
Compromise Multi-Criteria Selection of E-Scooters for the Vehicle Sharing System in Poland


Abstract
:1. Introduction
2. Literature Review
3. Materials and Methods
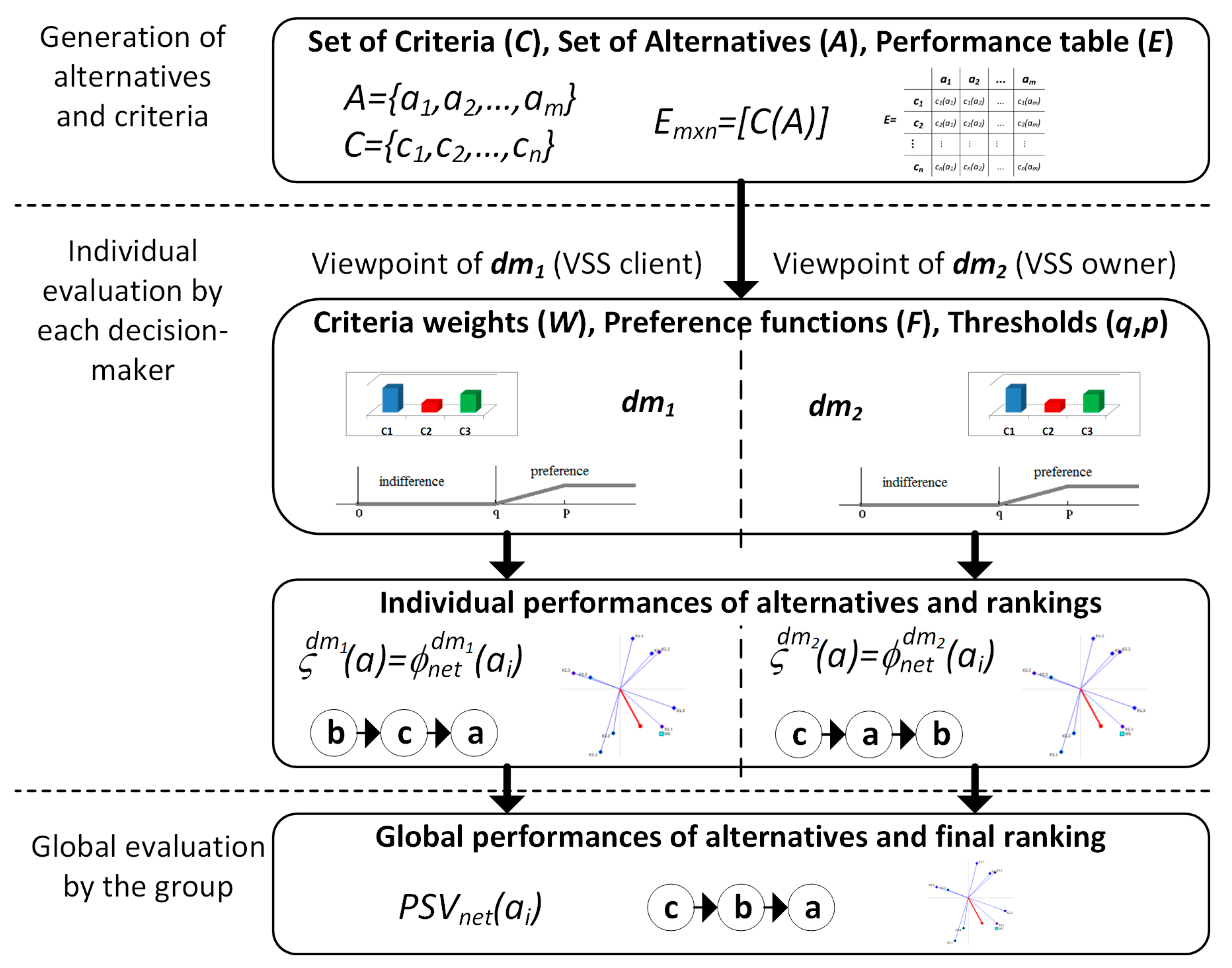
3.1. Research Approach
- generation of alternatives and criteria,
- individual evaluation by each decision maker,
- global evaluation by the group.
3.2. PROMETHEE II Method
- Step 1. Calculating the deviations based on pair-wise comparisons.
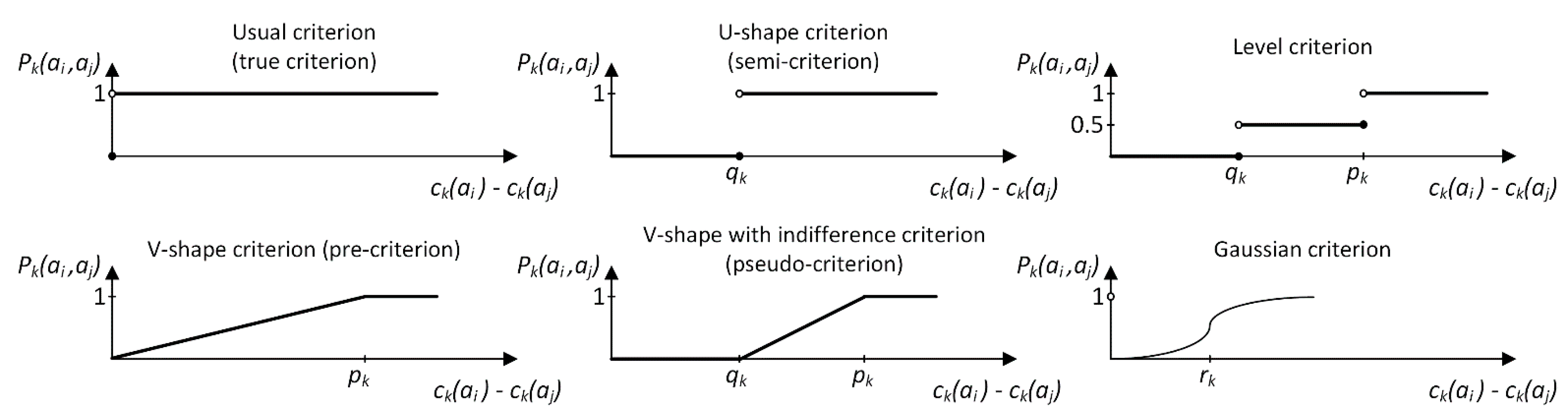
- Step 2. Applying the preference functions.
- Usual criterion (true criterion) (3):
- 2.
- U-shape criterion (semi-criterion) (4):
- 3.
- V-shape criterion (pre-criterion) (5):
- 4.
- Level criterion (6):
- 5.
- V-shape with indifference criterion (pseudo-criterion) (7):
- 6.
- Gaussian Criterion (8):
- Step 3. Calculating net outranking flows for individual criteria.
- Step 4. Calculating the global net outranking flow.
3.3. PROSA-C Method for GDSS
- Step 1. Calculating deviations based on pair-wise comparisons.
- Step 2. Calculating the value of the preferences.
- Step 3. Calculating net outranking flows for individual criteria.
- Step 4. Calculating the global net outranking flow.
- Step 5. Analysis of the criteria compensation relationship.
- The balance relation (≈)—occurs when and means that the evaluation of the alternative ai by the k-th decision maker is balanced in relation to the other decision makers.
- The relation of being compensated (Cd)—occurs when and means that the low evaluation of the alternative ai by the k-th decision maker is compensated for by the remaining decision makers ().
- Compensation relation (Cs)—occurs when and means that the high evaluation of the alternative ai by the k-th decision maker compensates for the assessments of other decision makers ().
- Step 6. Calculating absolute deviations for decision makers’ assessments.
- Step 7. Calculating individual PROSA values for decision makers’ evaluations.
- Step 8. Calculating the global net PROSA values.
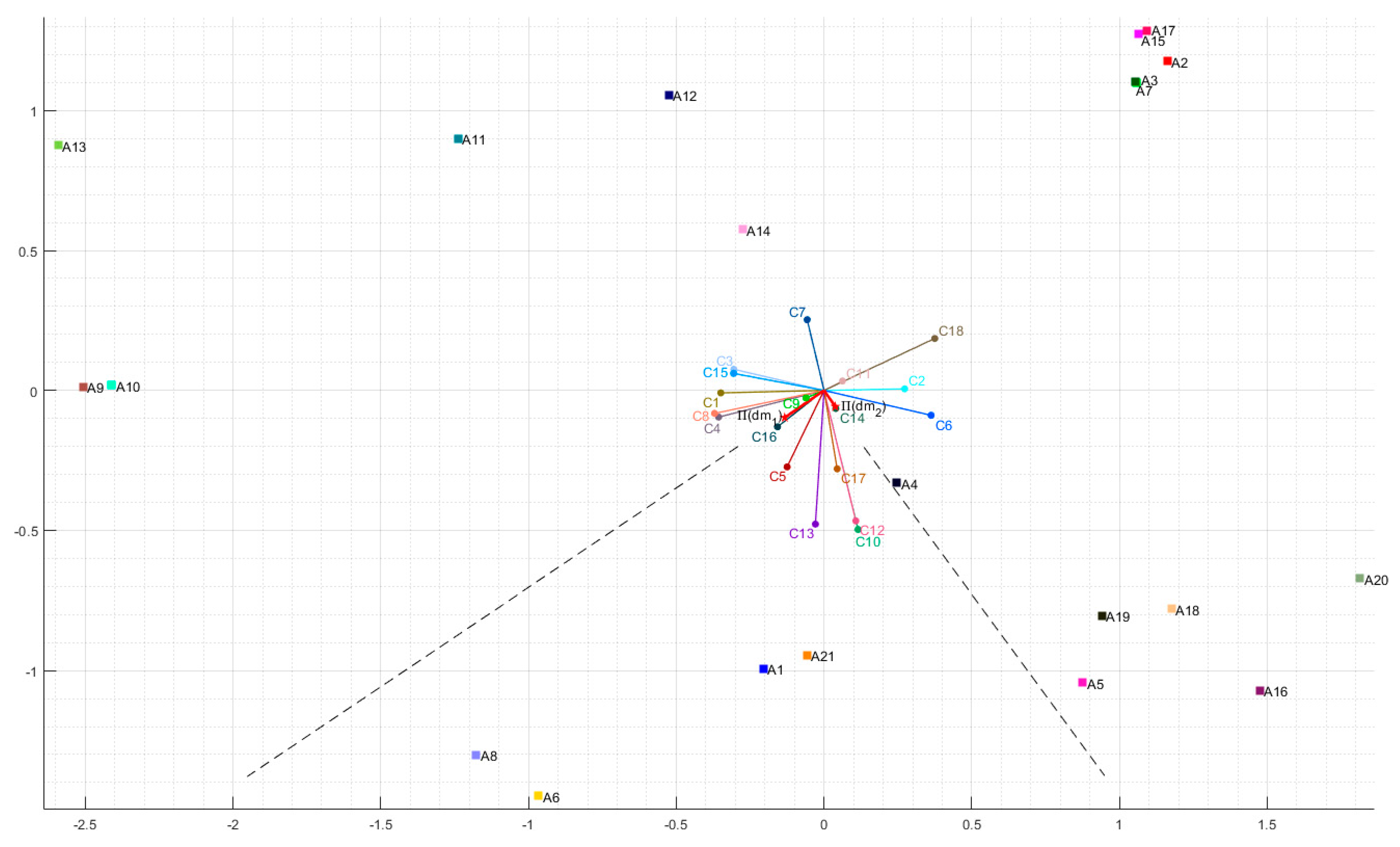
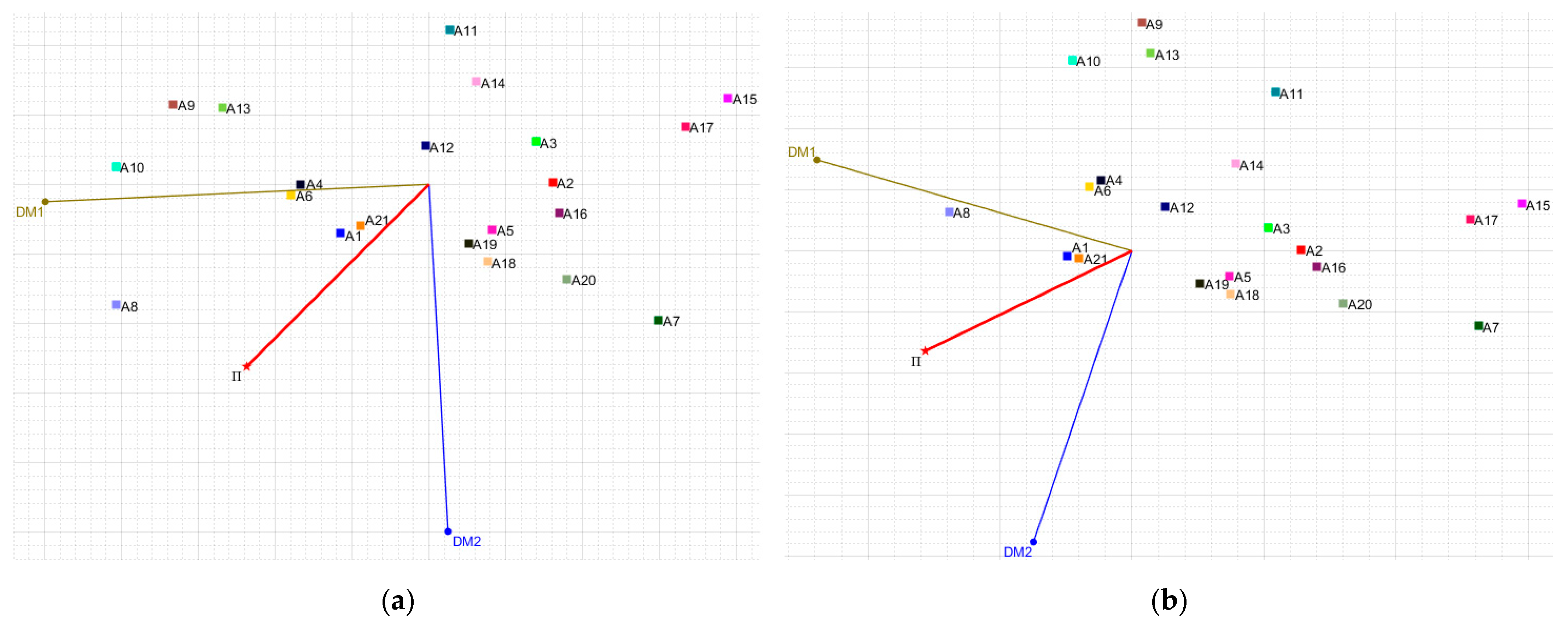
3.4. GAIA Analysis
- Step 1. Construction of the performance matrix.
- Step 2. Calculating the variance-covariance matrix and determining the GAIA plane.
- Step 3. Finding coordinates of alternatives.
- Step 4. Determining the coordinates of the criteria/decision makers’ vectors.
- Step 5. Determining the direction of searching for a compromise solution.
- Step 6. Calculating information loss.
4. Results
4.1. Collection of Alternatives and Criteria, Performance Table of Alternatives
4.2. Models of Stakeholder Preferences
- dm1—VSS customer, i.e., a potential e-scooter user,
- dm2—VSS owner, making e-scooters available to users.
4.3. Results of E-Scooters Assessment Using the PROSA GDSS Method
5. Discussion
5.1. Comparison of the Results of the PROSA GDSS and PROMETHEE GDSS Methods
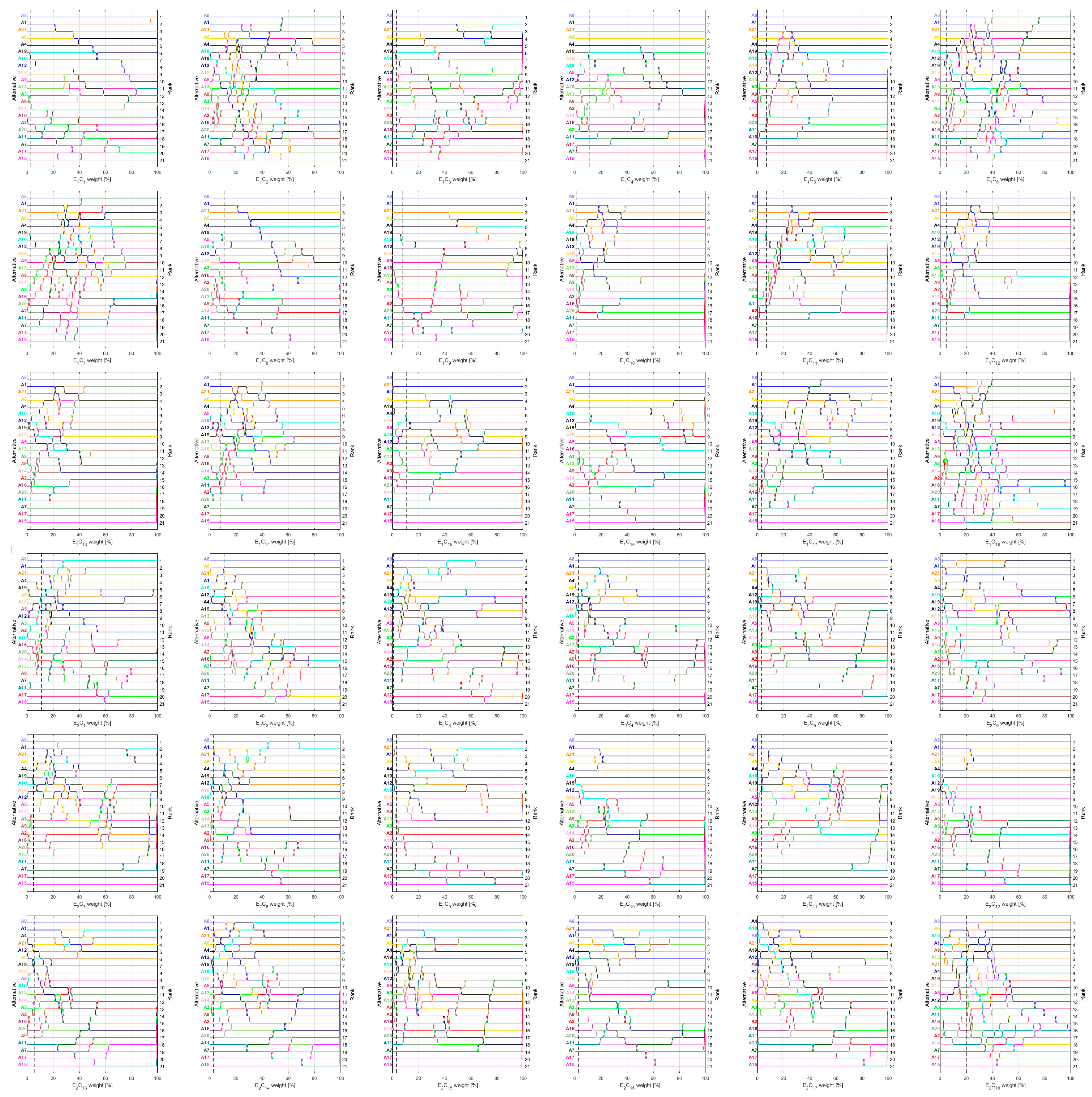
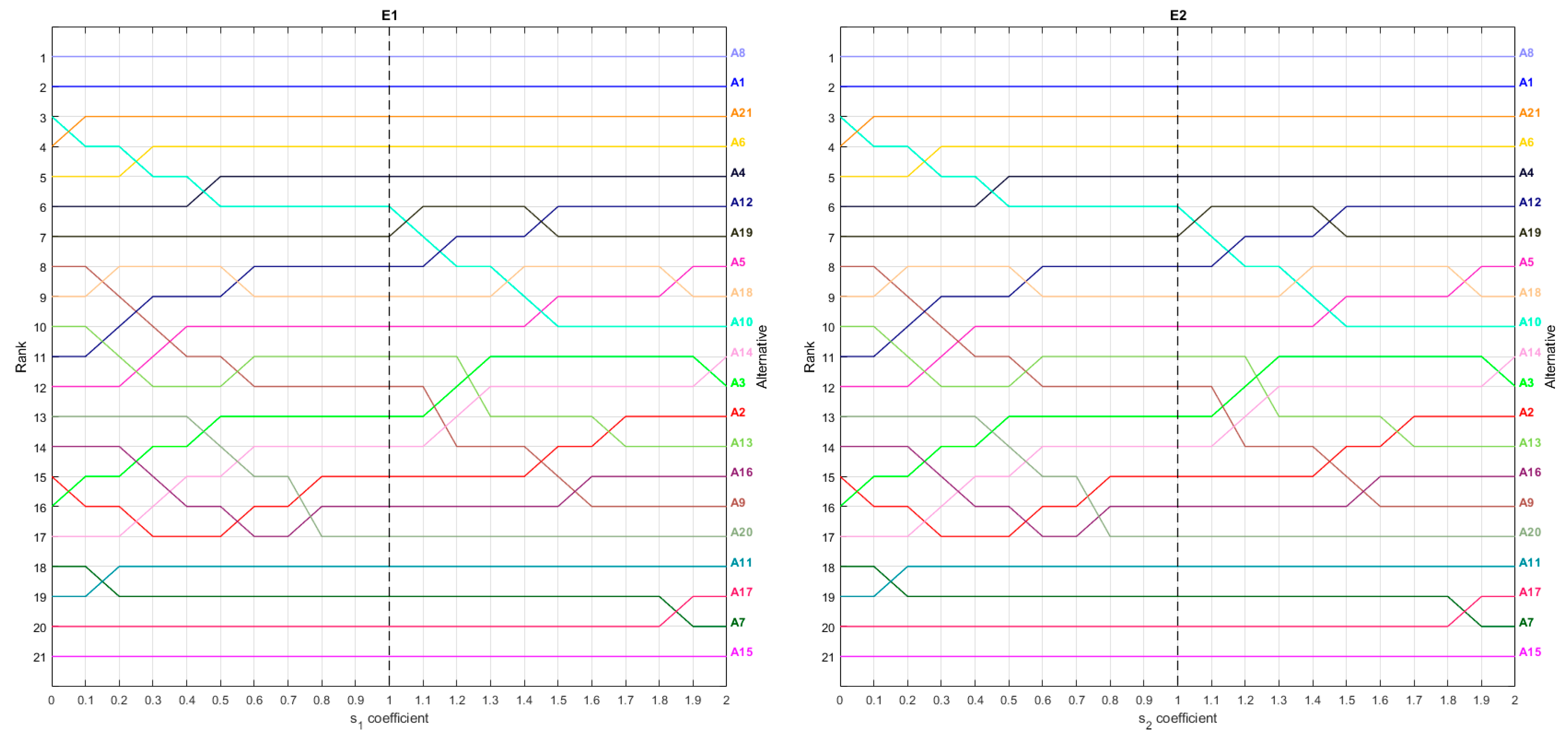
5.2. PROSA GDSS Sensitivity Analysis
6. Managerial and Environmental Implications
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- OPEC. World Oil Outlook; OPEC: Vienna, Austria, 2012; ISBN 978-3-9502722-4-6. [Google Scholar]
- Intergovernmental Panel on Climate Change. Climate Change 2007: Mitigation of Climate Change; Cambridge University Press: Cambridge, UK, 2007; ISBN 978-0-511-54601-3. [Google Scholar]
- Ortega-Cabezas, P.-M.; Colmenar-Santos, A.; Borge-Diez, D.; Blanes-Peiró, J.-J. Can Eco-Routing, Eco-Driving and Eco-Charging Contribute to the European Green Deal? Case Study: The City of Alcalá de Henares (Madrid, Spain). Energy 2021, 228, 120532. [Google Scholar] [CrossRef]
- EMEP/EEA Air Pollutant Emission Inventory Guidebook 2019—European Environment Agency. Available online: https://www.eea.europa.eu//publications/emep-eea-guidebook-2019 (accessed on 26 March 2022).
- Nowelizacja Ustawy o Elektromobilności i Paliwach Alternatywnych z Podpisem Prezydenta RP—Ministerstwo Klimatu i Środowiska—Portal Gov.pl. Available online: https://www.gov.pl/web/klimat/nowelizacja-ustawy-o-elektromobilnosci-i-paliwach-alternatywnych-z-podpisem-prezydenta-rp (accessed on 17 March 2022).
- Lis, A.; Szymanowski, R. Greening Polish Transportation? Untangling the Nexus between Electric Mobility and a Carbon-Based Regime. Energy Res. Soc. Sci. 2022, 83, 102336. [Google Scholar] [CrossRef]
- Macaudière, P.; Rocher, L.; Naschke, W. Diesel Particulate Filters. MTZ Worldw. 2004, 65, 11–13. [Google Scholar] [CrossRef]
- Meijering, J.V.; Kern, K.; Tobi, H. Identifying the Methodological Characteristics of European Green City Rankings. Ecol. Indic. 2014, 43, 132–142. [Google Scholar] [CrossRef]
- Salmeron-Manzano, E.; Manzano-Agugliaro, F. The Electric Bicycle: Worldwide Research Trends. Energies 2018, 11, 1894. [Google Scholar] [CrossRef] [Green Version]
- Lin, H.-H.; Shen, C.-C.; Hsu, I.-C.; Wu, P.-Y. Can Electric Bicycles Enhance Leisure and Tourism Activities and City Happiness? Energies 2021, 14, 8144. [Google Scholar] [CrossRef]
- Sandoval, R.; Van Geffen, C.; Wilbur, M.; Hall, B.; Dubey, A.; Barbour, W.; Work, D.B. Data Driven Methods for Effective Micromobility Parking. Transp. Res. Interdiscip. Perspect. 2021, 10, 100368. [Google Scholar] [CrossRef]
- Shamshiripour, A.; Rahimi, E.; Shabanpour, R.; Mohammadian, A. (Kouros) How Is COVID-19 Reshaping Activity-Travel Behavior? Evidence from a Comprehensive Survey in Chicago. Transp. Res. Interdiscip. Perspect. 2020, 7, 100216. [Google Scholar] [CrossRef]
- Felipe-Falgas, P.; Madrid-Lopez, C.; Marquet, O. Assessing Environmental Performance of Micromobility Using LCA and Self-Reported Modal Change: The Case of Shared E-Bikes, E-Scooters, and E-Mopeds in Barcelona. Sustainability 2022, 14, 4139. [Google Scholar] [CrossRef]
- Storme, T.; Casier, C.; Azadi, H.; Witlox, F. Impact Assessments of New Mobility Services: A Critical Review. Sustainability 2021, 13, 3074. [Google Scholar] [CrossRef]
- Bajec, P.; Tuljak-Suban, D.; Zalokar, E. A Distance-Based AHP-DEA Super-Efficiency Approach for Selecting an Electric Bike Sharing System Provider: One Step Closer to Sustainability and a Win–Win Effect for All Target Groups. Sustainability 2021, 13, 549. [Google Scholar] [CrossRef]
- Hamerska, M.; Ziółko, M.; Stawiarski, P. Assessment of the Quality of Shared Micromobility Services on the Example of the Electric Scooter Market in Poland. IJQR 2022, 16, 19–34. [Google Scholar] [CrossRef]
- Ziemba, P. Multi-Criteria Group Assessment of E-Commerce Websites Based on the New PROSA GDSS Method–the Case of Poland. IEEE Access 2021, 9, 126595–126609. [Google Scholar] [CrossRef]
- Marques, D.L.; Coelho, M.C. A Literature Review of Emerging Research Needs for Micromobility—Integration through a Life Cycle Thinking Approach. Future Transp. 2022, 2, 135–164. [Google Scholar] [CrossRef]
- Boglietti, S.; Barabino, B.; Maternini, G. Survey on E-Powered Micro Personal Mobility Vehicles: Exploring Current Issues towards Future Developments. Sustainability 2021, 13, 3692. [Google Scholar] [CrossRef]
- Tian, Z.; Wang, J.; Wang, J.; Zhang, H. A Multi-Phase QFD-Based Hybrid Fuzzy MCDM Approach for Performance Evaluation: A Case of Smart Bike-Sharing Programs in Changsha. J. Clean. Prod. 2018, 171, 1068–1083. [Google Scholar] [CrossRef]
- Karolemeas, C.; Vassi, A.; Tsigdinos, S.; Bakogiannis, E. Measure the Ability of Cities to Be Biked via Weighted Parameters, Using GIS Tools. The Case Study of Zografou in Greece. Transp. Res. Procedia 2022, 62, 59–66. [Google Scholar] [CrossRef]
- Kurniadhini, F.; Roychansyah, M.S. The Suitability Level of Bike-Sharing Station in Yogyakarta Using SMCA Technique. IOP Conf. Ser. Earth Environ. Sci. 2020, 451, 012033. [Google Scholar] [CrossRef]
- Kabak, M.; Erbaş, M.; Çetinkaya, C.; Özceylan, E. A GIS-Based MCDM Approach for the Evaluation of Bike-Share Stations. J. Clean. Prod. 2018, 201, 49–60. [Google Scholar] [CrossRef]
- Eren, E.; Katanalp, B.Y. Fuzzy-Based GIS Approach with New MCDM Method for Bike-Sharing Station Site Selection According to Land-Use Types. Sustain. Cities Soc. 2022, 76, 103434. [Google Scholar] [CrossRef]
- Guler, D.; Yomralioglu, T. Bicycle Station and Lane Location Selection Using Open Source GIS Technology. In Open Source Geospatial Science for Urban Studies: The Value of Open Geospatial Data; Mobasheri, A., Ed.; Springer International Publishing: Cham, Switzerland, 2021; pp. 9–36. ISBN 978-3-030-58232-6. [Google Scholar]
- Fazio, M.; Giuffrida, N.; Le Pira, M.; Inturri, G.; Ignaccolo, M. Planning Suitable Transport Networks for E-Scooters to Foster Micromobility Spreading. Sustainability 2021, 13, 11422. [Google Scholar] [CrossRef]
- Psarrou Kalakoni, A.M.; Christoforou, Z.; Farhi, N. A Novel Methodology for Micromobility System Assessment Using Multi-Criteria Analysis. Case Stud. Transp. Policy 2022, 10, 976–992. [Google Scholar] [CrossRef]
- Torkayesh, A.E.; Deveci, M. A MulTi-NoRmalization MUlti-Distance ASsessmenT (TRUST) Approach for Locating a Battery Swapping Station for Electric Scooters. Sustain. Cities Soc. 2021, 74, 103243. [Google Scholar] [CrossRef]
- Tang, Y.; Yang, Y. Sustainable E-Bike Sharing Recycling Supplier Selection: An Interval-Valued Pythagorean Fuzzy MAGDM Method Based on Preference Information Technology. J. Clean. Prod. 2021, 287, 125530. [Google Scholar] [CrossRef]
- Deveci, M.; Gokasar, I.; Pamucar, D.; Coffman, D.; Papadonikolaki, E. Safe E-Scooter Operation Alternative Prioritization Using a q-Rung Orthopair Fuzzy Einstein Based WASPAS Approach. J. Clean. Prod. 2022, 347, 131239. [Google Scholar] [CrossRef]
- Wankmüller, C.; Kunovjanek, M.; Sposato, R.G.; Reiner, G. Selecting E-Mobility Transport Solutions for Mountain Rescue Operations. Energies 2020, 13, 6613. [Google Scholar] [CrossRef]
- Sałabun, W.; Palczewski, K.; Wątróbski, J. Multicriteria Approach to Sustainable Transport Evaluation under Incomplete Knowledge: Electric Bikes Case Study. Sustainability 2019, 11, 3314. [Google Scholar] [CrossRef] [Green Version]
- Ziemba, P.; Gago, I. Uncertainty of Preferences in the Assessment of Supply Chain Management Systems Using the PROMETHEE Method. Symmetry 2022, 14, 1043. [Google Scholar] [CrossRef]
- Brans, J.-P.; De Smet, Y. PROMETHEE Methods. In Multiple Criteria Decision Analysis: State of the Art Surveys; Greco, S., Ehrgott, M., Figueira, J.R., Eds.; International Series in Operations Research & Management Science; Springer: New York, NY, USA, 2016; pp. 187–219. ISBN 978-1-4939-3094-4. [Google Scholar]
- Ziemba, P. Multi-Criteria Stochastic Selection of Electric Vehicles for the Sustainable Development of Local Government and State Administration Units in Poland. Energies 2020, 13, 6299. [Google Scholar] [CrossRef]
- Ishizaka, A.; Nemery, P. General Introduction. In Multi-Criteria Decision Analysis: Methods and Software; Wiley: Chichester, UK, 2013; pp. 1–9. ISBN 978-1-118-64489-8. [Google Scholar]
- Mareschal, B.; Brans, J.-P. Geometrical Representations for MCDA. Eur. J. Oper. Res. 1988, 34, 69–77. [Google Scholar] [CrossRef]
- Ziemba, P. Towards Strong Sustainability Management—A Generalized PROSA Method. Sustainability 2019, 11, 1555. [Google Scholar] [CrossRef] [Green Version]
- Statista Poland: Most Popular Electronics Stores. 2021. Available online: https://www.statista.com/statistics/1242536/poland-most-popular-electronics-stores/ (accessed on 26 May 2022).
- Apostolou, G.; Reinders, A.; Geurs, K. An Overview of Existing Experiences with Solar-Powered E-Bikes. Energies 2018, 11, 2129. [Google Scholar] [CrossRef] [Green Version]
- Timmermans, J.-M.; Matheys, J.; Lataire, P.; Van Mierlo, J.; Cappelle, J. A Comparative Study of 12 Electrically Assisted Bicycles. World Electr. Veh. J. 2009, 3, 93–103. [Google Scholar] [CrossRef]
- Ziemba, P. Multi-Criteria Approach to Stochastic and Fuzzy Uncertainty in the Selection of Electric Vehicles with High Social Acceptance. Expert Syst. Appl. 2021, 173, 114686. [Google Scholar] [CrossRef]
- Ziemba, P. Selection of Electric Vehicles for the Needs of Sustainable Transport under Conditions of Uncertainty—A Comparative Study on Fuzzy MCDA Methods. Energies 2021, 14, 7786. [Google Scholar] [CrossRef]
- Biswas, T.K.; Das, M.C. Selection of Commercially Available Electric Vehicle Using Fuzzy AHP-MABAC. J. Inst. Eng. India Ser. C 2019, 100, 531–537. [Google Scholar] [CrossRef]
- Ecer, F. A Consolidated MCDM Framework for Performance Assessment of Battery Electric Vehicles Based on Ranking Strategies. Renew. Sustain. Energy Rev. 2021, 143, 110916. [Google Scholar] [CrossRef]
- Sonar, H.C.; Kulkarni, S.D. An Integrated AHP-MABAC Approach for Electric Vehicle Selection. Res. Transp. Bus. Manag. 2021, 41, 100665. [Google Scholar] [CrossRef]
- Piwowarski, M.; Borawski, M.; Nermend, K. The Problem of Non-Typical Objects in the Multidimensional Comparative Analysis of the Level of Renewable Energy Development. Energies 2021, 14, 5803. [Google Scholar] [CrossRef]
- Ustawa z Dnia 30 Marca 2021 r. o Zmianie Ustawy—Prawo o Ruchu Drogowym Oraz Niektórych Innych Ustaw. Available online: https://isap.sejm.gov.pl/isap.nsf/DocDetails.xsp?id=WDU20210000720 (accessed on 30 May 2022).
- Aprilia ESR2. Available online: https://www.apriliasmartmovement.it/en/product/aprilia-esr2/ (accessed on 30 May 2022).
- Blaupunkt ESC608. Available online: https://blaupunkt.com/cpl/produkt/esc608/ (accessed on 30 May 2022).
- Blaupunkt ESC808. Available online: https://blaupunkt.com/cpl/produkt/esc808/ (accessed on 30 May 2022).
- Blaupunkt ESC90X. Available online: https://blaupunkt.com/cpl/produkt/esc90x/ (accessed on 30 May 2022).
- Ducati PRO-I EVO. Available online: https://www.ducatiurbanemobility.com/electric-mobility/pro-i-evo/ (accessed on 30 May 2022).
- Ducati PRO-III. Available online: https://www.ducatiurbanemobility.com/electric-mobility/pro-iii/ (accessed on 30 May 2022).
- FIAT F500-F85P. Available online: https://4cv.pl/wp-content/uploads/2021/03/F500-F85_manual_EN_PL.pdf (accessed on 30 May 2022).
- Jeep 2xe Camou Electric Scooter Review. Available online: https://scooter.guide/jeep-2xe-camou-electric-scooter-review/ (accessed on 30 May 2022).
- Kaabo Mantis 8 PLUS Electric Scooter. Available online: https://kaaboeurope.com/products/kaabo-mantis-8-plus-electric-scooter (accessed on 30 May 2022).
- Kaabo Mantis 10 ECO 800 (Lite Plus) Electric Scooter. Available online: https://kaaboeurope.com/products/kaabo-mantis-10-lite-plus-electric-scooter (accessed on 30 May 2022).
- Kaabo Skywalker 8H ECO500. Available online: https://kaabostore.eu/product/skywalker-8h (accessed on 30 May 2022).
- Motus PRO 8.5 Lite 350W 35 km/h. Available online: https://motusxd.pl/hulajnogi-za-miasto/20-190-hulajnoga-elektryczna-motus-pro-85-lite-350w-35kmh-5901821995450.html (accessed on 30 May 2022).
- Motus PRO 10 sport 2021 2 × 1000 W 66 km/h. Available online: https://motusxd.pl/hulajnogi-za-miasto/28-553-hulajnoga-elektryczna-motus-pro-10-sport-2021-2x1000w-66kmh-5901821995474.html (accessed on 30 May 2022).
- Red Bull Racing RTEEN10-10. Available online: https://www.mediaexpert.pl/products/files/37/3735110/instrukcja-obslugi-RED-BULL-Racing-10-Pro.pdf (accessed on 30 May 2022).
- Red Bull Racing RTEEN85-75. Available online: https://www.mediaexpert.pl/products/files/37/3735102/instrukcja-obslugi-red-bull-rteen85-75.pdf (accessed on 30 May 2022).
- Segway T15D. Available online: https://pl-pl.segway.com/products/ninebot-kickscooter-air-t15e-powered-by-segway-1 (accessed on 30 May 2022).
- Skymaster Nexos. Available online: https://skymaster24.pl/sklep/hulajnogi/212--hulajnoga-elektryczna-skymaster-nexos.html (accessed on 30 May 2022).
- Mi Electric Scooter 1S. Available online: https://www.mi.com/global/mi-electric-scooter-1S/ (accessed on 30 May 2022).
- Mi Electric Scooter 3. Available online: https://www.mi.com/global/product/mi-electric-scooter-3/ (accessed on 30 May 2022).
- Mi Electric Scooter Essential. Available online: https://www.mi.com/global/mi-electric-scooter-essential/ (accessed on 30 May 2022).
- Mi Electric Scooter Pro 2. Available online: https://www.mi.com/global/mi-electric-scooter-Pro2/ (accessed on 30 May 2022).
- Wang, K.; Qian, X.; Fitch, D.T.; Lee, Y.; Malik, J.; Circella, G. What Travel Modes Do Shared E-Scooters Displace? A Review of Recent Research Findings. Transp. Rev. 2022, 102, 103134. [Google Scholar] [CrossRef]
- Yang, H.; Bao, Y.; Huo, J.; Hu, S.; Yang, L.; Sun, L. Impact of Road Features on Shared E-Scooter Trip Volume: A Study Based on Multiple Membership Multilevel Model. Travel Behav. Soc. 2022, 28, 204–213. [Google Scholar] [CrossRef]
- Cao, Z.; Zhang, X.; Chua, K.; Yu, H.; Zhao, J. E-Scooter Sharing to Serve Short-Distance Transit Trips: A Singapore Case. Transp. Res. Part A Policy Pract. 2021, 147, 177–196. [Google Scholar] [CrossRef]
- Chicco, A.; Diana, M. Understanding Micro-Mobility Usage Patterns: A Preliminary Comparison between Dockless Bike Sharing and e-Scooters in the City of Turin (Italy). Transp. Res. Procedia 2022, 62, 459–466. [Google Scholar] [CrossRef]
- Deshmukh, S.C. Preference Ranking Organization Method Of Enrichment Evaluation (Promethee). Int. J. Eng. Sci. Invent. 2013, 2, 28–34. [Google Scholar]
- Roy, B. The Outranking Approach and the Foundations of Electre Methods. Theory Decis. 1991, 31, 49–73. [Google Scholar] [CrossRef]
- Połom, M. E-Revolution in Post-Communist Country? A Critical Review of Electric Public Transport Development in Poland. Energy Res. Soc. Sci. 2021, 80, 102227. [Google Scholar] [CrossRef]
- European Commission. Annex to the Proposal for a Council Implementing Decision on the Approval of the Assessment of the Recovery and Resilience Plan for Poland; European Commission: Brussels, Belgium, 2022. [Google Scholar]
- Polishnews Surcharges for Electric Cars. My Electrician Program Start. Available online: https://polishnews.co.uk/surcharges-for-electric-cars-my-electrician-program-start/ (accessed on 10 July 2022).
- Bates, K. Subsidies for Electric Bikes in the First City in Poland! GAMINGDEPUTY 2022. Available online: https://www.gamingdeputy.com/subsidies-for-electric-bikes-in-the-first-city-in-poland/ (accessed on 10 July 2022).
- Kudełko, M. Modeling of Polish Energy Sector—Tool Specification and Results. Energy 2021, 215, 119149. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Aim of the Research | Subject of Research | Location | MCDA Methods | No of Criteria/Subcriteria | No of Alternatives | Comment | Ref. |
|---|---|---|---|---|---|---|---|
| Development of a smart performance evaluation framework BSPs | BSPs | Changsha, China | Fuzzy BWM (CW), Fuzzy MDM (CW), Fuzzy MULTIMOORA (PA) | 18 | 5 | 4 experts | [20] |
| Development of an index assessing the possibility of using a bicycle in the existing road network | Roads (road network) | Zografou, Greece | AHP | 3/10 | Infinity | [21] | |
| Identification of suitable locations for BSS stations | Potential locations of BSS stations in the GIS system | Yogyakarta, Indonesia | AHP (CW), SMCA (PA) | 3/13 | Infinity | [22] | |
| Location suitability analysis for BSS stations | Potential locations of BSS stations in the GIS system | Karsiyaka, Izmir, Turkey | AHP (CW), MULTIMOORA (PA) | 3/12 | 19 | [23] | |
| Determining the appropriate locations of BSS stations depending on the type of land development | Potential locations of BSS stations in the GIS system | Izmir, Turkey | AHP (CW), VIKOR (PA), Psychometric VIKOR (PA) | 9/21 | 42 (transportation related), 28 (recreational) | [24] | |
| Decision support in the selection of locations for BSS and BL stations | Potential locations of BSS and BL stations in the GIS system | Istanbul, Turkey | AHP (CW), Fuzzy AHP (CW), BWM (CW), TOPSIS (PA) | 9 | 39 (BSS station), 6 (BL) | 3 scenarios | [25] |
| Transport network suitability analysis for e-scooters | Roads (road network) | Catania, Italy | SMCA | 7 | Infinity | [26] | |
| Development of an index to assess the fit of the neighborhood for specific types of micromobility and selection of the micromobility system for a given area | Micromobility systems (station-based, free floating, privately owned: bikes, e-bikes, e-scooters) | Paris, France | AHP | 11/78 (index related), 8/12 (selection related) | 0 (index related), 7 (selection related) | [27] | |
| Development of a BSST location selection framework for e-scooters | Potential BSST locations | Istanbul, Turkey | TRUST | 10 | 4 | [28] | |
| Choosing sustainable e-bike-sharing recycling supplier | Recycling service providers | - | IVPFIDM | 8 | 4 | 3 experts | [29] |
| Development of a DSS to evaluate strategies leading to the safe use of e-scooters | Policies to develop e-scooters security | - | Fuzzy LAAW (CW), qROFS Einstein WASPAS (PA) | 14 | 3 | 5 experts | [30] |
| Choosing an e-BSS provider | Real and fictional e-BSS providers | Slovenia | DAHP (CW), DEA (PA) | 26 | 24 | [15] | |
| Selection of assessment attributes for e-micromobility transport solutions | E-microtransport evaluation criteria for mountain rescue | Austria / Italy | BWM (CW) | 22 | - | [31] | |
| Analysis of e-bikes in the context of sustainable transport in order to select the best vehicle | E-bikes | - | COMET | 8 | 64 | [32] |
| No | Criterion | Unit | Direction | Reference |
|---|---|---|---|---|
| Battery capacity | Ampere hours [Ah] | Max | [31,32,40,41,42,43,45,46] | |
| Battery charging time | Hours [h] | Min | [15,32,41,42,43,45,46] | |
| Engine power | Watts [W] | Max | [32,40,42,43,45] | |
| Max gradient | Percent [%] | Max | [31] | |
| Number of gears | Units | Max | [32] | |
| Weight | Kilograms [kg] | Min | [31,32,40,41,45] | |
| Load capacity | Kilograms [kg] | Max | [42,43,45,46] | |
| Range | Kilometers [km] | Max | [15,31,32,40,41,42,43,44,45,46] | |
| Tires diameter | Inches [inch] | Max | ||
| Mobile app | True/False | Max | ||
| Cruise control | True/False | Max | ||
| Pedestrian mode | True/False | Max | ||
| KERS | True/False | Max | ||
| e-ABS | True/False | Max | ||
| Suspension | True/False | Max | [15] | |
| Brakes | Points | Max | ||
| Protection rating | Points | Max | [31] | |
| Price | Polish new zloty [PLN] | Min | [31,32,41,42,43,44,45,46] |
| Criterion | A1—APRILIA eSR2 | A2—BLAUPUNKT ESC608 | A3—BLAUPUNKT ESC808 | A4—BLAUPUNKT ESC90X | A5—DUCATI PRO-I EVO 2022 | A6—DUCATI PRO-III 2022 | A7—FIAT F500-F85P | A8—JEEP 2xe Urban Camou | A9—Kaabo Mantis 8 | A10—Kaabo Mantis 10 ECO800 | A11—Kaabo Sky-walker 8H ECO 500 | A12—Motus PRO 8.5 Lite | A13—Motus PRO 10 Sport 2021 | A14—Red Bull Racing RTEEN10-10 | A15—Red Bull Racing RTEEN85-75 | A16—Segway KickScooter AIR T15E | A17—SKYMASTER Nexos | A18—XIAOMI Mi 1S | A19—XIAOMI Mi 3 | A20—XIAOMI Mi Essential | A21—XIAOMI Mi Pro2 2022 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Popularity ranks | -/2/- | -/-/2 | -/8/- | -/-/9 | -/3/- | -/6/- | -/-/4 | -/4/- | 8/-/- | 6/-/- | 9/-/- | 4/-/5 | 2/7/10 | 5/5/- | 10/-/- | 7/-/- | -/-/7 | -/-/8 | 3/9/1 | -/1/3 | 1/10/6 |
| Battery capacity [Ah] | 8 | 6 | 5 | 10 | 7.8 | 13 | 7.5 | 9.6 | 18.2 | 18.2 | 13 | 10.4 | 18.2 | 10.4 | 7.5 | 4 | 6 | 7.65 | 7.65 | 5.1 | 12.4 |
| Battery charging time [h] | 5 | 5 | 2 | 6 | 4 | 9 | 4 | 5 | 8.5 | 8 | 7 | 8 | 9 | 8 | 5 | 4 | 5 | 5.5 | 5.5 | 3.5 | 8.5 |
| Engine power [W] | 350 | 250 | 350 | 350 | 350 | 350 | 350 | 500 | 1600 * | 800 | 500 | 350 | 2000 ** | 350 | 350 | 300 | 350 | 250 | 300 | 250 | 300 |
| Max gradient [%] | 23 | 15 | 18 | 15 | 15 | 20 | 15 | 26 | 30 | 30 | 20 | 20 | 30 | 15 | 10 | 15 | 10 | 14 | 16 | 10 | 20 |
| Number of gears | 3 | 3 | 3 | 4 | 4 | 4 | 3 | 4 | 4 | 4 | 3 | 3 | 3 | 3 | 3 | 4 | 3 | 3 | 3 | 3 | 3 |
| Weight [kg] | 16.5 | 15 | 13.5 | 14.5 | 12 | 17.5 | 14 | 19 | 26.5 | 26 | 18 | 17 | 29 | 17.3 | 14 | 10.5 | 14.2 | 12.5 | 13.2 | 12 | 14.2 |
| Load capacity [kg] | 100 | 120 | 120 | 120 | 100 | 100 | 140 | 100 | 120 | 120 | 100 | 120 | 150 | 100 | 120 | 100 | 120 | 100 | 100 | 100 | 100 |
| Range [km] | 25 | 20 | 20 | 40 | 25 | 50 | 20 | 45 | 56 | 54 | 45 | 35 | 65 | 35 | 20 | 15 | 25 | 30 | 30 | 20 | 45 |
| Tires diameter [inch] | 10 | 8.5 | 8.5 | 10 | 8.5 | 10 | 8.5 | 10 | 8 | 10 | 8 | 8.5 | 10 | 10 | 8.5 | 7.5 | 10 | 8.5 | 8.5 | 8.5 | 8.5 |
| Mobile app | 1 | 0 | 0 | 1 | 1 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 1 | 1 | 1 |
| Cruise control | 0 | 1 | 1 | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 |
| Pedestrian mode | 1 | 0 | 0 | 1 | 1 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 1 | 1 | 1 | 1 |
| KERS | 1 | 0 | 0 | 0 | 1 | 1 | 0 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 1 | 1 | 1 |
| e-ABS | 0 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 |
| Front & rear suspension | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Brakes [points] | 3 | 2 | 1 | 2 | 2 | 3 | 1 | 3 | 3 | 3 | 2 | 1 | 3 | 1 | 1 | 0 | 1 | 2 | 2 | 2 | 2 |
| Protection rating [points] | 3 | 0 | 0 | 0 | 2 | 3 | 3 | 3 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 3 | 0 | 2 | 2 | 2 | 2 |
| Price [PLN] | 4080 | 1600 | 2480 | 2790 | 2700 | 5500 | 1600 | 5200 | 7500 | 6000 | 4000 | 2700 | 7000 | 2500 | 2000 | 3060 | 1700 | 2060 | 2290 | 1750 | 2700 |
| Front (FB) and rear brake (RB) | FB–D RB–C | FB–E RB–C | RB–C,F | FB–E RB–C,F | FB–E RB–C | FB–C RB–C | RB–C | FB–C RB–C | FB–C RB–C | FB–C RB–C | FB–E RB–D | RB–D | FB–C RB–C | RB–C | RB–C | FB–E RB–F | RB–C,F | FB–E RB–C | FB–E RB–C | FB–E RB–C | FB–E RB–C |
| Protection rating | IPX4 | - | - | - | IP54 | IPX4 | IPX4 | IPX4 | - | - | - | IP44 | IP44 | - | - | IPX4 | - | IP54 | IP54 | IP54 | IP54 |
| Reference | [49] | [50] | [51] | [52] | [53] | [54] | [55] | [56] | [57] | [58] | [59] | [60] | [61] | [62] | [63] | [64] | [65] | [66] | [67] | [68] | [69] |
| No | Criterion | Unit | Preference Direction | Weight [%] | Preference Function | Thresholds | ||
|---|---|---|---|---|---|---|---|---|
| VSS Client (dm1) | VSS Client (dm2) | q | p | |||||
| Battery capacity | Ampere hours [Ah] | Max | 3 | 11 | pre | - | 6 | |
| Battery charging time | Hours [h] | Min | 0 | 11 | pre | - | 4 | |
| Engine power | Watts [W] | Max | 3 | 1 | pre | - | 200 | |
| Max gradient | Percent [%] | Max | 11 | 3 | pseudo | 2 | 6 | |
| Number of gears | Units | Max | 7 | 3 | usual | - | - | |
| Weight | Kilograms [kg] | Min | 5 | 2 | pre | - | 5 | |
| Load capacity | Kilograms [kg] | Max | 3 | 5 | level | 0 | 30 | |
| Range | Kilometers [km] | Max | 11 | 3 | pseudo | 2 | 15 | |
| Tires diameter | Inches [inch] | Max | 8 | 3 | level | 0 | 1.5 | |
| Mobile app | True / False | Max | 1 | 0 | usual | - | - | |
| Cruise control | True / False | Max | 7 | 3 | usual | - | - | |
| Pedestrian mode | True / False | Max | 5 | 2 | usual | - | - | |
| KERS | True / False | Max | 3 | 6 | usual | - | - | |
| e-ABS | True / False | Max | 8 | 3 | usual | - | - | |
| Suspension | True / False | Max | 11 | 3 | usual | - | - | |
| Brakes | Points | Max | 11 | 3 | level | 0 | 2 | |
| Protection rating | Points | Max | 3 | 18 | level | 0 | 2 | |
| Price | Polish new zloty [PLN] | Min | 0 | 20 | pseudo | 40 | 1000 | |
| Alternative | VSS Client (dm1) (PROMETHEE II) | VSS Owner (dm2) (PROMETHEE II) | Group (PROSA GDSS) | |||
|---|---|---|---|---|---|---|
| Rank | Rank | Rank | ||||
| A1 | 0.1123 | 7 | 0.0609 | 7 | 0.0320 | 2 |
| A2 | −0.1534 | 16 | 0.0047 | 11 | −0.0805 | 15 |
| A3 | −0.1353 | 15 | −0.0516 | 14 | −0.0710 | 13 |
| A4 | 0.1596 | 6 | −0.0076 | 12 | −0.0040 | 5 |
| A5 | −0.0753 | 14 | 0.0661 | 6 | −0.0395 | 10 |
| A6 | 0.1712 | 5 | 0.0056 | 10 | 0.0029 | 4 |
| A7 | −0.2750 | 19 | 0.2003 | 1 | −0.1444 | 19 |
| A8 | 0.3952 | 1 | 0.1453 | 2 | 0.0763 | 1 |
| A9 | 0.3110 | 3 | −0.1255 | 19 | −0.0659 | 12 |
| A10 | 0.3861 | 2 | −0.0437 | 13 | −0.0229 | 6 |
| A11 | −0.0361 | 10 | −0.2110 | 21 | −0.1108 | 18 |
| A12 | 0.0019 | 9 | −0.0532 | 15 | −0.0279 | 8 |
| A13 | 0.2503 | 4 | −0.1181 | 18 | −0.0620 | 11 |
| A14 | −0.0662 | 12 | −0.1380 | 20 | −0.0724 | 14 |
| A15 | −0.3765 | 21 | −0.0996 | 17 | −0.1977 | 21 |
| A16 | −0.1590 | 17 | 0.0466 | 9 | −0.0835 | 16 |
| A17 | −0.3217 | 20 | −0.0634 | 16 | −0.1689 | 20 |
| A18 | −0.0674 | 13 | 0.1097 | 4 | −0.0354 | 9 |
| A19 | −0.0451 | 11 | 0.0828 | 5 | −0.0237 | 7 |
| A20 | −0.1642 | 18 | 0.1379 | 3 | −0.0862 | 17 |
| A21 | 0.0876 | 8 | 0.0518 | 8 | 0.0272 | 3 |
| Alternative | A1 | A2 | A3 | A4 | A5 | A6 | A7 | A8 | A9 | A10 | A11 | A12 | A13 | A14 | A15 | A16 | A17 | A18 | A19 | A20 | A21 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PROMETHEE GDSS | 0.0454 | −0.039 | −0.0491 | 0.0399 | −0.0024 | 0.0464 | −0.0196 | 0.1419 | 0.0487 | 0.0899 | −0.0648 | −0.0134 | 0.0347 | −0.0536 | −0.125 | −0.0295 | −0.1011 | 0.0111 | 0.0099 | −0.0069 | 0.0366 | |
| Rank | 5 | 16 | 17 | 6 | 11 | 4 | 14 | 1 | 3 | 2 | 19 | 13 | 8 | 18 | 21 | 15 | 20 | 9 | 10 | 12 | 7 | |
| PROSA GDSS | 0.032 | −0.0805 | −0.071 | −0.004 | −0.0395 | 0.0029 | −0.1444 | 0.0763 | −0.0659 | −0.0229 | −0.1108 | −0.0279 | −0.062 | −0.0724 | −0.1977 | −0.0835 | −0.1689 | −0.0354 | −0.0237 | −0.0862 | 0.0272 | |
| Rank | 2 | 15 | 13 | 5 | 10 | 4 | 19 | 1 | 12 | 6 | 18 | 8 | 11 | 14 | 21 | 16 | 20 | 9 | 7 | 17 | 3 | |
| Criteria | VSS Client (dm1)—Criteria Weights | VSS Owner (dm2)—Criteria Weights | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Stability Interval | Sensitivity | Nominal Weight | Stability Interval | Sensitivity | Nominal Weight | |||||
| Min | Max | Min-Nominal | Max-Nominal | Min | Max | Min-Nominal | Max-Nominal | |||
| 0 | 21 | - | 18 | 3 | 8 | 12 | 3 | 1 | 11 | |
| 0 | 11 | - | 11 | 0 | 11 | 12 | 0 | 1 | 11 | |
| 0 | 21 | - | 18 | 3 | 0 | 4 | - | 3 | 1 | |
| 0 | 50 | - | 39 | 11 | 1 | 5 | 2 | 2 | 3 | |
| 0 | 15 | - | 8 | 7 | 0 | 7 | - | 4 | 3 | |
| 0 | 12 | - | 7 | 5 | 0 | 4 | - | 2 | 2 | |
| 0 | 23 | - | 20 | 3 | 0 | 7 | - | 2 | 5 | |
| 0 | 21 | - | 10 | 11 | 0 | 7 | - | 4 | 3 | |
| 0 | 43 | - | 35 | 8 | 2 | 10 | 1 | 7 | 3 | |
| 0 | 7 | - | 6 | 1 | 0 | 15 | - | 15 | 0 | |
| 0 | 22 | - | 15 | 7 | 0 | 4 | - | 1 | 3 | |
| 0 | 11 | - | 6 | 5 | 0 | 18 | - | 16 | 2 | |
| 0 | 9 | - | 6 | 3 | 5 | 9 | 1 | 3 | 6 | |
| 0 | 13 | - | 5 | 8 | 0 | 3 | - | 0 | 3 | |
| 1 | 25 | 10 | 14 | 11 | 3 | 6 | 0 | 3 | 3 | |
| 0 | 58 | - | 47 | 11 | 1 | 11 | 2 | 8 | 3 | |
| 0 | 21 | - | 18 | 3 | 17 | 25 | 1 | 7 | 18 | |
| 0 | 9 | - | 9 | 0 | 17 | 21 | 3 | 1 | 20 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ziemba, P.; Gago, I. Compromise Multi-Criteria Selection of E-Scooters for the Vehicle Sharing System in Poland. Energies 2022, 15, 5048. https://doi.org/10.3390/en15145048
Ziemba P, Gago I. Compromise Multi-Criteria Selection of E-Scooters for the Vehicle Sharing System in Poland. Energies. 2022; 15(14):5048. https://doi.org/10.3390/en15145048
Chicago/Turabian StyleZiemba, Paweł, and Izabela Gago. 2022. "Compromise Multi-Criteria Selection of E-Scooters for the Vehicle Sharing System in Poland" Energies 15, no. 14: 5048. https://doi.org/10.3390/en15145048
APA StyleZiemba, P., & Gago, I. (2022). Compromise Multi-Criteria Selection of E-Scooters for the Vehicle Sharing System in Poland. Energies, 15(14), 5048. https://doi.org/10.3390/en15145048