
Modeling and Finite-Horizon MPC for a Boiler-Turbine System Using Minimal Realization State-Space Model



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
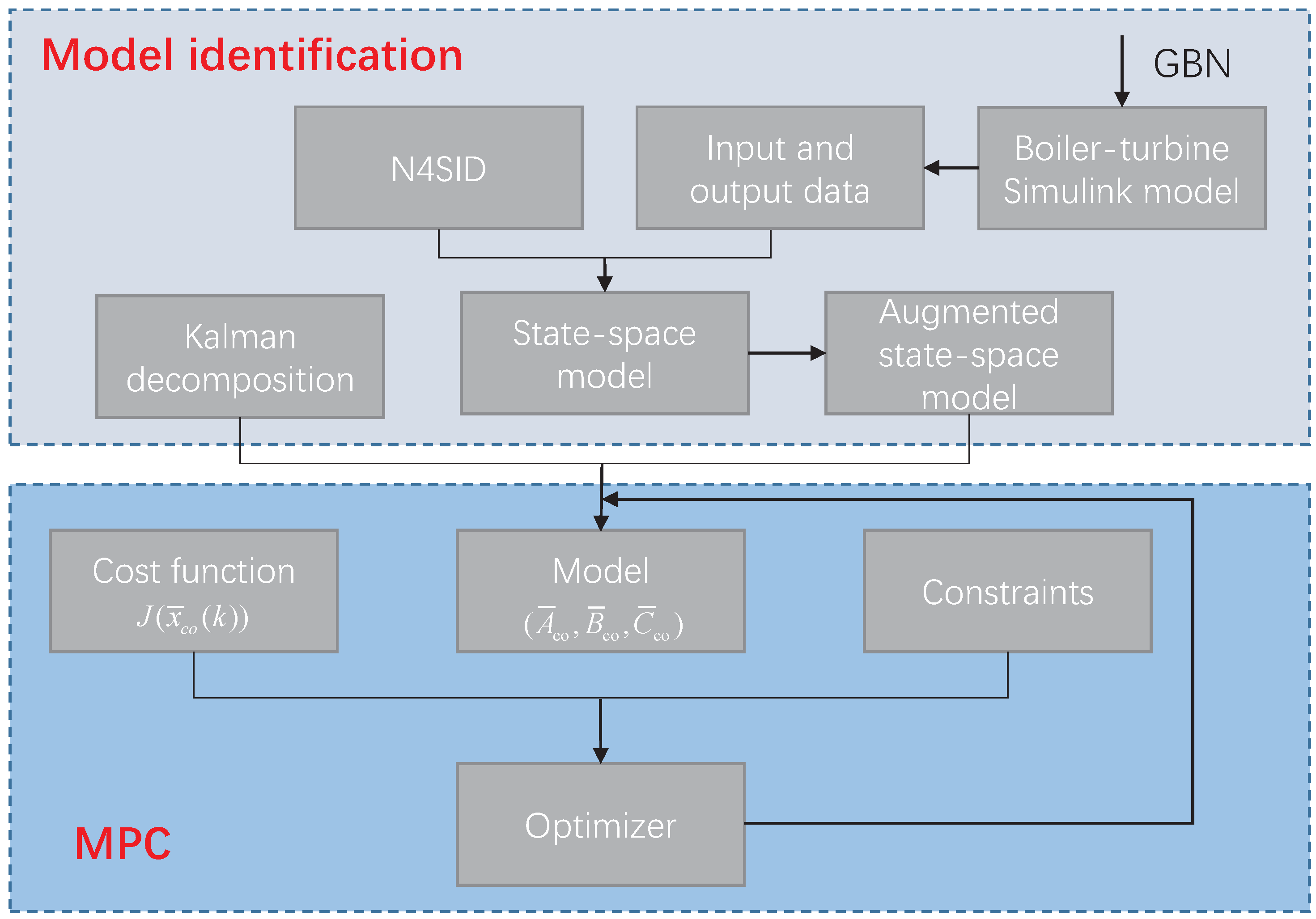
- The numerical algorithm for subspace state-space identification (N4SID) is utilized for a drum-type boiler-turbine system to obtain a linearized state-space model. By taking the inputs and outputs of the state-space model from the subspace identification method as system states, an augmented NMSS model with state measurable is constructed to avoid a state observer;
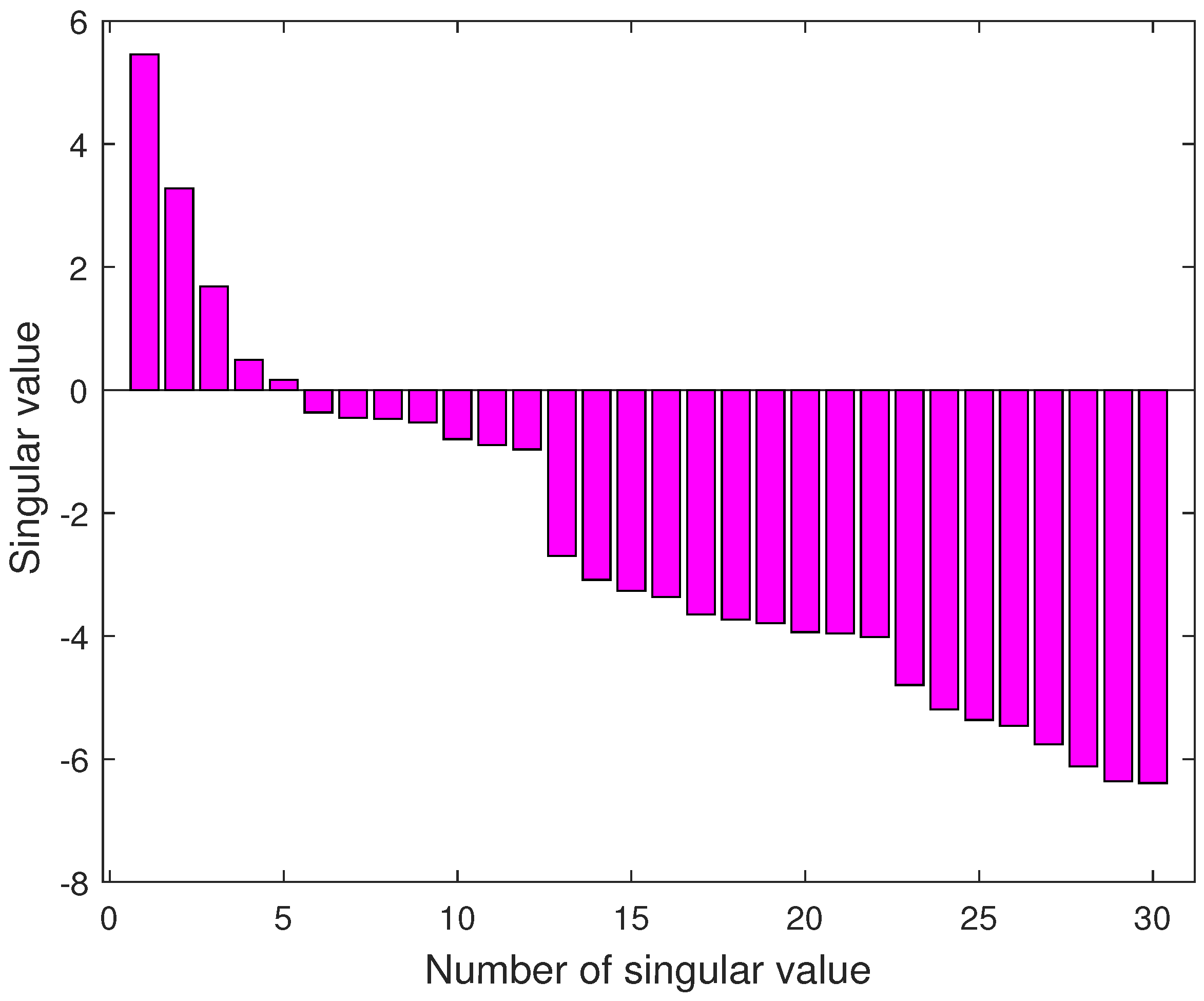
- The augmented NMSS model is transformed into a canonical formulation by adopting a Kalman decomposition in order to reduce the computation burden of controller parameter optimization;
- Based on the minimal realization state-space model, an MPC controller is transformed into solving a finite-horizon optimization problem, where the cost function is composed by a finite horizon cost and terminal cost. The nominal stability of finite-horizon MPC are also guaranteed for the resulting model.
2. The Overview for Drum-Type Boiler-Turbine
2.1. Description of the Process
2.2. Boiler-Turbine Non-Linear Dynamic Model
3. Model Identification Design
3.1. Identification Test Signal
3.2. Identification and Modeling Performance
3.3. Minimal Realization NMSS Model
- States which are both controllable and observable;
- States which are controllable and unobservable;
- States which are observable and uncontrollable;
- States which are uncontrollable and unobservable.
3.4. Control Objectives
4. Finite-Horizon MPC Formulation
4.1. Performance Function and Terminal Control Law Design
4.2. Overall Optimization Problem and Stability Analysis
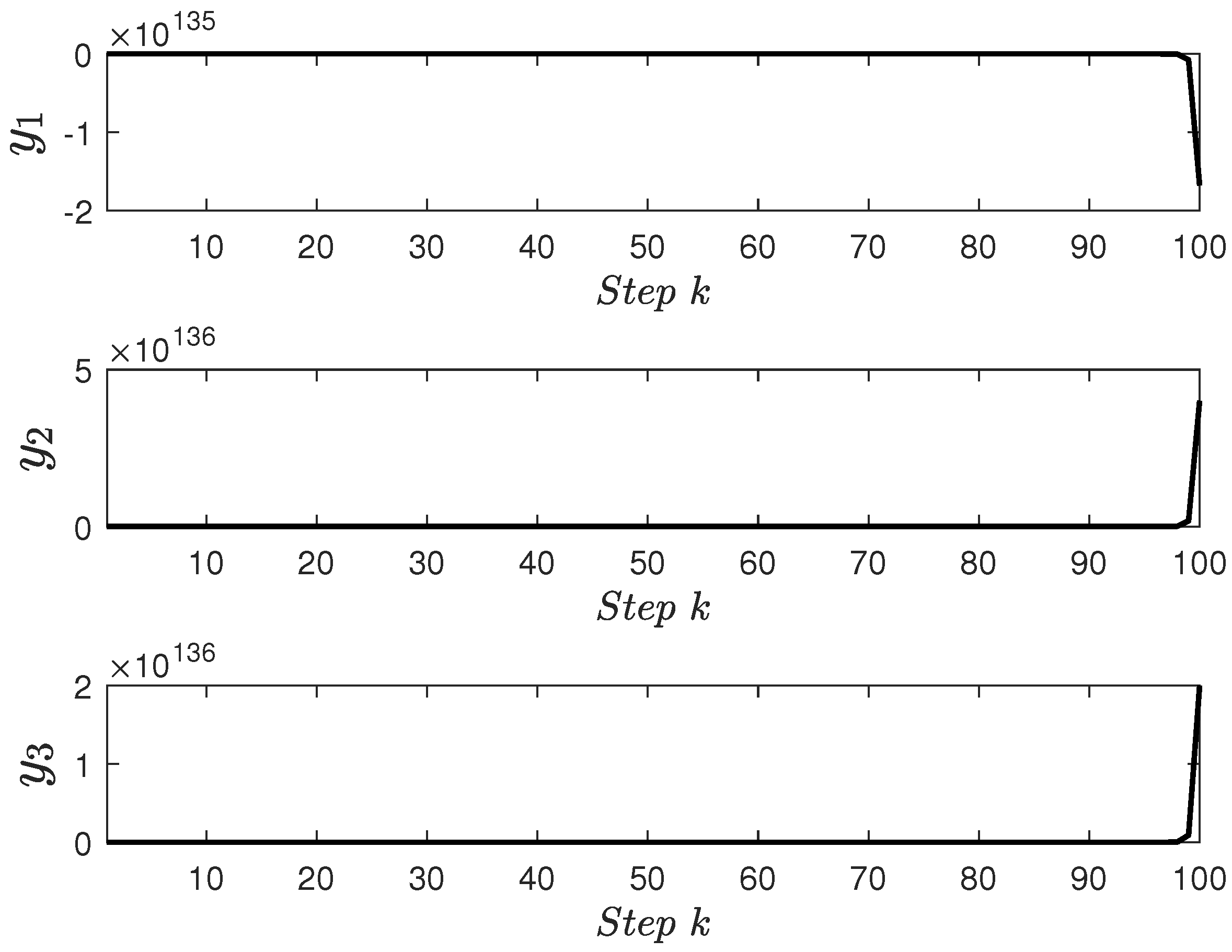
5. Simulation Results and Analysis
5.1. Simulation Settings
5.2. Simulation Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| MPC | model predictive control |
| NMSS | non-minimal state-space |
| ARX | autoregressive exogenous |
| N4SID | numerical algorithm for subspace state-space identification |
| GBN | generalized binary noise |
| SVD | singular value decomposition |
| CVs | controlled variables |
| LQR | linear quadratic regulator |
| LMIs | linear matrix inequalities |
| drum steam pressure () | |
| electric power () | |
| fluid density () | |
| fuel flow valve position | |
| steam control valve position | |
| feed-water valve position | |
| drum water level | |
| steam quality | |
| evaporation rate () | |
| steady-state working (equilibrium) point | |
| conversion probability | |
| the occurrence probability of an event “·” | |
| minimum conversion time | |
| average conversion time | |
| minimum conversion time | |
| power spectrum of GBN | |
| backward shift operator | |
| n-dimensional Euclidean space | |
| n-dimensional identity matrix | |
| N | prediction horizon |
| state (input, output) vector of identification model | |
| backward shift operator | |
| intermediate augmented state of NMSS model | |
| system state of NMSS model | |
| system matrices of identification model | |
| system matrices for NMSS model | |
| controllable and observable part of NMSS model | |
| system state of minimal realization for NMSS model | |
| P | terminal weighting matrix |
| positive-definite weighting matrices | |
| the lower (upper) bound of input | |
| ellipsoid invariant set | |
| r | the radius of an ellipsoid |
| the value of vector h at time , predicted at time k | |
| the minimal eigenvalue of matrix Q |
References
- Moon, U.; Lee, K.Y. An adaptive dynamic matrix control with fuzzy-interpolated step-response model for a drum-type boiler-turbine system. IEEE Trans. Energy Convers. 2011, 26, 393–401. [Google Scholar] [CrossRef]
- Kong, X.; Liu, X.; Lee, K. Nonlinear multivariable hierarchical model predictive control for boiler-turbine system. Energy 2015, 93, 309–322. [Google Scholar] [CrossRef]
- Wang, C.; Liu, M.; Zhao, Y.; Qiao, Y.; Chong, D.; Yan, J. Dynamic modeling and operation optimization for the cold end system of thermal power plants during transient processes. Energy 2018, 145, 734–746. [Google Scholar] [CrossRef]
- Habbi, H.; Zelmat, M.; Bouamama, B. A dynamic fuzzy model for a drum-boiler-turbine system. Automatica 2003, 39, 1213–1219. [Google Scholar] [CrossRef]
- Wen, T.; Marquez, H.; Chen, T.; Liu, J. Analysis and control of a nonlinear boiler-turbine unit. J. Process Control 2005, 15, 883–891. [Google Scholar] [CrossRef]
- Moon, U.; Lee, K. Step-response model development for dynamic matrix control of a drum-type boiler-turbine system. IEEE Trans. Energy Convers. 2009, 24, 423–430. [Google Scholar] [CrossRef]
- Li, S.; Liu, H.; Cai, W.; Soh, Y.; Xie, L. A new coordinated control strategy for boiler-turbine system of coal-fired power plant. IEEE Trans. Control Syst. Technol. 2005, 13, 943–954. [Google Scholar] [CrossRef]
- Peng, H.; Ozaki, T.; Haggan-Ozaki, V.; Toyoda, Y. A nonlinear exponential ARX model-based multivariable generalized predictive control strategy for thermal power plants. IEEE Trans. Control Syst. Technol. 2002, 10, 256–262. [Google Scholar] [CrossRef]
- Peng, H.; Wu, J.; Inoussa, G.; Deng, Q.; Nakano, K. Nonlinear system modeling and predictive control using the RBF nets-based quasi-linear ARX model. Control Eng. Pract. 2009, 17, 59–66. [Google Scholar] [CrossRef]
- Peng, H.; Kitagawa, G.; Wu, J.; Ohtsu, K. Multivariable RBF-ARX model-based robust MPC approach and application to thermal power plant. Appl. Math. Model. 2011, 35, 3541–3551. [Google Scholar] [CrossRef]
- Geyer, T.; Papafotiou, G.; Morari, M. Model predictive direct torque control-part I: Concept, algorithm, and analysis. IEEE Trans. Ind. Electron. 2009, 56, 1894–1905. [Google Scholar] [CrossRef]
- Zhang, R.; Sheng, W.; Cao, Z.; Lu, J.; Gao, F. A systematic min-max optimization design of constrained model predictive tracking control for industrial processes against uncertainty. IEEE Trans. Control Syst. Technol. 2018, 26, 2157–2164. [Google Scholar] [CrossRef]
- Li, M.; Ping, Z.; Hong, W.; Chai, T. Nonlinear multiobjective MPC-based optimal operation of a high consistency refining system in papermaking. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 1208–1215. [Google Scholar] [CrossRef]
- Santander, O.; Elkamel, A.; Budman, H. Economic model predictive control of chemical processes with parameter uncertainty. Comput. Chem. Eng. 2016, 95, 10–20. [Google Scholar] [CrossRef]
- He, D.; Wang, L.; Yu, L. Multi-objective nonlinear predictive control of process systems: A dual-mode tracking control approach. J. Process Control 2015, 25, 142–151. [Google Scholar] [CrossRef]
- Elsisi, M.; Ebrahim, M.A. Optimal design of low computational burden model predictive control based on SSDA towards autonomous vehicle under vision dynamics. Int. J. Intell. Syst. 2021, 36, 6968–6987. [Google Scholar] [CrossRef]
- Wang, J.; Ding, B.; Hu, J. Security control for LPV system with deception attacks via model predictive control: A dynamic output feedback approach. IEEE Trans. Autom. Control 2021, 66, 760–767. [Google Scholar] [CrossRef]
- Elsisi, M.; Tran, M.; Hasanien, H.; Turky, R.; Albalawi, F.; Ghoneim, S. Robust model predictive control paradigm for automatic voltage regulators against uncertainty based on optimization algorithms. Mathematics 2021, 9, 2885. [Google Scholar] [CrossRef]
- Elsisi, M. Optimal design of nonlinear model predictive controller based on new modified multitracker optimization algorithm. Int. J. Intell. Syst. 2020, 35, 1857–1878. [Google Scholar] [CrossRef]
- Li, Y.; Shen, J.; Lee, K.; Liu, X. Offset-free fuzzy model predictive control of a boiler-turbine system based on genetic algorithm. Simul. Model. Pract. Theory 2012, 26, 77–95. [Google Scholar] [CrossRef]
- Wu, X.; Shen, J.; Li, Y.; Lee, K. Hierarchical optimization of boiler-turbine unit using fuzzy stable model predictive control. Control Eng. Pract. 2014, 30, 112–123. [Google Scholar] [CrossRef]
- Morteza, S.; Zahra, R.; Behrooz, R. Fuzzy predictive control of a boiler-turbine system based on a hybrid model system. Ind. Eng. Chem. Res. 2014, 53, 2362–2381. [Google Scholar] [CrossRef]
- Klaučo, M.; Kvasnica, M. Control of a boiler-turbine unit using MPC-based reference governors. Appl. Therm. Eng. 2017, 110, 1437–1447. [Google Scholar] [CrossRef]
- Zhang, Y.; Decardi-Nelson, B.; Liu, J.; Shen, J.; Liu, J. Zone economic model predictive control of a coal-fired boiler-turbine generating system. Chem. Eng. Res. Des. 2020, 153, 246–256. [Google Scholar] [CrossRef]
- awryńczuk, M. Nonlinear predictive control of a boiler-turbine unit: A state-space approach with successive on-line model linearisation and quadratic optimisation. ISA Trans. 2017, 67, 476–495. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; He, X. Modeling identification of power plant thermal process based on PSO algorithm. In Proceedings of the American Control Conference, Portland, OR, USA, 8–10 June 2005; pp. 4484–4489. [Google Scholar] [CrossRef]
- Moon, U.; Lee, K. A boiler-turbine system control using a fuzzy auto-regressive moving average (FARMA) Model. IEEE Trans. Energy Convers. 2003, 18, 142–148. [Google Scholar] [CrossRef]
- Kocaarslan, İ.; Ertuğrul, Ç.; Hasan, T. A fuzzy logic controller application for thermal power plants. Energy Convers. Manag. 2006, 47, 442–458. [Google Scholar] [CrossRef]
- Liu, X.; Kong, X. Nonlinear fuzzy model predictive iterative learning control for drum-type boiler-turbine system. J. Process Control 2013, 23, 1023–1040. [Google Scholar] [CrossRef]
- Strušnik, D.; Avsec, J. Artificial neural networking and fuzzy logic exergy controlling model of combined heat and power system in thermal power plant. Energy 2015, 80, 318–330. [Google Scholar] [CrossRef]
- Zhu, H.; Zhao, G.; Sun, L.; Lee, K.Y. Nonlinear predictive control for a boiler-turbine unit based on a local model network and immune genetic algorithm. Sustainability 2019, 11, 5102. [Google Scholar] [CrossRef] [Green Version]
- Elsisi, M. Optimal design of non-fragile PID controller. Asian J. Control 2021, 23, 729–738. [Google Scholar] [CrossRef]
- Ali, E.; Abd-Elazim, S. BFOA based design of PID controller for two area Load Frequency Control with nonlinearities. Int. J. Electr. Power Energy Syst. 2013, 51, 224–231. [Google Scholar] [CrossRef]
- Ismail, M.; Bendary, A.; Elsisi, M. Optimal design of battery charge management controller for hybrid system PV/wind cell with storage battery. Int. J. Electr. Power Energy Syst. 2020, 11, 412–429. [Google Scholar] [CrossRef]
- Elsisi, M.; Abdelfattah, H. New design of variable structure control based on lightning search algorithm for nuclear reactor power system considering load-following operation. Nucl. Eng. Technol. 2020, 52, 544–551. [Google Scholar] [CrossRef]
- Elsisi, M. Improved grey wolf optimizer based on opposition and quasi learning approaches for optimization: Case study autonomous vehicle including vision system. Artif. Intell. Rev. 2022, 55, 5597–5620. [Google Scholar] [CrossRef]
- Wang, L.; Young, P. An improved structure for model predictive control using non-minimal state space realisation. J. Process Control 2006, 16, 355–371. [Google Scholar] [CrossRef]
- Zhang, R.; Zou, Q.; Cao, Z.; Gao, F. Design of fractional order modeling based extended non-minimal state space MPC for temperature in an industrial electric heating furnace. J. Process Control 2017, 56, 13–22. [Google Scholar] [CrossRef]
- Zhang, J. Improved nonminimal state space model predictive control for multivariable processes using a non-zero-pole decoupling formulation. Ind. Eng. Chem. Res. 2013, 52, 4874–4880. [Google Scholar] [CrossRef]
- Wu, S. Multivariable PID control using improved state space model Predictive Control Optimization. Ind. Eng. Chem. Res. 2015, 54, 5505–5513. [Google Scholar] [CrossRef]
- Wu, X.; Shen, J.; Li, Y.; Lee, K. Data-driven modeling and predictive control for boiler-turbine unit. IEEE Trans. Energy Convers. 2013, 28, 470–481. [Google Scholar] [CrossRef]
- Tao, J.; Ma, L.; Zhu, Y. Improved control using extended non-minimal state space MPC and modified LQR for a kind of nonlinear systems. ISA Trans. 2016, 65, 319–326. [Google Scholar] [CrossRef] [PubMed]
- Bell, R.; Åström, K. Dynamic Models for Boiler Turbine Alternator Units: Data Logs and Parameter Estimation for 160 MW Unit; Lund Institute of Technology: Lund, Sweden, 1987. [Google Scholar]
- Tulleken, H. Generalized binary noise test-signal concept for improved identification-experiment design. Automatica 1990, 26, 37–49. [Google Scholar] [CrossRef]
- Lee, J.W.; Kwon, W.H.; Choi, J. On stability of constrained receding horizon control with finite terminal weighting matrix. Automatica 1998, 34, 1607–1612. [Google Scholar] [CrossRef]
- Lee, J. Exponential stability of constrained receding horizon control with terminal ellipsoid constraints. IEEE Trans. Autom. Control 2000, 45, 83–88. [Google Scholar] [CrossRef]
- Wei, L.; Fang, F. H∞-LQR-based coordinated control for large coal-fired boiler-turbine generation units. IEEE Trans. Ind. Electron. 2017, 64, 5212–5221. [Google Scholar] [CrossRef]













Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Ding, B.; Wang, P. Modeling and Finite-Horizon MPC for a Boiler-Turbine System Using Minimal Realization State-Space Model. Energies 2022, 15, 7935. https://doi.org/10.3390/en15217935
Wang J, Ding B, Wang P. Modeling and Finite-Horizon MPC for a Boiler-Turbine System Using Minimal Realization State-Space Model. Energies. 2022; 15(21):7935. https://doi.org/10.3390/en15217935
Chicago/Turabian StyleWang, Jun, Baocang Ding, and Ping Wang. 2022. "Modeling and Finite-Horizon MPC for a Boiler-Turbine System Using Minimal Realization State-Space Model" Energies 15, no. 21: 7935. https://doi.org/10.3390/en15217935
APA StyleWang, J., Ding, B., & Wang, P. (2022). Modeling and Finite-Horizon MPC for a Boiler-Turbine System Using Minimal Realization State-Space Model. Energies, 15(21), 7935. https://doi.org/10.3390/en15217935