
Evaluation Method of Naturalistic Driving Behaviour for Shared-Electrical Car


Abstract
:1. Introduction
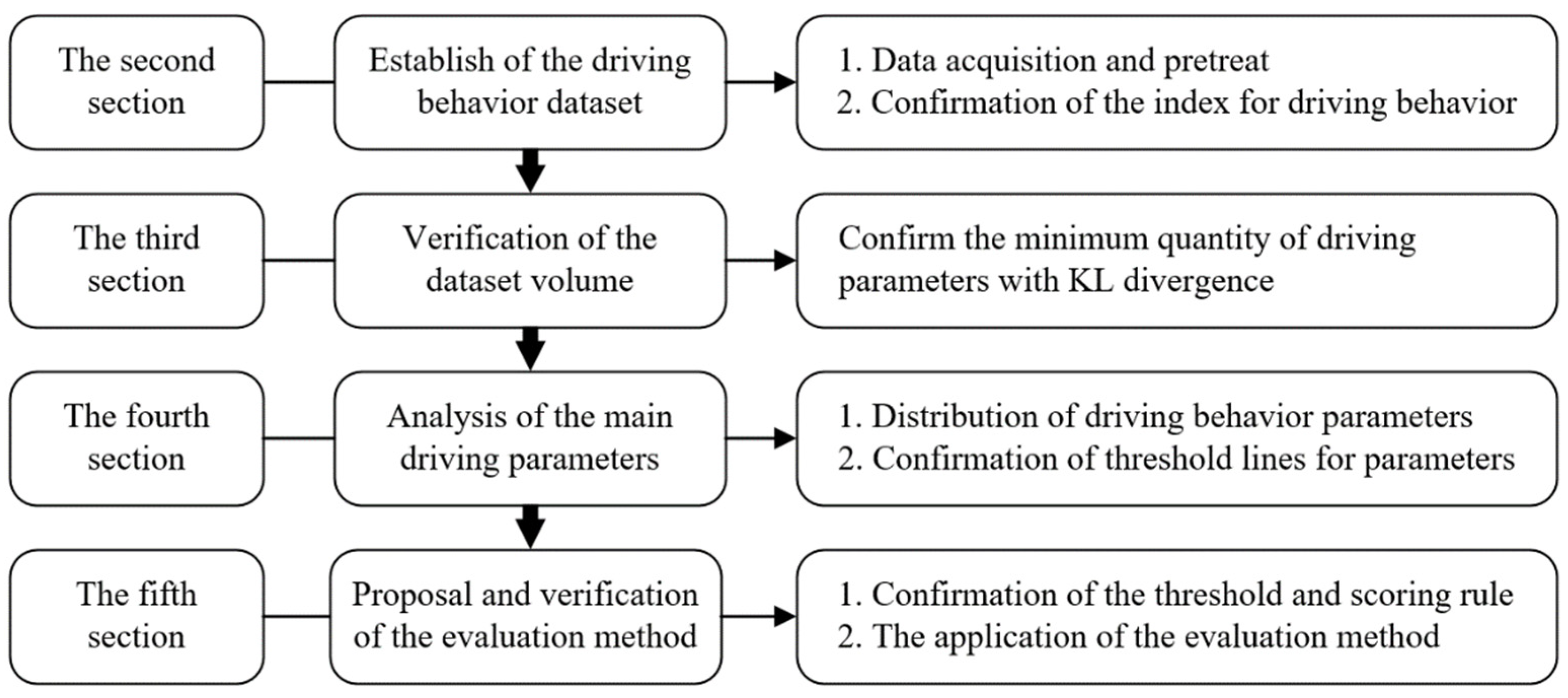
2. Data Acquisition and Treatment
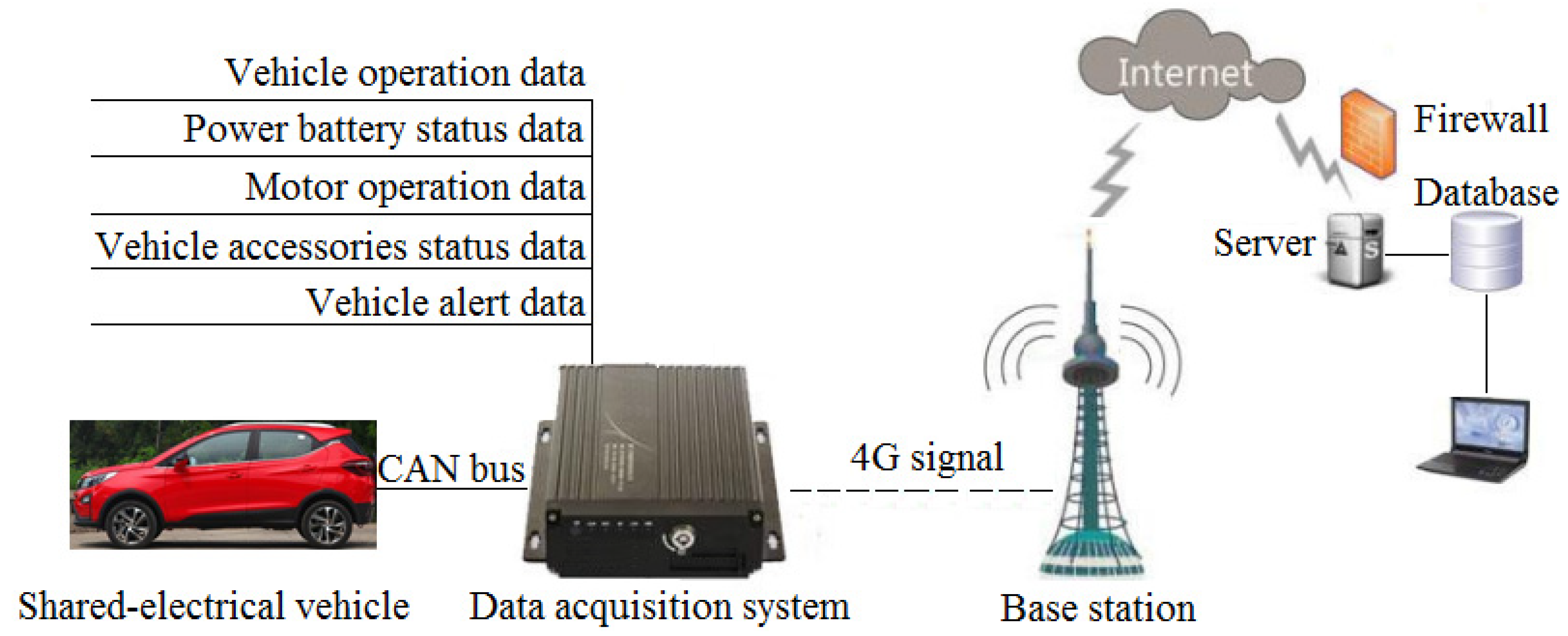
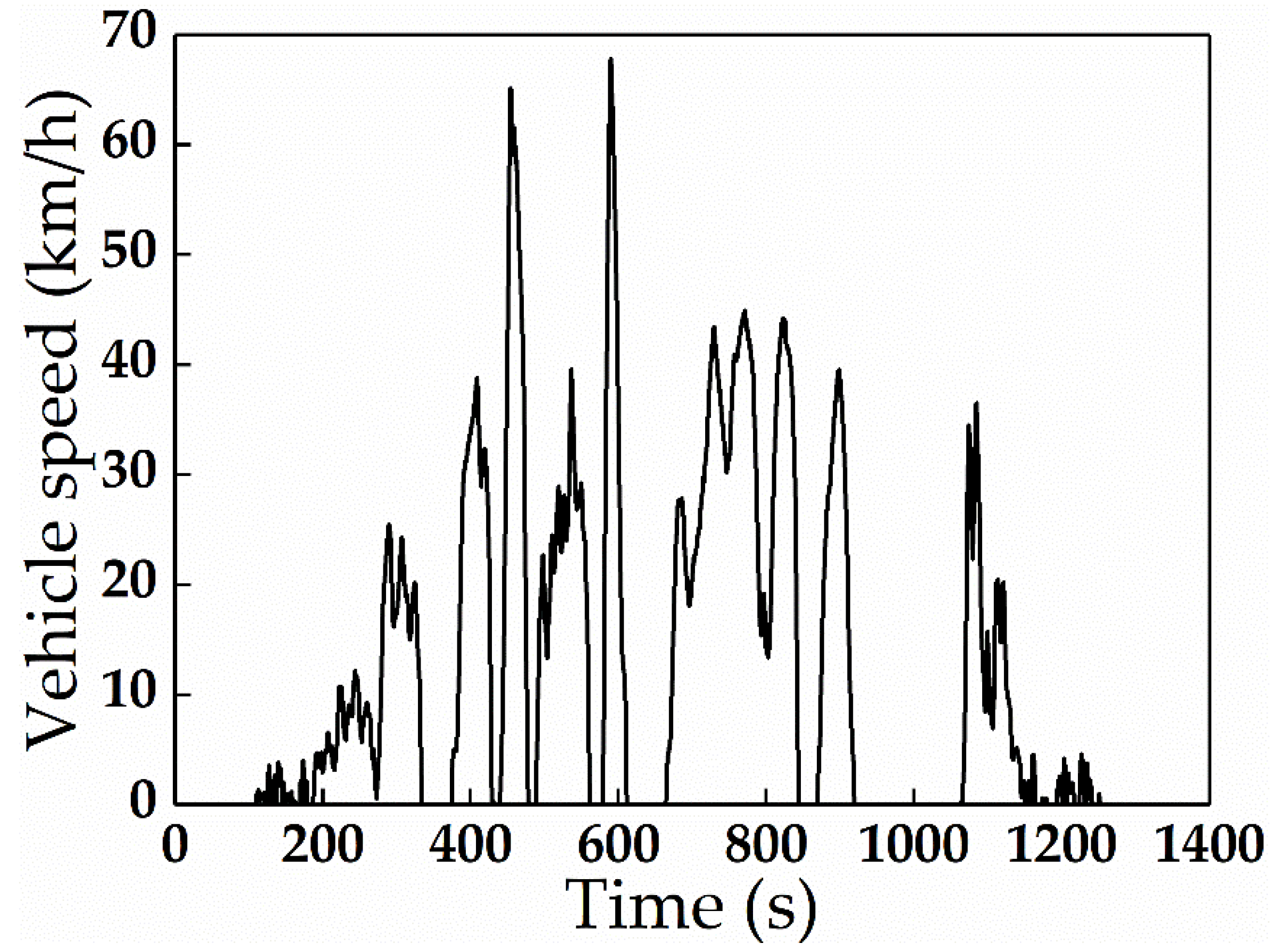
2.1. Data Acquisition
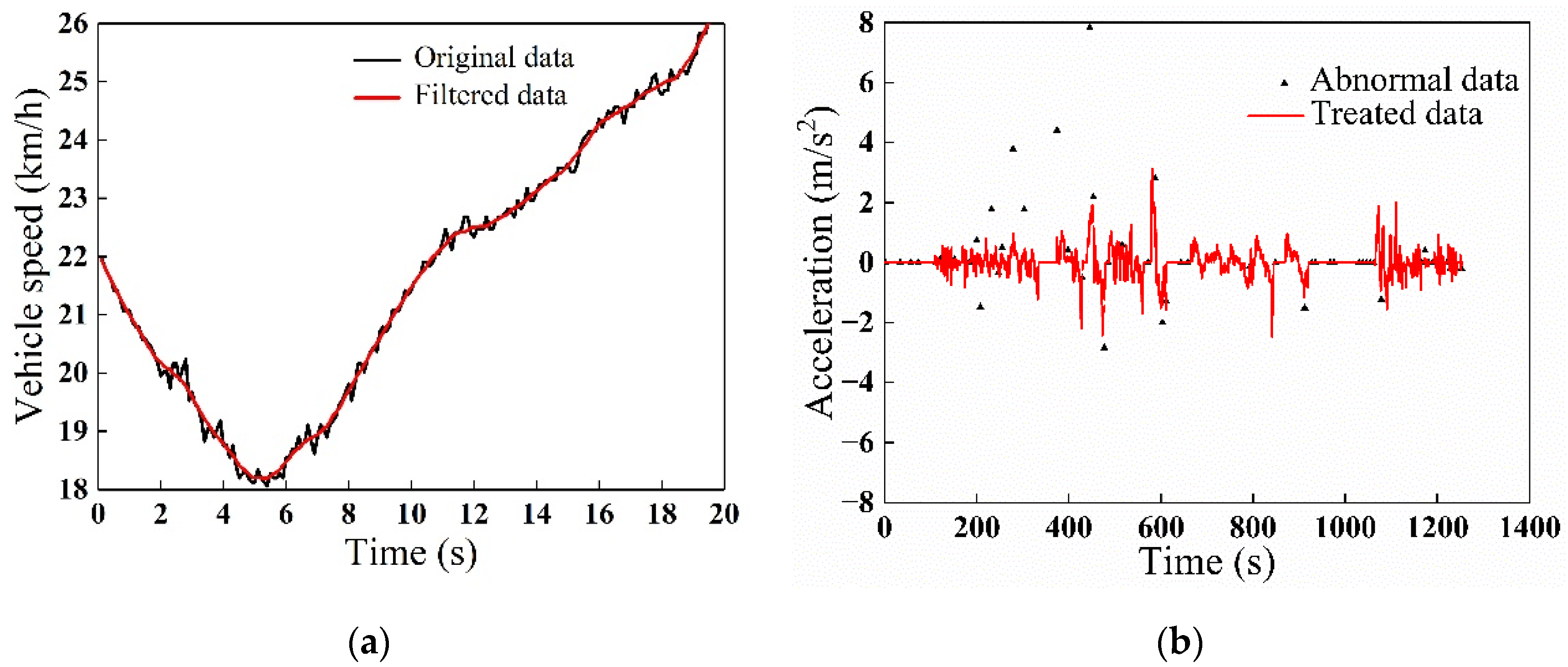
2.2. Data Treatment
2.3. The Indexes for Driving Behaviour
3. Quantity Estimation of Driving Behaviour Data
4. Study on the Relationship between Different Driving Behaviour Parameters
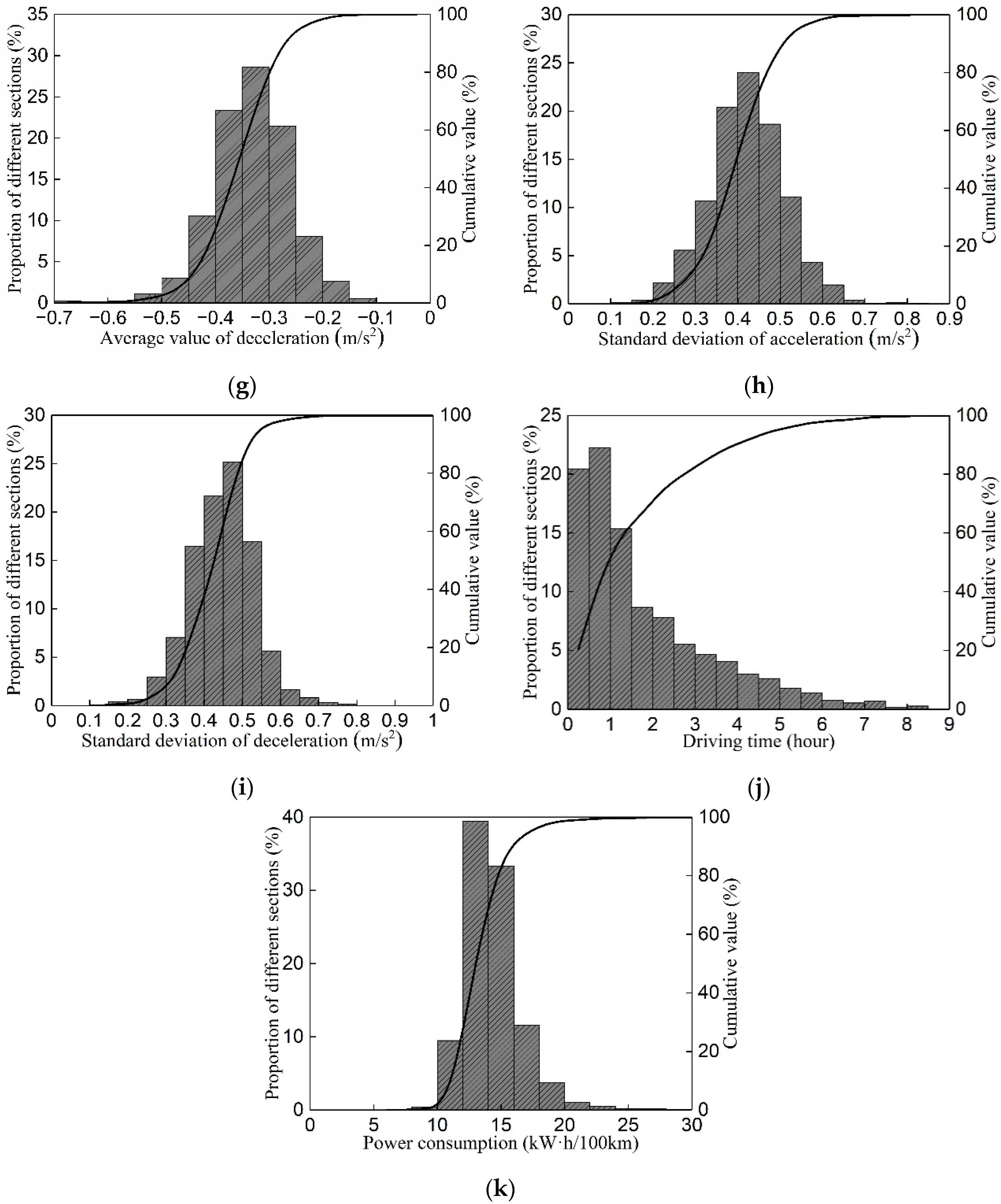
4.1. Statistical Characteristics of the Main Driving Behaviour Parameters
4.2. Statistical Characteristics of Parameters at Different Vehicle Speed
5. Evaluation Method of Driving Behaviour
5.1. Confirmation of Weight and Scoring Rule
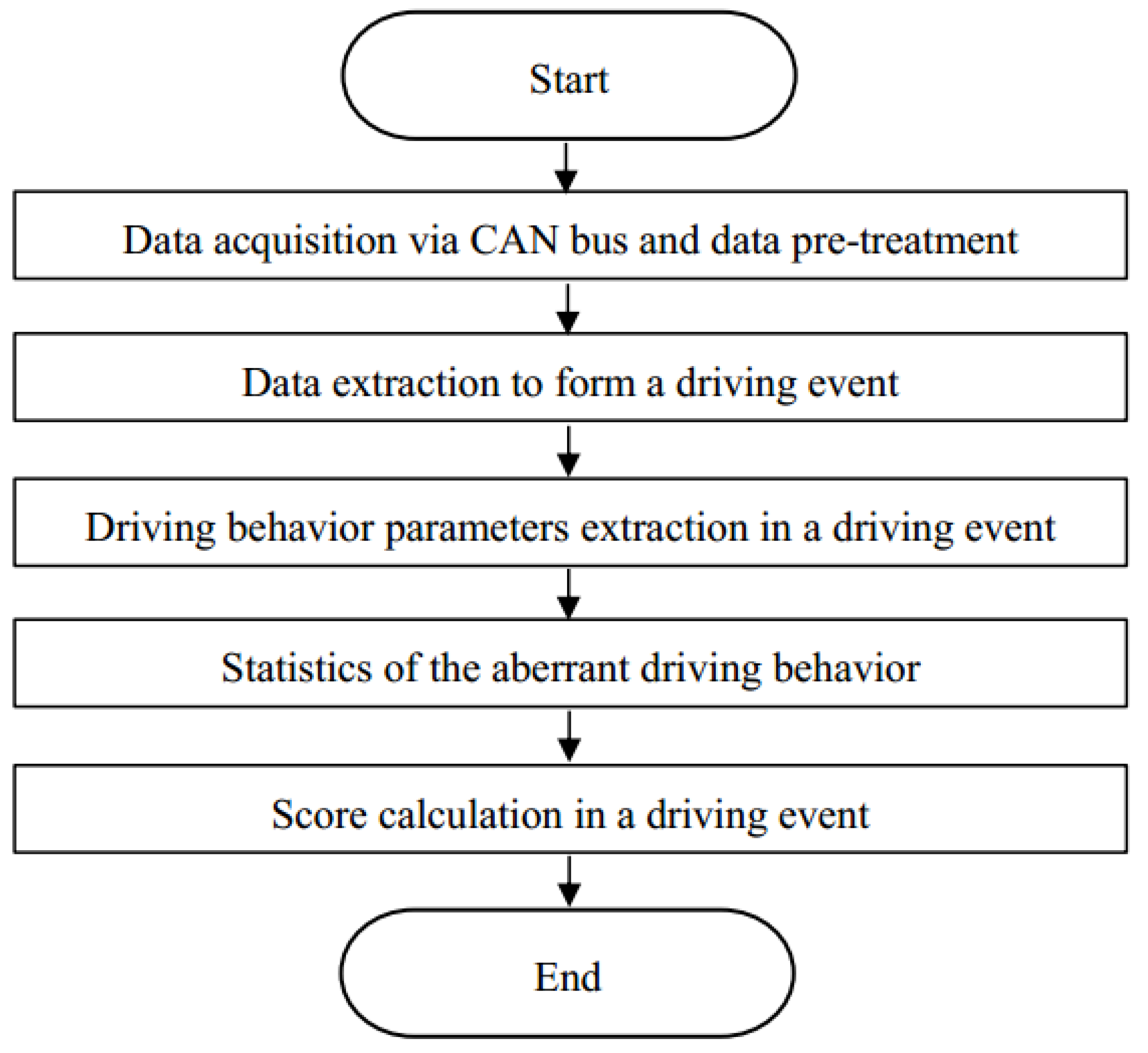
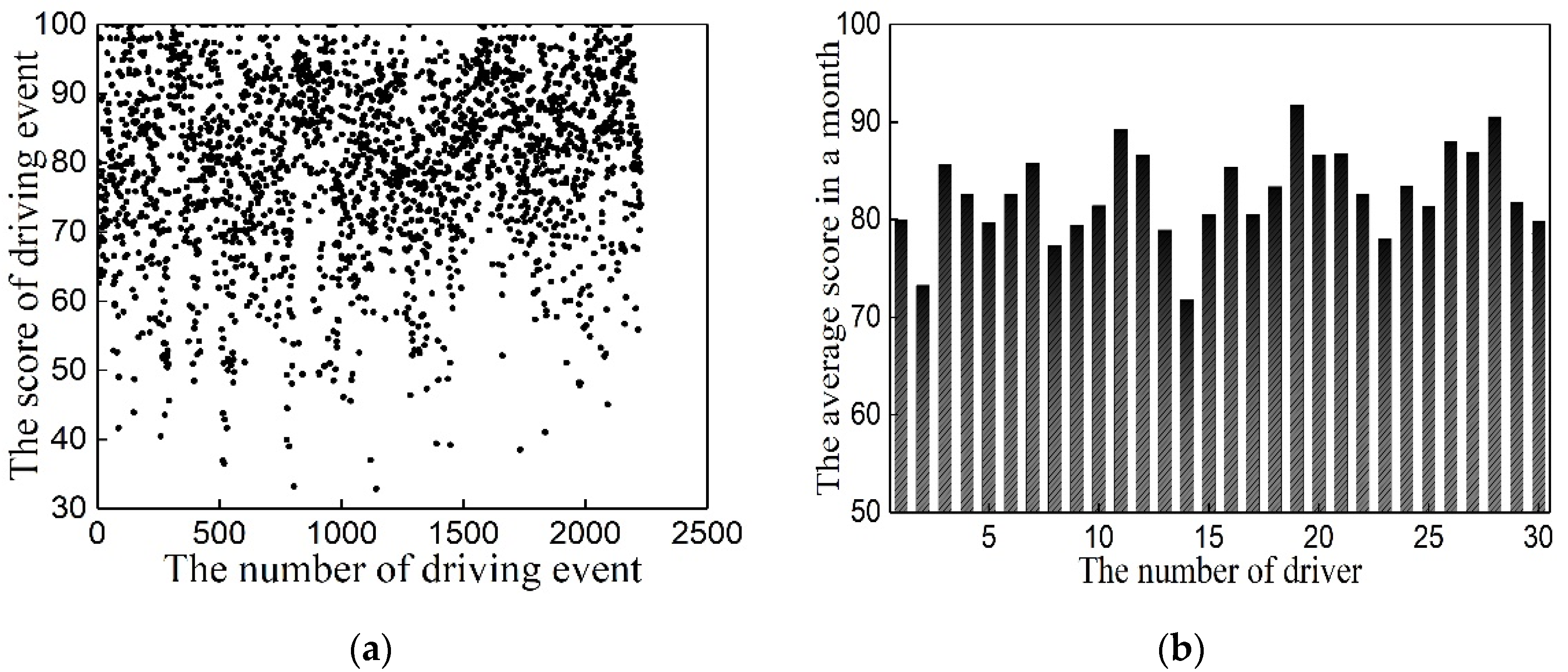
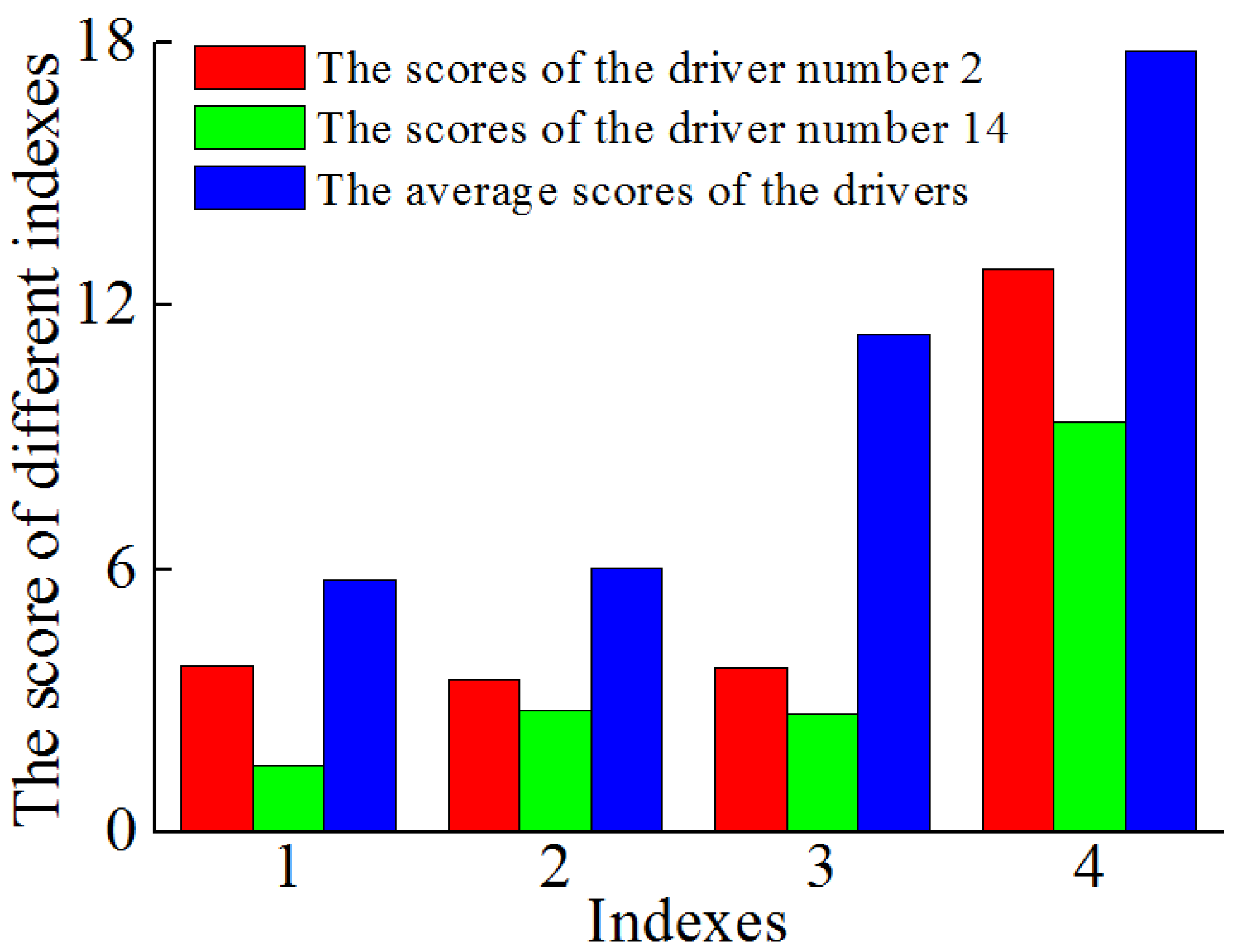
5.2. Proposed Driving Behaviour Evaluation Method
6. Conclusions
- The NDS data were collected from the OBD−II interface via CAN bus with the rate of 10 Hz. This sampling frequency satisfies the requirement of transient process analysis. The sliding-window averaging filter and the box diagram method were used to improve the data quality. Eleven indexes were selected to evaluate the driving behaviour, including vehicle running data, driver operation data and power consumption of the vehicles.
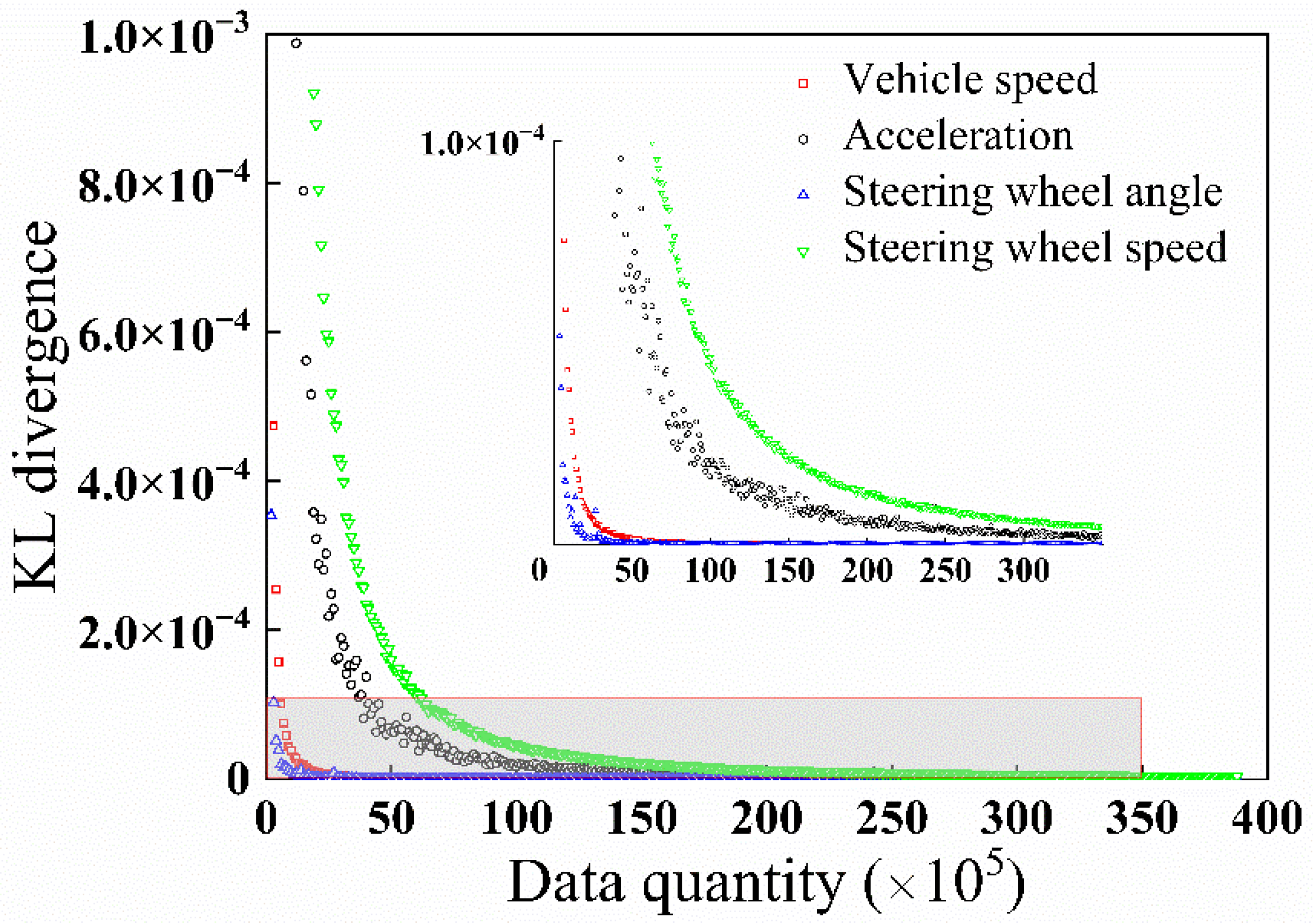
- KL divergence was applied to confirm the appropriate data quantity for the driving behaviour analysis. The result showed that the minimum data quantity for vehicle speed, acceleration, steering wheel angle and steering wheel speed were 20 × 105, 63 × 105, 10 × 105, 231 × 105, respectively, with the variation value of KL lower than 1 × 105.
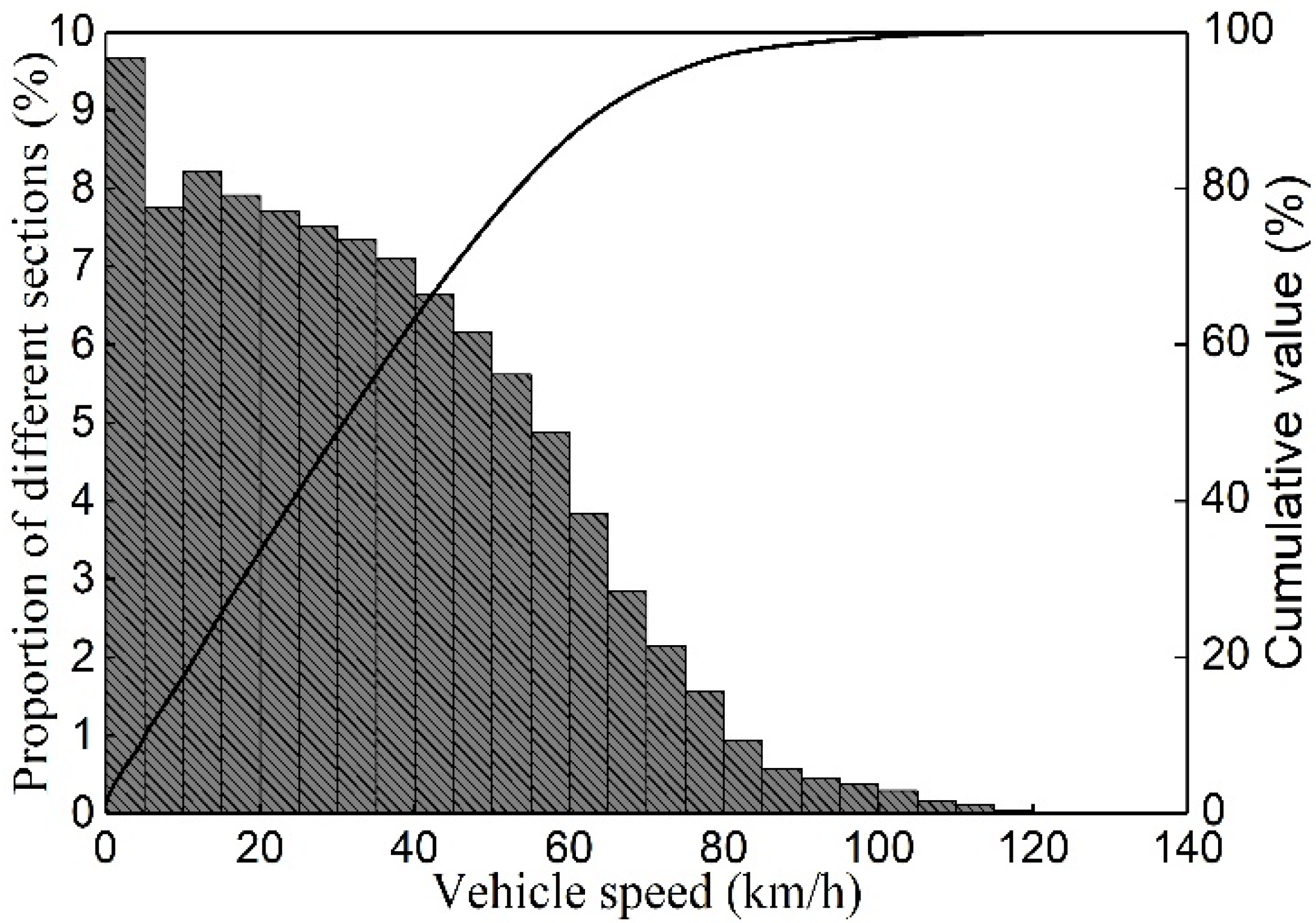
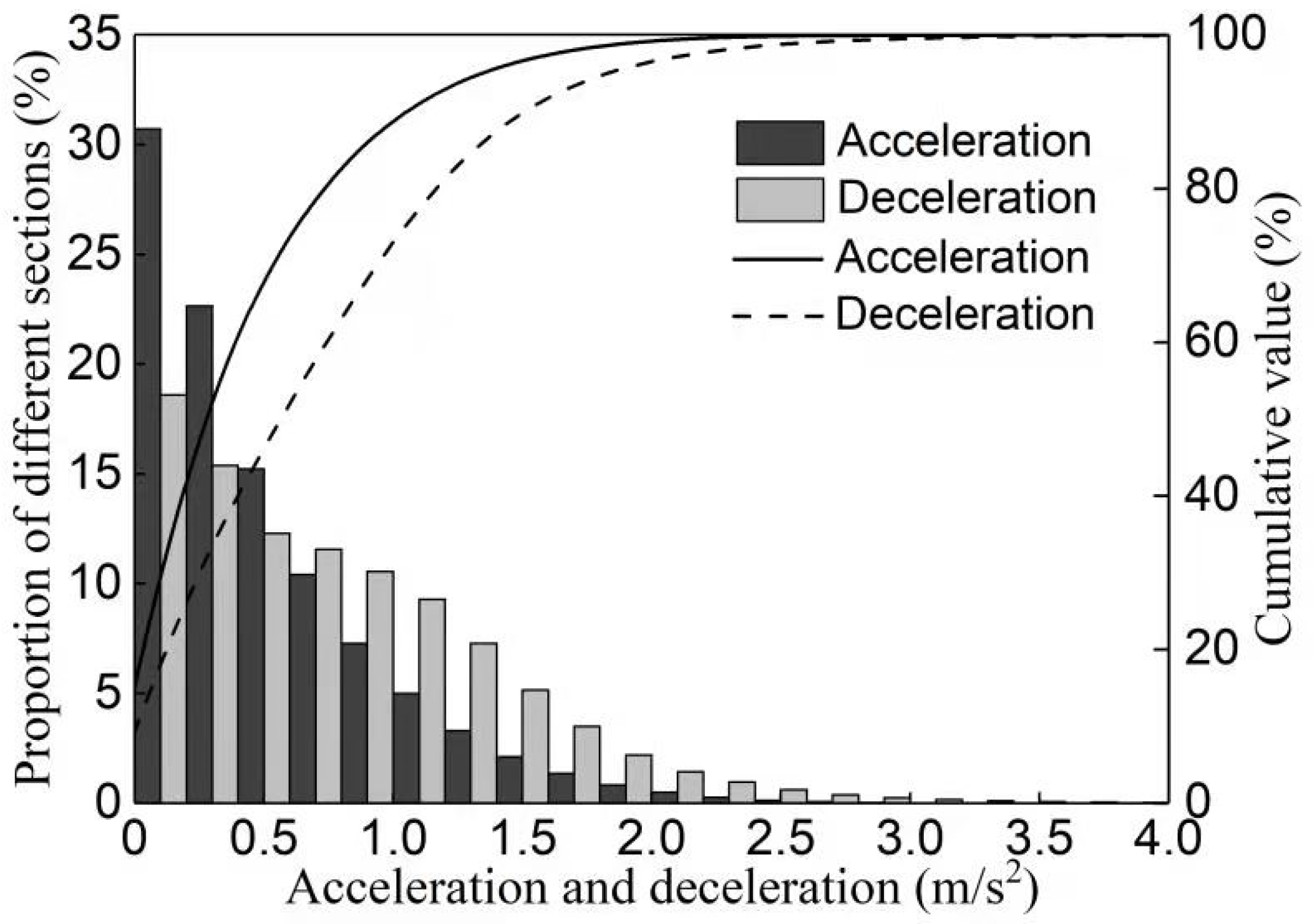
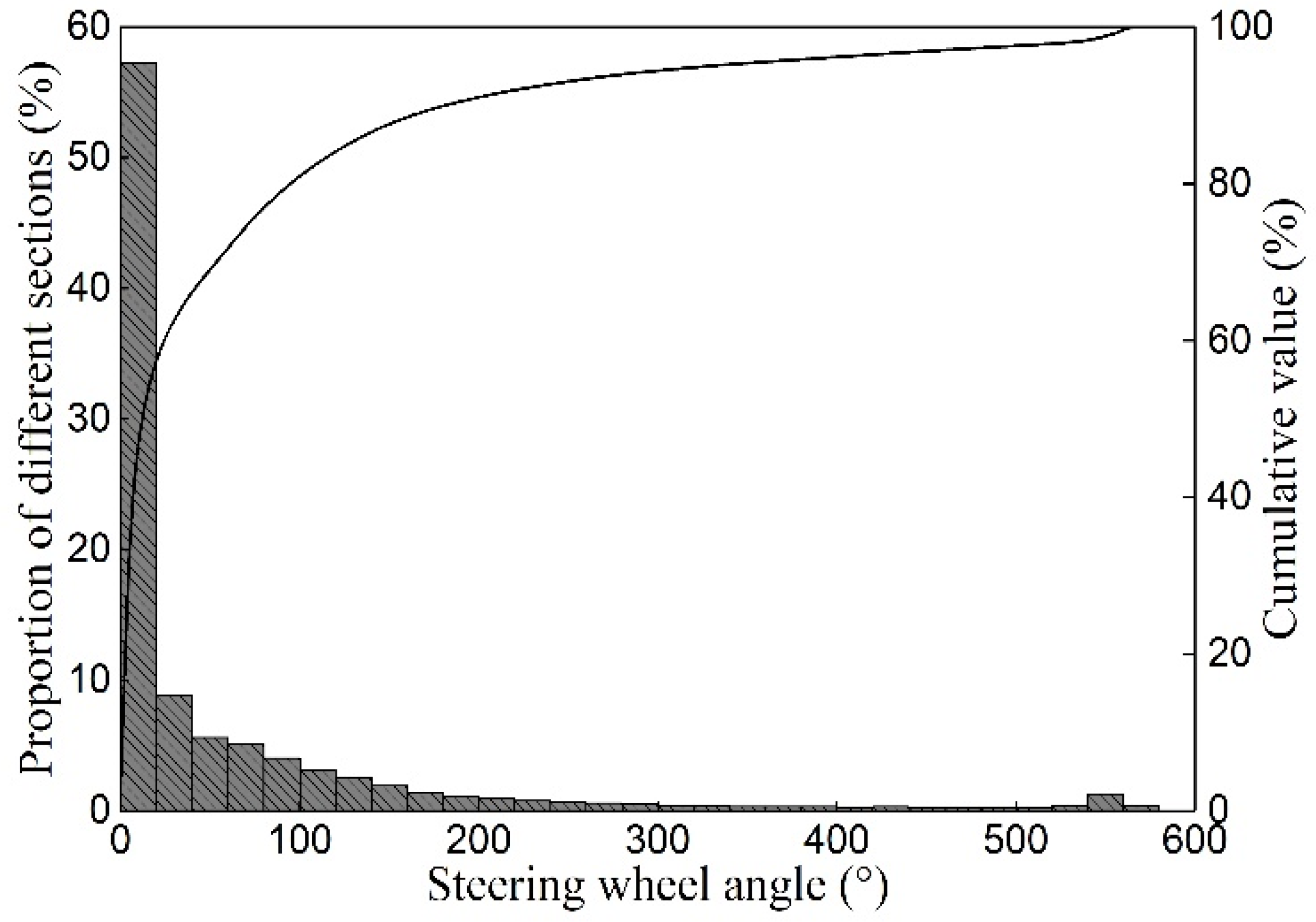
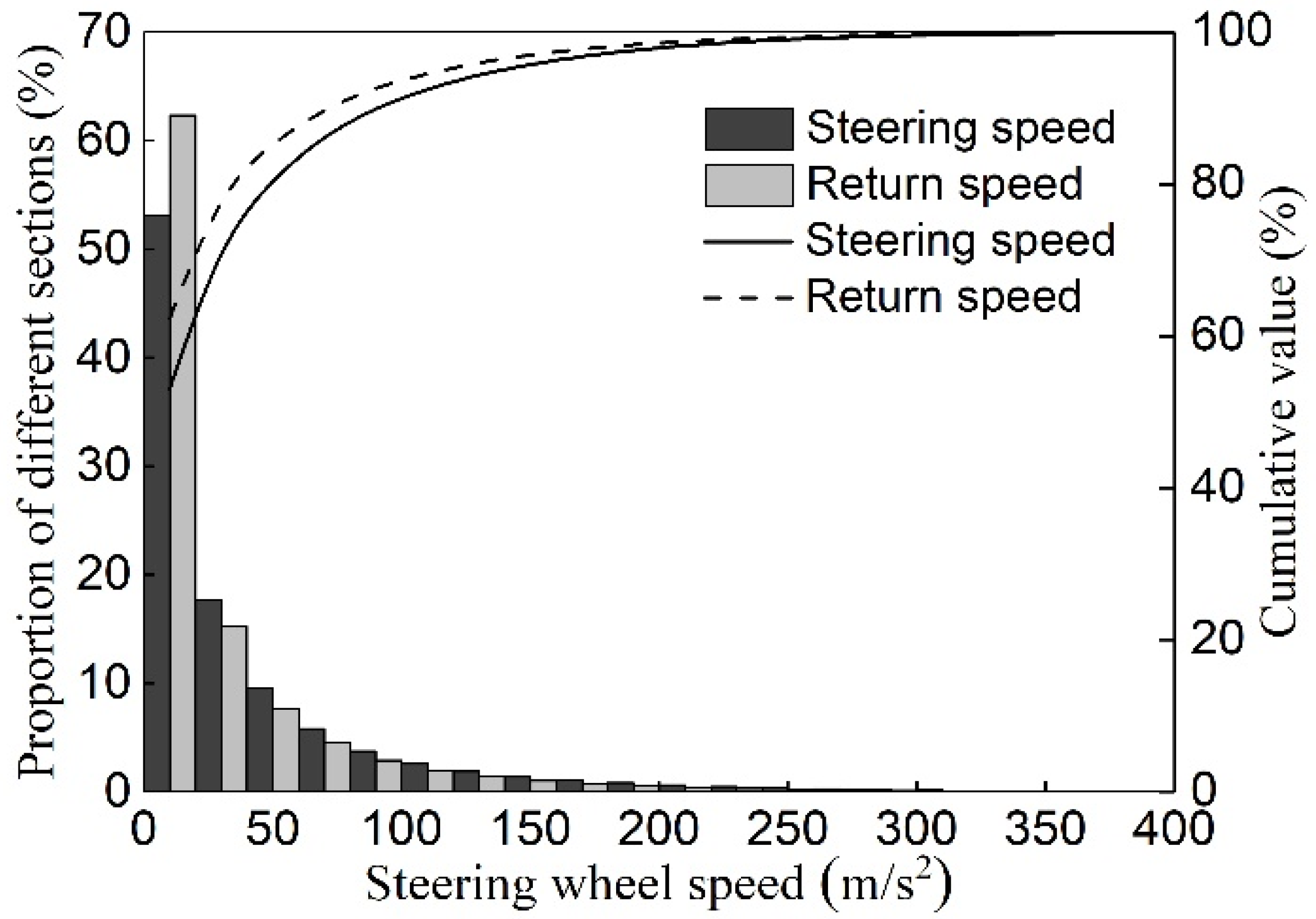
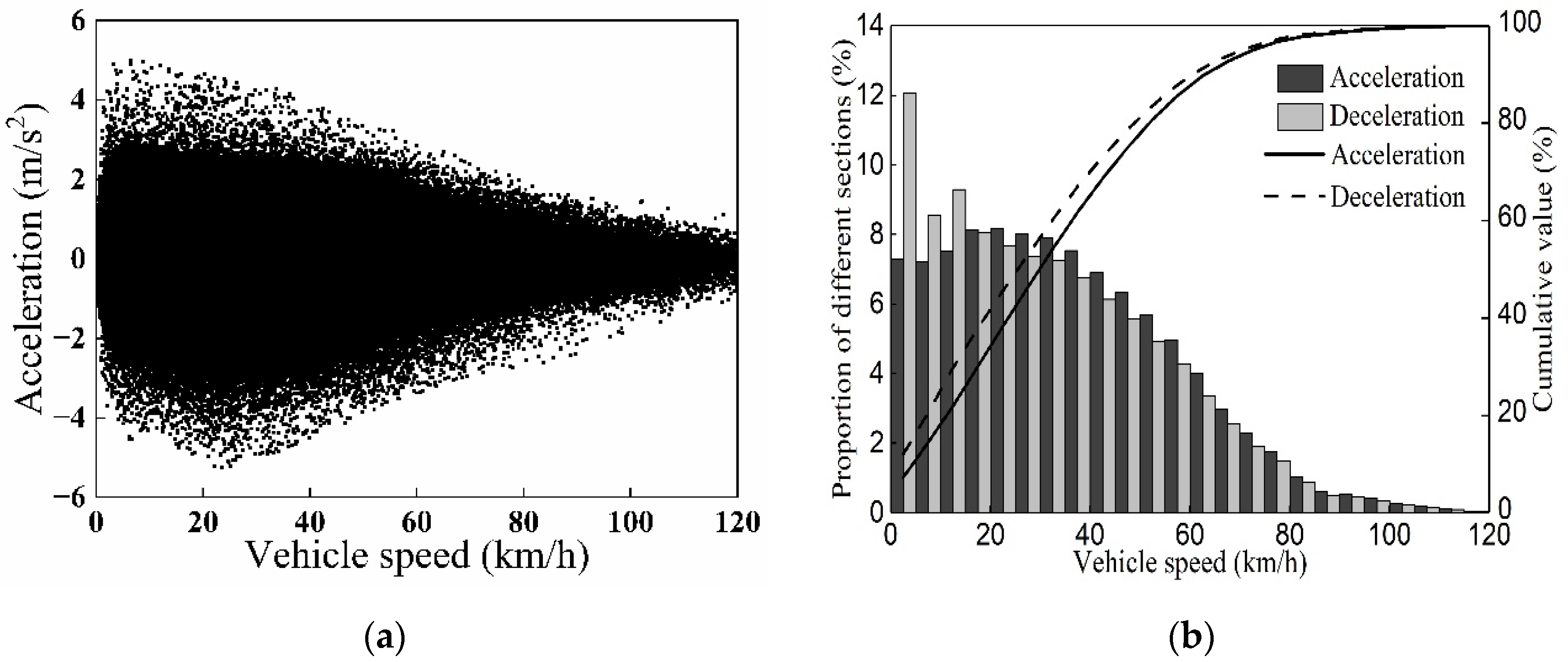
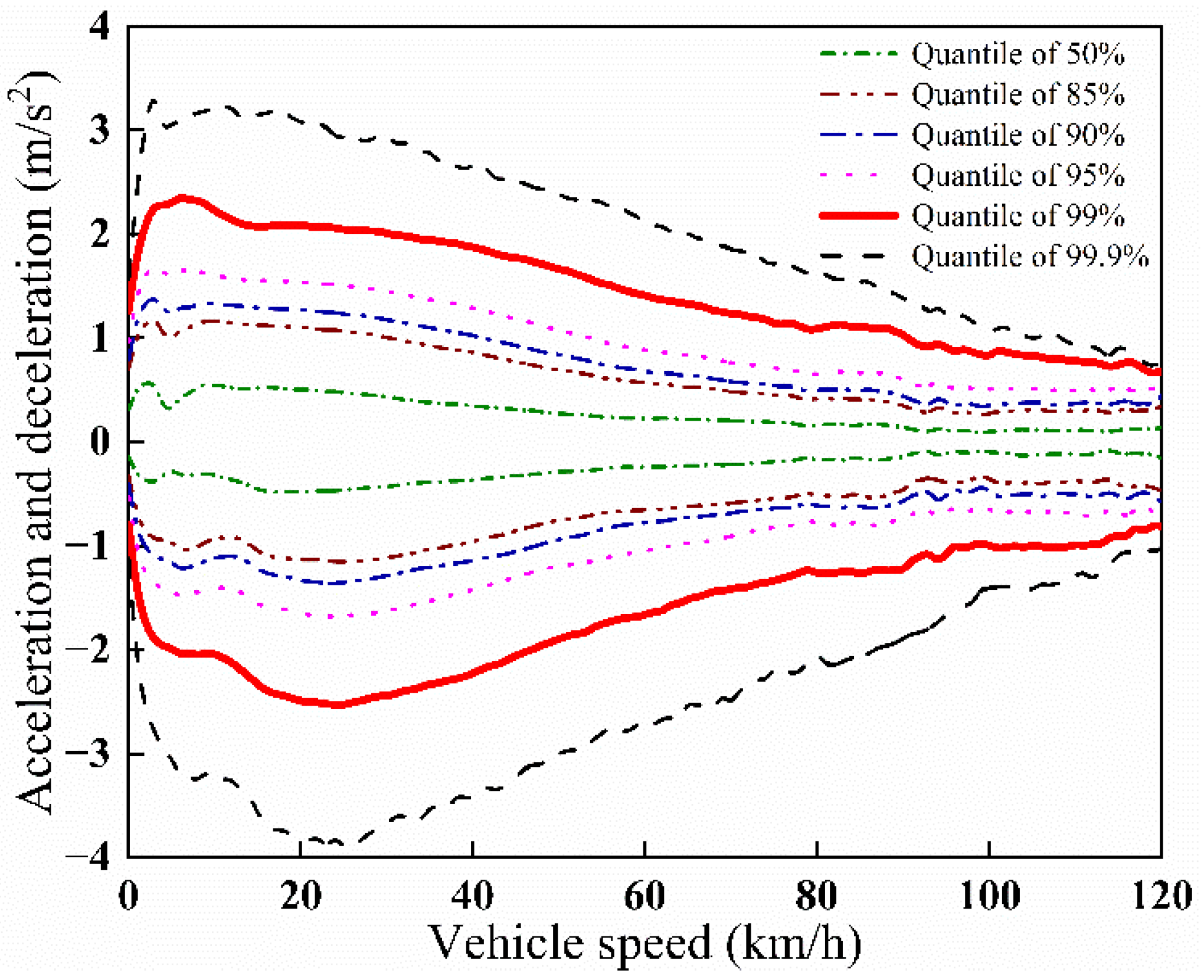
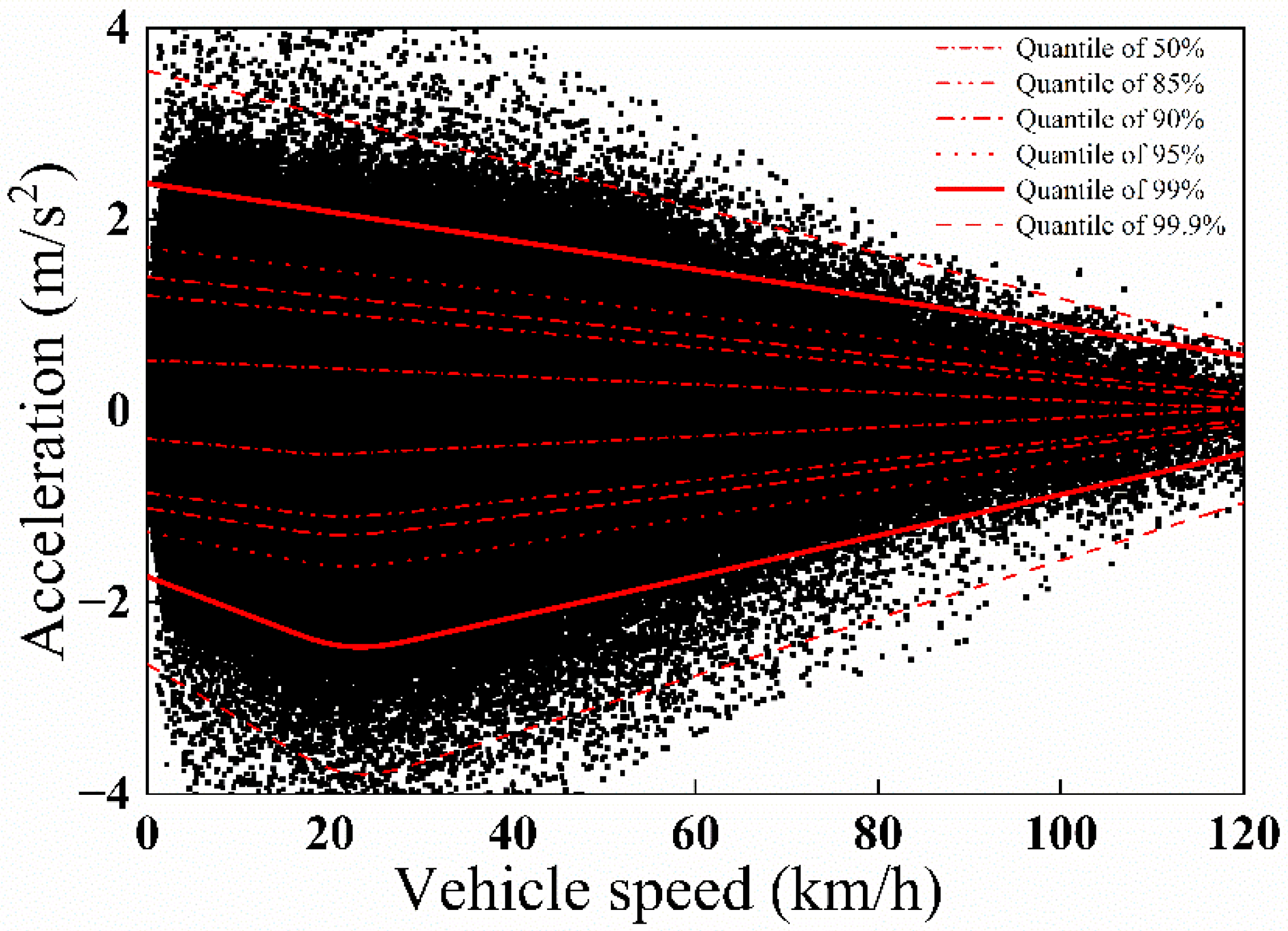
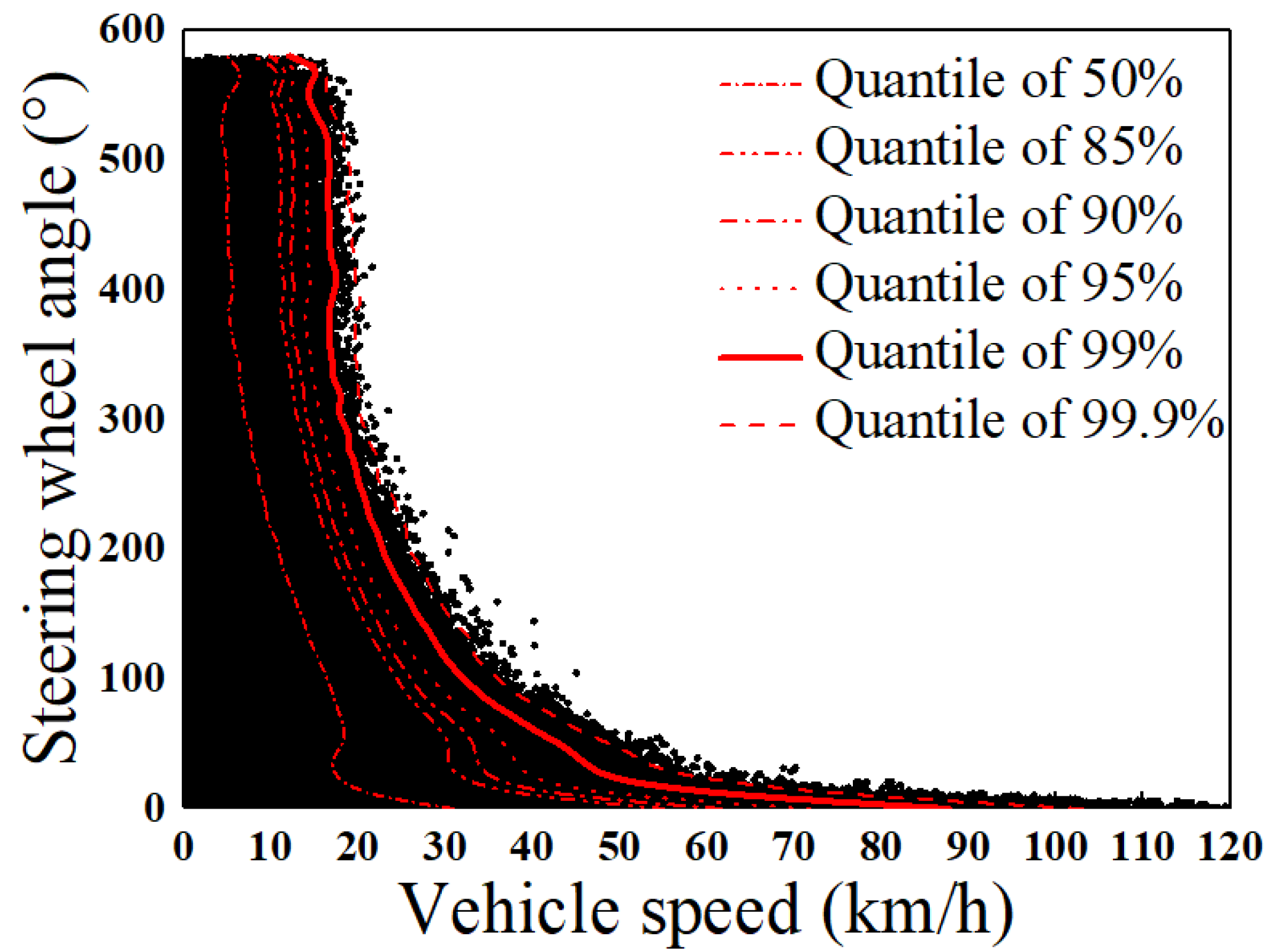
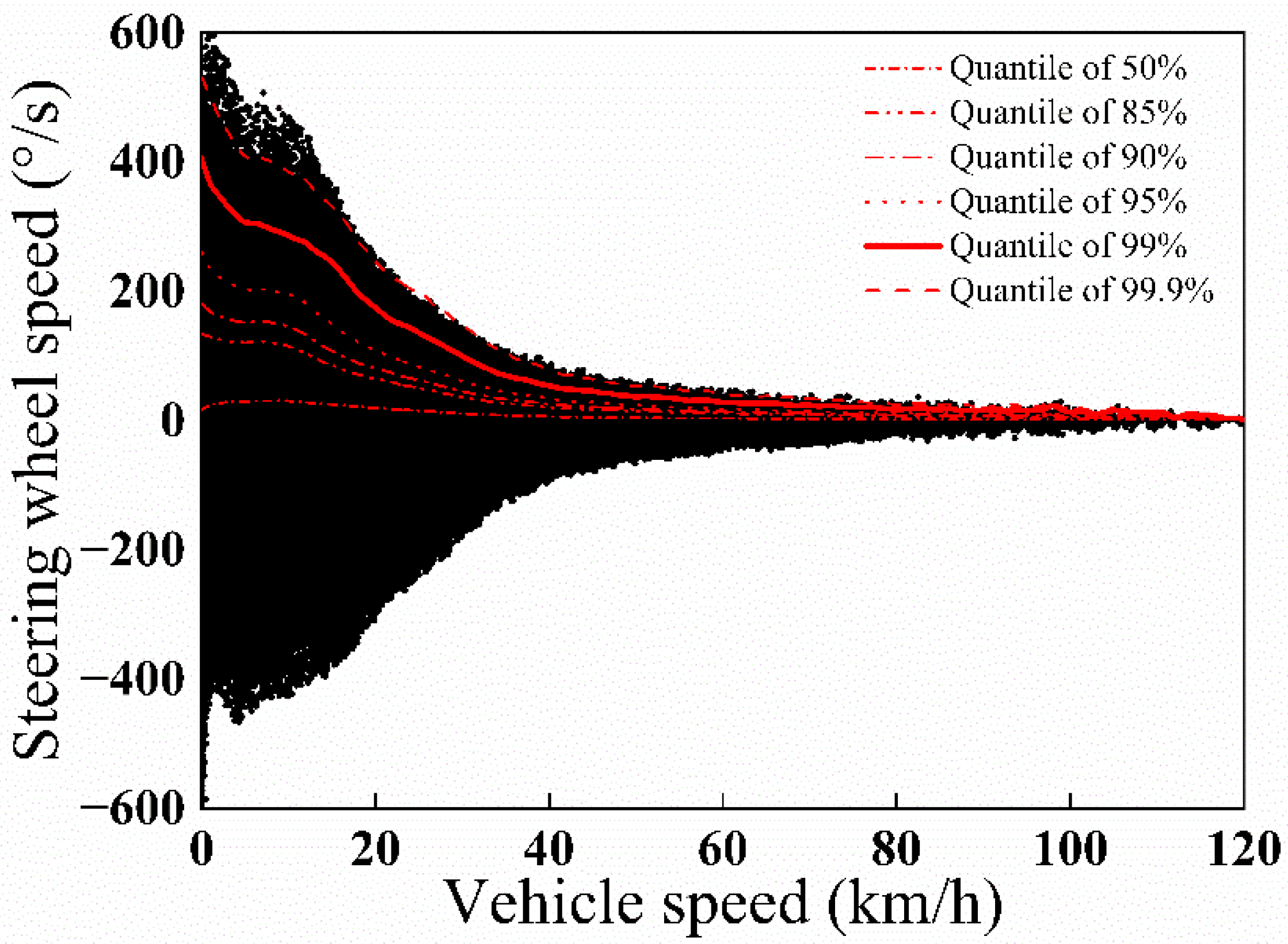
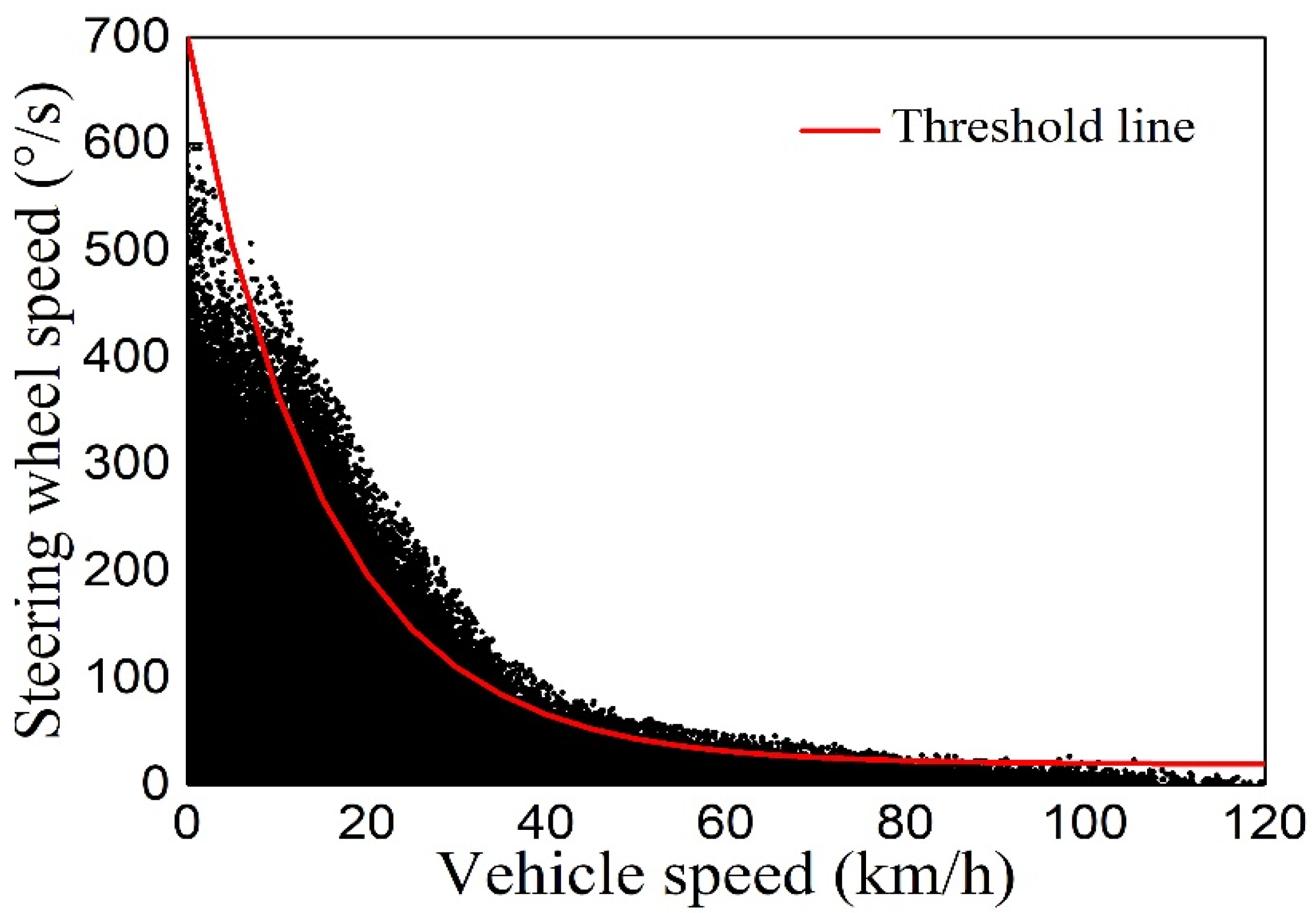
- The changing trend of acceleration and deceleration, steering wheel angle and steering wheel speed versus vehicle speed were compared. Based on the distribution characteristics, the thresholds of aberrant driving were determined in correlation with vehicle speed to enhance the recognition accuracy of the aberrant driving behaviour. The thresholds can be used to evaluate the aberrant driving behaviour.
- The weights for the 11 indexes were obtained by combining the AHP and EWM methods. The scoring rules of the 11 indexes were confirmed based on the distribution of the indexes. An evaluation method of driving behaviour was proposed and verified according to the driving behaviour data of the car-hiring driver.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AHP | Analytic Hierarchy Process |
| CAN | Controller Area Network |
| ECU | Electronic Control Units |
| EWM | Entropy Weight Method |
| GPS | Global Positioning System |
| ICE | Internal Combustion Engine |
| IMU | Inertial Measurement Unit |
| KL | Kullback–Leibler |
| NDS | Naturalistic Driving Study |
| OBD | On-Board Diagnostics |
References
- Singh, H.; Kathuria, A. Analyzing driver behavior under naturalistic driving conditions: A review. Accid. Anal. Prev. 2021, 150, 105908. [Google Scholar] [CrossRef] [PubMed]
- Singh, S. Critical Reasons for Crashes Investigated in the National Motor Vehicle Crash Causation Survey; National Center for Statistics and Analysis: Washington, DC, USA, 2015.
- Tanvir, S.; Chase, R.T.; Roupahil, N.M. Development and analysis of eco-driving metrics for naturalistic instrumented vehicles. J. Intell. Transp. Syst. 2021, 25, 235–248. [Google Scholar] [CrossRef] [Green Version]
- Ersan, Ö.; Üzümcüoğlu, Y.; Azık, D.; Fındık, G.; Kaçan, B.; Solmazer, G.; Özkan, T.; Lajunen, T.; Öz, B.; Pashkevich, A.; et al. The relationship between self and other in aggressive driving and driver behaviors across countries. Transp. Res. Part F Traffic Psychol. Behav. 2019, 66, 122–138. [Google Scholar] [CrossRef]
- Deng, Z.; Chu, D.; Wu, C.; He, Y.; Cui, J. Curve safe speed model considering driving style based on driver behaviour questionnaire. Transp. Res. Part F Traffic Psychol. Behav. 2019, 65, 536–547. [Google Scholar] [CrossRef]
- Han, H.; Kim, S.; Choi, J.; Park, H.; Yang, J.H.; Kim, J. Driver’s avoidance characteristics to hazardous situations: A driving simulator study. Transp. Res. Part F Traffic Psychol. Behav. 2021, 81, 522–539. [Google Scholar] [CrossRef]
- Papazikou, E.; Thomas, P.; Quddus, M. Developing personalised braking and steering thresholds for driver support systems from SHRP2 NDS data. Accid. Anal. Prev. 2021, 160, 106310. [Google Scholar] [CrossRef]
- Akamatsu, M.; Green, P.; Bengler, K. Automotive technology and human factors research: Past, present, and future. Int. J. Veh. Technol. 2013, 2013, 1–27. [Google Scholar] [CrossRef]
- Precht, L.; Keinath, A.; Krems, J.F. Effects of driving anger on driver behavior—Results from naturalistic driving data. Transp. Res. Part F Traffic Psychol. Behav. 2017, 45, 75–92. [Google Scholar] [CrossRef]
- Ellison, A.B.; Greaves, S.P.; Bliemer, M.C.J. Driver behaviour profiles for road safety analysis. Accid. Anal. Prev. 2015, 76, 118–132. [Google Scholar] [CrossRef]
- Shridhar Bokare, P.; Kumar Maurya, A. Study of effect of speed, acceleration and deceleration of small petrol car on its tail pipe emission. Int. J. Traffic Transp. Eng. 2013, 3, 465–478. [Google Scholar] [CrossRef] [Green Version]
- Sun, Q.; Xia, J.; Nadarajah, N.; Falkmer, T.; Foster, J.; Lee, H. Assessing drivers’ visual-motor coordination using eye tracking, GNSS and GIS: A spatial turn in driving psychology. J. Spat. Sci. 2016, 61, 299–316. [Google Scholar] [CrossRef]
- Sheykhfard, A.; Haghighi, F. Performance analysis of urban drivers encountering pedestrian. Transp. Res. Part F Traffic Psychol. Behav. 2019, 62, 160–174. [Google Scholar] [CrossRef]
- Bokare, P.S.; Maurya, A.K. Acceleration-deceleration behaviour of various vehicle types. Transp. Res. Procedia 2017, 25, 4733–4749. [Google Scholar] [CrossRef]
- Chen, R.; Kusano, K.D.; Gabler, H.C. Driver behavior during overtaking maneuvers from the 100-car naturalistic driving study. Traffic Inj. Prev. 2015, 16, S176–S181. [Google Scholar] [CrossRef]
- Mahapatra, G.; Maurya, A.K. Study of vehicles lateral movement in non-lane discipline traffic stream on a straight road. Procedia Soc. Behav. Sci. 2013, 104, 352–359. [Google Scholar] [CrossRef] [Green Version]
- Papadimitriou, E.; Argyropoulou, A.; Tselentis, D.I.; Yannis, G. Analysis of driver behaviour through smartphone data: The case of mobile phone use while driving. Saf. Sci. 2019, 119, 91–97. [Google Scholar] [CrossRef]
- Saleh, K.; Hossny, M.; Nahavandi, S. Driving behavior classification based on sensor data fusion using LSTM recurrent neural networks. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017. [Google Scholar]
- Sangster, J.; Rakha, H.; Du, J. Application of naturalistic driving data to modeling of driver car-following behavior. Transp. Res. Rec. 2013, 2390, 20–33. [Google Scholar] [CrossRef]
- Jachimczyk, B.; Dziak, D.; Czapla, J.; Damps, P.; Kulesza, W. IoT on-board system for driving style assessment. Sensors 2018, 18, 1233. [Google Scholar] [CrossRef] [Green Version]
- Mayhew, D.R.; Simpson, H.M. The safety value of driver education and training. Inj. Prev. J. Int. Soc. Child Adolesc. Inj. Prev. 2002, 8 (Suppl. 2), ii3–ii8. [Google Scholar]
- Zhao, Y.; Yamamoto, T.; Morikawa, T. An analysis on older driver’s driving behavior by GPS tracking data: Road selection, left/right turn, and driving speed. J. Traffic Transp. Eng. 2018, 5, 56–65. [Google Scholar] [CrossRef]
- Feng, F.; Bao, S.; Sayer, J.R.; Flannagan, C.; Manser, M.; Wunderlich, R. Can vehicle longitudinal jerk be used to identify aggressive drivers? An examination using naturalistic driving data. Accid. Anal. Prev. 2017, 104, 125–136. [Google Scholar] [CrossRef] [PubMed]
- Das, A.; Ghasemzadeh, A.; Ahmed, M.M. Analyzing the effect of fog weather conditions on driver lane-keeping performance using the SHRP2 naturalistic driving study data. J. Saf. Res. 2019, 68, 71–80. [Google Scholar] [CrossRef] [PubMed]
- Kong, X.; Das, S.; Jha, K.; Zhang, Y. Understanding speeding behavior from naturalistic driving data: Applying classification based association rule mining. Accid. Anal. Prev. 2020, 144, 105620. [Google Scholar] [CrossRef] [PubMed]
- Morgenstern, T.; Schott, L.; Krems, J.F. Do drivers reduce their speed when texting on highways? A replication study using European naturalistic driving data. Saf. Sci. 2020, 128, 104740. [Google Scholar] [CrossRef]
- Hallmark, S.L.; Tyner, S.; Oneyear, N.; Carney, C.; McGehee, D. Evaluation of driving behavior on rural 2-lane curves using the SHRP 2 naturalistic driving study data. J. Saf. Res. 2015, 54, 17.e1–27. [Google Scholar] [CrossRef] [Green Version]
- Ji, S.; Chen, Q.; Shu, M.; Tian, G.; Liao, B.; Lv, C.; Li, M.; Lan, X.; Cheng, Y. Influence of operation management on fuel consumption of coach fleet. Energy 2020, 203, 117853. [Google Scholar] [CrossRef]
- Sagberg, F.; Selpi; Bianchi Piccinini, G.F.; Engström, J. A review of research on driving styles and road safety. Hum. Factors 2015, 57, 1248–1275. [Google Scholar] [CrossRef]
- Wang, W.; Liu, C.; Zhao, D. How much data is enough? A statistical approach with case study on longitudinal driving behavior. IEEE Trans. Intell. Veh. 2017, 2, 85–98. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z. Research on Vehicle Insurance Pricing Based on UBI Driving Behaviour Score. Master’s Thesis, Hunan University, Hunan, China, 2019. [Google Scholar]
- Peng, J. Research on Usage-Based Insurance Premiums and Driving Behaviour Scoring Based on GID. Master’s Thesis, Nanjing University of Posts and Telecommunications, Nanjing, China, 2016. [Google Scholar]
- Tselentis, D.I.; Yannis, G.; Vlahogianni, E.I. Innovative motor insurance schemes: A review of current practices and emerging challenges. Accid. Anal. Prev. 2017, 98, 139–148. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Signal Type | The Primary Parameters |
|---|---|
| Vehicle operation | Vehicle speed, mileage, position of the acceleration and brake pedal, steering wheel angle. |
| Power battery status | Total voltage and current of the battery pack, insulation resistance and temperature. |
| Motor operation | Voltage, current, motor speed, motor torque and temperature. |
| Vehicle accessories status | Voltage and current of the air conditioner, Voltage and current of the DC-DC. |
| Vehicle alert | Alert signal of power battery, motor and thermal management system. |
| Number | Index | Symbol | Definition | Unit |
|---|---|---|---|---|
| 1 | Standard deviation of vehicle speed | km/h | ||
| 2 | Average value of acceleration | m/s2 | ||
| 3 | Average value of deceleration | m/s2 | ||
| 4 | Standard deviation of acceleration | m/s2 | ||
| 5 | Standard deviation of deceleration | m/s2 | ||
| 6 | The number of rapid acceleration per 100 km | times/100 km | ||
| 7 | The number of sudden braking per 100 km | times/100 km | ||
| 8 | The number of rapid turning per 100 km | times/100 km | ||
| 9 | The number of speeding during steering per 100 km | times/100 km | ||
| 10 | Driving time per trip | - | hour | |
| 11 | Power consumption per 100 km | kW·h/100 km |
| Coefficient | 50% | 85% | 90% | 95% | 99% | 99.9% |
|---|---|---|---|---|---|---|
| β1 | −0.0042 | −0.0090 | −0.0102 | −0.0118 | −0.0150 | −0.0238 |
| β2 | 0.5312 | 1.2056 | 1.4002 | 1.7076 | 2.5000 | 3.5534 |
| R2 | 0.9123 | 0.9351 | 0.9386 | 0.9477 | 0.9708 | 0.9930 |
| Coefficient | 50% | 85% | 90% | 95% | 99% | 99.9% |
|---|---|---|---|---|---|---|
| β1 | −0.0087 | −0.0128 | −0.0146 | −0.0182 | −0.030 | −0.0565 |
| β2 | −0.2903 | −0.8529 | −1.0147 | −1.2648 | −1.8500 | −2.6433 |
| β3 | 0.0047 | 0.0105 | 0.012 | 0.0144 | 0.0220 | 0.0301 |
| β4 | −0.5456 | −1.3544 | −1.5801 | −1.9741 | −3.150 | −4.57 |
| R2 | 0.8266 | 0.8263 | 0.8402 | 0.8838 | 0.9494 | 0.9220 |
| Coefficient | 50% | 85% | 90% | 95% | 99% | 99.9% |
|---|---|---|---|---|---|---|
| a | 0.97 | 5.82 | 7.64 | 9.83 | 19.56 | 3.80 |
| b | −53.27 | −209.30 | −270.77 | −373.06 | −680.00 | −692.02 |
| c | 0.948 | 0.940 | 0.936 | 0.936 | 0.935 | 0.949 |
| R2 | 0.9932 | 0.9982 | 0.9985 | 0.9985 | 0.9942 | 0.9935 |
| Criterion Layer | Index Layer | Symbol of the Index |
|---|---|---|
| vehicle operation | The number of rapid accelerations per 100 km | |
| The number of sudden brakings per 100 km | ||
| The number of rapid turns per 100 km | ||
| The number of speeding occurrences during steering per 100 km | ||
| driving action | Standard deviation of vehicle speed | |
| Average value of acceleration | ||
| Average value of deceleration | ||
| Standard deviation of acceleration | ||
| Standard deviation of deceleration | ||
| fatigue driving/power consumption | Time of a driving event | |
| Power consumption per 100 km |
| Criterion Layer | Index Layer |
|---|---|
| Index | Weight (Wj) | Value (Percentage) |
|---|---|---|
| The number of rapid accelerations per 100 km | 0.0858 | 9 |
| The number of sudden brakings per 100 km | 0.0677 | 7 |
| The number of rapid turns per 100 km | 0.1580 | 16 |
| The number of speeding occurrences during steering per 100 km | 0.2280 | 22 |
| Standard deviation of vehicle speed | 0.0428 | 4 |
| Average value of acceleration | 0.0233 | 2 |
| Average value of deceleration | 0.0206 | 2 |
| Standard deviation of acceleration | 0.0434 | 4 |
| Standard deviation of deceleration | 0.0333 | 4 |
| Driving time per trip | 0.1525 | 15 |
| Power consumption per 100 km | 0.1445 | 15 |
| Index | Unit | Score | Score Rule |
|---|---|---|---|
| The number of rapid acceleration per 100 km | times/100 km | 9 | |
| The number of sudden braking per 100 km | times/100 km | 7 | |
| The number of rapid turning per 100 km | times/100 km | 16 | |
| The number of speeding during steering per 100 km | times/100 km | 22 | |
| Standard deviation of vehicle speed | km/h | 4 | |
| Average value of acceleration | m/s2 | 2 | |
| Standard deviation of acceleration | m/s2 | 4 | |
| Average value of deceleration | m/s2 | 2 | |
| Standard deviation of deceleration | m/s2 | 4 | |
| Driving time per trip | hour | 15 | |
| Power consumption | kW·h/100 km | 15 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ji, S.; Zhang, K.; Tian, G.; Yu, Z.; Lan, X.; Su, S.; Cheng, Y. Evaluation Method of Naturalistic Driving Behaviour for Shared-Electrical Car. Energies 2022, 15, 4625. https://doi.org/10.3390/en15134625
Ji S, Zhang K, Tian G, Yu Z, Lan X, Su S, Cheng Y. Evaluation Method of Naturalistic Driving Behaviour for Shared-Electrical Car. Energies. 2022; 15(13):4625. https://doi.org/10.3390/en15134625
Chicago/Turabian StyleJi, Shaobo, Ke Zhang, Guohong Tian, Zeting Yu, Xin Lan, Shibin Su, and Yong Cheng. 2022. "Evaluation Method of Naturalistic Driving Behaviour for Shared-Electrical Car" Energies 15, no. 13: 4625. https://doi.org/10.3390/en15134625
APA StyleJi, S., Zhang, K., Tian, G., Yu, Z., Lan, X., Su, S., & Cheng, Y. (2022). Evaluation Method of Naturalistic Driving Behaviour for Shared-Electrical Car. Energies, 15(13), 4625. https://doi.org/10.3390/en15134625