
Wind Microturbine with Adjustable Blade Pitch Angle

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Working Principle of Wind Turbine
2.2. The Most Commonly Used Methods of Optimal Control of Wind Turbine Operation
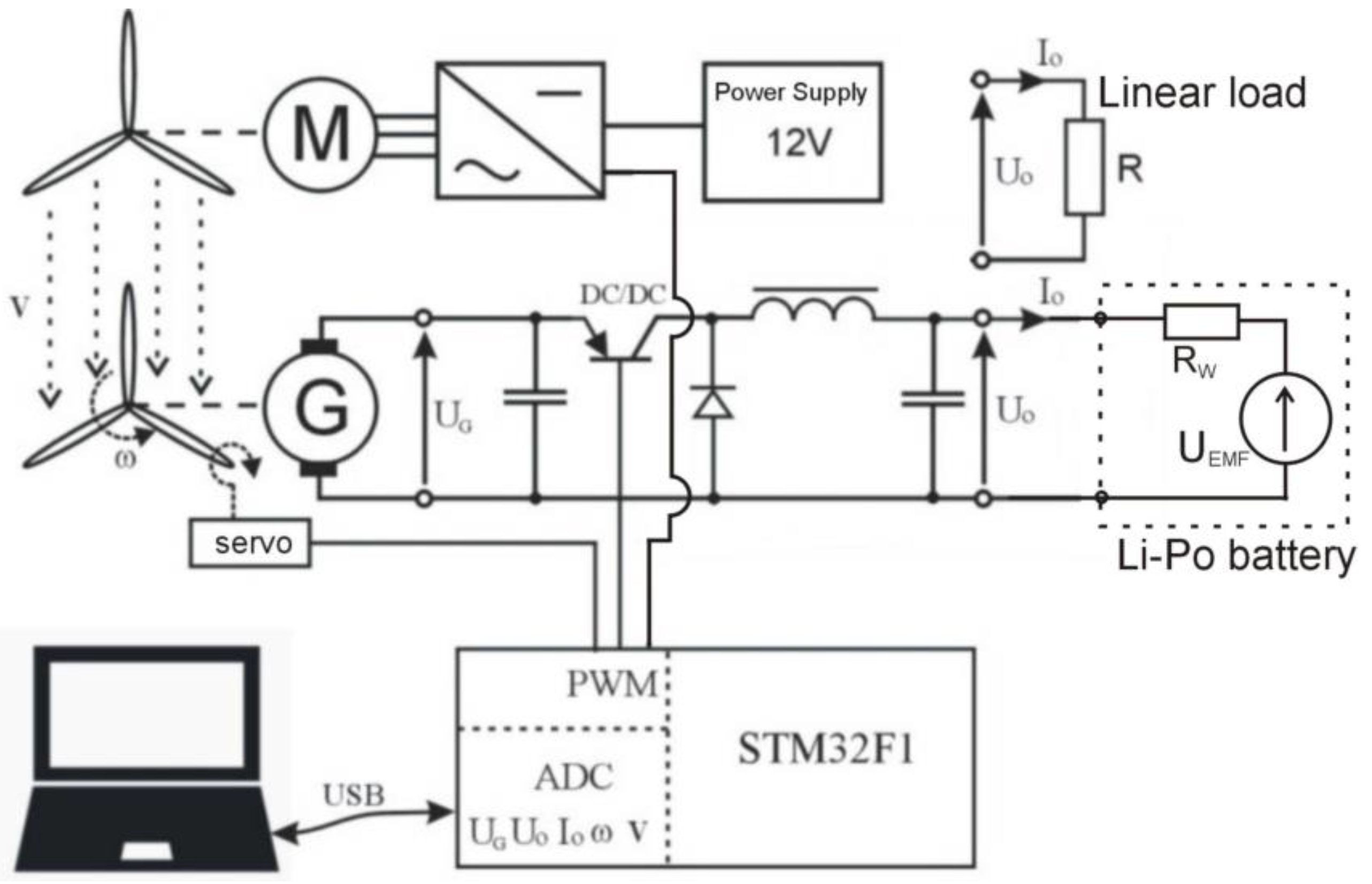
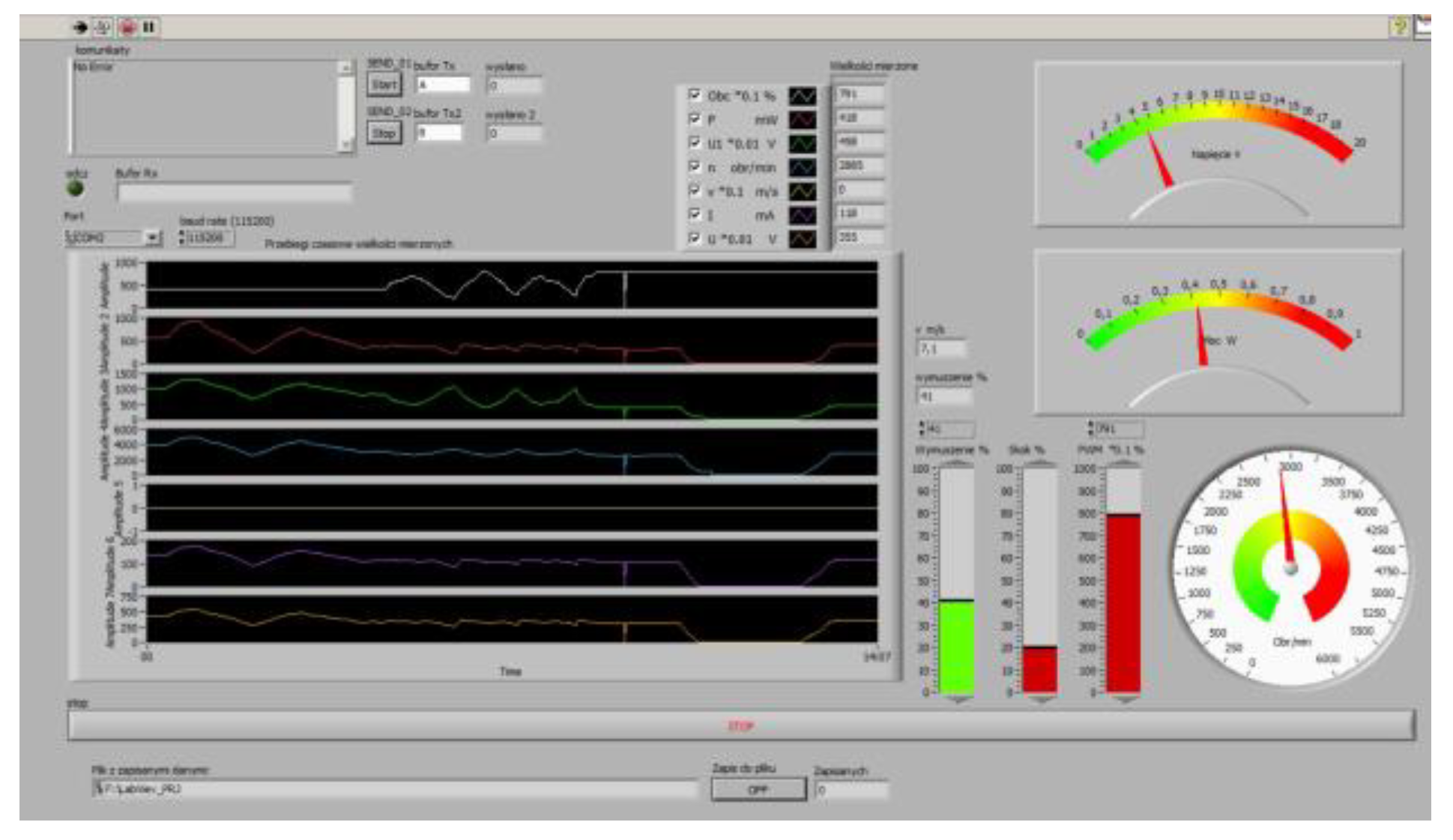
2.3. Experimental Stand
3. Results and Discussion
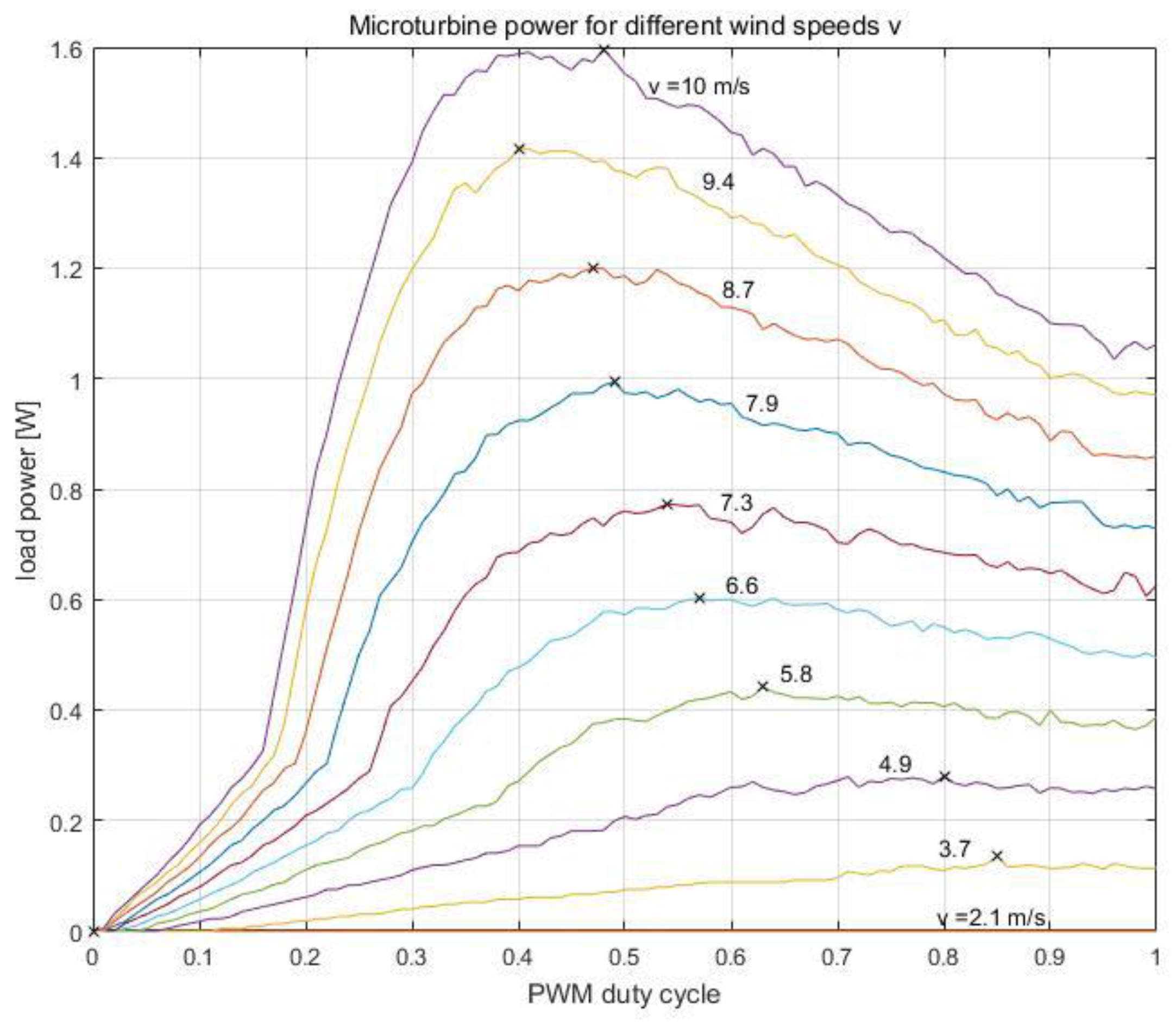
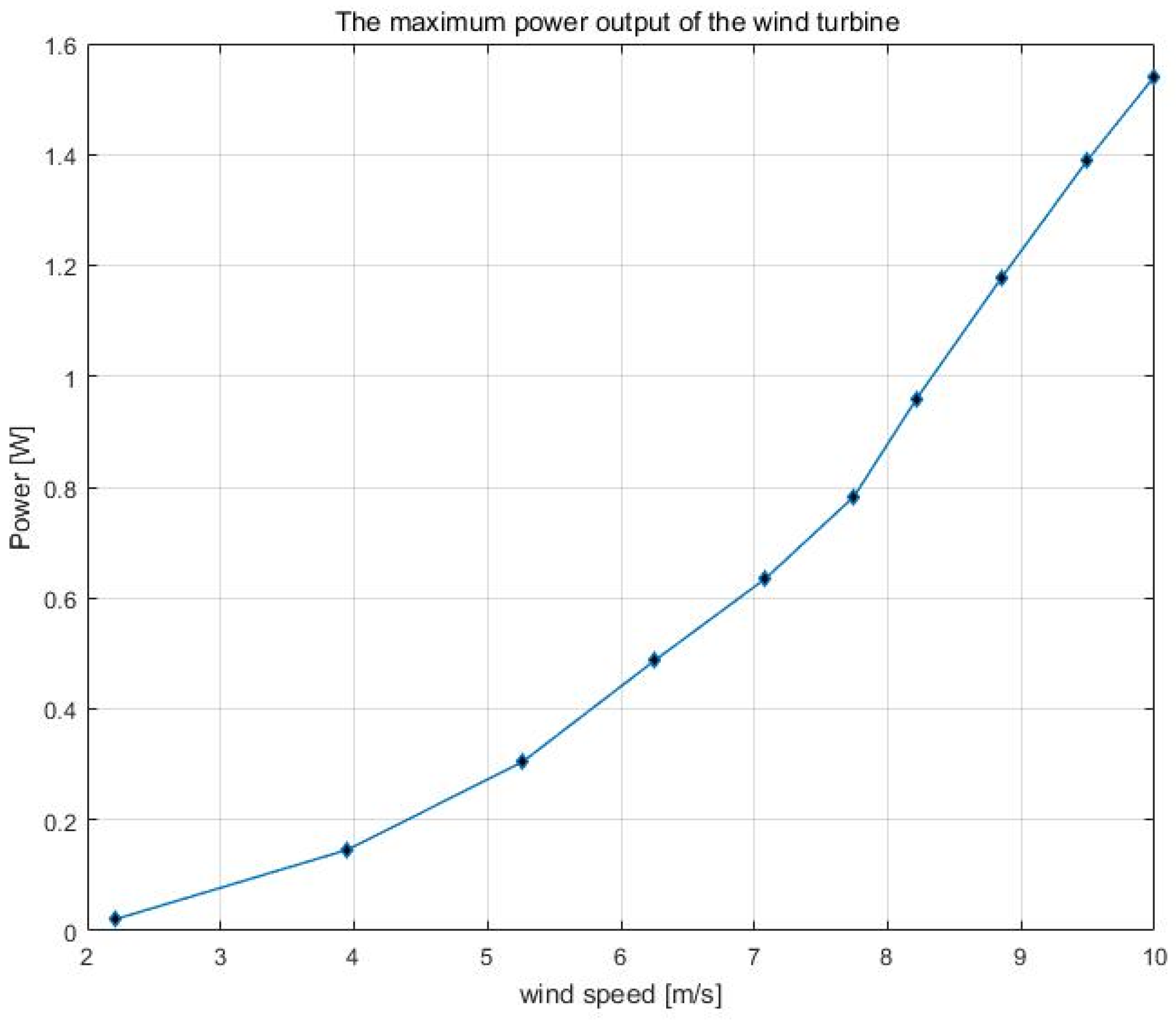
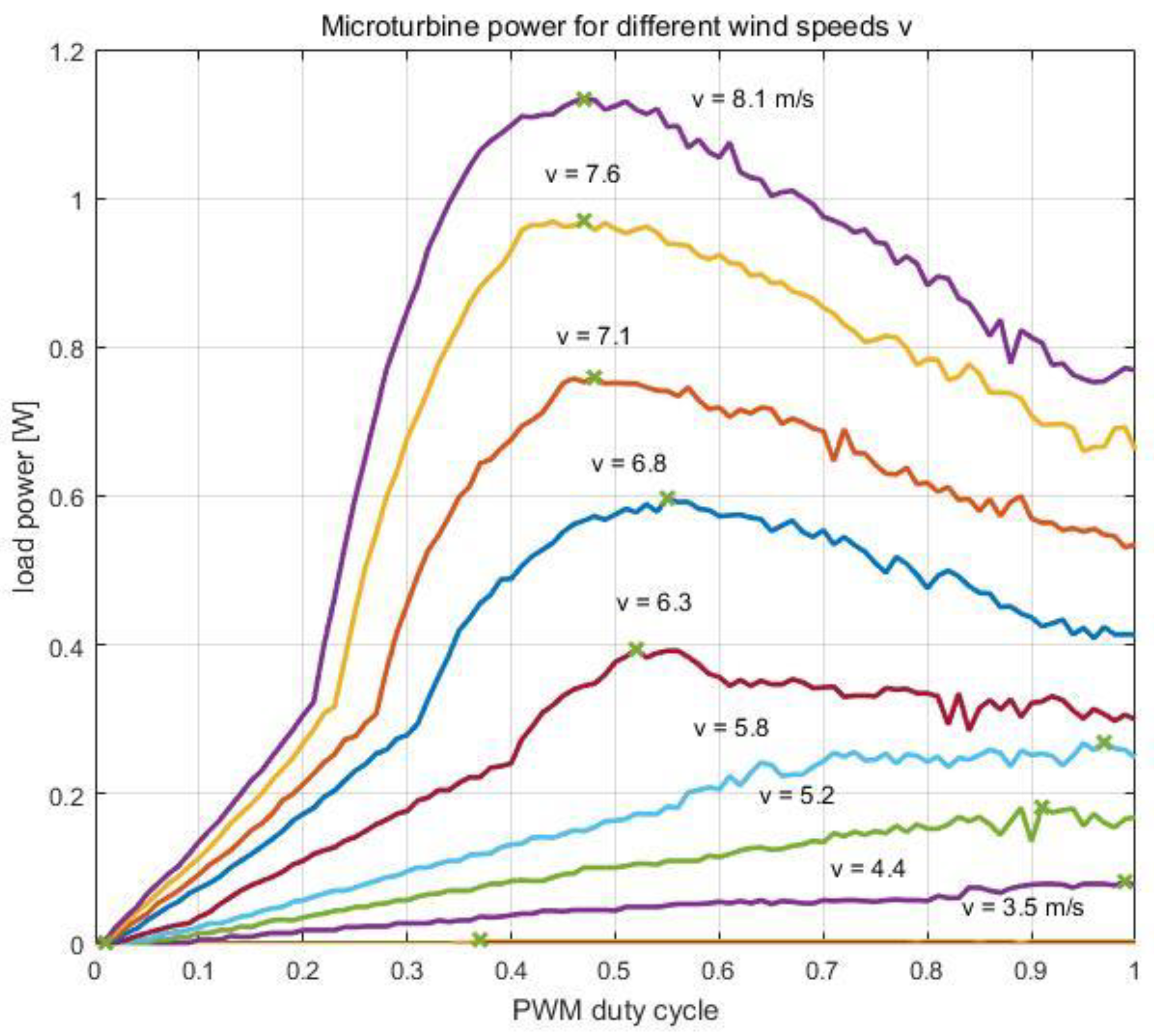
3.1. Wind Turbine with a Classic Aerofoil Profile Blade
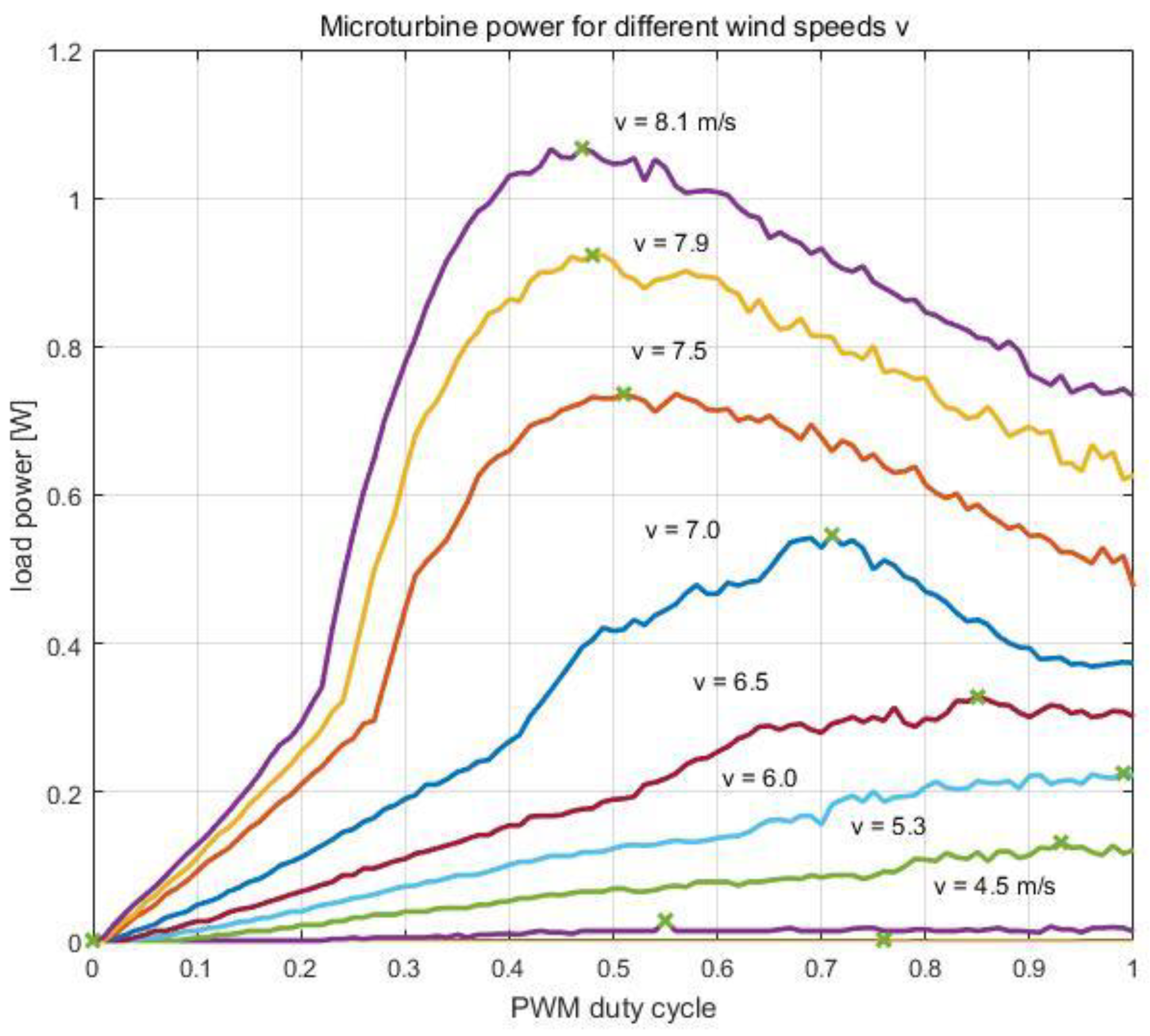
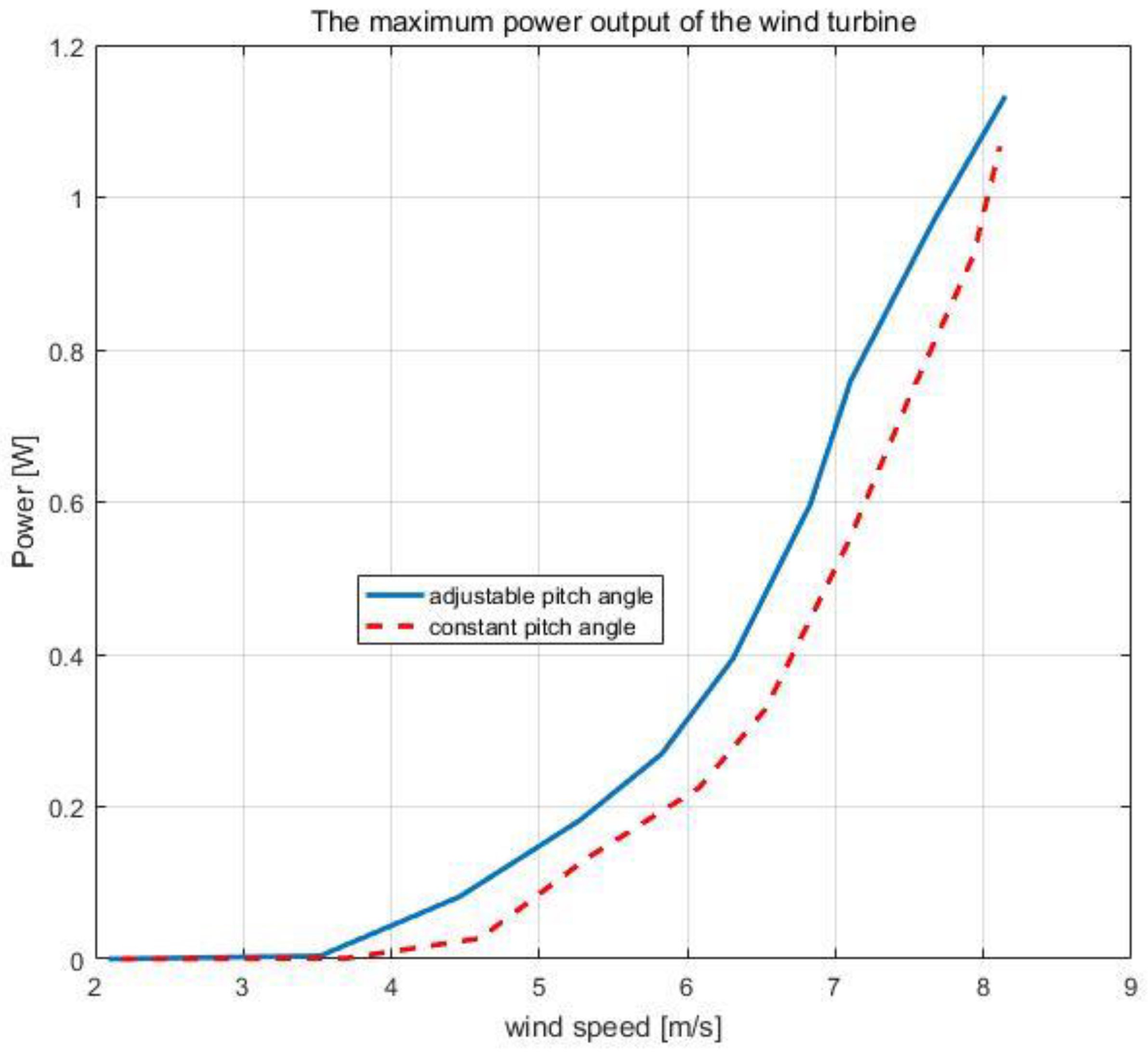
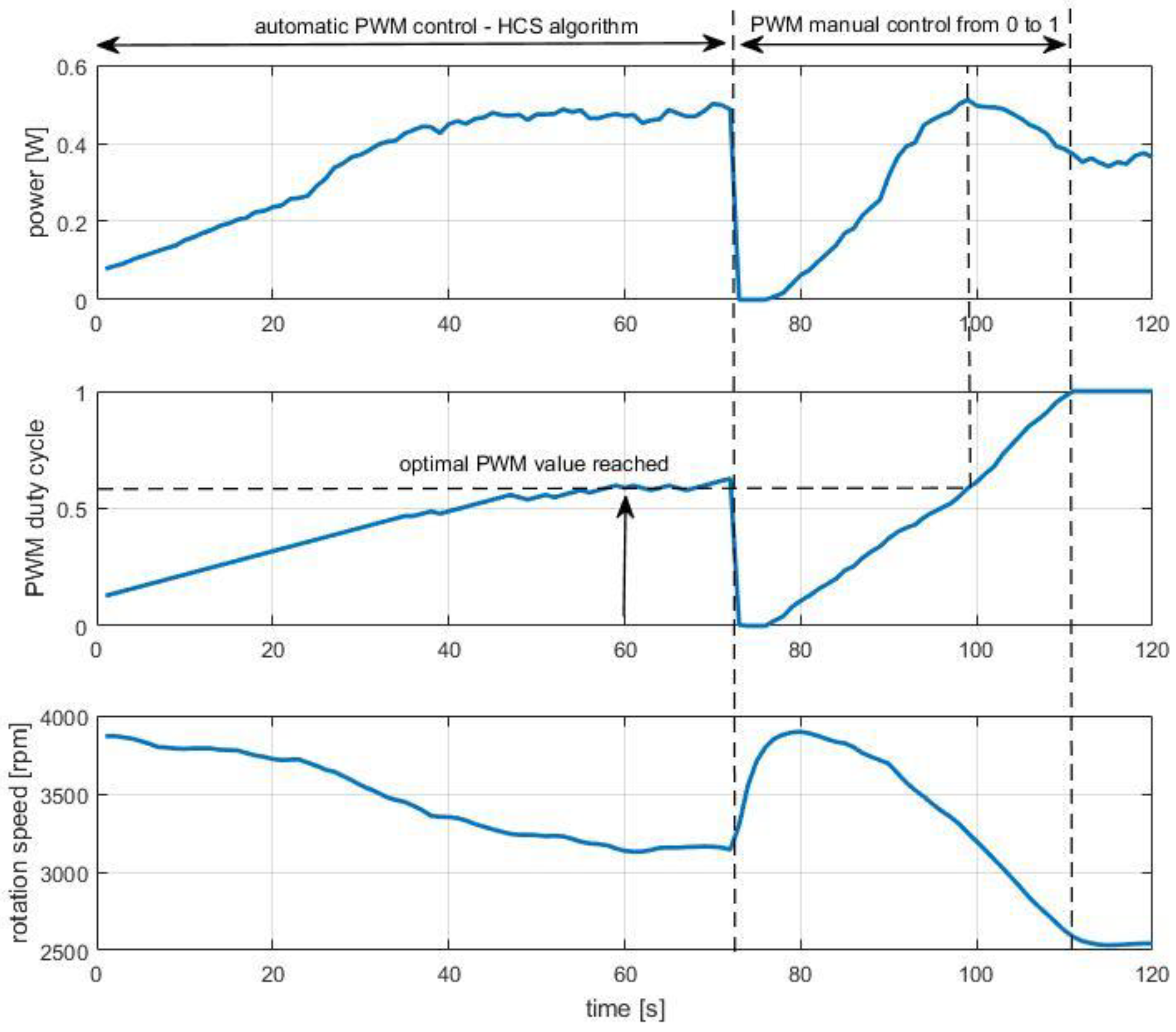
3.2. Wind Turbine with Adjustable Pitch
4. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wu, Q.; Sun, Y. (Eds.) Modeling and Modern Control of Wind Power; John Wiley & Sons: Chichester, UK, 2018. [Google Scholar]
- Bianchi, F.; De Battista, H.; Mantz, R. Wind Turbine Control Systems. Principles, Modelling and Gain Scheduling Design; Springer: London, UK, 2007. [Google Scholar]
- Kadri, A.; Marzougui, H.; Bacha, F. MPPT control methods in wind energy conversion system using DFIG. In Proceedings of the 4th International Conference on Control Engineering & Information Technology (CEIT), Hammamet, Tunisia, 16–18 December 2016; pp. 1–6. [Google Scholar]
- Zammit, D.; Spiteri Staines, C.; Micallef, A.; Apap, M. MPPT with Current Control for a PMSG Small Wind Turbine in a Grid-Connected DC Microgrid. In Wind Energy Exploitation in Urban Environment; Battisti, L., Ricci, M., Eds.; Springer International Publishing: Berlin/Heidelberg, Germany, 2018; pp. 205–219. [Google Scholar]
- Carbon Trust. Small-Scale Wind Energy: Policy Insights and Practical Guidance; Carbon Trust: London, UK, 2008. [Google Scholar]
- Juma, M.I.; Mwinyiwiwa, B.M.M.; Msigwa, C.J.; Mushi, A.T. Design of a Hybrid Energy System with Energy Storage for Standalone DC Microgrid Application. Energies 2021, 14, 5994. [Google Scholar] [CrossRef]
- Mohamed, S.A.; Tolba, M.A.; Eisa, A.A.; El-Rifaie, A.M. Comprehensive Modeling and Control of Grid-Connected Hybrid Energy Sources Using MPPT Controller. Energies 2021, 14, 5142. [Google Scholar] [CrossRef]
- Al-Quraan, A.; Al-Qaisi, M. Modelling, Design and Control of a Standalone Hybrid PV-Wind Micro-Grid System. Energies 2021, 14, 4849. [Google Scholar] [CrossRef]
- Rolak, M.; Kot, R.; Malinowski, M.; Goryca, Z.; Szuster, J. AC/DC converter with maximum power point tracking algorithm for complex solution of small wind turbine. Prz. Elektrotech. 2011, 87, 91–96. (In Polish) [Google Scholar]
- Shankareppagol, L.; Hampannavar, S.; Doadamani, S. Performance Analysis of P&O and INC MPPT for WECS. In Proceedings of the 3rd International Conference for Convergence in Technology (I2CT), Pune, India, 6–8 April 2018; pp. 1–8. [Google Scholar]
- Baran, J.; Jąderko, A. Układ sterowania turbiny wiatrowej o regulowanej prędkości obrotowej i stałym kącie ustawienia łopat z liniowym obserwatorem momentu aerodynamicznego. Prz. Elektrotech. 2017, 93, 59–62. (In Polish) [Google Scholar] [CrossRef]
- Chudzik, S. Stanowisko pomiarowe do testowania modeli mikroelektrowni wiatrowych. Prz. Elektrotech. 2021, 97, 154–157. (In Polish) [Google Scholar] [CrossRef]
- Schubel, P.; Crossley, R. Wind turbine blade design. Energies 2012, 5, 3425–3449. [Google Scholar] [CrossRef] [Green Version]
- Pande, J.; Nasikkar, P.; Kotecha, K.; Varadarajan, V. A Review of Maximum Power Point Tracking Algorithms for Wind Energy Conversion Systems. J. Mar. Sci. Eng. 2021, 9, 1187. [Google Scholar] [CrossRef]
- Majout, B.; El Alami, H.; Salime, H.; Zine Laabidine, N.; El Mourabit, Y.; Motahhir, S.; Bouderbala, M.; Karim, M.; Bossoufi, B. A Review on Popular Control Applications in Wind Energy Conversion System Based on Permanent Magnet Generator PMSG. Energies 2022, 15, 6238. [Google Scholar] [CrossRef]
- Abdullah, M.A.; Yatim, A.H.M.; Tan, C.W.; Saidur, C.W. A review of maximum power point tracking algorithms for wind energy systems. Renew. Sustain. Energy Rev. 2012, 16, 3220–3227. [Google Scholar]
- Calabrese, D.; Tricarico, G.; Brescia, E.; Cascella, G.L.; Monopoli, V.G.; Leuzzi, R. Variable Structure Control of a Small Ducted Wind Turbine in the Whole Wind Speed Range Using a Luenberger Observer. Energies 2020, 13, 4647. [Google Scholar] [CrossRef]
- Bekiroglu, E.; Yazar, M.D. MPPT Control of Grid Connected DFIG at Variable Wind Speed. Energies 2022, 15, 3146. [Google Scholar] [CrossRef]
- Kim, J.-S.; Chung, I.-Y.; Moon, S.-I. Tuning of the PI controller parameters of a PMSG wind turbine to improve control performance under various wind speeds. Energies 2015, 8, 1406–1425. [Google Scholar] [CrossRef] [Green Version]
- Bubalo, M.; Bašić, M.; Vukadinović, D.; Grgić, I. Experimental Investigation of a Standalone Wind Energy System with a Battery-Assisted Quasi-Z-Source Inverter. Energies 2021, 14, 1665. [Google Scholar] [CrossRef]
- Yaakoubi, A.E.; Amhaimar, L.; Attari, K.; Harrak, M.; Halaoui, M.; Asselman, A. Non-linear and intelligent maximum power point tracking strategies for small size wind turbines: Performance analysis and comparison. Energy Rep. 2019, 5, 545–554. [Google Scholar] [CrossRef]
- Aissaoui, H.E.; Ougli, A.E.; Tidhaf, B. Neural Networks and Fuzzy Logic Based Maximum Power Point Tracking Control for Wind Energy Conversion System. Adv. Sci. Technol. Eng. Syst. J. 2021, 6, 586–592. [Google Scholar] [CrossRef]
- Syahputra, R.; Soesanti, I. Performance Improvement for Small-Scale Wind Turbine System Based on Maximum Power Point Tracking Control. Energies 2019, 12, 3938. [Google Scholar] [CrossRef] [Green Version]
- Priyadarshi, N.; Ramachandaramurthy, V.K.; Padmanaban, S.; Azam, F. An Ant Colony Optimized MPPT for Standalone Hybrid PV-Wind Power System with Single Cuk Converter. Energies 2019, 12, 167. [Google Scholar] [CrossRef] [Green Version]
- Daili, Y.; Gaubert, J.P.; Rahmani, L. Implementation of a new maximum power point tracking control strategy for small wind energy conversion systems without mechanical sensors. Energy Convers. Manag. 2015, 97, 298–306. [Google Scholar] [CrossRef]
- Nandi, T.N.; Brasseur, J.; Vijayakumar, G. Prediction and Analysis of the Nonsteady Transitional Boundary Layer Dynamics for flow over an Oscillating Wind Turbine Airfoil using the γ-Reθ Transition Model. In Proceedings of the 34th Wind Energy Symposium, San Diego, CA, USA, 4–8 January 2016. [Google Scholar] [CrossRef]
- Liu, J.; Xiao, Z.; Fu, S. Unsteady Transition Studies over a Pitching Airfoil Using a k-ω-γ Transition Model. AIAA J. 2018, 56, 3776–3781. [Google Scholar] [CrossRef]

















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chudzik, S. Wind Microturbine with Adjustable Blade Pitch Angle. Energies 2023, 16, 945. https://doi.org/10.3390/en16020945
Chudzik S. Wind Microturbine with Adjustable Blade Pitch Angle. Energies. 2023; 16(2):945. https://doi.org/10.3390/en16020945
Chicago/Turabian StyleChudzik, Stanisław. 2023. "Wind Microturbine with Adjustable Blade Pitch Angle" Energies 16, no. 2: 945. https://doi.org/10.3390/en16020945
APA StyleChudzik, S. (2023). Wind Microturbine with Adjustable Blade Pitch Angle. Energies, 16(2), 945. https://doi.org/10.3390/en16020945