


Test and Analysis of the Heat Exchanger for Small Ocean Thermal Energy Power Generation Devices

Abstract
:1. Introduction
2. Working Principle
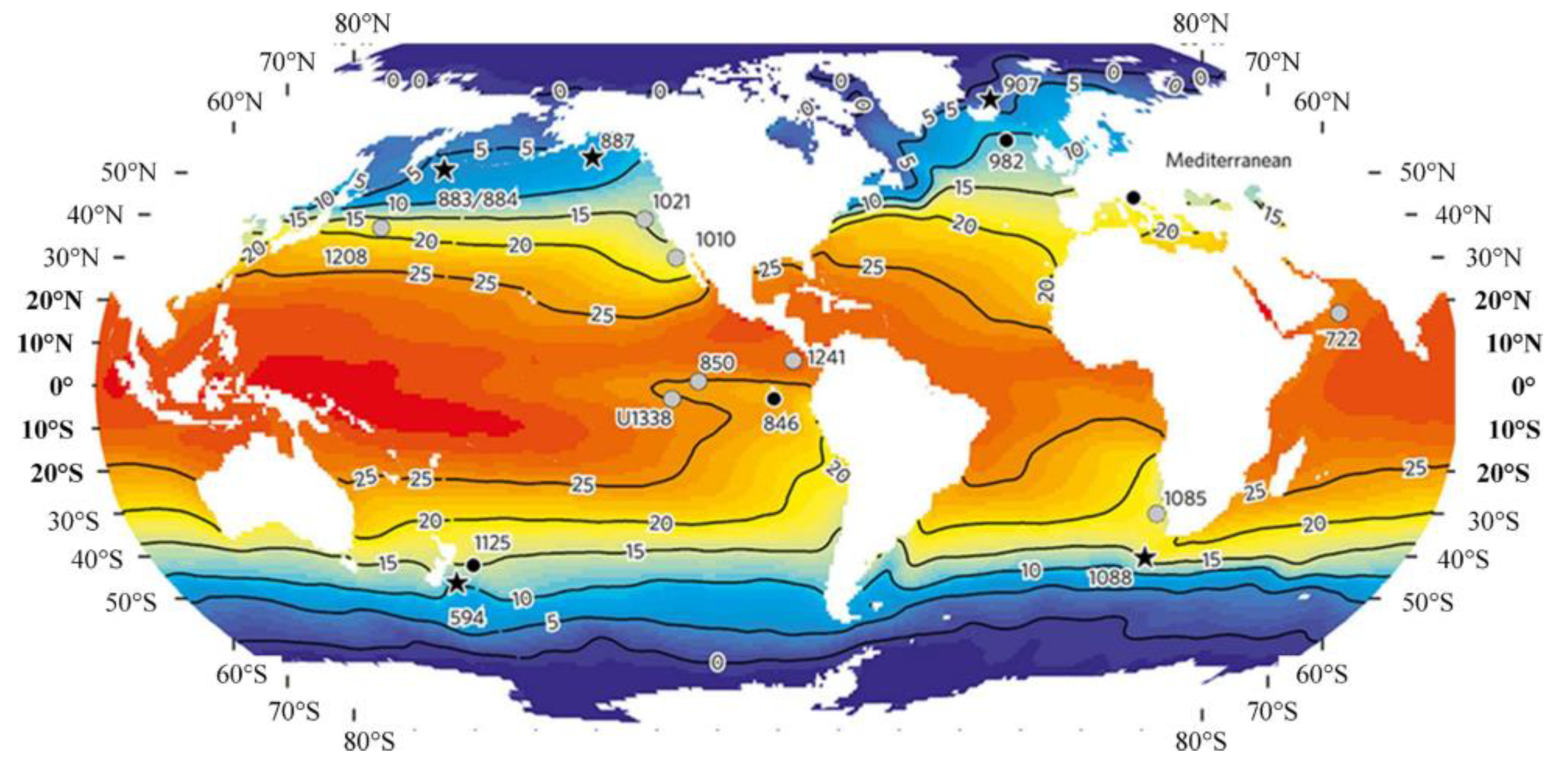
2.1. Temperature Distribution of the Ocean
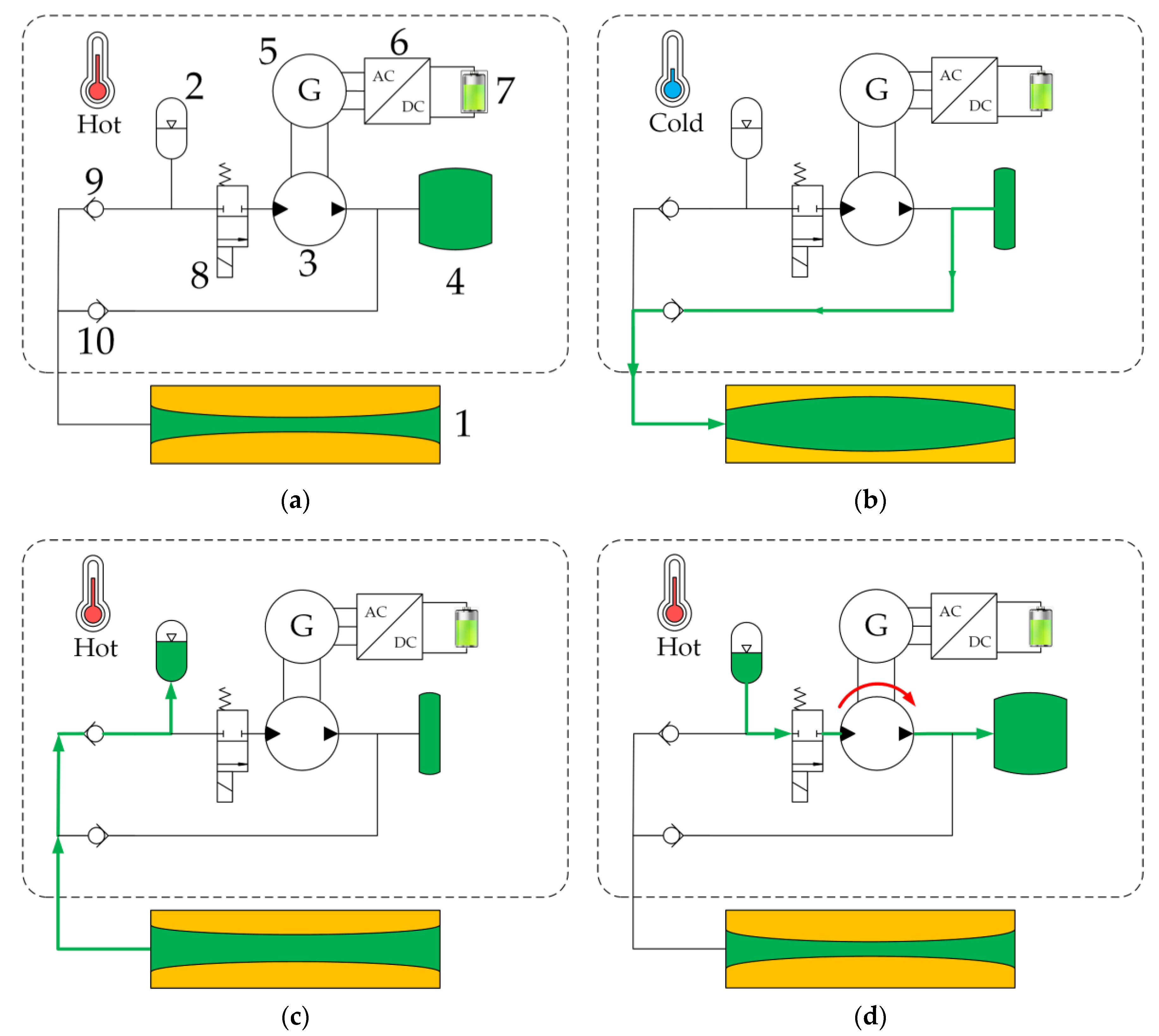
2.2. Working Principle
- The initial state of thermal power generation is shown in Figure 2a. The underwater vehicles stay at the surface of the ocean, and the temperature around the vehicles is higher than the melting point of the PCM in the heat exchanger; thus, the PCM is in a liquid state. The bladder is filled with hydraulic oil and all valves are closed.
- After staying on the surface for a while, the vehicles start to dive into the deep sea. With the diving depth increasing, the water temperature around the vehicles gradually decreases. When the temperature is lower than the freezing point of the PCM, the PCM will solidify and shrink, resulting in there being negative pressure in the heat exchanger. Due to the negative pressure, check valve 2 opens, and the hydraulic oil in the bladder flows into the heat exchanger, as shown in Figure 2b.
- As the underwater vehicles rise from the deep sea to the surface, the seawater temperature increases. When the temperature exceeds the melting point, the PCM melts and expands in volume. Then, check valve 2 closes and check valve 1 opens, and the expanded PCM squeezes the hydraulic oil from the heat exchanger into the accumulator, as shown in Figure 2c.
- Due to the inflow of hydraulic oil, the pressure of the accumulator gradually rises. With the hydraulic oil continuously flowing into the accumulator, the pressure inside the accumulator gradually rises. When the pressure reaches the set value, the solenoid valve will open and the hydraulic oil in the accumulator will flow through the hydraulic motor to the bladder. Driven by hydraulic oil, the hydraulic motor rotates and drives the generator to generate electricity, and the electricity is rectified and stored in the battery, as shown in Figure 2d.
3. Phase Change Transfer Model of the Heat Exchanger
3.1. The Structure of the Heat Exchanger
3.2. Numerical Model
3.3. Phase Change Transfer Model of the Heat Exchanger
- PCM is homogeneous and isotropic. The density, specific capacity and thermal conductivity of the PCM are constant in a single phase, and the difference only exists in different phases, such as in solid or liquid phases;
- PCM has great stability. There is no supercooling or overheating phenomenon, and performance degradation does not exist;
- The heat transfer of heat exchanger in the axial direction is not considered;
- The freezing point and melting point of the PCM are different values;
- The influence of natural convection on the phase change process is ignored. The fluid flow generated forms the density difference between the liquid and the solid phase of the PCM in the heat transfer process; thus, natural convection is very weak.
4. Numerical Model Validation
4.1. Boundary Conditions and Initial Conditions
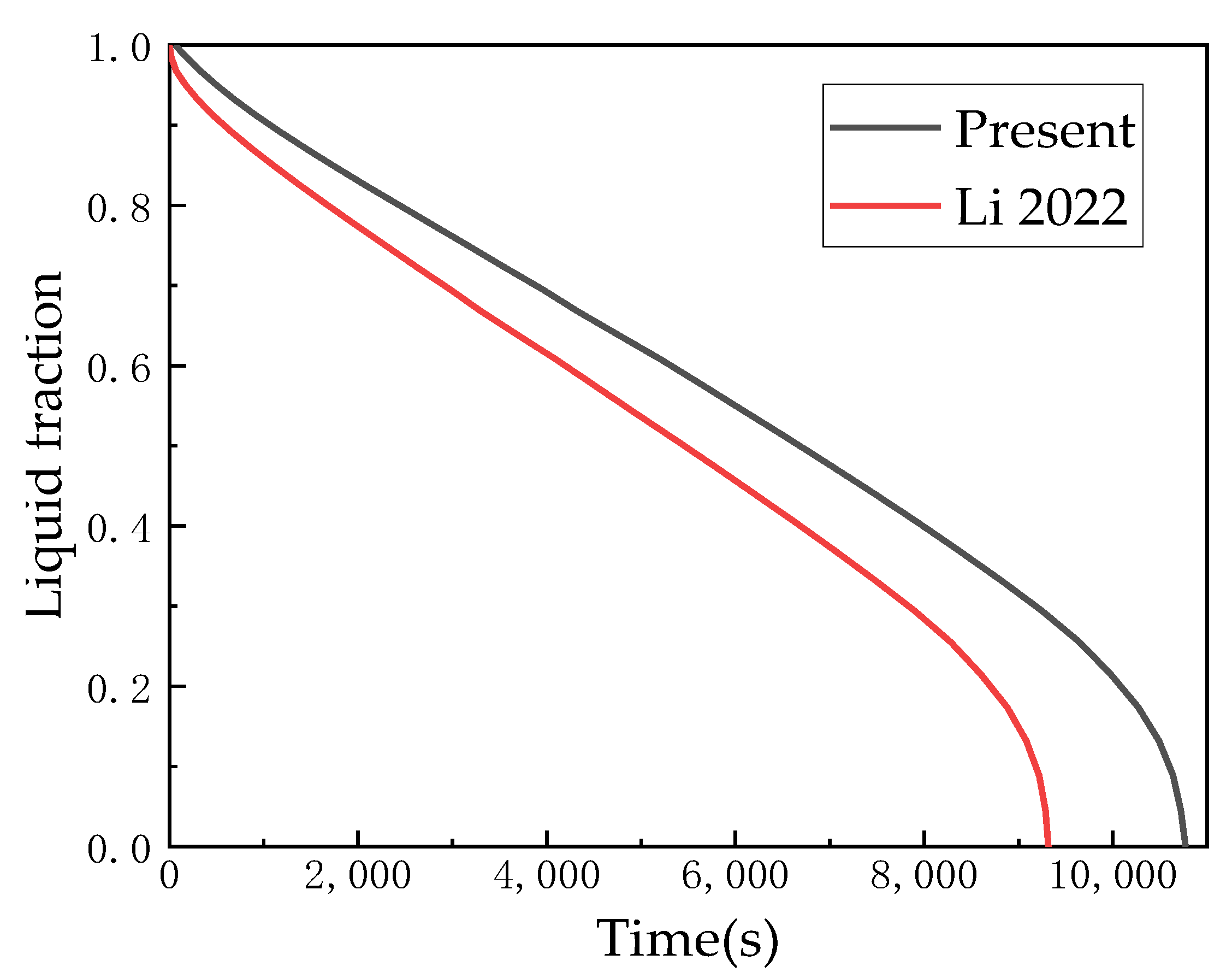
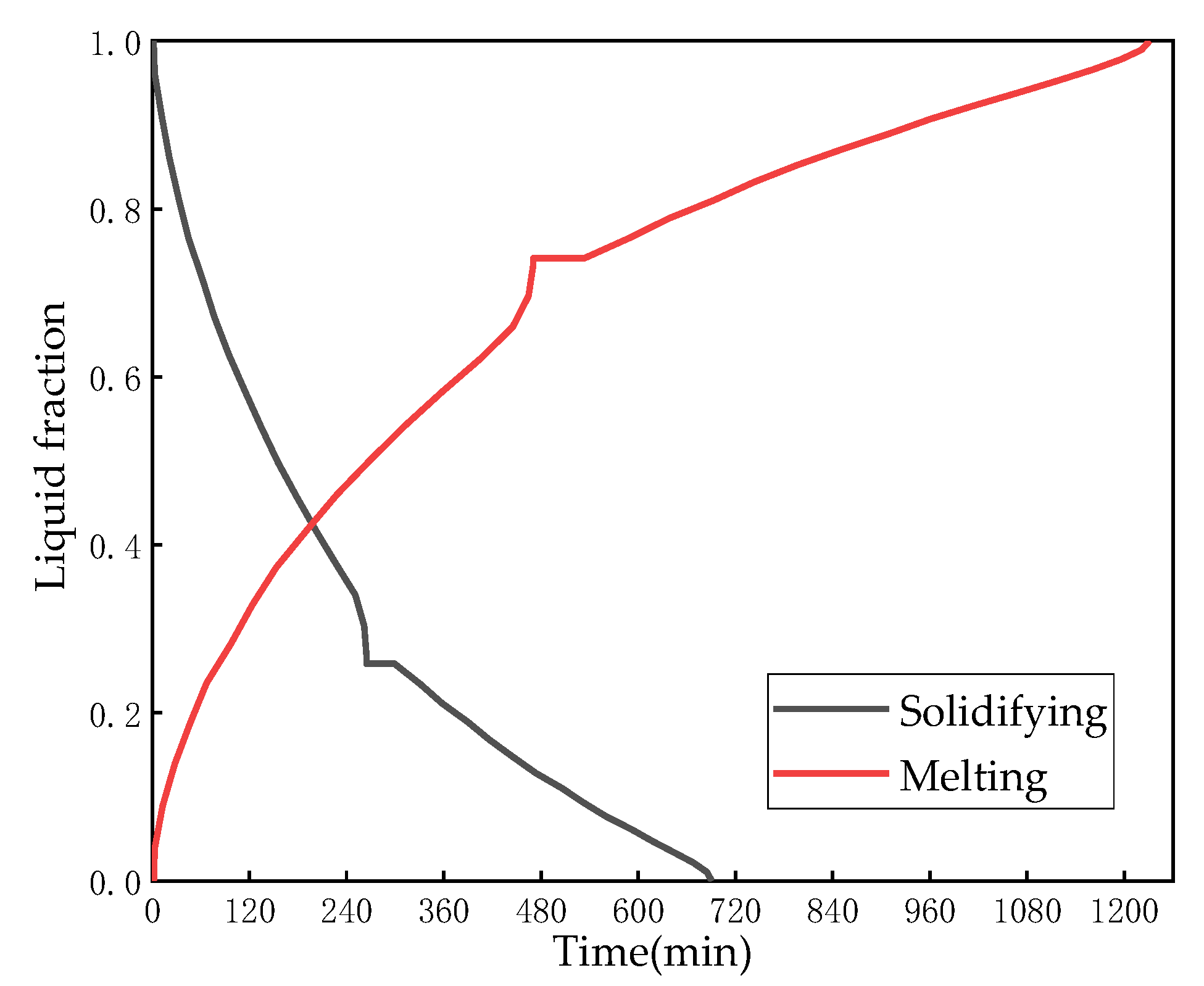
4.2. Numerical Simulation and Results
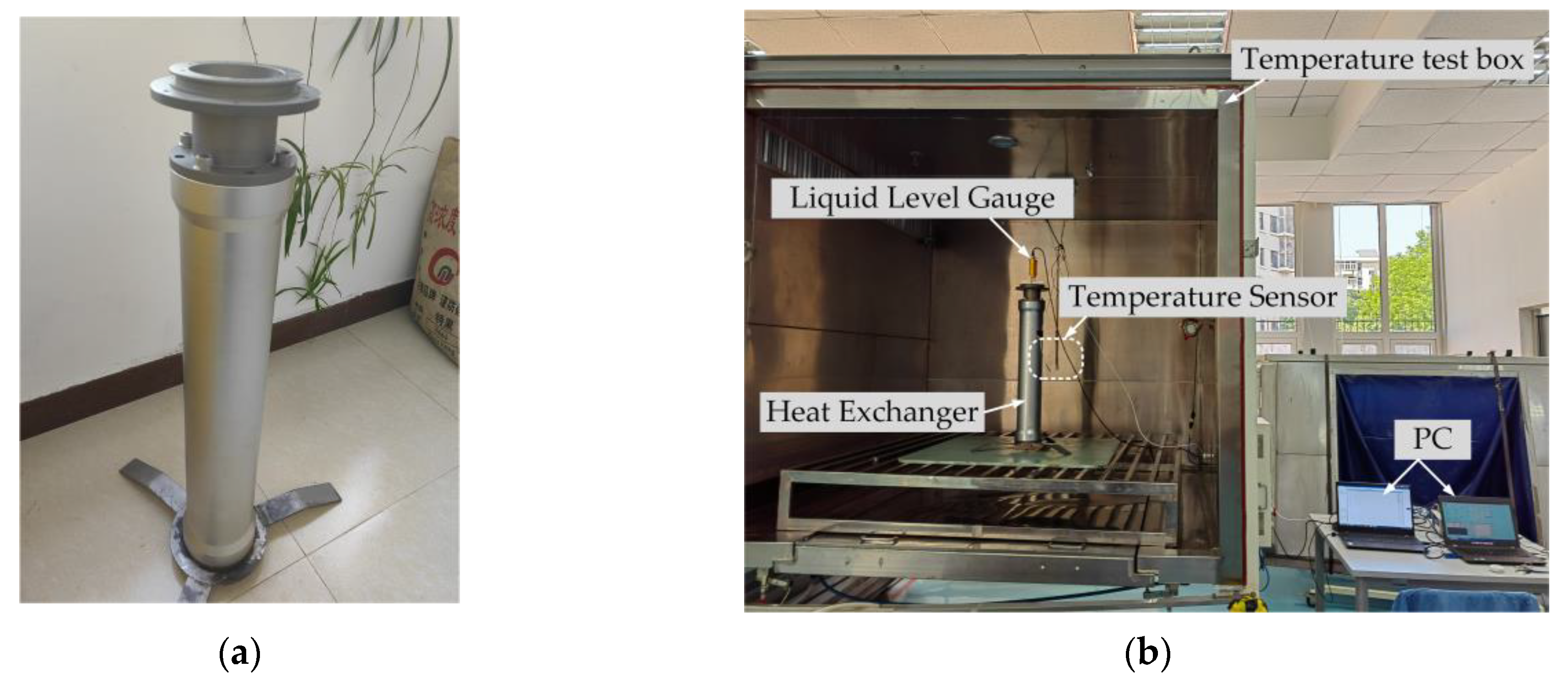
5. Experiment Study
6. Conclusions and Discussion
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations and Nomenclature
| PCM | Phase change material |
| SMAs | Shape memory alloys |
| TEGs | Thermoelectric generators |
| Specific heat | |
| Pressure energy obtained with the accumulator | |
| Liquid phase fraction | |
| Enthalpy | |
| Specific enthalpy | |
| Convective heat transfer coefficient | |
| Thermal conductivity of the PCM | |
| Latent heat | |
| Length of the heat exchanger | |
| Weight of the PCM | |
| Pressure | |
| Instantaneous pressure of the accumulator | |
| Prandtl number | |
| , | Initial/final pressure of the accumulator |
| The instantaneous flow rate of the hydraulic oil entering the accumulator | |
| Reynolds number | |
| The source term due to the presence of a solid | |
| Temperature | |
| Reference temperature | |
| , | Solidification/melting temperature of the PCM |
| Fluid velocity | |
| Velocity of seawater | |
| Initial volume of the accumulator | |
| Volume change of the accumulator | |
| Thermal conductivity of seawater | |
| Viscosity of the PCM | |
| Density | |
| Kinematic viscosity |
References
- Sahoo, A.; Dwivedy, S.K.; Robi, P.S. Advancements in the field of autonomous underwater vehicle. Ocean Eng. 2019, 181, 145–160. [Google Scholar] [CrossRef]
- Li, S.; Zhang, Y.; Zhou, Z.; Shi, W.; Zhang, J.; Wang, B. Study on improving the storage efficiency of ocean thermal energy storage (OTES) unit by using fins. Case Stud. Therm. Eng. 2022, 37, 102262. [Google Scholar] [CrossRef]
- Hyakudome, T.; Nakatani, T.; Yoshida, H.; Tani, T.; Ito, H.; Sugihara, K. Development of fuel cell system for long cruising lange Autonomous Underwater Vehicle. In Proceedings of the 2016 IEEE/OES Autonomous Underwater Vehicles (AUV), Tokyo, Japan, 6–9 November 2016; pp. 165–170. [Google Scholar]
- Wang, G.; Yang, Y.; Wang, S.; Zhang, H.; Wang, Y. Modification of the phase change transfer model for underwater vehicles: A molecular dynamics approach. Int. J. Energy Res. 2020, 44, 11323–11344. [Google Scholar] [CrossRef]
- Aintablian, H.O.; Valdez, T.I.; Jones, J.A. A Hydraulic Motor-Alternator System for Ocean-Submersible Vehicles. In Proceedings of the 10th International Energy Conversion Engineering Conference, Atlanta, Georgia, 30 July–1 August 2012. [Google Scholar]
- Wang, X.; Shang, J.; Luo, Z.; Tang, L.; Zhang, X.P.; Li, J. Reviews of power systems and environmental energy conversion for unmanned underwater vehicles. Renew. Sustain. Energy Rev. 2012, 16, 1958–1970. [Google Scholar] [CrossRef]
- Hegarty, A.; Westbrook, G.; Glynn, D.; Murray, D.; Omerdic, E.; Toal, D.J.F. A Low-Cost Remote Solar Energy Monitoring System for a Buoyed IoT Ocean Observation Platform. In Proceedings of the 2019 IEEE 5th World Forum on Internet of Things (WF-IoT), Limerick, Ireland, 15–18 April 2019; pp. 386–391. [Google Scholar]
- Thomas, T.; Tarapore, D. Efficient simulation of wave glider dynamics and validation with trans-Pacific voyages. In Proceedings of the OCEANS 2023–Limerick, Limerick, Ireland, 5–8 June 2023; pp. 1–7. [Google Scholar]
- Chao, Y. Autonomous underwater vehicles and sensors powered by ocean thermal energy. In Proceedings of the OCEANS 2016–Shanghai, Shanghai, China, 10–13 April 2016; pp. 1–4. [Google Scholar]
- Yang, M.-H.; Yeh, R.H. Analysis of optimization in an OTEC plant using organic Rankine cycle. Renew. Energy 2014, 68, 25–34. [Google Scholar] [CrossRef]
- Webb, D.C.; Simonetti, P.J.; Jones, C.P. SLOCUM: An underwater glider propelled by environmental energy. IEEE J. Ocean. Eng. 2001, 26, 447–452. [Google Scholar] [CrossRef]
- Elkhatat, A.M.; Al-Muhtaseb, S.A. Combined “Renewable Energy–Thermal Energy Storage (RE–TES)” Systems: A Review. Energies 2023, 16, 4471. [Google Scholar] [CrossRef]
- Carneiro, J.F.; Almeida, F.G.D. Model and simulation of the energy retrieved by thermoelectric generators in an underwater glider. Energy Convers. Manag. 2018, 163, 38–49. [Google Scholar] [CrossRef]
- Angilella, A.J.; Gandhi, F.; Miller, T.F. Design and testing of a shape memory alloy buoyancy engine for unmanned underwater vehicles. Smart Mater. Struct. 2015, 24, 115018. [Google Scholar] [CrossRef]
- Wang, G.; Yanan, Y.; Wang, S. Ocean thermal energy application technologies for unmanned underwater vehicles: A comprehensive review. Appl. Energy 2020, 278, 115752. [Google Scholar] [CrossRef]
- Jones, C.; Allsup, B.; DeCollibus, C. Slocum glider: Expanding our understanding of the oceans. In Proceedings of the 2014 Oceans–St. John’s, St. John’s, NL, Canada, 14–19 September 2014; pp. 1–10. [Google Scholar]
- Wang, B.; Zhang, W.; Duan, Y. Analysis and test of power generating characteristics of small ocean thermal energy conversion device. Acta Energiae Solaris Sin. 2018, 39, 3302–3310. [Google Scholar]
- Wang, G.; Yanan, Y.; Wang, S.; Zhang, H.; Wang, Y. Efficiency analysis and experimental validation of the ocean thermal energy conversion with phase change material for underwater vehicle. Appl. Energy 2019, 248, 475–488. [Google Scholar] [CrossRef]
- Seatrec Demonstrates Energy-Harvesting Solution for Ocean Instruments. Available online: https://www.oceannews.com/news/science-technology/seatrec-demonstrates-energy-harvesting-solution-for-ocean-instruments (accessed on 19 September 2023).
- Huntsberger, T.L.; Jones, J.A.; Valdez, T.I.; Stirbl, R.C. Slocum-TREC Thermal Glider. In Proceedings of the Unmanned Systems Technology Review, Panama City, FL, USA, 27–31 January 2012. [Google Scholar]
- Peng, H.; Chen, Y.; Li, M. Analysis on solid-liquid phase change heat transfer performance of underwater thermal gliders embedding metal foam. J. Shanghai Marit. Univ. 2022, 43, 113–119. [Google Scholar] [CrossRef]
- Wang, G.; Yang, Y.; Wang, S. Thermophysical properties analysis of graphene-added phase change materials and evaluation of enhanced heat transfer effect in underwater thermal vehicles. J. Mol. Liq. 2021, 348, 118048. [Google Scholar] [CrossRef]
- Wang, R. System Design and Experiment of the Thermal Exchanger for Underwater Vehicles. Ph.D. Thesis, Tianjin University, Tianjin, China, 2018. [Google Scholar]
- Buckle, J.R.; Knox, A.; Siviter, J.; Montecucco, A. Autonomous Underwater Vehicle Thermoelectric Power Generation. J. Electron. Mater. 2013, 42, 2214–2220. [Google Scholar] [CrossRef]
- Ancient Global Cooling Gave Rise to Modern Ecosystems. Available online: https://www.brown.edu/news/2016-09-26/miocene (accessed on 19 September 2023).
- Kong, Q.; Ma, J. Numerical simulation of phase changing process for underwater glider propelled by ocean thermal energy. J. Wuhan Univ. Technol. (Transp. Sci. Eng.) 2011, 35, 223–227. [Google Scholar]
- Wang, B.; Wang, G.; Zhang, W.; Liu, H.; Li, M.; Duan, Y. Design and Testing of the Heat Exchange System for Small Ocean Thermal Energy Power Device. J. Ocean. Technol. 2017, 36, 47–52. [Google Scholar]
- Hou, S. Study on Working Principle of Drive-Device of AUV Driven by Temperature Difference Energy. Ph.D. Thesis, Tianjin University, Tianjin, China, 2004. [Google Scholar]
- Yang, R.; Chen, X.; Liu, C.; Shen, Z.; Fang, L. Adjustability of phase change temperature and decrease in melting time of n-hexadecane. J. Wuhan Inst. Technol. 2017, 39, 216–222. [Google Scholar]
- Zheng, D.; Hao, Y.; Li, C.; Wang, C. Technology Development of Fire-Resistant Hydraulic Fluids. Lubr. Oil 2012, 27, 5–9. [Google Scholar] [CrossRef]
- Kong, Q.-l.; Ma, J.; Xia, D. Numerical and experimental study of the phase change process for underwater glider propelled by ocean thermal energy. Renew. Energy 2010, 35, 771–779. [Google Scholar] [CrossRef]
- Yang, S.; Tao, W. Heat Transfer; Higher Education Press: Beijing, China, 2006. [Google Scholar]
- Wang, B.; Wang, M.; Zhang, W.; Liu, H.; Wang, G. Research on the Ocean Thermal Power Generation Technology for Small-Sized Marine Observation Vehicles. J. Ocean Technol. 2015, 34, 78–82. [Google Scholar]
- Xia, Q.; Chen, Y.-h.; Yang, C.; Chen, B.; Muhammad, G.; Ma, X. Maximum efficiency point tracking for an ocean thermal energy harvesting system. Int. J. Energy Res. 2020, 44, 2693–2703. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| State of the PCM | Solid | Liquid |
|---|---|---|
| Density () | 835 | 770 |
| Specific heat () | 1735 | 2216 |
| Thermal conductivity () | 0.35 | 0.15 |
| Melting temperature (°C) | 18.2 | |
| Latent heat () | 236,000 |
| Material | Thermal Conductivity (W/(m · K)) |
|---|---|
| Hydraulic oil | 0.15 |
| High water content fluid (HFA) | 0.598 |
| Water glycol fluid (HFC) | 0.3 |
| Phosphate ester hydraulic fluid (HFD) | 0.13 |
| Water | 0.598 |
| Experiment Number | 1 | 2 | 3 |
|---|---|---|---|
| Solidification time (min) | 390 | 402 | 397 |
| Experiment Number | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| Low temperature | 4 °C | 4 °C | 4 °C | 4 °C | 8 °C | 12 °C |
| High temperature | 30 °C | 28 °C | 25 °C | 24 °C | 24 °C | 24 °C |
| Temperature difference | 26 °C | 24 °C | 21 °C | 20 °C | 16 °C | 12 °C |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, X.; Wang, X.; Wang, B. Test and Analysis of the Heat Exchanger for Small Ocean Thermal Energy Power Generation Devices. Energies 2023, 16, 7559. https://doi.org/10.3390/en16227559
Wu X, Wang X, Wang B. Test and Analysis of the Heat Exchanger for Small Ocean Thermal Energy Power Generation Devices. Energies. 2023; 16(22):7559. https://doi.org/10.3390/en16227559
Chicago/Turabian StyleWu, Xiao, Xiangnan Wang, and Bingzhen Wang. 2023. "Test and Analysis of the Heat Exchanger for Small Ocean Thermal Energy Power Generation Devices" Energies 16, no. 22: 7559. https://doi.org/10.3390/en16227559
APA StyleWu, X., Wang, X., & Wang, B. (2023). Test and Analysis of the Heat Exchanger for Small Ocean Thermal Energy Power Generation Devices. Energies, 16(22), 7559. https://doi.org/10.3390/en16227559