2.1. Experimental Testing
In this section, a description of the experimental campaign performed with the ICE is presented. This is a 3-cylinder 999 cm spark ignition engine.
The engine features are summarized in
Table 1.
The measurements were performed on a highly instrumented test bench. The test bench was equipped with state-of-the-art components that allow the operation of the engine in RDE transient conditions [
17]. Several driving cycles, including RDE and the WLTC, were tested in order to assess the impacts of the thermal management on the fuel consumption of a HEV, particularly, to evaluate the improvements achieved with the proposed control strategy. The RDE cycle was carried out in the laboratory with constant temperature and atmospheric pressure. All of the tests and simulations were conducted under those conditions. All of the tests and simulations were conducted at those conditions. Additionally, the experimental campaign performed for this work considered several steady-state running conditions within the engine performance map. The tested conditions were the following:
Sixty-three points from the low load (3 BMEP) to high load (around 22 BMEP) covering a wide range of the engine map at different engine speeds.
The measurements were repeated at different coolant temperatures: 35 °C, 50 °C, 63 °C, 76 °C, and 88 °C.
The test bench was equipped with different measurement tools that were thoroughly calibrated before the measurement campaign. Several temperature-, mass flow-, and pressure sensors were installed in the gas circuit and hydraulic circuits of the engine. All were calibrated and connected to a data acquisition system.
Table 2 summarizes the main instrumentation equipment.
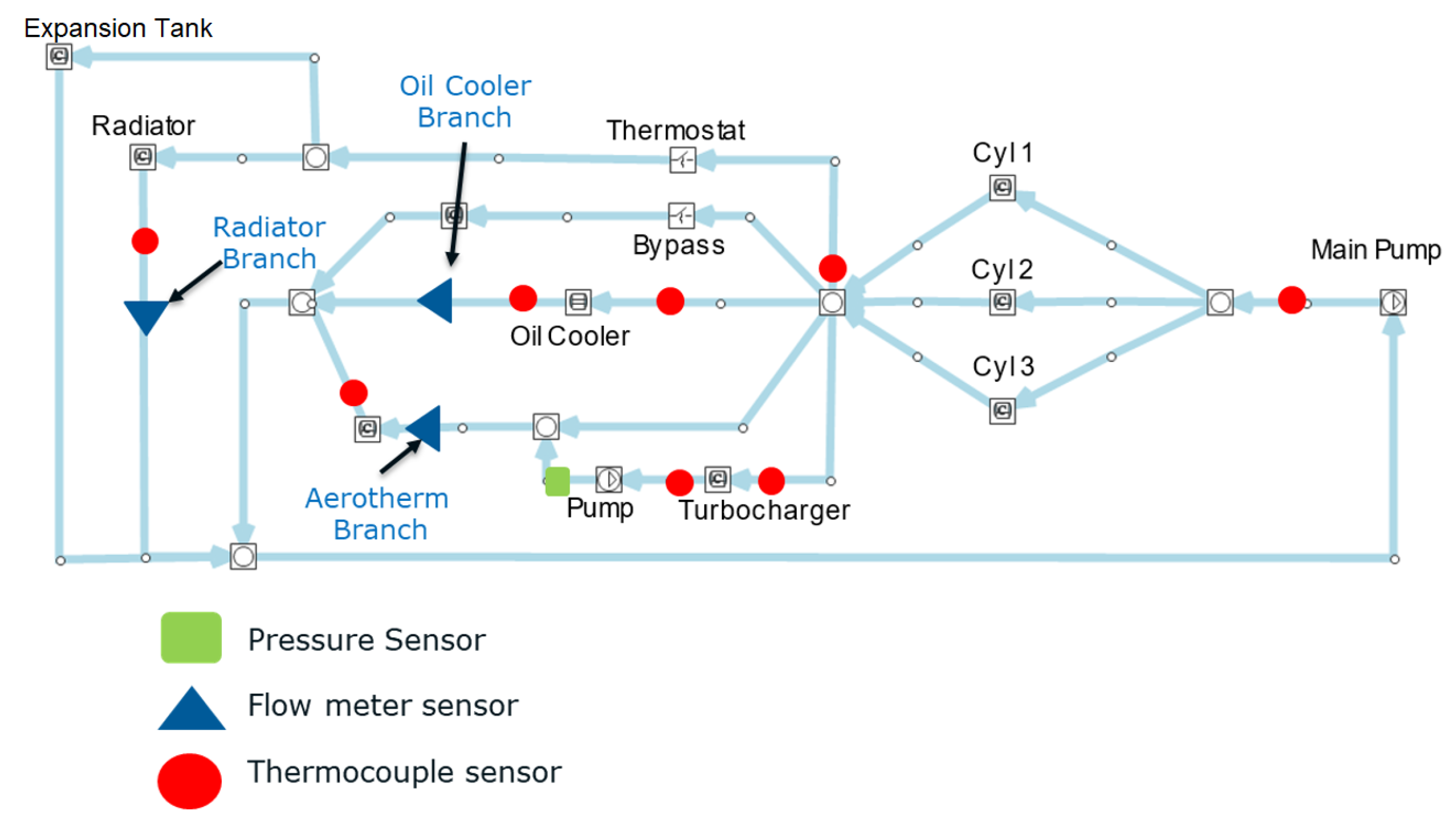
Coolant temperatures were measured at different places of the engine cooling circuit (i.e., before and after the engine, turbocharger, and oil cooler). Coolant flows were measured in three different paths as can be seen in
Figure 1. The oil temperature and pressure were also measured in the oil sump and after the oil cooler, respectively.
2.2. Numerical Model
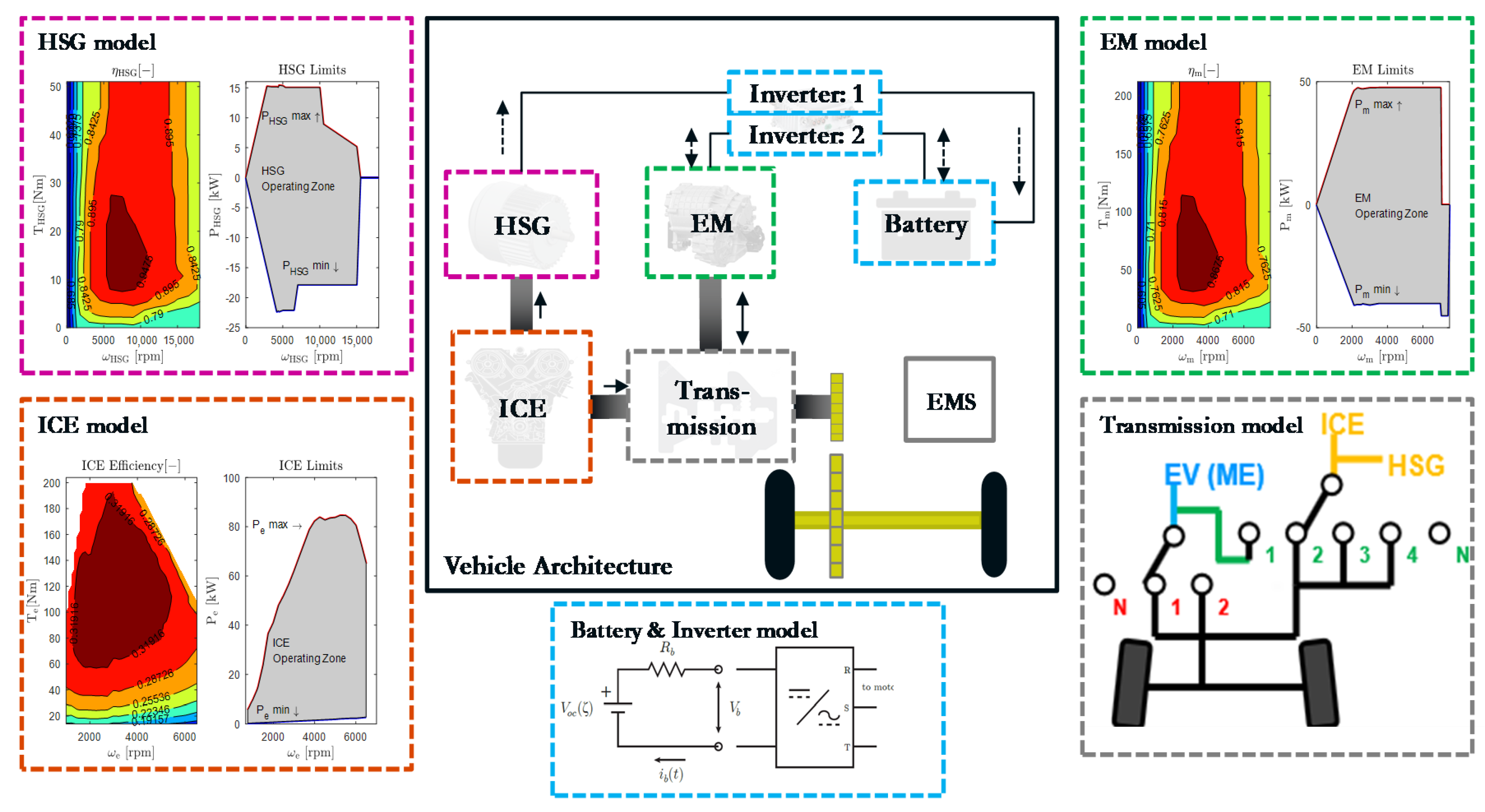
In order to carry out the study, an integrated virtual model in MATLAB–Simulink was developed, including all subsystems of the hybrid propulsive system (i.e., battery, electric drive, ICE, transmission, vehicle, driver…).
Figure 2 shows a schematic view of the hybrid vehicle submodels.
2.2.1. Internal Combustion Engine
Two modeling approaches can be used in the model depending on the purpose. The model implemented in the control strategy, i.e., the one used to make decisions on the power split to minimize fuel consumption, is a simple model based on a quasi-steady approach with an engine map and corrections to consider the engine dynamics and impacts of the factors, such as the thermal state. Note that model simplicity is required in the model-based control since several control decisions must be evaluated at every time-step to choose the optimal one. The model in the plant, which is used to check the impact of the control strategy, may be based on the previous steady-state approach or a detailed model (the 1D-model), which can be embedded by means of an S-function or FMU (functional mock-up unit). The present section is focused on the control-oriented model.
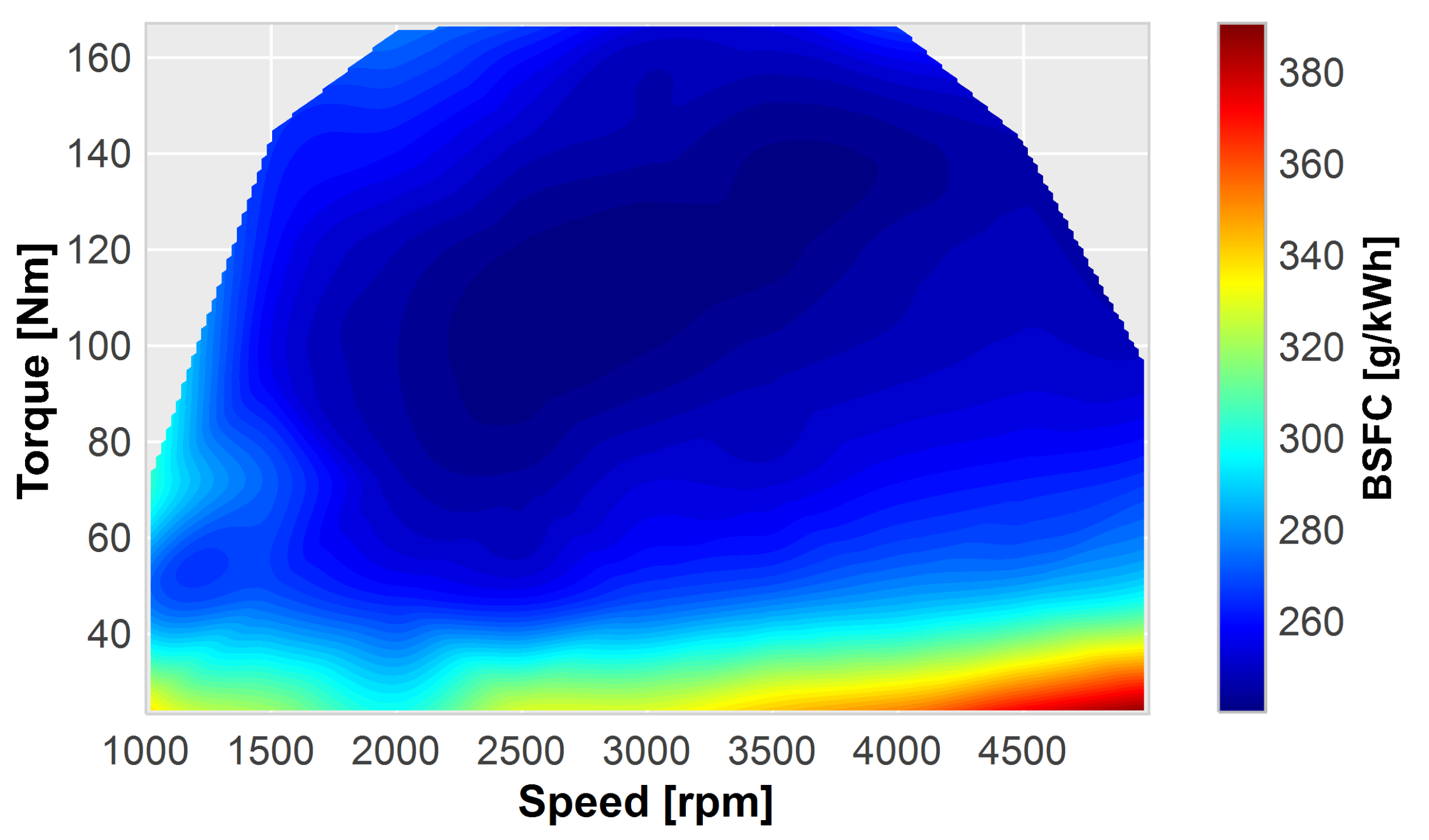
The ICE model follows the classic approach for energy management, consisting of reducing the engine model to a map of any interesting variable, depending on the engine speed and throttle. Among the most interesting variables to map, one can find the torque, fuel consumption, efficiency, or emissions. Regarding the accuracy of this method—modeling complex and dynamic variables, such as emissions, is limited; however, this approach can provide fair enough results in terms of fuel consumption, at least to make control decisions.
Figure 3 shows an example of this map for BSFC in warm conditions in the engine. The data are obtained by sweeping the range of operating conditions in the test bench.
Since maps such as that of
Figure 3 are obtained in steady-state conditions, they cannot capture transient phenomena. One can think of two main transient phenomena affecting ICE. The first one may be a variation of the operating conditions (engine speed and throttle) that will lead to a delayed and filtered response of the torque. The second transient phenomenon strongly affecting the engine performance is the warm-up, since variations in the thermal state of the engine will lead to changes in the heat transfer and friction phenomena, which will finally affect the performance. In this sense, the model employed for control purposes is based on Equations (
1) and (
2):
where
f and
g map the engine speed
and throttle to
the corresponding variable (reference effective torque
, reference fuel consumption
) by means of interpolation in a database. In the case at hand,
f and
g are 2D-lookup tables. The term references in previous variables highlight that those variables have been obtained in a steady state (and warm conditions).
Regarding the impacts of variations in the engine operations, a filter on the reference torque was applied. The filter has the following Equation (
3):
where superscript
k stands for the time-step, parameter
a represents the influence of the torque value in the previous time-step in the current one (state matrix), and
b is the weight of the current reference torque in the actual torque (input matrix). Choosing
and
leads to a filter with the gain equal to one whose time constant increases with
a and the steady state
. The values of
a and
b can be obtained by calibration using the engine transient test and minimizing the error between the measured and model torque. Note that the values of
a and
b will depend on the time step of the simulation. Regarding the impact of the engine’s thermal state on fuel consumption, a lumped heat transfer model was used. In this sense, the thermal state of the engine was approximated by a global temperature (assumed to be that of the coolant
as Equation (
4) shows:
where
and
model the heat transfer between the engine and the environment (so their values depend on the cooling circuit conditions) and
represents the contribution of the energy released in the fuel combustion, which is not transformed in the mechanical power. Constants
,
, and
will, in general, depend on the operating conditions. In the case at hand, they have different values if the engine is on or off, and the temperature is saturated to 100 °C, assuming that the coolant circuit is able to avoid any coolant temperature excursion above that value (
°C).
Once the thermal state is determined by Equation (
4), the reference fuel consumption can be corrected with Equation (
5):
where
is the experimentally calculated ratio (rearranging Equation (
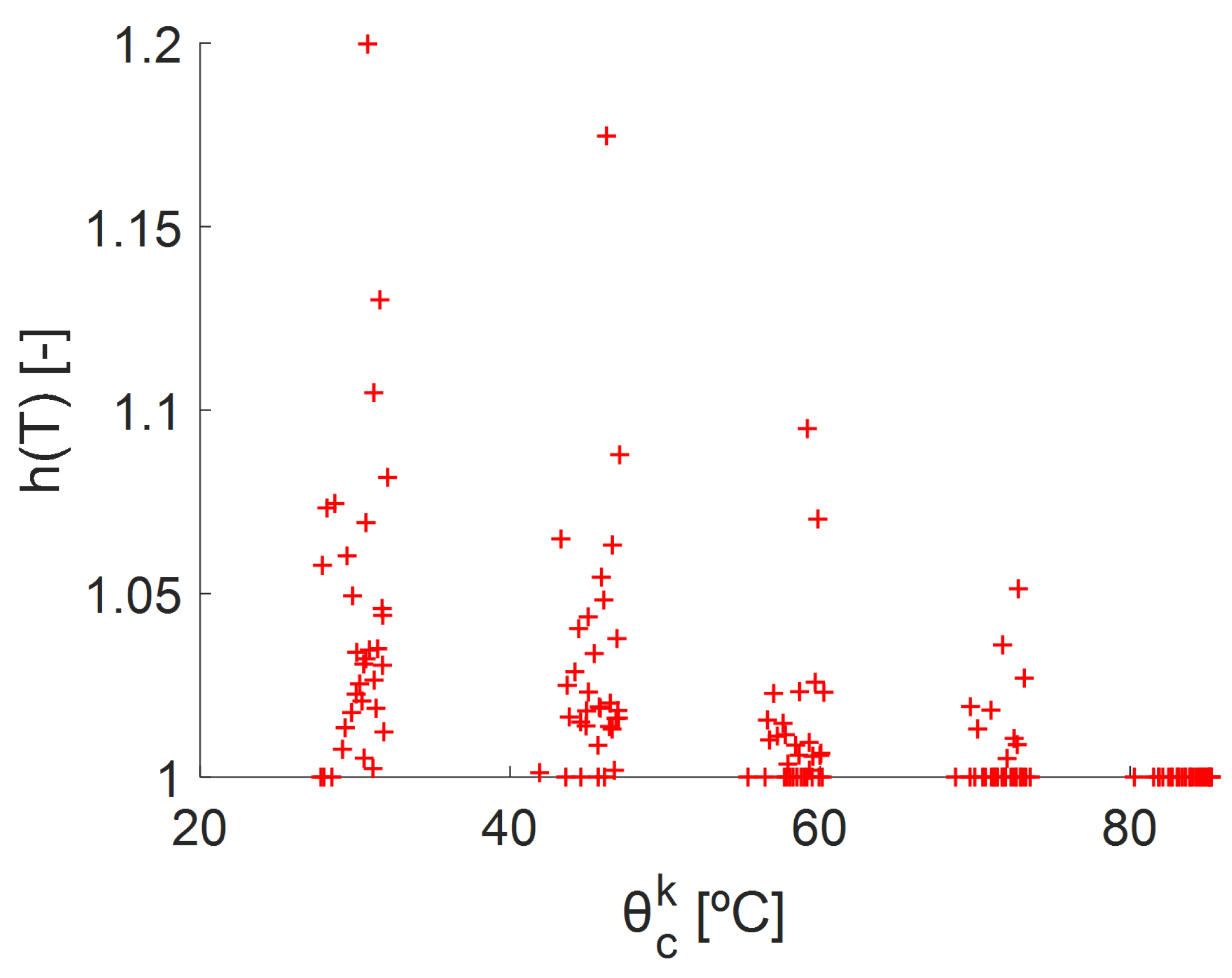
5)) between experimental measurements at different coolant temperatures for each engine operating point. Several steady-state operating conditions were measured at different coolant temperatures (35 °C, 50 °C, 63 °C, 76 °C, and 88 °C). Using these data, the
3D map was generated and implemented in the control model. As can be observed in
Figure 4, the measurements show that operating the engine at a higher temperature has a great impact on fuel savings. For example, operating the ICE at 35 °C could mean a 20% increase in the fuel consumption. Two main reasons explain this fuel consumption increase. On the one hand, lower coolant temperatures of the engine directly mean lower oil temperatures (both the coolant and oil hydraulic circuits are connected by the oil cooler), which increases the friction losses due to higher oil viscosity. On the other hand, lower temperatures in the cylinder block and head increase the temperature drop between the material and the gas, hence, increasing heat transfer and decreasing the combustion efficiency (engine minus the adiabatic).
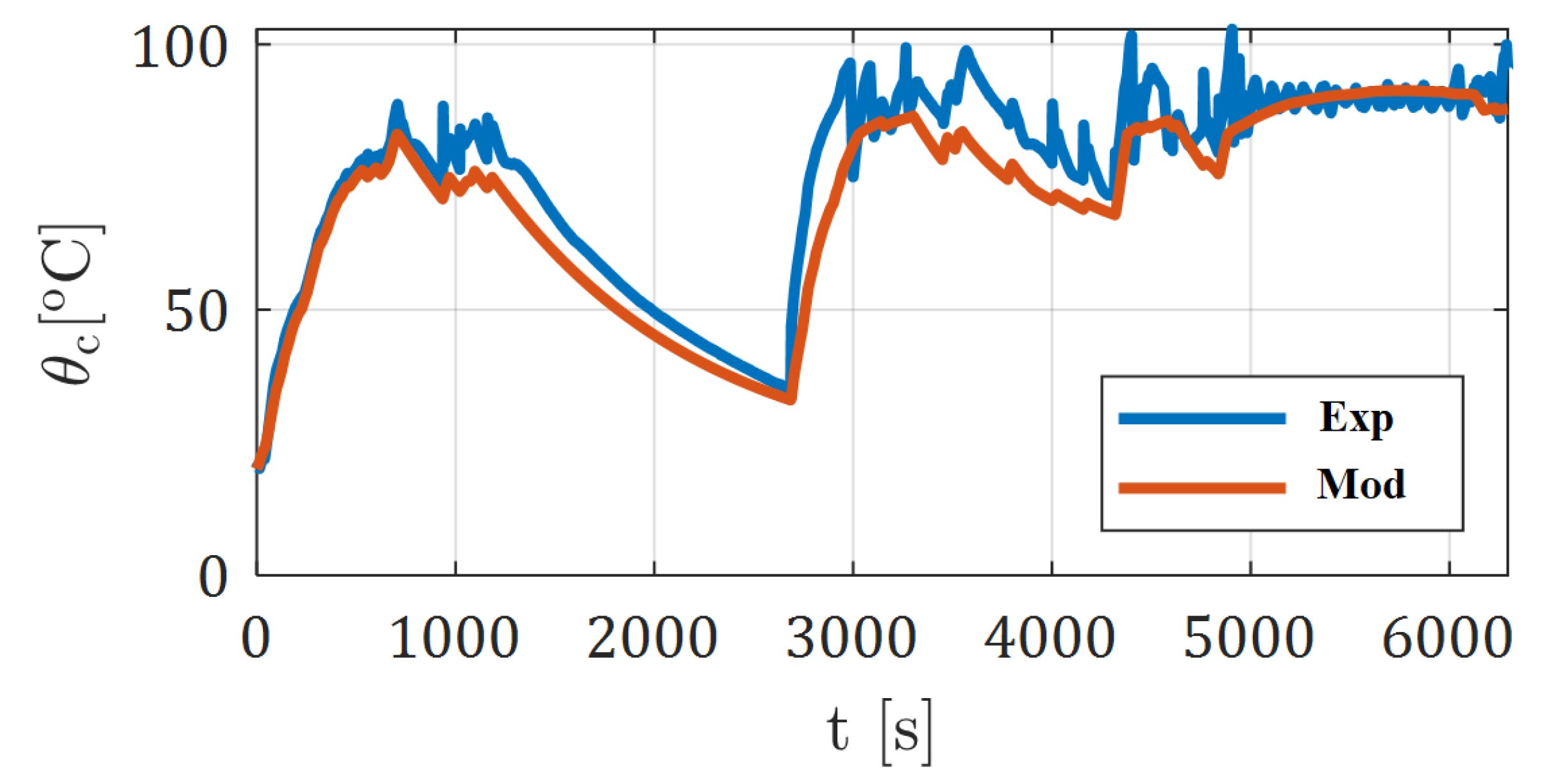
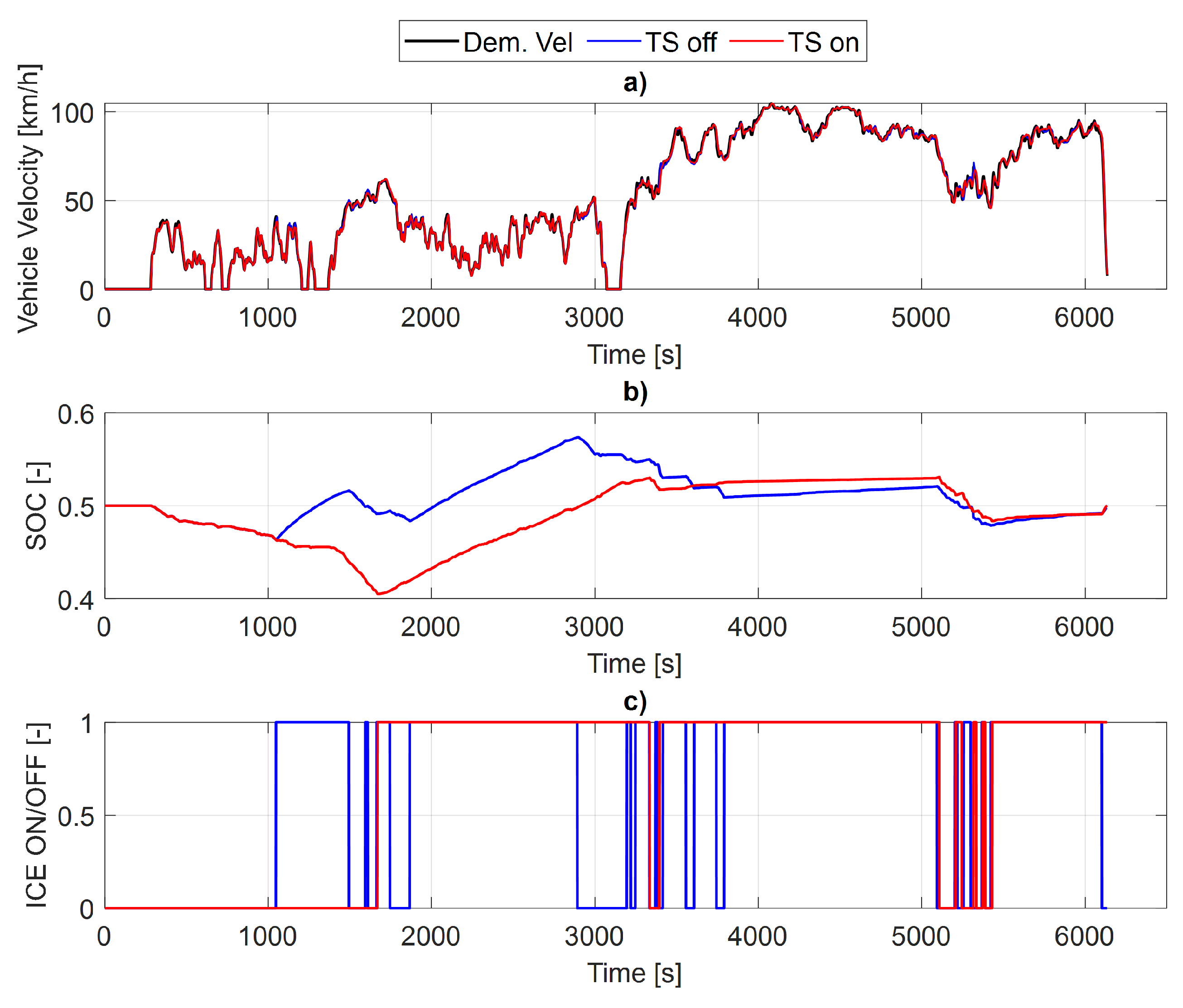
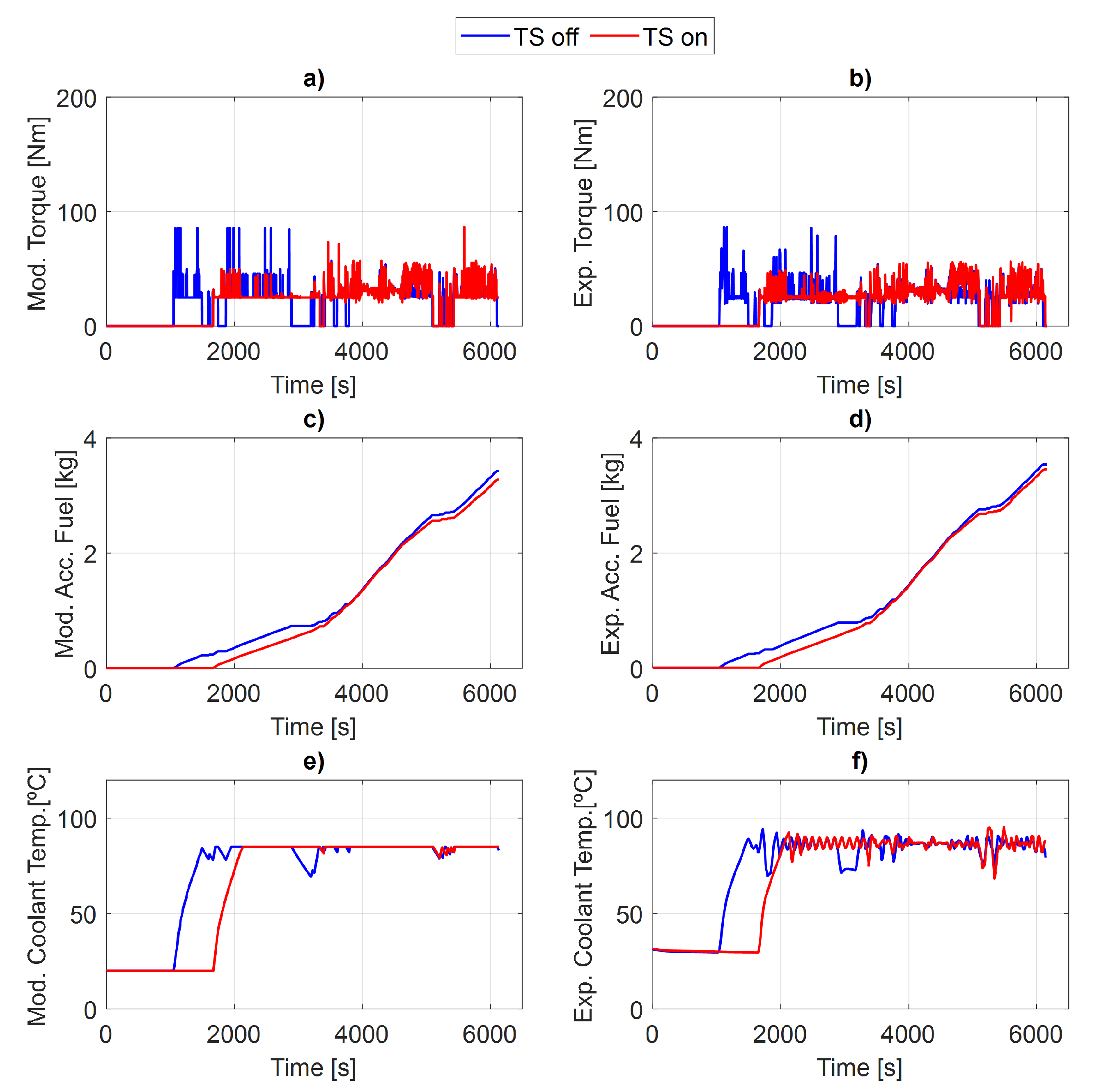
Figure 5 shows the evolution of the coolant temperature in a RDE with the ICE. Results show how despite a simple model, it is able to capture (to some extent) the evolution of the coolant temperature in a dynamic cycle, such as a RDE.
2.2.2. Electric Machine and Power Electronics
The control-oriented model employed in this work considers quasi-steady behavior, i.e., the dynamics of the processes inside the electric motor are much faster than the characteristic times of the driving cycles and the consequent evolution of the main vehicle variables. This hypothesis becomes valid since, in general, the motor response is much faster than the ICE dynamics and strongly simplifies the model since the typical motor map—as supplied by a manufacturer representing the efficiency as a function of the motor speed and torque—can be directly applied. The model assumes that the motor can instantaneously supply the demanded torque if it does not exceed the maximum allowed value that may depend on the motor speed. In this sense, the torque in the motor shaft is calculated according to Equation (
6):
where
is the torque demand and
is the maximum torque that the motor is able to produce or absorb at a certain speed
. Taking into account the efficiency map of the electric machine (
), Equations (
7)–(
9) were used to calculate the electric power consumption of the motor
:
where cases with the motor braking or propelling are distinguished. Note the non-causality of the model since in the actual system, the torque at the motor shaft is a consequence of the supplied electrical power at a particular rotational speed, and the model follows the inverse path (computes the electrical power consumption from the torque and speed). In this sense, the model assumes that all of the torque demanded by the motor is instantaneously supplied (except when the maximum or minimum torques are exceeded). All of the electric machines (motors and generators) are modeled in the same way and the power electronics are modeled as efficiencies, which are included in the map of Equation (
7).
2.2.3. Battery
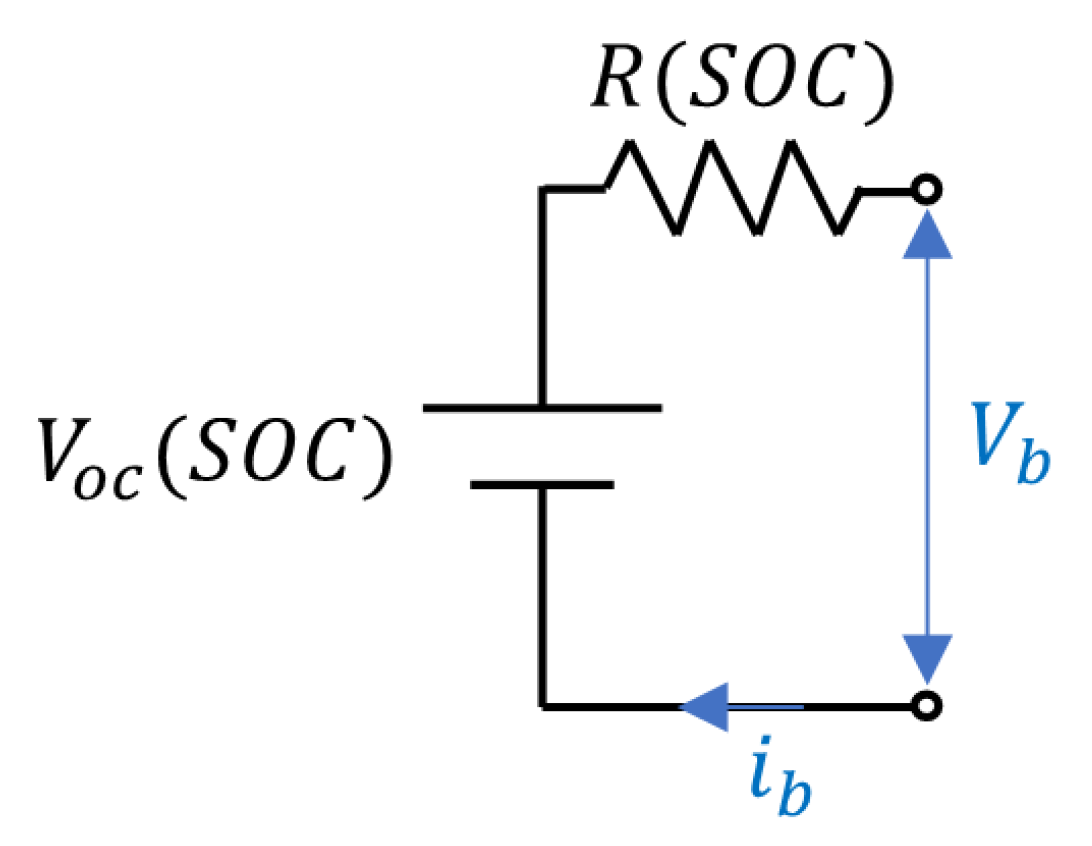
The control-oriented model of the battery used in this work is a Thevenin equivalent circuit consisting of an ideal voltage source and a resistor in the series, as displayed in
Figure 6.
According to the previous circuit, the battery voltages at the terminals follow Equation (
10):
where
represents the current drawn from the battery and the open-circuit voltage (
), and the internal resistance (
R) is the model parameter used to experimentally identify, which may depend on the state of charge of the battery (SOC). Despite the parameter’s identification being outside the scope of the work, the interested reader is referred to [
18] for a detailed explanation of the methods used for parameter identification. The rate of change in the battery charge (
) is the current (Equation (
11)).
where the term
represents a coulombic efficiency, lessening the variation of the battery charge during recharging. From the previous expression, one can compute the battery charge in each time (
t), which can be computed by the current integration according to Equation (
12):
The state of charge of the battery is the variable governing the Thevenin equivalent circuit parameter, and represents the ratio between the battery charge and its maximum value, as seen in Equation (
13).
Provided that the model input is the power demanded by the motor and the output is the
, the circuit in
Figure 6 is solved for the current variable following Equation (
14):
where the power demand of the motor should be replaced by the total power demand of the electric machines if more than one is used (e.g., series HEV).
2.2.4. Transmission
The energy transmission from the engine and motor output to the wheel is done by several clutches and gearing systems whose type and arrangement strongly depend on the powertrain type. In this sense, providing a general model is challenging. The powertrain has some degree of generality since it can operate in series and parallel, so the control-oriented model developed in this activity contains both operation modes.
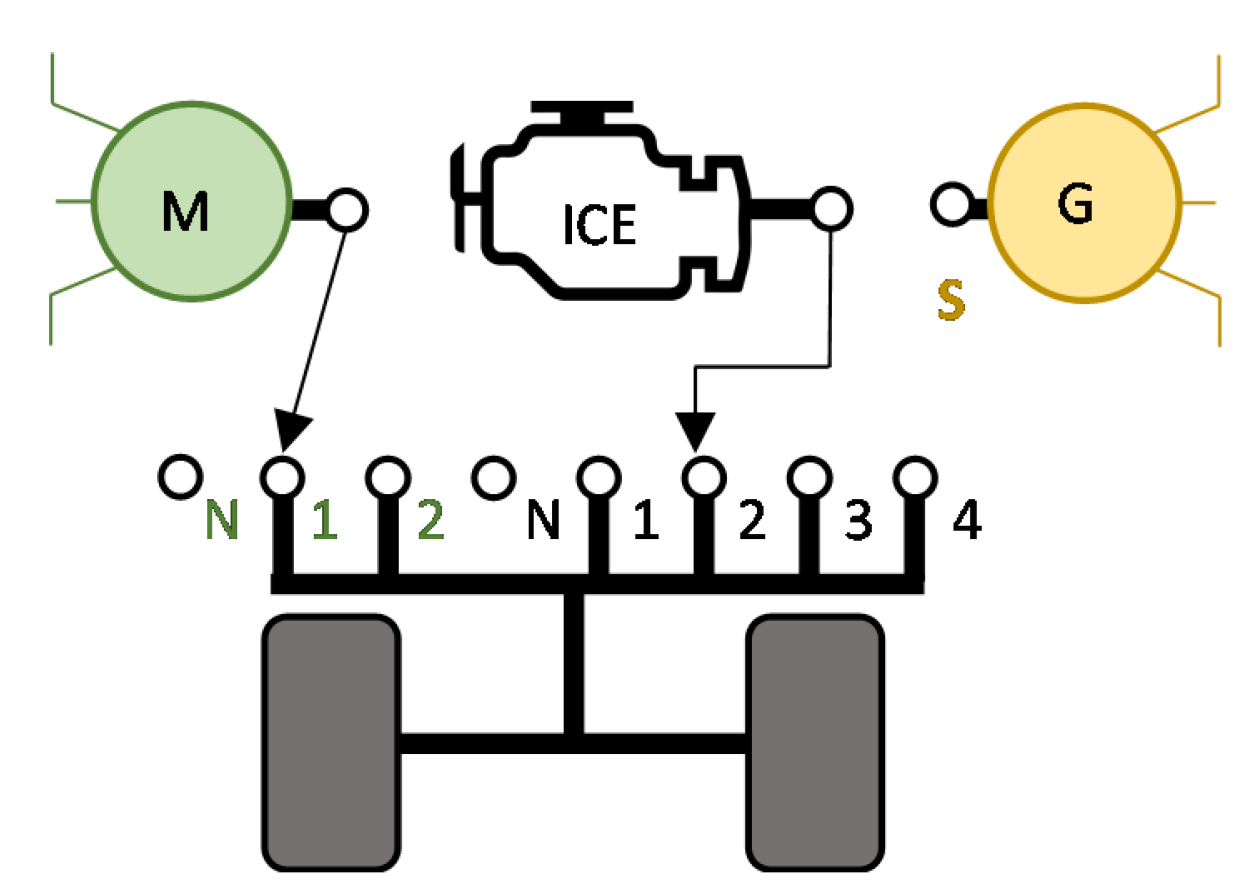
Figure 7 shows the architecture where the vehicle can operate in a pure electric mode by selecting gears 1 or 2 in the motor (M) side and neutral on the engine (ICE) side. It can operate in parallel mode by independently choosing the gears of the motor and engine branches. The system can also operate as an ICE-propelled powertrain by selecting ‘neutral’ for the motor and any of the four available gears for the engine. Finally, the system can operate as a series powertrain where the motor is connected to the wheels through gears 1 or 2 and the engine is connected to the generator (G) through gear S to produce electricity.
The transmission is modeled as a discrete set of gear ratios with fixed efficiency, so the kinematics and energy balance allow computing the speed of the element upstream the transmission, the torque transferred to the transmission output axis from the speed downstream the transmission, and the torque applied to the input axis according to Equations (
15) and (
16):
where
and
are the transmission ratio and efficiency, which depend on the selected gear.
2.2.5. Vehicle Dynamics
The model is based on longitudinal vehicle dynamics and solves the Newton equation at every time step to obtain the vehicle acceleration from the balance between the traction and resistive forces (or torques). In this sense, the main terms participating in the energy balance are:
A source term representing the net torque coming from the powertrain, including the power split, efficiency, and gear transmission ratio. Additionally, the braking torque may be applied if the driver acts on the brake pedal to reduce the vehicle speed and the motor is not able to absorb the braking power.
An inertial term, including the vehicle mass and powertrain inertia.
A set of sink terms considering non-conservative forces, mainly friction losses due to aerodynamic drag and rolling resistance.
An additional term may be included to consider the potential energy, allowing the assessment of the road slope effects (despite tests carried out in the present project have been conducted, considering a horizontal road).
The previous terms can be combined in Newton’s law (in the torque formulation) according to Equation (
17):
where the variables are defined in
Table 3.
Hence, if the total torque applied to the wheel is known (from the application of the engine, motor, and transmission models), Equation (
17) can be solved for the acceleration and the vehicle speed can be calculated by the integration. Therefore, the presented vehicle model can work as a closed-loop system, where the torque is progressively transmitted from the engine and motor to the wheels and then is used to obtain the vehicle speed. Moreover, this vehicle speed is necessary to know the engine and motor operating points in the next step. There is a bidirectional information flow: the torque (M) goes from the engine and motor blocks to the vehicle dynamic block, while speed (n) goes from the vehicle dynamic block to the engine and motor blocks.
Despite the simplicity of Equation (
17), some of the coefficients (e.g., the
in the case of a complex powertrain, such as a HEV) are difficult to find; for this reason, the following expression (Equation (
18)) is used instead:
where parameters
A,
B,
C, and
are experimentally characterized in a coastdown test.
2.2.6. Driver
The objective of the driver model is to follow a given vehicle speed profile as accurately as possible. In this sense, the driver model takes a predefined sequence of vehicle speeds and modifies vehicle actuators (throttle and brake, the gear is automatically selected according to the efficiency criteria by the control strategy) to follow the desired set points. In this sense, the driver model implemented is a proportional–integral (PI) controller acting on a torque demand to cancel the error between the current vehicle speed and a reference.
2.3. Control Strategy
The energy management technique used in the present work was the equivalent consumption minimization strategy (ECMS), which consists of a greedy algorithm based on Pontryagin’s minimum principle (PMP). Provided there is a power demand, a set of candidates are defined (combinations between the different energy sources) to provide this target, and then the option that minimizes a defined cost function in this time-step is chosen. The cost function is a weighted average of the power delivered by the different energy sources (e.g., fuel from a tank and electricity from a battery), while other criteria or constraints can be added to the cost function with the corresponding weighting factor. In this sense, the weighting factors played key roles in the optimization and were properly calibrated. The next sections provide descriptions of the basics of the ECMS and its application in the present work.
Pontryagin’s minimum principle states the necessary conditions for the minimization of a dynamic problem; Equation (
19) shows:
subject to:
and
.
Where
J is a cost function and
f is a generic state function describing the evolution of the system states (
x) with respect to the time (
t) when a series of control actions (
u) and disturbances (
w) are applied. The cost function consists of an integral term defined in
L and a terminal cost (
), which may penalize deviations from a final desired state. One can see that the energy management problem perfectly fits in the framework described by Equation (
19), a transcription can be found in
Table 4.
Considering the Hamiltonian function (H), whose definition is presented in Equation (
20):
where the co-state vector
(with as many elements as states in the problem) is a time varying Lagrangian multiplier aimed to adjoin the system dynamics
f to the cost function. As previously stated, PMP provides the conditions that an optimal solution (
) to the problem in Equation (
18) should fulfill:
The optimal solution to the problem described in Equation (
19) should minimize the Hamiltonian (Equation
20) in every time step according to Equation (
21):
The optimal solution to the problem described in Equation (
19) should lead to Equation (
22):
The evolution of the co-state for the optimal solution should fulfill Equation (
23):
The terminal co-state should be Equation (
24):
For the case of energy management, Equations (
21) and (
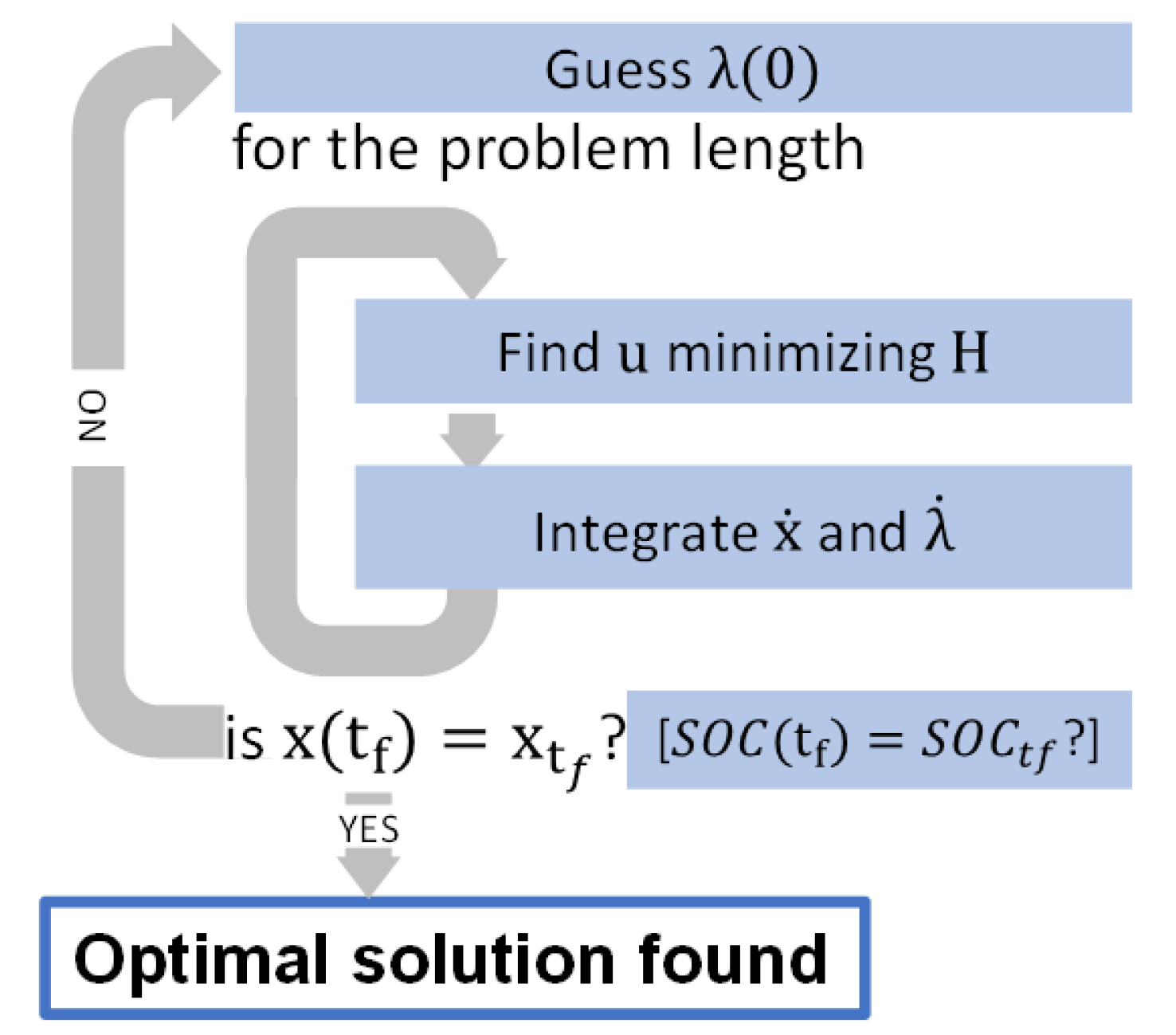
23) allow calculating the solution to the problem if a solution exists and is unique. In particular, the algorithm used in this project is based on a shooting method with the following steps:
Assign the initial values of the states to the optimal state trajectory ().
Estimate an initial value for the co-state vector ().
Compute the optimal control action (
) at the current time-step by applying Equation (
21) by trying a set of candidates.
Compute the state derivative and integrate to obtain state x in the next time-step.
Compute the co-state derivative by Equation (
23) and integrate to obtain the co-state vector
in the next time-step.
Repeat steps 3–5 until the end of the problem.
If the target state at the end of the problem is achieved (), is a good guess, otherwise modify and repeat steps 3–6.
Figure 8 shows a scheme of the solution algorithm explained in points 1–7.
An important issue for numerically solving the PMP is that the ordinary differential equations for the co-state integration are generally ill-conditioned and lead
to blows, even with tight tolerances. In the HEV cases, the following simplification is usually considered to avoid co-state integration. Consider that the Lagrangian cost is the fuel consumption (
) and the state of the problem is the battery state of charge (
). Then, from Equation (
23), Equation (
25) is obtained:
where the first term on the right side is clearly 0, since the fuel consumption depends on the engine speed and throttle (that also depend on the power split) but does not depend explicitly on the SOC. The second term represents how the battery behavior depends on the SOC, so if the battery parameters (
R,
) do not depend on the SOC, the second term will also be 0,
will be constant, and the co-state integration can be avoided. This simplification is usually considered since it strongly simplifies the online implementation. Note that, provided a constant
, the Hamiltonian can be interpreted as an equivalent fuel consumption that includes both the fuel and the weighted battery power. This is the basis of ECMS, which, provided an equivalence factor (
s), chooses the control candidate that minimizes at every time step a weighted average of the fuel consumption and battery power (
) according to Equation (
26):
Note the similarity between Equations (
21) and (
26). In the same way with PMP, a shooting method is required to find the proper value of
s. As
s approaches 0, the use of the battery becomes cheaper, which leads to lower fuel consumption and battery depletion; on the contrary, an excessively high value of
s will lead to battery overloading and high fuel consumption. A target SOC at the end of the cycle (usually equal to the initial values in HEVs and the minimum allowed SOC in the case of PHEVS) provides the closing condition for the shooting method. As the proper value of
s depends on the driving cycle, the shooting method requires several runs of the driving cycle to find the proper value, which is only possible for offline optimization. For online implementation, since the optimal value of
s is unknown a priori, its value would be online-adapted according to the differences between the measured and the target SOC, usually with a PID.
2.3.1. Modifications to Deal with Oscillating Behavior
In order to make the proposed control strategy more robust, general, and able to deal with xEVs having different possible modes (e.g., series, parallel), considering other system states (i.e., the engine coolant temperature), some modifications were introduced.
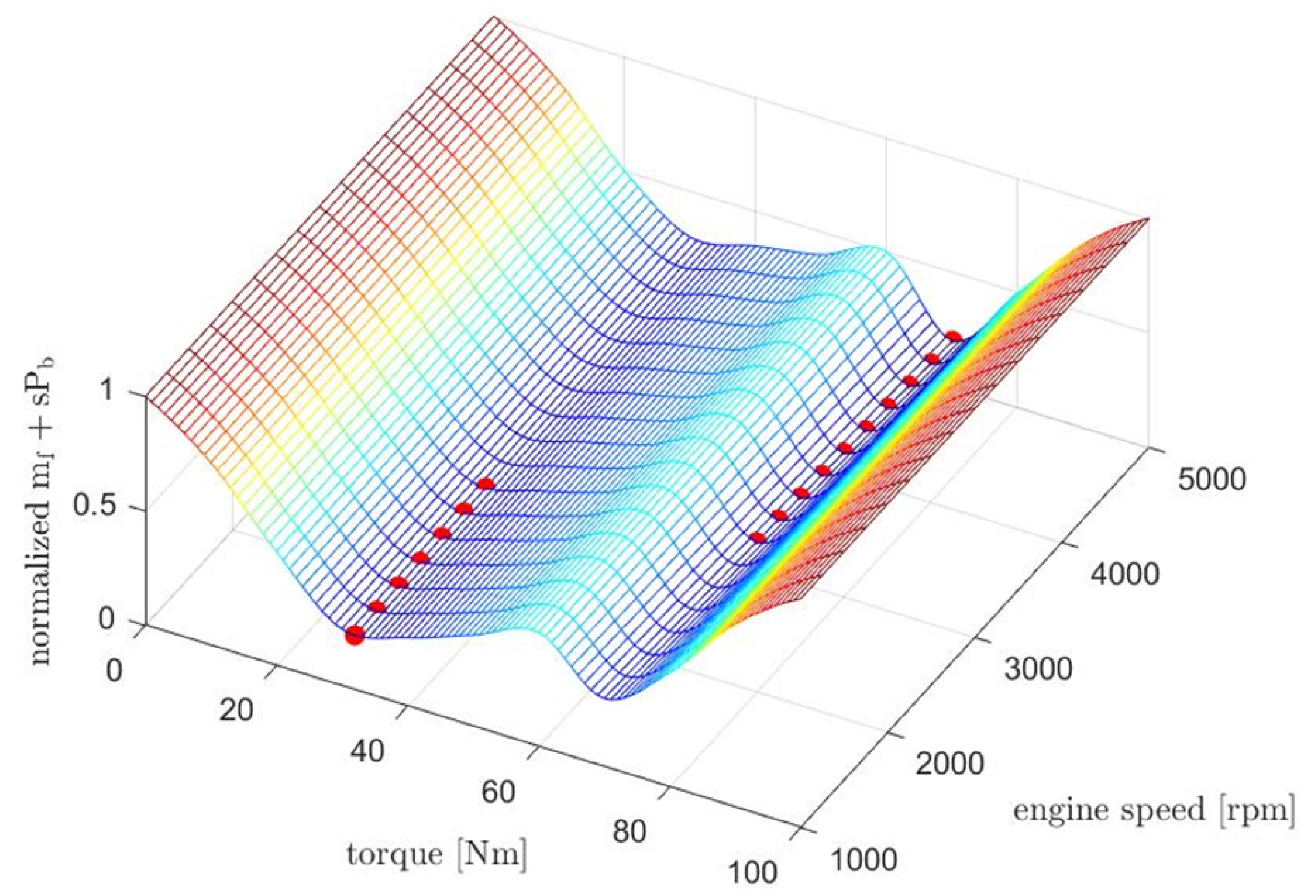
Under certain circumstances, the direct application of Equation (
26) can produce policies resulting in poor drivability or even undesired behaviors due to the potentially abrupt transitions between the torque requests. As the ECMS is a greedy algorithm, i.e., minimizes the cost function at each stage without considering future consequences of the current choice, two consecutive ECMS functions can have completely different local minima, leading to completely different control actions, e.g., engine torque demands. Note that abrupt changes in the control actions will lead to transient processes in the actual plant that are not considered by the model, so the real behavior can deviate from the expected one. This situation usually happens when Equation (
26) is non-convex and two local minima can be near in terms of engine speed but far in terms of torque. A conceptual example is provided in
Figure 9 where Equation (
26) is plotted for different engine torque demands (i.e., control decisions) and engine speed (problem disturbance). It may be observed that the surface has two local minima, and that for close values of engine speeds around 2000 rpm, the minimum jumps abruptly from 40 to 80 Nm. So, eventually, if the vehicle speed varies in a way that the engine speed is around 2000 rpm, the demanded torque will continuously oscillate between 40 and 80 Nm, which, despite being optimal for the model, is probably far from the minimum fuel consumption and acceptable drivability in the actual powertrain.
To cope with this undesired behavior, the following modification of Equation (
26) was implemented as observed in Equation (
27):
where the optimal control at time-step
k (
) is calculated by adjoining the costs for different terms:
is the direct application of the ECMS, with the particularity that fuel power (, where is the fuel heating power) instead of the fuel mass flow is used to allow the s parameter to be non-dimensional.
represents the marginal cost of switching on the engine.
is the marginal cost associated with the engine throttle variation.
is an arbitrarily large cost to avoid throttle variations above a certain threshold () or, in the case of the series mode where the engine is decoupled from the wheels, with the engine speed variations above a given limit ().
Note that , , , , and are calibration parameters that will depend on the problem addressed.
2.3.2. ECMS Modifications to Deal with the Engine’s Thermal State
It has been proven in the literature that the engine’s thermal state plays a major role in its performance [
19]. In this sense, provided that the engine efficiency (and potentially emissions) are strongly affected by the engine’s thermal state, the impact of including this variable in the energy management strategy was evaluated.
Considering that the actual engine behaves as the complete model presented in
Section 2.2.1, including the lumped-heat transfer model of Equation (
4) and its impact on fuel consumption represented by
Figure 4. The coolant temperature becomes an additional state of the problem since the past decisions of the maps (engine torque demand, so fuel injection) on future revenues and costs (fuel savings because the engine is warmed up or fuel penalties if the engine is cold due to the lack of operation in previous time-steps). In this sense, the Hamiltonian presented in Equation (
20) (or the ECMS cost function in Equation (
26)) should be upgraded with an additional state. Accordingly, for this case, Equation (
20) was modified into Equation (
28):
where
is the variation of the Energy stored in the battery,
is the variation of the coolant temperature,
is the fuel consumption, and
and
are the co-states associated with the battery and coolant. Note that multiplying the fuel consumption by the fuel heating power and the engine temperature by an equivalent thermal capacity of the cooling circuit allows using non-dimensional co-states and power units for
H as presented in Equation (
29):
where
is the rate of reduction in the energy in the fuel tank,
is the rate of reduction in the energy stored in the battery, and
is the reduction in the energy stored in the engine’s thermal state (
). It can be observed that there is some intuition beyond the application of PMP in Equation (
29) since H represents the rate of reduction in the energy stored (in any form) in the powertrain, and the co-states
represent the marginal costs of the battery and thermal state. In this sense, minimizing Equation (
29) implies that the energy stored in the powertrain is maximized.
Recalling Equation (
23) for the co-state associated with the engine’s thermal state, the Equation (
30) is obtained:
where the fuel heating power and the coolant circuit thermal capacity are assumed constants and the battery efficiency is considered independent of the engine coolant temperature. A simple look at Equation (
30) shows that
will evolve during the driving cycle since the first term is different from 0 (at least during the warm-up) due to the coolant temperature’s effect on engine efficiency and fuel consumption, and the second term will also be different from 0 since the heat transfer in the cooling circuit depends on the coolant temperature (see Equation (
4)). In this sense, the ECMS approach considered for the battery (constant
) cannot be considered for the coolant temperature and
is not constant. Further analysis of Equation (
30) shows that the first term on the right side will be non-negative (
) since reducing the coolant temperature involves an increase in the fuel consumption (reduction in efficiency), and the term multiplying the co-state is non-positive (
) since increasing the coolant temperature will lead to lower heat coming from the combustion, the process (higher efficiency) and higher heat transfer with the environment. Provided that, in principle, there is no constraint on the terminal state of the coolant temperature, the application of Equation (
24) leads to
. Hence,
should be a value leading to
after integration of Equation (
30) during the driving cycle. For the control-oriented model considered in the present project, combining Equation (
30) with Equations (
2) and (
4) with the 3D map presented in
Figure 4 leads to Equation (
31):
which can be integrated to compute the evolution of
. Therefore, considering the engine’s thermal state leads to the initial value problem, with two initial values to determine:
s (provided constant
) and
. Both values can be obtained by a shooting method until the desired final
and
are reached. In practical cases, due to the complexity of numerically integrating Equation (
30), it is difficult to reach
and the value of
is chosen in a way that minimizes fuel consumption. A similar approach to that followed in this model can be found in [
16].
2.3.3. ECMS Modifications to Account for Different Powertrain Modes
The ECMS is prepared to work with series and parallel architectures with different gear ratios. To this aim, several optimizations are running at the same time that provide the optimal control outputs (demanded torques for the ICE and electric machines) and the associated cost of every mode. Then in a second optimization stage, the best option amongst the available modes is selected.
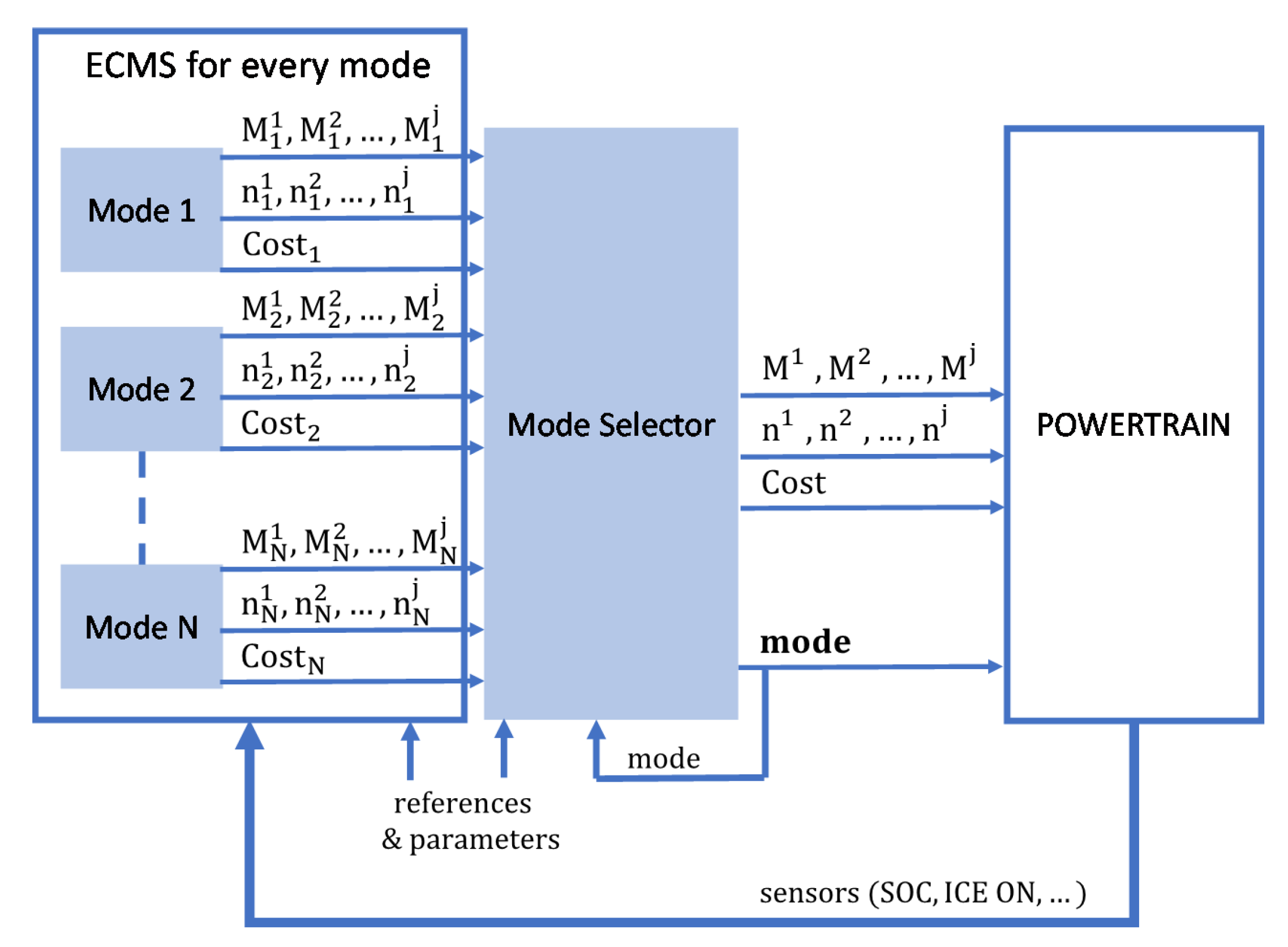
Figure 10 shows the general scheme as follows:
- (a)
The ECMS is applied independently for the N modes available in the powertrain. In this sense, for every powertrain mode i, the optimal speed and torque for any of the j engines and motors () with its corresponding minimum cost () is calculated.
- (b)
The previous information arrives at the mode selector, where the option with minimum cost is chosen. Directly comparing the cost of the different modes might result in a highly oscillating control policy, especially since the model barely addresses the system dynamics, which will not produce desirable results when applying the control to the actual powertrain. Every time a switch between modes is carried out, the powertrain experiences a transient that the model is not able to consider. To cope with this issue, the following optimization is proposed (Equation (
32)):
where
is the optimal mode to be applied at time-step
k,
represents the cost of mode
i at time-step
k,
is the cost of modifying the mode (so is 0 if the same mode in the previous time-step is employed) and
is an artificial cost to avoid the use of a particular mode (e.g., to ban the use of the series mode in a vehicle that has parallel architecture exclusively). Finally,
is a parameter to consider the mode minimizing the cost during a given time window instead of the instantaneous one. Note that
,
, and
are parameters to calibrate.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}