

A Novel Magnetic Circuit Design Method for a Permanent Magnetic Chuck of a Wall-Climbing Robot

Abstract
:1. Introduction
2. Methods
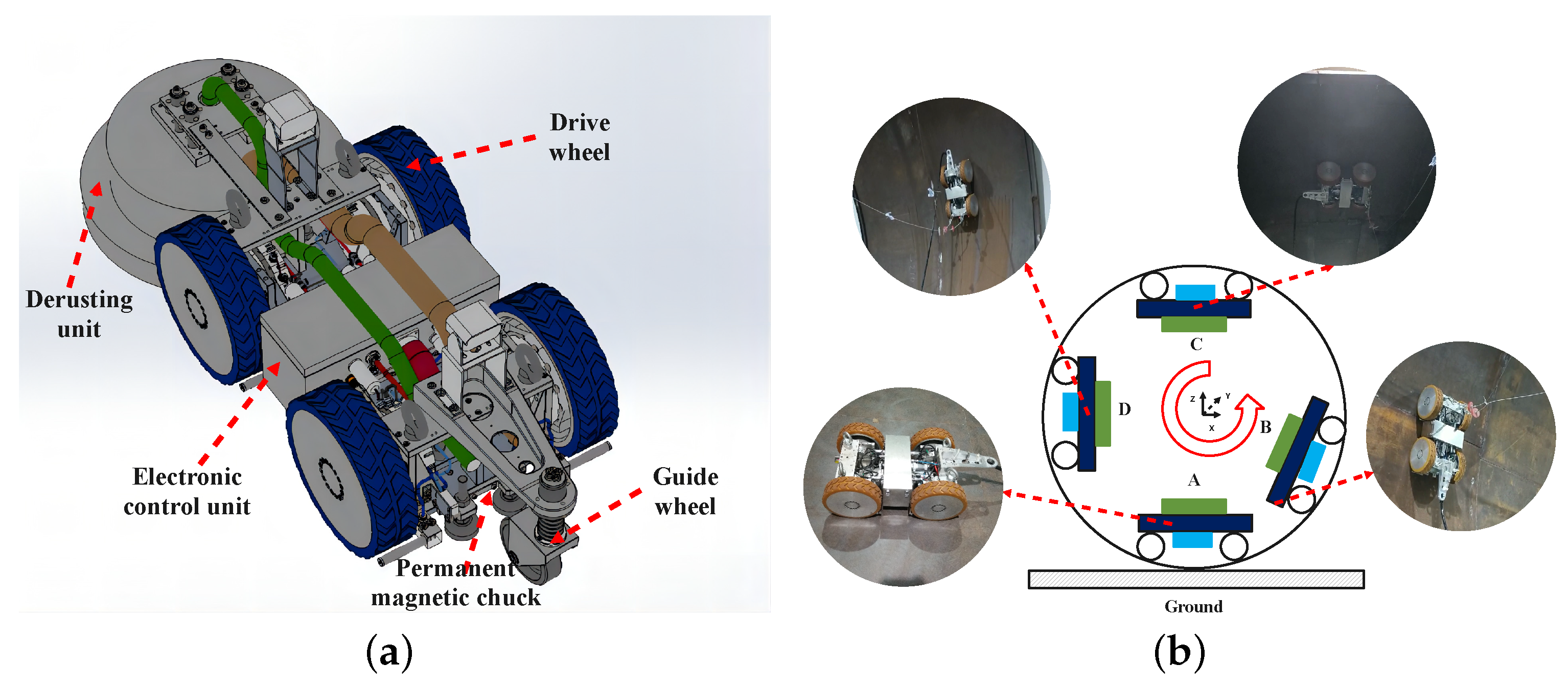
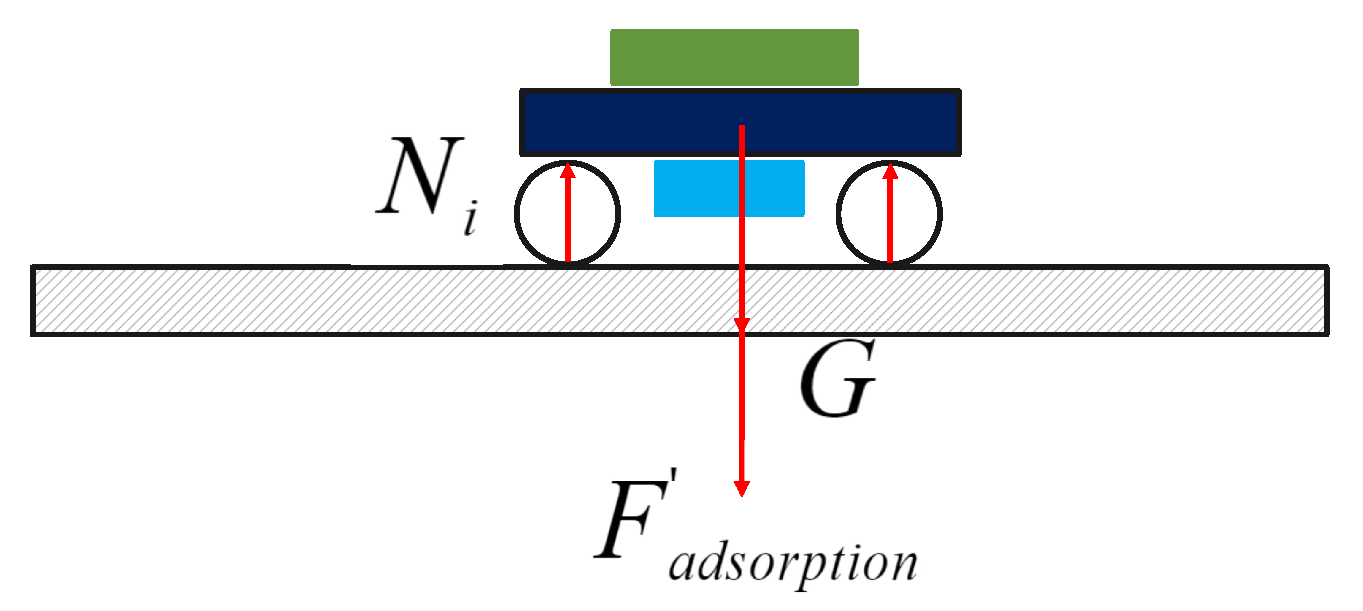
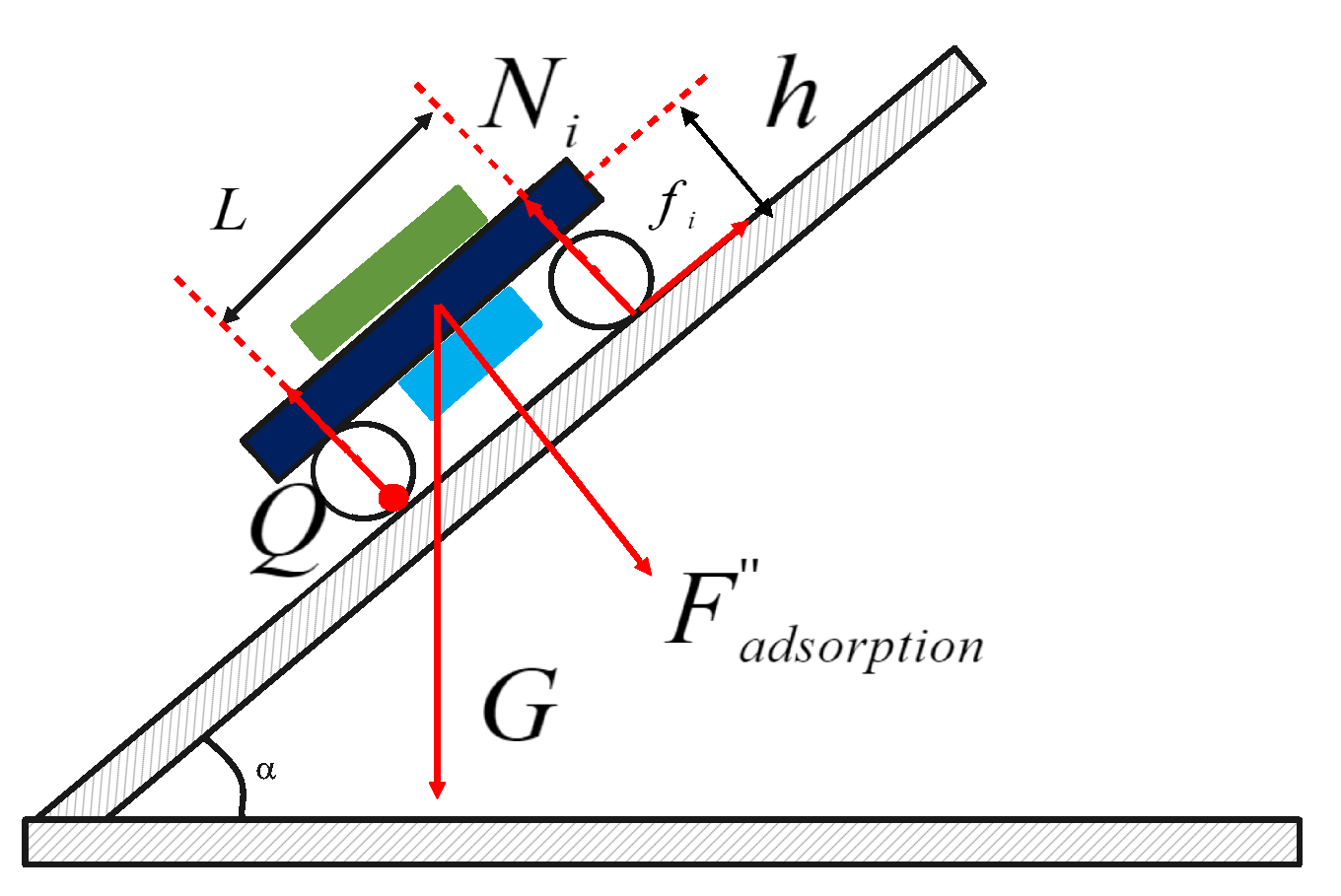
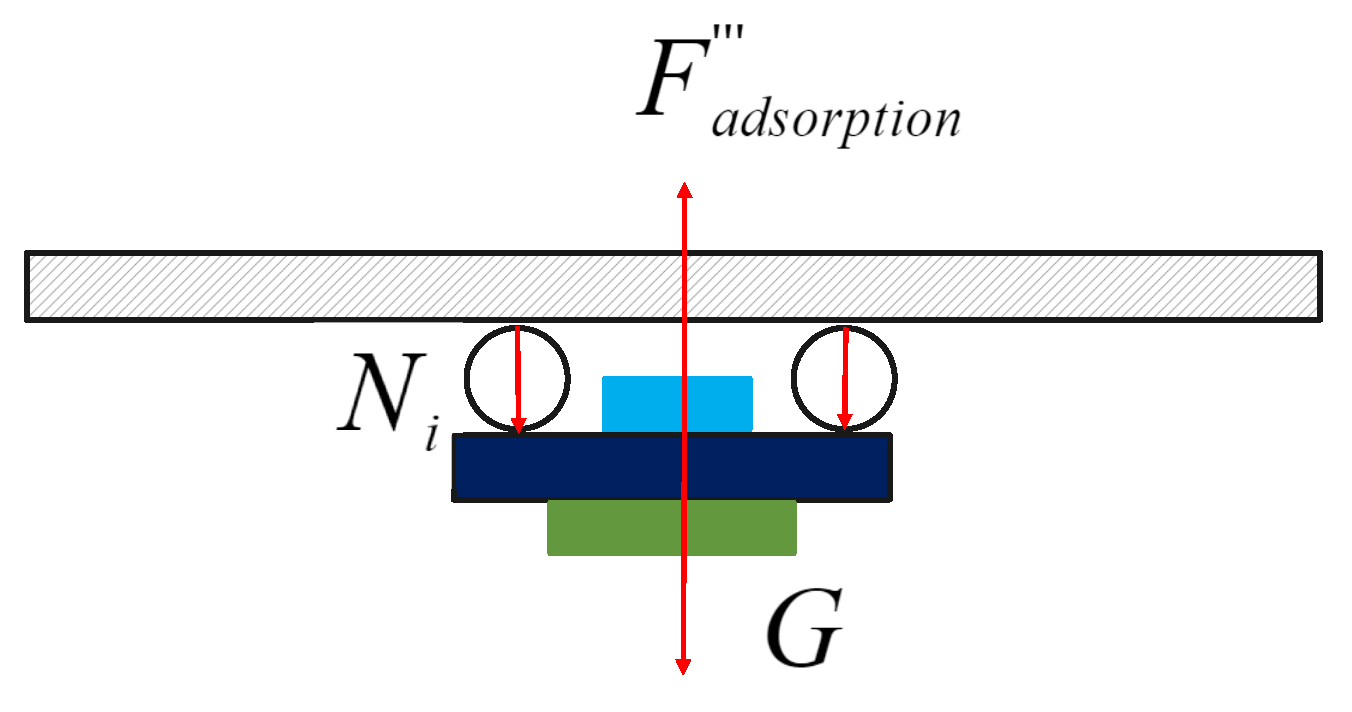
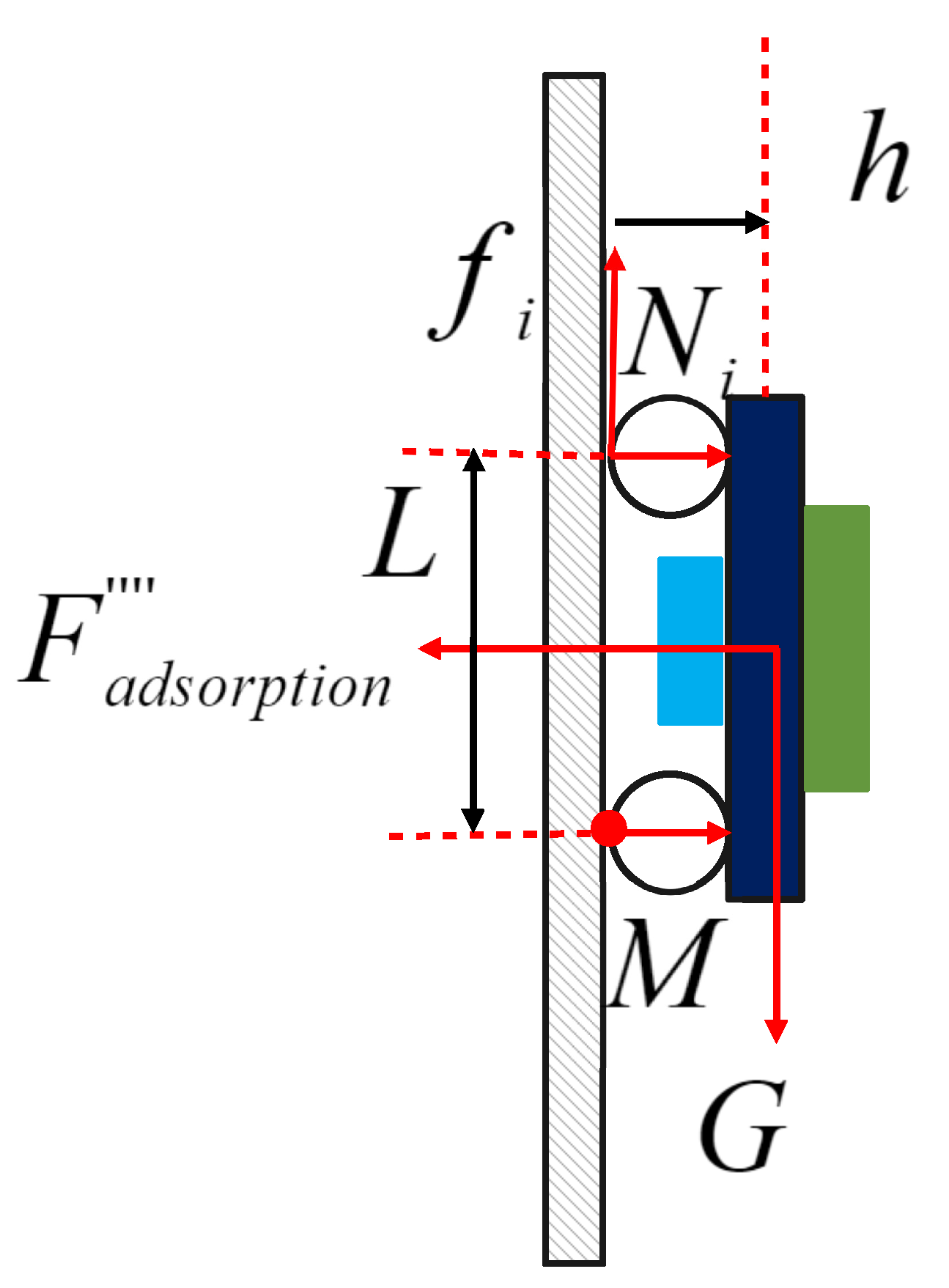
2.1. Static Analysis of Wall-Climbing Robots under Different Working Conditions
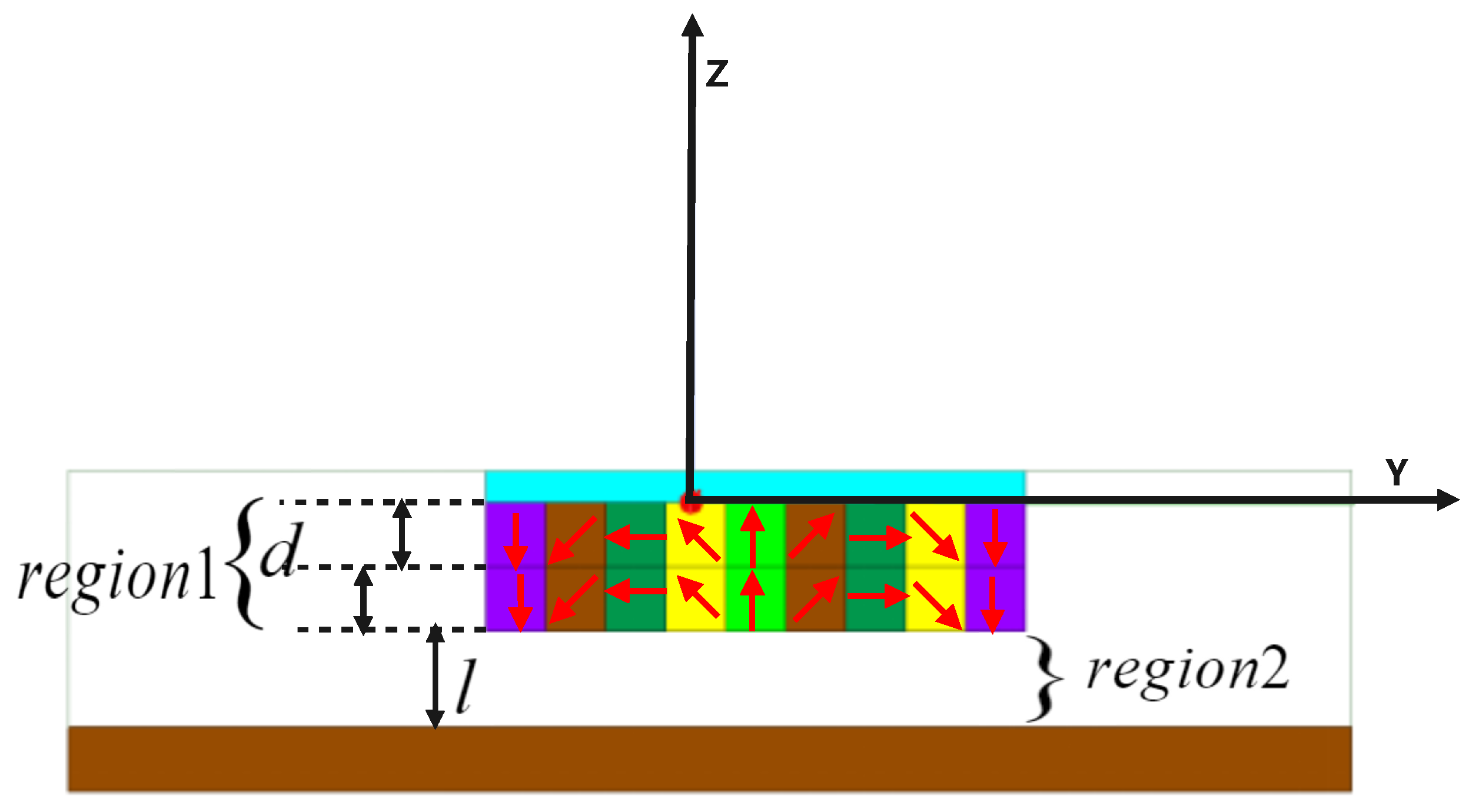
2.2. Modeling and Analysis of the Double-Layer Superimposed Halbach Array
- (1)
- The length of a nonideal Halbach array composed of segmented permanent magnets bonded together is unlimited, and the end effect of the Halbach array is not considered.
- (2)
- The demagnetization curve of a permanent magnet is linear, and its permeability is the same as that of air. The return permeability is .
- (3)
- The study area is an ideal space without free current.
- (4)
- The permeability of soft magnetic materials is infinite.
- (5)
- The magnetic energy loss on the yoke is not considered.
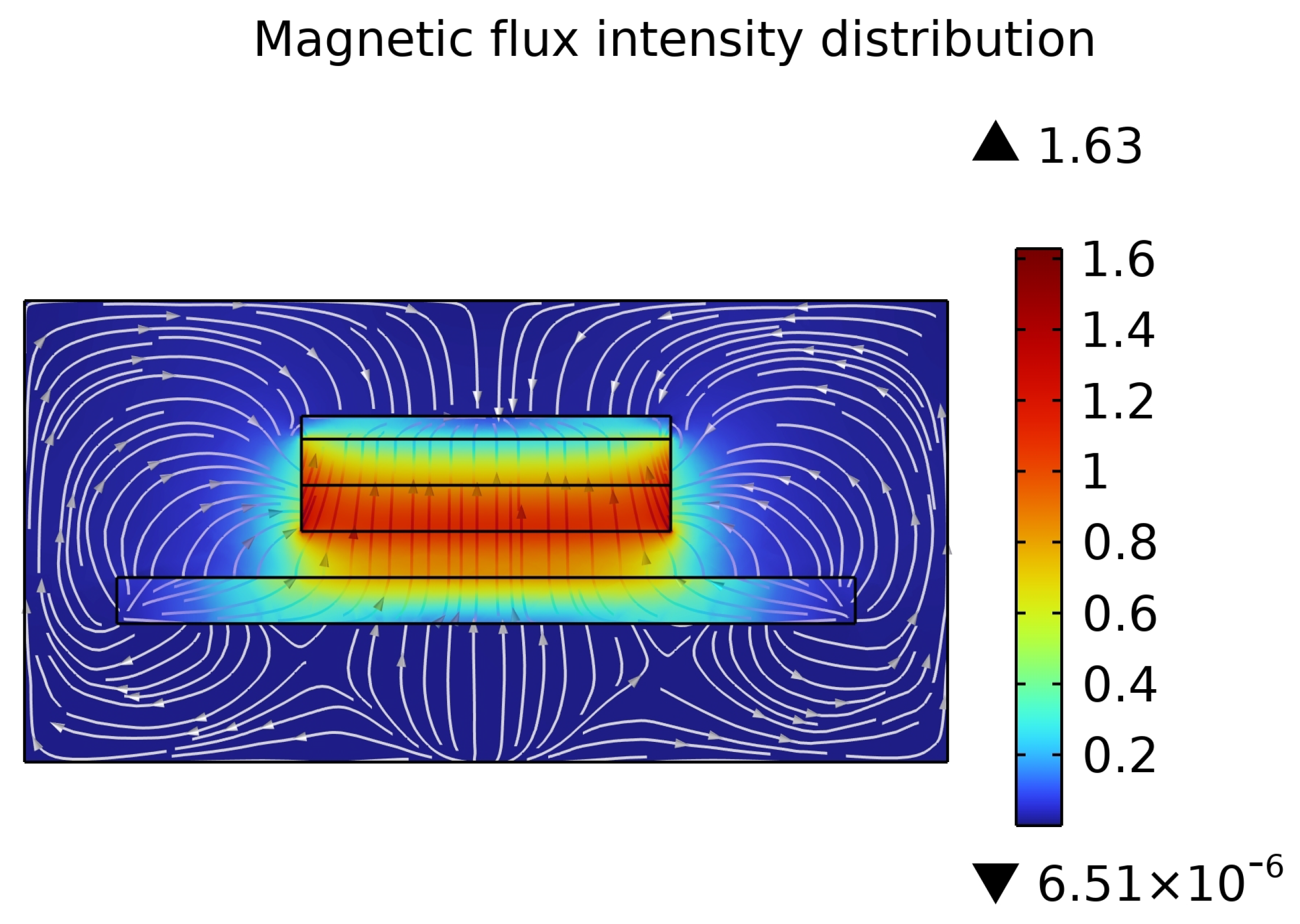
3. Results
- (1)
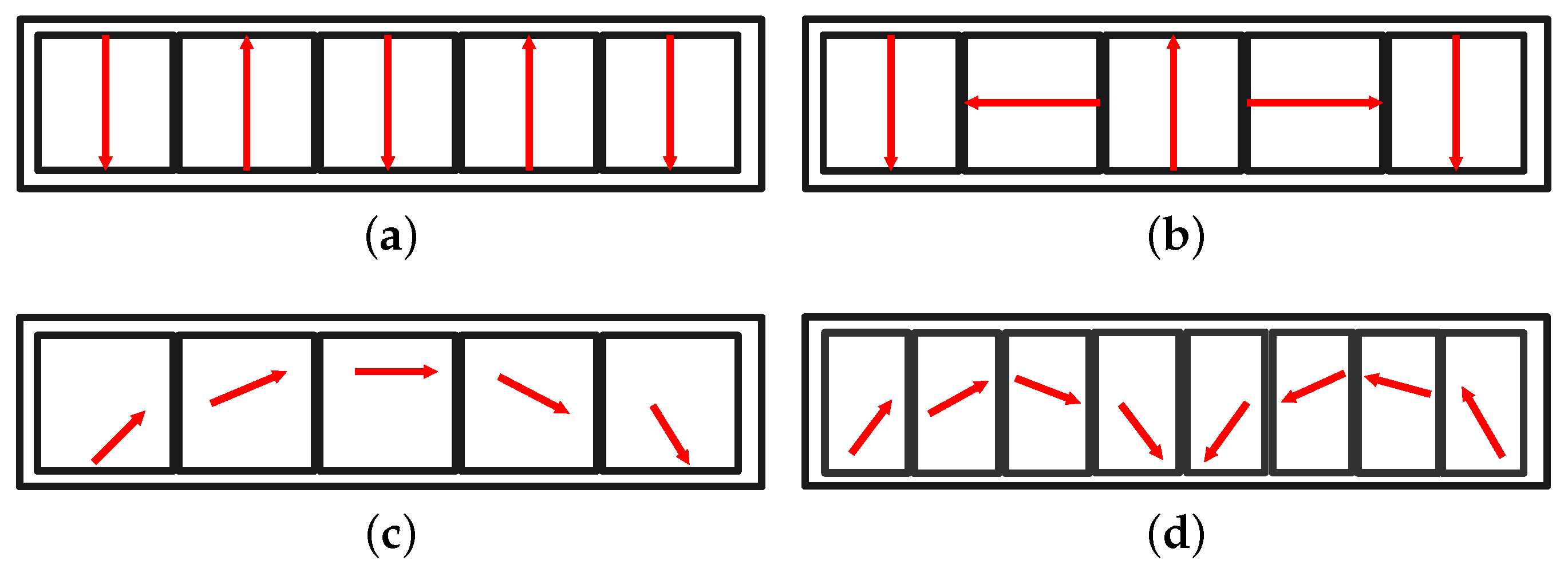
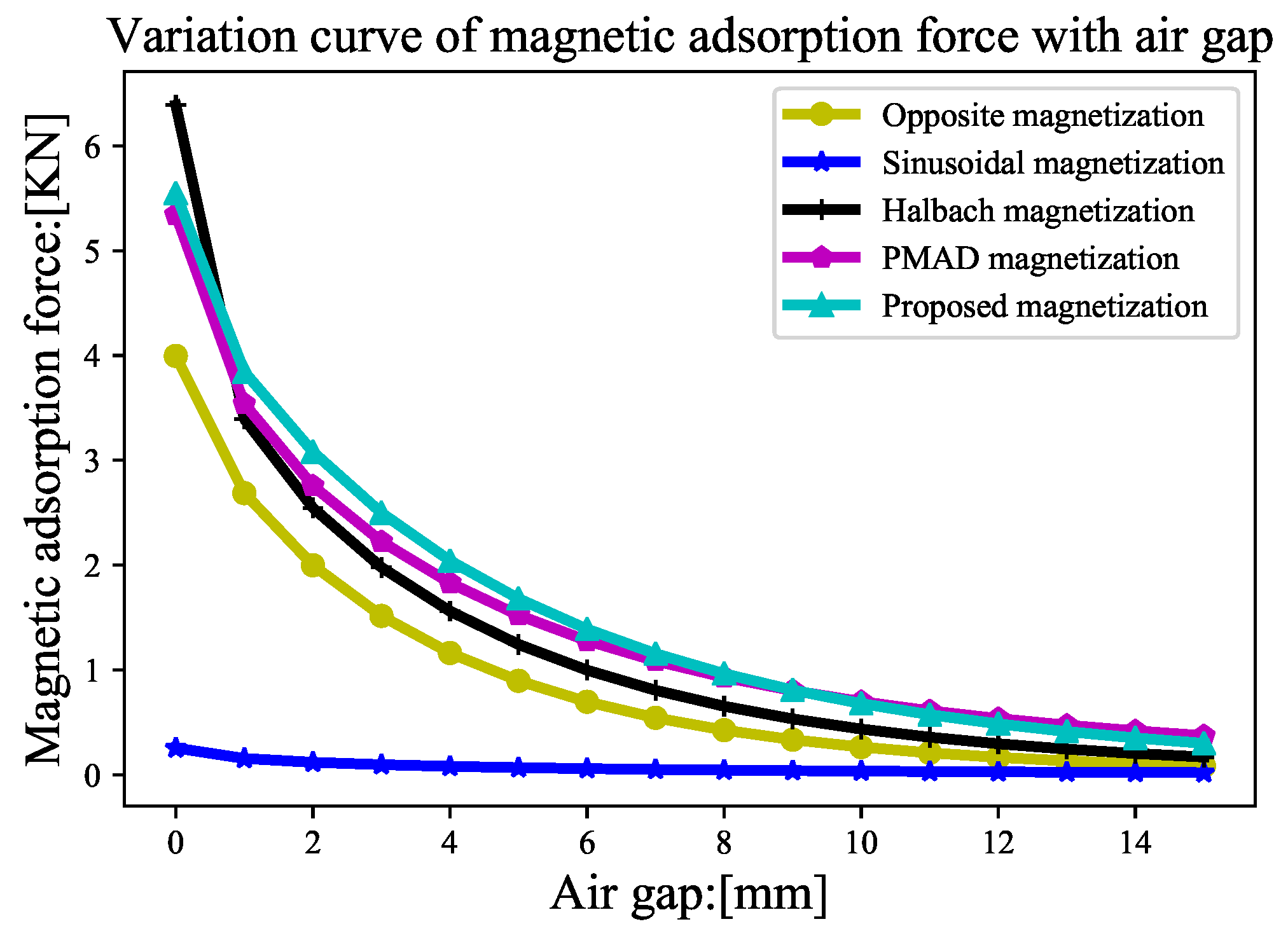
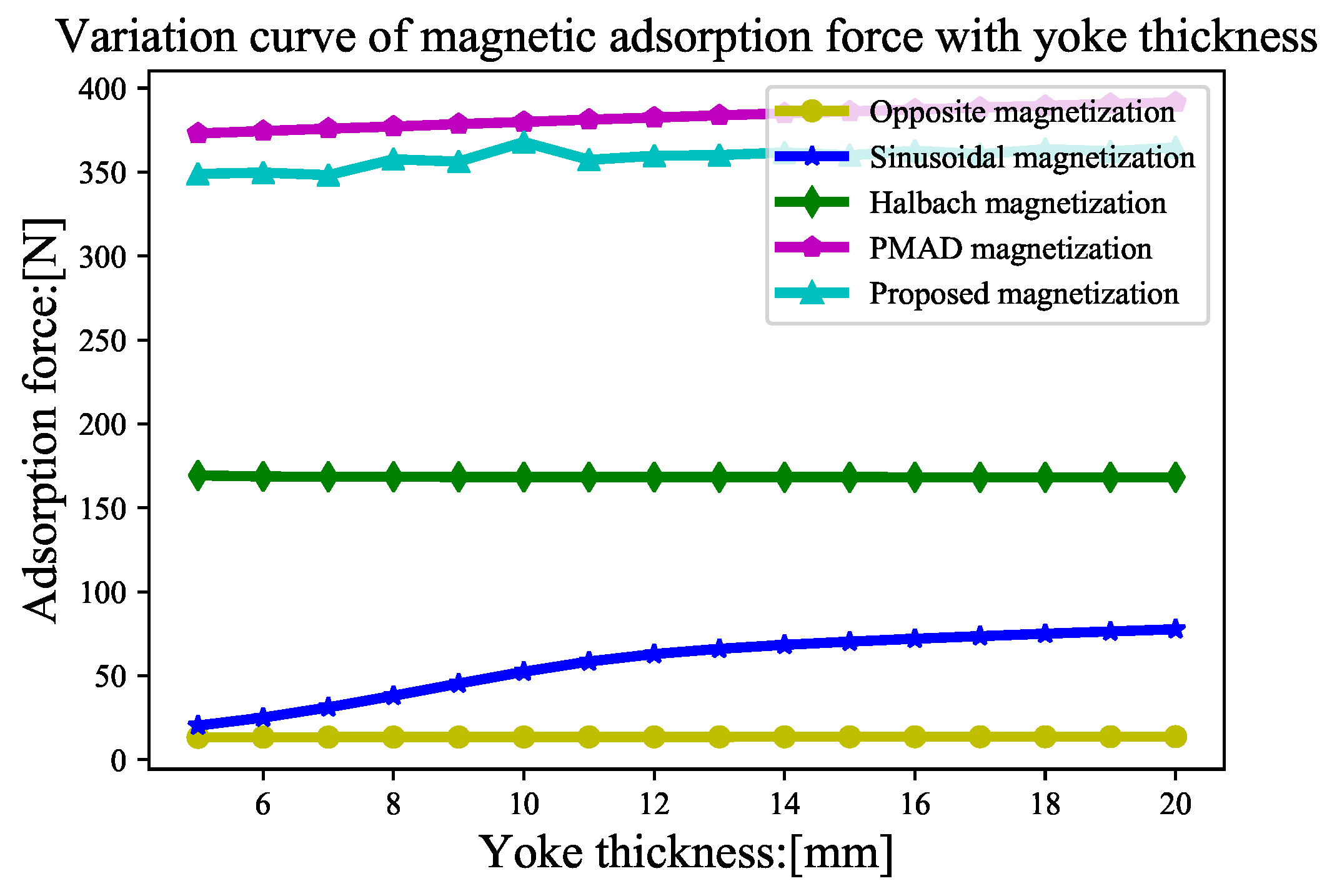
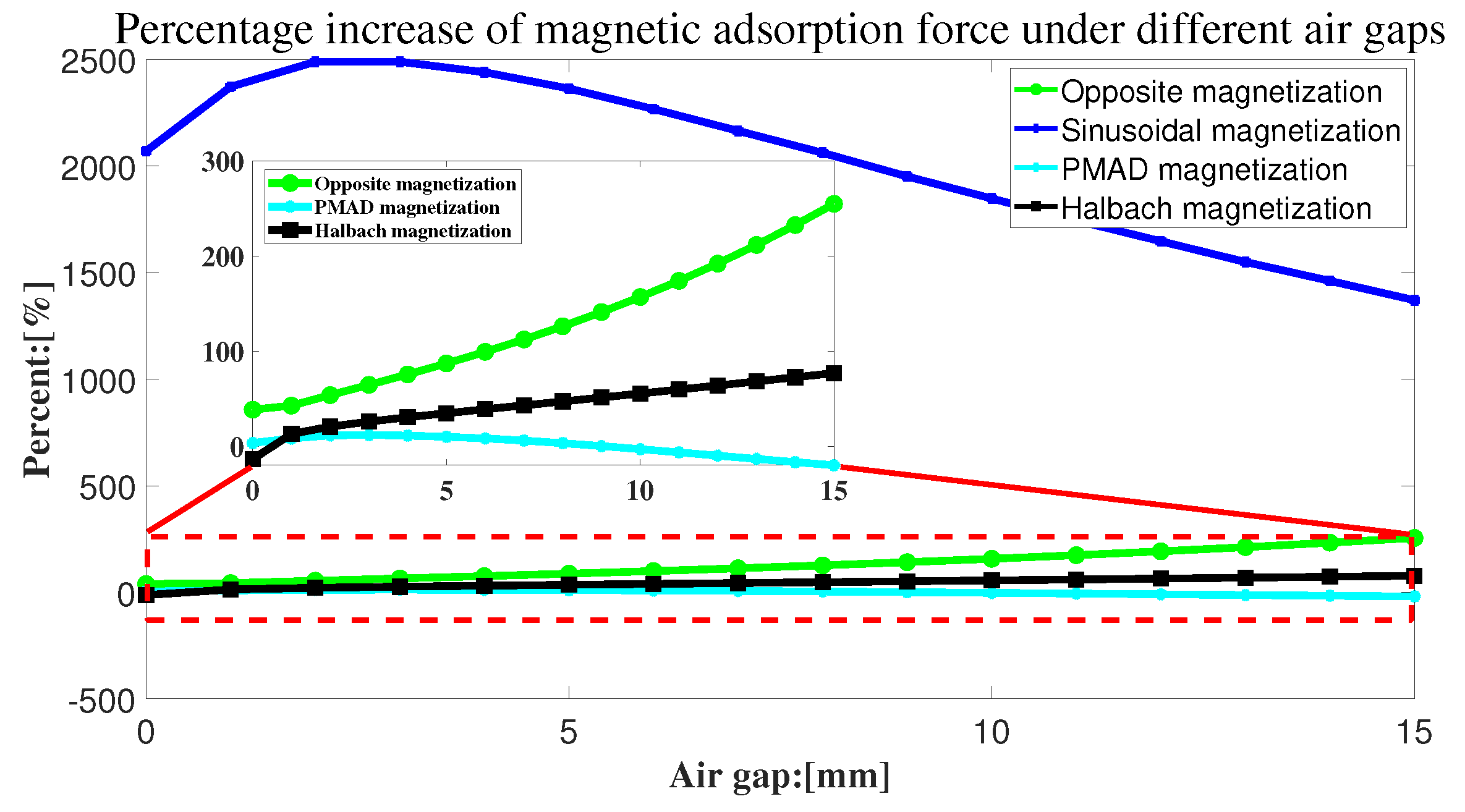
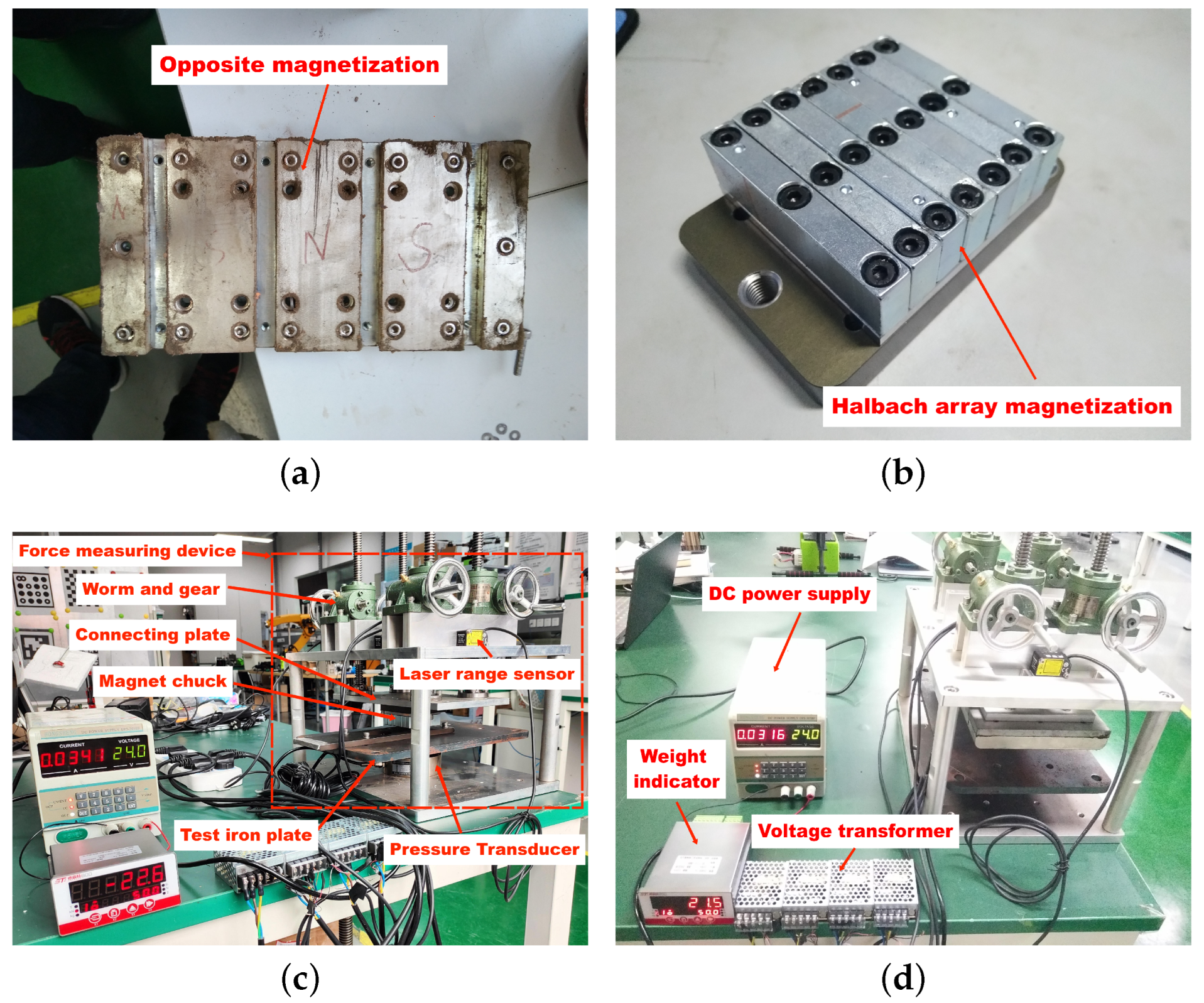
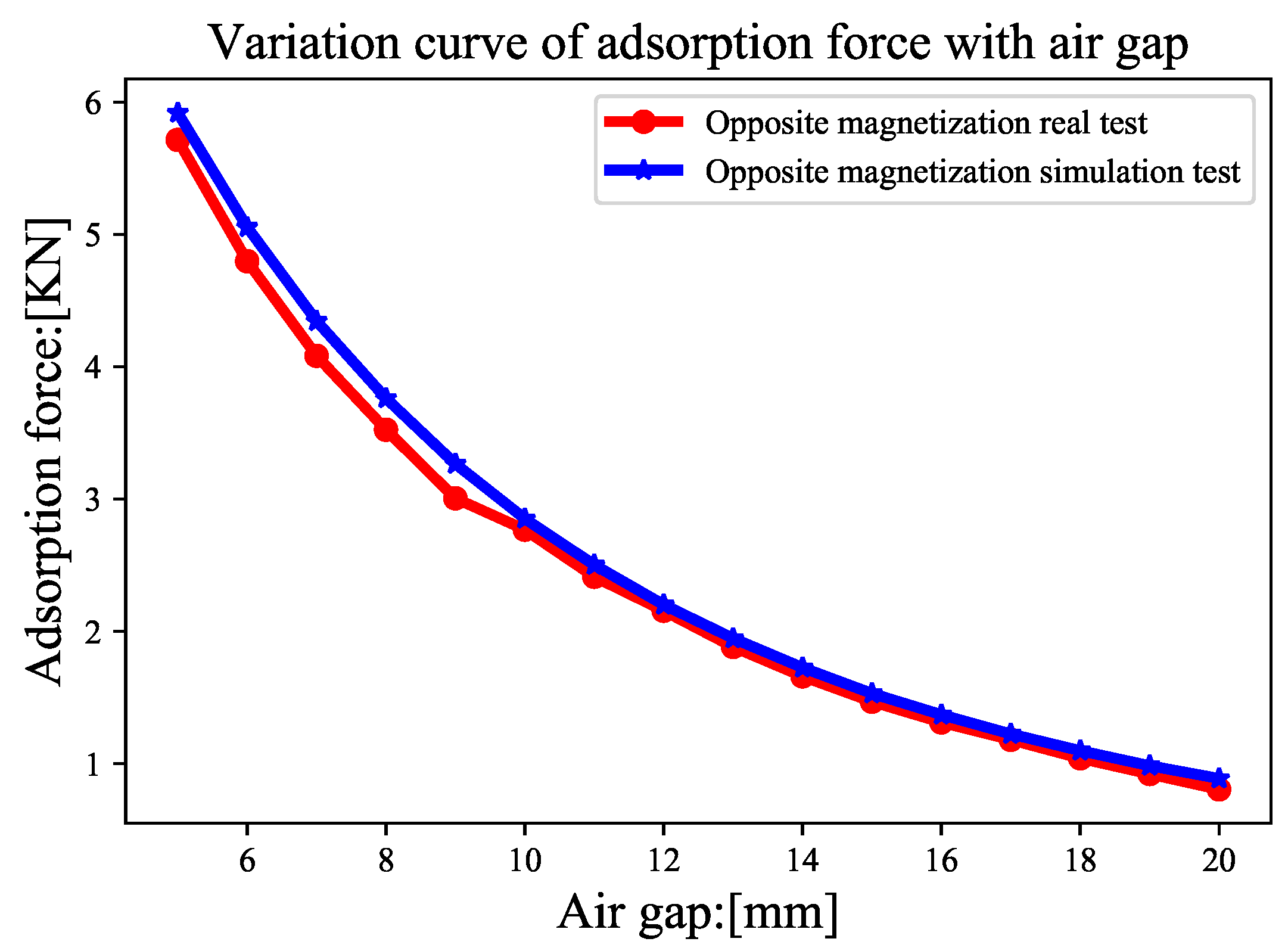
- Opposite magnetization. The permanent magnetic chuck is composed of five magnetic poles, of which two magnetic poles with a size of mm are arranged at the edge, and the remaining three magnetic poles with a size of mm are arranged in the middle. The magnetization direction between adjacent magnetic poles is opposite. The magnetic pole is magnetized according to the magnetization method shown in Figure 8a.
- (2)
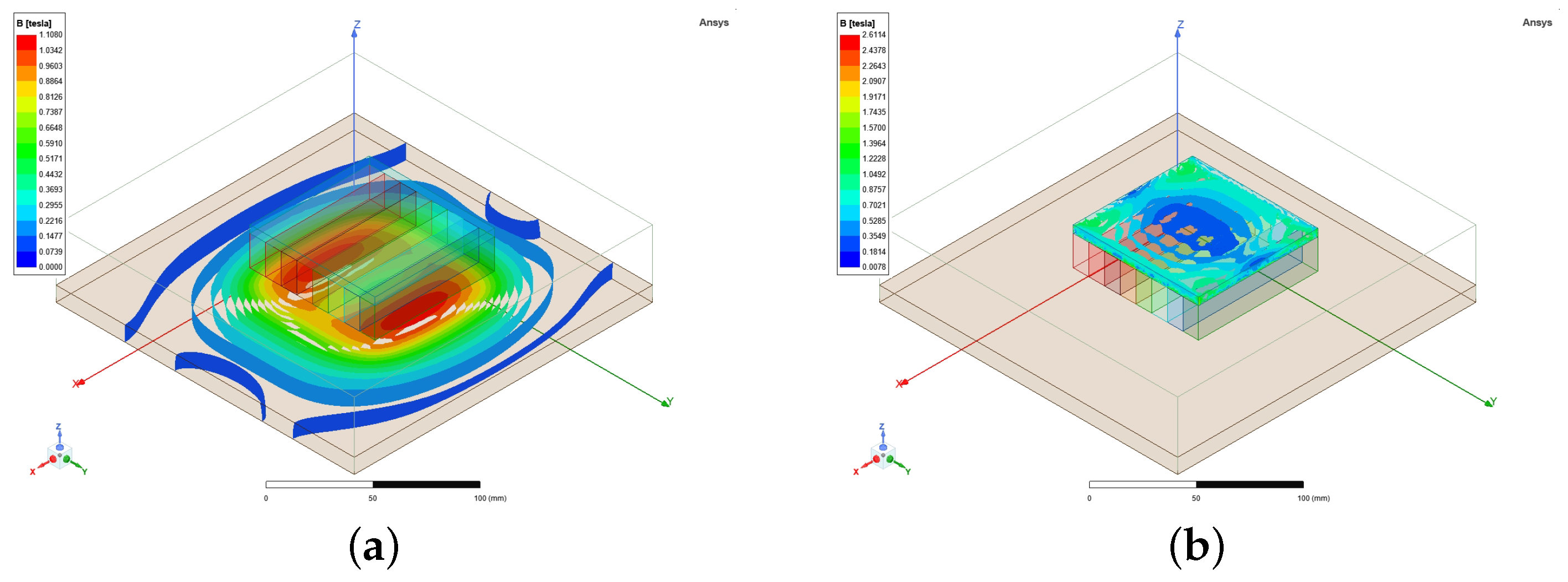
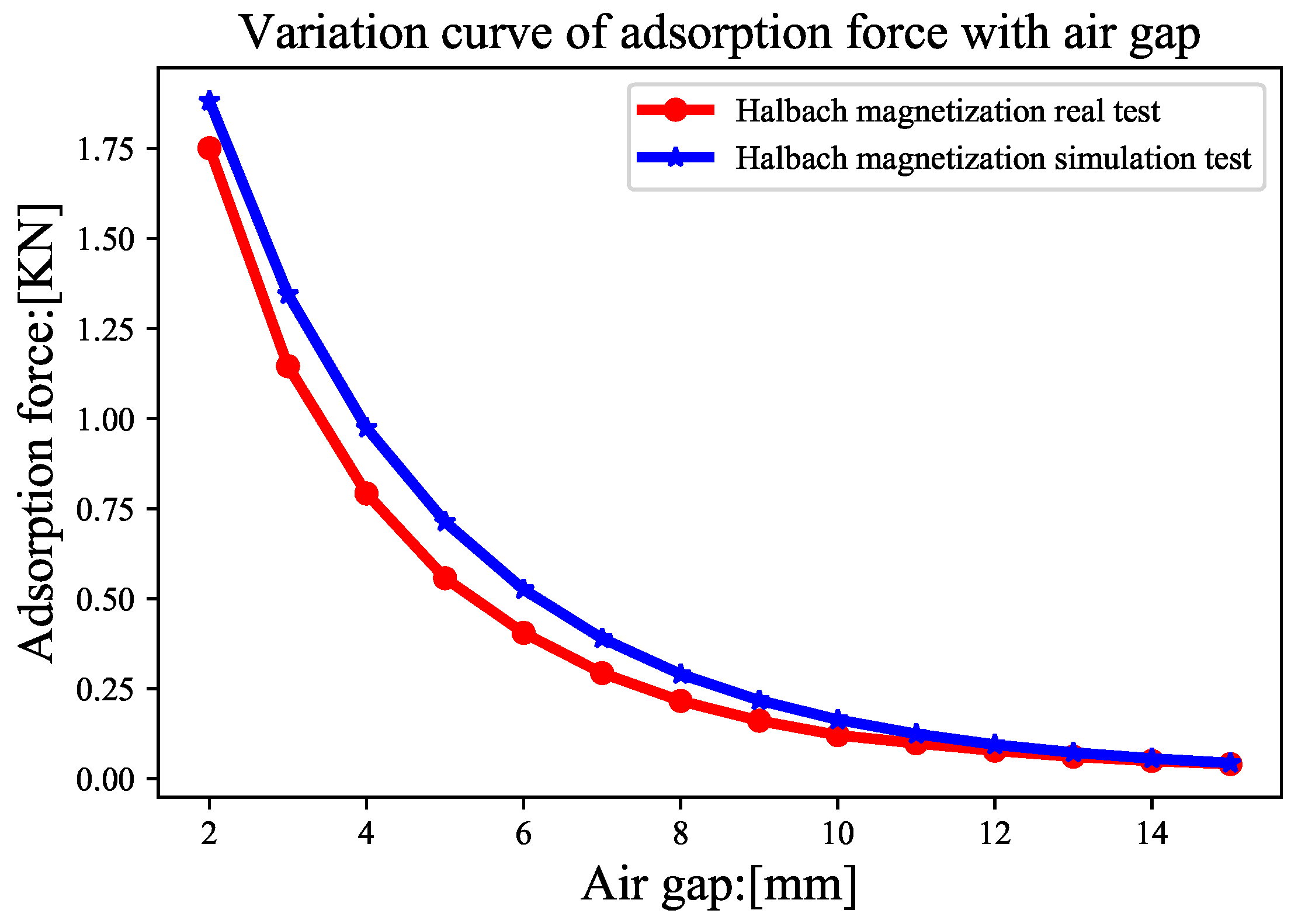
- Halbach array magnetization. The permanent magnetic chuck is composed of five magnetic poles with a size of mm. The magnetic pole is magnetized according to the magnetization method shown in Figure 8b.
- (3)
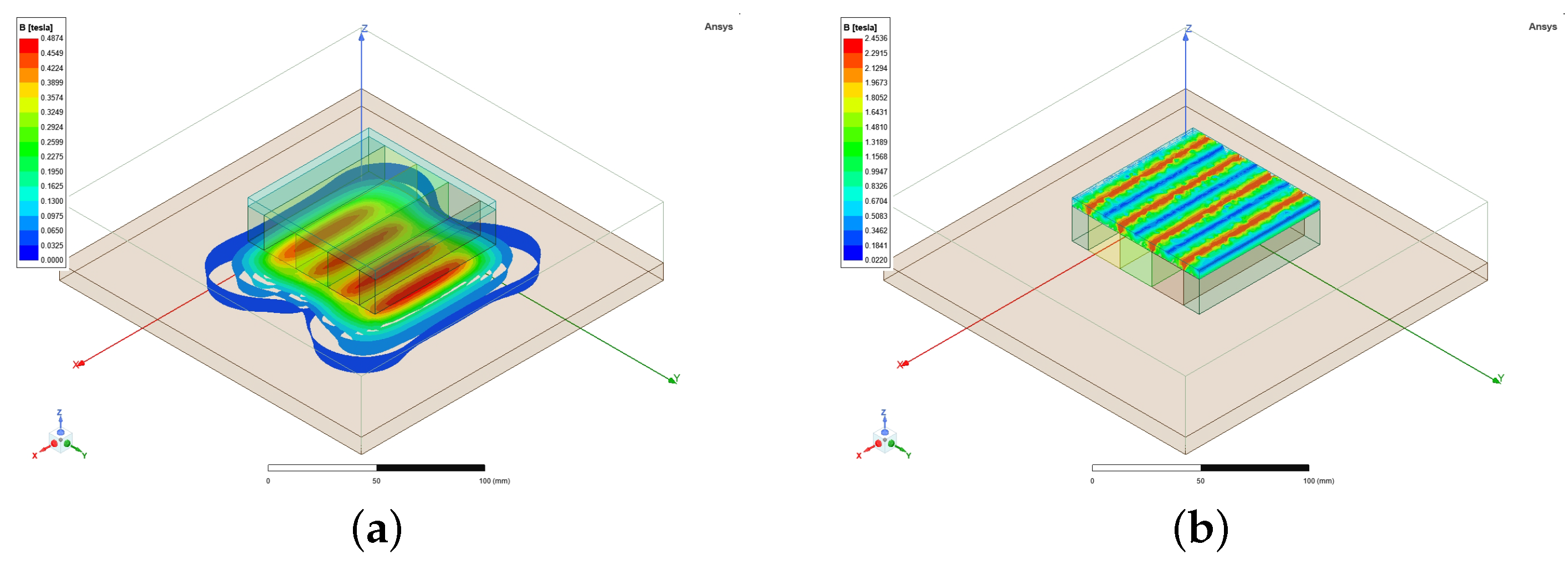
- Sinusoidal magnetization. The permanent magnetic chuck is composed of 18 magnetic poles with a size of mm. The magnetic pole is magnetized according to the magnetization method shown in Figure 8c. The included angle of the magnetization direction between adjacent magnetic poles is .
- (4)
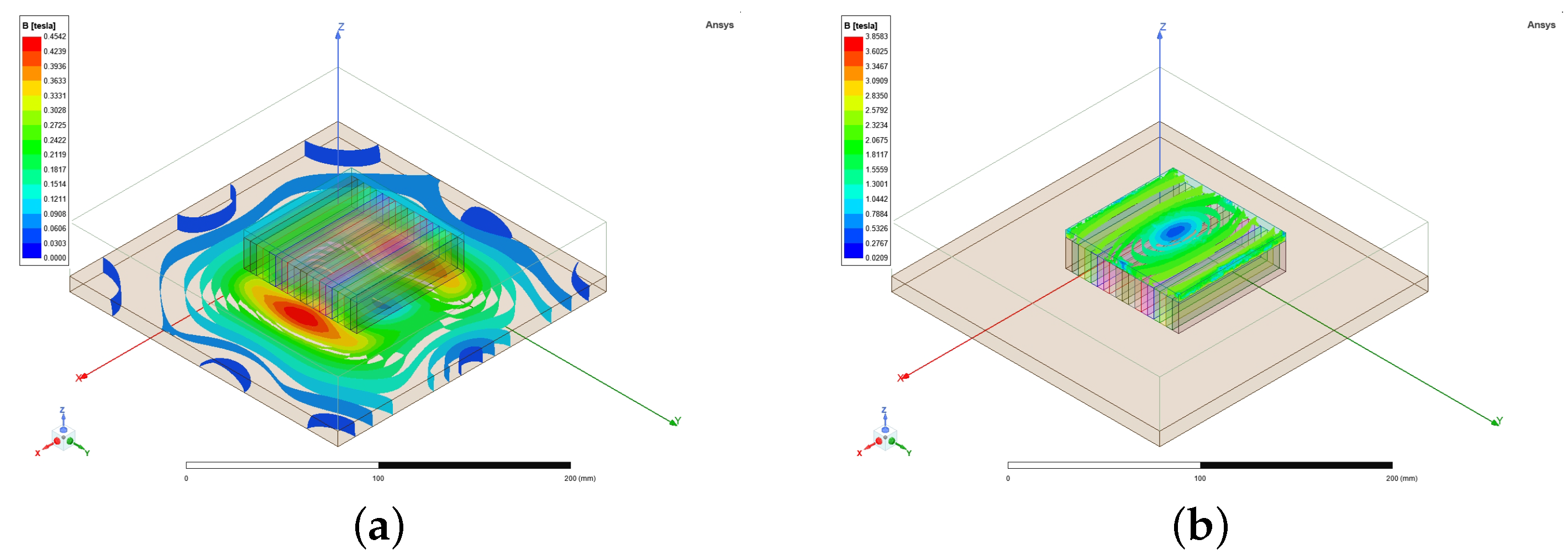
- Multidirectional magnetization (PMAD). The permanent magnetic chuck is composed of eight magnetic poles with a size of mm. The magnetization direction of the magnetic poles adopts a symmetrical form. The magnetic poles are magnetized in the directions of , , , , , , and according to Yan [31].
- (5)
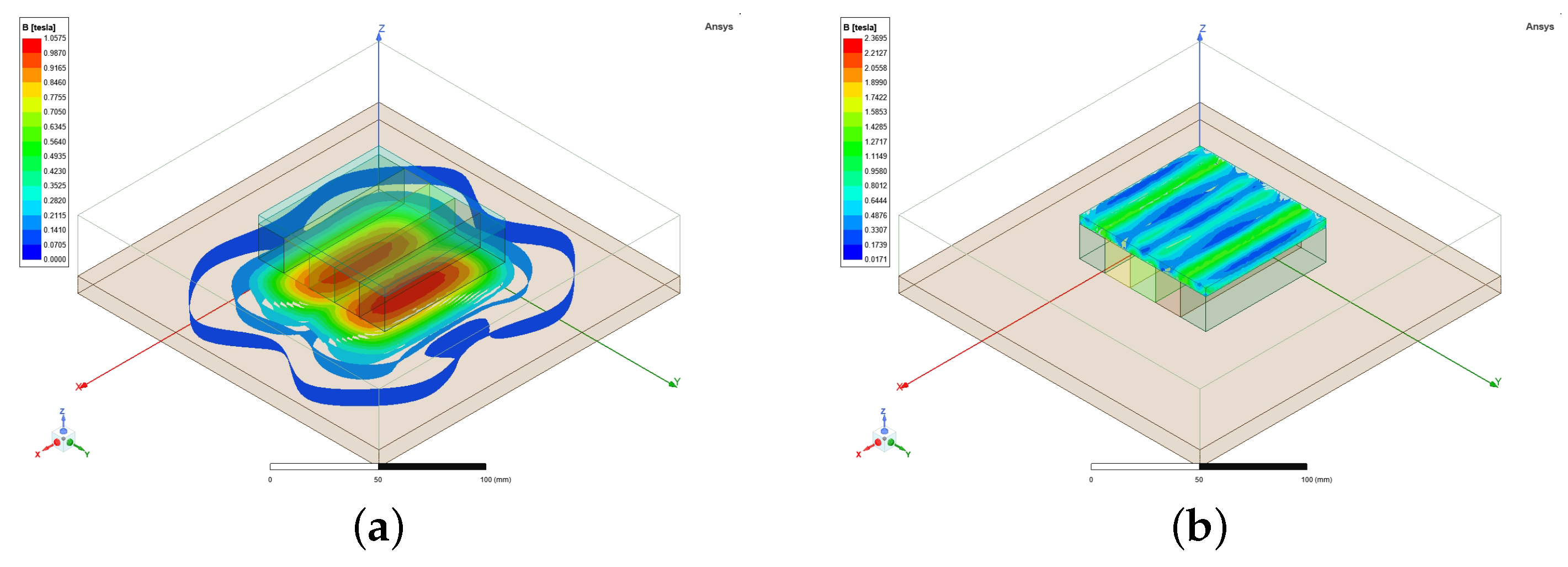
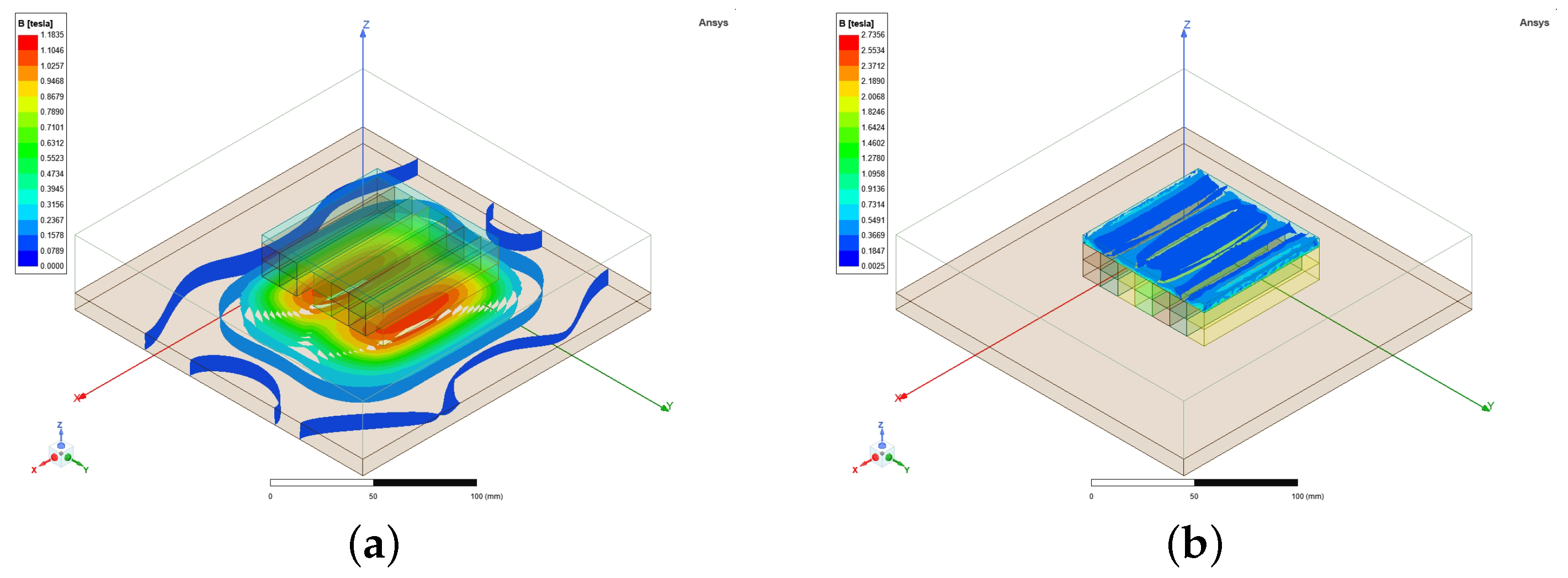
- Double-layer superimposed Halbach array magnetization. The permanent magnetic chuck is composed of 18 magnetic poles, and the size of a single magnetic pole is mm. The magnetic poles are magnetized according to the magnetization method shown in Figure 6.
4. Discussion
5. Conclusions
- (1)
- A double-layer superposition Halbach array magnetization method is proposed.
- (2)
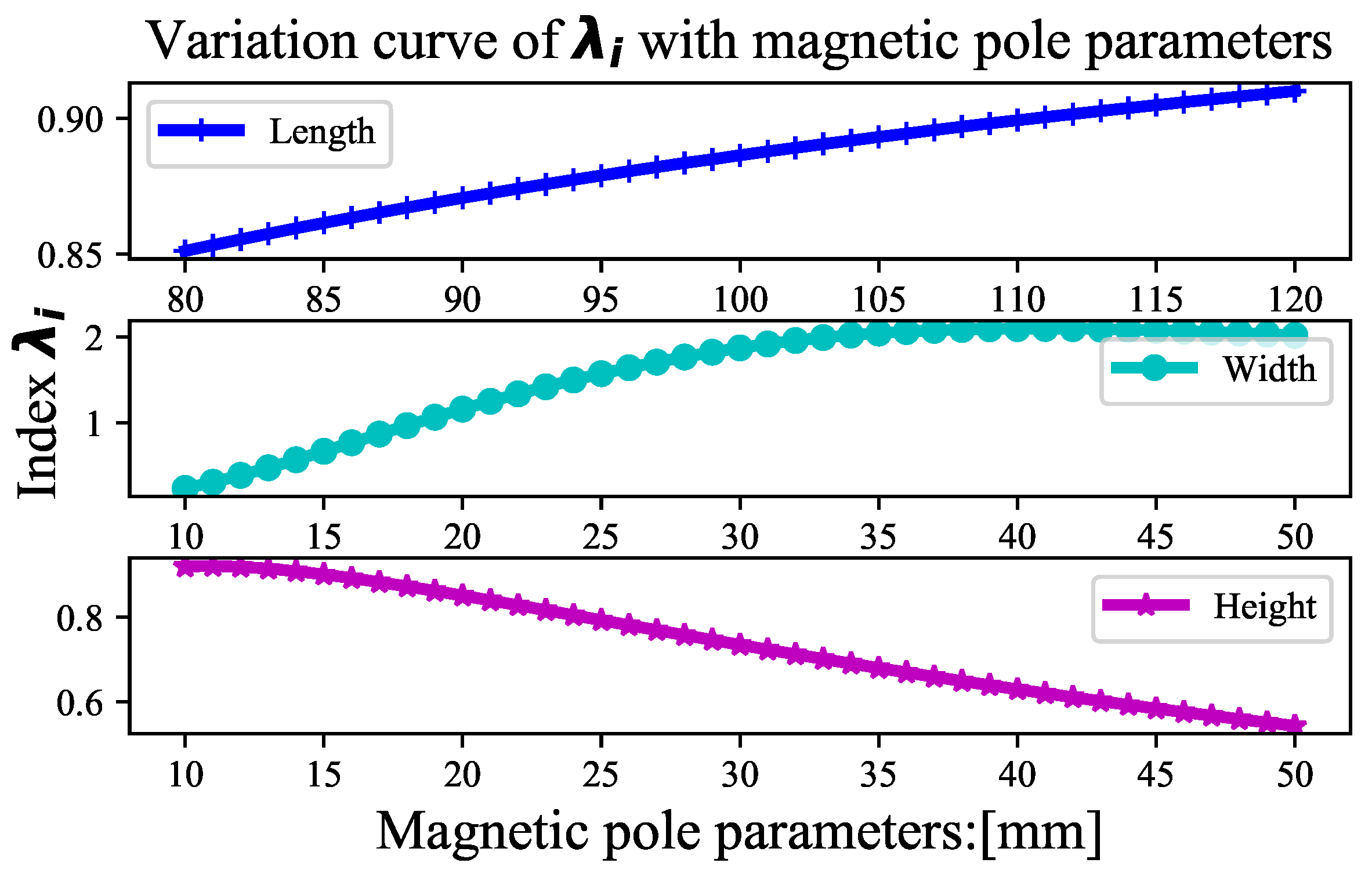
- An index for evaluating magnetic energy utilization based on magnetic pole size parameters is defined.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nansai, S.; Mohan, R.E. A survey of wall-climbing robots: Recent advances and challenges. Robotics 2016, 5, 14. [Google Scholar] [CrossRef]
- Dethe, R.D.; Jaju, S. Developments in wall-climbing robots: A review. Int. J. Eng. Res. Gen. Sci. 2014, 2, 33–42. [Google Scholar]
- Chu, B.; Jung, K.; Han, C.S.; Hong, D. A survey of climbing robots: Locomotion and adhesion. Int. J. Precis. Eng. Manuf. 2010, 11, 633–647. [Google Scholar] [CrossRef]
- Vlasova, N.S.; Bykov, N.V. The problem of adhesion methods and locomotion mechanism development for wall-climbing robots. arXiv 2019, arXiv:1905.09214. [Google Scholar]
- Silva, M.F.; Machado, J.T. A survey of technologies and applications for climbing robots locomotion and adhesion. In Climbing and Walking Robots; Springer: Berlin/Heidelberg, Germany, 2010; pp. 1–22. [Google Scholar]
- Zhang, R. Design and Implementation of an Autonomous Climbing Robot. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 2012. [Google Scholar]
- Silva, M.; Barbosa, R.; Oliveira, A. Magnetic wheeled climbing robot: Design and implementation. Comput. Intell. Decis. Mak. 2013, 61, 301–311. [Google Scholar]
- Schmidt, D.; Berns, K. Climbing robots for maintenance and inspections of vertical structures—A survey of design aspects and technologies. Robot. Auton. Syst. 2013, 61, 1288–1305. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, X.; Li, M.; Cao, J.; Huang, Z. Optimization Design and Flexible Detection Method of a Surface Adaptation Wall-Climbing Robot with Multisensor Integration for Petrochemical Tanks. Sensors 2020, 20, 6651. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, X.; Zhang, M.; Sun, L.; Li, M. Optimization Design and Flexible Detection Method of Wall-Climbing Robot System with Multiple Sensors Integration for Magnetic Particle Testing. Sensors 2020, 20, 4582. [Google Scholar] [CrossRef]
- Xu, Z.; Ma, P. A wall-climbing robot for labelling scale of oil tank’s volume. Robotica 2002, 20, 209–212. [Google Scholar] [CrossRef]
- Liu, J.; Yu, H.; Mei, L.; Han, B. Development of a new type of automatic magnetic particle inspection wall-climbing robot. Adv. Mech. Eng. 2021, 13, 168781402110473. [Google Scholar] [CrossRef]
- Mahmood, S.K.; Bakhy, S.H.; Tawfik, M.A. Magnetic–type Climbing Wheeled Mobile Robot for Engineering Education. In Proceedings of the 2nd International Scientific Conference of Al-Ayen University (ISCAU-2020), Online, Iraq, 15–16 July 2020. [Google Scholar]
- Howlader, M.O.F.; Sattar, T.P. Development of magnetic adhesion based climbing robot for non-destructive testing. In Proceedings of the 7th Computer Science and Electronic Engineering Conference (CEEC-2015), Colchester, UK, 24–25 September 2015. [Google Scholar]
- Lee, W.; Hirai, M.; Hirose, S. Gunryu III: Reconfigurable magnetic wall-climbing robot for decommissioning of nuclear reactor. Adv. Robot. 2013, 27, 1099–1111. [Google Scholar] [CrossRef]
- Eto, H.; Asada, H.H. Development of a Wheeled Wall-Climbing Robot with a Shape-Adaptive Magnetic Adhesion Mechanism. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May– 31 August 2020. [Google Scholar]
- Silva, M.F.; Barbosa, R.S.; Oliveira, A.L. Climbing robot for ferromagnetic surfaces with dynamic adjustment of the adhesion system. J. Robot. 2012, 2012, 906545. [Google Scholar] [CrossRef]
- Howlader, M.O.F.; Sattar, T.P. Design and optimization of permanent magnet based adhesion module for robots climbing on reinforced concrete surfaces. Intell. Syst. Appl. 2016, 650, 153–171. [Google Scholar]
- Ding, W.; Wang, X.; Tang, C. Structural design of permanent magnet adsorption tracked ship wall-climbing robot. Hydromechatron. Eng. 2016, 44, 6–11. [Google Scholar]
- Gao, X.; Shao, J.; Dai, F.; Zong, C.; Guo, W.; Bai, Y. Strong magnetic units for a wind power tower inspection and maintenance robot. Int. J. Adv. Robot. Syst. 2012, 9, 189. [Google Scholar] [CrossRef]
- Espinoza, R.V.; de Oliveira, A.S.; de Arruda, L.V.R.; Junior, F.N. Navigation’s stabilization system of a magnetic adherence-based climbing robot. J. Intell. Robot. Syst. 2015, 78, 65–81. [Google Scholar] [CrossRef]
- Han, S.C.; Kim, J.; Yi, H.C. A novel design of permanent magnet wheel with induction pin for mobile robot. Int. J. Precis. Eng. Manuf. 2009, 10, 143–146. [Google Scholar] [CrossRef]
- Zhang, Y.; Dai, Z.; Xu, Y.; Qian, R. Design and adsorption force optimization analysis of TOFD-based weld inspection robot. In Proceedings of the Second International Conference on Mechanical, Electric and Industrial Engineering, Hangzhou, China, 25–27 May 2019. [Google Scholar]
- Fischer, W.; Tâche, F.; Siegwart, R. Inspection system for very thin and fragile surfaces, based on a pair of wall-climbing robots with magnetic wheels. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007. [Google Scholar]
- Noh, M.; Kwon, E.; Park, S.H.; Park, Y.W. Modeling of attractive force by magnetic wheel used for mobile robot. Actuators 2020, 9, 67. [Google Scholar] [CrossRef]
- Xu, Z.; Xie, Y.; Zhang, K.; Hu, Y.; Zhu, X.; Shi, H. Design and optimization of a magnetic wheel for a grit-blasting robot for use on ship hulls. Robotica 2017, 35, 712–728. [Google Scholar] [CrossRef]
- Wu, M.; Pan, G.; Zhang, T.; Chen, S.; Zhuang, F.; Zhao, Y.-Z. Design and optimal research of a non-contact adjustable magnetic adhesion mechanism for a wall-climbing welding robot. Int. J. Adv. Robot. Syst. 2013, 10, 63. [Google Scholar] [CrossRef]
- Song, W.; Jiang, H.; Wang, T.; Ji, D.; Zhu, S. Design of permanent magnetic wheel type adhesion locomotion system for water jetting wall-climbing robot. Adv. Mech. Eng. 2018, 10, 1687814018787378. [Google Scholar] [CrossRef]
- Zhu, J.; Sun, Z.; Huang, W.; Chen, Q. Design of a Master-Slave Composite Wall-Climbing Robot System for Penstock Assembly Welding. In Proceedings of the 12th International Conference on Intelligent Robotics and Applications (ICIRA 2019), Shenyang, China, 8–11 August 2019. [Google Scholar]
- Shen, W.; Gu, J.; Shen, Y. Permanent magnetic system design for the wall-climbing robot. In Proceedings of the IEEE International Conference Mechatronics and Automation, Niagara Falls, ON, Canada, 29 July–1 August 2005. [Google Scholar]
- Yan, C.; Sun, Z.; Zhang, W.; Chen, Q. Design of novel multidirectional magnetized permanent magnetic adsorption device for wall-climbing robots. Int. J. Precis. Eng. Manuf. 2016, 17, 871–878. [Google Scholar] [CrossRef]
- Liu, G.; Hou, S.; Xu, X.; Xiao, W. Design of a New 1D Halbach Magnet Array with Good Sinusoidal Magnetic Field by Analyzing the Curved Surface. Sensors 2021, 21, 2522. [Google Scholar] [CrossRef]
- Wang, J.; Li, C.; Li, Y.; Yan, L. Optimization design of linear Halbach array. In Proceedings of the 2008 International Conference on Electrical Machines and Systems, Wuhan, China, 17–20 October 2008. [Google Scholar]
- Sim, M.S.; Ro, J.S. Semi-analytical modeling and analysis of Halbach array. Energies 2020, 13, 1252. [Google Scholar] [CrossRef]
- Lee, J.; Nomura, T.; Dede, E.M. Topology optimization of Halbach magnet arrays using isoparametric projection. J. Magn. Magn. Mater. 2017, 432, 140–153. [Google Scholar] [CrossRef]
- Halbach, K. Design of permanent multipole magnets with oriented rare earth cobalt material. Nucl. Instrum. Methods 1980, 169, 1–10. [Google Scholar] [CrossRef]
- Halbach, K. Strong rare earth cobalt quadrupoles. IEEE Trans. Nucl. Sci. 1979, 26, 3882–3884. [Google Scholar] [CrossRef]
- Yao, P.; Li, D. The magnetic field analysis and optimization of permanent magnetic adhesion device for a novel wall-climbing robot. In Proceedings of the International Technology and Innovation Conference 2009 (ITIC 2009), Xi’an, China, 12–14 October 2009. [Google Scholar]
- Guo, D.; Chen, Y. Optimization Design and Analysis of an Adaptive Variable Magnetic Adsorption Climbing Robot. In Proceedings of the 5th IFToMM International Conference on Mechanisms, Transmissions and Applications, School of Mechanical Engineering of Dalian University of Technology, Dalian, China, 9–11 October 2019. [Google Scholar]
- Hussain, S.; Sattar, T.; Salinas, E. Parameter analysis and design framework for magnetic adhesion wall-climbing wheeled robot. Int. J. Intell. Syst. Technol. Appl. 2012, 11, 102–116. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | BH(max) | |||
|---|---|---|---|---|
| NdFeB-N35 | T | ≥859 KA/m | ≥955 KA/m | KJ/m |
| Air Gap [mm] | Opposite | Sinusoidal | PMAD | Halbach |
|---|---|---|---|---|
| 9 | 7.1968 | 19.5127 | 0.0060 | 0.5160 |
| 8 | 5.8543 | 20.6233 | 0.0364 | 0.4746 |
| 7 | 4.7136 | 21.6529 | 0.0637 | 0.4332 |
| 6 | 3.7550 | 22.6780 | 0.0863 | 0.3927 |
| 5 | 2.9481 | 23.6378 | 0.1034 | 0.3507 |
| 4 | 2.2676 | 24.4055 | 0.1157 | 0.3084 |
| 3 | 1.6860 | 24.8974 | 0.1233 | 0.2631 |
| 2 | 1.1779 | 24.8933 | 0.1179 | 0.2103 |
| 1 | 0.6931 | 23.7222 | 0.0865 | 0.1328 |
| State | Opposite | Sinusoidal | Halbach | PMAD | Proposed |
|---|---|---|---|---|---|
| A | 214.02 N | 133.29 N | 1191.96 N | 1300.20 N | 1551.24 N |
| B | 378.63 N | 167.19 N | 1698.33 N | 1644.69 N | 2069.70 N |
| C | 284.01 N | 148.89 N | 1420.56 N | 1460.31 N | 1788.87 N |
| D | 162.00 N | 119.88 N | 1003.11 N | 1160.52 N | 1348.80 N |
| Air Gap [mm] | Opposite | Sinusoidal | PMAD | Halbach |
|---|---|---|---|---|
| 9 | 0.4694 | 0.7627 | 0.0048 | 0.2729 |
| 8 | 0.5341 | 0.9125 | 0.0336 | 0.3079 |
| 7 | 0.6069 | 1.0955 | 0.0687 | 0.3464 |
| 6 | 0.6880 | 1.3206 | 0.1095 | 0.3888 |
| 5 | 0.7774 | 1.5993 | 0.1562 | 0.4328 |
| 4 | 0.8742 | 1.9466 | 0.2102 | 0.4777 |
| 3 | 0.9756 | 2.3835 | 0.2721 | 0.5164 |
| 2 | 1.0737 | 2.9388 | 0.3224 | 0.5311 |
| 1 | 1.1482 | 3.6595 | 0.3036 | 0.4470 |
| Mean() | 0.7942 | 1.8466 | 0.1646 | 0.4134 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Guan, E.; Li, P.; Zhao, Y. A Novel Magnetic Circuit Design Method for a Permanent Magnetic Chuck of a Wall-Climbing Robot. Energies 2022, 15, 6653. https://doi.org/10.3390/en15186653
Zhang Y, Guan E, Li P, Zhao Y. A Novel Magnetic Circuit Design Method for a Permanent Magnetic Chuck of a Wall-Climbing Robot. Energies. 2022; 15(18):6653. https://doi.org/10.3390/en15186653
Chicago/Turabian StyleZhang, Yulong, Enguang Guan, Peixing Li, and Yanzheng Zhao. 2022. "A Novel Magnetic Circuit Design Method for a Permanent Magnetic Chuck of a Wall-Climbing Robot" Energies 15, no. 18: 6653. https://doi.org/10.3390/en15186653
APA StyleZhang, Y., Guan, E., Li, P., & Zhao, Y. (2022). A Novel Magnetic Circuit Design Method for a Permanent Magnetic Chuck of a Wall-Climbing Robot. Energies, 15(18), 6653. https://doi.org/10.3390/en15186653