
Design Modifications for a Thermoelectric Distiller with Feedback Control


Abstract
:1. Introduction
- The main contribution is the modified thermoelectric design. This new design includes adding a heat sink with a fan to the distiller cold tank outer face to attenuate the heat effect from the system. This facilitates controlling the temperature of the distiller cold tank.
- Proposing a closed loop feedback control method where the output performance is compared with standard open loop control methods.
- Proposing and implementing two feedback control systems, PID and MPC controllers, to control the operation of the thermoelectric distiller by manipulating the rotational speed of the fan and the TEM input voltage in the MPC case. The proposed control strategy successfully handles various unknown disturbances keeping the system at the desired operating conditions.
- Additionally, an inclined cover of the thermoelectric distiller has been introduced to facilitate the collection of condensed drops of distilled water.
2. System Description
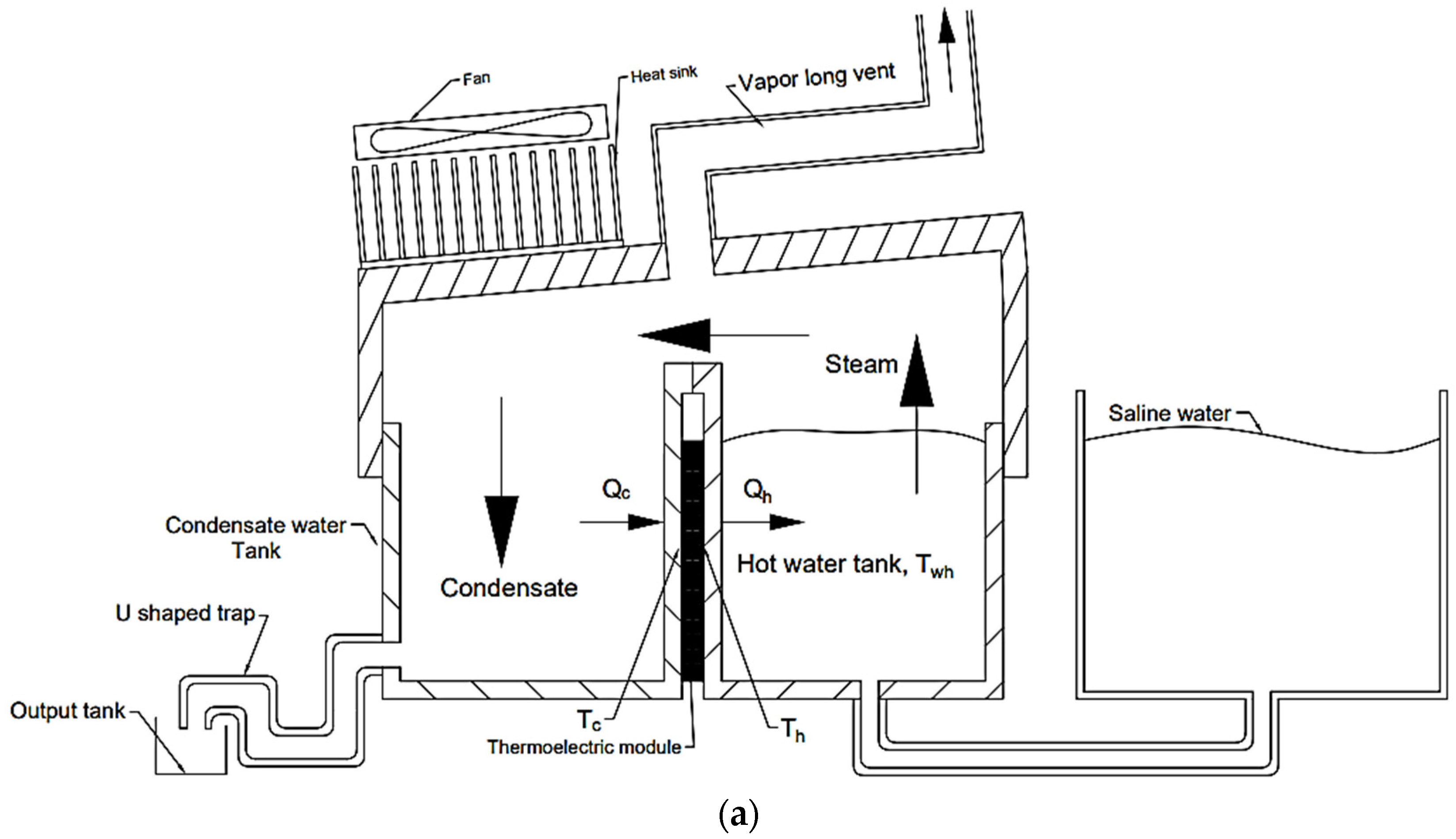
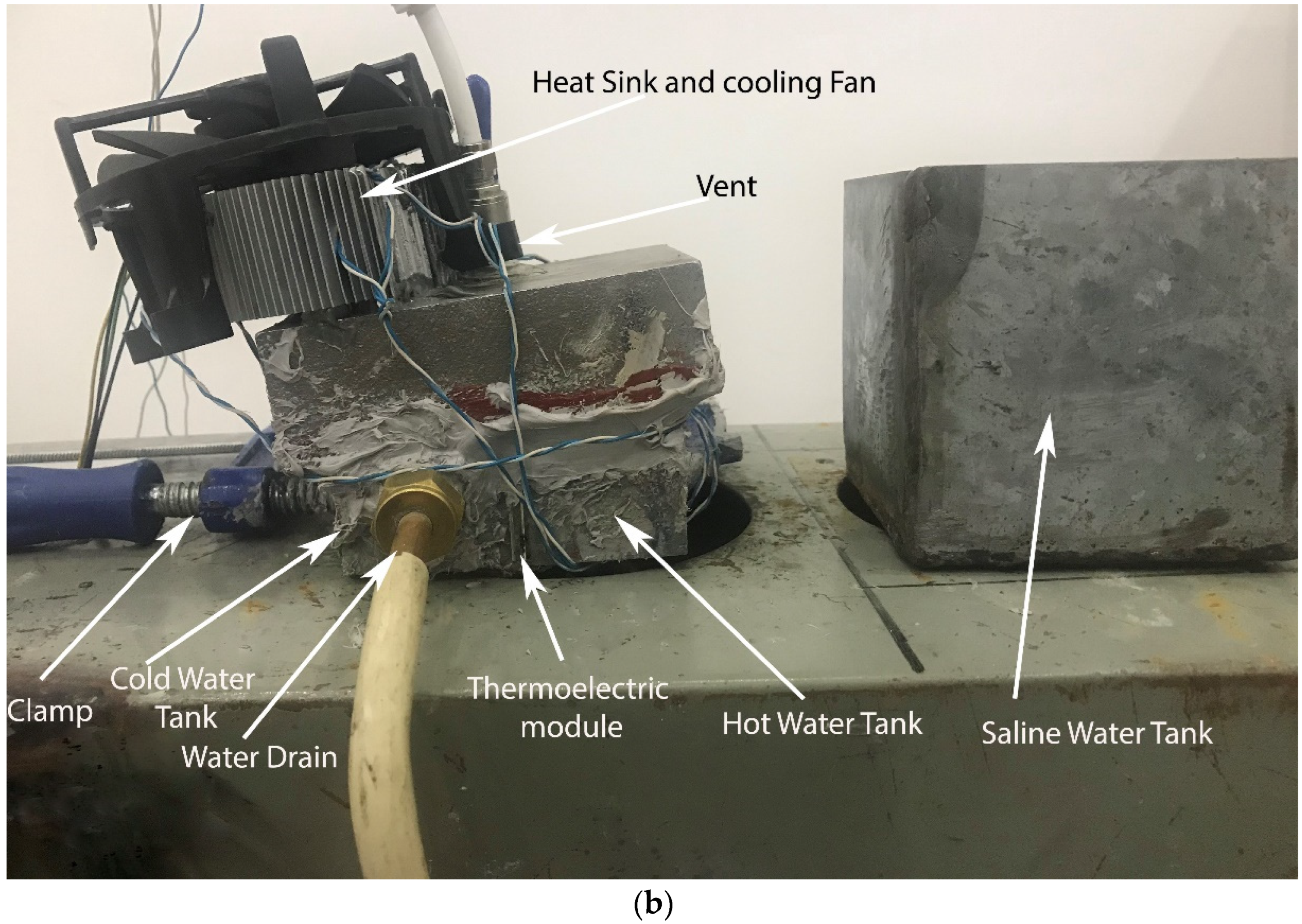
2.1. The Proposed Thermoelectric Distiller Design
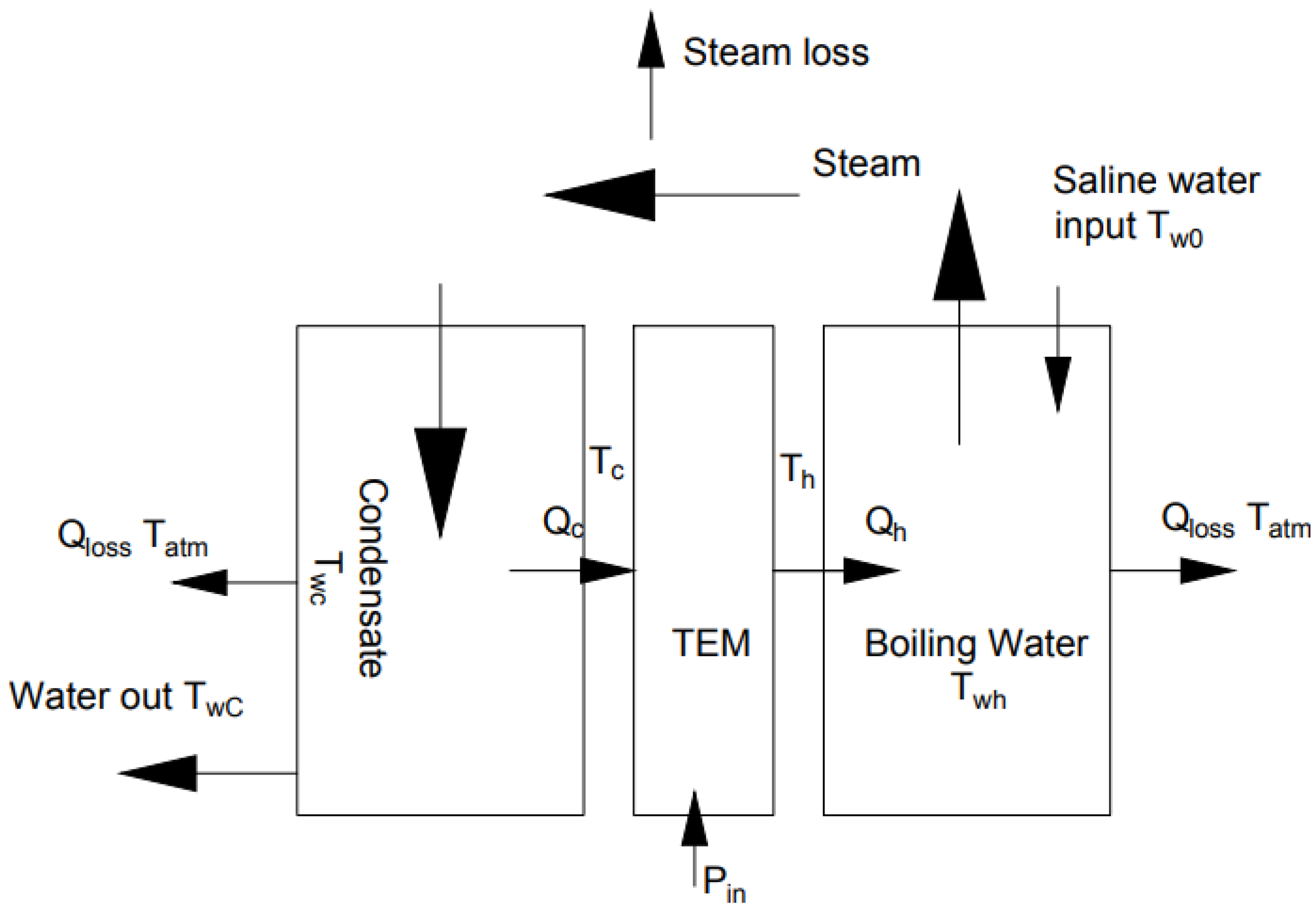
2.2. Mathematical Modeling of the System
- (A)
- To simplify the model, the following assumptions were used:
- (B)
- while boiling.
- (C)
- in the hot tank.
- (D)
- The distiller pressure is equal to the atmospheric pressure due to the small vent in the design.
- (E)
- The thermal heat transfer resistances Rh, Rc, and Rout are constants.
3. Control System Description and the Model Identification
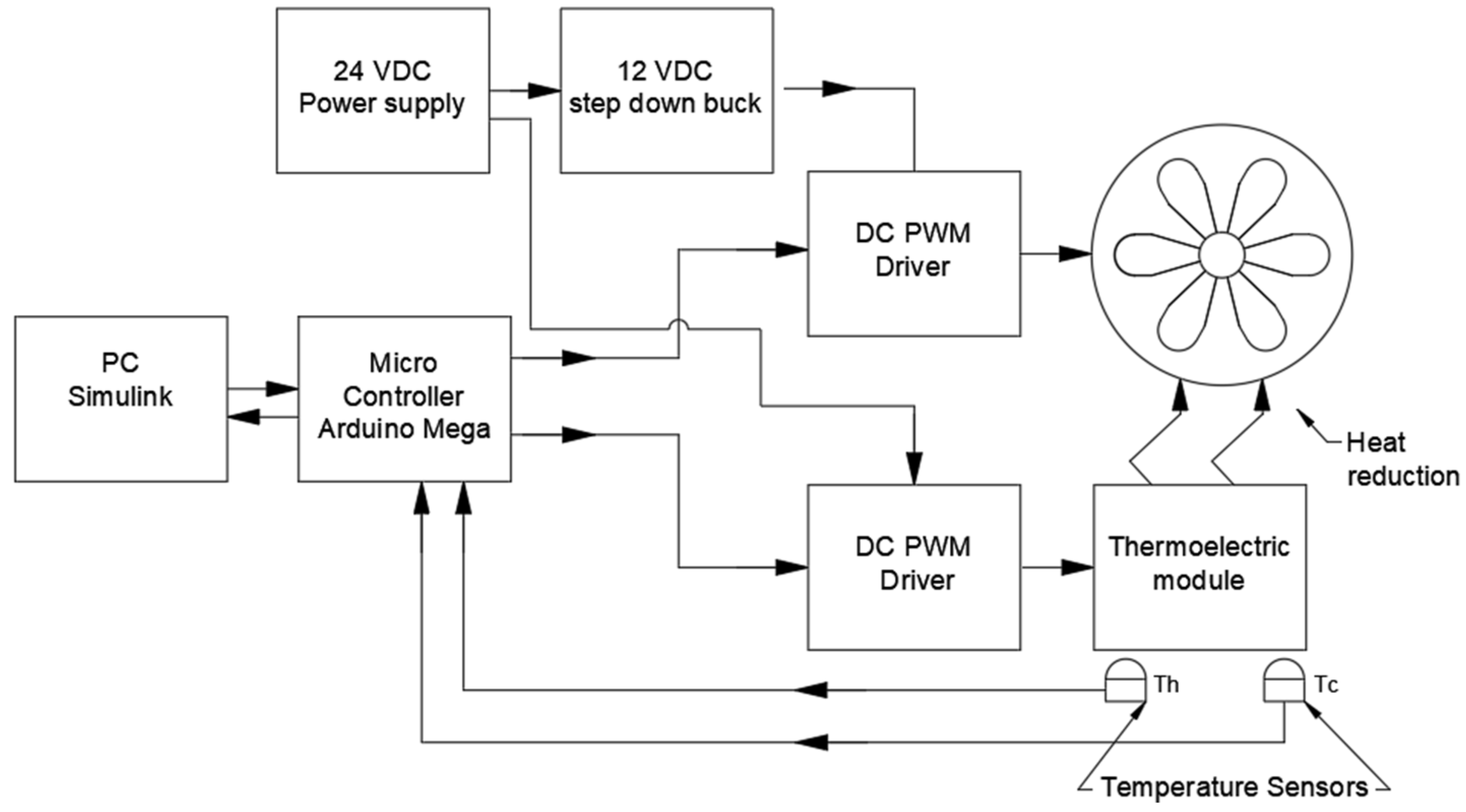
3.1. The Power Circuit of TEMD System
3.2. Control Methodology
- The first one is keeping a constant voltage for the TEM and controlling the fan rotational speed based on the pressure inside the system with no vapor vent. So, if the vapor production increases, the pressure will rise accordingly, and the controller will increase the fan speed to reduce the vapor and the pressure. This method was experimentally found to be difficult since the distiller vapor pressure value varies rapidly, and it requires to keep the system working at the equilibrium point by controlling the system’s input and output water flows. This control approach is similar to the steam power plant control system. Therefore, this method is not considered in this research.
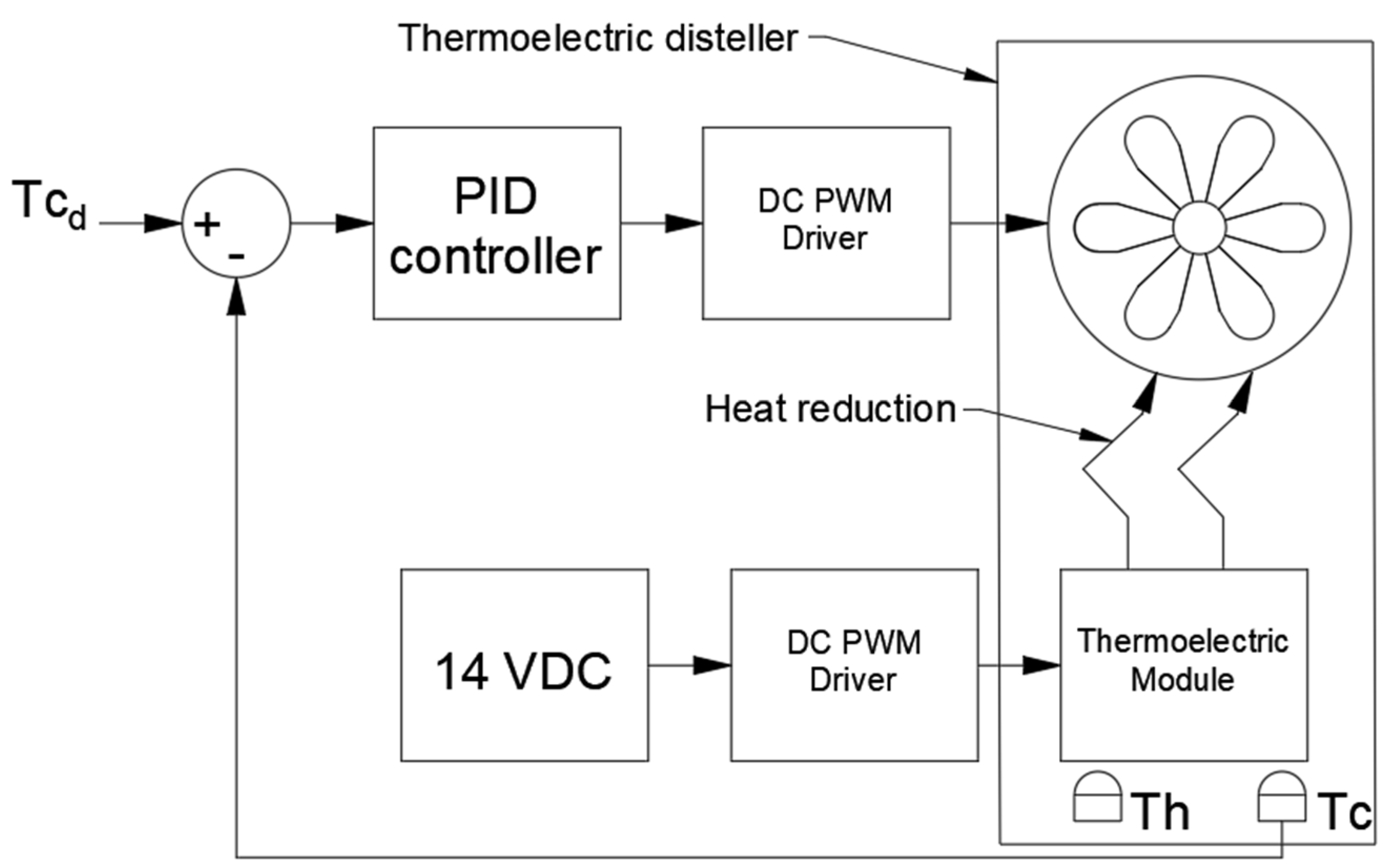
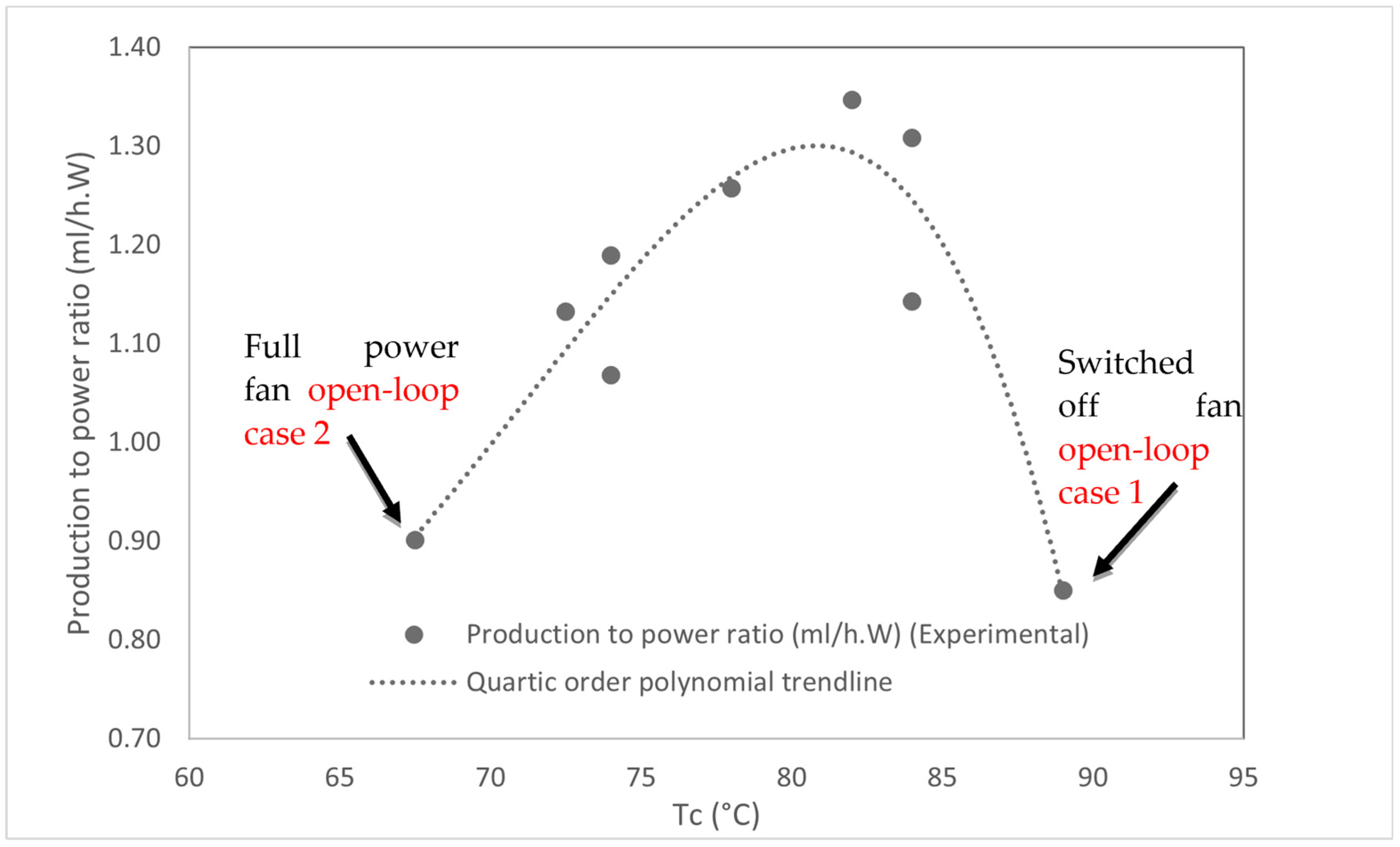
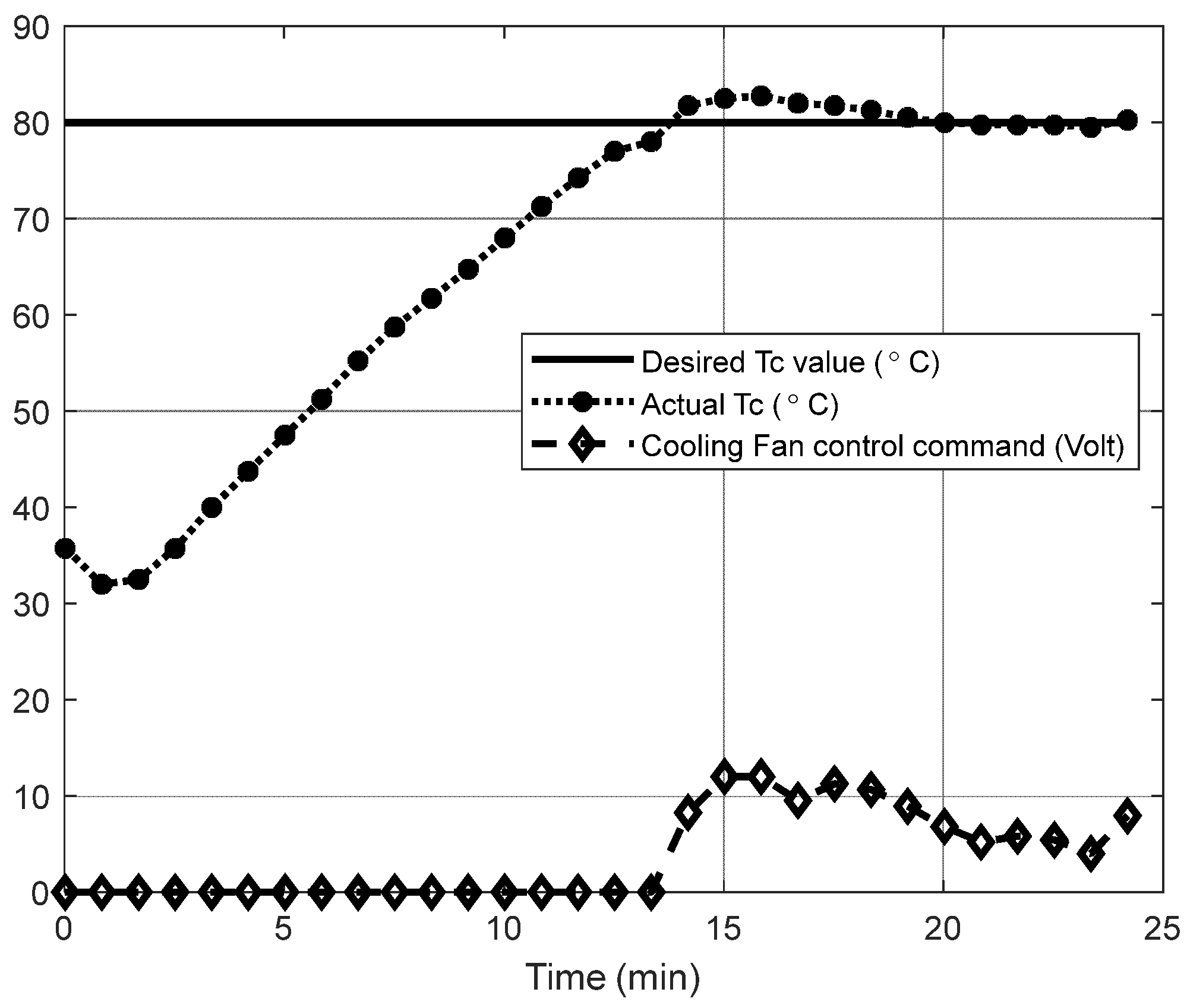
- The second methodology considers the TEM cold side temperature as a feedback signal and the fan input voltage as a control command, while keeping the vent open with constant voltage at the TEM input. The controller’s response is simplified into two steps: 1—TEM cold side temperature increases, and more vapor will be generated in the TEMD. 2—Then the controller will increase the fan speed to condense more vapor and keep the system at a stable operating point, sustaining lower pressure and decreasing the vapor losses. Experimentally the TEM cold side temperature indicates the amount of vapor inside the system. However, the energy harvested from the vapor’s latent heat will decrease if the fan’s rotational speed is increased. A PID controller is implemented with this strategy and compared with the third one. The optimum value of the fan’s rotational speed will be discussed in the results section.
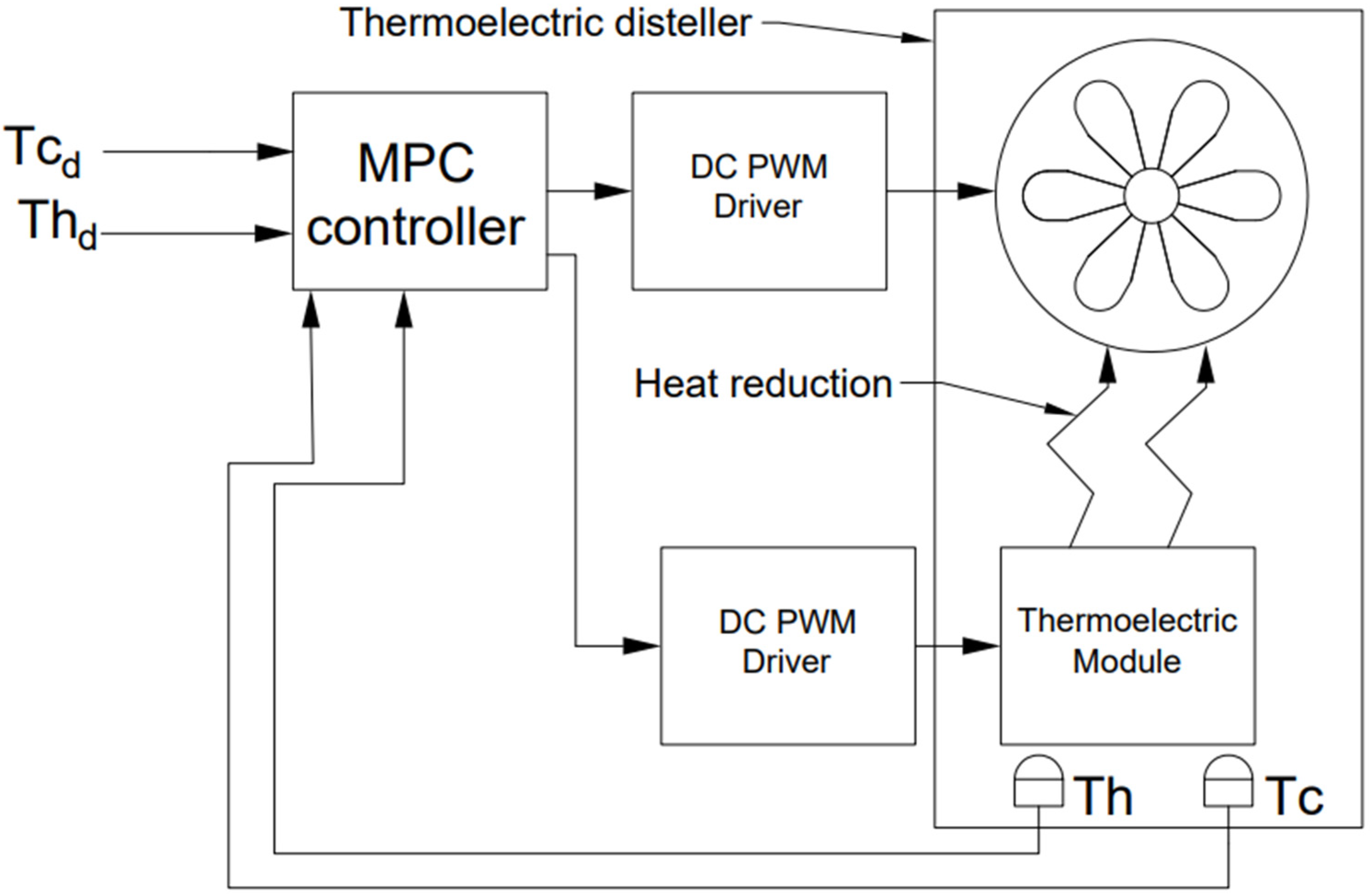
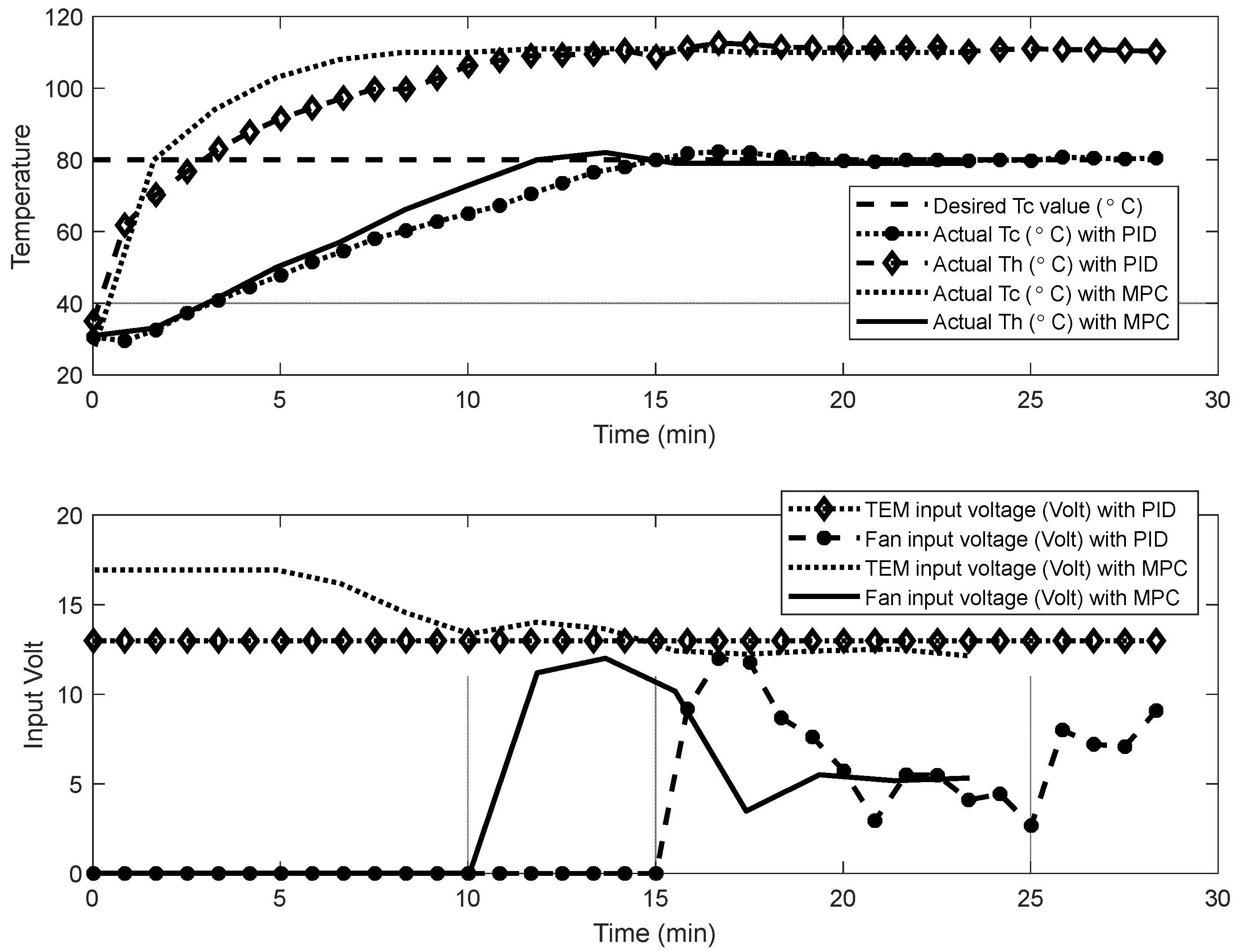
- The third control methodology considers more input signals and , compared with the second strategy, which uses only . The third strategy deals with two control commands: the fan and TEM voltages. So, the system will be a multi-input and multi-output system. The controller will drive the system using a well-known control method called Model Predictive Control (MPC). Using a predefined mathematical model, this method predicts the system’s behavior with the control commands. So, the controller will generate the optimum control commands that perform the best dynamic responses from studying the system’s mathematical model. This third method is implemented and compared with the second control methodology.
3.3. PID and MPC Control System Schematic Diagrams
3.4. System Identification: MPC and PID Controller Tuning
4. Experimental Results
4.1. Open Loop Experimental Results
4.2. Closed Loop Optimum Operating Conditions
4.3. Testing PID Controller
4.4. Comparing PID with MPC Controllers
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Symbol | Description |
| The Seebeck effect coefficient (V/K) | |
| The heat capacity of the water (kJ/(kg·K)) | |
| COPh | Coefficient of performance for heating process in the TEM |
| COPc | Coefficient of performance for cooling process in the TEM |
| Enthalpy of the vapor (kJ/kg) | |
| Enthalpy of the output water at 45 (kJ/kg) | |
| The latent heat of the boiled water (kJ/kg) | |
| Enthalpy of the inlet water at 25 (kJ/kg) | |
| The TEM inlet current. | |
| PID controller proportional gain | |
| PID controller derivative gain | |
| PID controller integral gain | |
| Thermal conductivity of the TEM (W/K) | |
| The mass flow rate of the inlet water. | |
| The mass flow rate of the produced vapor | |
| The mass flow rate of the produced water (condensation) | |
| The total water mass in the hot tank | |
| Vapor loss flow rate outside the tanks from the vent | |
| The number of TEM connected in parallel | |
| The electrical power consumed by the TEMD | |
| Electrical power input to TEMs (W) | |
| Heat flux of the TEM cold side (W) | |
| Heat flux of the TEM hot side (W) | |
| Heat losses from the hot or the cold tank to surroundings | |
| Thermal resistance between the TEM cold side and the vapor (K/W) | |
| Thermal resistance between the TEM hot side and the hot tank water (K/W) | |
| The TEM electrical resistance | |
| The thermal resistance between the system and the environment (K/W) | |
| Hot water density | |
| Condensate water density | |
| TEM hot side temperature | |
| TEM cold side temperature | |
| Temperature of the water in the hot tank | |
| Temperature of the vapor | |
| Temperature of the water in the cold tank | |
| Temperature of the surrounded environment (25 ) | |
| Total dissolved solids | |
| The voltage source value | |
| Condensate water drops covers inside of the cold tank wall. | |
| Hot water volume inside of the hot tank. |
Abbreviations
| Symbol | Description |
| A | Amber |
| Degree Celsius | |
| MPC | Model predictive controller |
| MIMO | Multi-input multi-output system |
| PID | Proportional integral derivative controller |
| PWM | Pulse-width modulation |
| ppm | Part per million |
| TEM | Thermoelectric module |
| TDS | Total dissolved solids |
| TEMD | Thermoelectric module-based distiller |
| VDC | DC voltage |
References
- Abou Assi, R.; Ng, T.F.; Tang, J.R.; Hassan, M.S.; Chan, S.Y. Statistical Analysis of Green Laboratory Practice Survey: Conservation on Non-Distilled Water from Distillation Process. Water 2021, 13, 2018. [Google Scholar] [CrossRef]
- Al-Karaghouli, A.; Kazmerski, L.L. Energy Consumption and Water Production Cost of Conventional and Renewable-Energy-Powered Desalination Processes. Renew. Sustain. Energy Rev. 2013, 24, 343–356. [Google Scholar] [CrossRef]
- Al-Nimr, M.A.; Al-Ammari, W.A. A Novel Hybrid and Interactive Solar System Consists of Stirling Engine vacuum Evaporator thermoelectric Cooler for Electricity Generation and Water Distillation. Renew. Energy 2020, 153, 1053–1066. [Google Scholar] [CrossRef]
- Parsa, S.M.; Rahbar, A.; Koleini, M.H.; Aberoumand, S.; Afrand, M.; Amidpour, M. A Renewable Energy-Driven Thermoelectric-Utilized Solar Still with External Condenser Loaded by Silver/Nanofluid for Simultaneously Water Disinfection and Desalination. Desalination 2020, 480, 114354. [Google Scholar] [CrossRef]
- Das, D.; Bordoloi, U.; Kalita, P.; Boehm, R.; Kamble, A. Solar Still Distillate Enhancement Techniques and Recent Developments. Groundw. Sustain. Dev. 2020, 10, 100360. [Google Scholar] [CrossRef]
- Alwan, N.; Ahmed, A.; Majeed, M.; Shcheklein, S.; Yaqoob, S.; Nayyar, A.; Nam, Y.; Abouhawwash, M. Enhancement of the Evaporation and Condensation Processes of a Solar Still with an Ultrasound Cotton Tent and a Thermoelectric Cooling Chamber. Electronics 2022, 11, 284. [Google Scholar] [CrossRef]
- Al-Nimr, M.A.; Qananba, K.S. A Solar Hybrid Thermoelectric Generator and Distillation System. Int. J. Green Energy 2018, 15, 473–488. [Google Scholar] [CrossRef]
- Stout, B.; Peebles, R. High Temperature Peltier Effect Water Distiller. U.S. Patent 6,893,540, 17 May 2005. [Google Scholar]
- Milton, M. Peltier Effect Concentric Still. U.S. Patent 3,393,130, 16 July 1968. [Google Scholar]
- Trusch, R.B. Thermoelectric Integrated Membrane Evaporation System. U.S. Patent 4,316,774, 23 February 1982. [Google Scholar]
- Samsonov, N.M.; Bobe, L.S.; Rifert, V.G.; Barabash, P.A.; Komolov, V.V.; Margulis, V.I.; Novikov, V.M.; Pinsky, B.Y.; Protasov, N.N.; Rakov, V.V.; et al. System and a Rotary Vacuum Distiller for Water Recovery from Aqueous Solutions, Preferably from Urine Aboard Spacecraft. U.S. Patent 6,258,215, 10 July 2001. [Google Scholar]
- Shoeibi, S.; Rahbar, N.; Esfahlani, A.A.; Kargarsharifabad, H. Application of Simultaneous Thermoelectric Cooling and Heating to Improve the Performance of a Solar Still: An Experimental Study and Exergy Analysis. Appl. Energy 2020, 263, 114581. [Google Scholar] [CrossRef]
- Al-Madhhachi, H. Solar Powered Thermoelectric Distillation System. Ph.D Thesis, Cardiff University, Cardiff, UK, 2017. [Google Scholar]
- Al-Madhhachi, H.; Phillips, M.; Gao, M. Validation of Vapour/Water Production in a Thermoelectric Distillation System; Avestia Publishing: Ottawa, ON, Canada, 2017; p. 117-1. [Google Scholar]
- Nasir, M.T.; Afaneh, D.; Abdallah, S. High Productivity Thermoelectric Based Distiller. Desalination Water Treat. 2020, 206, 125–132. [Google Scholar] [CrossRef]
- Sasongko, S.B.; Sanyoto, G.J.; Buchori, L. Study of Performance: An Improved Distillation Using Thermoelectric Modules. Chem. Eng. Trans. 2021, 89, 649–654. [Google Scholar]
- Khanmohammadi, S.; Chaghakaboodi, H.A.; Musharavati, F. A New Design of Solar Tower System Amplified with a Thermoelectric Unit to Produce Distilled Water and Power. Appl. Therm. Eng. 2021, 197, 117406. [Google Scholar] [CrossRef]
- Snyder, G.J.; Ursell, T.S. Thermoelectric Efficiency and Compatibility. Phys. Rev. Lett. 2003, 91, 148301. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mayne, D.Q.; Rawlings, J.B.; Rao, C.V.; Scokaert, P.O. Constrained Model Predictive Control: Stability and Optimality. Automatica 2000, 36, 789–814. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| TEM PWM Voltage (Volt) | 24VDC Power Supply Current (Amp) | TEM Power (Watt) | TDS (ppm) | Th (°C) | Tc (°C) | Productivity (ml/h) | Production to Power Ratio (ml/(W·h)) | Fan Operation |
|---|---|---|---|---|---|---|---|---|
| (Set Point for Controlled Cases) | ||||||||
| 14.2 | 5.78 | 138.72 | 54 | 110 | 67.5 * | 125 | 0.9 | Full power (open loop case 2) |
| 14 | 5.81 | 139.44 | 62 | 111 | 72.5 | 157.9 | 1.13 | by closed loop feedback controller |
| 14 | 5.85 | 140.4 | 68 | 111 | 74 | 150 | 1.07 | |
| 14 | 5.84 | 140.16 | 70 | 111 | 74 | 166.7 | 1.19 | |
| 14 | 5.85 | 140.4 | 74 | 111.5 | 78 | 176.5 | 1.26 | |
| 14 | 5.8 | 139.2 | 75 | 112.3 | 82 | 187.5 | 1.35 | |
| 14 | 6.08 | 145.92 | 83 | 112 | 84 | 166.7 | 1.14 | |
| 14 | 5.97 | 143.28 | 115 | 111 | 84 | 187.5 | 1.31 | |
| 14 | 5.88 | 141.12 | 180 | 112 | 89 * | 120 | 0.85 | Off (open loop case 1) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nasir, M.T.; Afaneh, D.; Abdallah, S. Design Modifications for a Thermoelectric Distiller with Feedback Control. Energies 2022, 15, 9612. https://doi.org/10.3390/en15249612
Nasir MT, Afaneh D, Abdallah S. Design Modifications for a Thermoelectric Distiller with Feedback Control. Energies. 2022; 15(24):9612. https://doi.org/10.3390/en15249612
Chicago/Turabian StyleNasir, Mohammad Tariq, Diaa Afaneh, and Salah Abdallah. 2022. "Design Modifications for a Thermoelectric Distiller with Feedback Control" Energies 15, no. 24: 9612. https://doi.org/10.3390/en15249612
APA StyleNasir, M. T., Afaneh, D., & Abdallah, S. (2022). Design Modifications for a Thermoelectric Distiller with Feedback Control. Energies, 15(24), 9612. https://doi.org/10.3390/en15249612