
Synthesis of Driving Cycles Based on Low-Sampling-Rate Vehicle-Tracking Data and Markov Chain Methodology



Abstract
:1. Introduction
2. Problem Description
2.1. On Importance of Microsimulations for Transport Electrification Planning Purposes
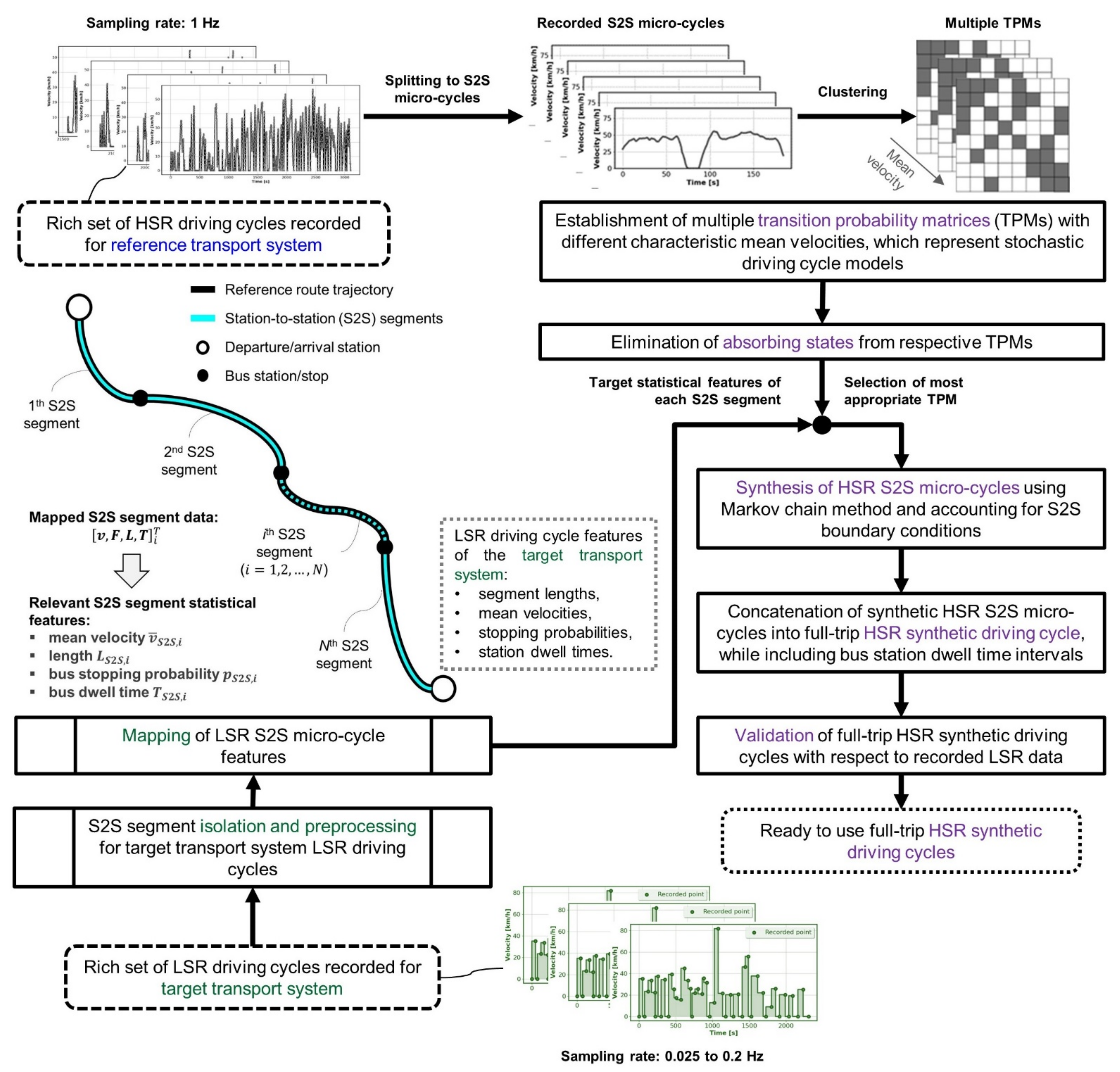
2.2. High-Sampling-Rate (HSR) Driving Cycle Synthesis Framework
2.3. Requirements on Process of Generating HSR Driving Cycles
- Information related to bus route(s): reference GPS coordinates of route, station locations, and route timetable.
- LSR GPS tracking data: time series of vehicle geographical coordinates (latitude and longitude), elevation (altitude), velocity, and cumulative distance travelled.
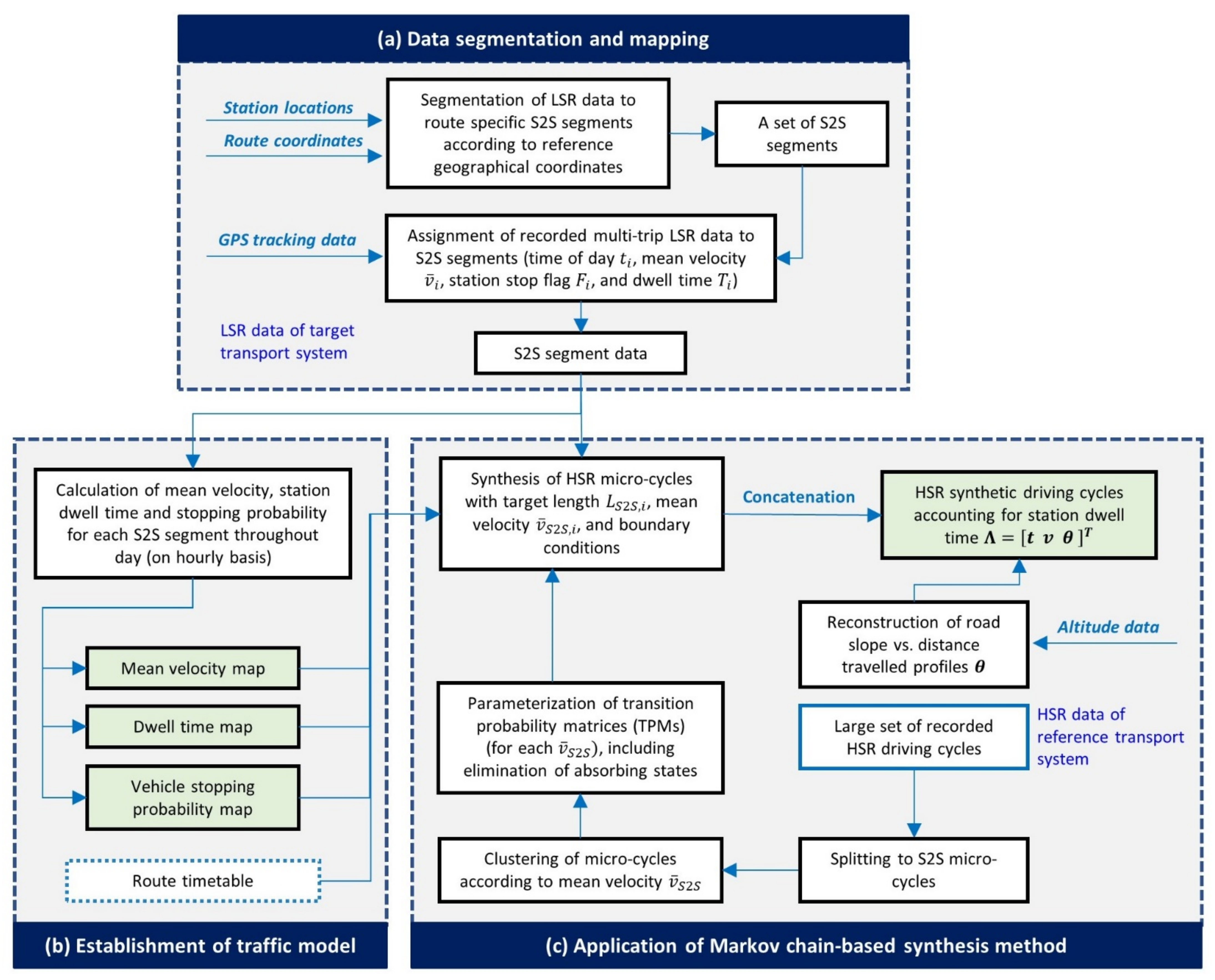
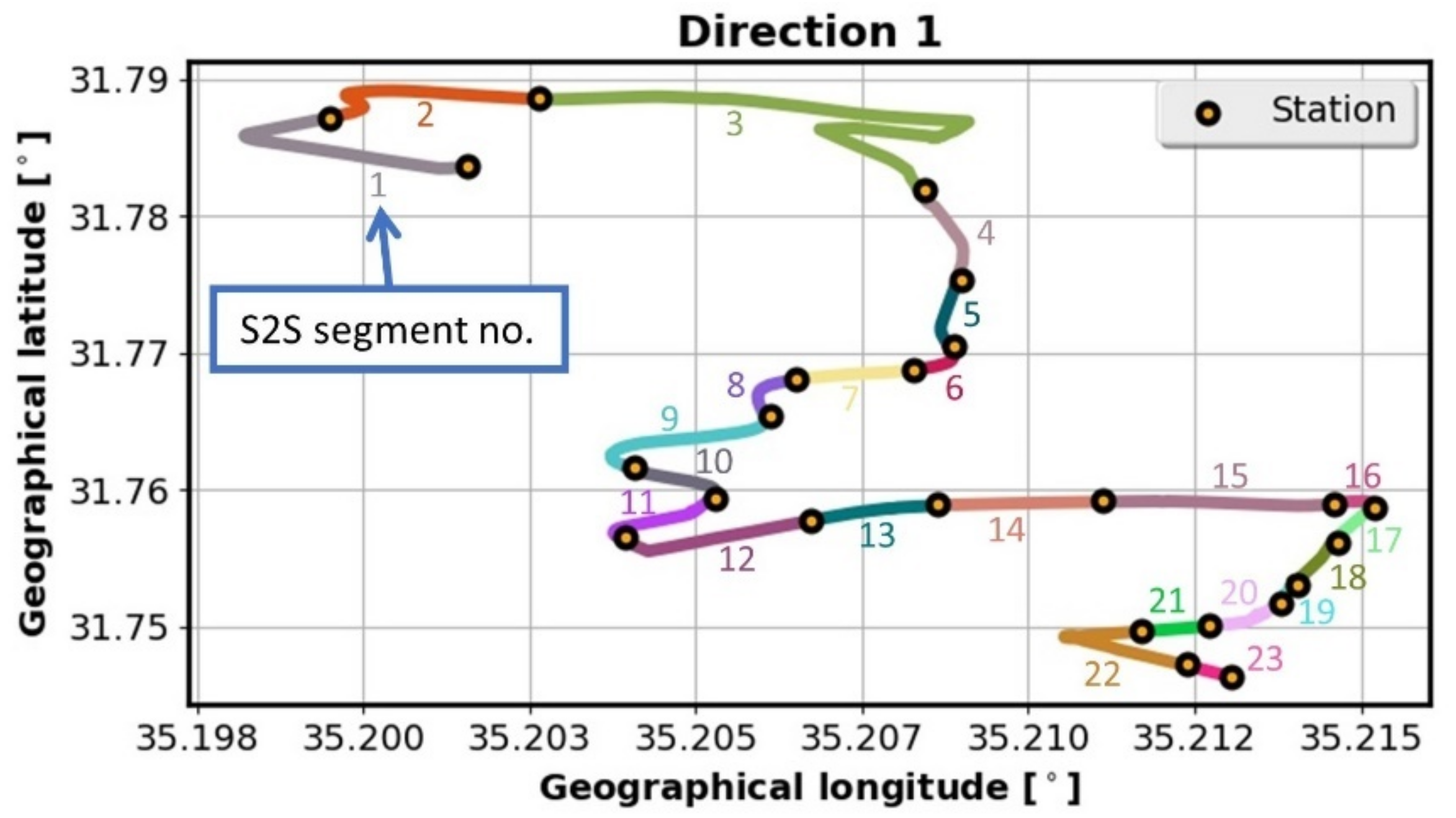
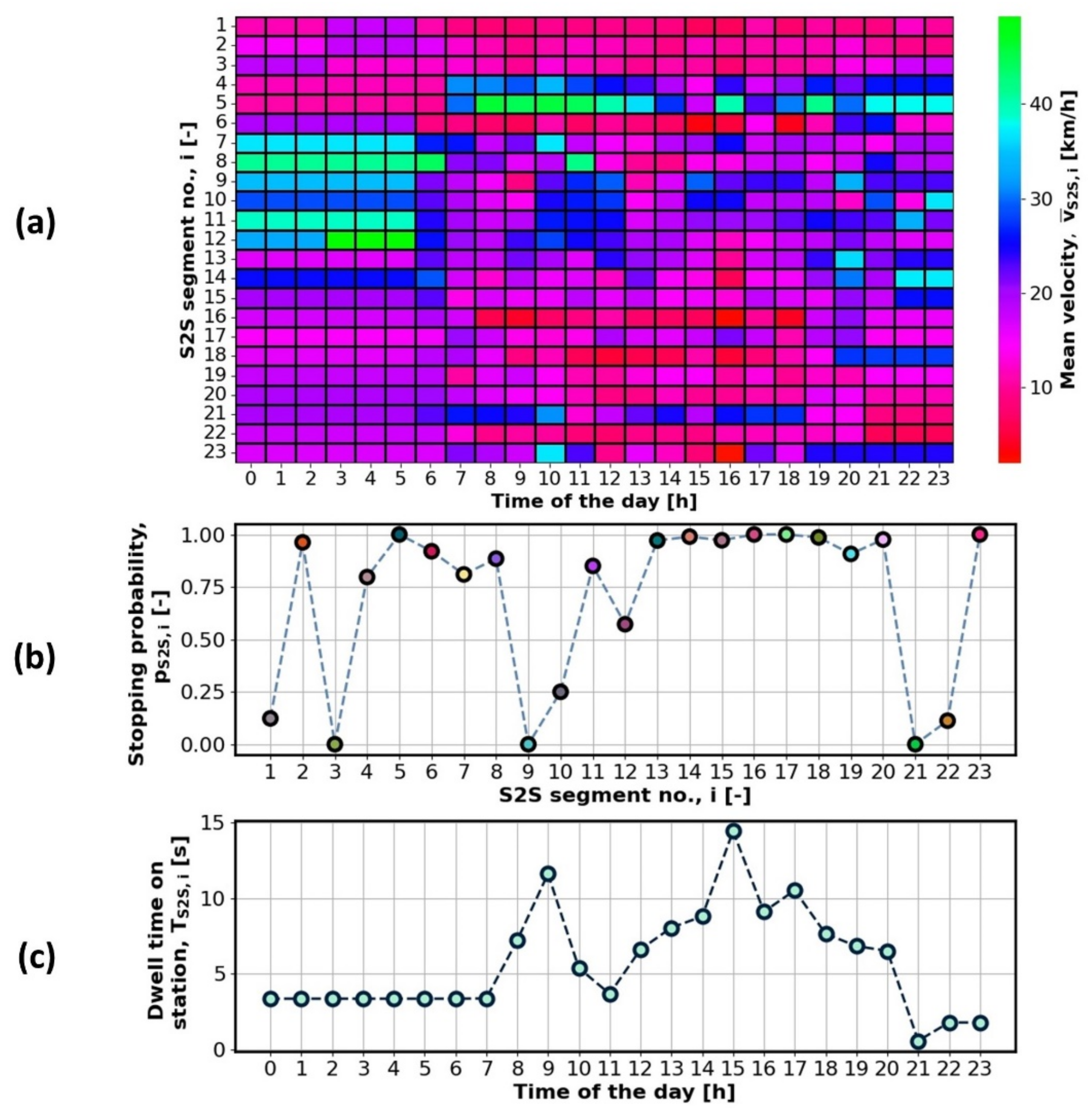
2.4. LSR Data-Supported Traffic Model Generation
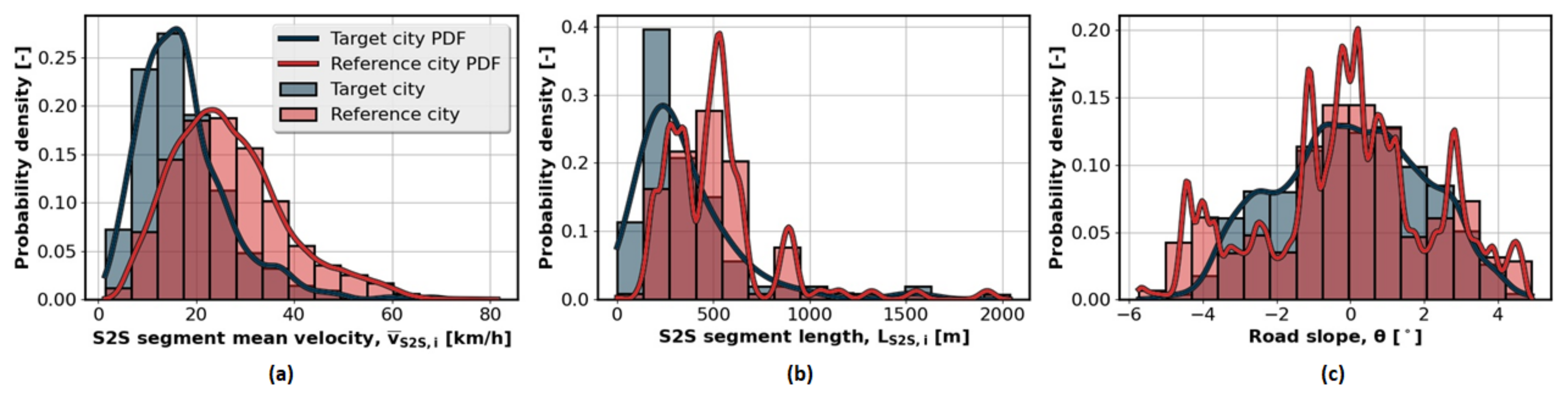
2.5. Comparative Characteristics of Target and Reference City
3. Fundamentals of Markov-Chain-Based Method of Driving Cycles Synthesis
3.1. Modeling of Driving Cycles
3.2. Generation of Synthetic Driving Cycles
- ▪
- In the initial time step ( the vehicle velocity and acceleration states are initialized to arbitrary values (typically to zeros).
- ▪
- Being in the state the next state is determined by sampling from the distribution stored in the TPM by using a random number generator.
- ▪
- The process is iteratively repeated until meeting a terminating condition (e.g., the target time duration or target travelled distance).
3.3. Validation of Synthetic Driving Cycles
4. Synthesis of HSR Driving Cycles from LSR Data-Based Traffic Model
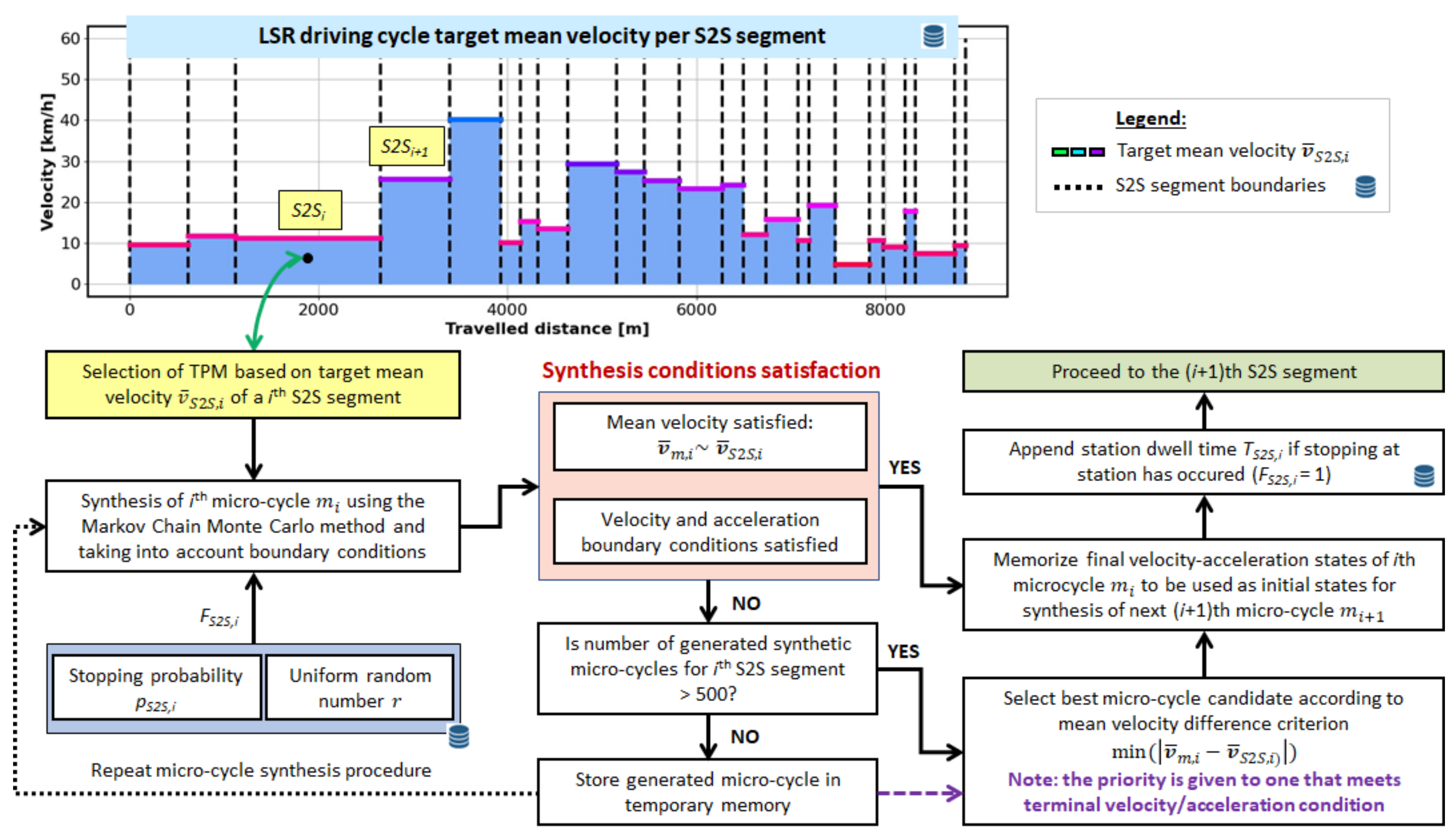
4.1. Procedure of S2S Micro-Cycle Synthesis
- i.
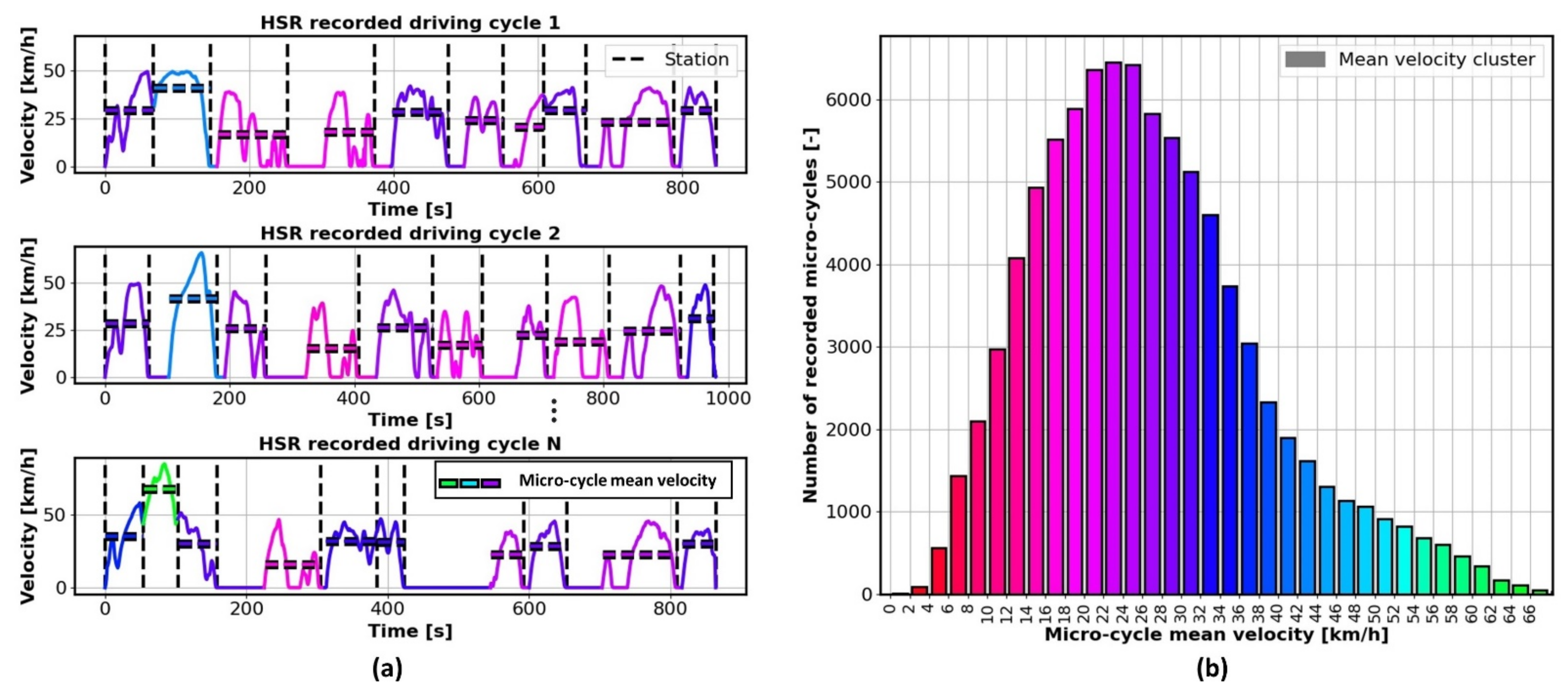
- Clustering the HSR-recorded micro-cycles and determining the corresponding TPMs (Section 4.2).
- ii.
- Setting the velocity and acceleration initial conditions to match the final conditions of the prior S2S segment micro-cycle, acquiring the target statistical features from the LSR data-based traffic model for the given S2S segment, and selecting the TPM based on the target S2S segment mean velocity.
- iii.
- Randomly determining if the vehicle should stop at the segment end-station based on the predefined stopping probability as:where is the bus-stopping flag and is random number sampled from the uniform distribution. If this condition is satisfied, the final condition is set to zero velocity/acceleration; otherwise, the final condition is unspecified/floating.
- iv.
- Generating synthetic micro-cycle based on the selected TPM and target statistical features including travelled distance and the determined boundary (initial and final) conditions.
- v.
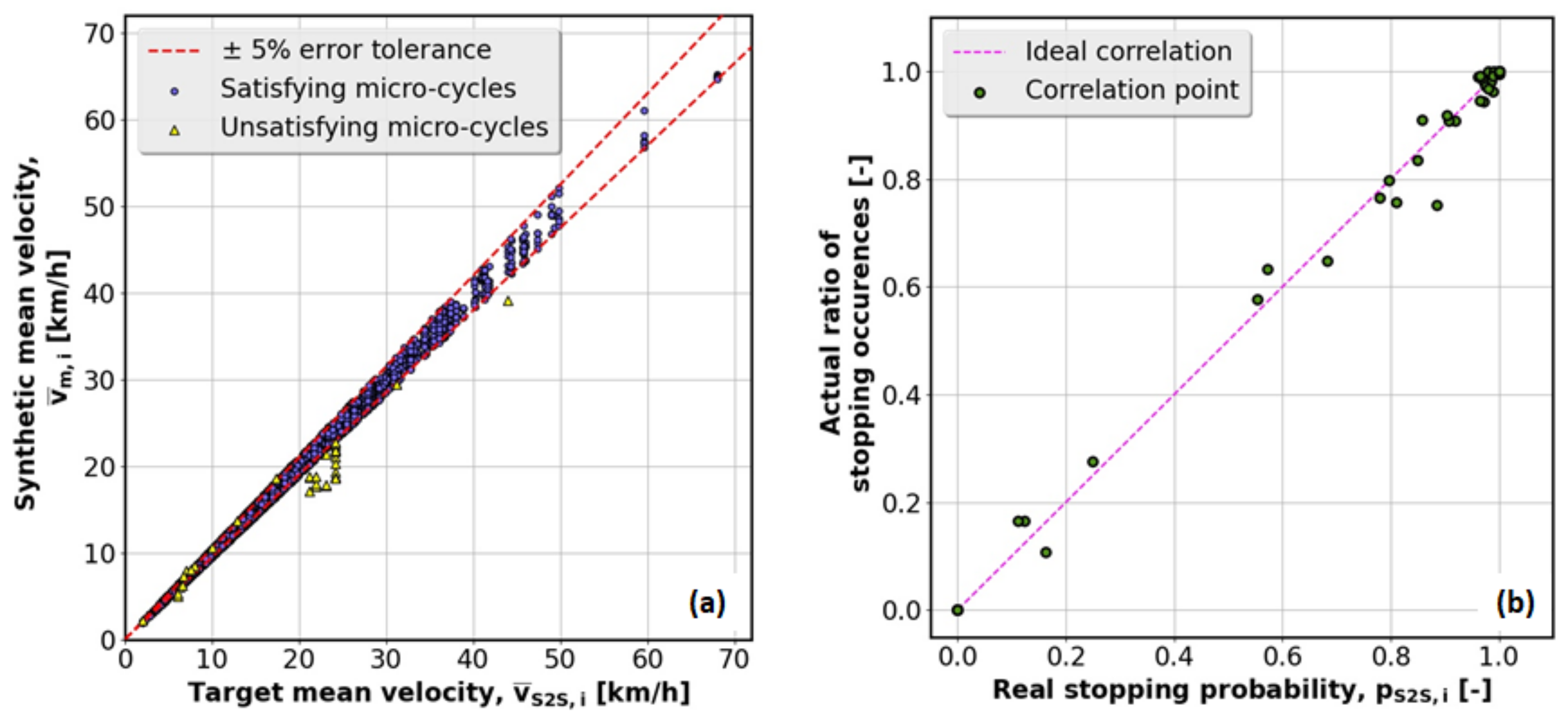
- Checking if the target S2S segment mean vehicle velocity is achieved under the specified tolerances (±5%). If the selection condition is satisfied, the generated micro-cycle is adopted. Otherwise, new micro-cycles are iteratively generated and the selection condition is continuously checked. If the selection condition is not satisfied in a pre-defined number of iterations (500 here), the micro-cycle with the mean velocity closest to the target value is selected.
4.2. Clustering of HSR-Recorded Micro-Cycles and Determining Corresponding TPMs
4.3. Accounting for Stopping-Related Final Condition
4.3.1. Using Additional TPM Related to Stopping Mode
4.3.2. Using Dual TPMs
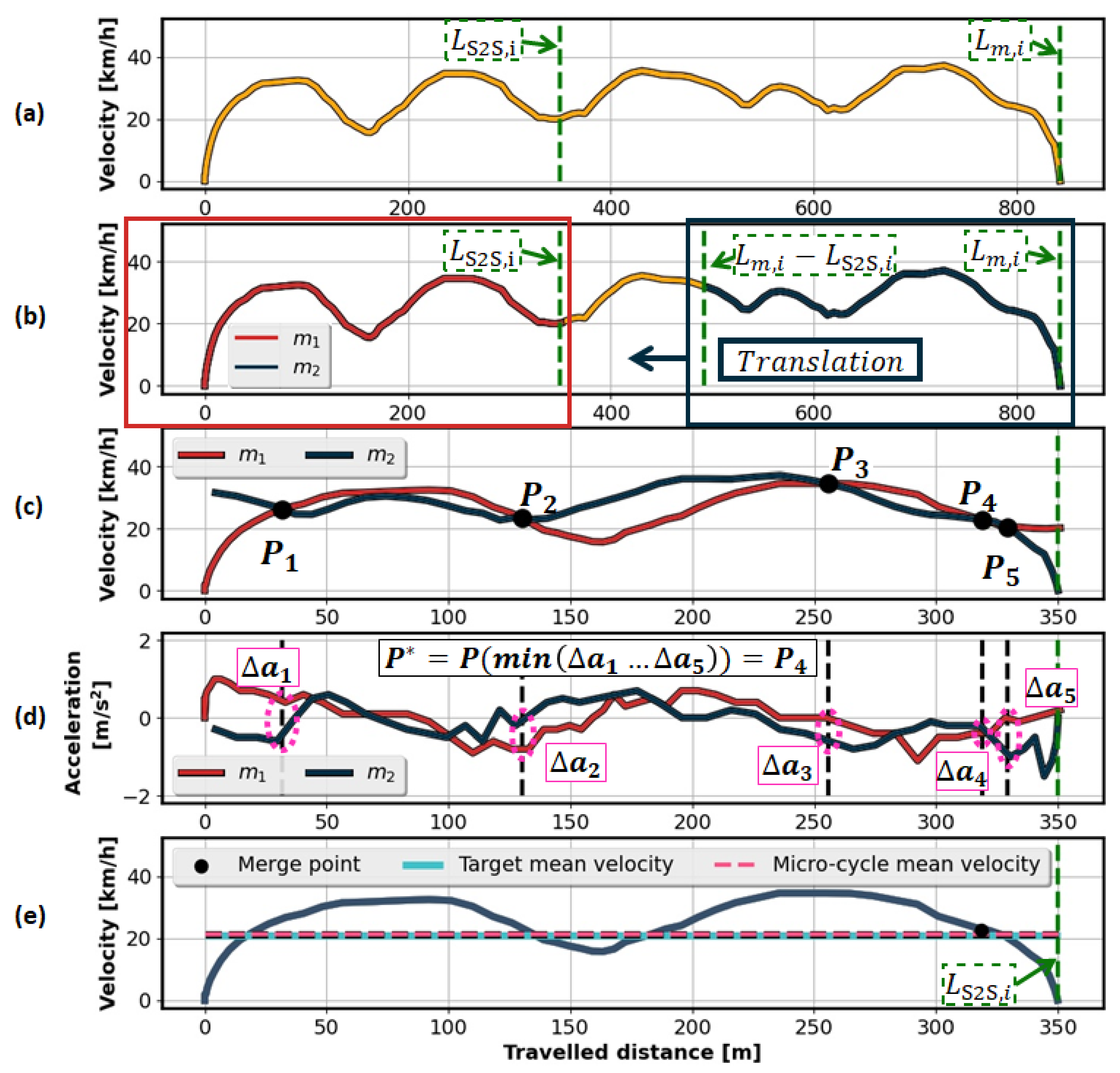
4.3.3. Using Compression of Micro-Cycle Expanded to Stopping
- i.
- Using the regular TPM to generate a single micro-cycle whose length is greater or equal than the target length and at the same time corresponds to the minimum length for which the zero-velocity final condition is reached (Figure 11a). It should be noted that only the TPMs corresponding to the range from 0 to 48 km/h can be selected in this procedure, because the recorded driving cycles used for calculating TPMs with mean velocities greater than 48 km/h did not include S2S segment end-station-stopping. Therefore, if the target mean velocity is in the range [50, 68] km/h (see Figure 8b), the TPM corresponding to the mean-velocity range [46, 48] km/h is exceptionally employed in the synthesis process to make it consistent.
- ii.
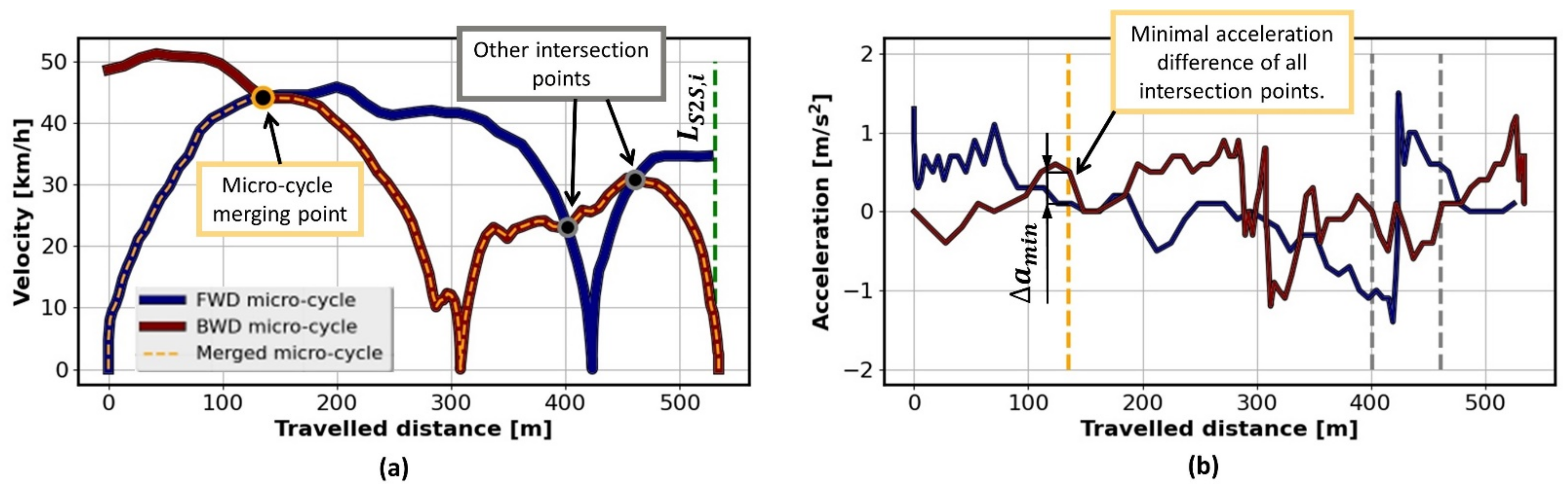
- Decomposing the generated micro-cycle into left- and right-end sections, denoted in Figure 11b as and , respectively, where both have the length equal to the target length .
- iii.
- iv.
- Detecting intersection points () of the aligned velocity vs. distance profiles and (Figure 11c).
- v.
- Determining the merging point P* as the one that minimizes the acceleration bump between the profiles and (see illustration in Figure 11d, showing that is the merging point).
- vi.
- Merging the profiles and in the intersection point to obtain the final, single micro-cycle (Figure 11e).
4.3.4. Brief Comparative Assessment and Recommendation
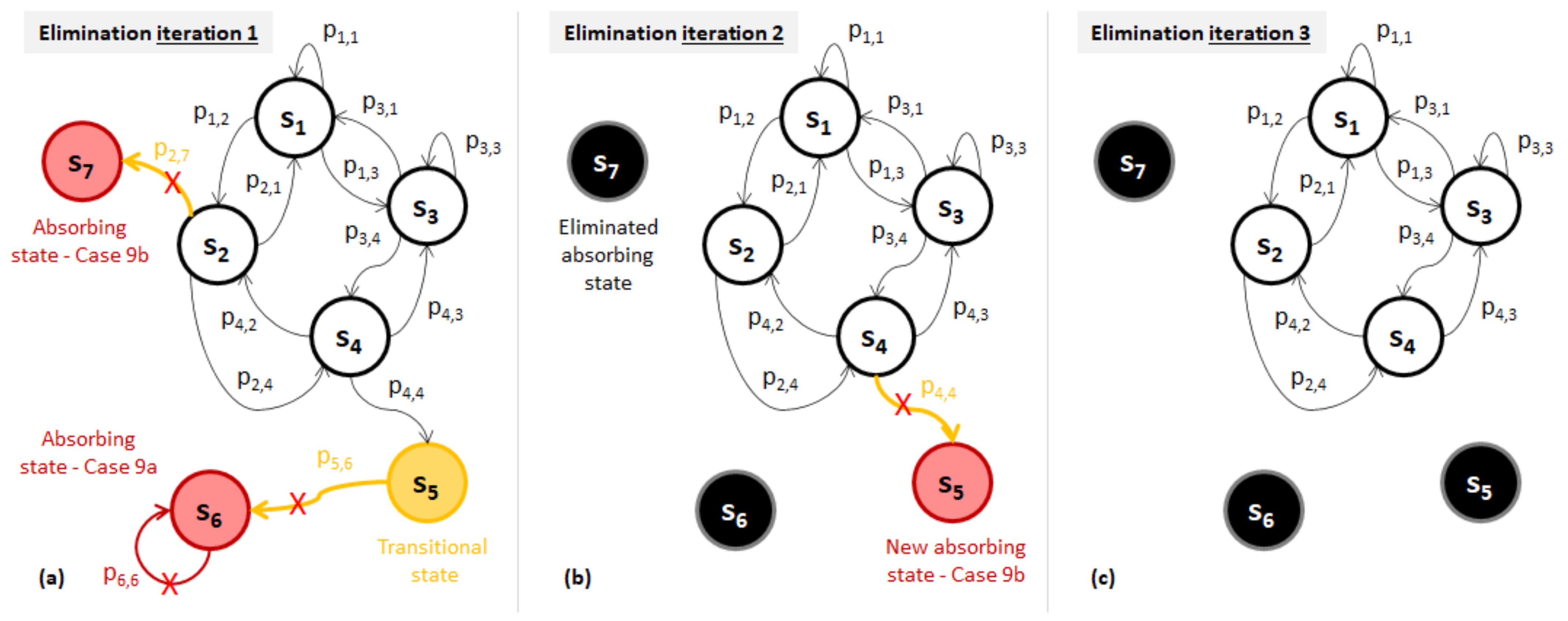
4.4. Ensuring Feasibility of Micro-Cycle Synthesis Procedure
- Iterate through all TPM states, detect all absorbing states based on conditions (9a) and (9b), and set their transition probabilities to zero (see states and transition probabilities highlighted in red in Figure 12a).
- Find all TPM states that directly lead to the absorbing states detected in Point 1 (see transition probabilities highlighted in orange in Figure 12a).
- Set the TPM probabilities corresponding to the transitions from the states detected in Point 2 to the absorbing states from Point 1 to zero (see “X” marks in Figure 12a).
- If the transitional states found in Point 2 are such that they lead only to absorbing states detected in Point 1 (see state highlighted in orange in Figure 12a), then declare these transitional states as the absorbing ones (Figure 12b) and apply the elimination steps defined by Points 1-3 to them, as well.
- Re-normalize the corrected TPM (Figure 12c) to satisfy condition (6).
5. Validation of Proposed Micro-Cycle-Based Synthesis Method
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| GPS | Global Positioning System |
| HSR | High sampling rate |
| LSR | Low sampling rate |
| MCMC | Monte Carlo Markov Chain (method) |
| Probability density function | |
| S2S | Station-to-station (segment, micro-cycle, etc.) |
| TPM | Transition probability matrix |
References
- European Commission. Available online: https://ec.europa.eu/clima/policies/strategies/2050_en (accessed on 22 April 2022).
- Carlson, R.; Lohse-Busch, H.; Duoba, M.; Shidore, N. Drive Cycle Fuel Consumption Variability of Plug-In Hybrid Electric Vehicles due to Aggressive Driving; SAE Technical Paper 2009-01-1335; SAE World Congress: Detroit, MI, USA, 2009. [Google Scholar]
- Fontaras, G.; Franco, V.; Dilara, P.; Martini, G.; Manfredi, U. Development and Review of Euro 5 Passenger Car Emission Factors Based on Experimental Results Over Various Driving Cycles. Sci. Total Environ. 2014, 468, 1034–1042. [Google Scholar] [CrossRef] [PubMed]
- Giakoumis, E.G. Driving and Engine Cycles; Springer: Cham, Switzerland, 2017; pp. 1–63. [Google Scholar]
- Barlow, T.; Latham, S.; Mccrae, I.; Boulter, P. A Reference Book of Driving Cycles for Use in the Measurement of Road Vehicle Emissions. In TRL Published Project Report; Transport Research Laboratory: Wokingham, UK, 2009. [Google Scholar]
- Huertas, J.I.; Giraldo, M.; Quirama, L.F.; Díaz, J. Driving Cycles Based on Fuel Consumption. Energies 2018, 11, 3064. [Google Scholar] [CrossRef] [Green Version]
- Andrade, G.M.S.D.; Araújo, F.W.C.D.; Santos, M.P.M.D.N.; Magnani, F.S. Standardized Comparison of 40 Local Driving Cycles: Energy and Kinematics. Energies 2020, 13, 5434. [Google Scholar] [CrossRef]
- Rajan, B.V.P.; McGordon, A.; Jennings, P.A. An Investigation on the Effect of Driver Style and Driving Events on Energy Demand of a PHEV. World Electr. Veh. J. 2012, 5, 173–181. [Google Scholar] [CrossRef] [Green Version]
- Shankar, R.; Marco, J.; Assadian, F. The Novel Application of Optimization and Charge Blended Energy Management Control for Component Downsizing within a Plug-in Hybrid Electric Vehicle. Energies 2012, 5, 4892–4923. [Google Scholar] [CrossRef]
- Geller, B.M.; Bradley, T.H. Analyzing Drive Cycles for Hybrid Electric Vehicle Simulation and Optimization. J. Mech. Des. 2015, 137, 041401. [Google Scholar] [CrossRef]
- Brady, J.; O’Mahony, M. Development of a driving cycle to evaluate the energy economy of electric vehicles in urban areas. Appl. Energy 2016, 177, 165–178. [Google Scholar] [CrossRef]
- Patil, C.; Naghshtabrizi, P.; Verma, R.; Tang, Z.; Smith, K.; Shi, Y. Optimal battery utilization over lifetime for parallel hybrid electric vehicle to maximize fuel economy. In Proceedings of the American Control Conference, Boston, MA, USA, 6–8 July 2016. [Google Scholar]
- Naranjo, W.; Camargo, L.E.M.; Pereda, J.E.; Cortes, C. Design of Electric Buses of Rapid Transit Using Hybrid Energy Storage and Local Traffic Parameters. IEEE Trans. Veh. Technol. 2017, 66, 5551–5563. [Google Scholar] [CrossRef]
- Zhang, F.; Guo, F.; Huang, H. A Study of Driving Cycle for Electric Special-purpose Vehicle in Beijing. Energy Procedia 2017, 105, 4884–4889. [Google Scholar] [CrossRef]
- Borlaug, B.; Holden, J.; Wood, E.; Lee, B.; Fink, J.; Agnew, S.; Lustbader, J. Estimating region-specific fuel economy in the United States from real-world driving cycles. Transp. Res. Part D Transp. Environ. 2020, 86, 102448. [Google Scholar] [CrossRef]
- Lee, H.; Lee, K. Comparative Evaluation of the Effect of Vehicle Parameters on Fuel Consumption under NEDC and WLTP. Energies 2020, 13, 4245. [Google Scholar] [CrossRef]
- Cubito, C.; Millo, F.; Boccardo, G.; Di Pierro, G.; Ciuffo, B.; Fontaras, G.; Serra, S.; Otura Garcia, M.; Trentadue, G. Impact of Different Driving Cycles and Operating Conditions on CO2 Emissions and Energy Management Strategies of a Euro-6 Hybrid Electric Vehicle. Energies 2017, 10, 1590. [Google Scholar] [CrossRef]
- Fontaras, G.; Zacharof, N.G.; Ciuffoo, B. Fuel consumption and CO2 emissions from passenger cars in Europe—Laboratory versus real-world emissions. Prog. Energy Combust. Sci. 2017, 60, 97–131. [Google Scholar] [CrossRef]
- Lee, T.K.; Filipi, Z.S. Synthesis of real-world driving cycles using stochastic process and statistical methodology. Int. J. Veh. Des. 2011, 57, 17–36. [Google Scholar] [CrossRef]
- Škugor, B.; Deur, J. Delivery vehicle fleet data collection, analysis and naturalistic driving cycles synthesis. Int. J. Innov. Sustain. Dev. 2016, 10, 19–39. [Google Scholar] [CrossRef]
- Liessner, R.; Dietermann, A.M.; Bäker, B.; Lüpkes, K. Derivation of real-world driving cycles corresponding to traffic situation and driving style on the basis of Markov models and cluster analyses. In Proceedings of the 6th Hybrid and Electric Vehicles Conference, London, UK, 2–3 November 2016. [Google Scholar]
- Esser, A.; Zeller, M.; Foulard, S.; Rinderknecht, S. Stochastic Synthesis of Representative and Multidimensional Driving Cycles. SAE Int. J. Alt. Power. 2018, 7, 263–272. [Google Scholar] [CrossRef]
- Peng, J.; Jiang, J.; Ding, F.; Tan, H. Development of Driving Cycle Construction for Hybrid Electric Bus: A Case Study in Zhengzhou, China. Sustainability 2020, 12, 7188. [Google Scholar] [CrossRef]
- Zeyu, C.; Qing, Z.; Jiahuan, L.; Jiangman, B. Optimization-based method to develop practical driving cycle for application in electric vehicle power management: A case study in Shenyang, China. Energy 2019, 186, 115766. [Google Scholar]
- Ho, S.; Wong, Y.; Chang, V.W. Developing Singapore Driving Cycle for passenger cars to estimate fuel consumption and vehicular emissions. Atmos. Environ. 2014, 97, 353–362. [Google Scholar] [CrossRef]
- Hereijgers, K.; Silvas, E.; Hofman, T.; Steinbuch, M. Effects of using Synthesized Driving Cycles on Vehicle Fuel Consumption. IFAC Pap. 2017, 50, 7505–7510. [Google Scholar] [CrossRef]
- Lee, T.K.; Filipi, Z. Real-World Driving Pattern Recognition for Adaptive HEV Supervisory Control: Based on Representative Driving Cycles in Midwestern US; SAE Technical Paper 2012-01-1020; SAE World Congress: Detroit, MI, USA, 2012. [Google Scholar]
- Topić, J.; Škugor, B.; Deur, J. Synthesis and Validation of Multidimensional Driving Cycles. SAE Int. J. Adv. Curr. Prac. Mobil. 2021, 3, 1558–1568. [Google Scholar]
- Topić, J.; Soldo, J.; Maletić, F.; Škugor, B.; Deur, J. Virtual Simulation of Electric Bus Fleets for City Bus Transport Electrification Planning. Energies 2020, 13, 3410. [Google Scholar] [CrossRef]
- Gao, D.W.; Mi, C.; Emadi, A. Modeling and Simulation of Electric and Hybrid Vehicles. Proc. IEEE 2007, 95, 729–745. [Google Scholar] [CrossRef]
- Zacepins, A.; Kalnins, E.; Kviesis, A.; Komasilovs, V. Usage of GPS Data for Real-time Public Transport Location Visualisation. In Proceedings of the 5th International Conference on Vehicle Technology and Intelligent Transport Systems, Crete, Greece, 3–5 May 2019. [Google Scholar]
- Silvas, E.; Hereijgers, K.; Peng, H.; Hofman, T.; Steinbuch, M. Synthesis of Realistic Driving Cycles with High Accuracy and Computational Speed, Including Slope Information. IEEE Trans. Veh. Technol. 2016, 65, 4118–4128. [Google Scholar] [CrossRef]
- Liu, Z.; Ivanco, A.; Filipi, Z.S. Naturalistic driving cycle synthesis by Markov chain of different orders. Int. J. Powertrains 2018, 6, 307–322. [Google Scholar] [CrossRef]
- Topić, J.; Škugor, B.; Deur, J. Synthesis and Feature Selection-Supported Validation of Multidimensional Driving Cycles. Sustainability 2021, 13, 4704. [Google Scholar] [CrossRef]
- Erdelić, T.; Carić, T. A Survey on the Electric Vehicle Routing Problem: Variants and Solution Approaches. J. Adv. Transp. 2019, 2019, 5075671. [Google Scholar] [CrossRef]
- Škugor, B.; Hrgetić, M.; Deur, J. GPS measurement-based road slope reconstruction with application to electric vehicle simulation and analysis. In Proceedings of the 8th Conference on Sustainable Development of Energy, Water and Environment Systems (SDEWES), Dubrovnik, Croatia, 27 September–2 October 2015. [Google Scholar]
- Gagniuc, P.A. Building the Stochastic Matrix. In Markov Chains: From Theory to Implementation and Experimentation, 1st ed.; John Wiley & Sons: New York, NY, USA, 2017; pp. 25–37. [Google Scholar]
- Topić, J.; Škugor, B.; Deur, J. Analysis of City Bus Driving Cycle Features for the Purpose of Multidimensional Driving Cycle Synthesis; SAE Technical Paper No. 2020-01-1288; SAE World Congress: Detroit, MI, USA, 2020. [Google Scholar]
- Topić, J.; Škugor, B.; Deur, J. Analysis of Markov Chain-based Methods for Synthesis of Driving Cycles of Different Dimensionality. In Proceedings of the 23rd IEEE International Conference on Intelligent Transportation Systems, Rhodes, Greece, 20–23 September 2020; pp. 893–900. [Google Scholar]
- Gamerman, D.; Lopes, H.F. Markov chains. In Markov Chain Monte Carlo: Stochastic Simulation for Bayesian Inference, 2nd ed.; Chapman & Hall/CRC: London, UK, 2006; pp. 113–136. [Google Scholar]
- Privault, N. Discrete-Time Markov Chains. In Understanding Markov Chains; Springer: Singapore, 2018; pp. 89–113. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mean Velocity Condition | Total Number | Relative Mean Velocity Residual Statistics, ε [%] | ||||
|---|---|---|---|---|---|---|
| Min | Median | Mean | Max | Std | ||
| Satisfied | 5740 (99.4%) | −5.0 | 0.28 | 0.19 | 5.0 | 2.9 |
| Unsatisfied | 37 (0.64%) | −13.3 | 9.8 | 8.7 | 23.3 | 10.6 |
| Case | Number of Generated Invalid Micro-Cycles per Single Valid Micro-Cycle | ||||
|---|---|---|---|---|---|
| Min | Median | Mean | Max | Std | |
| Stopping applies (3982 valid cycles in total) | 0 | 7 | 17.1 | 500 | 46.1 |
| Stopping does not apply (1795 valid cycles in total) | 0 | 8 | 20.7 | 500 | 53.5 |
| In total | 0 | 7 | 18.3 | 500 | 48.6 |
| Case | Total Number of Generated Micro-Cycles | ||||
|---|---|---|---|---|---|
| Valid | Not Valid | Total | |||
| Mean Velocity Condition | Velocity/Acceleration Boundary Condition | Combined Conditions | |||
| Stopping applies | 3982 (5.5%) | 68,228 (94.5%) | 0 | 0 | 72,210 |
| Stopping does not apply | 1795 (4.6%) | 35,061 (89.9%) | 199 (0.5%) | 1950 (5.0%) | 39,005 |
| In total | 5777 (5.2%) | 103,289 (92.9%) | 199 (0.2%) | 1950 (1.8%) | 111,215 |
| Case | Execution Time, * [ms] | ||||
|---|---|---|---|---|---|
| Min | Median | Mean | Max | Std | |
| Stopping applies | 3.9 | 32.9 | 50.0 | 237.5 | 49.2 |
| Stopping does not apply | 0.3 | 3.8 | 6.3 | 37.89 | 6.8 |
| In total | 0.3 | 15.1 | 35.4 | 237.5 | 45.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dabčević, Z.; Škugor, B.; Topić, J.; Deur, J. Synthesis of Driving Cycles Based on Low-Sampling-Rate Vehicle-Tracking Data and Markov Chain Methodology. Energies 2022, 15, 4108. https://doi.org/10.3390/en15114108
Dabčević Z, Škugor B, Topić J, Deur J. Synthesis of Driving Cycles Based on Low-Sampling-Rate Vehicle-Tracking Data and Markov Chain Methodology. Energies. 2022; 15(11):4108. https://doi.org/10.3390/en15114108
Chicago/Turabian StyleDabčević, Zvonimir, Branimir Škugor, Jakov Topić, and Joško Deur. 2022. "Synthesis of Driving Cycles Based on Low-Sampling-Rate Vehicle-Tracking Data and Markov Chain Methodology" Energies 15, no. 11: 4108. https://doi.org/10.3390/en15114108
APA StyleDabčević, Z., Škugor, B., Topić, J., & Deur, J. (2022). Synthesis of Driving Cycles Based on Low-Sampling-Rate Vehicle-Tracking Data and Markov Chain Methodology. Energies, 15(11), 4108. https://doi.org/10.3390/en15114108