

Varied-Frequency CC–CV Inductive Wireless Power Transfer with Efficiency-Regulated EV Charging for an Electric Golf Cart


 ,
, 
 and
and
Abstract
:1. Introduction
2. Varied Frequency Controlled Inductive Wireless CC–CV Charging for an e-Golf Cart
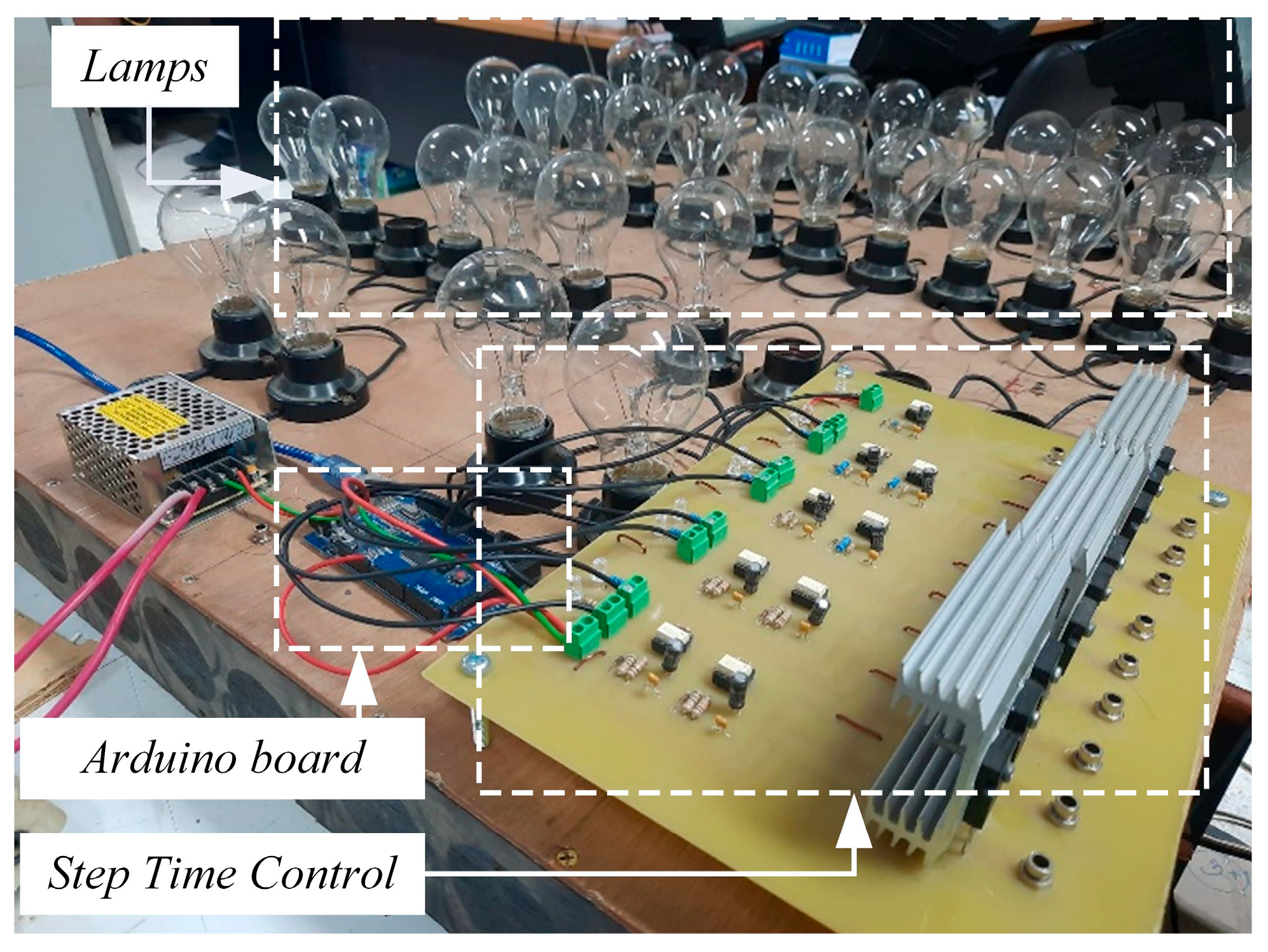
2.1. e-Golf Cart Li-Ion Battery and Stepping-Resistant Load Battery Simulator
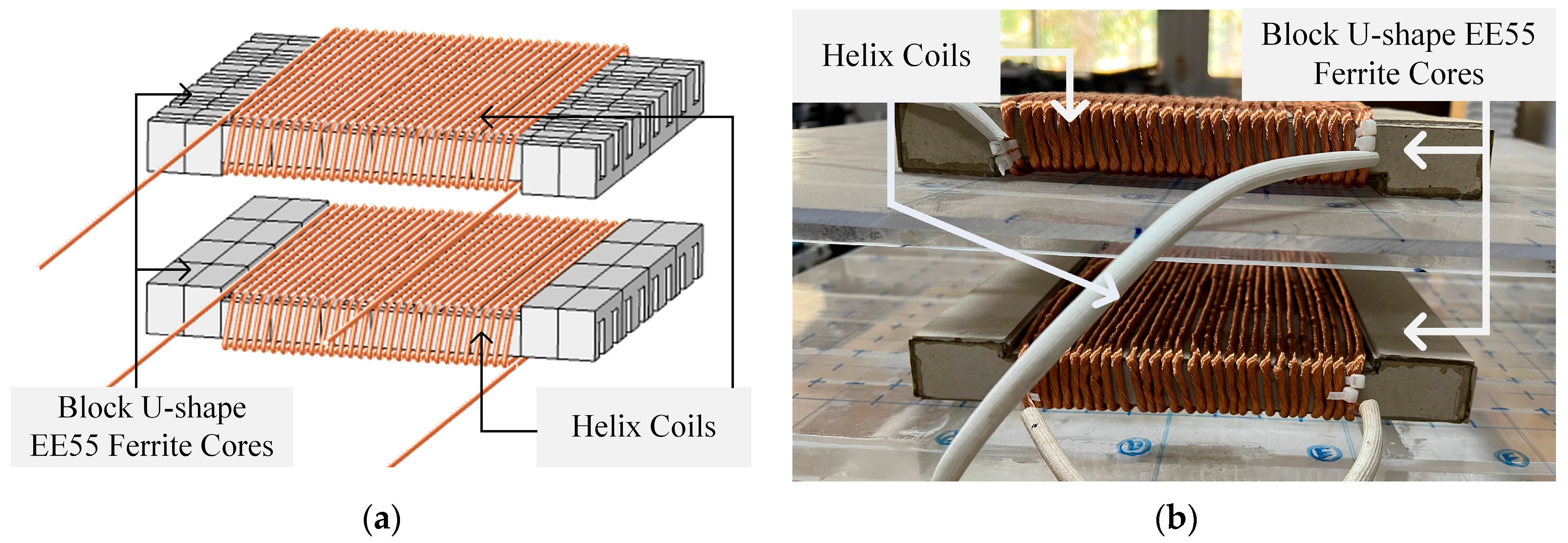
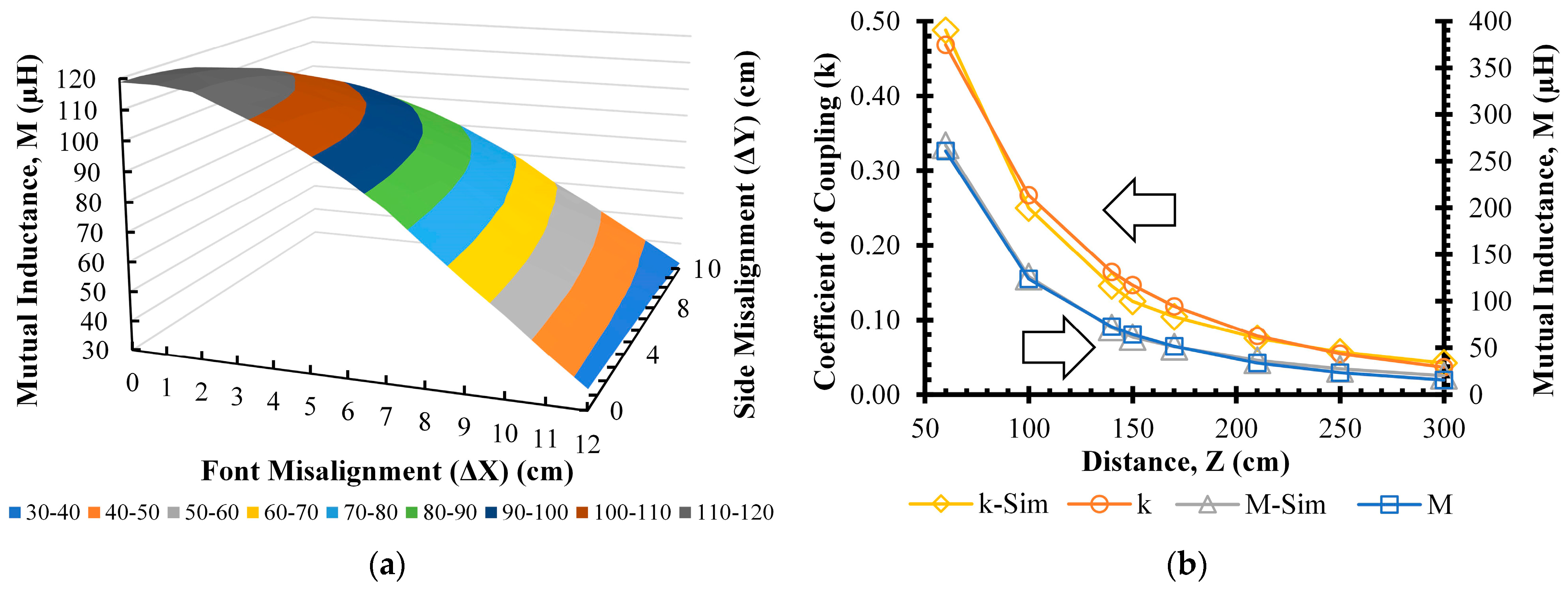
2.2. Inductive Wireless Power Transfer (IPT)
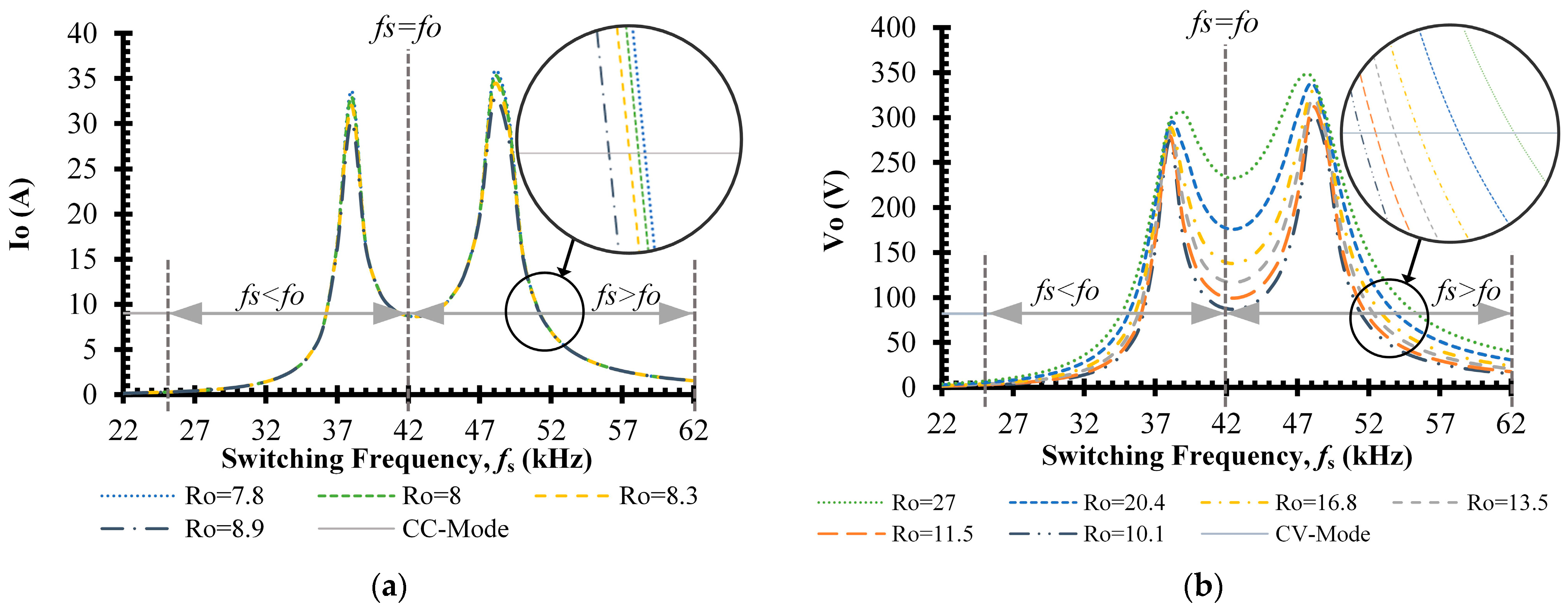
2.3. Variable Frequency CC–CV Control
2.4. Secondary-Side Maximum Efficiency Control (MEC)
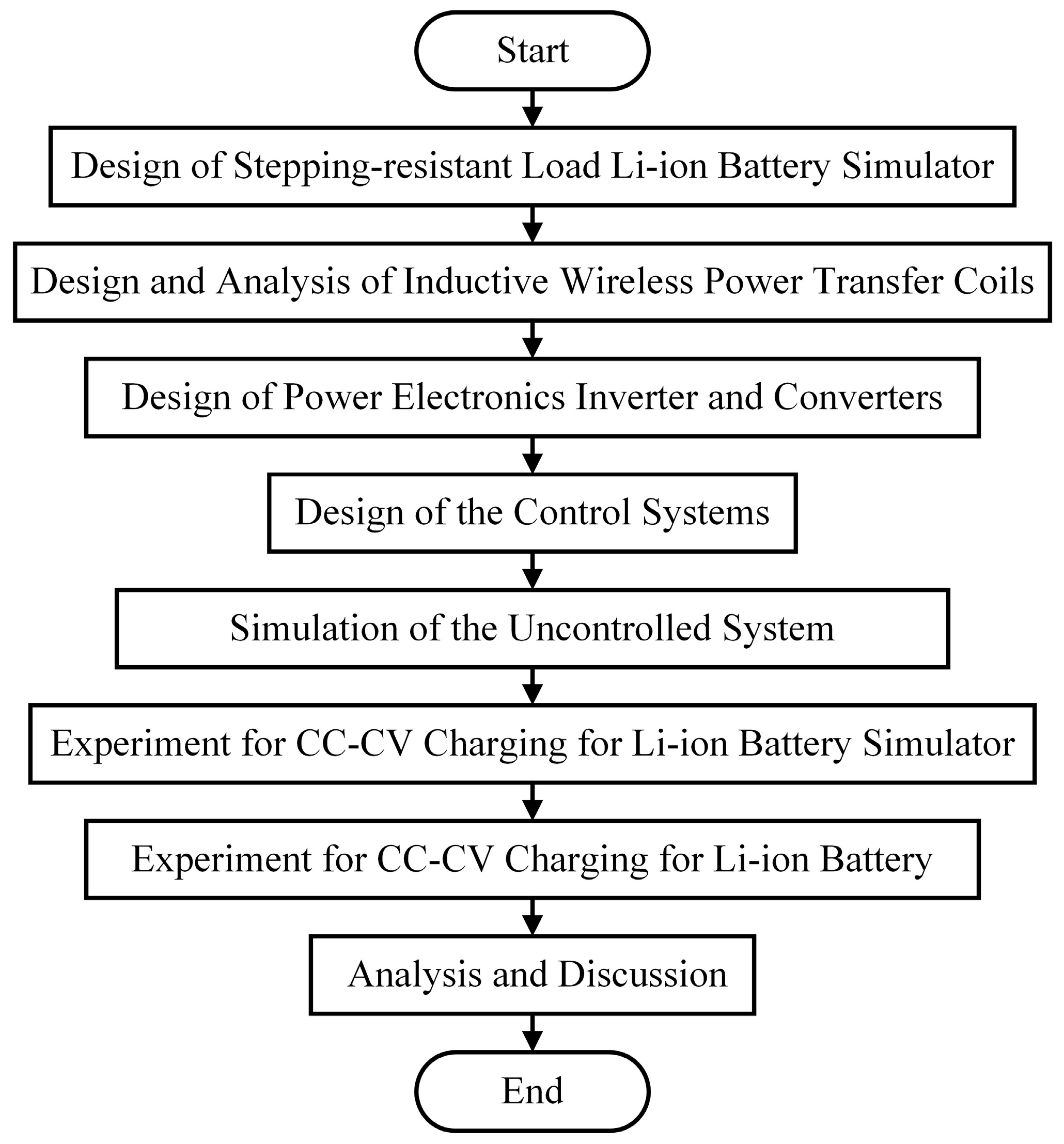
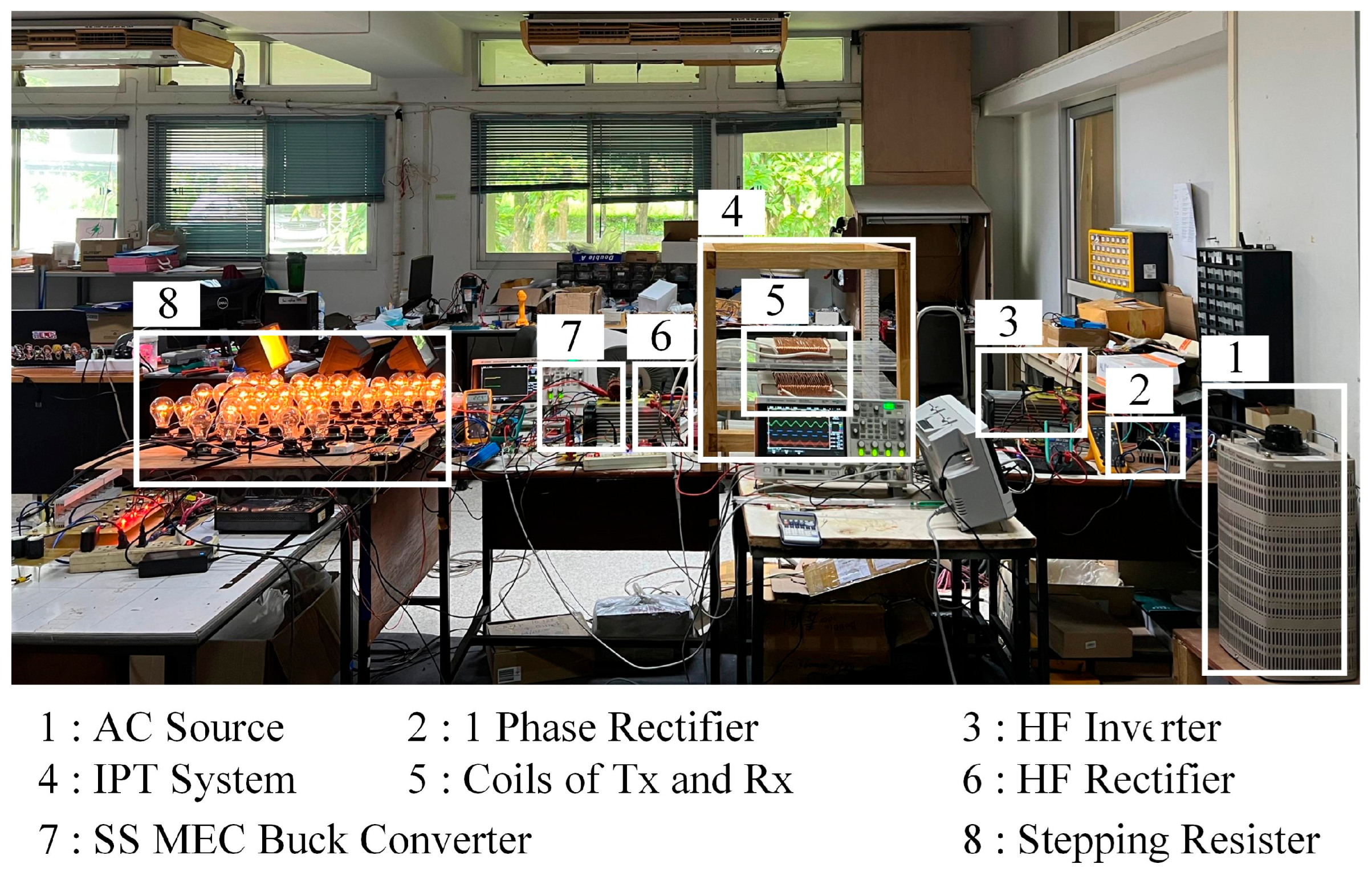
3. Experiments
3.1. Step-Resistant Li-Ion Battery Simulator Design
3.2. IPT Coils Design
3.3. Varied Frequency CC–CV Inverter Design
3.4. Simulation of Uncontrolled Charging
3.5. Simulation of Varied Frequency CC–CV Inductive Charging without and with the SS MEC Converter
3.6. Experiment of Varied Frequency CC–CV Charging without and with the SS MEC for the Step Load Battery Simulator
3.7. Experiment of Variable Frequency CC–CV Charging without and with the SS MEC for the e-Golf Cart Li-Ion Battery System
4. Results and Discussions
4.1. Uncontrolled Charging Simulation Results
4.2. The Wireless CC–CV Charging without and with the MEC at the Offset Simulation Results
4.3. The Wireless CC–CV Charging without and with the SS MEC for the Step Load Battery Simulator Experiment Results
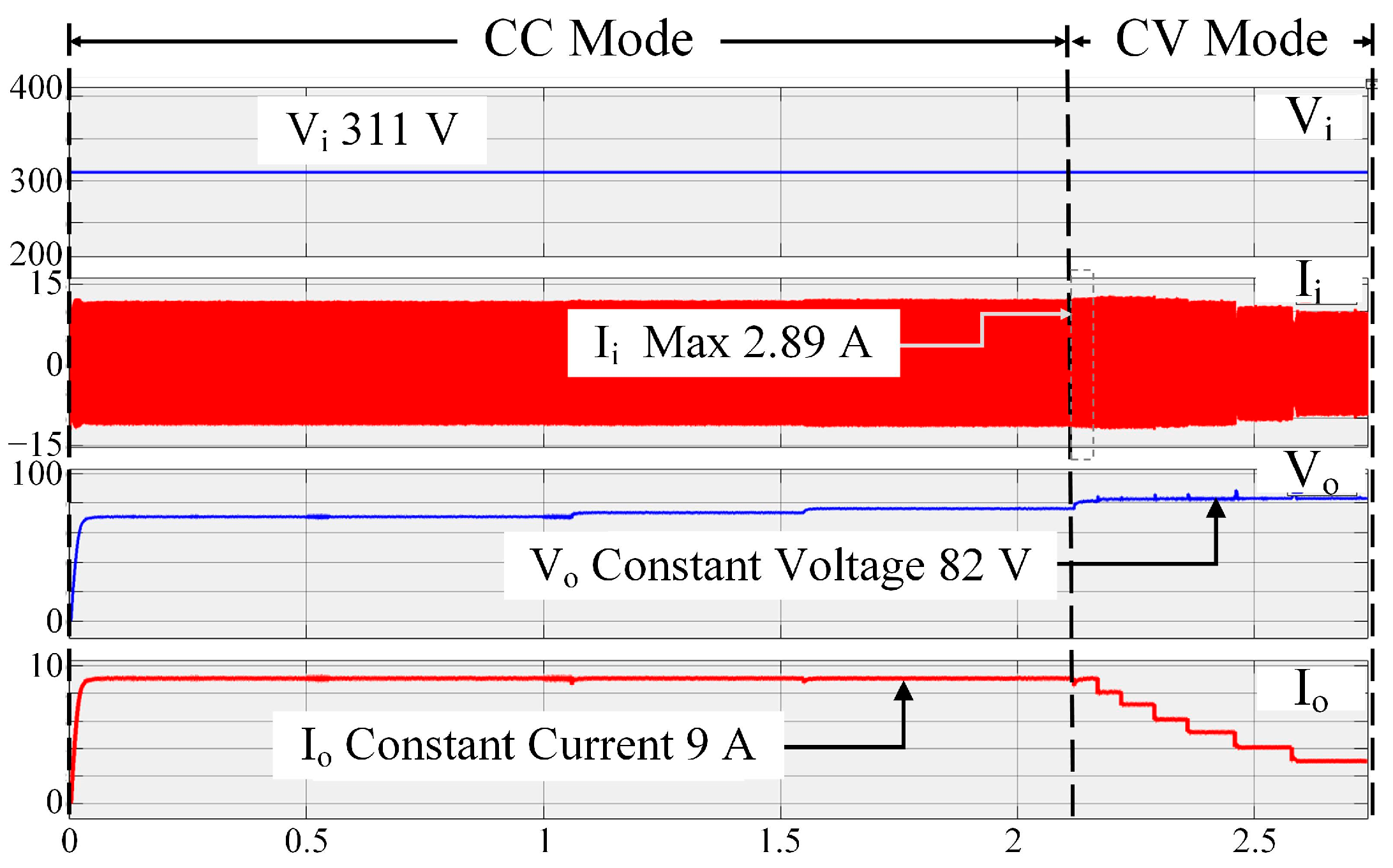
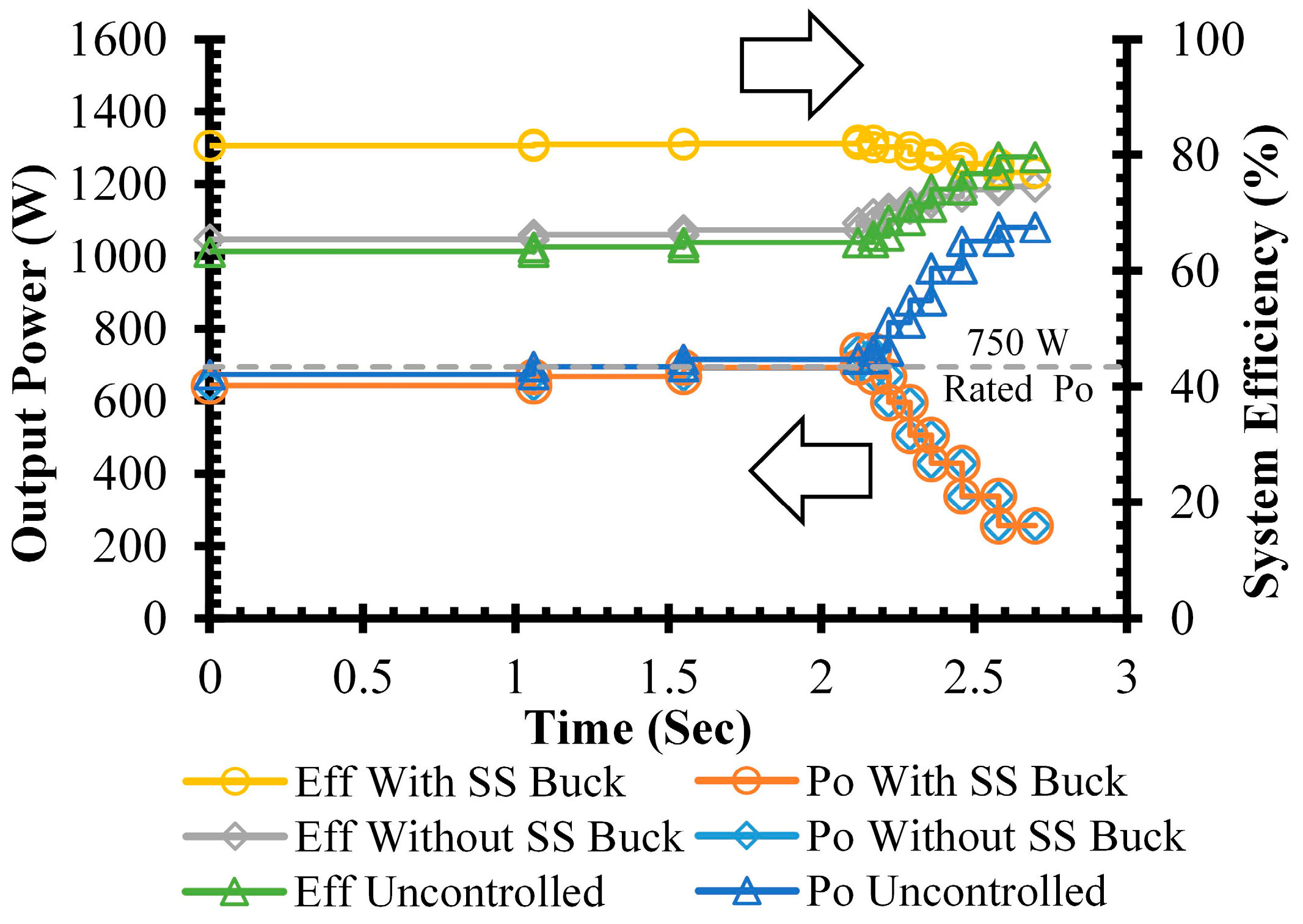
4.4. Experimental Results of the Wireless CC–CV Charging without and with the SS MEC for the e-Golf Cart Li-Ion Battery System
5. Conclusions
- (a)
- CC–CV varied frequency charging with un-control;
- (b)
- CC–CV varied frequency charging without the SS MEC converter; and
- (c)
- CC–CV varied frequency charging with the SS MEC converter, tested for the stepping-resistant load battery simulator and tested for the Li-ion NMC battery.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Deng, F.; Zhang, Y.; Liu, Q.; Xie, J.; Wang, J. Analysis on Wireless Charging Technology of Electric Vehicle. J. Phys. Conf. Ser. 2021, 1876, 012017. [Google Scholar] [CrossRef]
- Sriprom, T.; Namin, A.; Tammawan, W.; Yachiangkam, S.; Janjommanit, S.; Kamnarn, U.; Thongpron, J.; Karnjanapiboon, C.; Thounthong, P.; Takorabet, N. Variable Frequency Control for Constant Current Constant Voltage Inductive Wireless EV Charging System. In Proceedings of the 2022 International Power Electronics Conference (IPEC-Himeji 2022- ECCE Asia), Himeji, Japan, 15–19 May 2022; pp. 1481–1488. [Google Scholar]
- IEA. Global EV Outlook 2022; IEA: Paris, France, 2022; pp. 3–14. [Google Scholar]
- IEA. Securing Clean Energy Technology Supply Chains; IEA: Paris, France, 2022; p. 4. [Google Scholar]
- Welch, D. Inflation Turns EVs Into Luxury Item Threatening Broader Electric Shift. Bloomberg. Available online: https://www.bloomberg.com/news/articles/2022-06-17/inflation-turns-evs-into-luxury-items-threatening-broader-electric-shift (accessed on 13 August 2022).
- Thongpron, J.; Tammawan, W.; Somsak, T.; Tippachon, W.; Oranpiroj, K.; Chaidee, E.; Namin, A. A 10 kW Inductive Wireless Power Transfer Prototype for EV Charging in Thailand. ECTI-EEC 2022, 20, 83–95. [Google Scholar] [CrossRef]
- Kusaka, K.; Kusui, R.; Itoh, J.I.; Sato, D.; Shijo, T.; Obayashi, S.; Ishida, M. A 22kW Three-phase Wireless Power Transfer System in Compliance with CISPR 11 and ICNIRP 2010. IEEJ J. Ind. Appl. J-SRAGE Adv. Publ. 2022, 11, 594–602. [Google Scholar] [CrossRef]
- Imura, T.; Suzuki, K.; Hata, K.; Hori, Y. Comparison of Four Resonant Topologies Based on Unified Design Procedure for Capacitive Power Transfer. IEEJ J. Ind. Appl. 2021, 10, 339–347. [Google Scholar] [CrossRef]
- Namin, A.; Chaidee, E.; Tanang, S.; Chaikam, K.; Jansuya, P. Mutual Impedance Adaptation for Maximum Power Point Tracking on LED TV Wireless Power Transfer Vary with Distance. In Proceedings of the 2018 15th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Chiang Rai, Thailand, 18–21 July 2018; pp. 501–504. [Google Scholar]
- Supapong, N.; Sangswang, N.; Naetiladdanon, S.; Mujjalinvimut, E. A Novel Output Power Control of Wireless Powering Kitchen Appliance System with Free-Positioning Feature. Energies 2018, 11, 1671. [Google Scholar]
- Khan-ngern, W.; Zenkner, H. Wireless power charging on electric vehicles. In Proceedings of the 2014 International Electrical Engineering Congress (iEECON), Chonburi, Thailand, 19–21 March 2014; pp. 1–4. [Google Scholar]
- Nalinnopphakhun, P.; Onreabroy, W.; Kaewpradap, A. Parameter Effects on Induction Coil Transmitter of Wireless Charging System for Small Electric Motorcycle. In Proceedings of the 2018 IEEE International WIE Conference on Electrical and Computer Engineering (WIECON-ECE), Chonburi, Thailand, 14–16 December 2018; pp. 145–148. [Google Scholar]
- Jeebklum, P.; Aodsup, K.; Sumpavakup, C. Development of a Static Wireless Power Transfer System for Electric Bikes. In Proceedings of the 2019 Research, Invention, and Innovation Congress (RI2C), Bangkok, Thailand, 11–13 December 2019; pp. 1–4. [Google Scholar]
- Namin, A.; Chaidee, E.; Prachuabroek, T.; Jumpoo, T.; Thamapanya, N. Solar Tricycle with Lateral Misalignment Maximum Power Point Tracking Wireless Power Transfer. In Proceedings of the 2018 15th International Conference on Electrical Engineering/Electronics Computer Telecommunications and Information Technology (ECTI-CON), Chiang Rai, Thailand, 18–21 July 2018; pp. 656–659. [Google Scholar]
- Jiang, Y.; Wang, L.; Wang, Y.; Liu, J.; Wu, M.; Ning, G. Analysis, Design, and Implementation of WPT System for EV’s Battery Charging Based on Optimal Operation Frequency Range. IEEE Trans. Power Electron. 2019, 34, 6890–6905. [Google Scholar] [CrossRef]
- Hatchavanich, N.; Konghirun, M.; Saengswang, A. LCL—LCCL Voltage Source Inverter with Phase Shift Control for Wireless EV Charger. In Proceedings of the IEEE 12th PEDS Conference 2017, Honolulu, HI, USA, 12–15 December 2017; pp. 297–301. [Google Scholar]
- Rittiplang, A.; Pijitrojana, W.; Daroj, K. Low frequency wireless power transfer using modified parallel resonance matching at a complex load. KKU Eng. J. 2016, 43, 184–188. [Google Scholar]
- Amasiri, W.; Pothong, P.; Pinyathanabat, T.; Pijitrojana, W. Automatic Efficiency Maintaining System for Wireless Power Transfer Using Automatic Resonance Frequency. Thammasat Sci. Technol. J. 2017, 25, 870–879. [Google Scholar]
- Namin, A.; Chaidee, E.; Sriprom, T.; Bencha, P. Performance of Inductive Wireless Power Transfer Between Using Pure Sine Wave and Square Wave Inverters. In Proceedings of the 2018 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Bangkok, Thailand, 6–9 June 2018; pp. 1–5. [Google Scholar]
- Vienglek, P.; Nutwong, S.; Sangswang, A.; Naetiladdanon, S.; Mujjalinvimut, E. Comparative Study of Magnetically Coupled Coil Used in Dynamic Wireless Battery Charger for Electric Vehicles. In Proceedings of the 2020 23rd International Conference on Electrical Machines and Systems (ICEMS), Hamamatsu, Japan, 24–27 November 2020; pp. 1775–1778. [Google Scholar]
- Kim, H.; Song, C.; Kim, D.H.; Jung, D.H.; Kim, I.M.; Kim, Y.I.; Kim, J.; Ahn, S.; Kim, J. Coil Design and Measurements of Automotive Magnetic Resonant Wireless Charging System for High-Efficiency and Low Magnetic Field Leakage. IEEE Trans. Microw. Theory Tech. 2016, 64, 383–400. [Google Scholar] [CrossRef]
- Afshin, M.; Rathore, A.K. Receiver Side Control for Efficient Inductive Power Transfer for Vehicle Recharging. In Proceedings of the 2017 IEEE Transportation Electrification Conference (ITEC-India), Pune, India, 13–15 December 2017; pp. 1–6. [Google Scholar]
- Yachiangkam, S.; Tammawan, W.; Sriprom, T.; Thongpron, J.; Kamnarn, U.; Oranpiroj, K.; Somsak, T.; Yotkaew, E.; Namin, A. Wireless Golf Cart Charging Development in Thailand 2022. In Proceedings of the International Electrical Engineering Congress (IEECON), Khon Kaen, Thailand, 9–11 March 2022; pp. 1–4. [Google Scholar]
- EVAT. Electric Tuk Tuk Conversion. Electric Vehicle Association of Thailand (EVAT). Available online: https://www.evat.or.th/16927808/electric-tuk-tuk-conversion (accessed on 13 August 2022).
- Liu, J.; Deng, Q.; Wang, W.; Li, Z. Modeling and Control of Inverter Zero-Voltage-Switching for Inductive Power Transfer System. IEEE Access 2019, 7, 139885–139894. [Google Scholar] [CrossRef]
- Zhu, H.; Zhang, B.; Wu, L. Output Power Stabilization for Wireless Power Transfer System Employing Primary-Side-Only Control. IEEE Access 2020, 8, 63735–63747. [Google Scholar] [CrossRef]
- Song, K.; Li, Z.; Jiang, J.; Zhu, C. Constant Current/Voltage Charging Operation for Series–Series and Series–Parallel Compensated Wireless Power Transfer Systems Employing Primary-Side Controller. IEEE Trans. Power Electron. 2018, 33, 8065–8080. [Google Scholar] [CrossRef]
- Chen, C.; Zhou, H.; Deng, Q.; Hu, W.; Yu, Y.; Lu, X.; Lai, J. Modeling and Decoupled Control of Inductive Power Transfer to Implement Constant Current/Voltage Charging and ZVS Operating for Electric Vehicles. IEEE Access 2018, 6, 59917–59928. [Google Scholar] [CrossRef]
- Liu, Y.; Feng, H. Maximum Efficiency Tracking Control Method for WPT System Based on Dynamic Coupling Coefficient Identification and Impedance Matching Network. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 3633–3643. [Google Scholar] [CrossRef]
- Liu, F.; Chen, K.; Zhao, Z.; Li, K.; Yuan, L. Transmitter-Side Control of Both the CC and CV Modes for the Wireless EV Charging System With the Weak Communication. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 955–965. [Google Scholar] [CrossRef]
- Lee, S.-W.; Choi, Y.-G.; Kim, J.-H.; Kang, B. Wireless Battery Charging Circuit Using Load Estimation without Wireless Communication. Energies 2019, 12, 4489. [Google Scholar] [CrossRef]
- Zhu, X.; Zhao, X.; Li, Y.; Liu, S.; Yang, H.; Tian, J.; Hu, J.; Mai, R.; He, Z. High-efficiency WPT System for CC/CV Charging Based on Double-half-bridge Inverter Topology with Variable Inductors. IEEE Trans. Power Electron. 2022, 37, 2437–2448. [Google Scholar] [CrossRef]
- Li, Y.; Liu, S.; Zhu, X.; Hu, J.; Zhang, M.; Mai, R.; He, Z. Extension of ZVS Region of Series–Series WPT Systems by an Auxiliary Variable Inductor for Improving Efficiency. IEEE Trans. Power Electron. 2021, 36, 7513–7525. [Google Scholar] [CrossRef]
- Wu, L.; Zhang, B.; Jiang, Y. Position-Independent Constant Current or Constant Voltage Wireless Electric Vehicles Charging System Without Dual-Side Communication and DC–DC Converter. IEEE Trans. Ind. Electron. 2022, 69, 7930–7939. [Google Scholar] [CrossRef]
- Zhang, M.; Tan, L.; Li, J.; Huang, X. The Charging Control and Efficiency Optimization Strategy for WPT System Based on Secondary Side Controllable Rectifier. IEEE Access 2020, 8, 127993–128004. [Google Scholar] [CrossRef]
- Yue, R.; Wang, C.; Li, H.; Liu, Y. Constant-Voltage and Constant-Current Output Using P-CLCL Compensation Circuit for Single-Switch Inductive Power Transfer. IEEE Trans. Power Electron. 2021, 36, 5181–5190. [Google Scholar] [CrossRef]
- Ota, R.; Nugroho, D.S.; Hoshi, N. Efficiency Maximization of Inductive Power Transfer System by Impedance and Switching Frequency Control in Secondary-side Converter. In Proceedings of the 2018 International Power Electronics Conference (IPEC-Niigata 2018-ECCE Asia), Niigata, Japan, 20–24 May 2018; pp. 3855–3862. [Google Scholar]
- Matsumoto, R.; Fujimoto, H. Adaptive Compensation Scheme for Wireless Power Transfer Systems with Coil Inductance Variation Using PWM-Controlled Switched Capacitor. In Proceedings of the Wireless Power Week (WPW), Bordeaux, France, 5–8 July 2022; pp. 244–248. [Google Scholar]
- Li, Y.; Hu, J.; Chen, F.; Li, Z.; He, Z.; Mai, R. Dual-Phase-Shift Control Scheme With Current-Stress and Efficiency Optimization for Wireless Power Transfer Systems. IEEE Trans. Circuits Syst. 2018, 65, 3110–3121. [Google Scholar] [CrossRef]
- Xu, S.; Jiang, W.; Hashimoto, S. Analysis and Design of an Air-Coupled DC Transformer with a Hybrid Modulation Control Method. Energies 2019, 12, 2570. [Google Scholar] [CrossRef]
- Mai, R.; Liu, Y.; Li, Y.; Yue, P.; Cao, G.; He, Z. An Active-Rectifier-Based Maximum Efficiency Tracking Method Using an Additional Measurement Coil for Wireless Power Transfer. IEEE Trans. Power Electron. 2018, 33, 716–728. [Google Scholar] [CrossRef]
- Zhao, Q.; Wang, A.; Liu, J.; Wang, X. The Load Estimation and Power Tracking Integrated Control Strategy for Dual-Sides Controlled LCC Compensated Wireless Charging System. IEEE Access 2019, 7, 75749–75761. [Google Scholar] [CrossRef]
- Iam, I.W.; Hoi, I.U.; Huang, Z.; Gong, C.; Lam, C.S.; Mak, P.I.; Martins, R.P.D.S. Constant-Frequency and Noncommunication-Based Inductive Power Transfer Converter for Battery Charging. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 2147–2162. [Google Scholar] [CrossRef]
- Yue, K.; Zhong, W.; Xu, D. A Frequency Tuning Series-Series WPT System with Wide Coupling and Load Ranges. In Proceedings of the IEEE 1st International Power Electronics and Application Symposium (PEAS), Shanghai, China, 13–15 November 2021; pp. 1–6. [Google Scholar]
- Van-Binh, V.; Van-Tuan, D.; Van-Long, P.; Woojin, C. A new method to implement the constant Current-Constant Voltage charge of the Inductive Power Transfer system for Electric Vehicle applications. In Proceedings of the 2016 IEEE Transportation Electrification Conference and Expo Asia-Pacific (ITEC Asia-Pacific), Busan, Republic of Korea, 1–4 June 2016; pp. 449–453. [Google Scholar]
- IEC 61980-1: 2020; Electric Vehicle Wireless Power Transfer (WPT) Systems-Part 1: General Requirement. IEC Standards: Paris, France, 2020; 88p.
- IEC 61980-3: 2022; Electric Vehicle Wireless Power Transfer (WPT) Systems-Part 3: Specific Requirement for Magnetic Field Wireless Power Transfer Systems. IEC Standards: Paris, France, 2022; 239p.
- SAE J2954-2016; Wireless Power Transfer for Light Duty Plug-in/ Electric Vehicles and Alignment Methodology. SAE International: Warrendale, PA, USA, 2016; 115p.
- Aditya, K.; Williamson, S. Linearization and Control of Series-Series Compensated Inductive Power Transfer System Based on Extended Describing Function Concept. Energies 2016, 9, 962. [Google Scholar] [CrossRef]
- Chen, P.-H.; Li, C.; Dong, Z.; Priestley, M. Inductive Power Transfer Battery Charger with IR-Based Closed-Loop Control. Energies 2022, 15, 8319. [Google Scholar] [CrossRef]






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Vi (V) | 311 | L1 (μH) | 436.8 |
| M (μH) | 108.6 | L2 (μH) | 454.9 |
| R1 (Ω) | 0.185 | C1 (μF) | 32.0 |
| R2 (Ω) | 0.9 | C2 (μF) | 31.9 |
| Lb1 (μH) | 600 | Cb1 (μF) | 110 |
| Ro-CC (Ω) | 7.8–8.9 | Ro-CV (Ω) | 10.2–26.6 |
| fs-CC V 311 V (kHz) | 50.3–50.6 | fs-CV Vi 311 V (kHz) | 50.7–54.6 |
| fs-CC Vi 155 V (kHz) | 44.1–44.5 | fs-CV V 155 V (kHz) | 44.6–46 |
| Topology | Reference | Control Method | Compensation Network | Coupling Coefficient, k | Load Resistance | Output Power | Maximum Efficiency |
|---|---|---|---|---|---|---|---|
| PS Buck Converter | [21] | Voltage Transfer | S-S | 0.17 | Battery | 1 kW | 96% |
| PS Buck Converter | [23] | CC | S-S | 0.11 | Battery | 400 W | 80% |
| SS Controllable Rectifier | [35] | CC–CV with Maximum Efficiency Track | LCL-LCL | 0.2 | 5–30 Ω | 1.22 kW | 90% |
| Dual Side Phase-Shift Control | [43] | CC–CV | S-S | 0.255 | 20–355 Ω | 720 W | 93% |
| Varied Frequency Control | [45] | CC–CV | LCC-LCC | 0.26 | 15–140 Ω | 6.6 kW | 96% |
| Asymmetrical Clamped mode (ACM) Control | [49] | Constant Voltage | S-S | 0.2 | 7.84 | 3.6 kW | 90% |
| Hybrid Resonant Compensation, Closed-Loop Control | [50] | CC–CV | Hybrid Resonant Compensation | N/A | Battery | 600 W | 91.4% |
| Varied Frequency Control via Wireless Communications with SS MEC Converter | This work | CC–CV with Maximum Efficiency Track | S-S | 0.16–0.26 | 7.6–27 Ω and Li-ion Battery | 750 W | 76–87% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Thongpron, J.; Kamnarn, U.; Namin, A.; Sriprom, T.; Chaidee, E.; Janjornmanit, S.; Yachiangkam, S.; Karnjanapiboon, C.; Thounthong, P.; Takorabet, N. Varied-Frequency CC–CV Inductive Wireless Power Transfer with Efficiency-Regulated EV Charging for an Electric Golf Cart. Energies 2023, 16, 7388. https://doi.org/10.3390/en16217388
Thongpron J, Kamnarn U, Namin A, Sriprom T, Chaidee E, Janjornmanit S, Yachiangkam S, Karnjanapiboon C, Thounthong P, Takorabet N. Varied-Frequency CC–CV Inductive Wireless Power Transfer with Efficiency-Regulated EV Charging for an Electric Golf Cart. Energies. 2023; 16(21):7388. https://doi.org/10.3390/en16217388
Chicago/Turabian StyleThongpron, Jutturit, Uthen Kamnarn, Anon Namin, Thanet Sriprom, Ekkachai Chaidee, Suchart Janjornmanit, Samart Yachiangkam, Chanyut Karnjanapiboon, Phatiphat Thounthong, and Noureddine Takorabet. 2023. "Varied-Frequency CC–CV Inductive Wireless Power Transfer with Efficiency-Regulated EV Charging for an Electric Golf Cart" Energies 16, no. 21: 7388. https://doi.org/10.3390/en16217388
APA StyleThongpron, J., Kamnarn, U., Namin, A., Sriprom, T., Chaidee, E., Janjornmanit, S., Yachiangkam, S., Karnjanapiboon, C., Thounthong, P., & Takorabet, N. (2023). Varied-Frequency CC–CV Inductive Wireless Power Transfer with Efficiency-Regulated EV Charging for an Electric Golf Cart. Energies, 16(21), 7388. https://doi.org/10.3390/en16217388