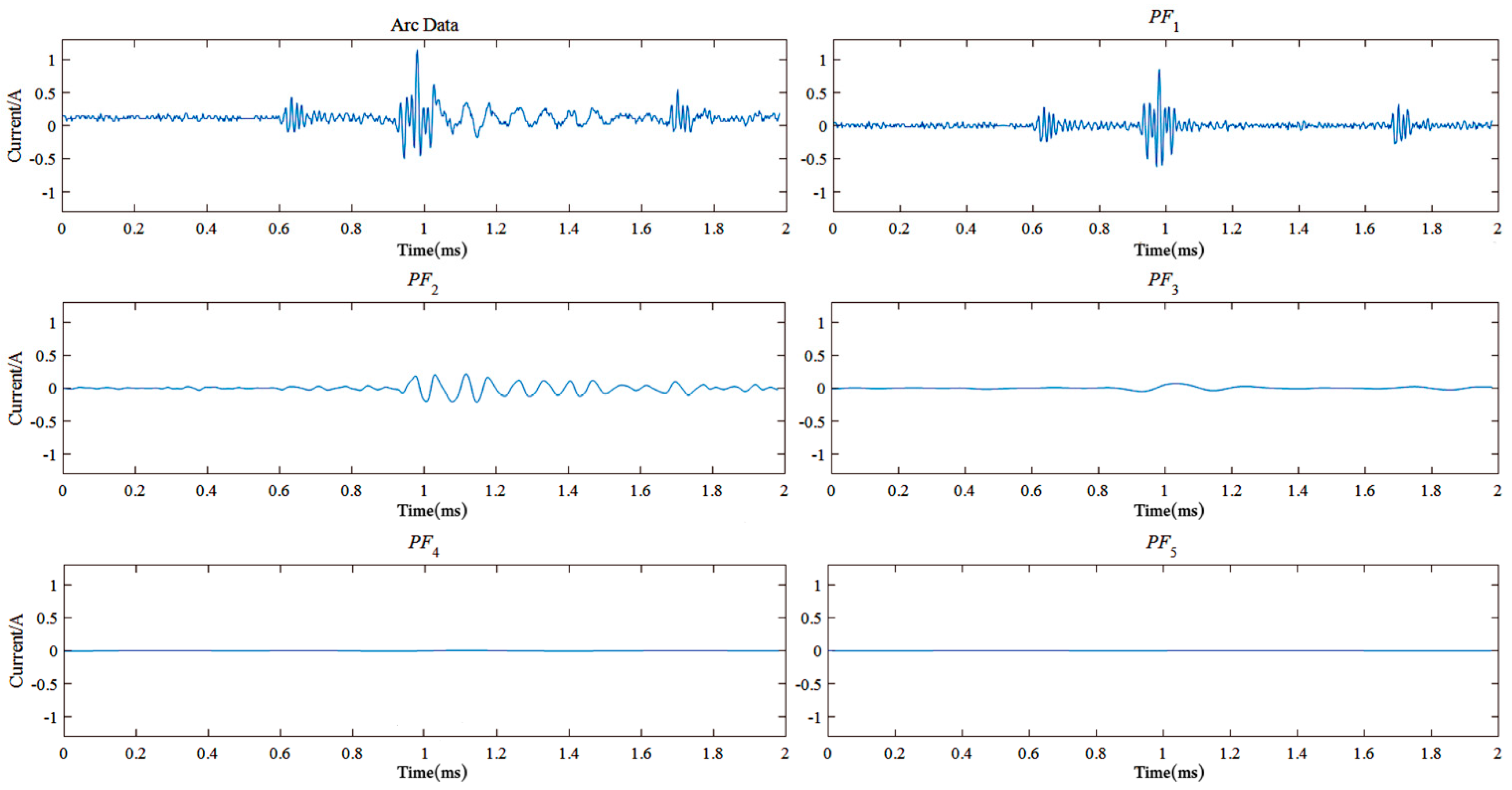
- The collected current data is decomposed using the ALMD algorithm to obtain multiple production functions (PFs) in the first step.
- (ii)
- In the second step, the normalized kurtosis value (NKV) of each production function (PF) is calculated, and the PF with the largest NKV is selected as the PF to be analyzed further.
- (iii)
- In the third step, the MFE values of the selected PF are calculated. Firstly, the length N of the sliding window for calculating the multiscale fuzzy entropy (MFE), the scale factor τ, the newly-constructed vector size m, the values of β and r are initialized. Then N samples are selected from the selected production functions by using the sliding window. The selected samples {u(i):1 ≤ i ≤ N} are coarsened using Equation (15). Then the coarsened sequence {y_τ (j):1 ≤ j ≤ (N − τ + 1)} is converted into vectors by using Equations (16) and (17). Finally, by defining the distance and similarity functions of these vectors {X_l^m:1 ≤ l ≤ (N − τ − m + 2)}, the MFE of the selected PF data within the sliding time window can be calculated using Equations (18)–(21). Then slide the data window forward, calculate the MFE of the selected PF data within the new sliding time window again. Until all the MFE values of the selected PF are derived window by window.
- (iv)
- In the final step, whether arc fault occurs is classified by using a support vector machine (SVM) algorithm. The SVM algorithm used in this paper is the LibSVM program provided by Chih-Chung Chang and Chih-Jen Lin, which will not be iterated in this paper [38].
3. Validation of the Proposed DC Series Arc Fault Detection Method
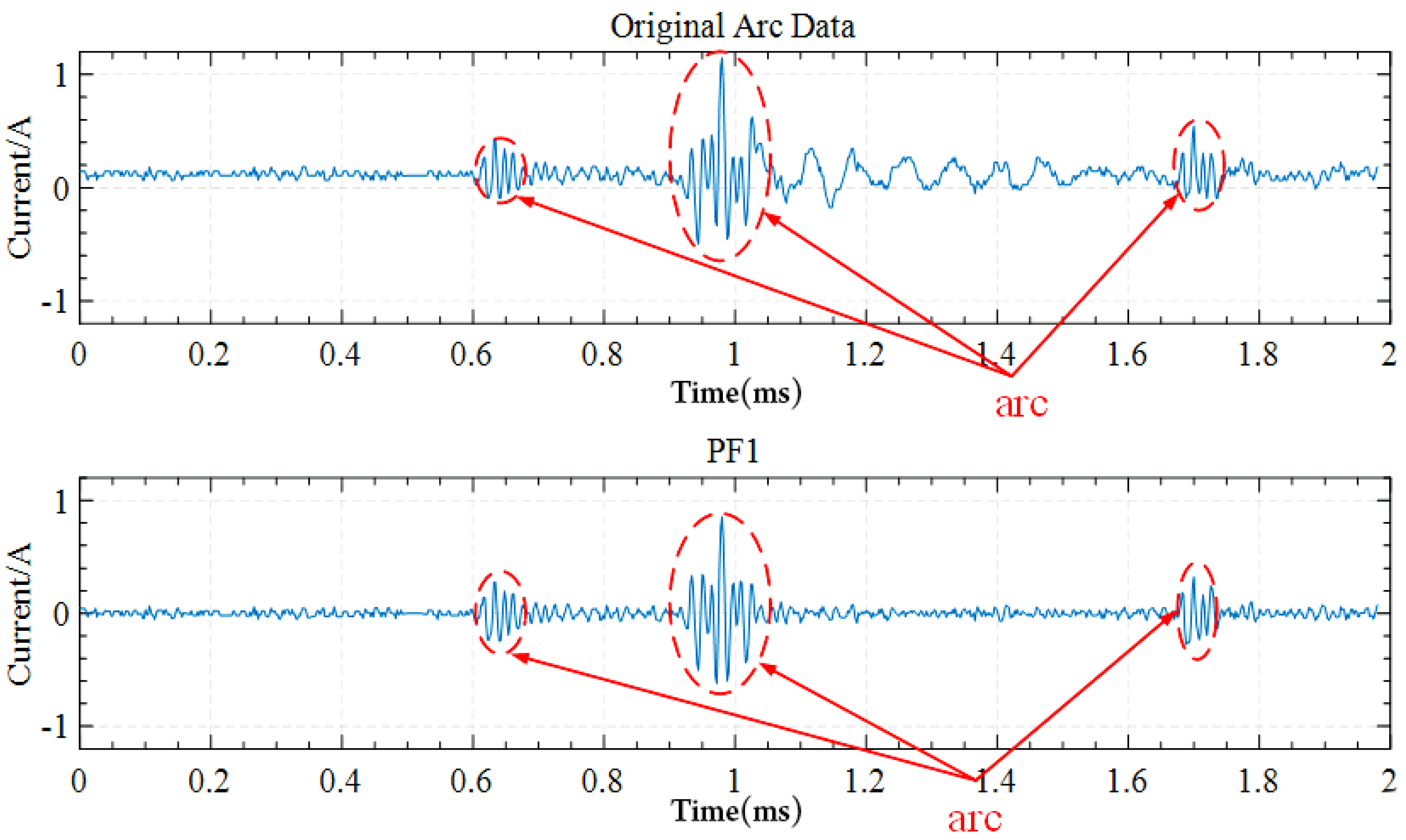
3.1. Selection of the Suitable Production Function (PF) after the ALMD Algorithm
3.2. Calculation of Multiscale Fuzzy Entropy (MFE)
3.3. Validation of the Proposed DC Series Arc Fault Detection Algorithm
- TP (true positive): The number of arc fault data that are classified as representing an arc fault condition.
- TN (true negative): The number of normal data that are classified as representing a normal condition.
- FP (false positive): The number of normal data that are classified as representing an arc fault condition.
- FN (false negative): The number of arc fault data that are classified as representing a normal condition.
- Accuracy (total correct outcomes/total outcomes) = (TP + TN)/(TP + TN + FP + FN).
- Precision (true positive outcomes/predicted positive outcomes) = (TP)/(TP + FP).
- Misclassification (total incorrect outcomes/total outcomes) = (FP + FN)/(TP + TN + FP + FN).
- Specificity (true negative outcomes/total actual negative outcomes) = (TN)/(TN + FP).
- Sensitivity (recall) (true positive outcomes/total actual positive outcomes) = (TP)/(TP + FN).
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xiong, Q.; Feng, X.; Gattozzi, A.L.; Liu, X.; Zheng, L.; Zhu, L.; Ji, S.; Hebner, R.E. Series Arc Fault Detection and Localization in DC Distribution System. IEEE Trans. Instrum. Meas. 2019, 69, 122–134. [Google Scholar] [CrossRef]
- Tharmakulasingam, S.; Lu, S.; Phung, B.T.; Zhang, D.; Ambikairajah, E. Sustainable Deep Learning at Grid Edge for Real-time High Impedance Fault Detection. IEEE Trans. Sustain. Comput. 2018. [Google Scholar] [CrossRef]
- Lodhi, E.; Wang, F.-Y.; Xiong, G.; Mallah, G.A.; Javed, M.Y.; Tamir, T.S.; Gao, D.W. A Dragonfly Optimization Algorithm for Extracting Maximum Power of Grid-Interfaced PV Systems. Sustainability 2021, 13, 10778. [Google Scholar] [CrossRef]
- Chen, L.; Wang, X. Adaptive Fault Localization in Photovoltaic Systems. IEEE Trans. Smart Grid 2017, 9, 6752–6763. [Google Scholar] [CrossRef]
- Lodhi, E.; Yang, P.; Wang, L.; Lodhi, Z.; Khan, M.A.; Muhammad, S.; Tamir, T.S. Modelling and Experimental Characteristics of Photovoltaic Modules in Typical Days at an Actual Photovoltaic Power Station. In Proceedings of the 2021 IEEE 4th International Conference on Automation, Electronics and Electrical Engineering (AUTEEE), Shenyang, China, 19–21 November 2021; pp. 28–33. [Google Scholar] [CrossRef]
- Haffaf, A.; Lakdja, F.; Abdeslam, D.O.; Meziane, R. Monitoring, measured and simulated performance analysis of a 2.4 kWp grid-connected PV system installed on the Mulhouse campus, France. Energy Sustain. Dev. 2021, 62, 44–55. [Google Scholar] [CrossRef]
- Lodhi, E.; Yang, P.; Wang, L.; Khan, M.A.; Lodhi, Z.; Javed, U.; Saleem, Q. Dragonfly Optimization-based MPPT Algorithm for Standalone PV System under Partial Shading. In Proceedings of the 2021 IEEE International Conference on Emergency Science and Information Technology (ICESIT), Chongqing, China, 22–24 November 2021; pp. 277–283. [Google Scholar] [CrossRef]
- Dang, H.-L.; Kwak, S.; Choi, S. Different Domains Based Machine and Deep Learning Diagnosis for DC Series Arc Failure. IEEE Access 2021, 9, 166249–166261. [Google Scholar] [CrossRef]
- Lodhi, E.; Lodhi, Z.; Shafqat, R.N.; Chen, F. Performance analysis of ‘perturb and observe’ and ‘incremental conductance’ MPPT algorithms for PV system. IOP Conf. Ser. Mater. Sci. Eng. 2017, 220, 012029. [Google Scholar] [CrossRef]
- Kerrouche, K.D.E.; Lodhi, E.; Kerrouche, M.B.; Wang, L.; Zhu, F.; Xiong, G. Modeling and design of the improved D-STATCOM control for power distribution grid. SN Appl. Sci. 2020, 2, 1–11. [Google Scholar] [CrossRef]
- Pei, T.; Li, L.; Zhang, J.; Hao, X. Module block fault locating strategy for large-scale photovoltaic arrays. Energy Convers. Manag. 2020, 214, 112898. [Google Scholar] [CrossRef]
- Lu, S.; Phung, B.; Zhang, D. A comprehensive review on DC arc faults and their diagnosis methods in photovoltaic systems. Renew. Sustain. Energy Rev. 2018, 89, 88–98. [Google Scholar] [CrossRef]
- Dhar, S.; Patnaik, R.K.; Dash, P.K. Fault Detection and Location of Photovoltaic Based DC Microgrid Using Differential Protection Strategy. IEEE Trans. Smart Grid 2017, 9, 4303–4312. [Google Scholar] [CrossRef]
- Lodhi, E.; Lina, W.; Pu, Y.; Javed, M.Y.; Lodhi, Z.; Zhijie, J.; Javed, U. Performance Evaluation of Faults in a Photovoltaic Array Based on V-I and V-P Characteristic Curve. In Proceedings of the 2020 12th International Conference on Measuring Technology and Mechatronics Automation (ICMTMA), Phuket, Thailand, 28–29 February 2020; pp. 85–90. [Google Scholar] [CrossRef]
- Lu, S.; Ma, R.; Sirojan, T.; Phung, B.; Zhang, D. Lightweight transfer nets and adversarial data augmentation for photovoltaic series arc fault detection with limited fault data. Int. J. Electr. Power Energy Syst. 2021, 130, 107035. [Google Scholar] [CrossRef]
- Humbert, J.B.; Schweitzer, P.; Weber, S. Serial-arc detection by use of Spectral Dispersion Index (SDI) analysis in a low-voltage network (270V HVDC). Electr. Power Syst. Res. 2021, 196, 107084. [Google Scholar] [CrossRef]
- Underwriters Laboratories. Standard for Safety for Photovoltaic (PV) DC Arc-Fault Circuit Protection[S]; Subject 1699B; Underwriters Laboratories: Northbrook, IL, USA, 2018. [Google Scholar]
- Yao, X.; Herrera, L.; Ji, S.; Zou, K.; Wang, J. Characteristic Study and Time-Domain Discrete- Wavelet-Transform Based Hybrid Detection of Series DC Arc Faults. IEEE Trans. Power Electron. 2013, 29, 3103–3115. [Google Scholar] [CrossRef]
- Chae, S.; Park, J.; Oh, S. Series DC Arc Fault Detection Algorithm for DC Microgrids Using Relative Magnitude Comparison. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 1270–1278. [Google Scholar] [CrossRef]
- Chen, S.; Li, X.; Xiong, J. Series Arc Fault Identification for Photovoltaic System Based on Time-Domain and Time-Frequency-Domain Analysis. IEEE J. Photovoltaics 2017, 7, 1105–1114. [Google Scholar] [CrossRef]
- He, C.; Mu, L.; Wang, Y. The Detection of Parallel Arc Fault in Photovoltaic Systems Based on a Mixed Criterion. IEEE J. Photovoltaics 2017, 7, 1717–1724. [Google Scholar] [CrossRef]
- Thomas, S.R.; Kurupath, V.; Nair, U. A passive islanding detection method based on K-means clustering and EMD of reactive power signal. Sustain. Energy Grids Netw. 2020, 23, 100377. [Google Scholar] [CrossRef]
- Wang, L.; Qiu, H.; Yang, P.; Mu, L. Arc Fault Detection Algorithm Based on Variational Mode Decomposition and Improved Multi-Scale Fuzzy Entropy. Energies 2021, 14, 4137. [Google Scholar] [CrossRef]
- Li, T.; Jiao, Z.; Wang, L.; Mu, Y. A Method of DC Arc Detection in All-Electric Aircraft. Energies 2020, 13, 4190. [Google Scholar] [CrossRef]
- Jia, F.; Luo, L.; Gao, S.; Ye, J. Logistic Regression Based Arc Fault Detection in Photovoltaic Systems Under Different Conditions. J. Shanghai Jiaotong Univ. Sci. 2019, 24, 459–470. [Google Scholar] [CrossRef]
- He, W.; Yin, D.; Zhang, K.; Zhang, X.; Zheng, J. Fault Detection and Diagnosis Method of Distributed Photovoltaic Array Based on Fine-Tuning Naive Bayesian Model. Energies 2021, 14, 4140. [Google Scholar] [CrossRef]
- Ahmadi, M.; Samet, H.; Ghanbari, T. A New Method for Detecting Series Arc Fault in Photovoltaic Systems Based on the Blind-Source Separation. IEEE Trans. Ind. Electron. 2019, 67, 5041–5049. [Google Scholar] [CrossRef]
- Jiang, R.; Bao, G.; Hong, Q.; Booth, C.D. A Coupling Method for Identifying Arc Faults Based on Short-Observation-Window SVDR. IEEE Trans. Instrum. Meas. 2021, 70, 1–10. [Google Scholar] [CrossRef]
- Ananthan, S.N.; Feng, X.; Penney, C.; Gattozzi, A.; Hebner, R.; Santoso, S. Voltage Differential Protection for Series Arc Fault Detection in Low-Voltage DC Systems. Inventions 2020, 6, 5. [Google Scholar] [CrossRef]
- Miao, W.; Xu, Q.; Lam, K.H.; Pong, P.W.T.; Poor, H.V. DC Arc-Fault Detection Based on Empirical Mode Decomposition of Arc Signatures and Support Vector Machine. IEEE Sensors J. 2020, 21, 7024–7033. [Google Scholar] [CrossRef]
- Smith, J.S. The local mean decomposition and its application to EEG perception data. J. R. Soc. Interface 2005, 2, 443–454. [Google Scholar] [CrossRef]
- Li, Y.; Xu, M.; Wang, R.; Huang, W. A fault diagnosis scheme for rolling bearing based on local mean decomposition and improved multiscale fuzzy entropy. J. Sound Vib. 2016, 360, 277–299. [Google Scholar] [CrossRef]
- Zhu, X.-J.; Fan, L.-J.; Lv, S.-Q.; Yu, X.-L. Application Research of LMD Method in EEG Signal Processing. Comput. Sci. 2012, 39, 273–275. [Google Scholar]
- Chen, C.; Tsai, C.; Chang, F. Early sonographic diagnosis of fetal acrania. Int. J. Gynecol. Obstet. 1992, 39, 235–236. [Google Scholar] [CrossRef]
- Richman, J.S.; Moorman, J.R. Physiological time-series analysis using approximate entropy and sample entropy. Am. J. Physiol. Heart Circ. Physiol. 2000, 278, H2039–H2049. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xie, H.-B.; He, W.-X.; Liu, H. Measuring time series regularity using nonlinear similarity-based sample entropy. Phys. Lett. A 2008, 372, 7140–7146. [Google Scholar] [CrossRef]
- Costa, M.D.; Peng, C.-K.; Goldberger, A.L. Multiscale Analysis of Heart Rate Dynamics: Entropy and Time Irreversibility Measures. Cardiovasc. Eng. 2008, 8, 88–93. [Google Scholar] [CrossRef] [Green Version]
- Chang, C.; Lin, C. LIBSVM: A Library for Support Vector Machines. ACM Trans. Intell. Syst. Technol. 2011, 2, 1–27. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | PF1 | PF2 | PF3 | PF4 | PF5 |
|---|---|---|---|---|---|
| NKV | 0.95613 | 0.04343 | 0.00030 | 0.00009 | 0.00005 |
| NKV | Label | PF1 | PF2 | PF3 | PF4 | PF5 |
|---|---|---|---|---|---|---|
| Normal | 1 | 0.93467 | 0.06062 | 0.00439 | 0.00021 | 0.00011 |
| Normal | 2 | 0.97315 | 0.02642 | 0.00020 | 0.00015 | 0.00008 |
| Normal | 3 | 0.90612 | 0.08131 | 0.01240 | 0.00016 | 0.00001 |
| Fault | 1 | 0.97959 | 0.02001 | 0.00021 | 0.00011 | 0.00009 |
| Fault | 2 | 0.97971 | 0.01855 | 0.00170 | 0.00003 | 0.00003 |
| Fault | 3 | 0.91612 | 0.08339 | 0.00025 | 0.00017 | 0.00006 |
| Result Type | TP | FP | TN | FN | Total |
|---|---|---|---|---|---|
| Number | 260 | 0 | 530 | 10 | 800 |
| Percentage | 32.5% | 0% | 66.25% | 1.25% | 100% |
| Different Algorithms | Metrics | ||||
|---|---|---|---|---|---|
| Accuracy | Misclassification | Precision | Specificity | Sensitivity (Recall) | |
| Logistic regression | 93% | 7% | 100% | 100% | 82.8% |
| Naive Bayes | 97.75% | 2.25% | 96.54% | 98.33% | 96.54% |
| The proposed method | 98.75% | 1.25% | 100% | 100% | 96.30% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Lodhi, E.; Yang, P.; Qiu, H.; Rehman, W.U.; Lodhi, Z.; Tamir, T.S.; Khan, M.A. Adaptive Local Mean Decomposition and Multiscale-Fuzzy Entropy-Based Algorithms for the Detection of DC Series Arc Faults in PV Systems. Energies 2022, 15, 3608. https://doi.org/10.3390/en15103608
Wang L, Lodhi E, Yang P, Qiu H, Rehman WU, Lodhi Z, Tamir TS, Khan MA. Adaptive Local Mean Decomposition and Multiscale-Fuzzy Entropy-Based Algorithms for the Detection of DC Series Arc Faults in PV Systems. Energies. 2022; 15(10):3608. https://doi.org/10.3390/en15103608
Chicago/Turabian StyleWang, Lina, Ehtisham Lodhi, Pu Yang, Hongcheng Qiu, Waheed Ur Rehman, Zeeshan Lodhi, Tariku Sinshaw Tamir, and M. Adil Khan. 2022. "Adaptive Local Mean Decomposition and Multiscale-Fuzzy Entropy-Based Algorithms for the Detection of DC Series Arc Faults in PV Systems" Energies 15, no. 10: 3608. https://doi.org/10.3390/en15103608
APA StyleWang, L., Lodhi, E., Yang, P., Qiu, H., Rehman, W. U., Lodhi, Z., Tamir, T. S., & Khan, M. A. (2022). Adaptive Local Mean Decomposition and Multiscale-Fuzzy Entropy-Based Algorithms for the Detection of DC Series Arc Faults in PV Systems. Energies, 15(10), 3608. https://doi.org/10.3390/en15103608