
Equivalent Consumption Minimization Strategy Based on Belt Drive System Characteristic Maps for P0 Hybrid Electric Vehicles

 ,
,  ,
,  , ,
, ,  and
and 
Abstract
:1. Introduction
- A novel formulation of ECMS takes into account the efficiency of BDS as a map. This map is obtained experimentally with a dedicated test bench. To the best of the authors’ knowledge, this approach is not present in the literature to date. Based on the vehicle architecture, the expected CO2 savings are around 1 g/km.
- A GA is used as optimization method to compute in a deterministic way the equivalence factors of the ECMS. This method reduces calibration time and identifies the optimal solution, which would otherwise be determined through trial and error.
2. Method
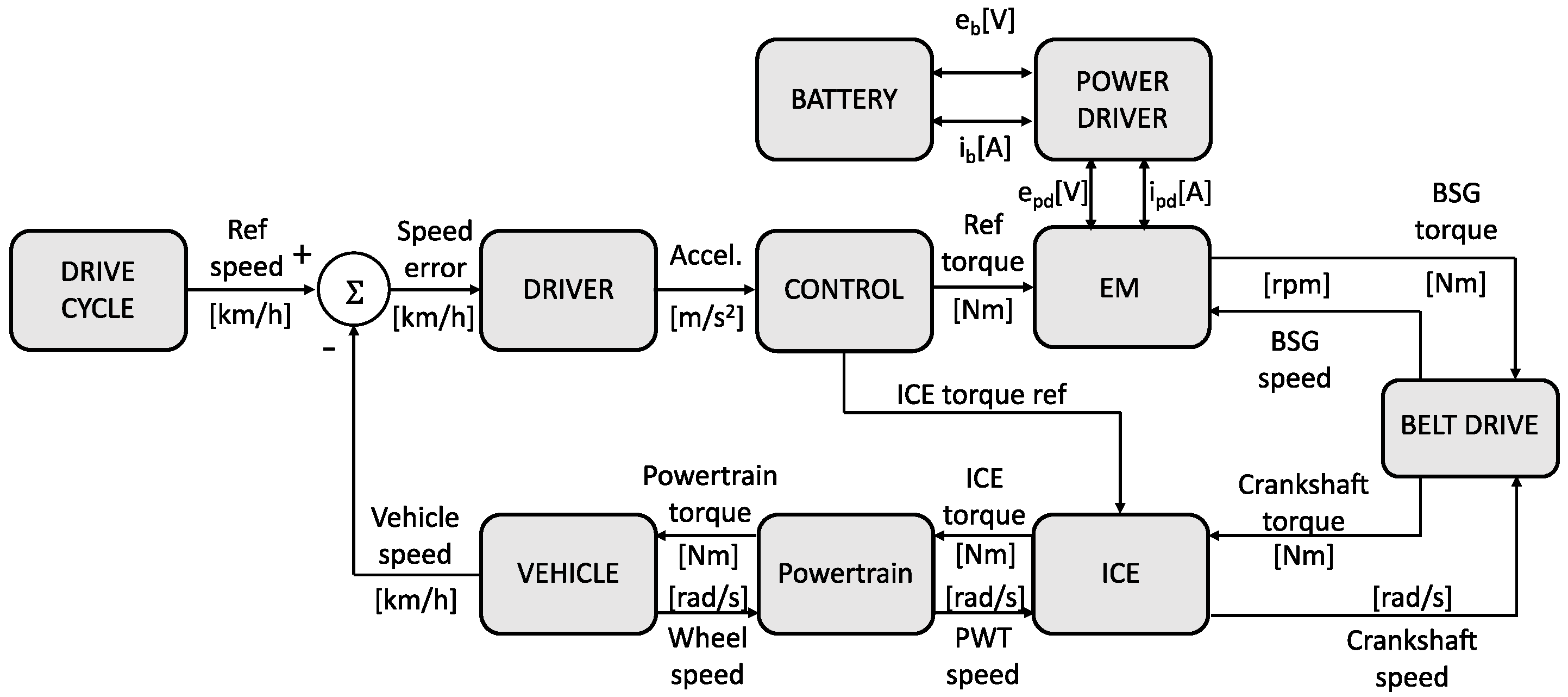
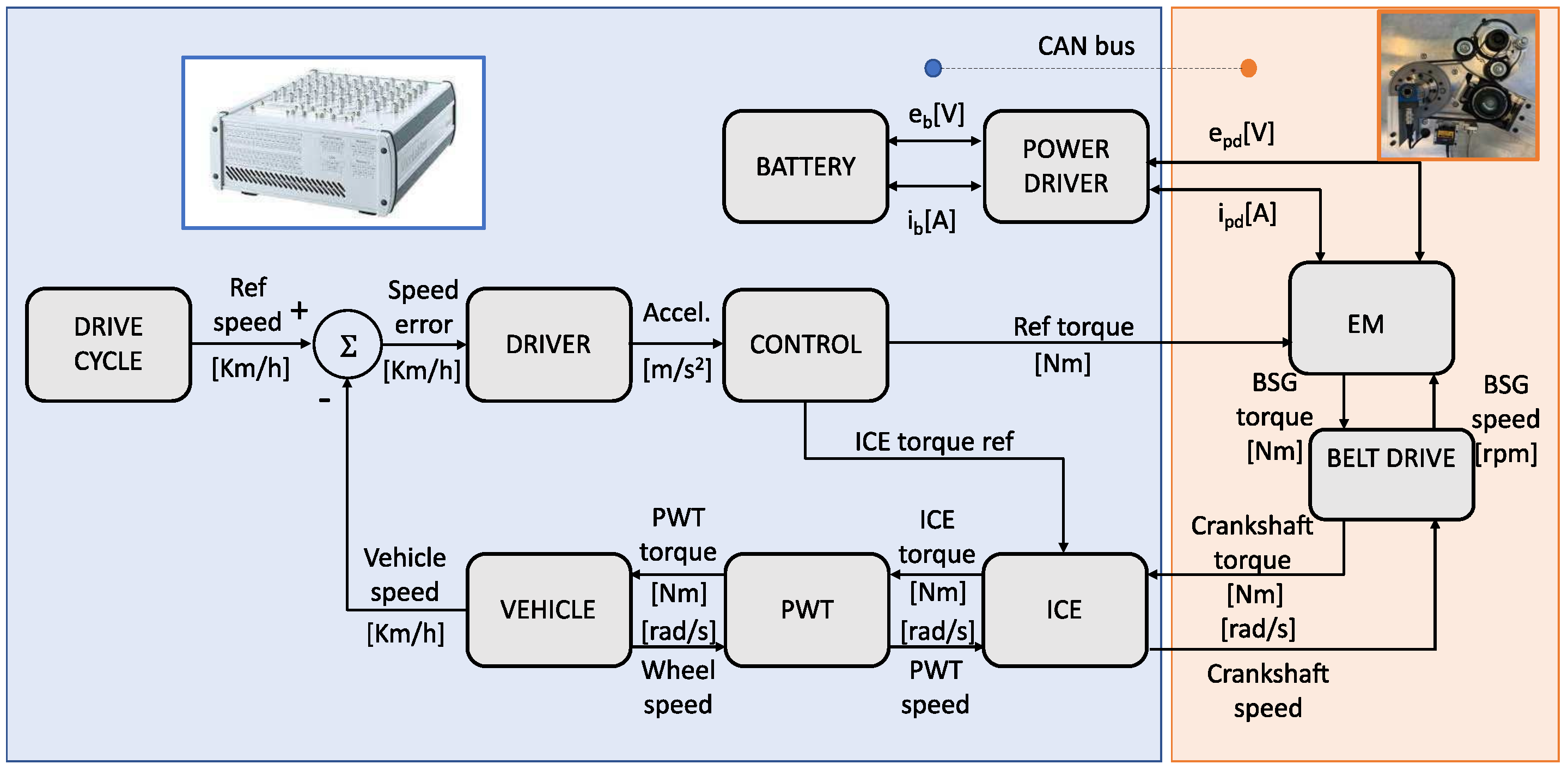
2.1. Vehicle Model
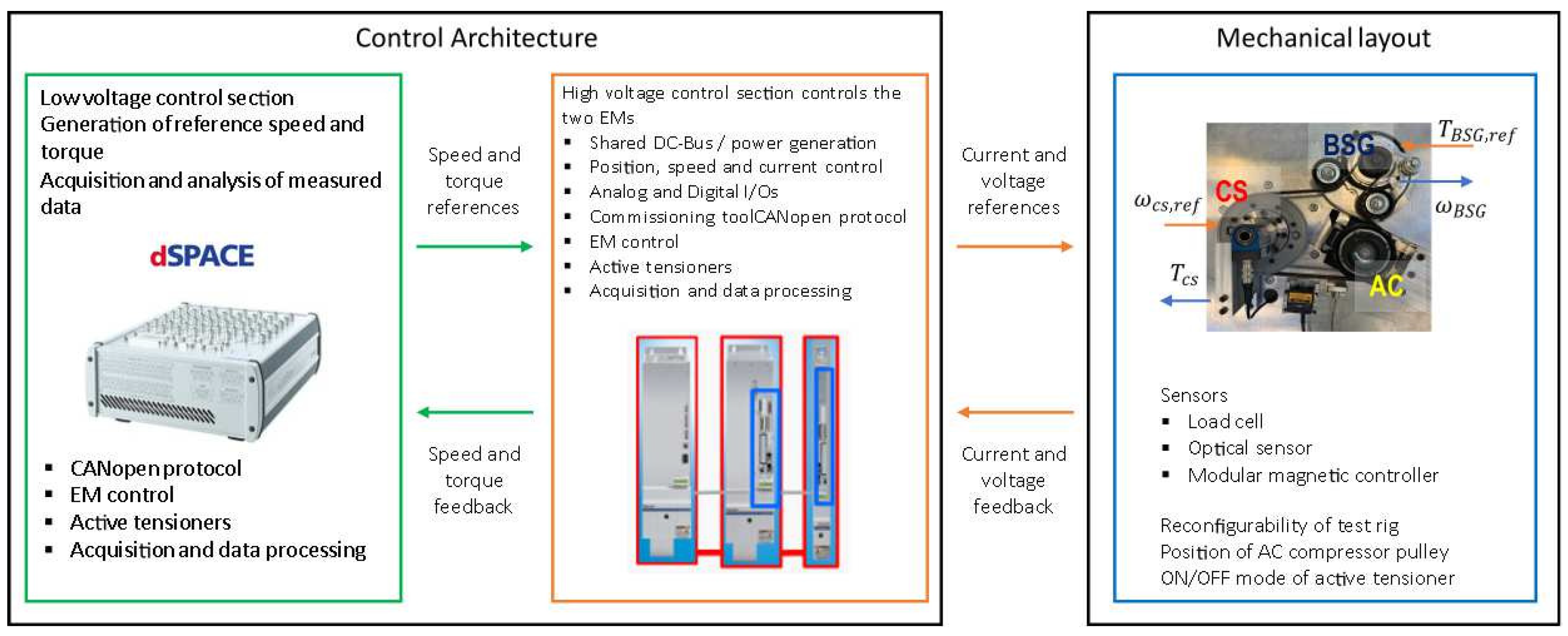
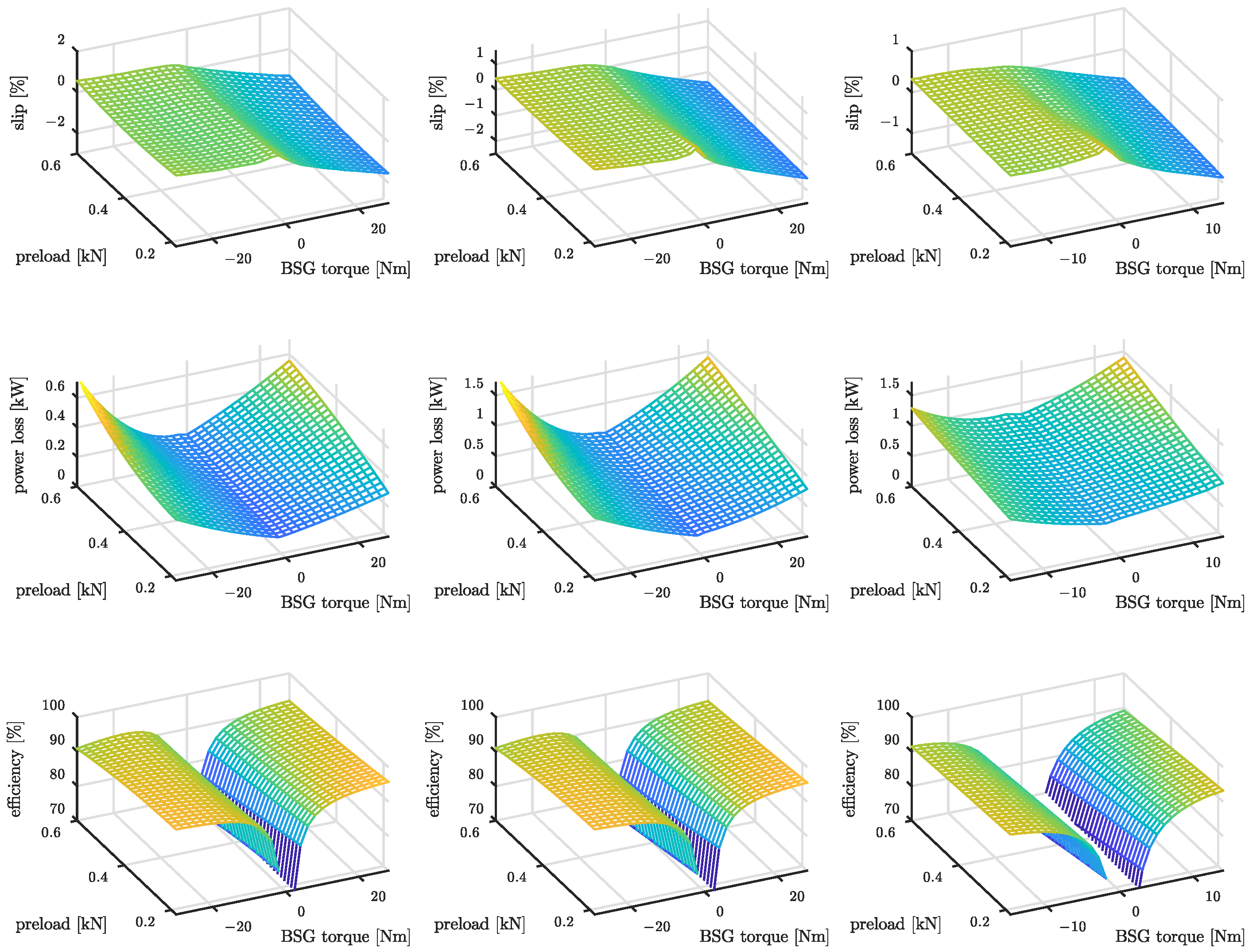
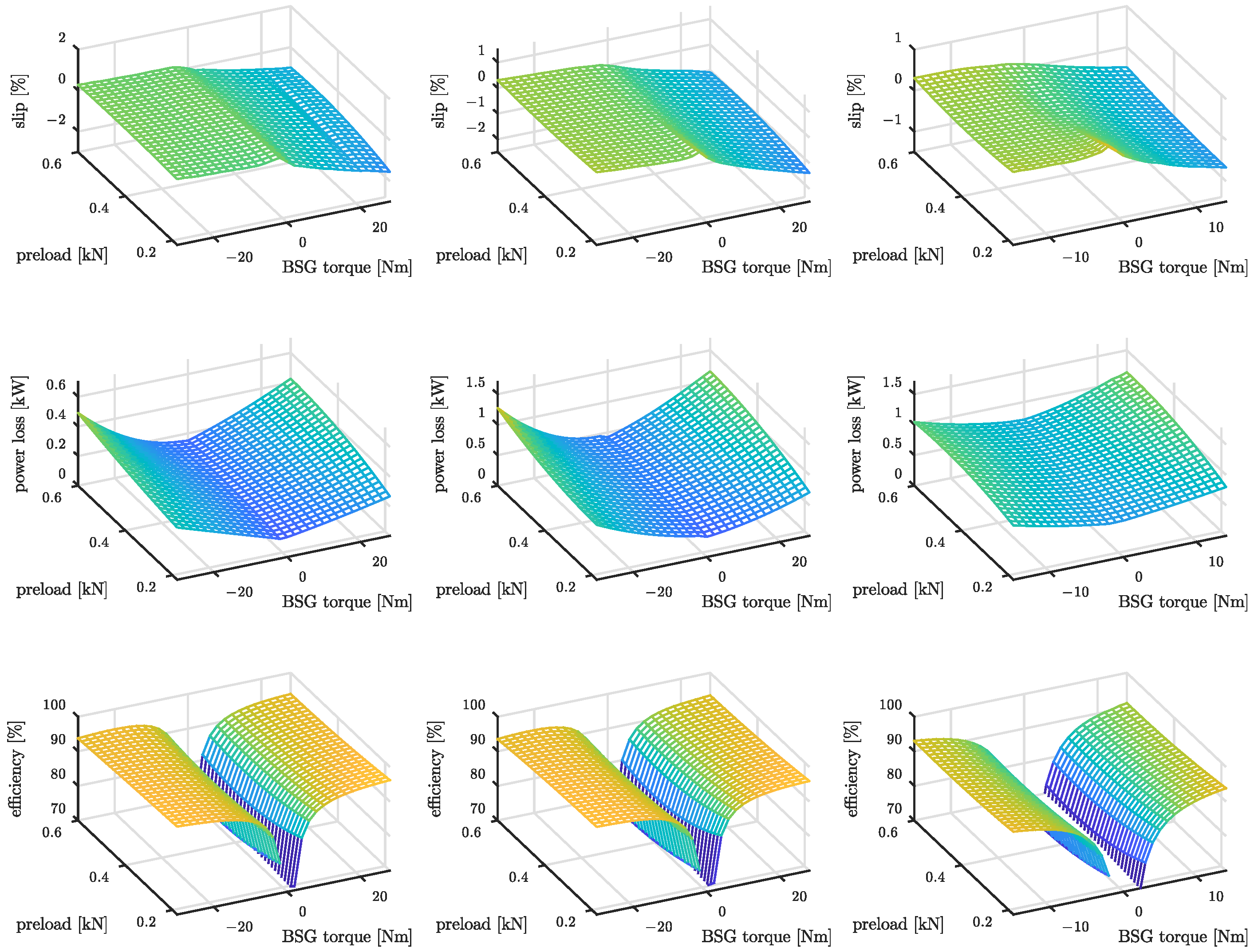
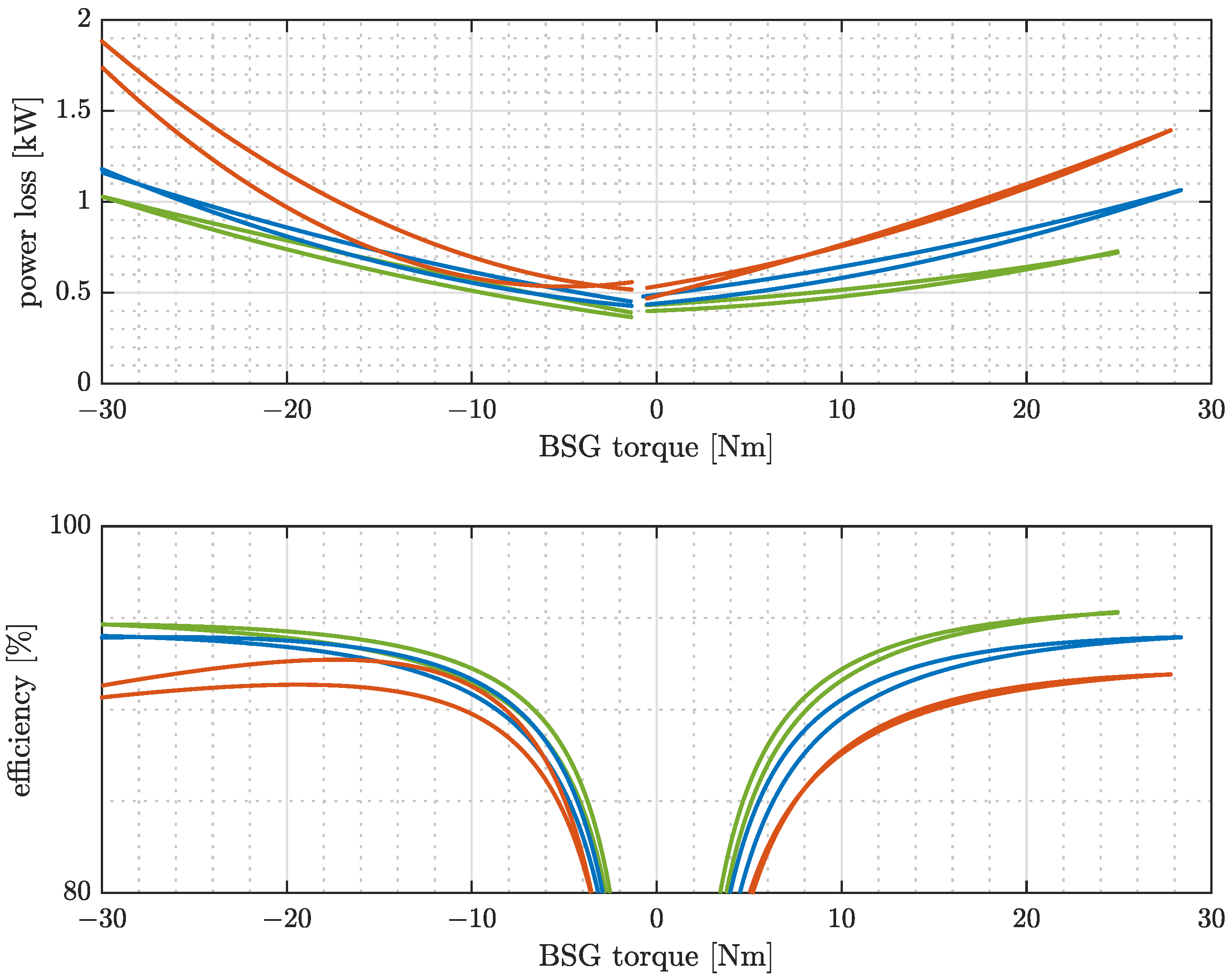
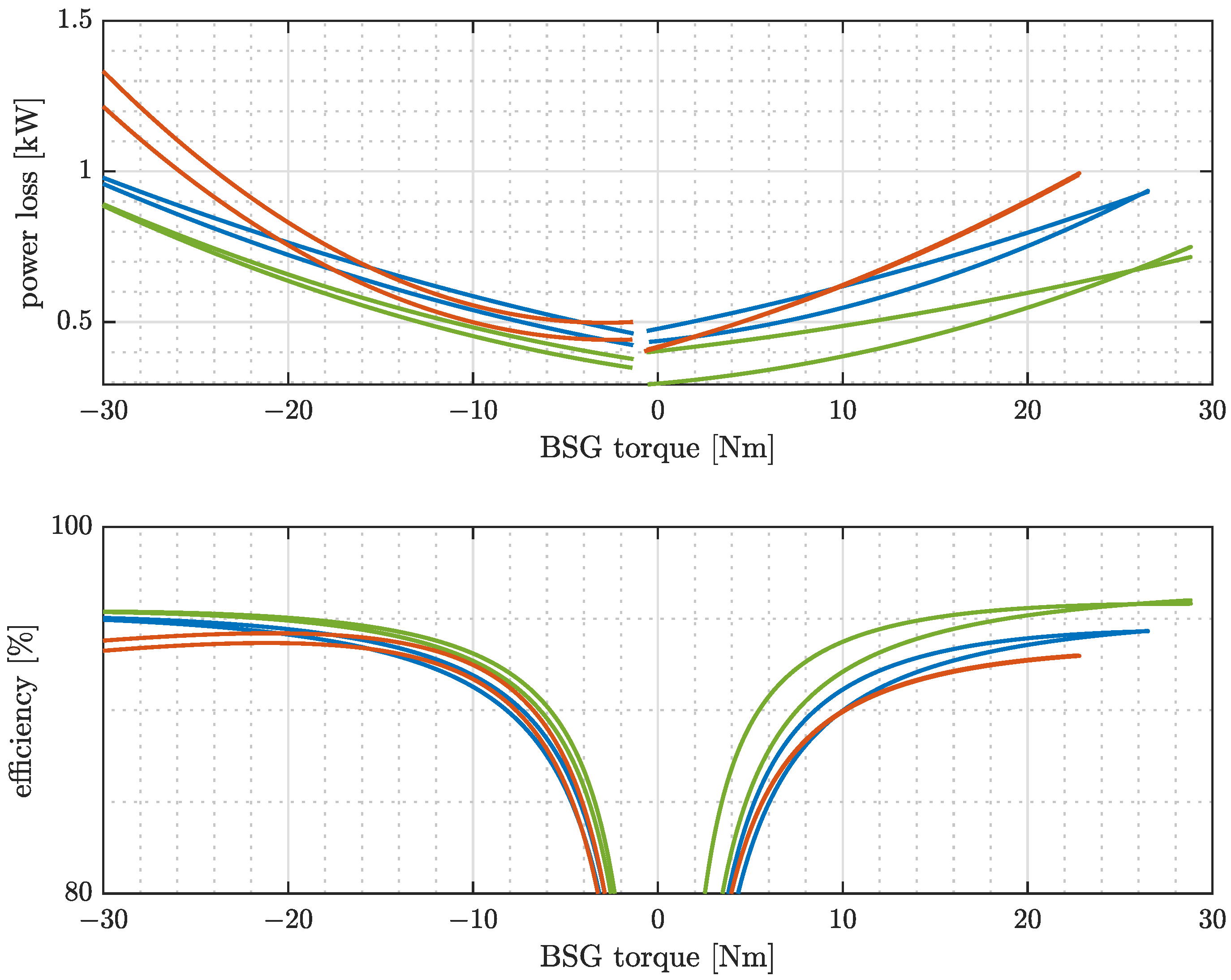
Belt Drive System Characterization
2.2. Energy Management System Design
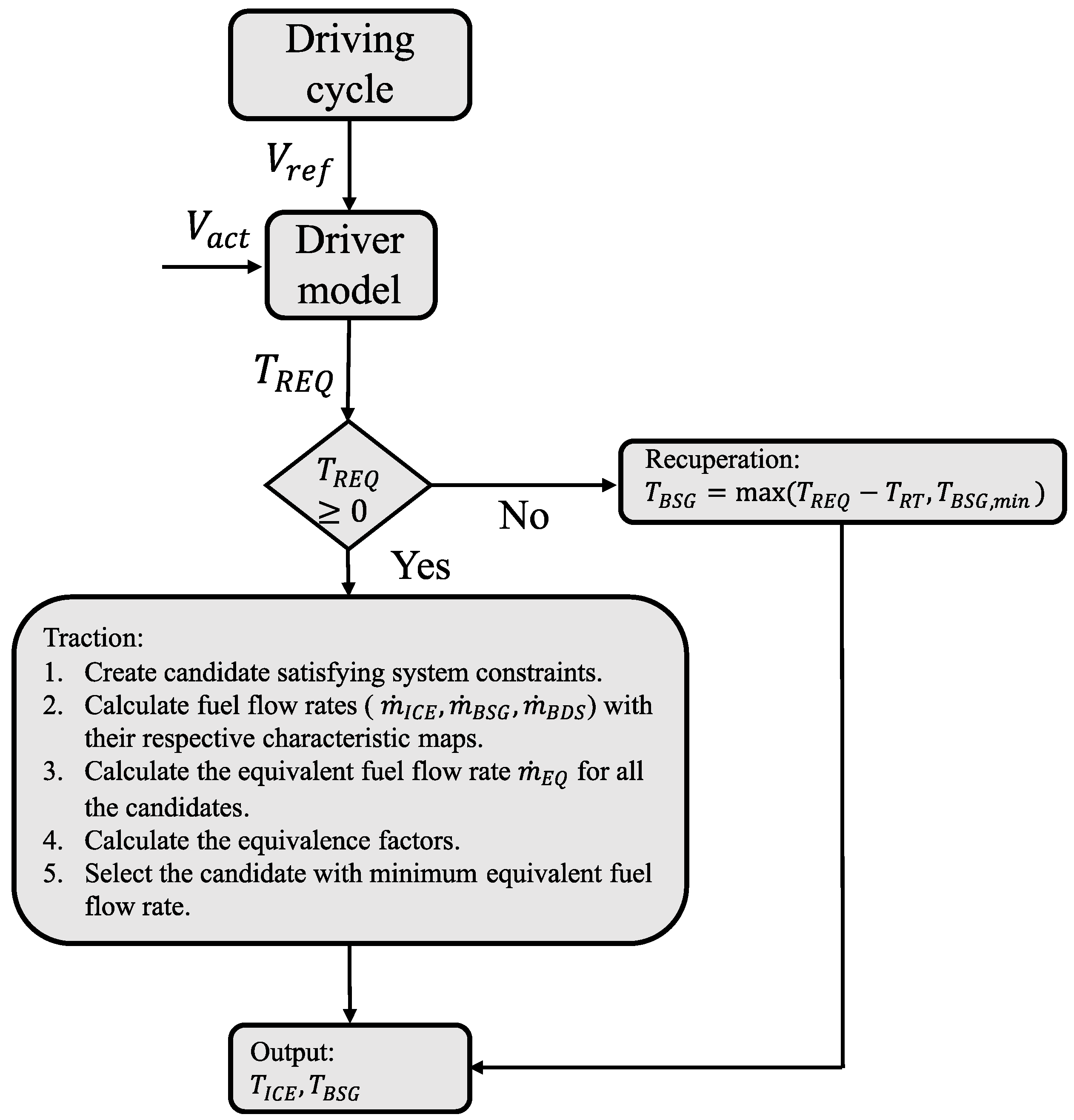
2.2.1. Equivalent Consumption Minimization Strategy (ECMS)
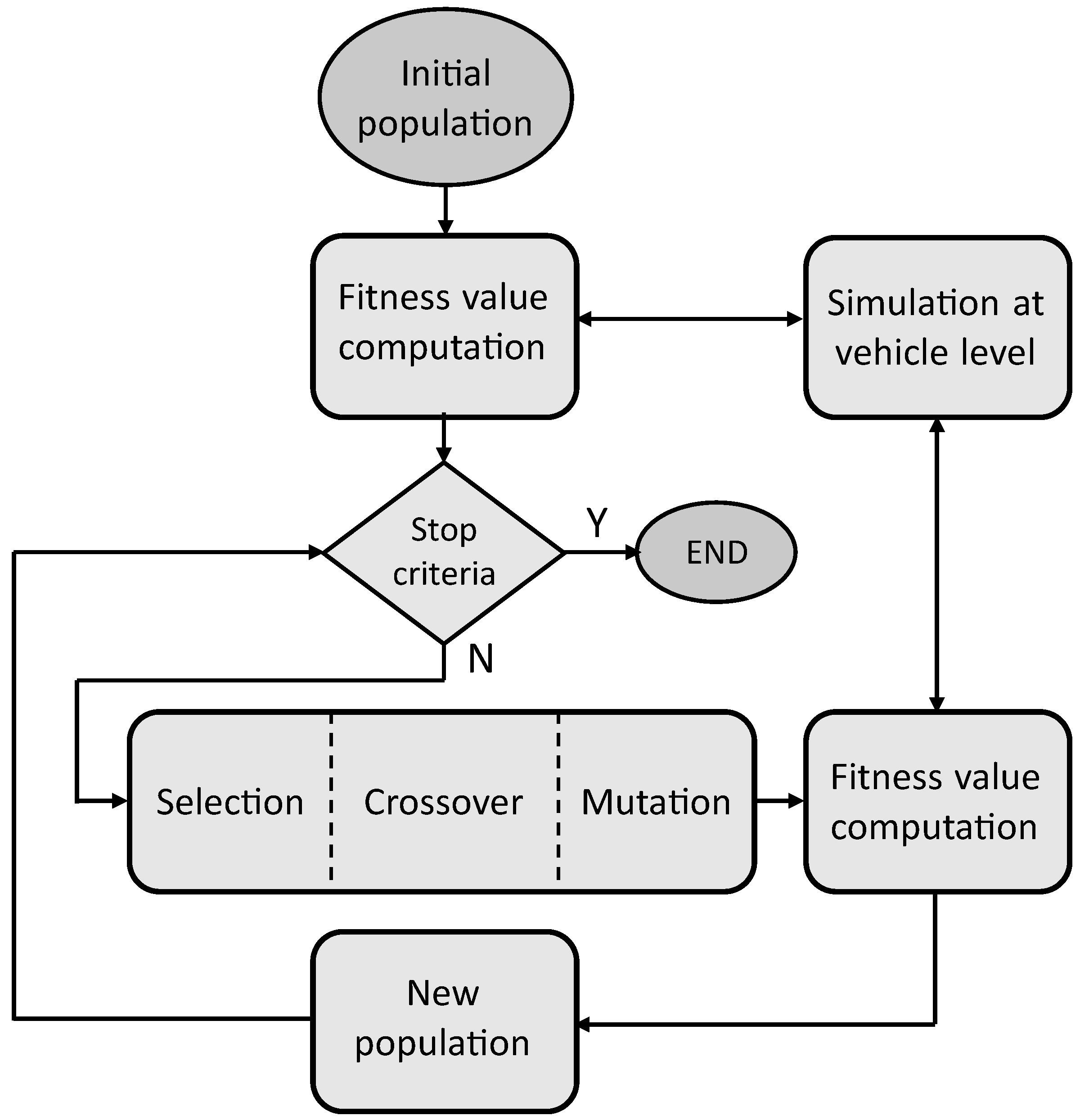
2.2.2. ECMS Equivalence Factors Selection with Genetic Algorithm
- The initial population with size 40 is generated with bounds of [0, …, 4].
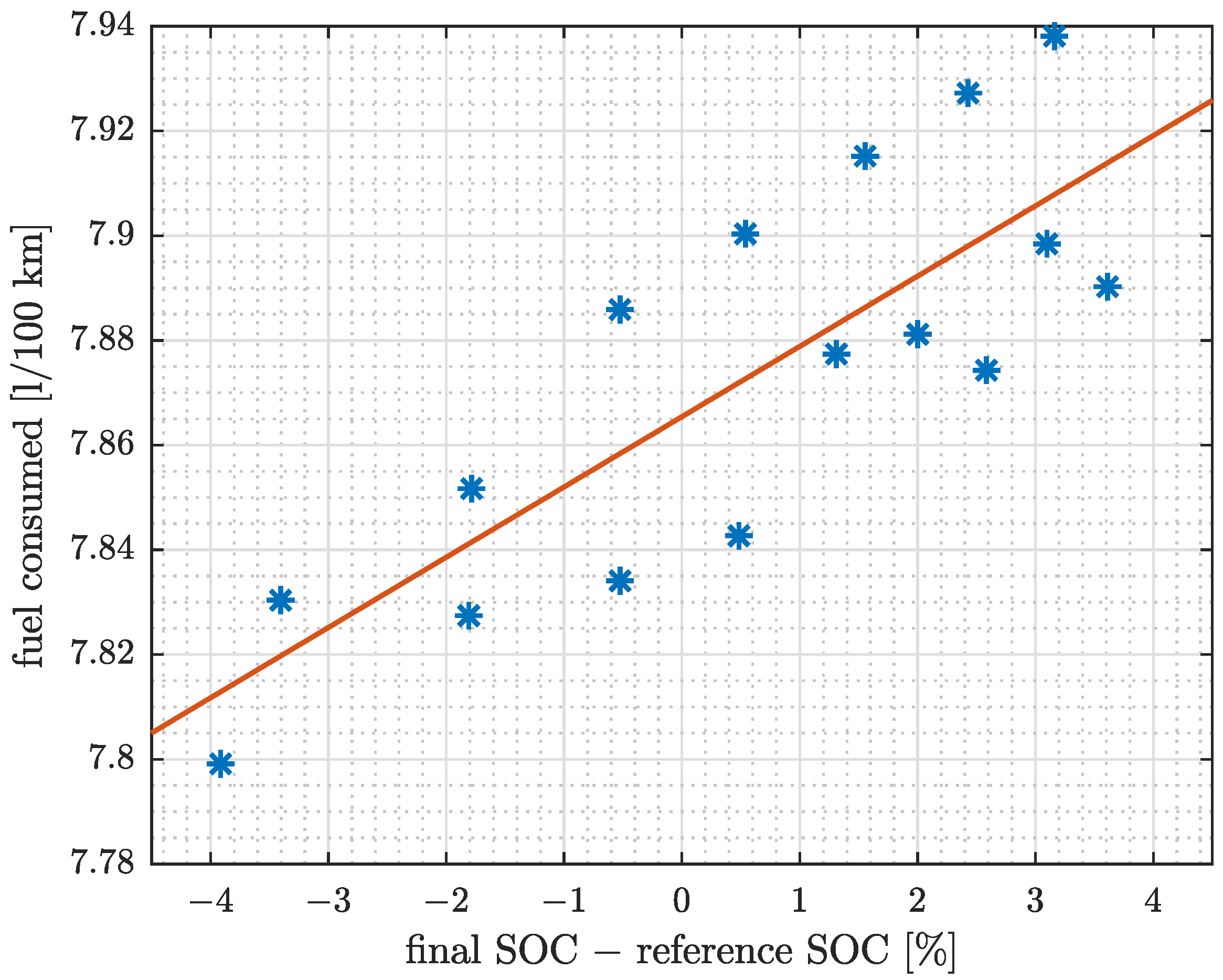
- Vehicle model simulation is performed for every candidate. The output of the simulation is the fuel consumption [ km] and . They are used to evaluate the fitness value, as:where is the consumed fuel in , is the difference between initial and final SOC, is the correction factor obtained from the fitting shown in Figure 14, and is the limit in SOC variation for GA fitness value. The is a big number to heavily penalize the fitness value for a big deviation in ().
- The best set of chromosomes is chosen (a stochastic uniform selection procedure is used).
- Survivor selection is based on elitism to retain the potential best solution for the next generation (the elite count is 2).
- The new population is generated by a crossover procedure.
- The mutation operation (Gaussian distribution) is performed to widen the search space.
- The fitness value of the new population is evaluated. Steps 2–7 are recursively iterated till the stopping criterion is met (50 generations).
3. Results and Discussion
3.1. Simulation Results Using Belt A
3.2. Simulation Results Using Belt B
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| BDS | Belt Drive System |
| ICE | Internal Combustion Engine |
| EVs | Electric Vehicles |
| EMS | Energy management system |
| HEVs | Hybrid Electric Vehicles |
| EM | Electric Machine |
| GA | Genetic Algorithm |
| ECMS | Equivalent Consumption Minimization Strategy |
| BSFC | Brake Specific Fuel Consumption |
| HIL | Hardware in the Loop |
| WLTP | World harmonized Light vehicles Test Procedure |
| BSG | Belt Starter Generator |
| BLDC | Brushless direct current electric motor |
| ECMS-BDS | Equivalent Consumption Minimization Strategy with belt drive system maps |
| SOC | State of Charge |
| V | Open circuit voltage |
| Open circuit voltage when battery is at full capacity | |
| Battery characteristic parameter | |
| Power at ICE crankshaft | |
| Power at BSG | |
| Torque of ICE crankshaft | |
| Torque of BSG | |
| Speed of ICE crankshaft | |
| Speed of BSG | |
| Dissipated power in BDS | |
| Transmission efficiency of belt drive system in boosting | |
| Transmission efficiency of belt drive system in recuperation | |
| Torque requested by the driver | |
| u | Ratio of BSG torque to total requested torque |
| Maximum ICE torque for a given speed | |
| Minimum BSG torque for a given speed | |
| Maximum BSG torque for a given speed | |
| Lower limit of SOC | |
| Upper limit of SOC | |
| Fuel flow rate of an engine | |
| Virtual fuel flow rate of the BSG | |
| Virtual fuel flow rate of the BDS | |
| Lower heating value of the fuel | |
| Electrical power of the BSG in motor mode | |
| Electrical power of the BSG in generator mode | |
| Power loss of the BDS in motor mode | |
| Power loss of the BDS in generator mode | |
| Equivalence factor of ECMS in discharging of battery | |
| Equivalence factor of ECMS in charging of battery | |
| SOC reference | |
| Equivalence factor provided by genetic algorithm in discharging of battery | |
| Equivalence factor provided by genetic algorithm in charging of battery | |
| Equivalence factor of the BDS | |
| Power loss of the BDS in motor mode | |
| Minimum power loss of the BDS in motor mode | |
| Maximum power loss of the BDS in motor mode | |
| Maximum power of the BSG in motor mode | |
| Torque reference to the hydraulic brakes | |
| ICE resisting torque | |
| Fitness value in genetic algorithm | |
| Fuel consumption | |
| Battery SOC at the end of a driving cycle | |
| Correction factor to correlate fuel consumption and SOC deviation | |
| Correction factor for heavy penalties | |
| Limit in SOC variation for GA fitness value | |
| Deviation in battery state of charge | |
| Corrected fuel consumption |
References
- Communication from the Commission to the European Parliament, the Council, the European Economic and Social Committee and the Committee of the Regions ’Fit for 55’: Delivering the EU’s 2030 Climate Target on the Way to Climate Neutrality. 2021. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX:52021DC0550 (accessed on 6 December 2022).
- EUR-Lex—32019R0631—EN—EUR-Lex. Doc ID: 32019R0631 Doc Sector: 3 Doc Title: Regulation (EU) 2019/631 of the European Parliament and of the Council of 17 April 2019 Setting CO2 Emission Performance Standards for New Passenger Cars and for New Light Commercial Vehicles, and Repealing Regulations (EC) No 443/2009 and (EU) No 510/2011 (recast) (Text with EEA Relevance.) Doc Type: R Usr_lan: En. Available online: https://eur-lex.europa.eu/eli/reg/2019/631/oj (accessed on 6 December 2022).
- Nguyen, H.P.; Hoang, A.T.; Le, A.T.; Pham, V.V.; Tran, V.N. Learned experiences from the policy and roadmap of advanced countries for the strategic orientation to electric vehicles: A case study in Vietnam. Energy Sources Part A Recovery Util. Environ. Eff. 2020, 1–10. [Google Scholar] [CrossRef]
- Nguyen, H.P.; Hoang, A.T.; Nizetic, S.; Nguyen, X.P.; Le, A.T.; Luong, C.N.; Chu, V.D.; Pham, V.V. The electric propulsion system as a green solution for management strategy of CO2 emission in ocean shipping: A comprehensive review. Int. Trans. Electr. Energy Syst. 2021, 31, e12580. [Google Scholar] [CrossRef]
- Liu, W. Introduction to Hybrid Vehicle System Modeling and Control; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2013. [Google Scholar] [CrossRef]
- Guzzella, L.; Sciarretta, A. Vehicle Propulsion Systems: Introduction to Modeling and Optimization, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Biswas, A.; Emadi, A. Energy Management Systems for Electrified Powertrains: State-of-the-Art Review and Future Trends. IEEE Trans. Veh. Technol. 2019, 68, 6453–6467. [Google Scholar] [CrossRef]
- Khan, I.; Ruzimov, S.; Amati, N.; Tonoli, A. Study of the Impact of E-Machine in Hybrid Dual Clutch Transmission Powertrain. Energies 2022, 15, 945. [Google Scholar] [CrossRef]
- Denis, N.; Dubois, M.R.; Trovao, J.P.F.; Desrochers, A. Power Split Strategy Optimization of a Plug-in Parallel Hybrid Electric Vehicle. IEEE Trans. Veh. Technol. 2018, 67, 315–326. [Google Scholar] [CrossRef]
- Piccolo, A.; Ippolito, L.; zo Galdi, V.; Vaccaro, A. Optimisation of energy flow management in hybrid electric vehicles via genetic algorithms. In Proceedings of the 2001 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Proceedings (Cat. No.01TH8556), Como, Italy, 8–12 July 2001; Volume 1, pp. 434–439. [Google Scholar] [CrossRef]
- Yi, F.; Lv, Z.; Liu, Y.; Liu, H. Fuzzy adaptive control strategy with improved PSO algorithm for parallel hybrid electric vehicle. Int. J. Simul. Syst. Sci. Technol. 2016, 17. [Google Scholar] [CrossRef]
- Kolmanovsky, I.; Siverguina, I.; Lygoe, B. Optimization of powertrain operating policy for feasibility assessment and calibration: Stochastic dynamic programming approach. In Proceedings of the 2002 American Control Conference (IEEE Cat. No.CH37301), Anchorage, AK, USA, 8–10 May 2002; Volume 2, pp. 1425–1430. [Google Scholar] [CrossRef]
- Onori, S.; Serrao, L.; Rizzoni, G. Hybrid Electric Vehicles; SpringerBriefs in Electrical and Computer Engineering; Springer: London, UK, 2016. [Google Scholar] [CrossRef]
- He, L.; Shen, T.; Yu, L.; Feng, N.; Song, J. A Model-Predictive-Control-Based Torque Demand Control Approach for Parallel Hybrid Powertrains. IEEE Trans. Veh. Technol. 2013, 62, 1041–1052. [Google Scholar] [CrossRef]
- Kermani, S.; Delprat, S.; Guerra, T.; Trigui, R.; Jeanneret, B. Predictive energy management for hybrid vehicle. Control Eng. Pract. 2012, 20, 408–420. [Google Scholar] [CrossRef]
- Borhan, H.; Vahidi, A.; Phillips, A.M.; Kuang, M.L.; Kolmanovsky, I.V.; Di Cairano, S. MPC-Based Energy Management of a Power-Split Hybrid Electric Vehicle. IEEE Trans. Control Syst. Technol. 2012, 20, 593–603. [Google Scholar] [CrossRef]
- Paganelli, G.; Guerra, T.M.; Delprat, S.; Santin, J.J.; Delhom, M.; Combes, E. Simulation and assessment of power control strategies for a parallel hybrid car. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2000, 214, 705–717. [Google Scholar] [CrossRef]
- Gao, A.; Deng, X.; Zhang, M.; Fu, Z. Design and Validation of Real-Time Optimal Control with ECMS to Minimize Energy Consumption for Parallel Hybrid Electric Vehicles. Math. Probl. Eng. 2017, 2017, 3095347. [Google Scholar] [CrossRef] [Green Version]
- Rezaei, A. An Optimal Energy Management Strategy for Hybrid Electric Vehicles. Ph.D. Thesis, Michigan Technological University, Houghton, MI, USA, 2017. [Google Scholar] [CrossRef]
- Torres, J.; Gonzalez, R.; Gimenez, A.; Lopez, J. Energy management strategy for plug-in hybrid electric vehicles. A comparative study. Appl. Energy 2014, 113, 816–824. [Google Scholar] [CrossRef]
- Khoucha, F.; Benbouzid, M.; Kheloui, A. An optimal fuzzy logic power sharing strategy for Parallel Hybrid Electric Vehicles. In Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference, Lille, France, 1–3 September 2010; pp. 1–5. [Google Scholar] [CrossRef] [Green Version]
- Murphey, Y.L.; Park, J.; Kiliaris, L.; Kuang, M.L.; Masrur, M.A.; Phillips, A.M.; Wang, Q. Intelligent Hybrid Vehicle Power Control—Part II: Online Intelligent Energy Management. IEEE Trans. Veh. Technol. 2013, 62, 69–79. [Google Scholar] [CrossRef]
- Balan, G.; Arumugam, S.; Muthusamy, S.; Panchal, H.; Kotb, H.; Bajaj, M.; Ghoneim, S.S.M.; Kitmo. An Improved Deep Learning-Based Technique for Driver Detection and Driver Assistance in Electric Vehicles with Better Performance. Int. Trans. Electr. Energy Syst. 2022, 2022, 8548172. [Google Scholar] [CrossRef]
- Selvaraj, D.C.; Hegde, S.; Amati, N.; Deflorio, F.; Chiasserini, C.F. An ML-aided Reinforcement Learning Approach for Challenging Vehicle Maneuvers. IEEE Trans. Intell. Veh. 2022, 1–13. [Google Scholar] [CrossRef]
- Ramshanker, A.; Chakraborty, S.; Elangovan, D.; Kotb, H.; Aboras, K.M.; Giri, N.C.; Agyekum, E.B. CO2 Emission Analysis for Different Types of Electric Vehicles When Charged from Floating Solar Photovoltaic Systems. Appl. Sci. 2022, 12, 12552. [Google Scholar] [CrossRef]
- Hegde, S.; Bonfitto, A.; Rahmeh, H.; Amati, N.; Tonoli, A. Optimal selection of equivalence factors for ECMS in mild hybrid electric vehicles. In Proceedings of the ASME 2021 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Virtual Online, 17–19 August 2021; p. V001T01A019. [Google Scholar] [CrossRef]
- Rajamani, R. Vehicle Dynamics and Control, 2nd ed.; Mechanical Engineering Series; Springer: New York, NY, USA, 2012. [Google Scholar]
- Bonfitto, A. A Method for the Combined Estimation of Battery State of Charge and State of Health Based on Artificial Neural Networks. Energies 2020, 13, 2548. [Google Scholar] [CrossRef]
- Bonfitto, A.; Ezemobi, E.; Amati, N.; Feraco, S.; Tonoli, A.; Hegde, S. State of health estimation of lithium batteries for automotive applications with artificial neural networks. In Proceedings of the 2019 AEIT International Conference of Electrical and Electronic Technologies for Automotive (AEIT AUTOMOTIVE), Torino, Italy, 2–4 July 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Subramanian, M.; Hoang, A.T.; Kalidasan, B.; Nižetić, S.; Solomon, J.M.; Balasubramanian, D.; C, S.; G, T.; Metghalchi, H.; Nguyen, X.P. A technical review on composite phase change material based secondary assisted battery thermal management system for electric vehicles. J. Clean. Prod. 2021, 322, 129079. [Google Scholar] [CrossRef]
- di Napoli, M.; Galluzzi, R.; Zenerino, E.C.; Tonoli, A.; Amati, N. Investigation on the performances of a twin arm tensioning device. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2019, 233, 1687–1697. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Unit |
|---|---|---|
| Mass | 2000 | [kg] |
| Drag coefficient | 0.25 | [-] |
| Engine Characteristic | Diesel 238 Nm | [-] |
| Electric machine characteristics | BLDC 13 kW | [-] |
| Battery nominal voltage | 48 | [V] |
| Battery Capacity | 25 | [Ah] |
| Belt drive transmission ratio | 3 | [-] |
| Transmission | 12-speed automatic | [-] |
| Final drive ratio | 3.1 | [-] |
| Wheel radius | 0.31 | [m] |
| Rolling resistance coefficient | 0.02 | [-] |
| Subsystem | Modes | Energy [kJ] (Standard ECMS) | Energy [kJ] (ECMS-BDS) |
|---|---|---|---|
| BSG | Motor | 1245 | 1372 |
| Generator | −2176 | −2176 | |
| BDS losses | Motor | 120 | 197 |
| Idle | 364 | 279 | |
| Generator | 147 | 147 |
| Controller Type | CO2 Emissions [g/km] | CO2 Emission Savings [g/km] |
|---|---|---|
| Standard ECMS | 205.7 | - |
| ECMS-BDS | 204.6 | 1.1 |
| Subsystem | Modes | Energy [kJ] (Standard ECMS) | Energy [kJ] (ECMS-BDS) |
|---|---|---|---|
| BSG | Motor | 1295 | 1395 |
| Generator | −2203 | −2203 | |
| BDS losses | Motor | 94 | 152 |
| Idle | 259 | 189 | |
| Generator | 114 | 114 |
| Controller Type | CO2 Emissions [g/km] | CO2 Emission Savings [g/km] |
|---|---|---|
| Standard ECMS | 203.6 | - |
| ECMS-BDS | 202.7 | 0.9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hegde, S.; Bonfitto, A.; Galluzzi, R.; Molina, L.M.C.; Amati, N.; Tonoli, A. Equivalent Consumption Minimization Strategy Based on Belt Drive System Characteristic Maps for P0 Hybrid Electric Vehicles. Energies 2023, 16, 487. https://doi.org/10.3390/en16010487
Hegde S, Bonfitto A, Galluzzi R, Molina LMC, Amati N, Tonoli A. Equivalent Consumption Minimization Strategy Based on Belt Drive System Characteristic Maps for P0 Hybrid Electric Vehicles. Energies. 2023; 16(1):487. https://doi.org/10.3390/en16010487
Chicago/Turabian StyleHegde, Shailesh, Angelo Bonfitto, Renato Galluzzi, Luis M. Castellanos Molina, Nicola Amati, and Andrea Tonoli. 2023. "Equivalent Consumption Minimization Strategy Based on Belt Drive System Characteristic Maps for P0 Hybrid Electric Vehicles" Energies 16, no. 1: 487. https://doi.org/10.3390/en16010487
APA StyleHegde, S., Bonfitto, A., Galluzzi, R., Molina, L. M. C., Amati, N., & Tonoli, A. (2023). Equivalent Consumption Minimization Strategy Based on Belt Drive System Characteristic Maps for P0 Hybrid Electric Vehicles. Energies, 16(1), 487. https://doi.org/10.3390/en16010487