


Enhanced Dual–Vector Model Predictive Control for PMSM Drives Using the Optimal Vector Selection Principle

 ,
, 
 and
and 
Abstract
:1. Introduction
- Analyzing the limitation of using adjacent vectors as seen in the existing DV–MPC methods in the literature.
- Proposing an enhanced DV–MPC technique considering two arbitrary vector combinations with the improvement in terms of the steady–state as well as the dynamic control performance.
- Proposing a method to quickly determine the sector by only three calculations.
- To validate the effectiveness of the proposed method, it is compared with the existing SV–MPC method and the DV–MPC methods in the literature.
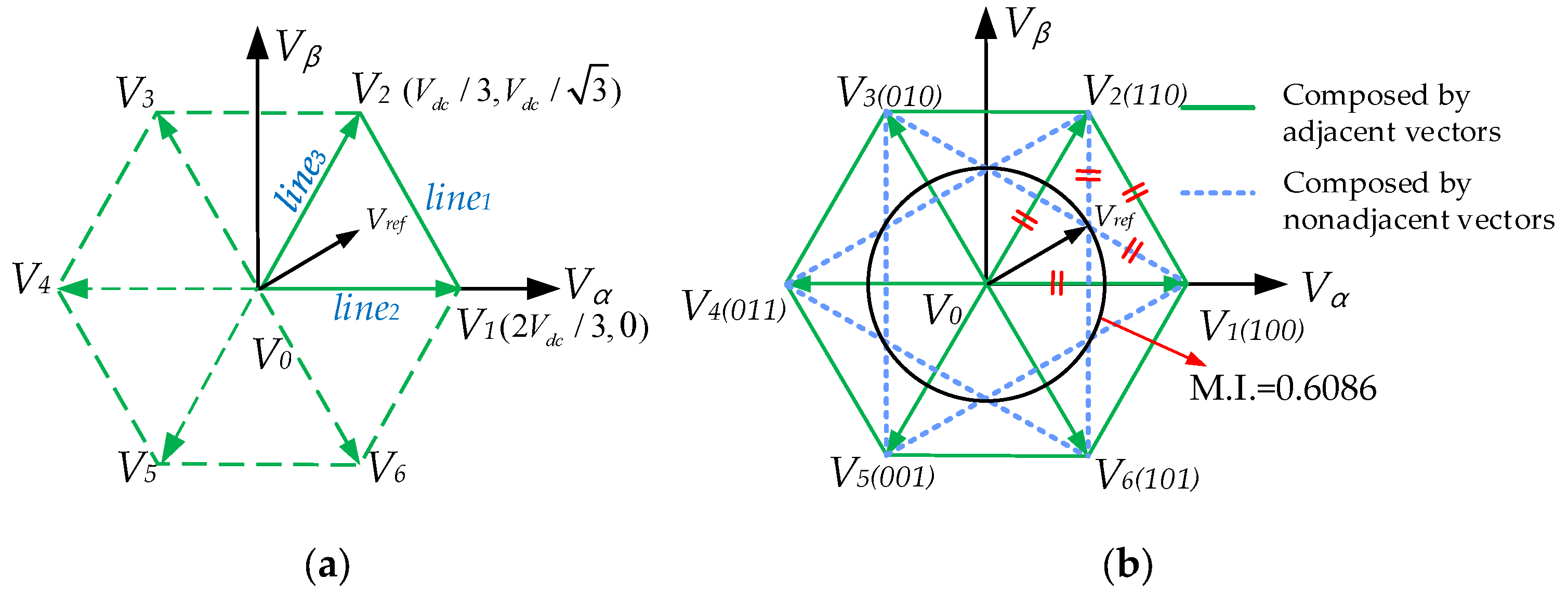
2. Dual–Vector MPC Principle and Its Limitation
2.1. Working Principle
2.2. Limitation Discussion
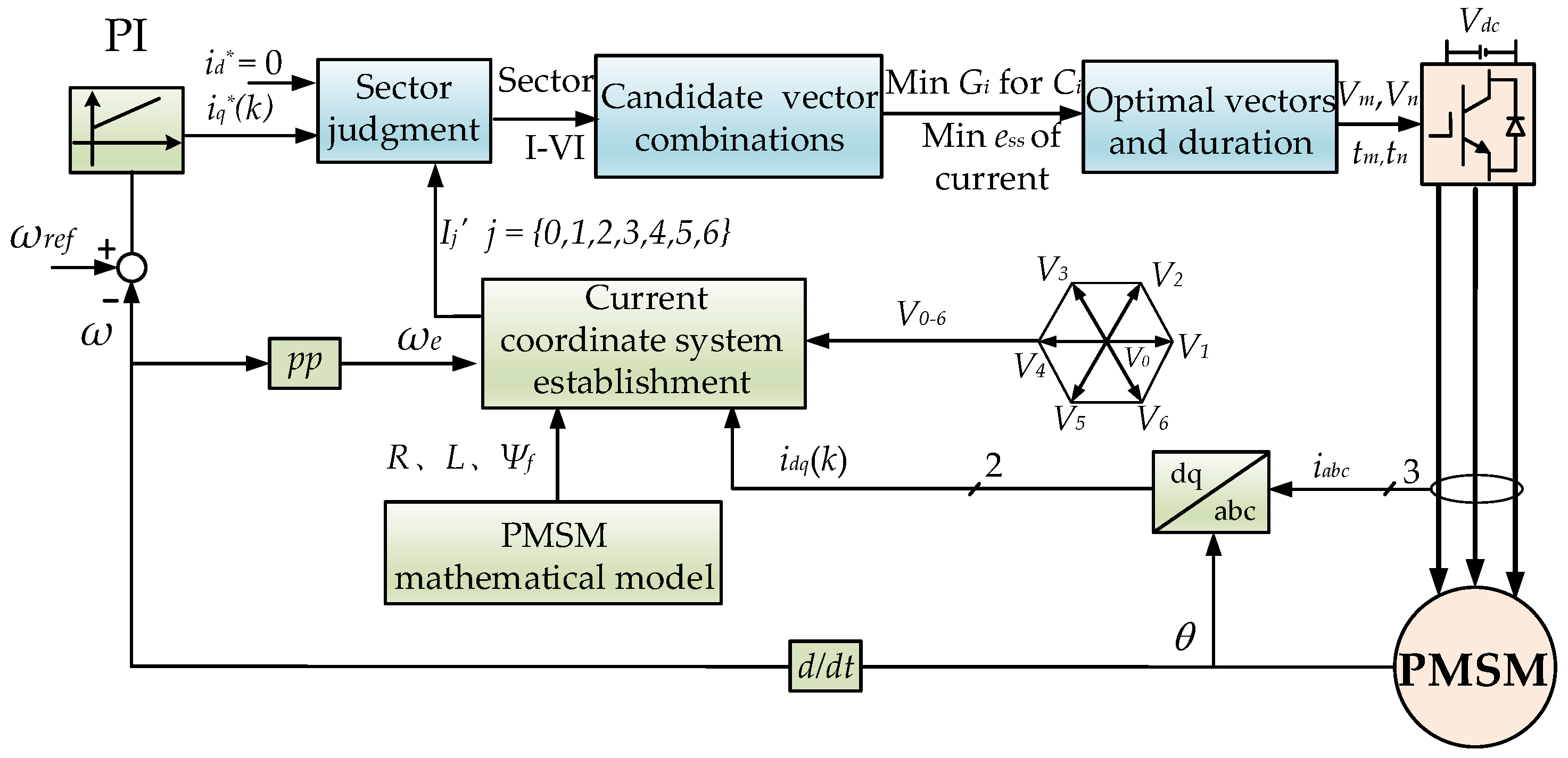
3. Proposed DV–MPC Technique
3.1. Control Block Diagram of the Proposed Method
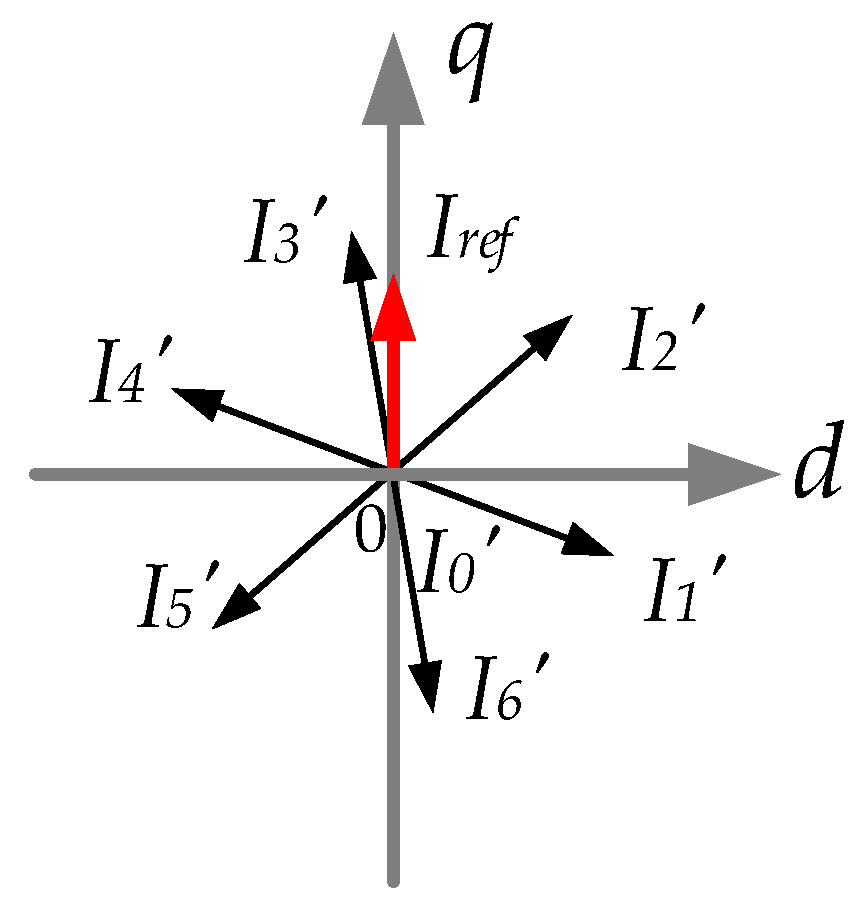
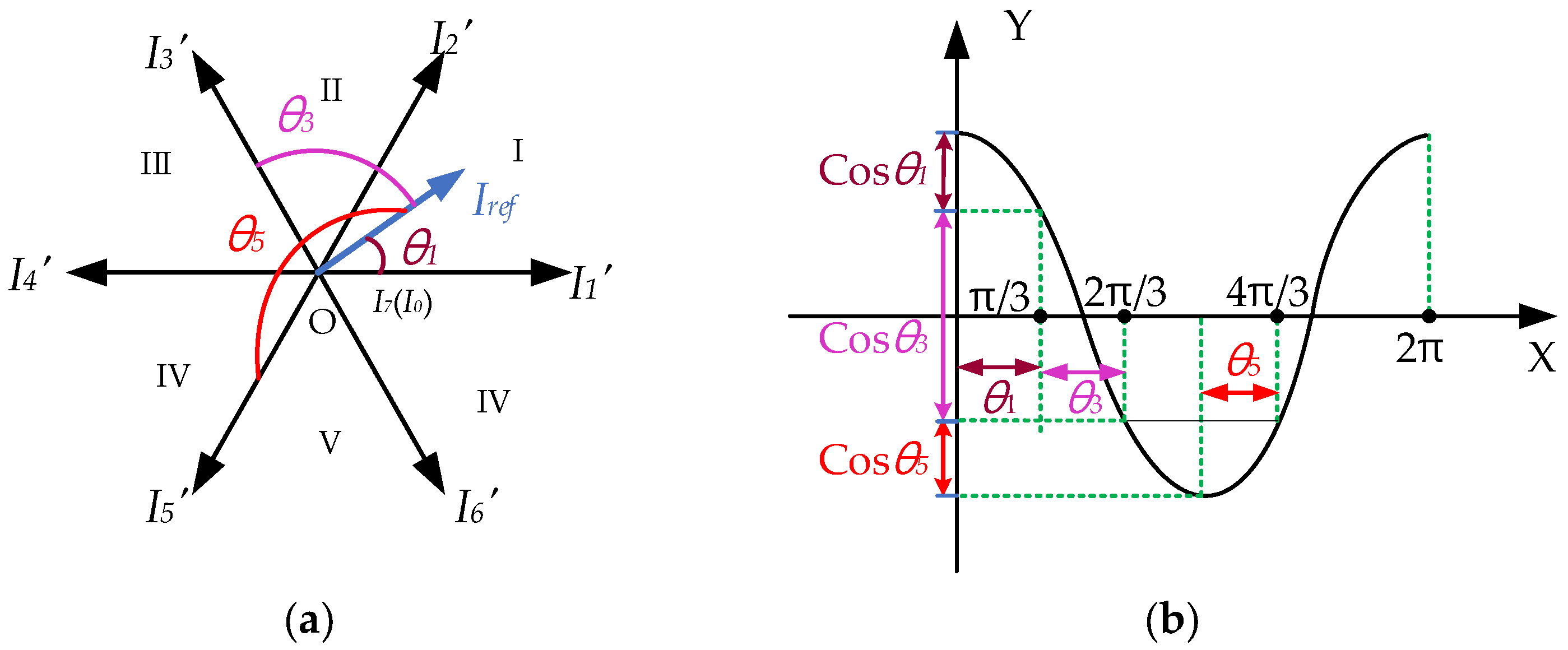
3.2. Current Coordinate System Establishment
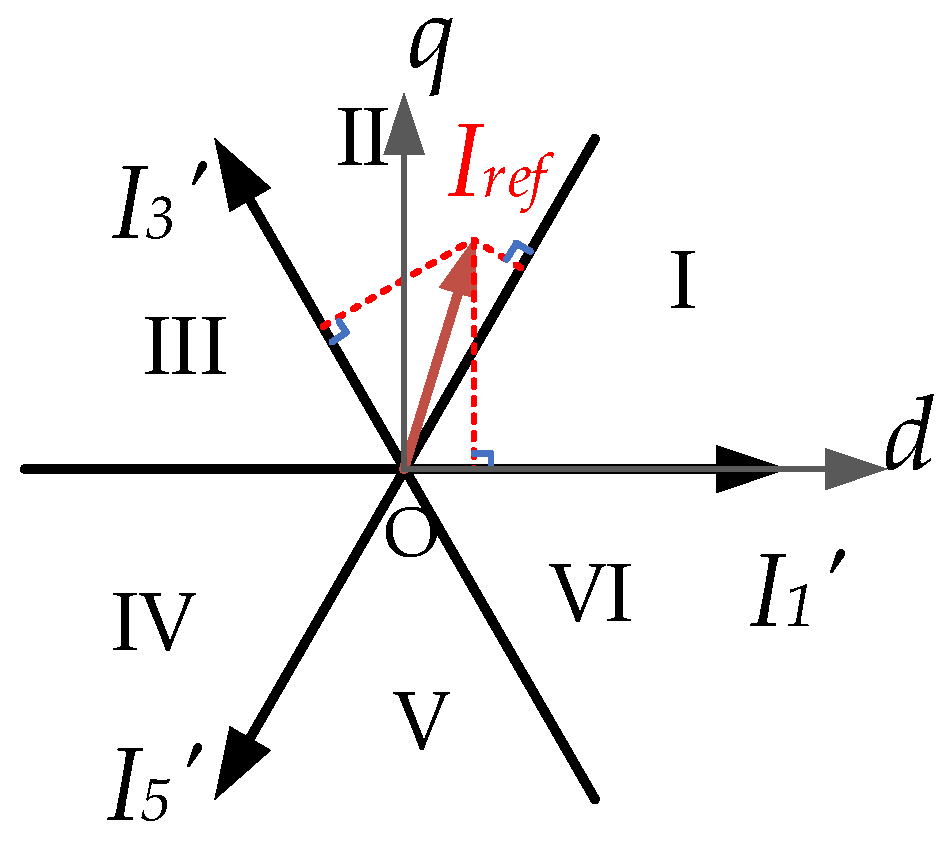
3.3. Sector Determination
3.4. Vectors Selection and Action Time Calculation
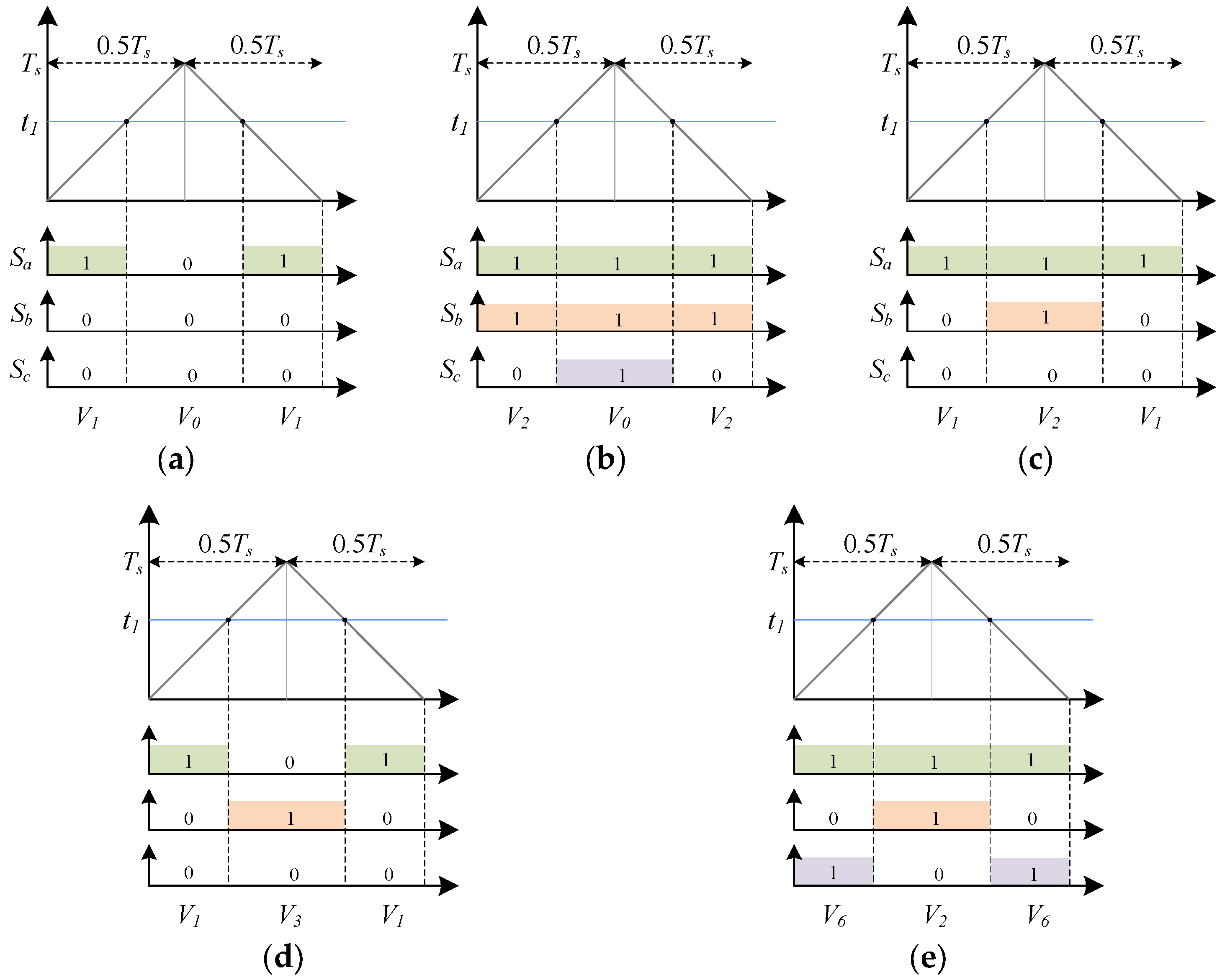
3.5. Relationship of Action Time and Gate Signal
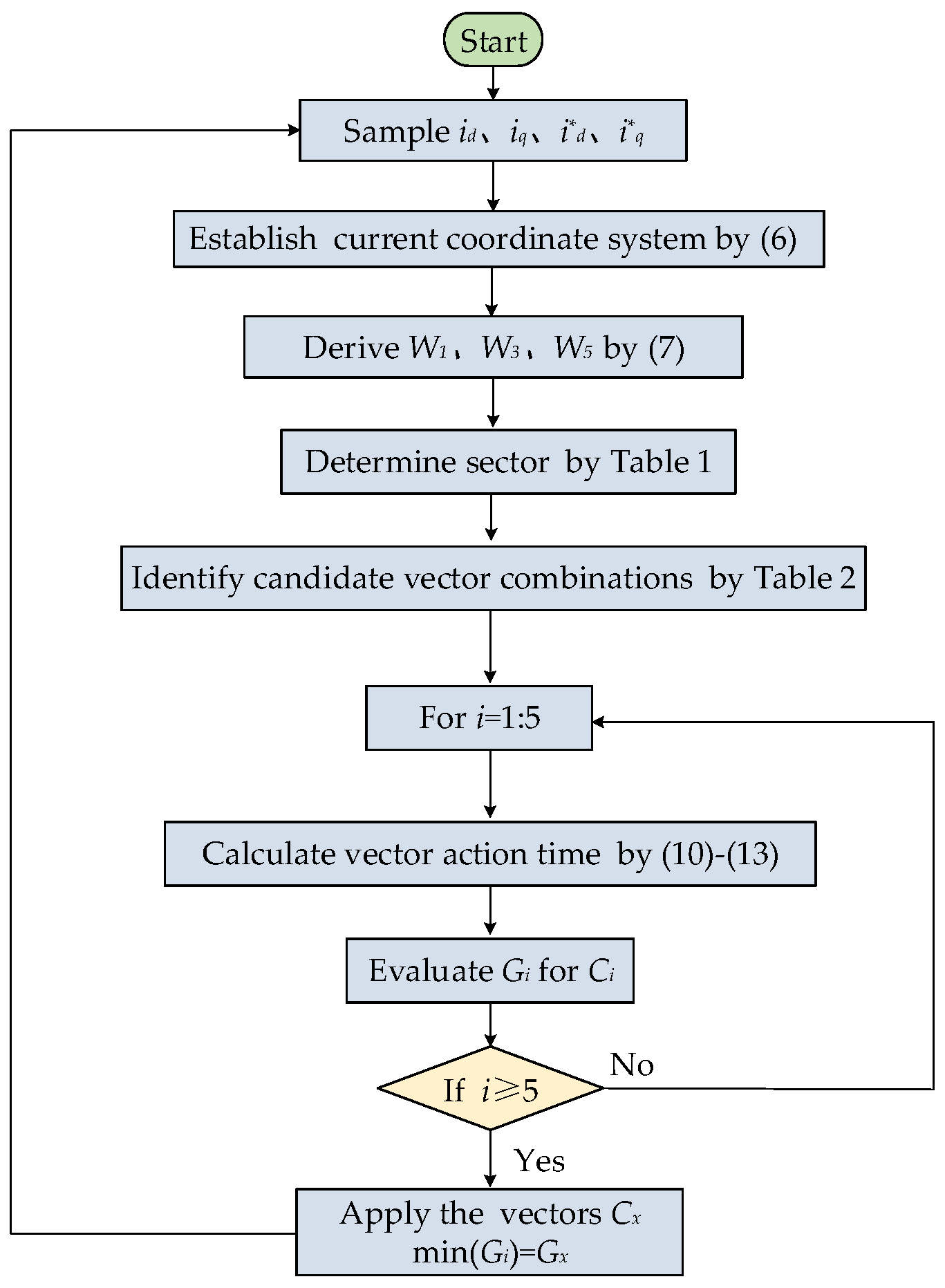
3.6. Process of the Proposed Method
4. Validation Results
4.1. Computational Time
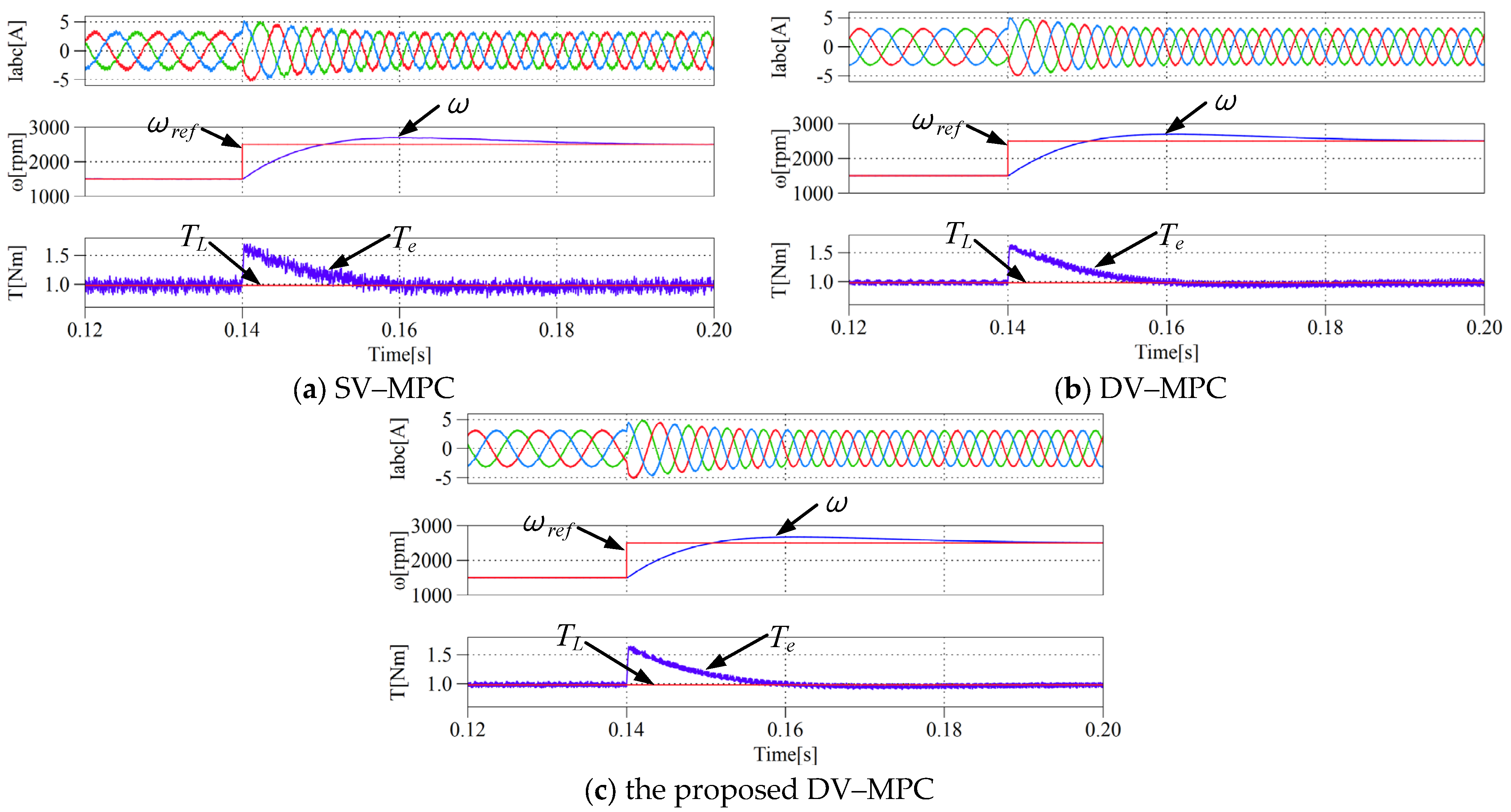
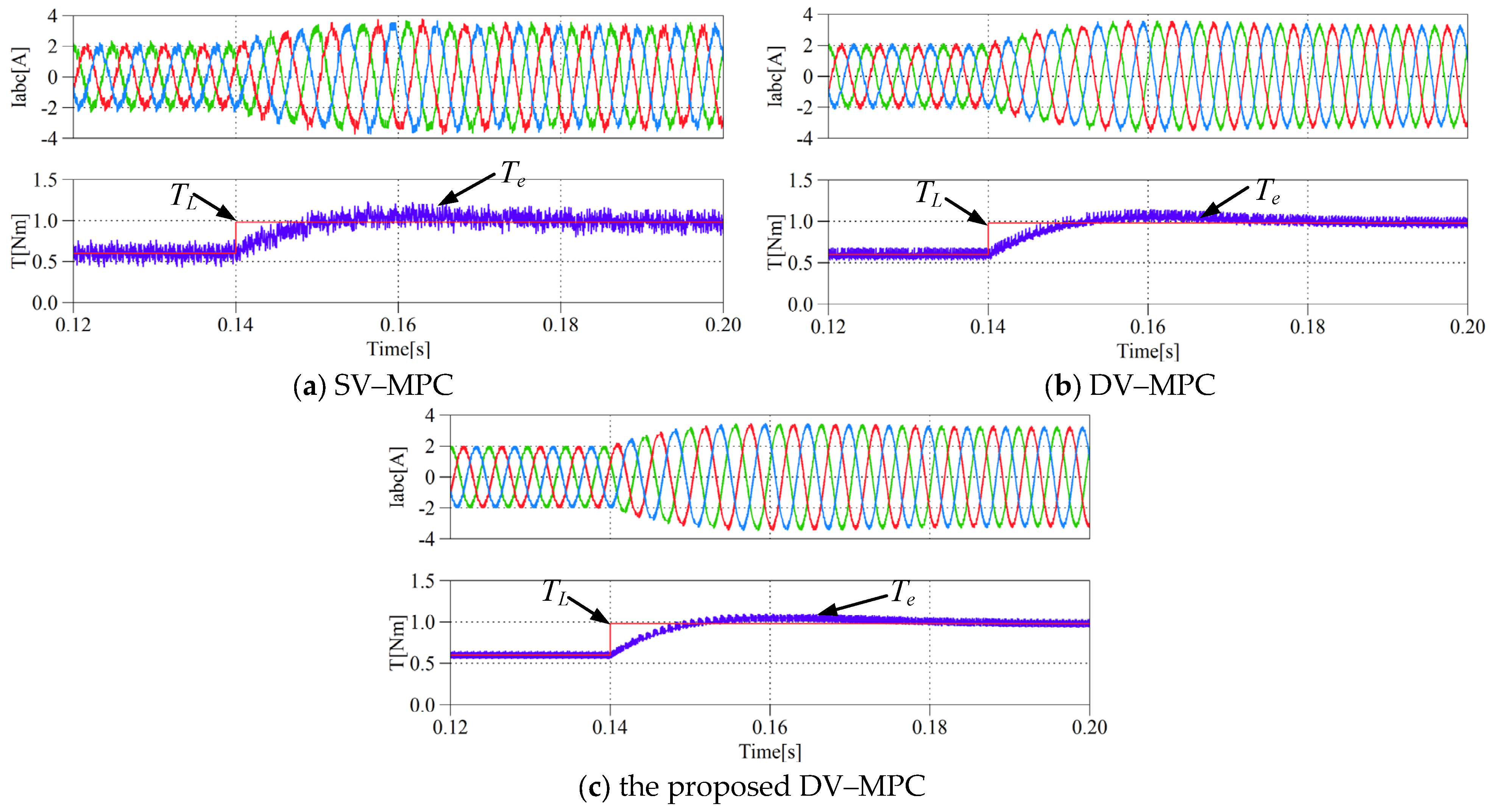
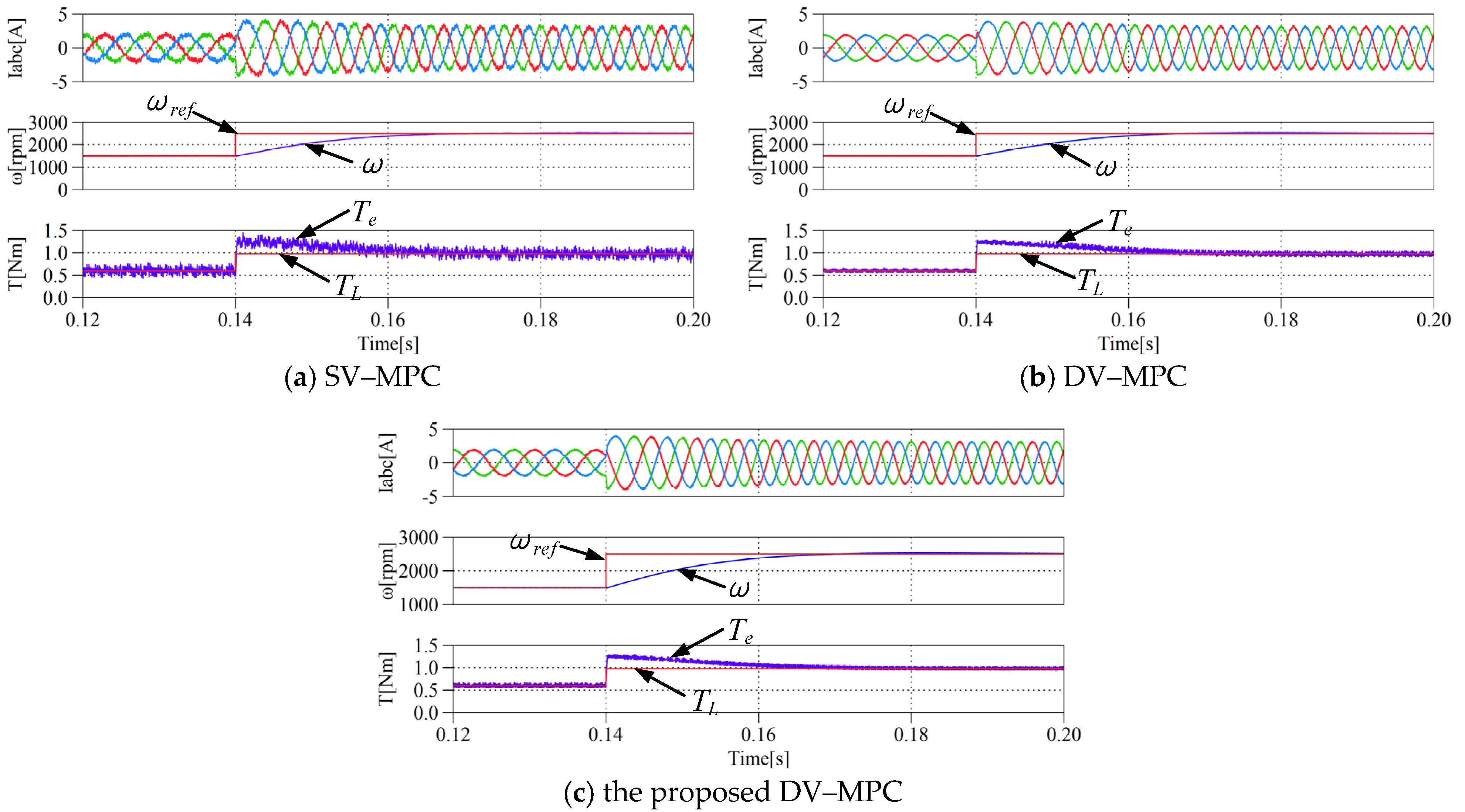
4.2. Dynamic Performance Comparison
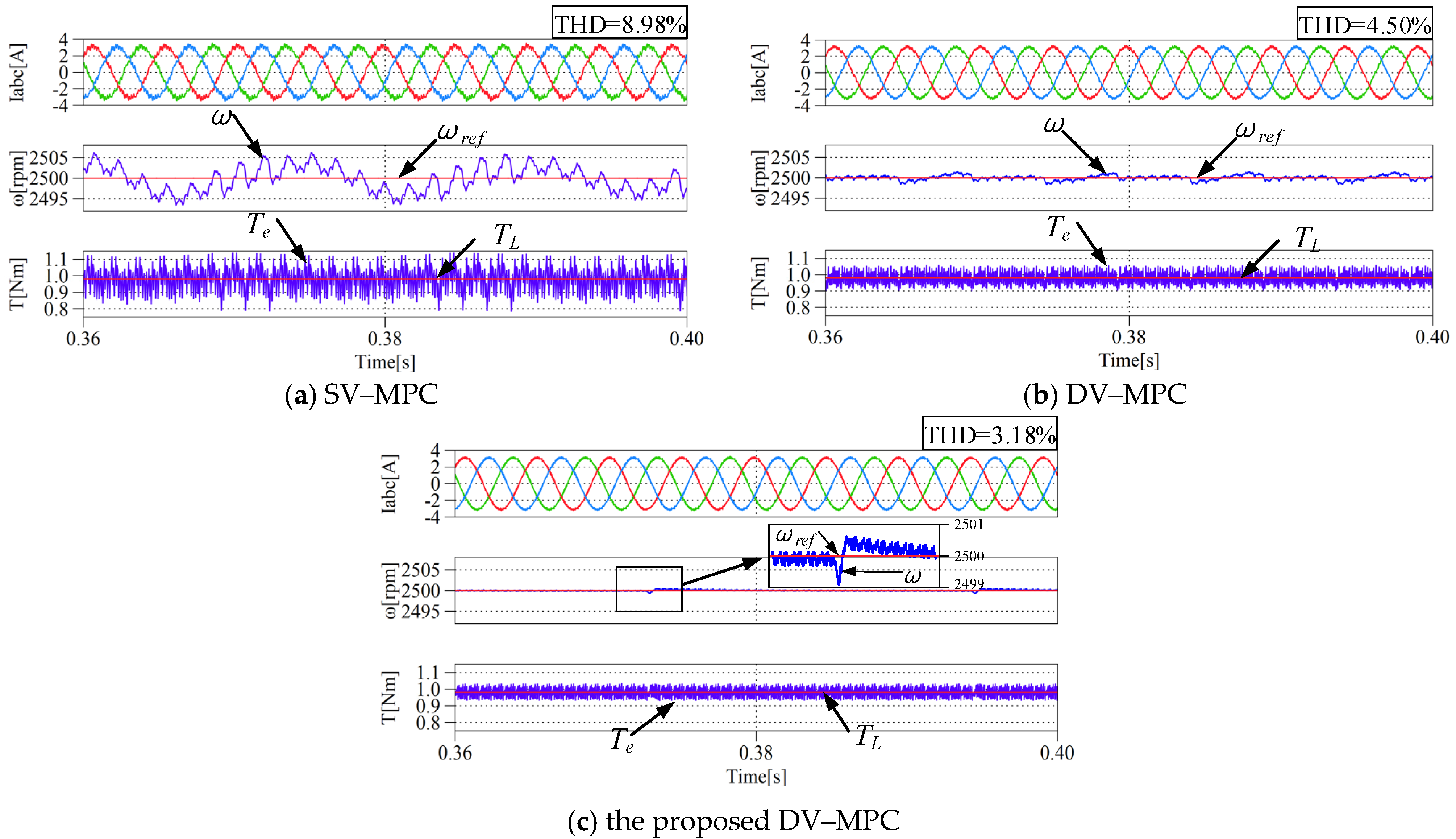
4.3. Steady–State Performance Comparison
4.4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, H.; Kou, B.; Zhang, L. Design and Analysis of a Stator Field Control Permanent Magnet Synchronous Starter–Generator System. Energies 2023, 16, 5125. [Google Scholar] [CrossRef]
- Zhang, X.; Yan, K.; Cheng, M. Two-Stage Series Model Predictive Torque Control for PMSM Drives. IEEE Trans. Power Electron. 2021, 36, 12910–12918. [Google Scholar] [CrossRef]
- Zhang, X.; Bai, H.; Cheng, M. Improved Model Predictive Current Control with Series Structure for PMSM Drives. IEEE Trans. Ind. Electron. 2022, 69, 12437–12446. [Google Scholar] [CrossRef]
- Rodriguez, J.; Garcia, C.; Mora, A.; Flores-Bahamonde, F.; Acuna, P.; Novak, M.; Zhang, Y.; Tarisciotti, L.; Davari, S.A.; Zhang, Z.; et al. Latest Advances of Model Predictive Control in Electrical Drives—Part I: Basic Concepts and Advanced Strategies. IEEE Trans. Power Electron. 2022, 37, 3927–3942. [Google Scholar] [CrossRef]
- Rodriguez, J.; Garcia, C.; Mora, A.; Davari, S.A.; Rodas, J.; Valencia, D.F.; Elmorshedy, M.; Wang, F.; Zuo, K.; Tarisciotti, L.; et al. Latest Advances of Model Predictive Control in Electrical Drives—Part II: Applications and Benchmarking With Classical Control Methods. IEEE Trans. Power Electron. 2022, 37, 5047–5061. [Google Scholar] [CrossRef]
- Harbi, I.; Rodriguez, J.; Liegmann, E.; Makhamreh, H.; Heldwein, M.L.; Novak, M.; Rossi, M.; Abdelrahem, M.; Trabelsi, M.; Ahmed, M.; et al. Model Predictive Control of Multilevel Inverters: Challenges, Recent Advances, and Trends. IEEE Trans. Power Electron. 2023, 38, 10845–10868. [Google Scholar] [CrossRef]
- Harbi, I.; Ahmed, M.; Hackl, C.M.; Rodriguez, J.; Kennel, R.; Abdelrahem, M. Low-Complexity Dual-Vector Model Predictive Control for Single-Phase Nine-Level ANPC-Based Converter. IEEE Trans. Power Electron. 2023, 38, 2956–2971. [Google Scholar] [CrossRef]
- Li, Z.; Xia, J.; Gao, X.; Guo, Y.; Zhang, X. Dual-Vector-Based Predictive Torque Control for Fault-Tolerant Inverter-Fed Induction Motor Drives with Adaptive Switching Instant. IEEE Trans. Ind. Electron. 2023, 70, 12003–12013. [Google Scholar] [CrossRef]
- Guazzelli, P.R.U.; Santos, S.T.C.A.D.; De Castro, A.G.; Pereira, W.C.D.A.; De Oliveira, C.M.R.; Monteiro, J.R.B.D.A.; De Aguiar, M.L. Decoupled Predictive Current Control with Duty-Cycle Optimization of a Grid-Tied Nine-Switch Converter Applied to an Induction Generator. IEEE Trans. Power Electron. 2022, 37, 2778–2789. [Google Scholar] [CrossRef]
- Guazzelli, P.R.U.; Santos, S.T.C.A.D.; De Almeida Monteiro, J.R.B.; De Aguiar, M.L. Model Predictive Control with Duty Cycle Optimization and Virtual Null Vector for Induction Generator with Six Switch Converter. IEEE J. Emerg. Sel. Topics Power Electron. 2023, 11, 1422–1431. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, H. Generalized Two-Vector-Based Model-Predictive Torque Control of Induction Motor Drives. IEEE Trans. Power Electron. 2015, 30, 3818–3829. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, H. Model Predictive Torque Control of Induction Motor Drives with Optimal Duty Cycle Control. IEEE Trans. Power Electron. 2014, 29, 6593–6603. [Google Scholar] [CrossRef]
- Li, X.; Sun, J.; Fan, M.; Yang, Y.; Xiao, Y. An Improved SVM-based Optimal Duty Cycle Model Predictive Current Control for PMSM. In Proceedings of the 2023 IEEE International Conference on Predictive Control of Electrical Drives and Power Electronics (PRECEDE), IEEE, Wuhan, China, 16–19 June 2023; pp. 1–5. [Google Scholar]
- Saeed, M.S.R.; Song, W.; Huang, L.; Yu, B. Double-Vector-Based Finite Control Set Model Predictive Control for Five-Phase PMSMs With High Tracking Accuracy and DC-Link Voltage Utilization. IEEE Trans. Power Electron. 2022, 37, 15234–15244. [Google Scholar] [CrossRef]
- Zhang, X.; Hou, B. Double Vectors Model Predictive Torque Control Without Weighting Factor Based on Voltage Tracking Error. IEEE Trans. Power Electron. 2018, 33, 2368–2380. [Google Scholar] [CrossRef]
- Chen, W.; Zeng, S.; Zhang, G.; Shi, T.; Xia, C. A Modified Double Vectors Model Predictive Torque Control of Permanent Magnet Synchronous Motor. IEEE Trans. Power Electron. 2019, 34, 11419–11428. [Google Scholar] [CrossRef]
- Garcia, C.F.; Silva, C.A.; Rodriguez, J.R.; Zanchetta, P.; Odhano, S.A. Modulated Model-Predictive Control with Optimized Overmodulation. IEEE J. Emerg. Sel. Topics Power Electron. 2019, 7, 404–413. [Google Scholar] [CrossRef]
- Karamanakos, P.; Geyer, T.; Kennel, R. On the Choice of Norm in Finite Control Set Model Predictive Control. IEEE Trans. Power Electron. 2018, 33, 7105–7117. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Judgment Conditions | Sector |
|---|---|
| W1 > W3 > W5 | I |
| W3 > W1 > W5 | II |
| W3 > W5 > W1 | III |
| W5 > W3 > W1 | IV |
| W5 > W1 > W3 | V |
| W1 > W5 > W3 | VI |
| Sector | Vector Combinations |
|---|---|
| I | C1(V1, V0), C2(V2, V0), C3(V1, V2), C4(V1, V3), C5(V6, V2) |
| II | C1(V2, V0), C2(V3, V0), C3(V2, V3), C4(V2, V4), C5(V1, V3) |
| III | C1(V3, V0), C2(V4, V0), C3(V3, V4), C4(V3, V5), C5(V2, V4) |
| IV | C1(V4, V0), C2(V5, V0), C3(V4, V5), C4(V4, V6), C5(V3, V5) |
| V | C1(V5, V0), C2(V6, V0), C3(V5, V6), C4(V5, V1), C5(V4, V6) |
| VI | C1(V6, V0), C2(V1, V0), C3(V6, V1), C4(V6, V2), C5(V5, V1) |
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Number of pole pairs | PP | 5 | |
| Rated speed | ωref | 2500 | rpm |
| Stator inductor | Ls | 5.5 × 10−3 | H |
| DC side voltage | Vdc | 160 | V |
| Permanent magnet flux linkage | Ψf | 0.042 | Wb |
| Stator resistance | Rs | 1.81 | Ω |
| Coefficient of inertia | J | 3.8 × 10−5 | kg·m2 |
| Rated output power | Pout | 257.3 | W |
| Rated torque | Tem | 0.98 | Nm |
| MPC Methods | Execution Time (μs) |
|---|---|
| SV−MPC | 65.30 |
| DV–MPC in [14] | 181.51 |
| Proposed method | 169.28 |
| MPC Methods | Involve Trigonometric Functions | Computation Times | Dynamic Performance | Steady–State Performance | ||
|---|---|---|---|---|---|---|
| Speed Ripple | Torque Ripple | Current THD | ||||
| SV–MPC (benchmark) | No | 7 | √√√ | ✗✗✗ | ✗ | ✗✗ |
| DV–MPC in [11] | No | 25 | ✗✗ | ✗ | √ | √√ |
| DV–MPC in [12] | No | 6 | √√ | ✗✗ | √ | ✗ |
| DV–MPC in [13] | No | 3 | √√ | ✗✗ | ✗ | ✗ |
| DV–MPC in [14,15] | Yes | 3 | ✗ | √ | √ | √ |
| DV–MPC in [16] | No | 9 | √ | ✗ | √ | √ |
| Proposed DV−MPC | No | 5 | √ | √√ | √√ | √√√ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Z.; Wei, Q.; Xiao, X.; Xia, Y.; Rivera, M.; Wheeler, P. Enhanced Dual–Vector Model Predictive Control for PMSM Drives Using the Optimal Vector Selection Principle. Energies 2023, 16, 7482. https://doi.org/10.3390/en16227482
Huang Z, Wei Q, Xiao X, Xia Y, Rivera M, Wheeler P. Enhanced Dual–Vector Model Predictive Control for PMSM Drives Using the Optimal Vector Selection Principle. Energies. 2023; 16(22):7482. https://doi.org/10.3390/en16227482
Chicago/Turabian StyleHuang, Zhen, Qiang Wei, Xuechun Xiao, Yonghong Xia, Marco Rivera, and Patrick Wheeler. 2023. "Enhanced Dual–Vector Model Predictive Control for PMSM Drives Using the Optimal Vector Selection Principle" Energies 16, no. 22: 7482. https://doi.org/10.3390/en16227482
APA StyleHuang, Z., Wei, Q., Xiao, X., Xia, Y., Rivera, M., & Wheeler, P. (2023). Enhanced Dual–Vector Model Predictive Control for PMSM Drives Using the Optimal Vector Selection Principle. Energies, 16(22), 7482. https://doi.org/10.3390/en16227482