
Demagnetization Fault Detection and Location in PMSM Based on Correlation Coefficient of Branch Current Signals


Abstract
:1. Introduction
2. Analysis on Demagnetization Fault in PMSM
2.1. Analysis on Back-EMF in Slot
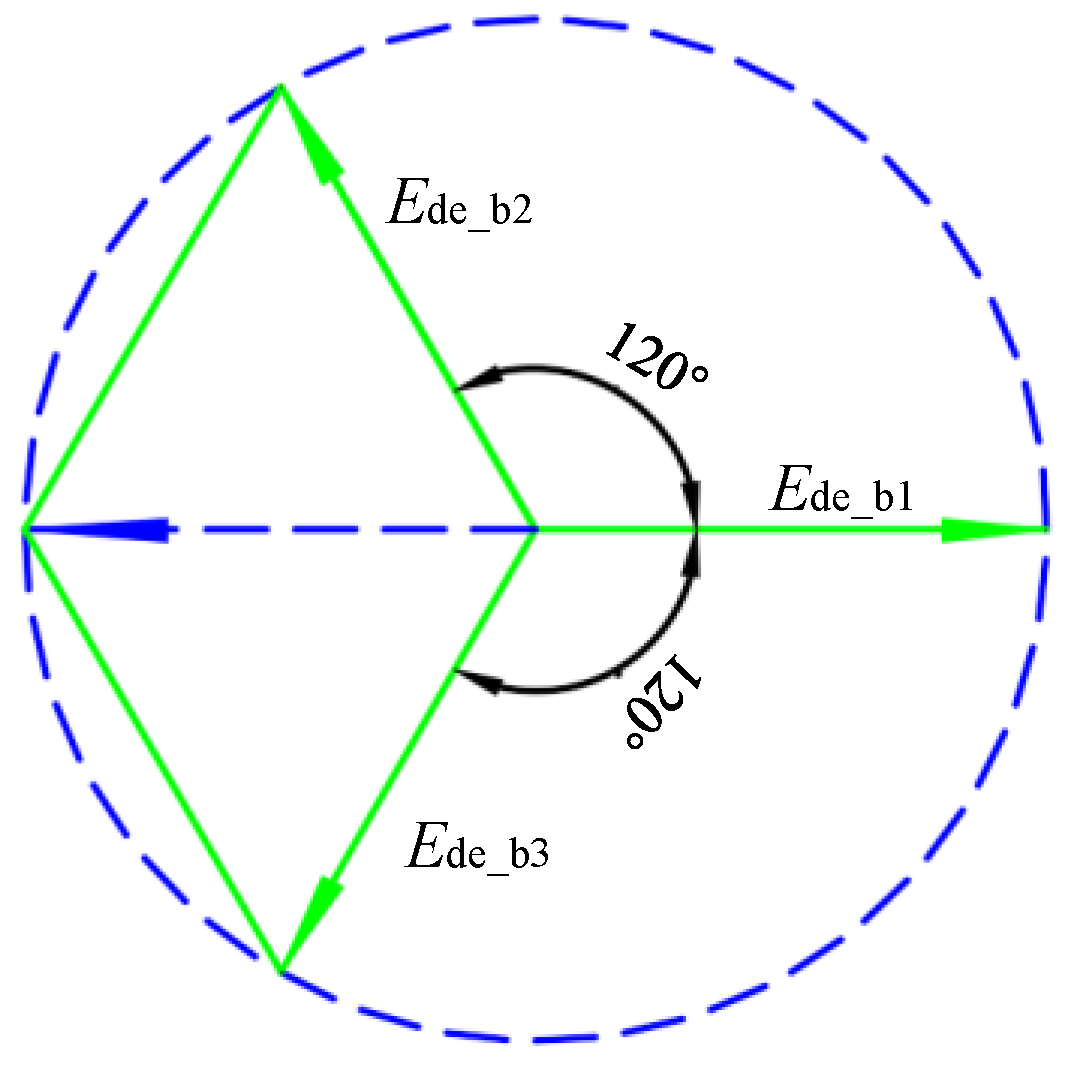
2.2. Analysis on Back-EMF in Branch
2.3. Analysis on Back-EMF in Phase
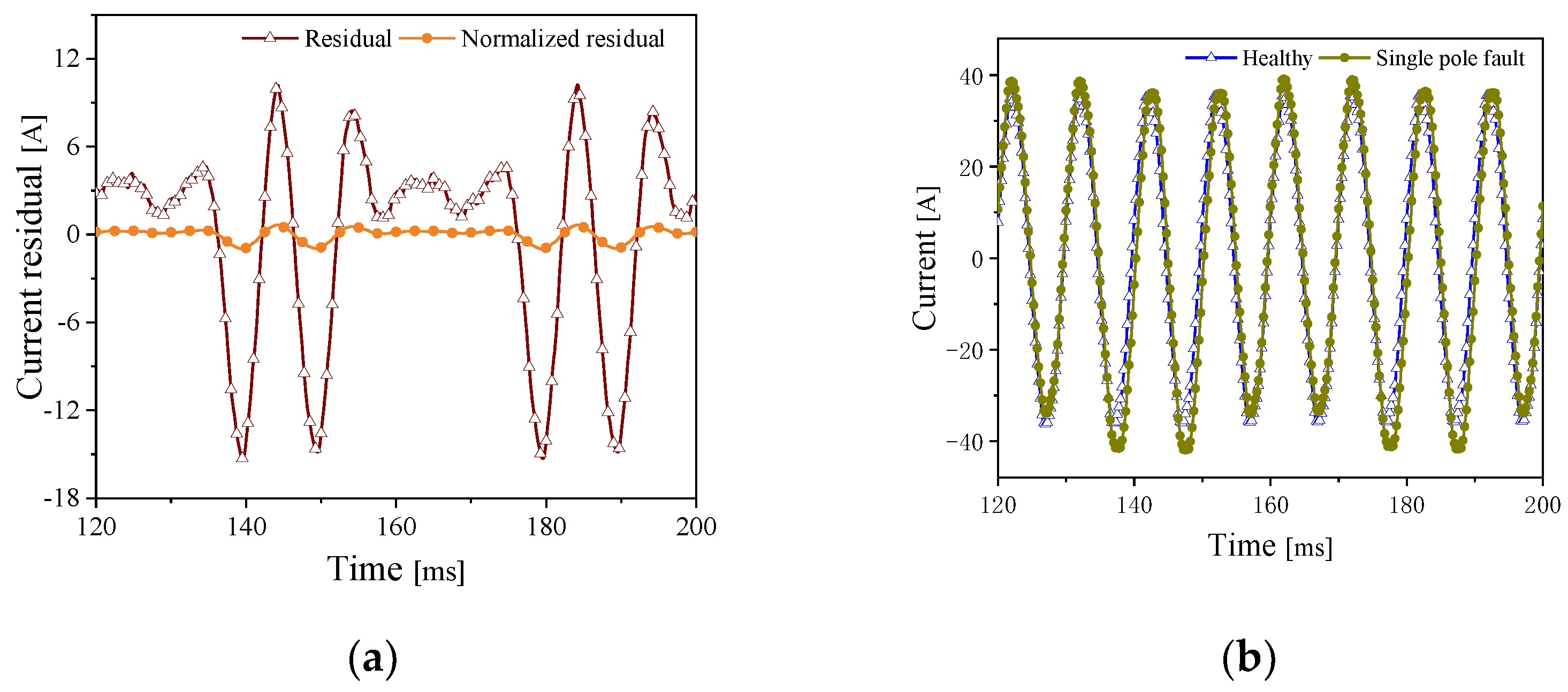
2.4. Analysis on Branch Current
3. Establishment and Application of Sample Database
3.1. Establishment of Sample Database
3.2. Correlation Analysis
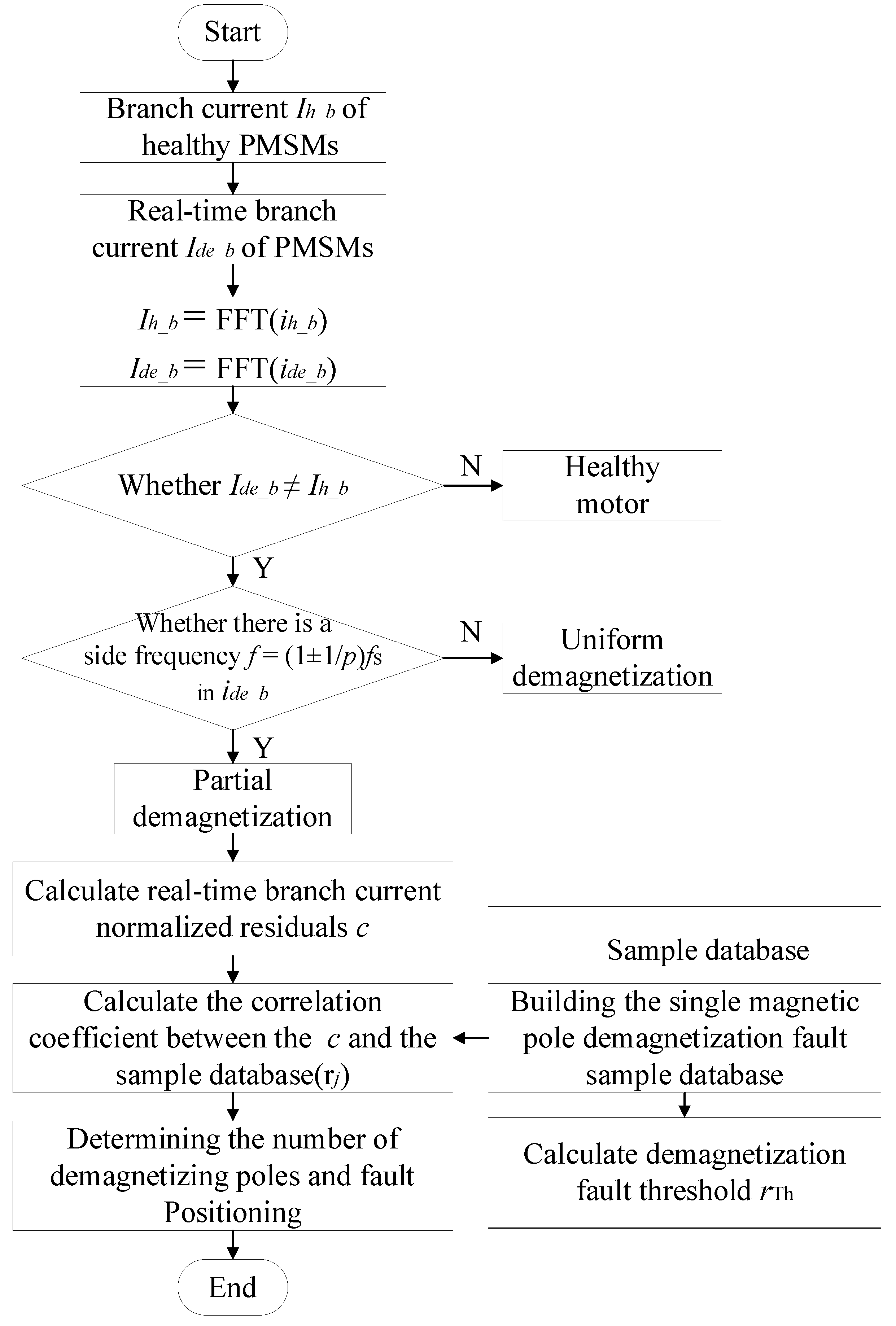
4. Diagnosis and Location of Demagnetization Fault
5. Simulation Analysis
5.1. Structure and Parameters of PMSM
5.2. Diagnosis and Mode Recognition of Demagnetization Fault
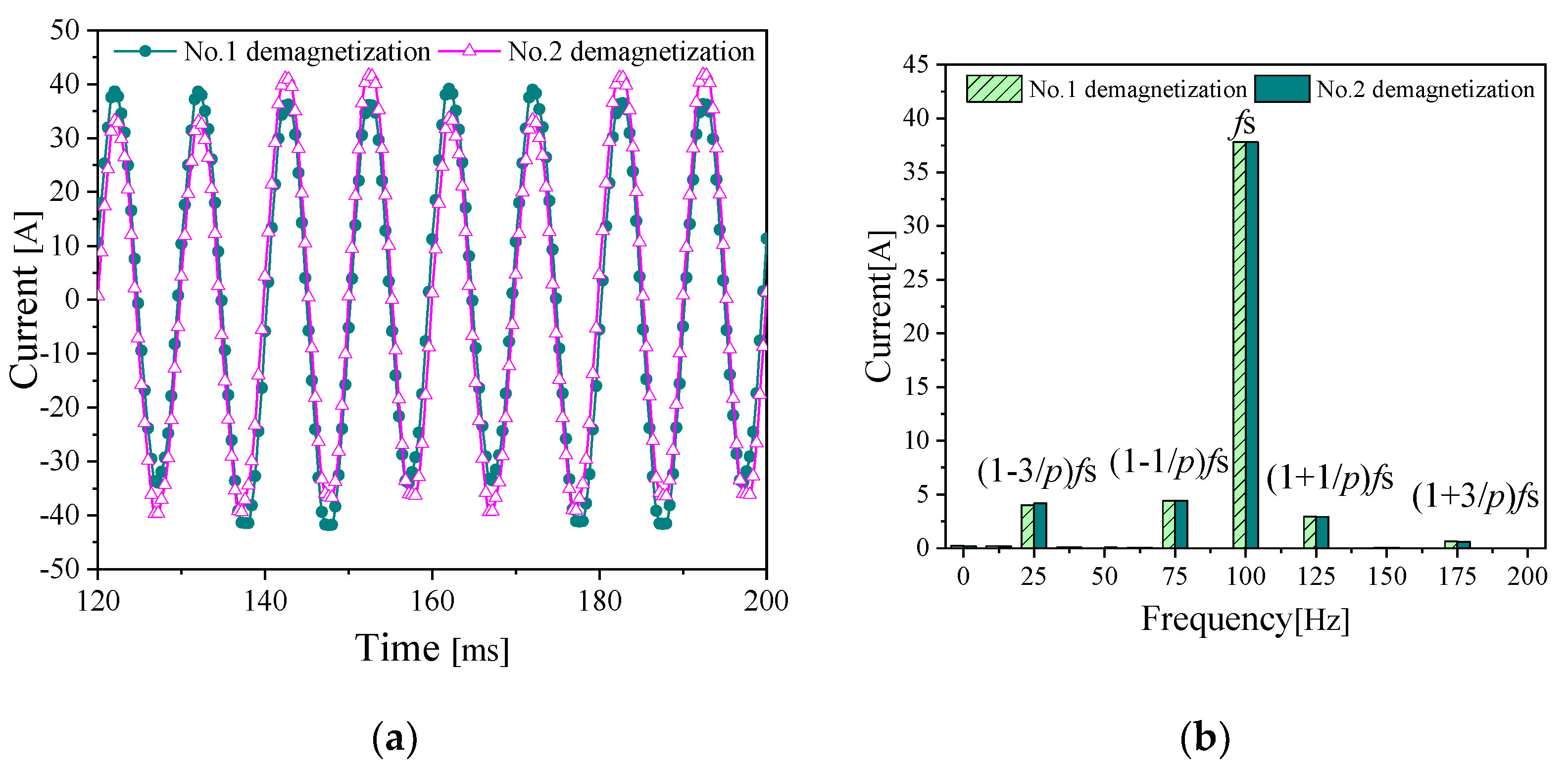
5.3. Determination of the Number and the Location of Demagnetized Permanent Magnet
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Faiz, J.; Mazaheri-Tehrani, E. Demagnetization Modeling and Fault Diagnosing Techniques in Permanent Magnet Machines Under Stationary and Nonstationary Conditions: An Overview. IEEE Trans. Ind. Appl. 2017, 53, 2772–2785. [Google Scholar] [CrossRef]
- Guo, L.L.; Sun, Y.H.; Li, Y.Y.; Dai, L.W.; Jin, N.; Luo, K. Torque predictive control method for PMSM unweighted factor. Acta Energ. Sol. Sin. 2021, 42, 426–433. [Google Scholar]
- Adly, A.A.; Huzayyin, A. The Impact of Demagnetization on the Feasibility of PMSMs in Industry Applications. J. Adv. Res. 2019, 17, 103–108. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Liang, S.; Li, W.; Liang, H. Faults and Diagnosis Methods of PMSMs: A Review. Appl. Sci. 2019, 9, 2116. [Google Scholar] [CrossRef] [Green Version]
- Mazaheri-Tehrani, E.; Faiz, J.; Zafarani, M.; Akin, B. A Fast Phase Variable abc Model of Brushless PM Motors Under Demagnetization Faults. IEEE Trans. Ind. Electron. 2018, 66, 5070–5080. [Google Scholar] [CrossRef]
- Choi, S.; Haque, M.S.; Bin Tarek, T.; Mulpuri, V.; Duan, Y.; Das, S.; Garg, V.; Ionel, D.M.; Masrur, M.A.; Mirafzal, B.; et al. Fault Diagnosis Techniques for Permanent Magnet AC Machine and Drives—A Review of Current State of the Art. IEEE Trans. Transp. Electrif. 2018, 4, 444–463. [Google Scholar] [CrossRef]
- Ebrahimi, B.M.; Faiz, J. Demagnetization Fault Diagnosis in Surface Mounted PMSMs. IEEE Trans. Magn. 2012, 49, 1185–1192. [Google Scholar] [CrossRef]
- Alameh, K.; Cité, N.; Hoblos, G.; Barakat, G. Vibration-Based Fault Diagnosis Approach for Permanent Magnet Synchronous Motors; Elsevier Ltd.: Amsterdam, The Netherlands, 2015; pp. 1444–1450. [Google Scholar]
- Min, Z.; Hu, W.; Kar, N.C. Multi-Sensor Fusion-Based Permanent Magnet Demagnetization Detection in Permanent Magnet Synchronous Machines. IEEE Trans. Magn. 2018, 54, 8110106. [Google Scholar]
- Da, Y.; Shi, X.; Krishnamurthy, M. A New Approach to Fault Diagnostics for Permanent Magnet Synchronous Machines Using Electromagnetic Signature Analysis. IEEE Trans. Power Electron. 2013, 28, 4104–4112. [Google Scholar] [CrossRef]
- Yang, F.; Yang, Y.M. The Diagnosis Method of PMSM Based on Inductive Potential Decomposition. J. New Ind. 2018, 8, 1–10. [Google Scholar]
- Zhu, M.; Hu, W.S.; Kar, N.C. Acoustic Noise-Based Uniform Permanent-Magnet Demagnetization Detection in SPMSM for High-Performance PMSM Drive. IEEE Trans. Transp. Electrif. 2018, 4, 1397–1405. [Google Scholar] [CrossRef]
- Cai, B.; Hao, K.; Wang, Z.; Yang, C.; Kong, X.; Liu, Z.; Ji, R.; Liu, Y. Data-driven early fault diagnostic methodology of PMSM—ScienceDirect. Expert Syst. Appl. 2021, 177, 115000. [Google Scholar] [CrossRef]
- Wang, C.-S.; Kao, I.-H.; Perng, J.-W. Fault Diagnosis and Fault Frequency Determination of PMSM Based on Deep Learning. Sensors 2021, 21, 3608. [Google Scholar] [CrossRef]
- Urresty, J.; Riba, J.; Romeral, L. A Back-emf Based Method to Detect Magnet Failures in PMSMs. IEEE Trans. Magn. 2013, 49, 591–598. [Google Scholar] [CrossRef]
- Urresty, J.; Riba, J.R.; Delgado, M.; Romeral, L. Detection of Demagnetization Faults in Surface-Mounted PMSMs by Means of the Zero-Sequence Voltage Component. IEEE Trans. Energy Convers. 2012, 27, 42–51. [Google Scholar] [CrossRef]
- Urresty, J.C.; Riba, J.R.; Romeral, L. Influence of the Stator Windings Configuration in the Currents and Zero-Sequence Voltage Harmonics in PMSMs With Demagnetization Faults. IEEE Trans. Magn. 2013, 49, 4885–4893. [Google Scholar] [CrossRef]
- Elbouchikhi, E.; Choqueuse, V.; Auger, F.; Benbouzid, M.E.H. Motor Current Signal Analysis Based on a Matched Subspace Detector. IEEE Trans. Instrum. Meas. 2017, 66, 3260–3270. [Google Scholar] [CrossRef] [Green Version]
- Quintal-Palomo, R.E. Analysis of Current Signals in a Partially Demagnetized Vector Controlled Interior Permanent Magnet Generator. Power Electron. Drives 2019, 4, 179–190. [Google Scholar] [CrossRef] [Green Version]
- Chao, W.; Prieto, M.D.; Romeral, L.; Chen, Z.; Blaabjerg, F.; Liu, X. Detection of Partial Demagnetization Fault in PMSMs Operating under Nonstationary Conditions. IEEE Trans. Magn. 2016, 52, 8105804. [Google Scholar]
- Goktas, T.; Zafarani, M.; Akin, B. Discernment of Br-oken Magnet and Static Eccentricity Faults in PMSMs. IEEE Trans. Energy Convers. 2016, 31, 578–587. [Google Scholar] [CrossRef]
- Ruschetti, C.; Verucchi, C.; Bossio, G.; De Angelo, C.; García, G. Rotor demagnetization effects on permanent magnet synchronous machines. Energy Convers. Manag. 2013, 74, 1–8. [Google Scholar] [CrossRef]
- Gyftakis, K.N.; Rasid, S.A.; Skarmoutsos, G.A.; Mueller, M. The Demagnetization Harmonics Generation Mechanism in Permanent Magnet Machines with Concentrated Windings. IEEE Trans. Energy Convers. 2021, 36, 2934–2944. [Google Scholar] [CrossRef]
- Krichen, M.; Elbouchikhi, E.; Naourez, B.; Chaieb, M.; Benbouzid, M.; Neji, R. Motor Current Signature Analysis-Based PMSM Demagnetization Characterization and Detection. Machines 2020, 8, 35. [Google Scholar] [CrossRef]
- Gao, C.; Nie, Y.; Si, J.; Fu, Z.; Feng, H. Mode Recognition and Fault Positioning of Permanent Magnet Demagnetization for PMSM. Energies 2019, 12, 1644. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Rated output power | 28.3 kW | Number of poles (2p) | 8 |
| Rated speed | 1500 r/min | Number of slots (Q) | 48 |
| Rated voltage | 345 V | Number of phase (m) | 3 |
| Length | 200 mm | Parallel branches (a) | 2 |
| Stator outer diameter | 230 mm | Magnet thickness | 4.5 mm |
| Stator inner diameter | 149 mm | Embrace | 0.87 |
| Rotor outer diameter | 147 mm | Magnet type | XG196/96 |
| Rotor inner diameter | 60 mm |
| Sample Characteristic Quantity Numbered | Uniform Demagnetization Fault Degree | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Fault 10% | Fault 20% | Fault 30% | Fault 40% | Fault 50% | Fault 60% | Fault 70% | Fault 80% | Fault 90% | |
| 1 | 0.6965 | 0.6946 | 0.6956 | 0.695 | 0.6962 | 0.695 | 0.6946 | 0.6939 | 0.6927 |
| 2 | 0.6969 | 0.6965 | 0.697 | 0.697 | 0.6967 | 0.6968 | 0.6953 | 0.6959 | 0.6951 |
| 3 | 0.6963 | 0.696 | 0.6962 | 0.696 | 0.6949 | 0.6955 | 0.6951 | 0.6942 | 0.6932 |
| 4 | 0.6973 | 0.696 | 0.6972 | 0.697 | 0.6968 | 0.6967 | 0.6963 | 0.6956 | 0.6943 |
| 5 | 0.6964 | 0.6964 | 0.6964 | 0.6964 | 0.6952 | 0.696 | 0.6957 | 0.695 | 0.6937 |
| 6 | 0.6973 | 0.6959 | 0.6971 | 0.697 | 0.6969 | 0.6964 | 0.6969 | 0.6951 | 0.6934 |
| 7 | 0.695 | 0.6945 | 0.695 | 0.6945 | 0.6958 | 0.6948 | 0.6944 | 0.6938 | 0.6925 |
| 8 | 0.697 | 0.6962 | 0.697 | 0.6969 | 0.6868 | 0.6966 | 0.6962 | 0.6955 | 0.6943 |
| Average | 0.6965 | 0.6958 | 0.6964 | 0.6964 | 0.6962 | 0.696 | 0.6956 | 0.6949 | 0.6937 |
| Sample Database | One-Pole Fault | |||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | |
| 1 | 0.998 | 0.61 | 0.508 | 0.402 | 0.006 | 0.394 | 0.495 | 0.603 |
| 2 | 0.602 | 0.998 | 0.611 | 0.51 | 0.4 | 0.008 | 0.392 | 0.495 |
| 3 | 0.494 | 0.602 | 0.998 | 0.611 | 0.51 | 0.403 | 0.005 | 0.395 |
| 4 | 0.394 | 0.496 | 0.603 | 0.998 | 0.61 | 0.51 | 0.401 | 0.008 |
| 5 | 0.0052 | 0.394 | 0.496 | 0.603 | 0.998 | 0.611 | 0.507 | 0.402 |
| 6 | 0.403 | 0.009 | 0.395 | 0.497 | 0.6 | 0.998 | 0.611 | 0.511 |
| 7 | 0.508 | 0.4 | 0.004 | 0.393 | 0.49 | 0.602 | 0.998 | 0.61 |
| 8 | 0.611 | 0.509 | 0.403 | 0.008 | 0.39 | 0.497 | 0.602 | 0.998 |
| Sample Database | One-Pole Fault | Three-Pole Fault | ||||||
| 5, 6 | 5, 7 | 6, 7 | 5, 8 | 5, 6, 7 | 5, 6, 8 | 5, 7, 8 | 6, 7, 8 | |
| 1 | 0.211 | 0.179 | 0.5 | 0.343 | 0.337 | 0.415 | 0.401 | 0.559 |
| 2 | 0.179 | 0.471 | 0.211 | 0.564 | 0.322 | 0.33 | 0.542 | 0.337 |
| 3 | 0.508 | 0.337 | 0.178 | 0.544 | 0.317 | 0.54 | 0.34 | 0.323 |
| 4 | 0.581 | 0.605 | 0.507 | 0.4 | 0.599 | 0.404 | 0.404 | 0.318 |
| 5 | 0.869 | 0.927 | 0.578 | 0.827 | 0.82 | 0.774 | 0.786 | 0.597 |
| 6 | 0.93 | 0.637 | 0.859 | 0.668 | 0.835 | 0.87 | 0.646 | 0.82 |
| 7 | 0.571 | 0.769 | 0.901 | 0.686 | 0.84 | 0.647 | 0.847 | 0.834 |
| 8 | 0.499 | 0.502 | 0.574 | 0.833 | 0.56 | 0.78 | 0.791 | 0.841 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Y.; Gao, H.; Chen, Q.; Liu, P.; Niu, S. Demagnetization Fault Detection and Location in PMSM Based on Correlation Coefficient of Branch Current Signals. Energies 2022, 15, 2952. https://doi.org/10.3390/en15082952
Yu Y, Gao H, Chen Q, Liu P, Niu S. Demagnetization Fault Detection and Location in PMSM Based on Correlation Coefficient of Branch Current Signals. Energies. 2022; 15(8):2952. https://doi.org/10.3390/en15082952
Chicago/Turabian StyleYu, Yinquan, Haixi Gao, Qiping Chen, Peng Liu, and Shuangxia Niu. 2022. "Demagnetization Fault Detection and Location in PMSM Based on Correlation Coefficient of Branch Current Signals" Energies 15, no. 8: 2952. https://doi.org/10.3390/en15082952
APA StyleYu, Y., Gao, H., Chen, Q., Liu, P., & Niu, S. (2022). Demagnetization Fault Detection and Location in PMSM Based on Correlation Coefficient of Branch Current Signals. Energies, 15(8), 2952. https://doi.org/10.3390/en15082952