

A Multiple Time Scales Rolling Coordinative Dispatching Method for an Island Microgrid with High Proportion Tidal Current Energy Access and Demand Response Resources


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
- The architecture and implementation procedure of rolling coordinative dispatching considering the multi-temporal characteristics of island demand response resources are described. In the long timescale, ship load realizes traffic and energy interaction, whereas in the short time scale, dispatchable load contributes to the supply-demand balance;
- (2)
- A multiple time scales day-ahead-intraday-real-time rolling coordinative dispatching model is established, considering economic optimization, minimum carbon emission, and minimum power fluctuation of an island microgrid;
- (3)
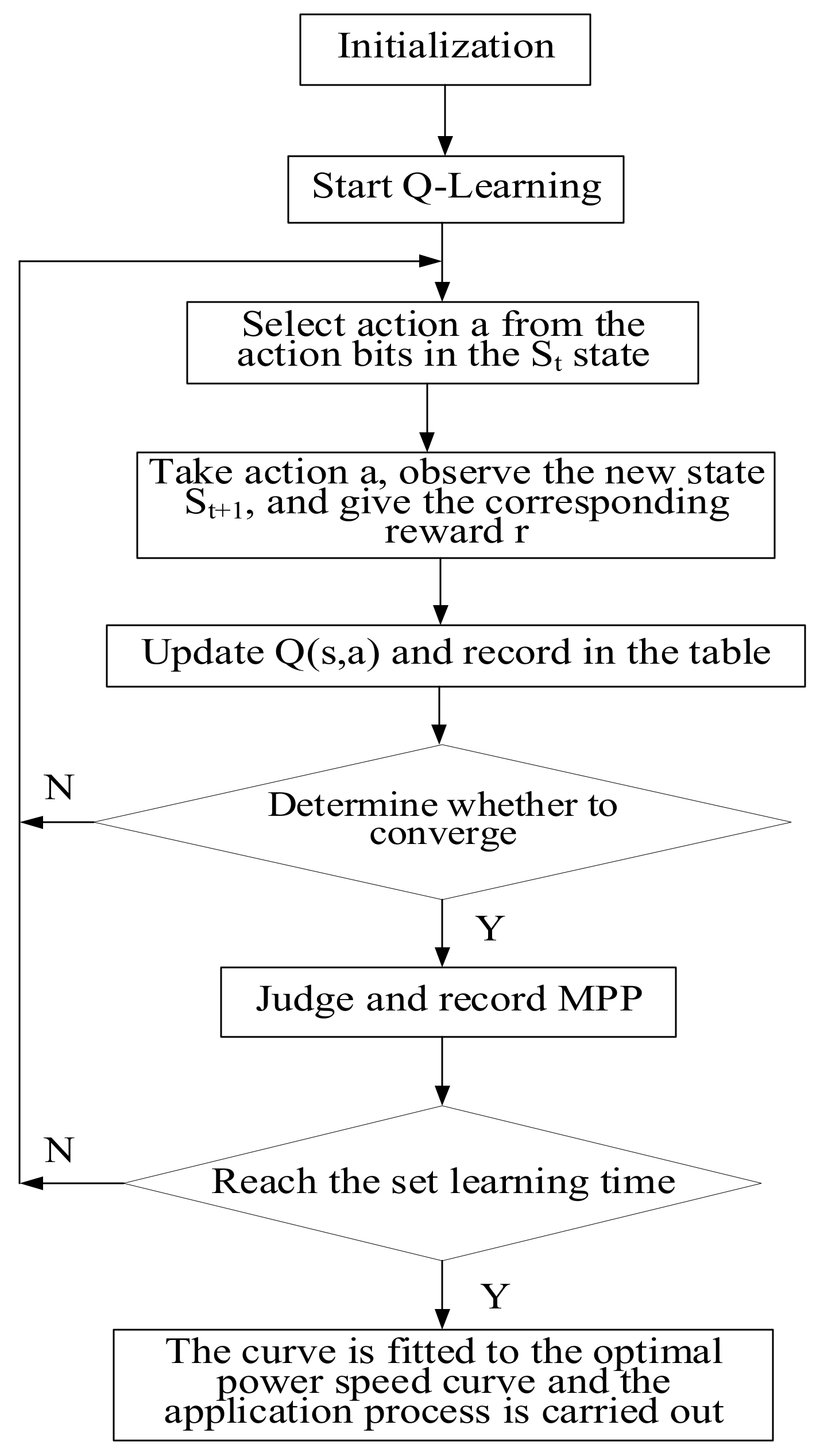
- In order to facilitate the multiple time scales coordinative dispatching and execution aimed at the maximum power tracking problem of the power flow power generation unit, a Q-Learning algorithm-based MPPT intelligent control approach for real-time maximum power tracking of tidal current energy generation is presented;
- (4)
- The advancement and efficacy of the dispatching approach are validated using examples.
2. Island Microgrid
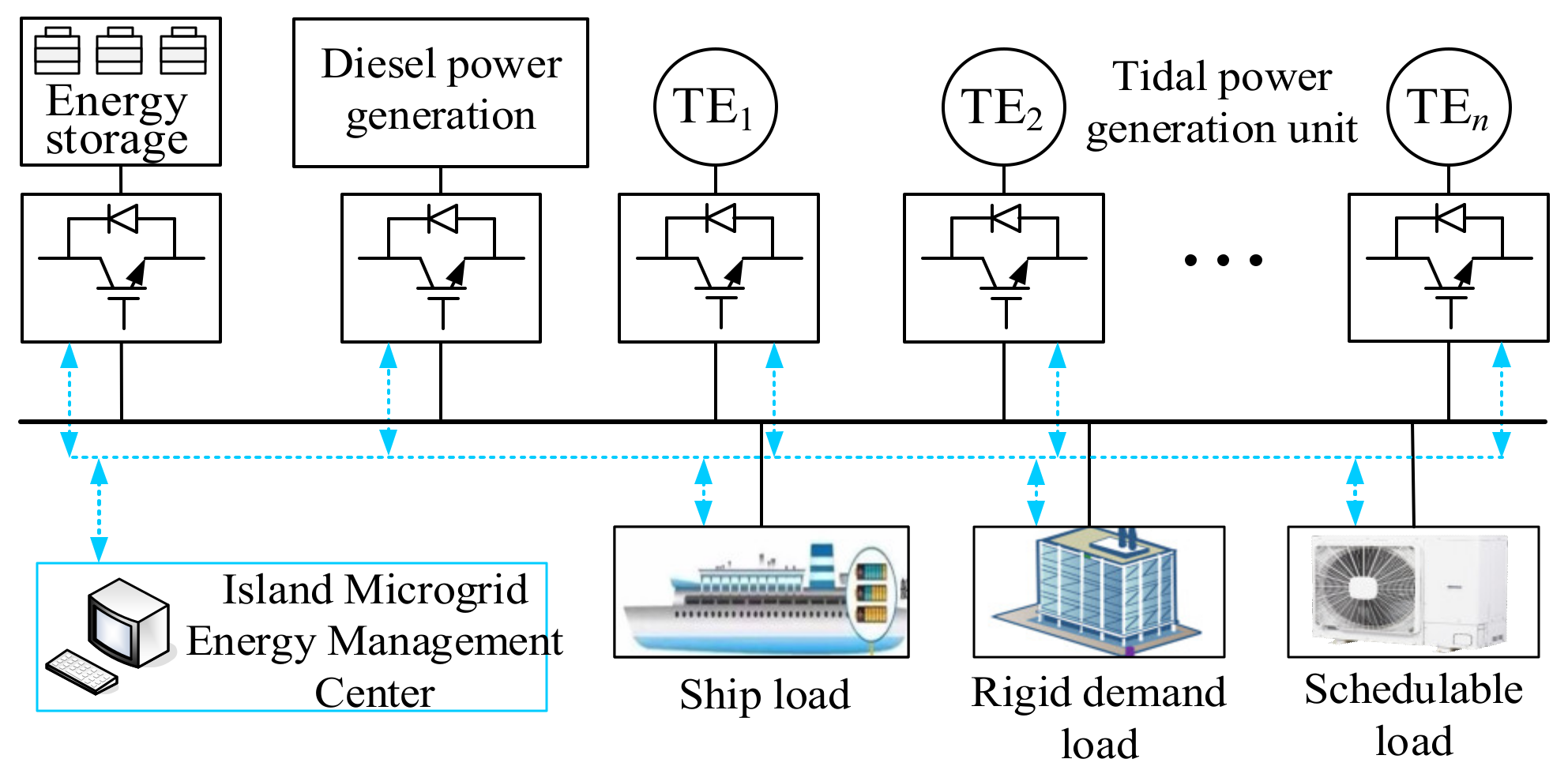
2.1. Island Microgrid Structure
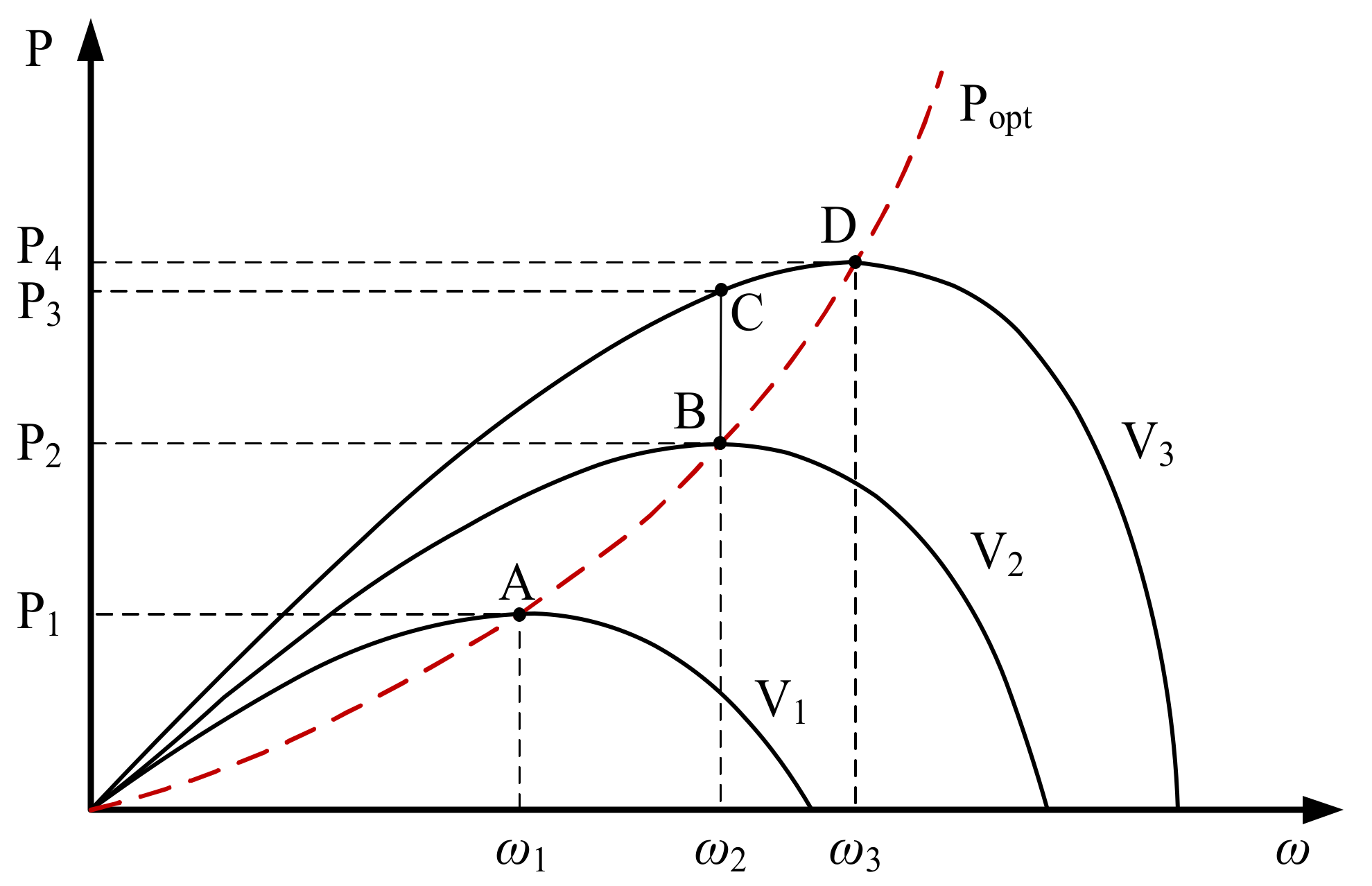
2.2. Maximum Power Tracking of Power Flow Power Generation
- (1)
- State space
- (2)
- Action space
- (3)
- Rewards
3. Multiple Time Scales Rolling Coordinative Dispatching Method
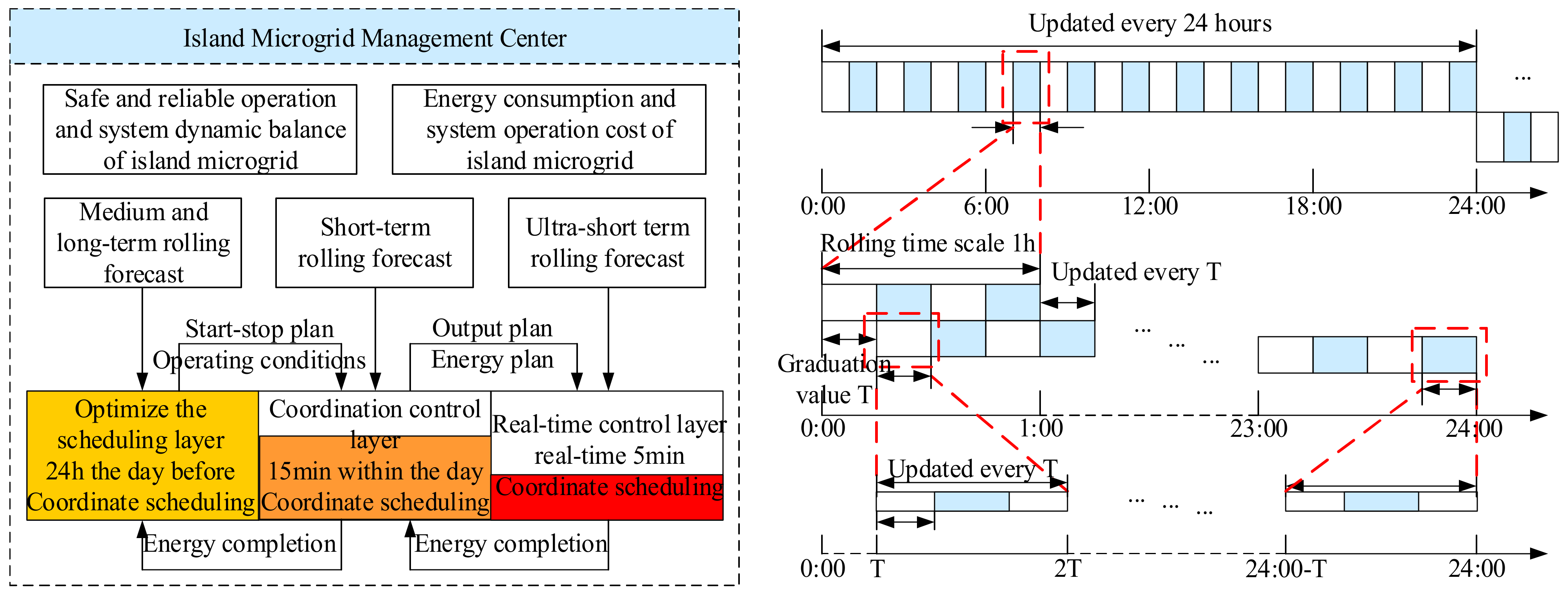
3.1. Basic Architecture of Multiple Time Scales Rolling Coordinative Dispatching
- (1)
- Day-ahead dispatch plan: according to the medium and long-term forecast data of tidal current energy generation, load power, etc., considering the tidal current energy consumption of the island microgrid and the total carbon of the system emissions, we get the 24-h day-ahead operation plan of each equipment, and arrange the start-stop plan and dispatchable load operation conditions;
- (2)
- Intraday dispatch plan: take 15 min as a period and 1 h as a cycle (4 periods in total), on the basis of the previous dispatch plan and the short-term forecast data of tidal current energy generation, load power, etc., we modify the output of equipment and dispatchable load every 15 min;
- (3)
- Real-time dispatch plan: take 5 min as a period and 15 min as a cycle (3 periods in total), change the equipment output and dispatchable load based on the ultra-short-term forecast data of tidal current energy generation, load power, etc.
3.2. Multiple Time Scales Rolling Coordinative Dispatching Implementation Process
- (1)
- Time dimension: It is important to accommodate variances in the prediction error of the island source and load over multiple time scales, the scope of adjustment resources, and their associated costs;
- (2)
- Object dimension: When engaging in the dispatching operation of island microgrid, it is required to accommodate demand response projects of diverse natures and loads with varying characteristics.
3.3. Multiple Time Scales Rolling Coordinative Dispatching Model
3.3.1. Day-Ahead Dispatching Model
- (1)
- Objective function
- (2)
- Constraints
- 1.
- Constraints of tidal current energy generation unitThe output power of the tidal current energy generation unit should meet:where and are the minimum and maximum output power of the tidal current energy generation unit, respectively.
- 2.
- Diesel generator unit constraintsThe output power of the diesel generator unit should meet:where and are the minimum and maximum output power of the diesel generating unit, respectively.
- 3.
- Energy storage unit constraints
3.3.2. Intraday Dispatching Model
- (1)
- Objective function
- (2)
- Constraints
- 1.
- Demand response resource constraintsThe schedulable power of a demand response resource should satisfy:where and are the minimum and maximum schedulable load powers of the demand response resources, respectively.
- 2.
- Carbon emission constraint equationThe carbon emissions of all load distributions in the island microgrid are equal to the carbon emissions generated by the diesel generating units.where is the carbon emission factor of the just-demanded load; is the carbon emission factor of the dispatchable load.
3.3.3. Real-Time Dispatching Model
- (1)
- Objective function
- (2)
- Constraints
4. Results and Discussions
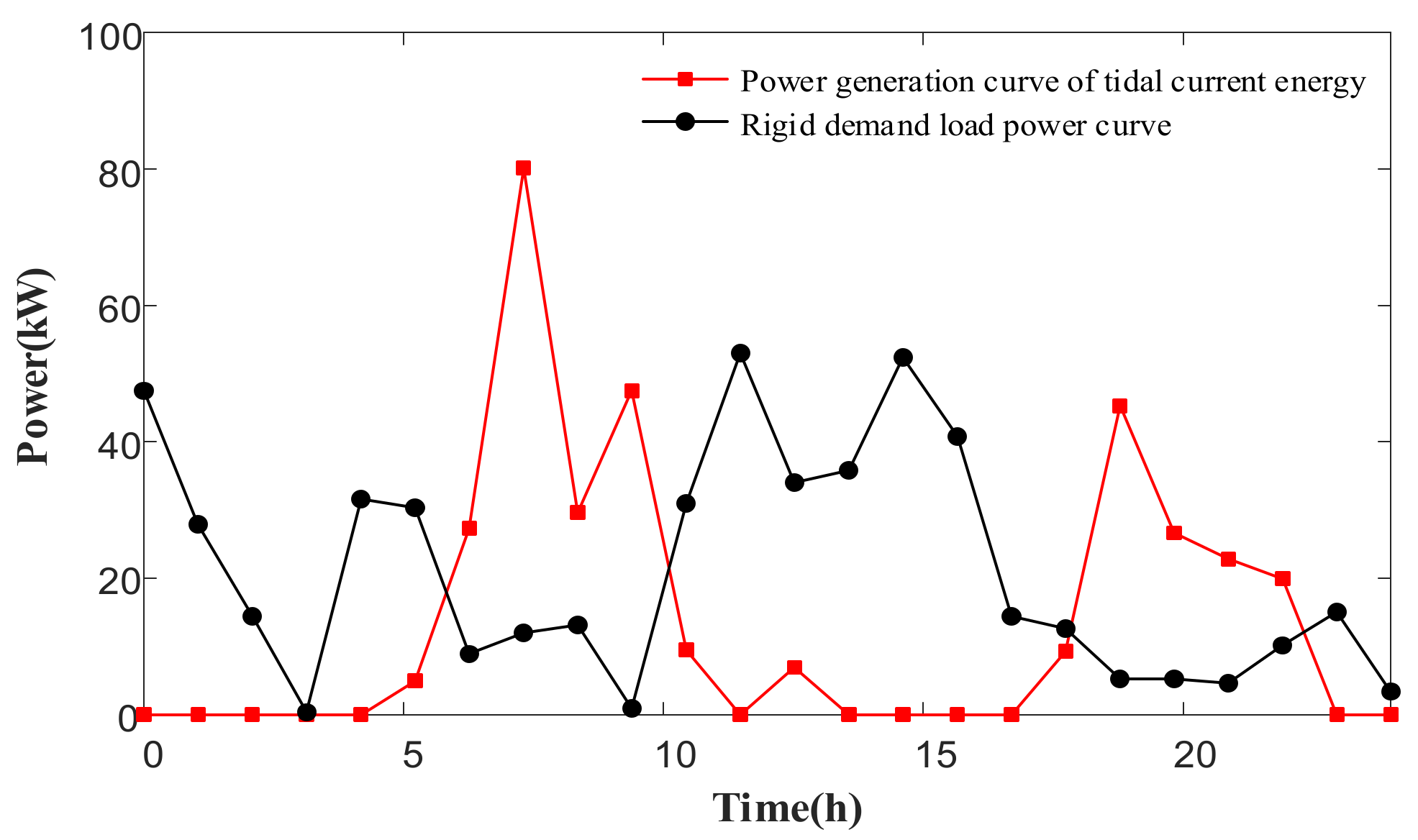
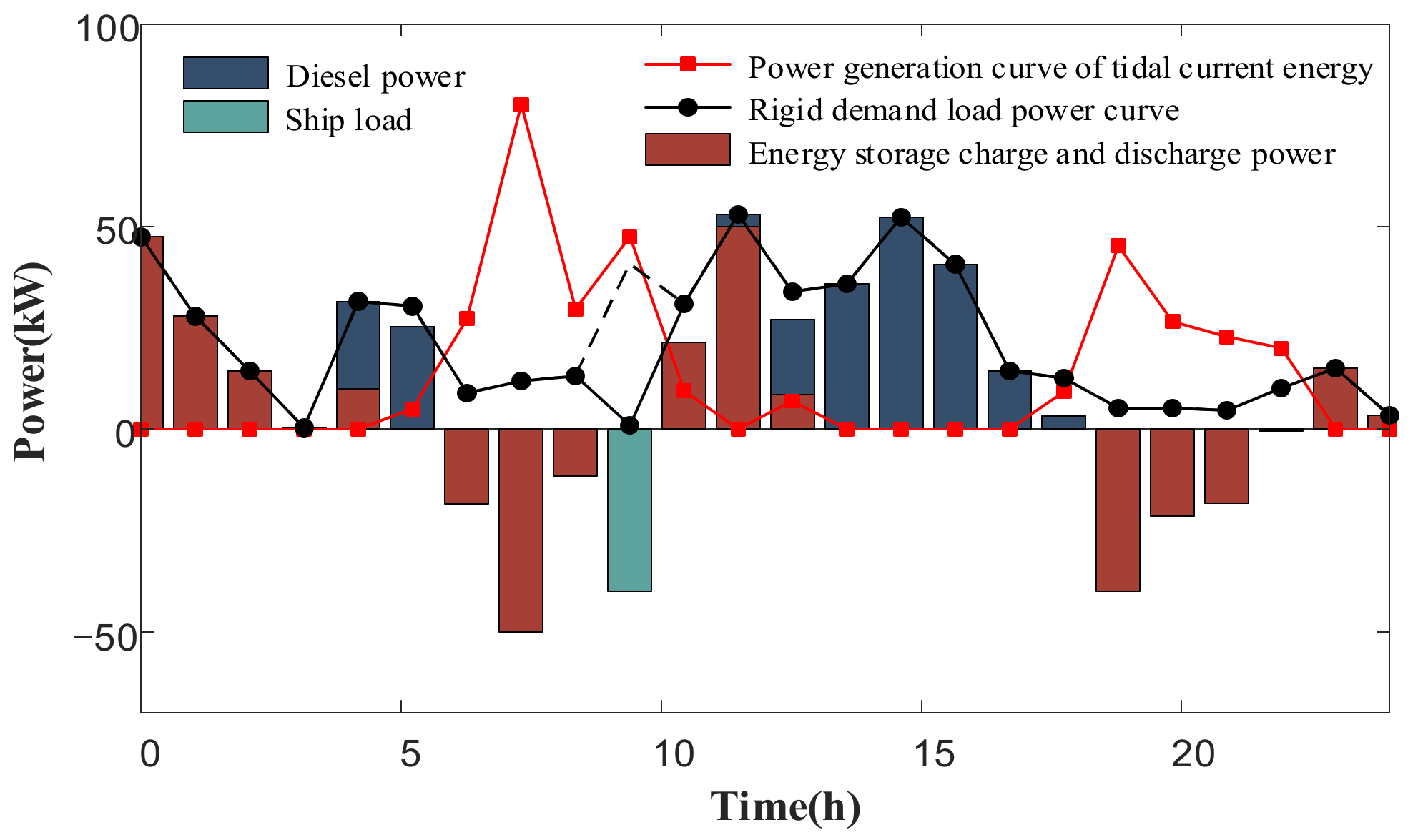
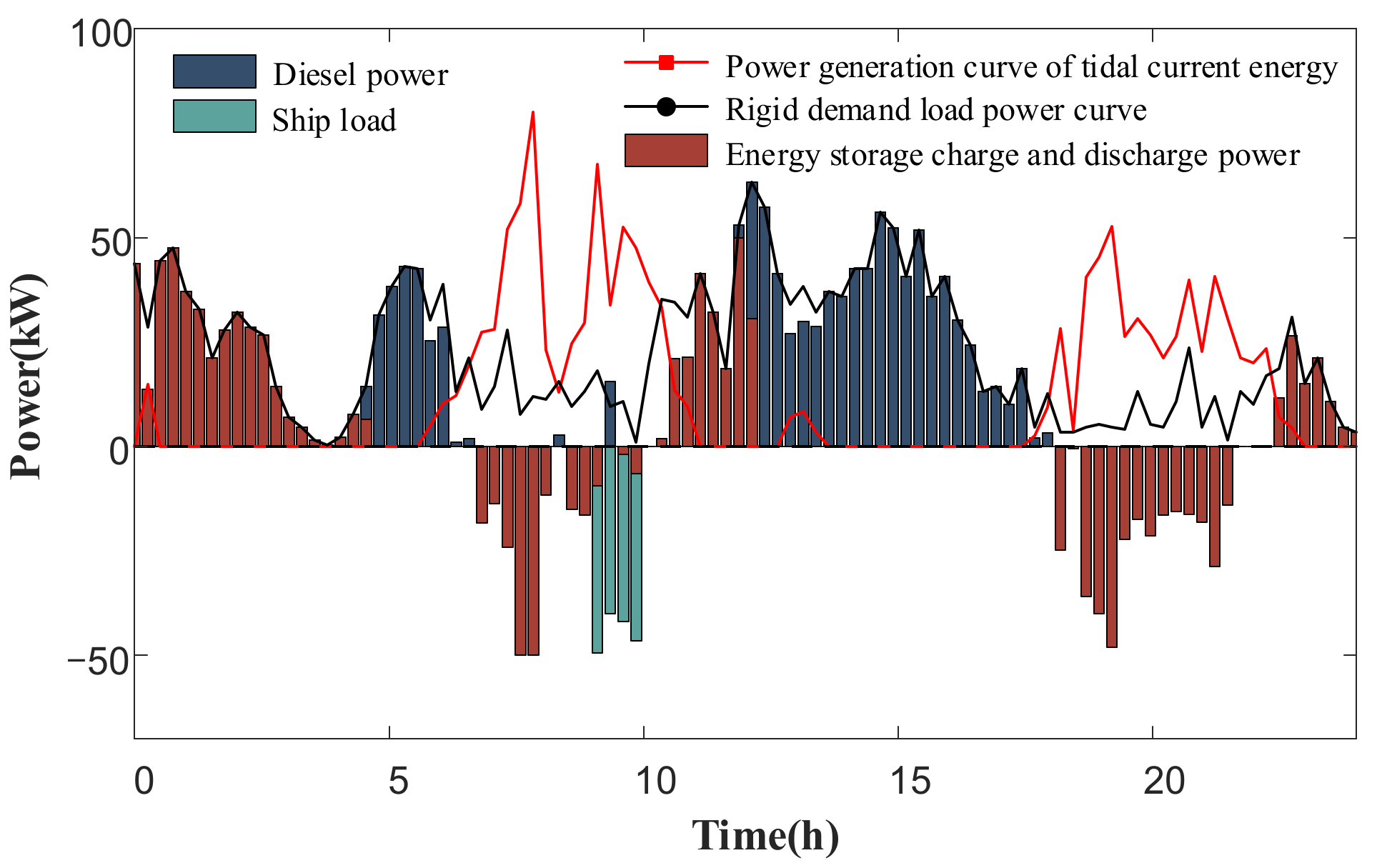
4.1. Day-Ahead Dispatching Result Analysis
4.2. Analysis of Intraday Dispatching Results
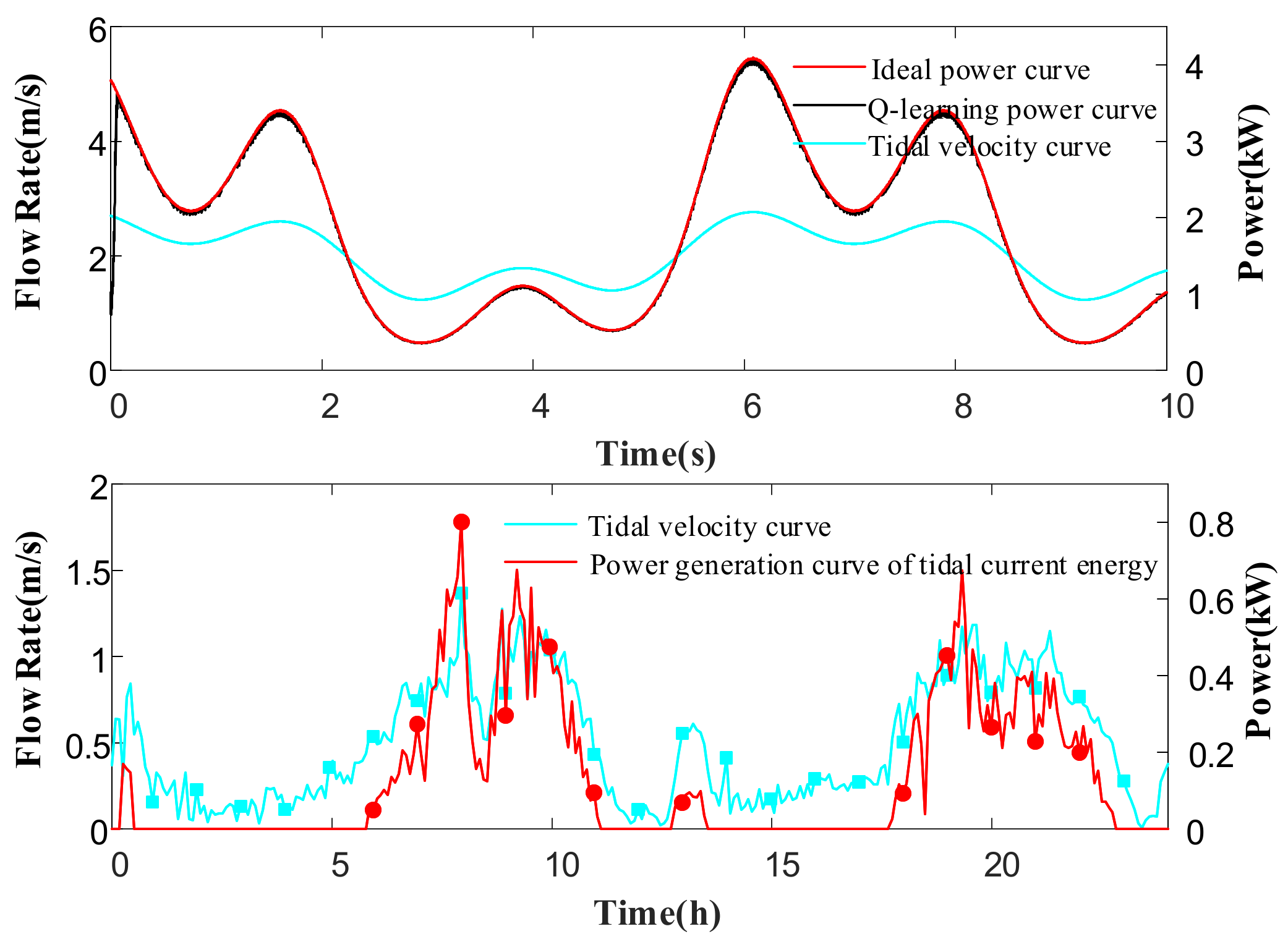
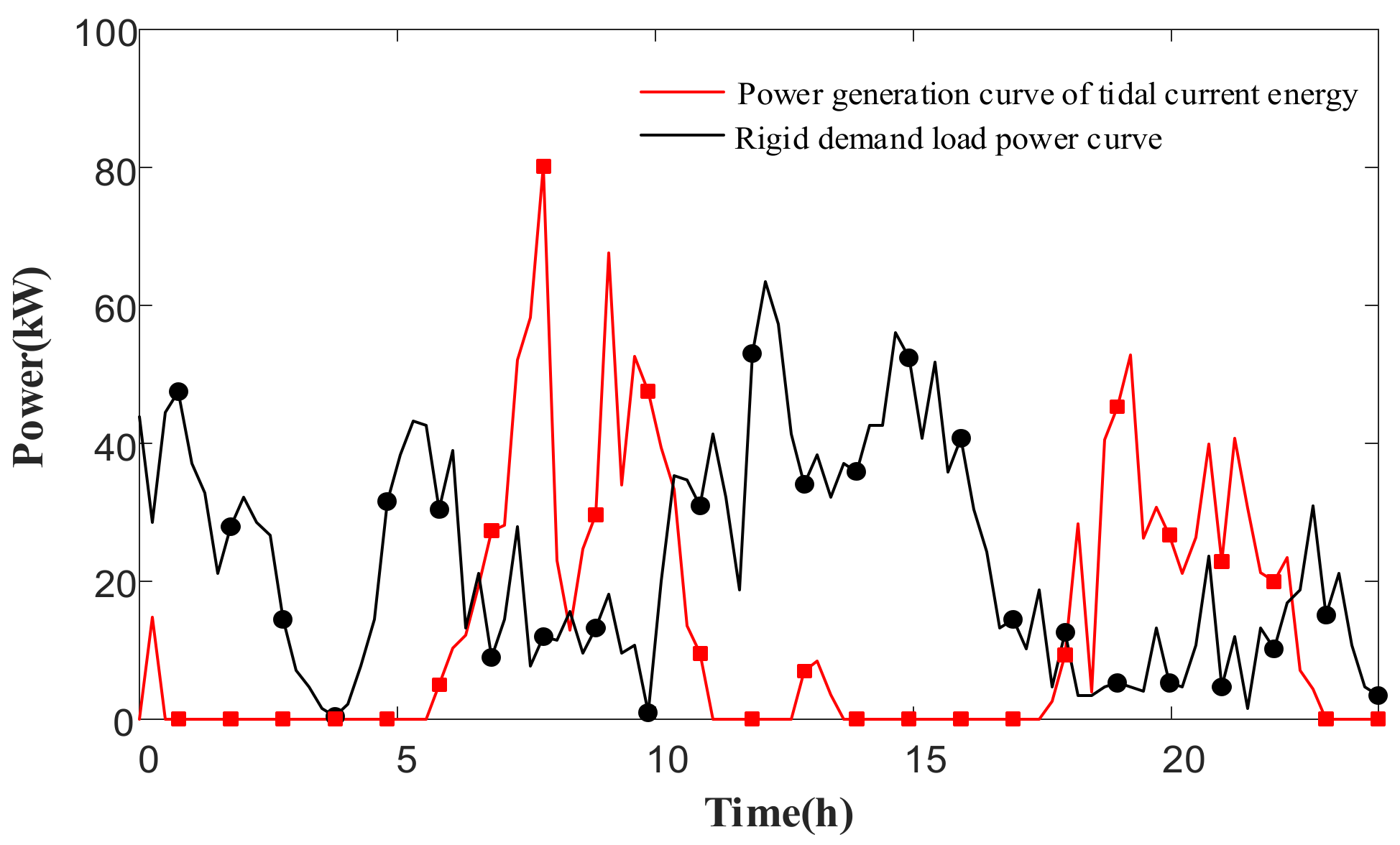
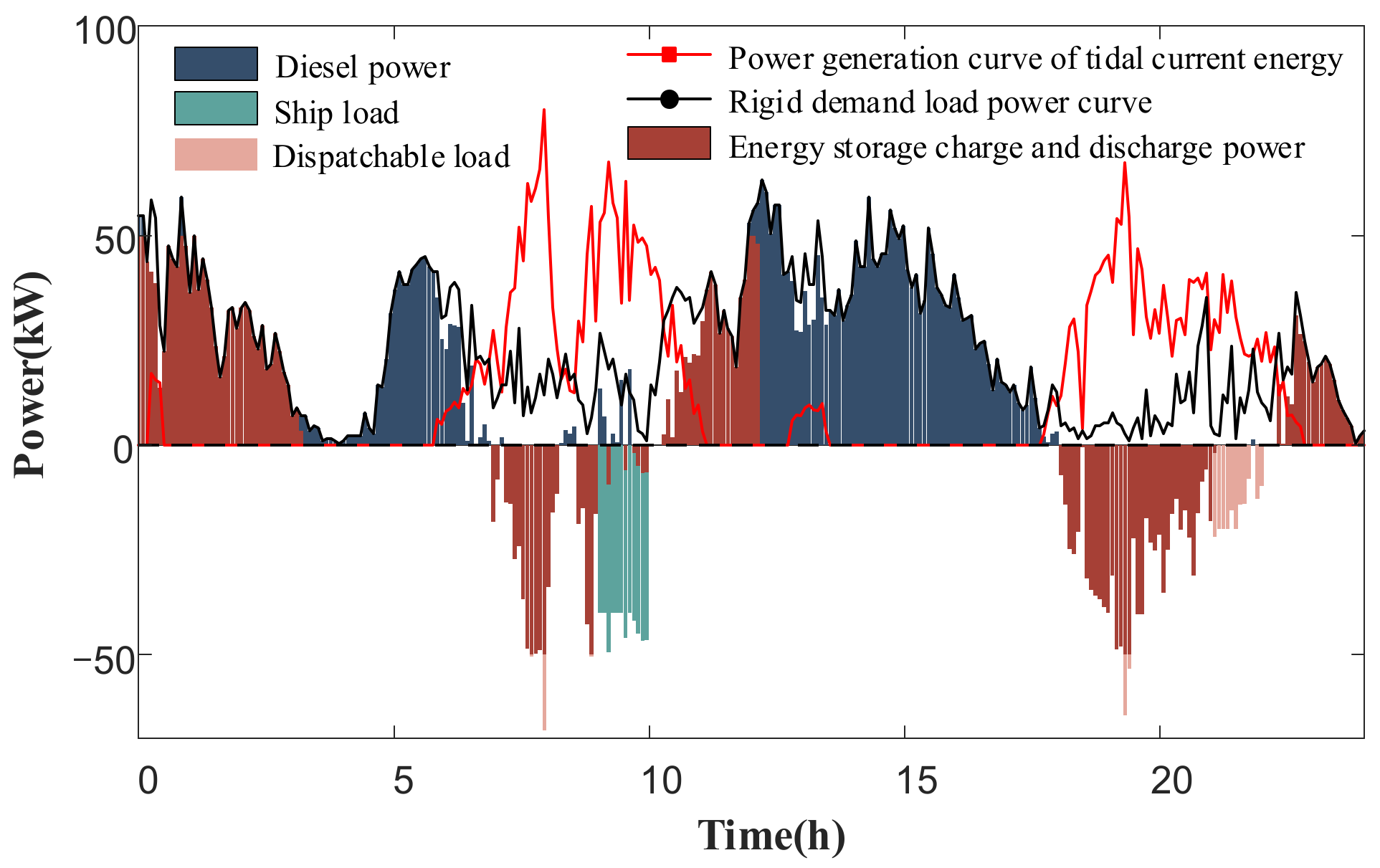
4.3. Analysis of Real-Time Dispatching Results
5. Conclusions and Prospects
- (1)
- The interplay between ship traffic and energy on long time scales and the balance between supply and demand on short time scales can be achieved by considering the multiple time scales characteristics of island demand response resources;
- (2)
- Participating in the coordinative dispatching of an island microgrid via demand response resources will increase the system’s dynamic power balance capability and its capacity to absorb renewable energy, as well as lessen the operating pressure of diesel power generation and energy storage;
- (3)
- The MPPT intelligent control method of power flow energy generation based on the Q-Learning algorithm can keep the power flow energy utilization at the maximum value and ensure the maximum power of the power flow energy captured. It is convenient for the next multi-time scale coordination scheduling to be executed more efficiently;
- (4)
- The multiple time scales day-ahead, intraday, and real-time rolling coordinative dispatching method of an island microgrid can make full use of tidal current energy and reduce the use of island diesel power generation, which is of critical importance to the sustainable development of an island;
Author Contributions
Funding
Conflicts of Interest
References
- Ermakov, A.; Marie, A.; Ringwood, J.V. Some Fundamental Results for Cyclorotor Wave Energy Converters for Optimum Power Capture. IEEE Trans. Sustain. Energy 2022, 13, 1869–1872. [Google Scholar] [CrossRef]
- Rasool, S.; Muttaqi, K.M.; Sutanto, D. A Multi-Filter Based Dynamic Power Sharing Control for a Hybrid Energy Storage System Integrated to a Wave Energy Converter for Output Power Smoothing. IEEE Trans. Sustain. Energy 2022, 13, 1693–1706. [Google Scholar] [CrossRef]
- Lu, Q.; Shi, H. Progress and Future Trend of Ware Energy Technology in China. Coast. Eng. 2022, 41, 1–12. [Google Scholar]
- Kai, L.Y.; Sarip, S.; Kaidi, H.M.; Ardila-Rey, J.A.; Samsuddin, N.M.; Muhtazaruddin, M.N.; Muhammad-Sukki, F.; Aziz, S.A. Current Status and Possible Future Applications of Marine Current Energy Devices in Malaysia: A Review. IEEE Access 2021, 9, 86869–86888. [Google Scholar] [CrossRef]
- Zhang, Z.; Kang, C. Challenges and Prospects for Constructing the New-type Power System Towards a Carbon Neutrality Future. Proc. CSEE 2022, 42, 2806–2819. [Google Scholar]
- Zhuo, Z.; Du, E.; Zhang, N.; Nielsen, C.P.; Lu, X.; Xiao, J.; Wu, J.; Kang, C. Cost increase in the electricity supply to achieve carbon neutrality in China. Nat. Commun. 2022, 13, 3172. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, G. Non-Causal Linear Optimal Control of Wave Energy Converters With Enhanced Robustness by Sliding Mode Control. IEEE Trans. Sustain. Energy 2020, 11, 2201–2209. [Google Scholar] [CrossRef]
- Haider, A.S.; Brekken, T.K.A.; Coe, R.G.; Bacelli, G.; McCall, A. On Real-Time Hybrid Testing of Ocean Wave Energy Conversion Systems: An Experimental Study. IEEE Open J. Ind. Appl. 2022, 3, 30–40. [Google Scholar] [CrossRef]
- Meng, F.; Ding, B.; Sergiienko, N.Y.; Chen, H.; Xu, H.; Li, Y. Power Set-Point Tracking of a Wave Energy Converter With Multiple Power Take-Off Units in Irregular Waves. IEEE Trans. Sustain. Energy 2022, 13, 767–777. [Google Scholar] [CrossRef]
- Song, M.; Sun, W.; Shahidehpour, M.; Yan, M.; Gao, C. Multi-Time Scale Coordinated Control and Scheduling of Inverter-Based TCLs With Variable Wind Generation. IEEE Trans. Sustain. Energy 2021, 12, 46–57. [Google Scholar] [CrossRef]
- Xu, J.; Liao, S.; Jiang, H.; Zhang, D.; Sun, Y.; Ke, D.; Li, X.; Yang, J.; Peng, X.; Yao, L. A multi-time scale tie-line energy and reserve allocation model considering wind power uncertainties for multi-area systems. CSEE J. Power Energy Syst. 2021, 7, 677–687. [Google Scholar] [CrossRef]
- Yi, Z.; Xu, Y.; Gu, W.; Wu, W. A Multi-Time-Scale Economic Scheduling Strategy for Virtual Power Plant Based on Deferrable Loads Aggregation and Disaggregation. IEEE Trans. Sustain. Energy 2020, 11, 1332–1346. [Google Scholar] [CrossRef]
- Hu, J.; Zhou, H.; Li, Y.; Hou, P.; Yang, G. Multi-time Scale Energy Management Strategy of Aggregator Characterized by Photovoltaic Generation and Electric Vehicles. J. Mod. Power Syst. Clean Energy 2020, 8, 727–736. [Google Scholar] [CrossRef]
- Xing, X.; Xie, L.; Meng, H.; Guo, X.; Yue, L.; Guerrero, J.M. Energy management strategy considering multi-time-scale operational modes of batteries for the grid-connected microgrids community. CSEE J. Power Energy Syst. 2020, 6, 111–121. [Google Scholar] [CrossRef]
- Liu, J.; Huang, X.; Li, Z. Multi-time Scale Optimal Power Flow Strategy for Medium-voltage DC Power Grid Considering Different Operation Modes. J. Mod. Power Syst. Clean Energy 2020, 8, 46–54. [Google Scholar] [CrossRef]
- Wang, L.; Zhou, J.; Zhu, L.; Wang, X.; Yin, C.; Cong, H. Multi-time-scale Optimization Scheduling of Integrated Energy System Based on Distributed Model Predictive Control. Autom. Electr. Power Syst. 2021, 45, 57–65. [Google Scholar]
- Zhang, J.; Qin, D.; Ye, Y.; He, Y.; Fu, X.; Yang, J.; Shi, G.; Zhang, H. Multi-Time Scale Economic Scheduling Method Based on Day-Ahead Robust Optimization and Intraday MPC Rolling Optimization for Microgrid. IEEE Access 2021, 9, 140315–140324. [Google Scholar] [CrossRef]
- Masrur, H.; Gamil, M.M.; Islam, M.R.; Muttaqi, K.M.; Lipu, M.S.H.; Senjyu, T. An Optimized and Outage-Resilient Energy Management Framework for Multicarrier Energy Microgrids Integrating Demand Response. IEEE Trans. Ind. Appl. 2022, 58, 4171–4180. [Google Scholar] [CrossRef]
- Huang, C.; Zhang, H.; Song, Y.; Wang, L.; Ahmad, T.; Luo, X. Demand Response for Industrial Micro-Grid Considering Photovoltaic Power Uncertainty and Battery Operational Cost. IEEE Trans. Smart Grid 2021, 12, 3043–3055. [Google Scholar] [CrossRef]
- Waseem, M.; Lin, Z.; Ding, Y.; Wen, F.; Liu, S.; Palu, I. Technologies and Practical Implementations of Air-conditioner Based Demand Response. J. Mod. Power Syst. Clean Energy 2021, 9, 1395–1413. [Google Scholar] [CrossRef]
- Algarni, A.S.; Suryanarayanan, S.; Siegel, H.J.; Maciejewski, A.A. Combined Impact of Demand Response Aggregators and Carbon Taxation on Emissions Reduction in Electric Power Systems. IEEE Trans. Smart Grid 2021, 12, 1825–1827. [Google Scholar] [CrossRef]
- Gao, J.; Ma, Z.; Yang, Y.; Gao, F.; Guo, G.; Lang, Y. The Impact of Customers’ Demand Response Behaviors on Power System With Renewable Energy Sources. IEEE Trans. Sustain. Energy 2020, 11, 2581–2592. [Google Scholar] [CrossRef]
- Zhang, Z.; Huang, Y.; Chen, H.; Huang, Q.; Lee, W.-J. A Novel Hierarchical Demand Response Strategy for Residential Microgrid. IEEE Trans. Ind. Appl. 2021, 57, 3262–3271. [Google Scholar] [CrossRef]












Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ouyang, Y.; Zhao, W.; Wang, H.; Wang, W. A Multiple Time Scales Rolling Coordinative Dispatching Method for an Island Microgrid with High Proportion Tidal Current Energy Access and Demand Response Resources. Energies 2022, 15, 7292. https://doi.org/10.3390/en15197292
Ouyang Y, Zhao W, Wang H, Wang W. A Multiple Time Scales Rolling Coordinative Dispatching Method for an Island Microgrid with High Proportion Tidal Current Energy Access and Demand Response Resources. Energies. 2022; 15(19):7292. https://doi.org/10.3390/en15197292
Chicago/Turabian StyleOuyang, Yani, Wei Zhao, Haifeng Wang, and Wenyong Wang. 2022. "A Multiple Time Scales Rolling Coordinative Dispatching Method for an Island Microgrid with High Proportion Tidal Current Energy Access and Demand Response Resources" Energies 15, no. 19: 7292. https://doi.org/10.3390/en15197292
APA StyleOuyang, Y., Zhao, W., Wang, H., & Wang, W. (2022). A Multiple Time Scales Rolling Coordinative Dispatching Method for an Island Microgrid with High Proportion Tidal Current Energy Access and Demand Response Resources. Energies, 15(19), 7292. https://doi.org/10.3390/en15197292