
A Composite Variable Structure PI Controller for Sensorless Speed Control Systems of IPMSM


Abstract
:1. Introduction
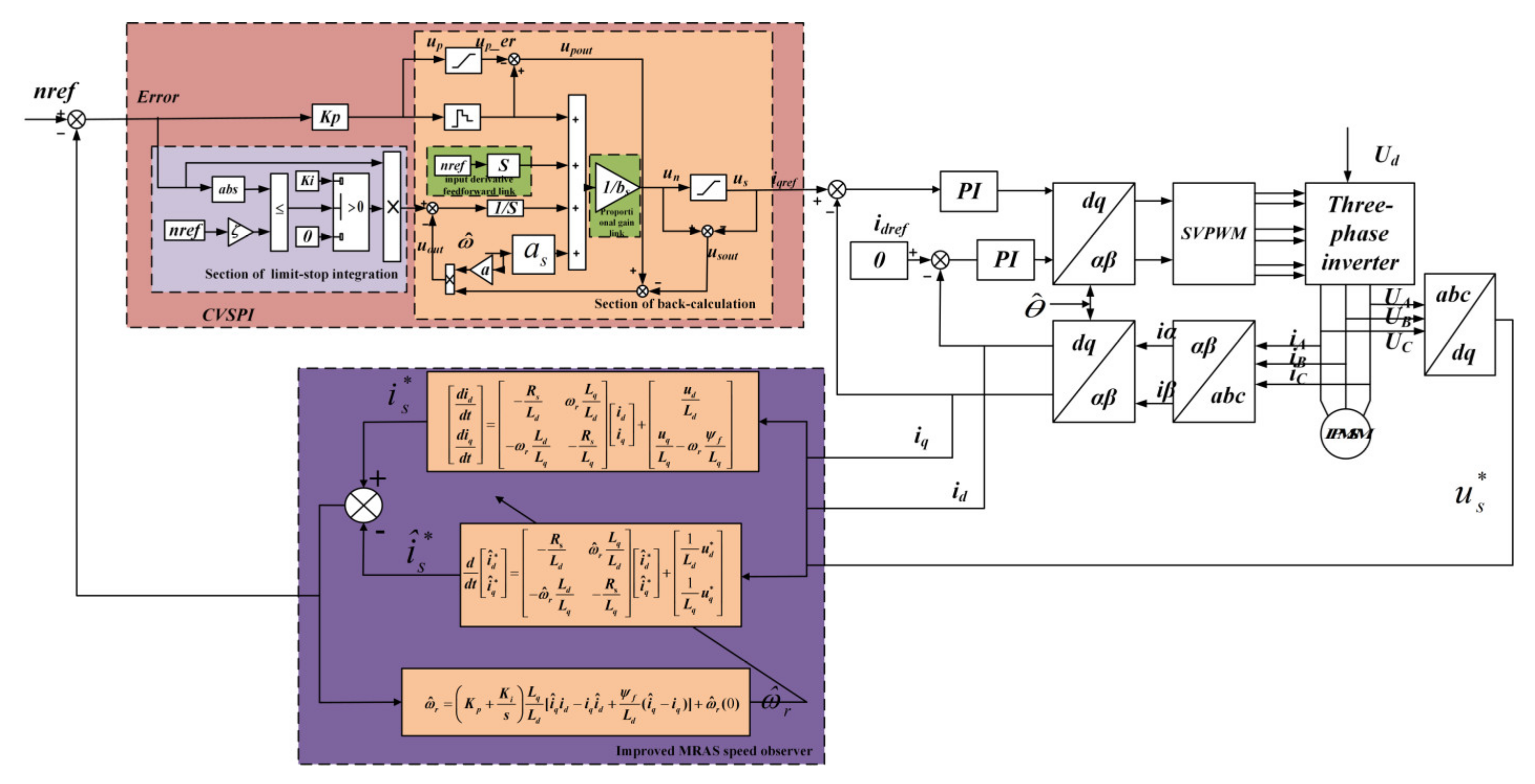
2. Composite Variable Structure PI Speed Controller
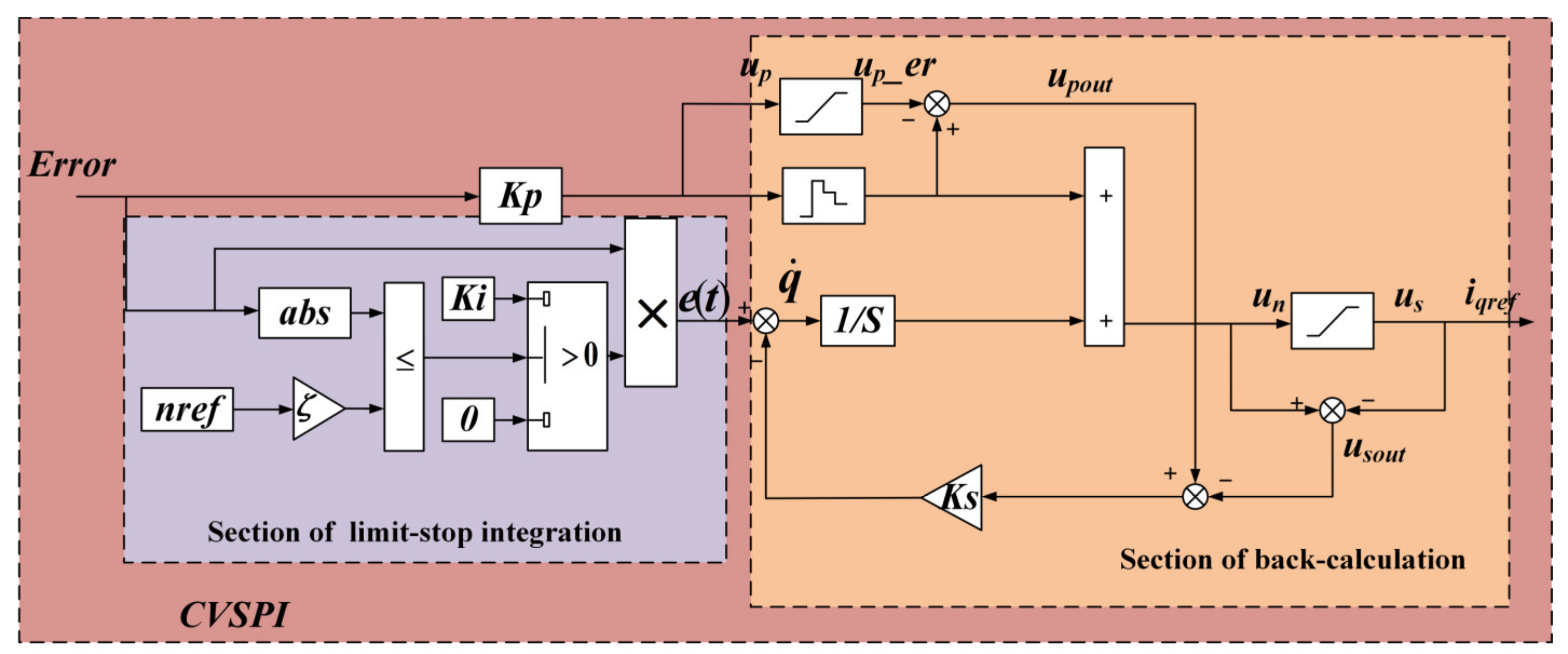
2.1. Design of the Composite Variable Structure PI
2.2. CVSPI Controller Design Based on State Equations
- is the rotor mechanical angular speed;
- is the rotational inertia;
- is the viscous friction factor.
2.3. Performance Analysis of Variable Structure Composite Speed Controllers
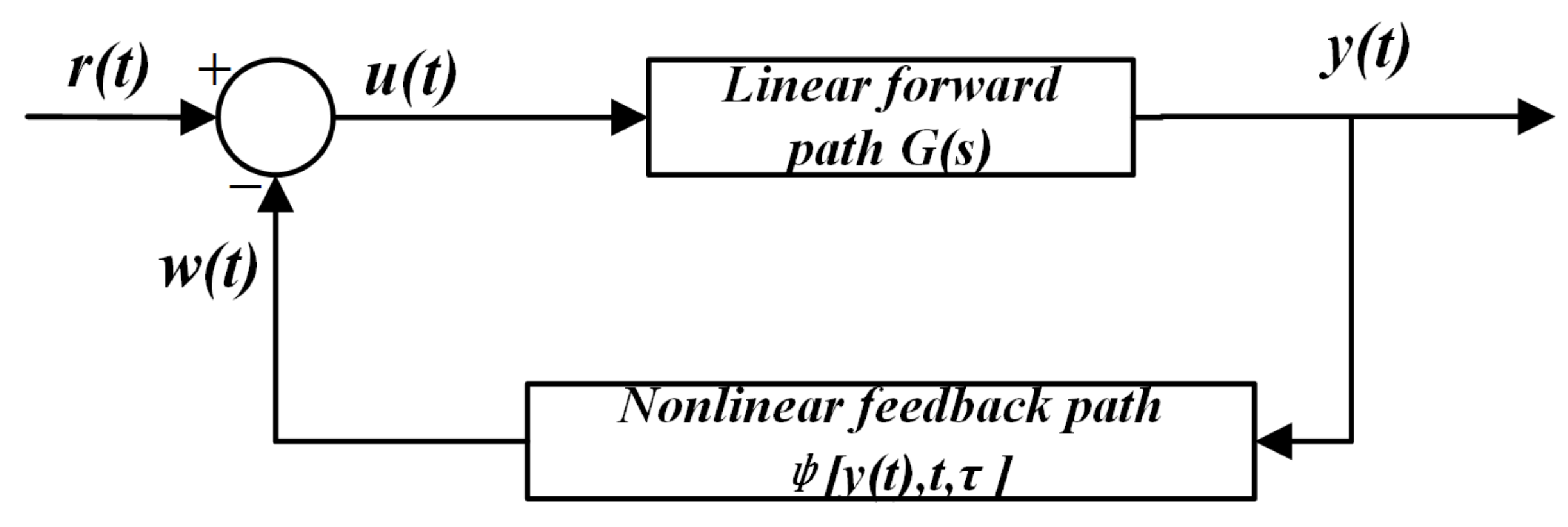
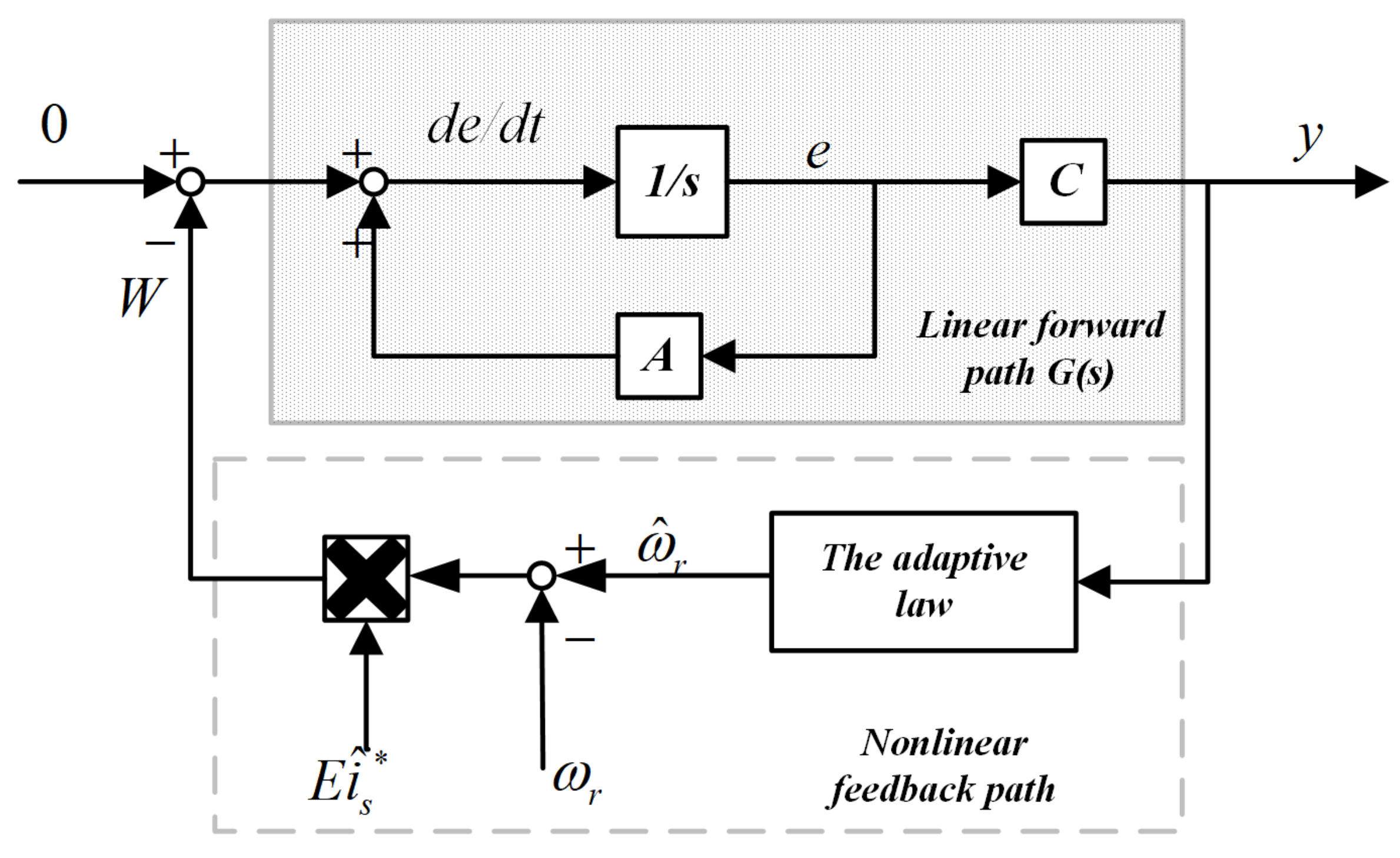
3. Improved MRAS Speed Observer
- 1.
- The transfer function matrix of the forward path is strictly orthogonal, i.e.,:
- 2.
- The inputs and outputs of the feedback path satisfy Popov’s inequality:
3.1. Selection of the Linear Compensator Matrix C
3.2. Design of the Adaptive Law
4. Simulation Results and Analysis
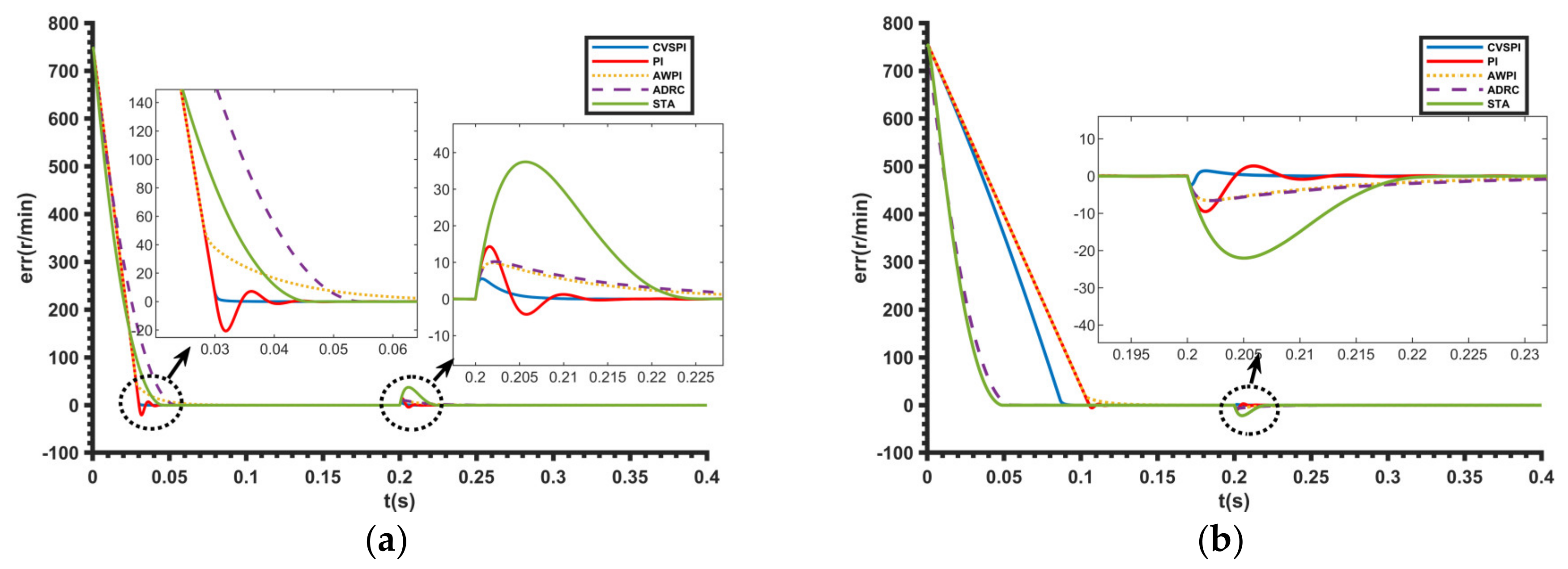
4.1. Test of System Dynamic Followership
4.2. Evaluation of System Immunity
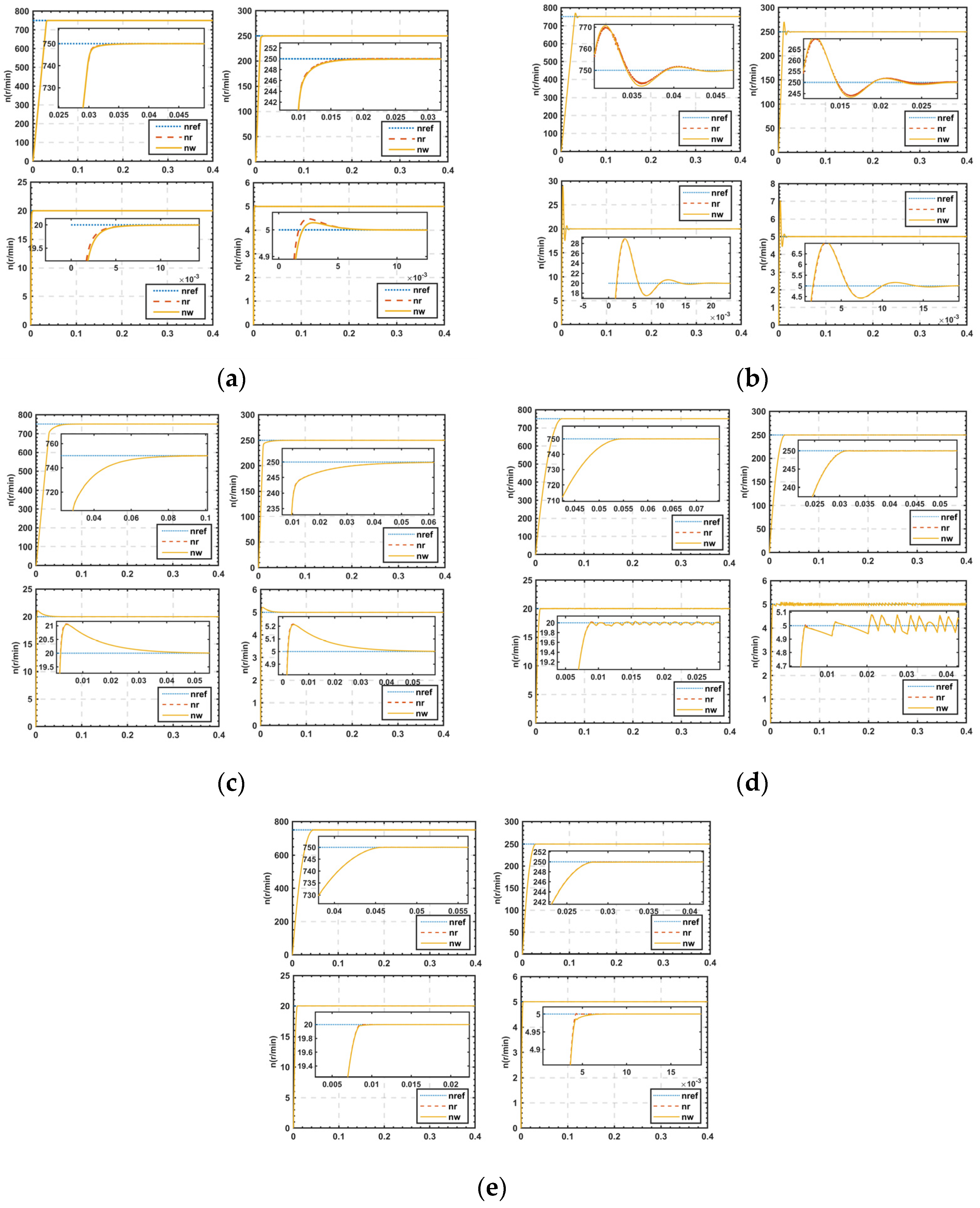
4.3. Evaluation of Systemwide Speed Domain Performance
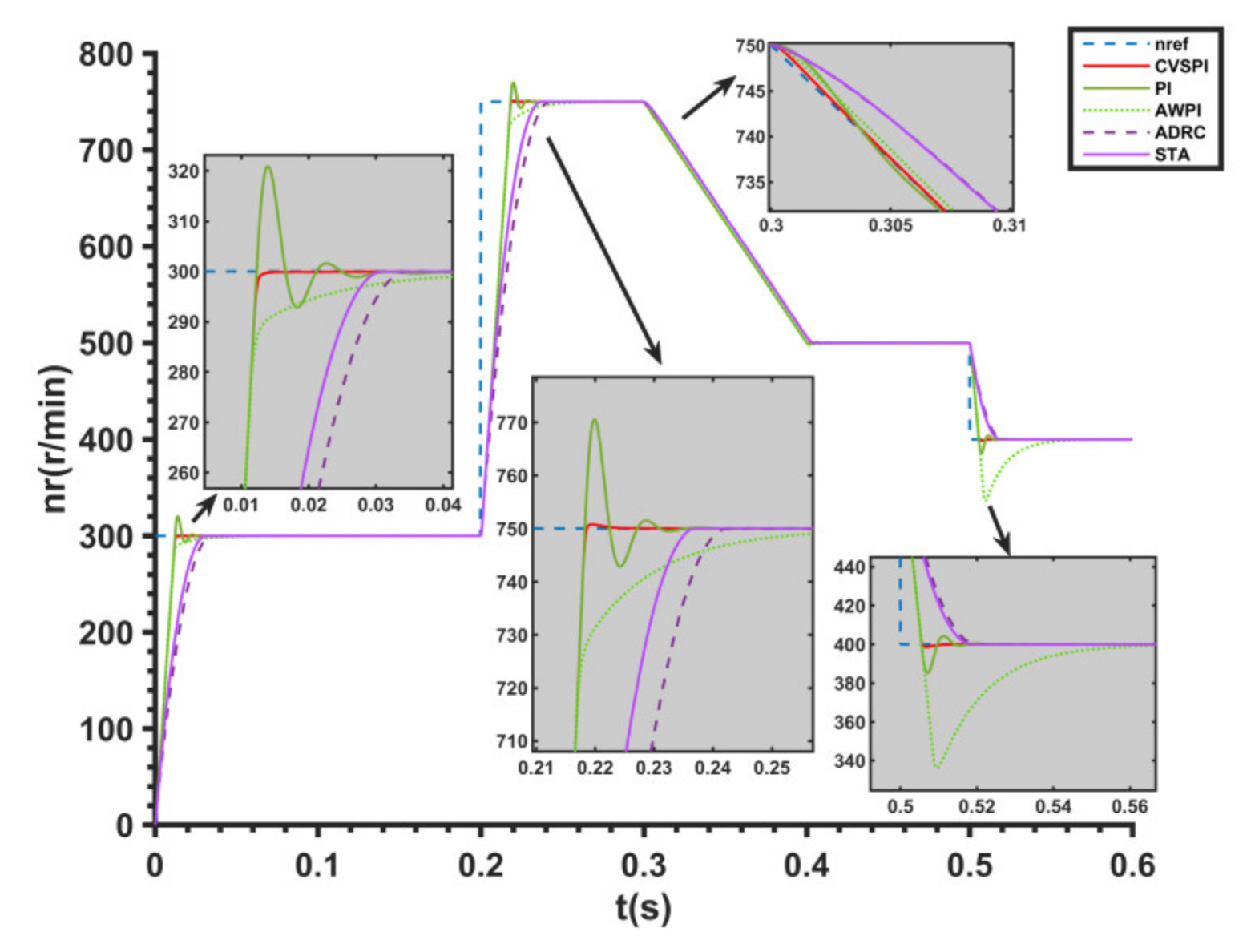
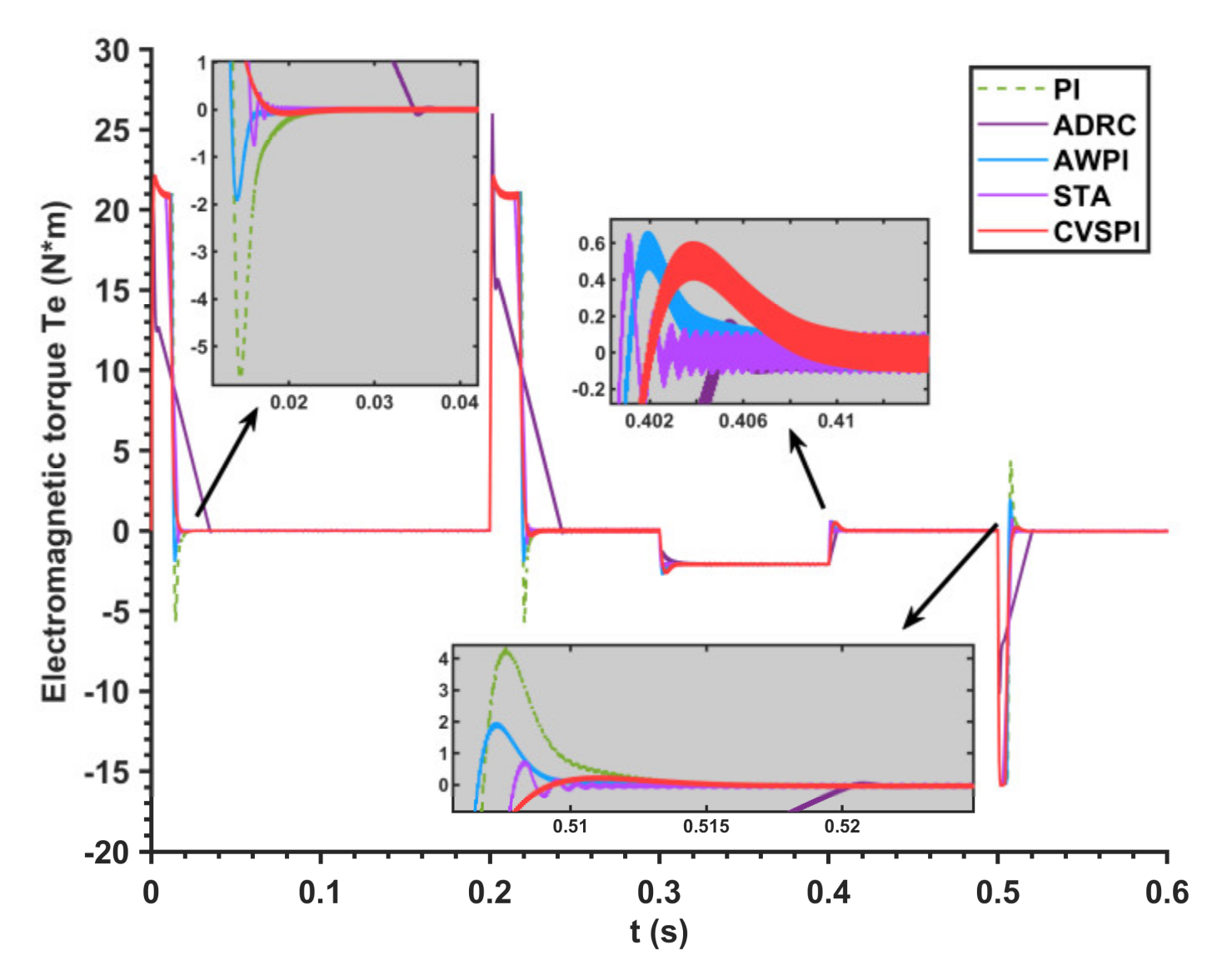
4.4. Analyzing the Effects of a Sudden Change in Speed While Maintaining a Consistent Torque Load
5. Conclusions
- (1)
- To minimize or do away with speed overshoot and speed-free control system regulation time, this paper builds on the foundation of the conventional AWPI by integrating the benefits of the encounter limit stop integral method and the inverse calculation method to design a CVSPI controller for use in IPMSM speed-free control systems.
- (2)
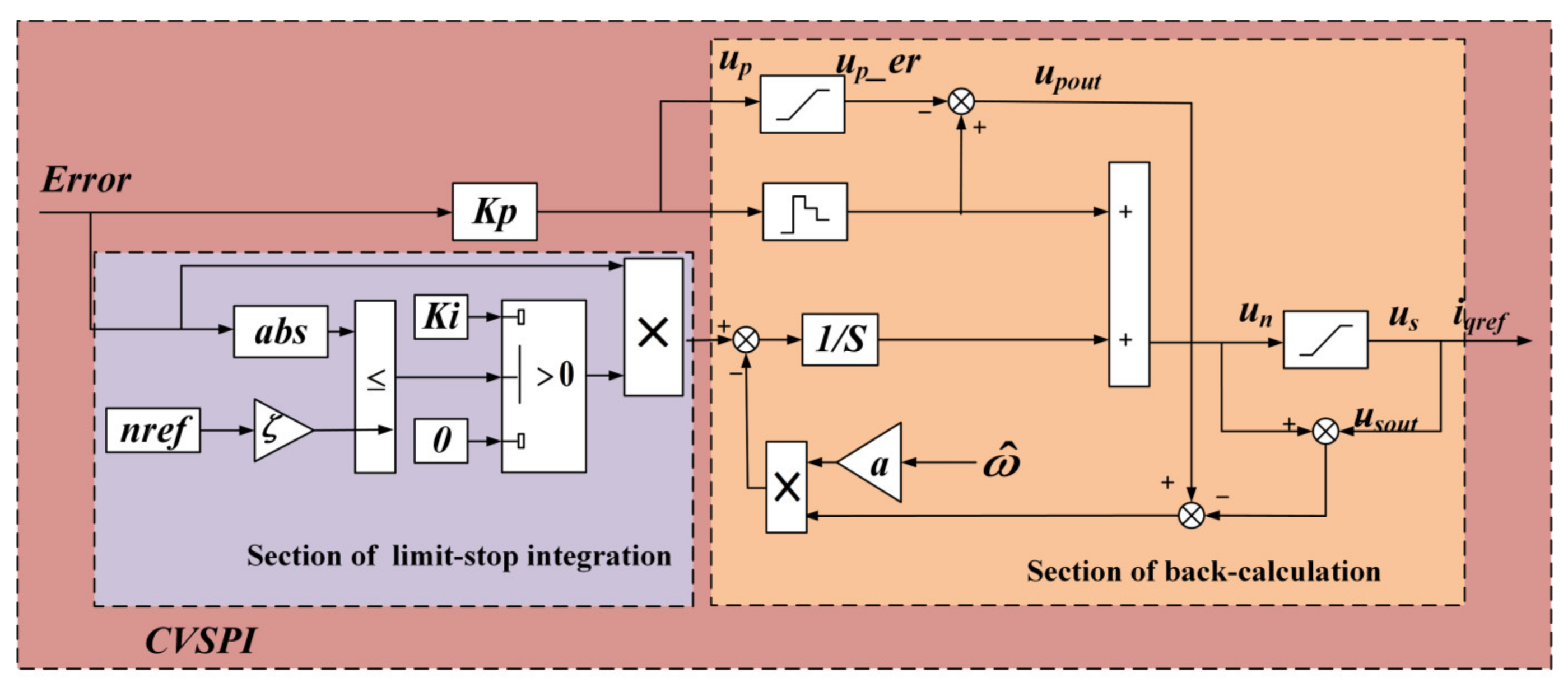
- Using the inverse calculation idea to introduce the MRAS estimated speed into the anti-saturation gain to accurately compensate for the system state, enabling the system to quickly exit the integral saturation zone, suppressing the integral saturation phenomenon, and improving the immunity of the system.
- (3)
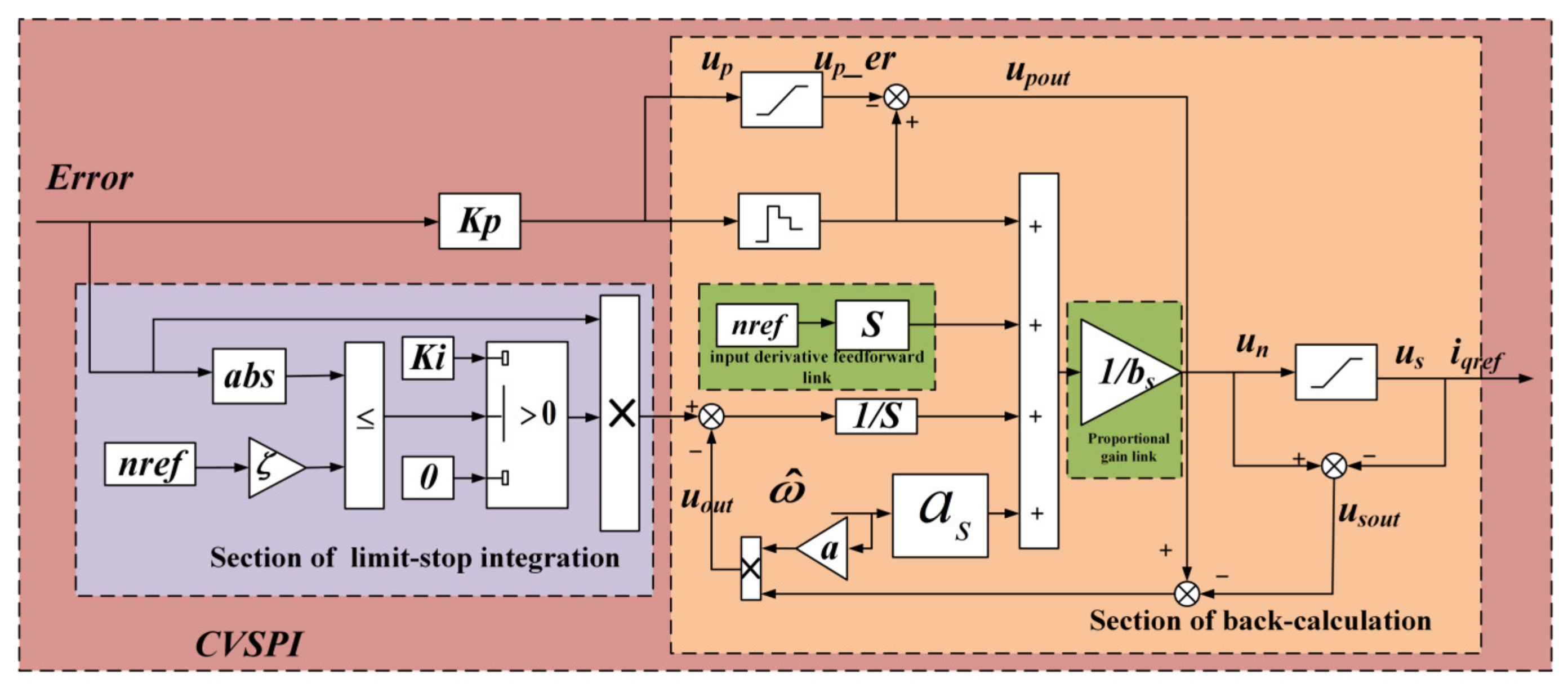
- Adding a feed-forward link for a given input differential to accurately respond to time-varying inputs and enhance the speed loop tracking response performance.
- (4)
- CVSPI can achieve relatively good dynamic following performance using only one set of traditional PI controller parameters. The parameters are relatively easy to adjust.
- (5)
- To enable MRAS to operate efficiently over a wide speed range, a new linear compensator was designed, and a new speed adaptive law was derived.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, X.; Tao, R.; Xu, X.; Wang, T.; Zhang, H. Predictive Current Control of a PMSM Three-Level Dual-Vector Model Based on Self-Anti-Disturbance Techniques. J. Electr. Eng. Technol 2022, 17, 3375–3388. [Google Scholar] [CrossRef]
- Zhang, L.; Bai, J.; Wu, J. Speed Sensor-Less Control System of Surface-Mounted Permanent Magnet Synchronous Motor Based on Adaptive Feedback Gain Supertwisting Sliding Mode Observer. J. Sens. 2021, 2021, 8301359. [Google Scholar] [CrossRef]
- Wang, F.; Li, J.; Li, Z.; Ke, D.; Du, J.; Garcia, C.; Rodriguez, J. Design of Model Predictive Control Weighting Factors for PMSM Using Gaussian Distribution-Based Particle Swarm Optimization. IEEE Trans. Ind. Electron. 2022, 69, 10935–10946. [Google Scholar] [CrossRef]
- Liu, Q.; Hameyer, K. High-Performance Adaptive Torque Control for an IPMSM With Real-Time MTPA Operation. IEEE Trans. Energy Convers. 2017, 32, 571–581. [Google Scholar] [CrossRef]
- Liu, Y.; Fang, J.; Tan, K.; Huang, B.; He, W. Sliding mode observer with adaptive parameter estimation for sensorless control of IPMSM. Energies 2020, 13, 5991. [Google Scholar] [CrossRef]
- Liu, K.; Hou, C.; Hua, W. A Novel Inertia Identification Method and Its Application in PI Controllers of PMSM Drives. IEEE Access 2019, 7, 13445–13454. [Google Scholar] [CrossRef]
- Hussain, H.A. Tuning and Performance Evaluation of 2DOF PI Current Controllers for PMSM Drives. IEEE Trans. Transp. Electrif. 2021, 7, 1401–1414. [Google Scholar] [CrossRef]
- Kesavan, P.; Karthikeyan, A. Electromagnetic Torque-Based Model Reference Adaptive System Speed Estimator for Sensorless Surface Mount Permanent Magnet Synchronous Motor Drive. IEEE Trans. Ind. Electron. 2020, 67, 5936–5947. [Google Scholar] [CrossRef]
- Khlaief, A.; Boussak, M.; Chaari, A. A MRAS-based stator resistance and speed estimation for sensorless vector controlled IPMSM drive. Electr. Power Syst. Res. 2014, 108, 1–15. [Google Scholar] [CrossRef]
- Savitski, D.; Ivanov, V.; Augsburg, K.; Emmei, T.; Fuse, H.; Fujimoto, H.; Fridman, L.M. Wheel Slip Control for the Electric Vehicle With In-Wheel Motors: Variable Structure and Sliding Mode Methods. IEEE Trans. Ind. Electron. 2019, 99, 8535–8544. [Google Scholar] [CrossRef]
- Tursini, M.; Parasiliti, F.; Zhang, D. Real-time gain tuning of PI controllers for high-performance PMSM drives. IEEE Trans. Ind. Appl. 2002, 38, 1018–1026. [Google Scholar] [CrossRef]
- Nalepa, R. Generic criterion for tuning of adaptive digital PI current compensators of PMSM drives. IEEE Int. Symp. Ind. Electron. 2011, 2011, 601–606. [Google Scholar] [CrossRef]
- Gücin, T.N.; Biberoğlu, M.; Fincan, B.; Gülbahçe, M.O. Tuning cascade PI(D) controllers in PMDC motor drives: A performance comparison for different types of tuning methods. Int. Conf. Electr. Electron. Eng. 2015, 2015, 1061–1066. [Google Scholar] [CrossRef]
- Xiao, X.; Li, Y.; Li, M. Performance control of PMSM drives using a self-tuning PID. IEEE Int. Conf. Electr. Mach. Drives 2005, 2005, 1053–1057. [Google Scholar] [CrossRef]
- Djelamda, I.; Bouchareb, I.; Lebaroud, A. High performance hybrid FOC-fuzzy-PI controller for PMSM drives. Eur. J. Electr. Eng. 2021, 23, 301–310. [Google Scholar] [CrossRef]
- Sarsembayev, B.; Suleimenov, K.; Do, T.D. High Order Disturbance Observer Based PI-PI Control System with Tracking Anti-Windup Technique for Improvement of Transient Performance of PMSM. IEEE Access 2021, 9, 66323–66334. [Google Scholar] [CrossRef]
- Repecho, V.; Waqar, J.; Biel, D.; Doria-Cerezo, A. Zero speed sensorless scheme for PMSM under decoupled sliding mode control. IEEE Trans. Ind. Electron. 2021, 99, 1288–1297. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, Y.; Zou, J. Sliding-Mode Sensorless Control of PMSM With Inverter Nonlinearity Compensation. IEEE Trans. Power Electron. 2019, 2019, 10206–10220. [Google Scholar] [CrossRef]
- Lu, E.; Li, W.; Yang, X.; Liu, Y. Anti-disturbance speed control of low-speed high-torque PMSM based on second-order non-singular terminal sliding mode load observer. ISA Trans. 2018, 88, 142–152. [Google Scholar] [CrossRef]
- Wang, S. ADRC and Feedforward Hybrid Control System of PMSM. Math. Probl. Eng. 2013, 2013, 180179. [Google Scholar] [CrossRef]
- Rong, Z.; Huang, Q. A new PMSM speed modulation system with sliding mode based on active-disturbance-rejection control. J. Cent. South Univ. 2016, 23, 1406. [Google Scholar] [CrossRef]
- Gai, J.; Huang, S.; Huang, Q.; Li, M.; Wang, H.; Luo, D.; Wu, X.; Liao, W. A new fuzzy active-disturbance rejection controller applied in PMSM position servo system. Int. Conf. Electr. Mach. Syst. 2014, 2014, 2055. [Google Scholar] [CrossRef]
- Roy, P.; Roy, B.K. Dual mode adaptive fractional order PI controller with feed-forward controller based on variable parameter model for quadruple tank process. Isa Trans. 2016, 63, 365–376. [Google Scholar] [CrossRef] [PubMed]
- Gao, P.; Zhang, G.; Lv, X. Model-Free Hybrid Control with Intelligent Proportional Integral and Super-Twisting Sliding Mode Control of PMSM Drives. Electronics 2020, 9, 1427. [Google Scholar] [CrossRef]
- Liang, D.; Jian, L.; Qu, R. Super-twisting algorithm based sliding mode observer for wide-speed range PMSM sensorless control considering VSI nonlinearity. In Proceedings of the 2017 IEEE International Electric Machines and Drives Conference (IEMDC), Miami, FL, USA, 21–24 May 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Lee, K.; Ha, J.; Simili, D. Decoupled current control with novel anti-windup for PMSM drives. In Proceedings of the 2017 IEEE Energy Conversion Congress and Exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017; pp. 1183–1190. [Google Scholar] [CrossRef]
- Yang, M.; Tang, S.; Xu, D. Comments on “Antiwindup Strategy for PI-Type Speed Controller”. IEEE Trans. Ind. Electron. 2015, 62, 1329–1332. [Google Scholar] [CrossRef]
- Turner, M.C.; Sofrony, J.; Prempain, E. Anti-windup for model-reference adaptive control schemes with rate-limits. Syst. Control. Lett. 2020, 137, 104630. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| 25 | |
| 750 | |
| 2.875 | |
| 8.5 | |
| 8.0 | |
| 0.175 | |
| 4 | |
| 0.008 |
| Control Strategies | CVSPI | PI | AWPI | ADRC | STA | Unit |
|---|---|---|---|---|---|---|
| Response time | 0.01 | 0.02 | 0.026 | 0.026 | 0.028 | s |
| Start overshoot | 0 | 7.69% | 0 | 0 | 0 | |
| The error between the actual speed and the estimated speed | ±0.6 | ±2.0 | ±1.5 | ±0.8 | ±0.8 | r/min |
| The steady-state error between the given speed and the estimated speed | ±0.01 | ±0.1 | ±2 | ±5.2 | ±5 | r/min |
| Control Strategies | CVSPI | PI | AWPI | ADRC | STA | Unit |
|---|---|---|---|---|---|---|
| Response time | 0.02 | 0.04 | 0.042 | 0.05 | 0.05 | s |
| Start overshoot | 0 | 5.67% | 0 | 0 | 0 | |
| The error between the actual speed and the estimated speed | ±0.6 | ±2.0 | ±1.5 | ±0.8 | ±0.8 | r/min |
| The steady-state error between the given speed and the estimated speed | ±0.01 | ±0.1 | ±2 | ±10 | ±10 | r/min |
| Control Strategies | CVSPI | PI | AWPI | ADRC | STA | Unit |
|---|---|---|---|---|---|---|
| Response time | 0.03 | 0.05 | 0.06 | 0.055 | 0.04 | s |
| Start overshoot | 0 | 7.69% | 0 | 0 | 0 | |
| Regulation time | 10 | 15 | 17 | 20 | 30 | ms |
| Speed variation under load disturbance | 10 | 20 | 18 | 18 | 40 | r/min |
| Control Strategies | CVSPI | PI | AWPI | ADRC | STA | Unit |
|---|---|---|---|---|---|---|
| Response time | 0.08 | 0.12 | 0.12 | 0.06 | 0.04 | s |
| Start overshoot | 0 | 2.39% | 0 | 0 | 0 | |
| Regulation time | 10 | 15 | 18 | 20 | 20 | ms |
| Speed variation under load disturbance | 8 | 18 | 15 | 15 | 40 | r/min |
| Control Strategies | 750 r/min | 250 r/min | 20 r/min | 5 r/min |
|---|---|---|---|---|
| CVSPI | Smooth | Smooth | Smooth | Smooth |
| PI | Overtones | Overtones | Fluctuations | Fluctuations |
| AWPI | Smooth | Smooth | Overtones | Overtones |
| ADRC | Smooth | Smooth | Smooth | Severe chatter |
| STA | Smooth | Smooth | Smooth | Smooth |
| Control Strategies | CVSPI | PI | AWPI | ADRC | STA |
|---|---|---|---|---|---|
| Step-up signal | Smooth | Overtones | Smooth | Smooth | Smooth |
| Step-down signal | Smooth | Overtones | Overtones | Smooth | Smooth |
| Ramp signal | Accuracy | Accuracy | Accuracy | With steady-state error | With steady-state error |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, W.; Bai, J.; Zhang, Z.; Zhang, J. A Composite Variable Structure PI Controller for Sensorless Speed Control Systems of IPMSM. Energies 2022, 15, 8292. https://doi.org/10.3390/en15218292
Feng W, Bai J, Zhang Z, Zhang J. A Composite Variable Structure PI Controller for Sensorless Speed Control Systems of IPMSM. Energies. 2022; 15(21):8292. https://doi.org/10.3390/en15218292
Chicago/Turabian StyleFeng, Weidong, Jing Bai, Zhiqiang Zhang, and Jing Zhang. 2022. "A Composite Variable Structure PI Controller for Sensorless Speed Control Systems of IPMSM" Energies 15, no. 21: 8292. https://doi.org/10.3390/en15218292
APA StyleFeng, W., Bai, J., Zhang, Z., & Zhang, J. (2022). A Composite Variable Structure PI Controller for Sensorless Speed Control Systems of IPMSM. Energies, 15(21), 8292. https://doi.org/10.3390/en15218292