
Modeling and Control-Tuning of a Single-Stage MMC-Based BESS

 ,
,  ,
,  and
and 
Abstract
:1. Introduction
2. Mathematical Models
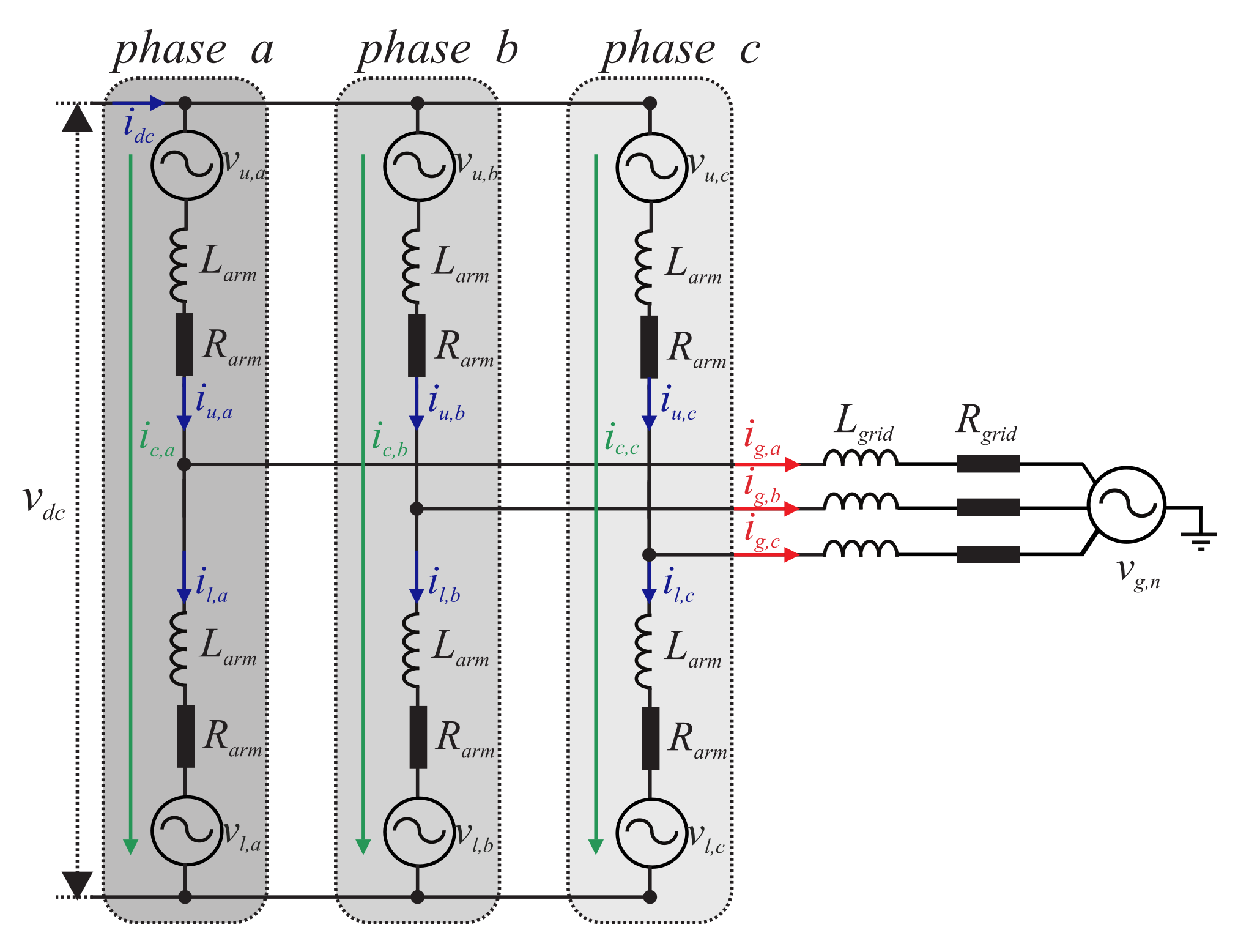
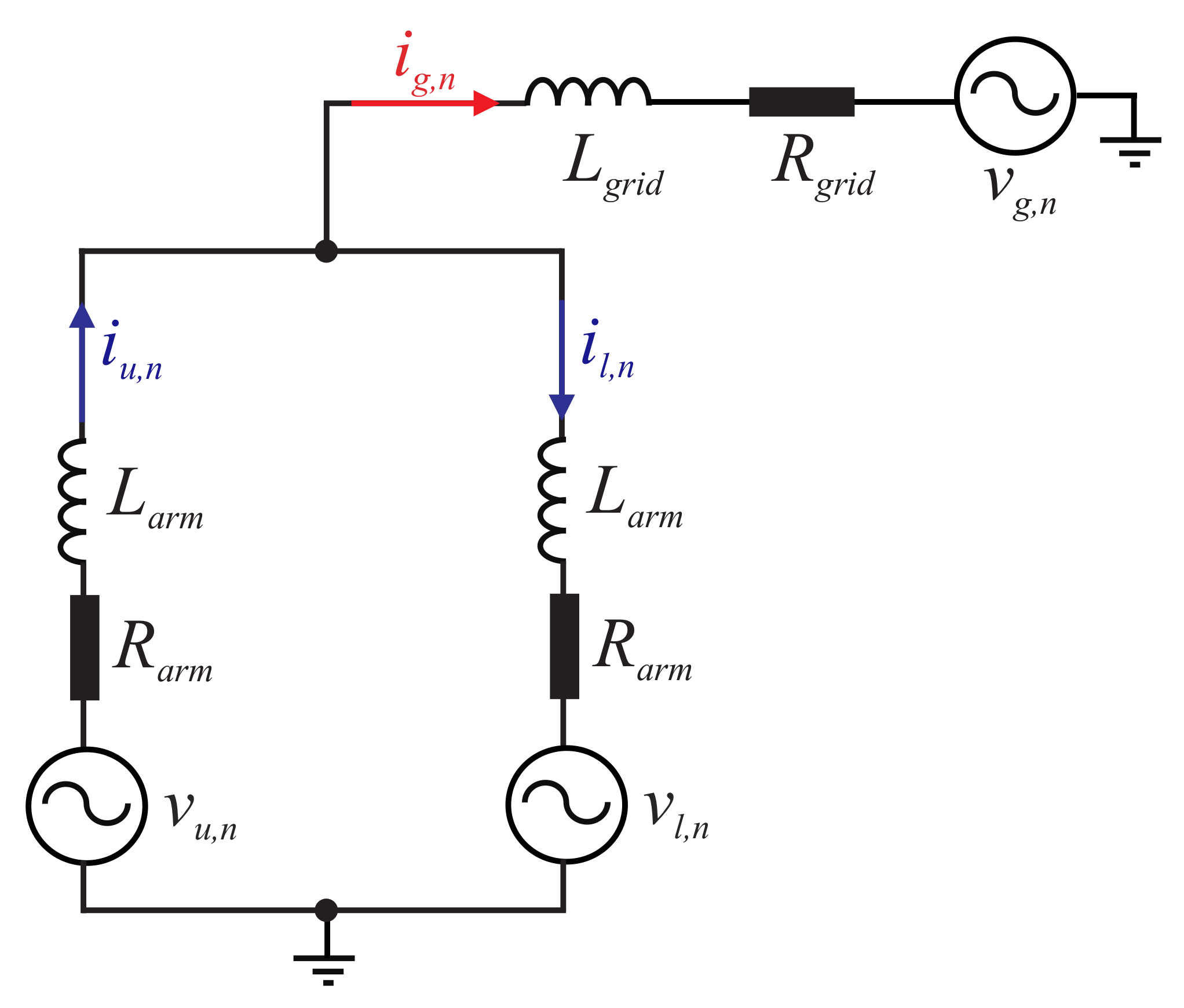
2.1. MMC
- 1.
- The effect of the switching frequency is neglected, i.e., an average model is considered;
- 2.
- The capacitor voltages are assumed to be perfectly balanced.
- 1.
- The product leads to a DC component and the second-harmonic power oscillation. Assuming that and are sinusoidal waves, the average value represents the active power transferred from the submodules to the grid. The oscillating component leads to a second-harmonic ripple in the battery current.
- 2.
- Product leads to a fundamental frequency oscillating power. This term results in a fundamental frequency ripple in the battery current. As observed, this term presents opposite signals in the lower and upper arms. Therefore, this power oscillation is not observed at the converter AC terminals.
- 3.
- The parcels containing require more attention. As previously mentioned, a possible solution for Equation (4) is given by:with free and . The term indicates that a DC component in a circulating current component can perform the energy exchange between the converter phases. Indeed, the sum of the power transfer for the three phases must be zero, which becomes evident in the energy exchange among the converter phases.
- 4.
- The term indicates that a fundamental frequency–circulating current leads to a non-zero power in the arm. Moreover, these terms present opposite signals in the upper and lower arms. Therefore, a fundamental frequency–circulating current can exchange energy between the lower and upper arms.
2.2. Battery
3. MMC-Based BESS Control Strategy
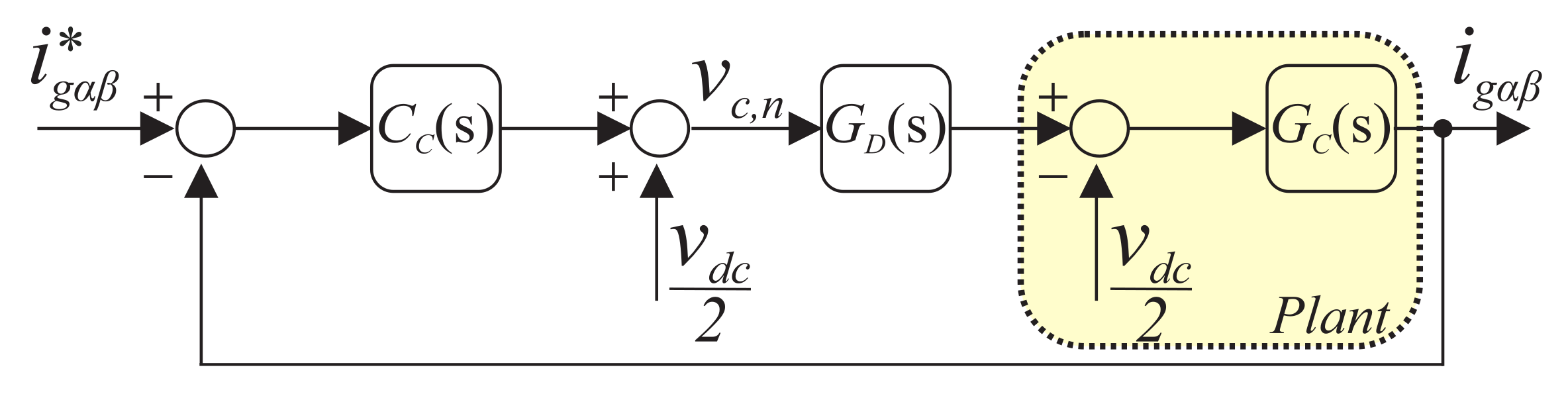
- Grid current control;
- SOC-balancing control;
- Circulating current control.
4. Case Study
5. Control Tuning
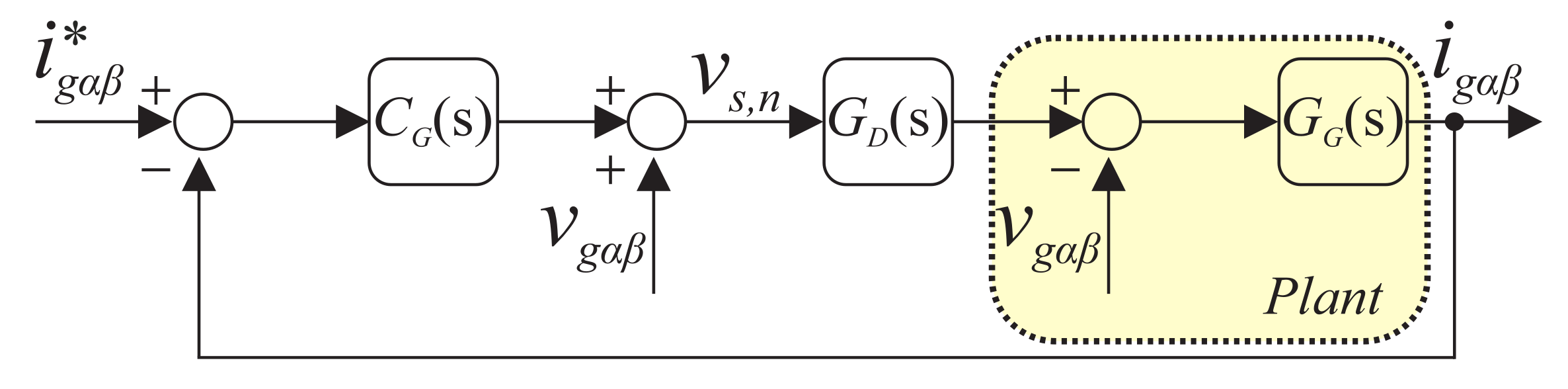
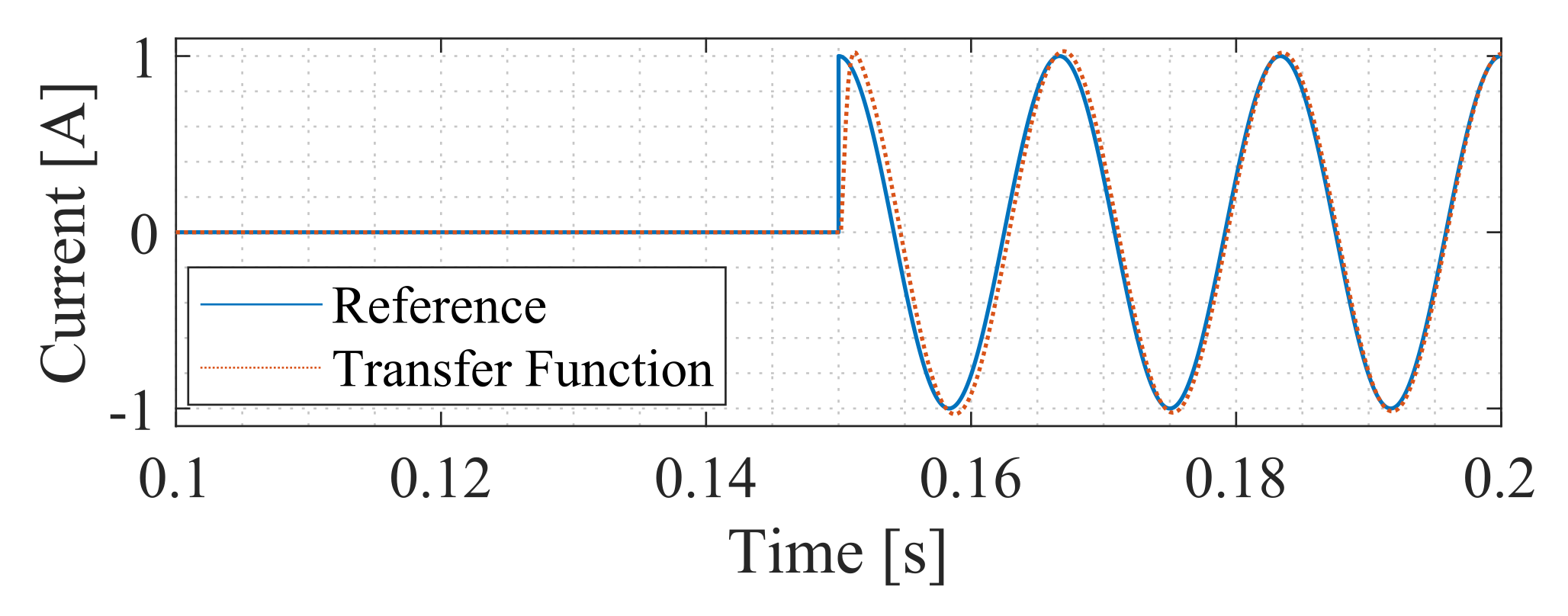
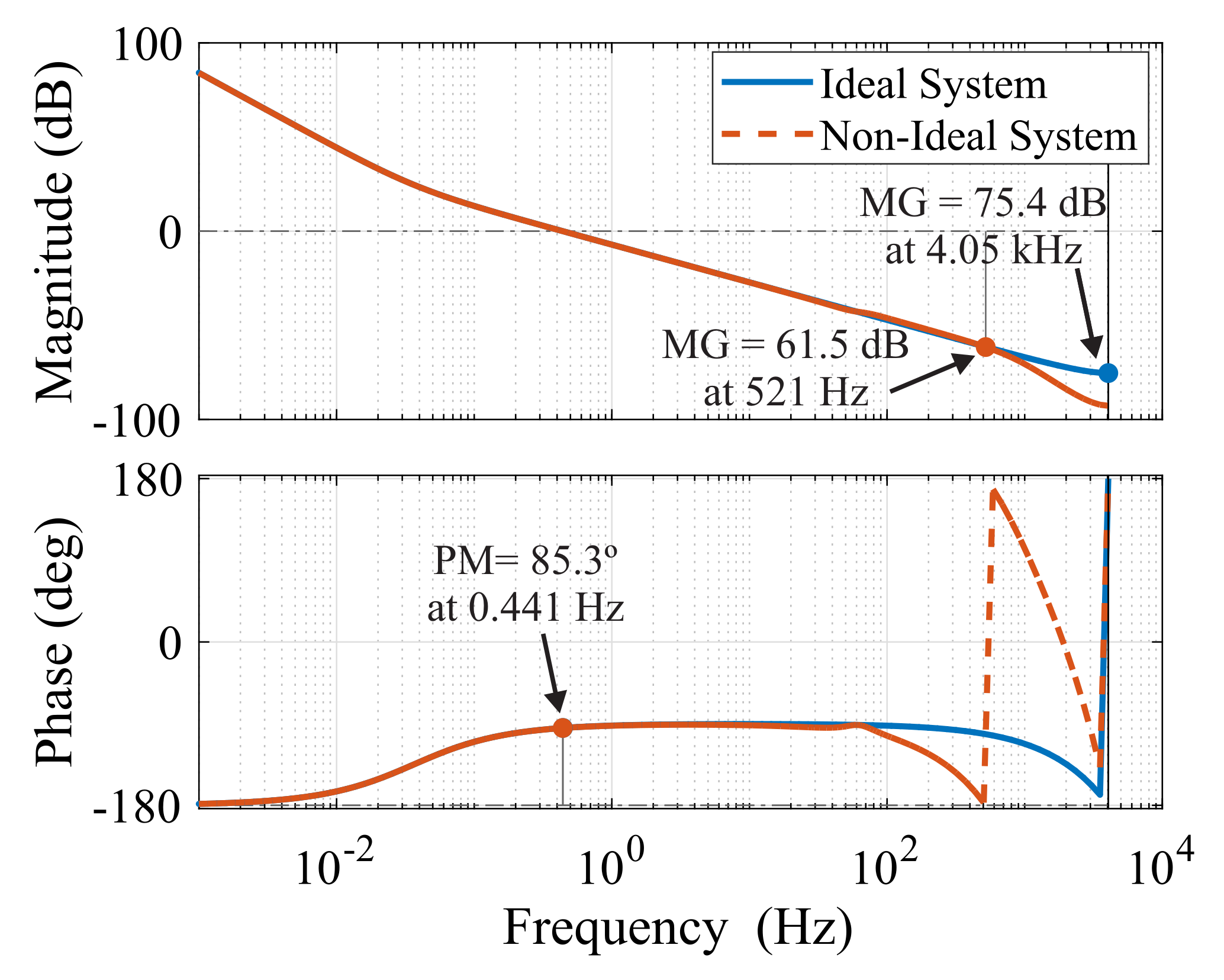
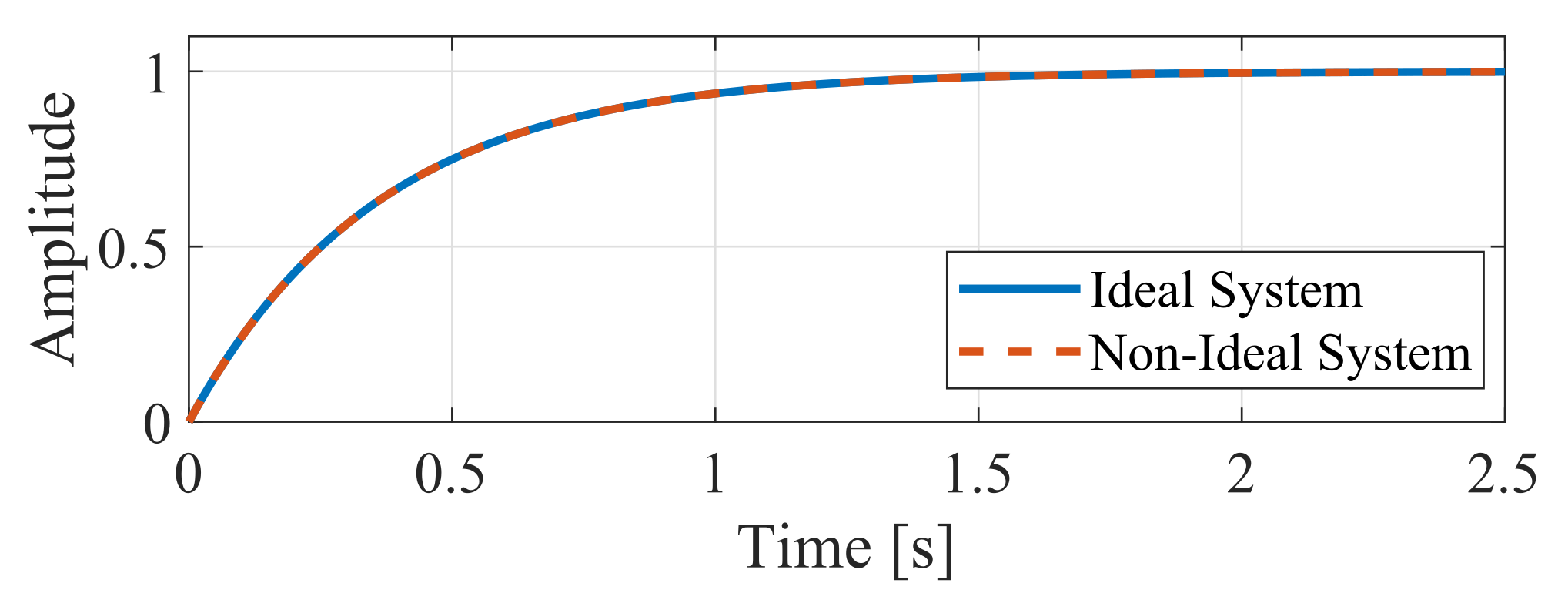
5.1. Grid Current
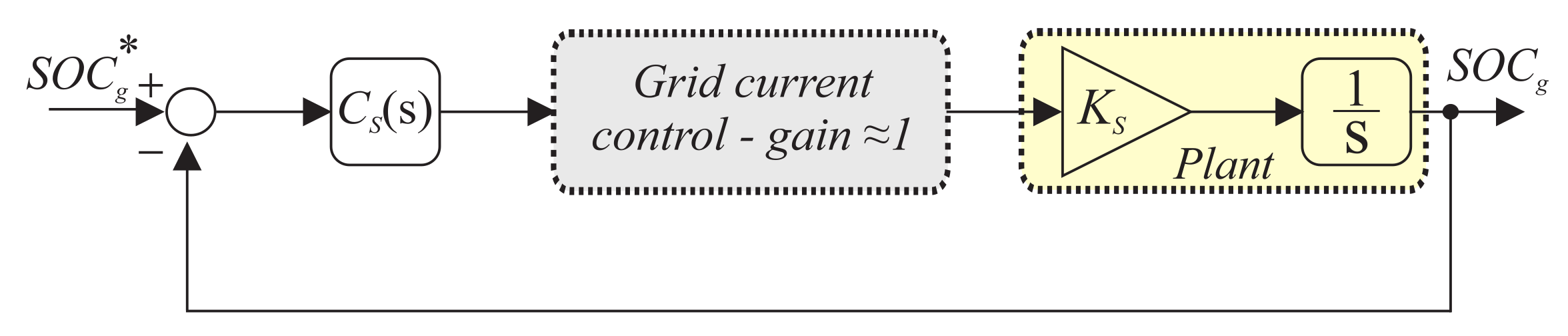
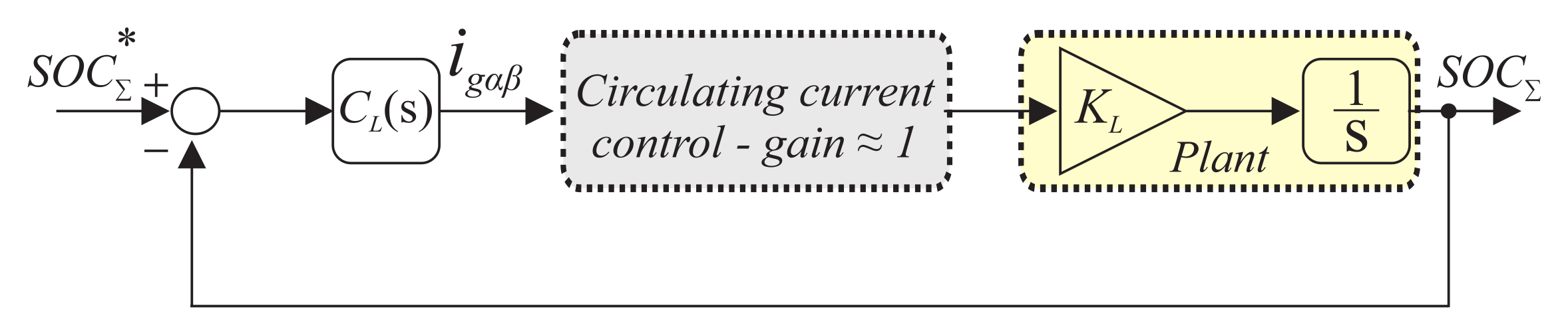
5.2. Global SOC Control
5.3. Circulating Current Control
5.4. Leg-Balancing Control
5.5. Arm-Balancing Control
5.6. Individual SOC-Balancing Control
6. Results
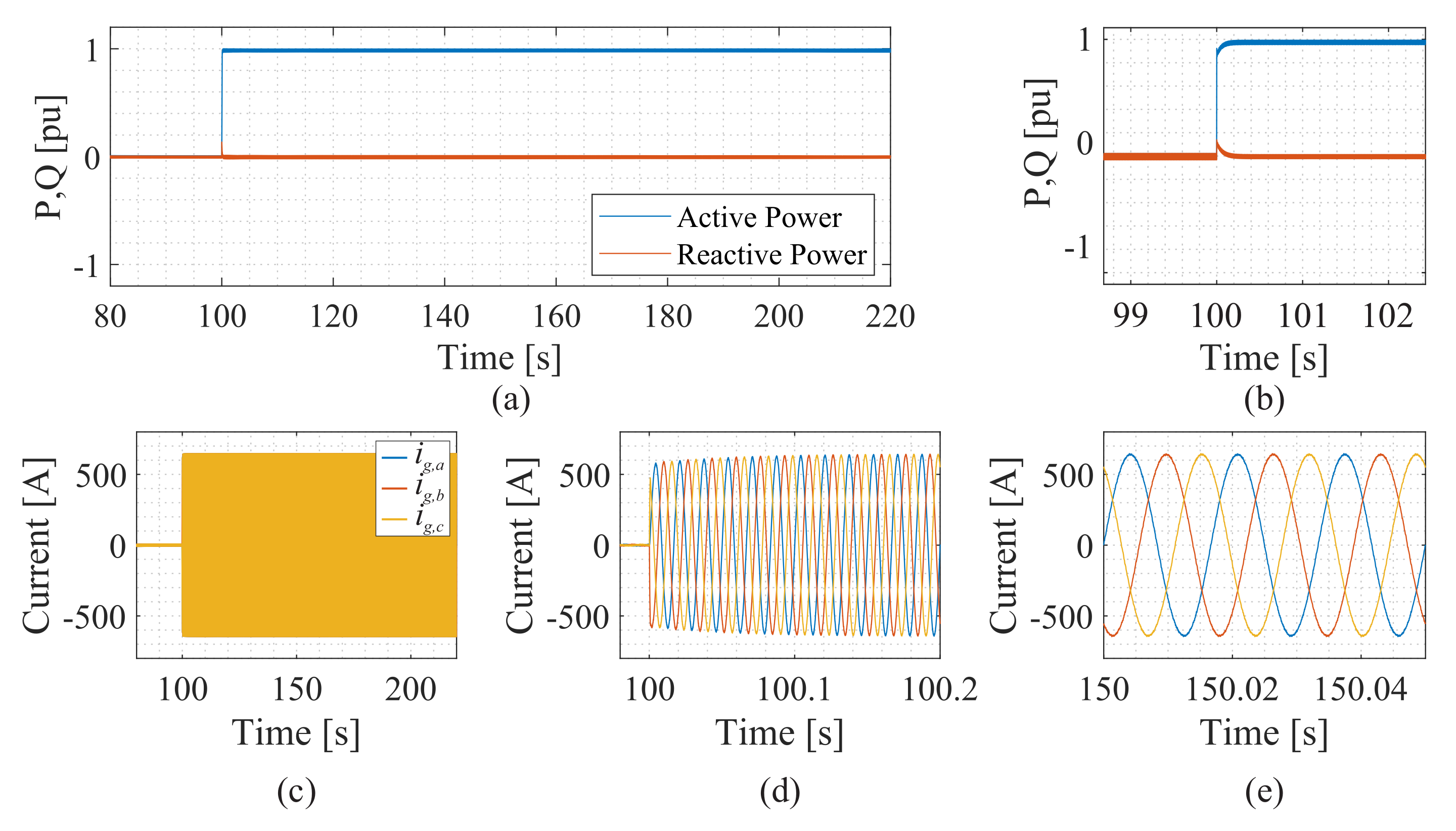
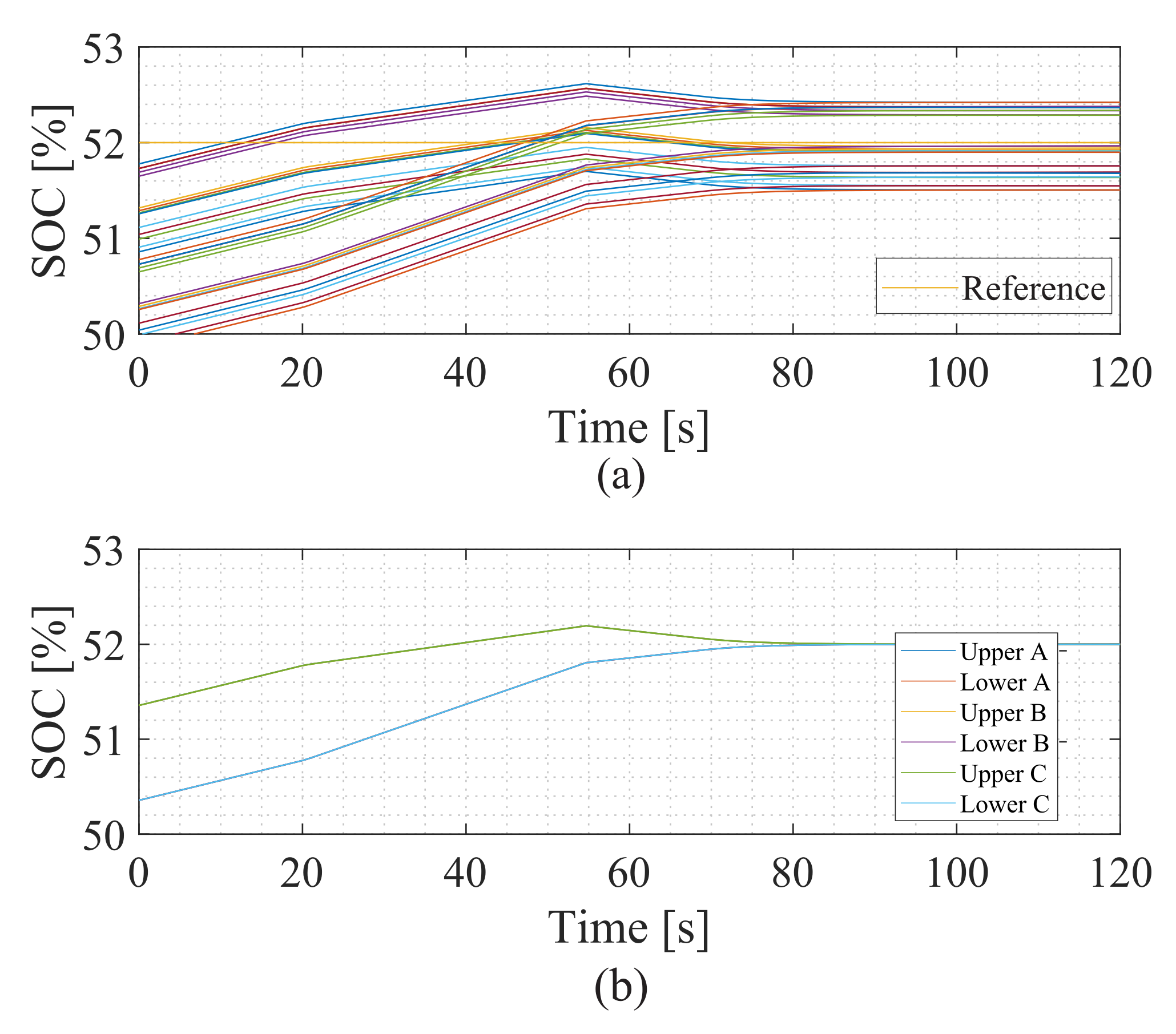
6.1. Charging Procedure
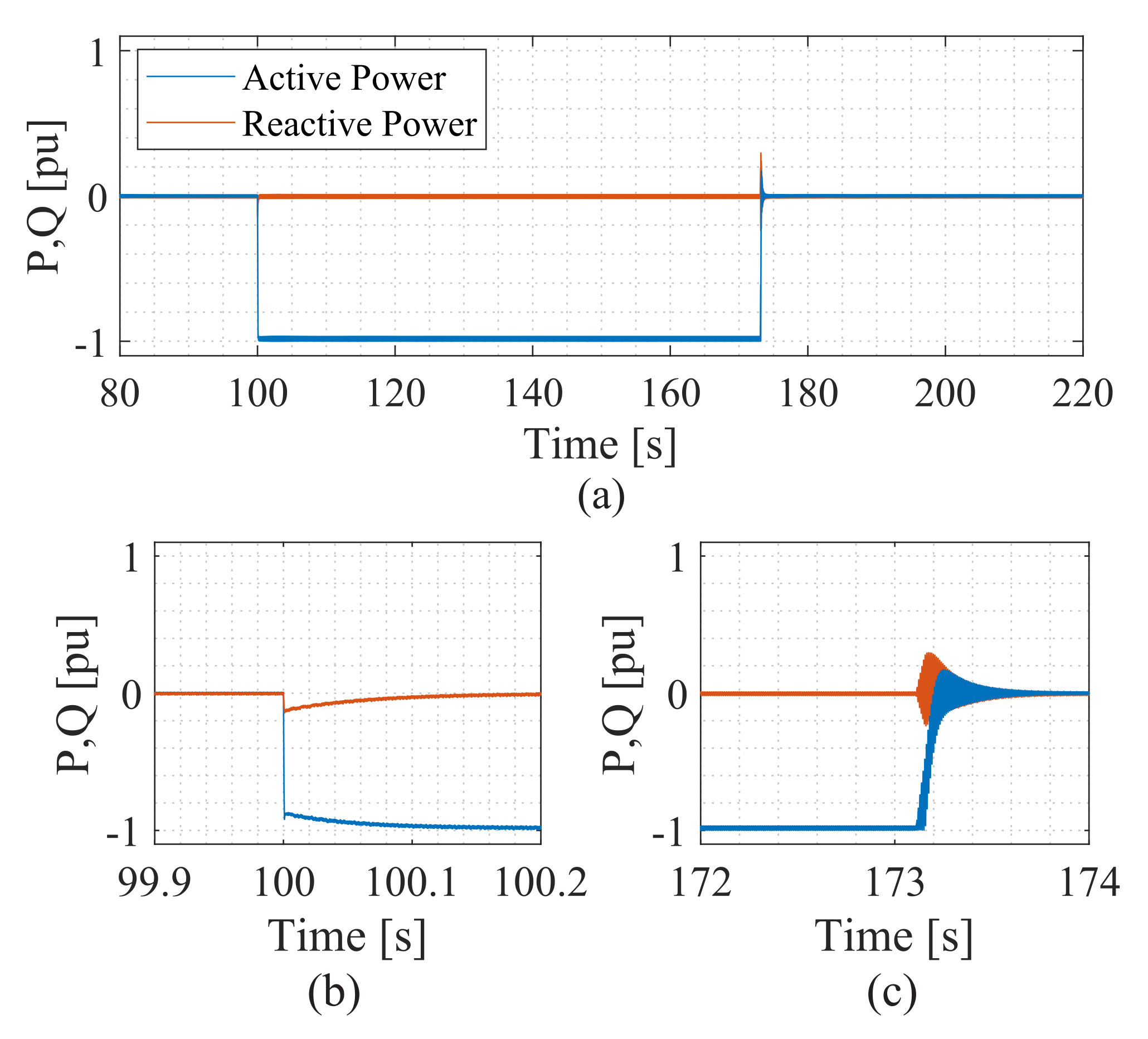
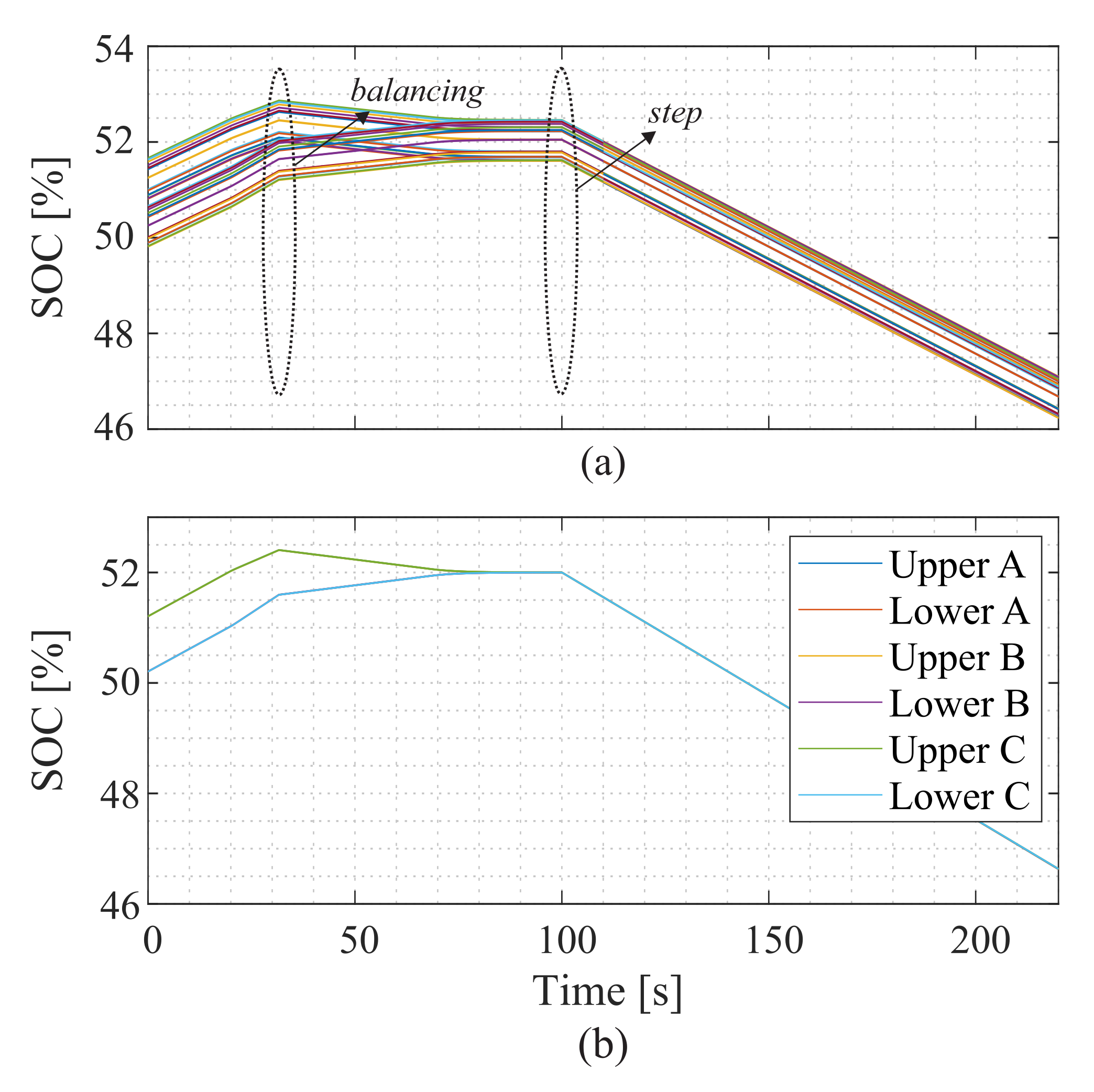
6.2. Discharge Procedure
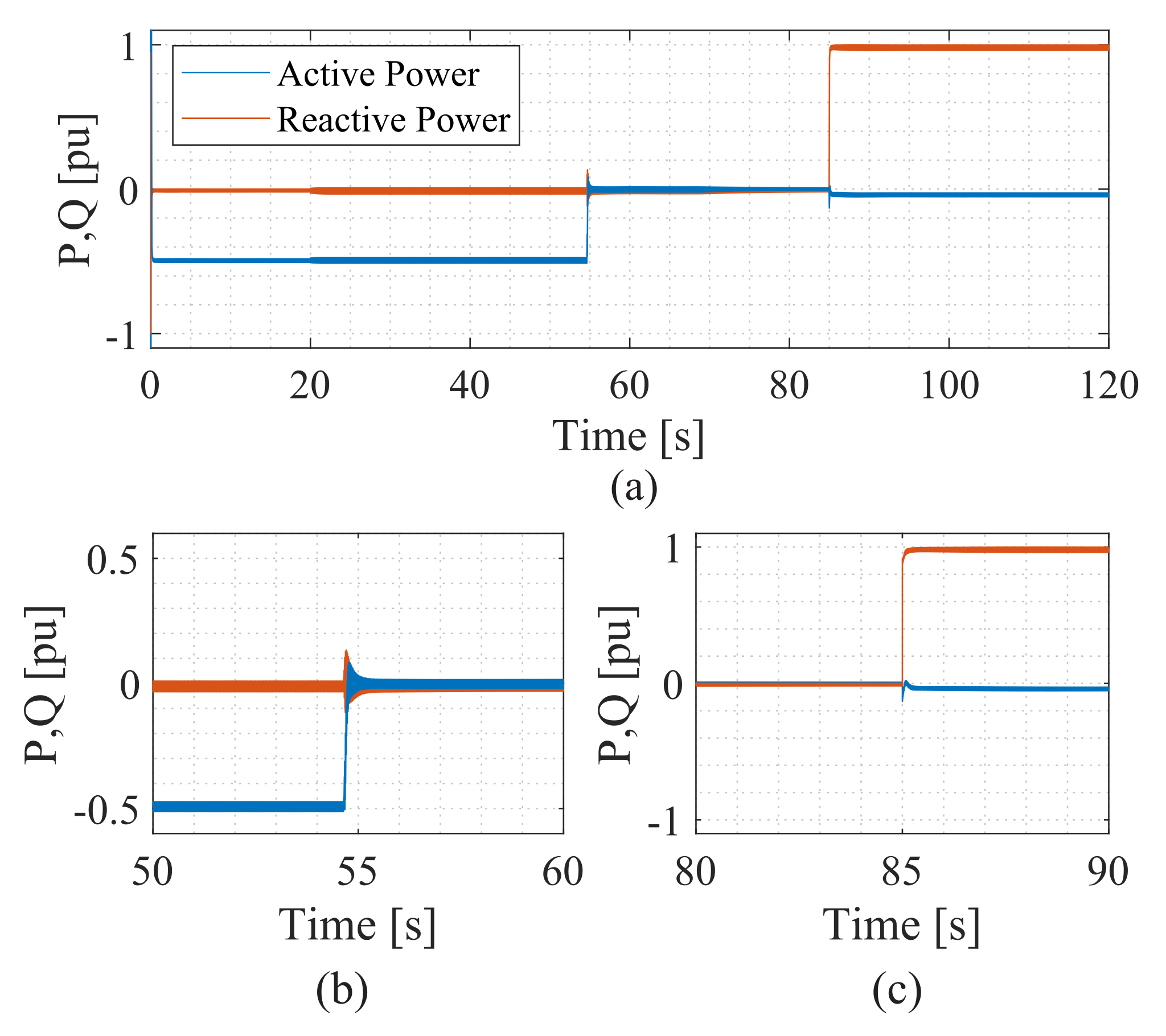
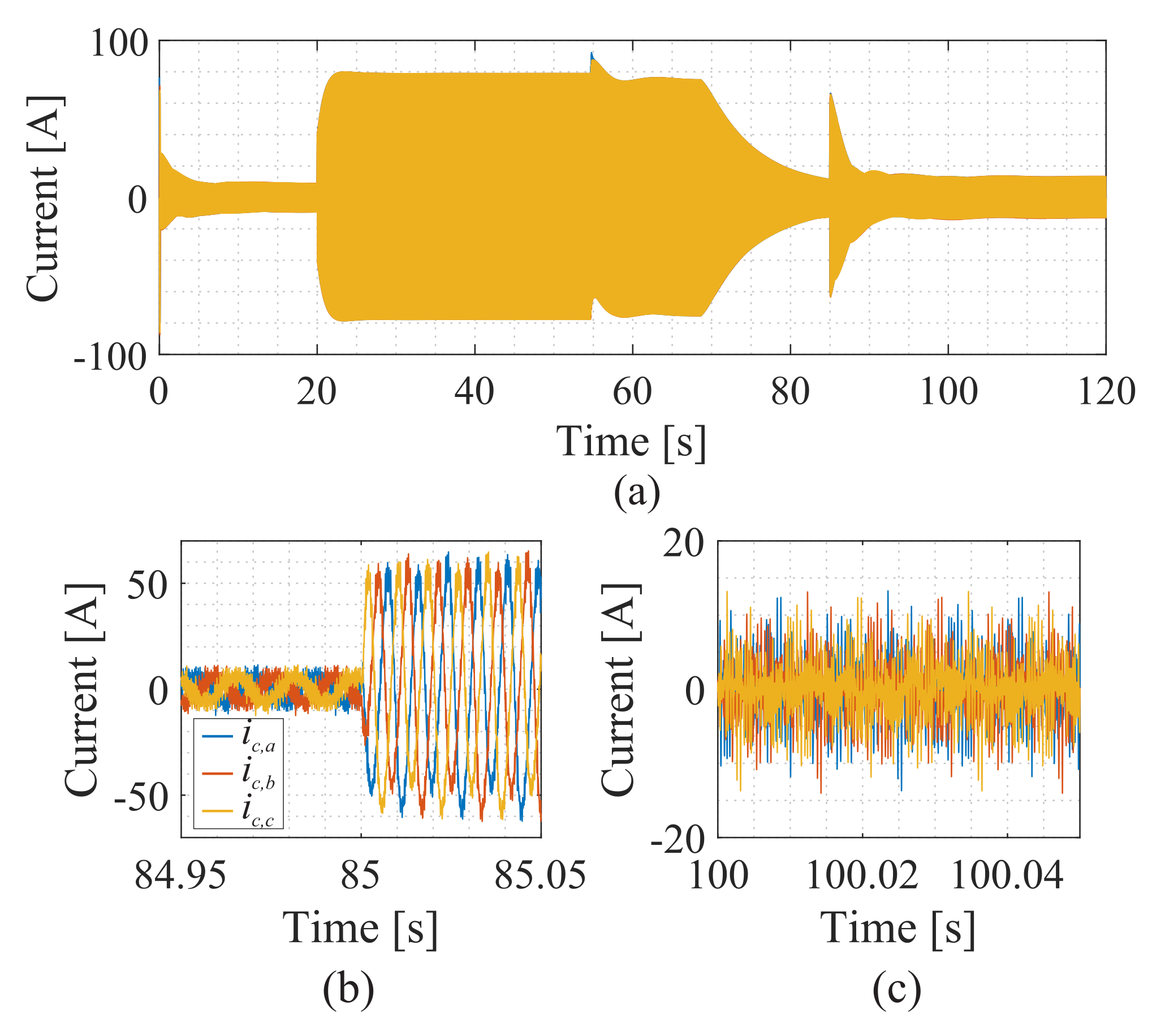
6.3. Charging Procedure-Active and Reactive Power
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Qiu, S.; Shi, B. An enhanced battery interface of MMC-based BESS. In Proceedings of the 2019 IEEE 10th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Xi’an, China, 3–6 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 434–439. [Google Scholar]
- Puranik, I.; Zhang, L.; Qin, J. Impact of low-frequency ripple on lifetime of battery in MMC-based battery storage systems. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE), Portland, OR, USA, 23–27 September 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 2748–2752. [Google Scholar]
- Ma, Y.; Lin, H.; Wang, Z.; Wang, T. Capacitor voltage balancing control of modular multilevel converters with energy storage system by using carrier phase-shifted modulation. In Proceedings of the 2017 IEEE Applied Power Electronics Conference and Exposition (APEC), Tampa, FL, USA, 26–30 March 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1821–1828. [Google Scholar]
- IEA. Total Installed Battery Storage Capacity in the Net Zero Scenario, 2015–2030; IEA: Paris, France, 2021. [Google Scholar]
- Abuagreb, M.; Allehyani, M.; Johnson, B.K. Design and test of a combined pv and battery system under multiple load and irradiation conditions. In Proceedings of the 2019 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 18–21 February 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–5. [Google Scholar]
- Pinto, J.H.D.G.; Amorim, W.C.S.; Cupertino, A.F.; Pereira, H.A.; Junior, S.I.S. Benchmarking of Single-Stage and Two-Stage Approaches for an MMC-Based BESS. Energies 2022, 15, 3598. [Google Scholar] [CrossRef]
- Xavier, L.S.; Amorim, W.; Cupertino, A.F.; Mendes, V.F.; do Boaventura, W.C.; Pereira, H.A. Power converters for battery energy storage systems connected to medium voltage systems: A comprehensive review. BMC Energy 2019, 1, 7. [Google Scholar] [CrossRef]
- Ota, J.I.Y.; Sato, T.; Akagi, H. Enhancement of performance, availability, and flexibility of a battery energy storage system based on a modular multilevel cascaded converter (MMCC-SSBC). IEEE Trans. Power Electron. 2015, 31, 2791–2799. [Google Scholar] [CrossRef]
- Zhang, L.; Gao, F.; Li, N.; Zhang, Q.; Wang, C. Interlinking modular multilevel converter of hybrid AC-DC distribution system with integrated battery energy storage. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 70–77. [Google Scholar]
- Pinto, J.H.D.G.; Amorim, W.C.S.; Cupertino, A.F.; Pereira, H.A.; Junior, S.I.S.; Teodorescu, R. Optimum Design of MMC-Based ES-STATCOM Systems: The Role of the Submodule Reference Voltage. IEEE Trans. Ind. Appl. 2020, 57, 3064–3076. [Google Scholar] [CrossRef]
- Debnath, S.; Qin, J.; Bahrani, B.; Saeedifard, M.; Barbosa, P. Operation, control, and applications of the modular multilevel converter: A review. IEEE Trans. Power Electron. 2014, 30, 37–53. [Google Scholar] [CrossRef]
- Badreldien, M.M.; Chakhchoukh, Y.; Johnson, B.K. Modeling and Control of Wind Energy Conversion System with Battery Energy Storage System. In Proceedings of the 2021 North American Power Symposium (NAPS), College Station, TX, USA, 14–16 November 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Chaudhary, S.K.; Cupertino, A.F.; Teodorescu, R.; Svensson, J.R. Benchmarking of modular multilevel converter topologies for ES-STATCOM realization. Energies 2020, 13, 3384. [Google Scholar] [CrossRef]
- Wang, G.; Konstantinou, G.; Townsend, C.D.; Pou, J.; Vazquez, S.; Demetriades, G.D.; Agelidis, V.G. A review of power electronics for grid connection of utility-scale battery energy storage systems. IEEE Trans. Sustain. Energy 2016, 7, 1778–1790. [Google Scholar] [CrossRef]
- Wersland, S.B.; Acharya, A.B.; Norum, L.E. Integrating battery into MMC submodule using passive technique. In Proceedings of the 2017 IEEE 18th Workshop on Control and Modeling for Power Electronics (COMPEL), Stanford, CA, USA, 9–12 July 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–7. [Google Scholar]
- Soong, T.; Lehn, P.W. Evaluation of emerging modular multilevel converters for BESS applications. IEEE Trans. Power Deliv. 2014, 29, 2086–2094. [Google Scholar] [CrossRef]
- Li, N.; Gao, F.; Hao, T.; Ma, Z.; Zhang, C. maharjan2009state Balancing Control Method for the MMC Battery Energy Storage System. IEEE Trans. Ind. Electron. 2018, 65, 6581–6591. [Google Scholar] [CrossRef]
- Vasiladiotis, M.; Rufer, A. Balancing control actions for cascaded H-bridge converters with integrated battery energy storage. In Proceedings of the 2013 15th European Conference on Power Electronics and Applications (EPE), Lille, France, 2–6 September 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–10. [Google Scholar]
- Cupertino, A.F.; Amorim, W.C.S.; Pereira, H.A.; Junior, S.I.S.; Chaudhary, S.K.; Teodorescu, R. High performance simulation models for ES-STATCOM based on modular multilevel converters. IEEE Trans. Energy Convers. 2020, 35, 474–483. [Google Scholar] [CrossRef]
- Vasiladiotis, M.; Rufer, A. Analysis and control of modular multilevel converters with integrated battery energy storage. IEEE Trans. Power Electron. 2014, 30, 163–175. [Google Scholar] [CrossRef]
- Bin, R.; Yonghai, X.; Qiaoqian, L. A control method for battery energy storage system based on MMC. In Proceedings of the 2015 IEEE 2nd International Future Energy Electronics Conference (IFEEC), Taipei, Taiwan, 1–4 November 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–6. [Google Scholar]
- Sharifabadi, K.; Harnefors, L.; Nee, H.; Norrga, S.; Teodorescu, R. Dynamics and Control. In Design, Control, and Application of Modular Multilevel Converters for HVDC Transmission Systems; John Wiley & Sons: Hoboken, NJ, USA, 2016; pp. 133–213. [Google Scholar]
- Millman, J. A Useful Network Theorem. Proc. IRE 1940, 28, 413–417. [Google Scholar] [CrossRef]
- Chiew, J.; Chin, C.; Toh, W.; Gao, Z.; Jia, J.; Zhang, C. A pseudo three-dimensional electrochemical-thermal model of a cylindrical LiFePO4/graphite battery. Appl. Therm. Eng. 2019, 147, 450–463. [Google Scholar] [CrossRef]
- Perez, M.A.; Ceballos, S.; Konstantinou, G.; Pou, J.; Aguilera, R.P. Modular Multilevel Converters: Recent Achievements and Challenges. IEEE Open J. Ind. Electron. Soc. 2021, 2, 224–239. [Google Scholar] [CrossRef]
- Tsolaridis, G.; Kontos, E.; Chaudhary, S.K.; Bauer, P.; Teodorescu, R. Internal balance during low-voltage-ride-through of the modular multilevel converter STATCOM. Energies 2017, 10, 935. [Google Scholar] [CrossRef]
- A123 Systems. A123 Systems Nanophosphate High Power Lithium Ion Cell ANR26650m1-b. 2012. Available online: http://www.a123systems.com/ (accessed on 25 January 2023).
- Yao, W.; Yang, Y.; Zhang, X.; Blaabjerg, F.; Loh, P.C. Design and Analysis of Robust Active Damping for LCL Filters using Digital Notch Filters. IEEE Trans. Power Electron. 2017, 32, 2360–2375. [Google Scholar] [CrossRef]
- Han, Y.; Yang, M.; Li, H.; Yang, P.; Xu, L.; Coelho, E.A.A.; Guerrero, J.M. Modeling and Stability Analysis of LCL -Type Grid-Connected Inverters: A Comprehensive Overview. IEEE Access 2019, 7, 114975–115001. [Google Scholar] [CrossRef]



































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Rated apparent power () | 10.9 MVA |
| Total energy storage () | 5.76 MWh |
| Output voltage (line to line) () | 13.8 kV |
| Grid frequency () | 60 Hz |
| Arm reactance ( ) | 0.15 pu |
| Switching frequency of the HB () | 270 Hz |
| Sampling time () | 123.45 s |
| Rated blocking voltage () | 3.3 kV |
| Reference SM voltage () | 1.8 V |
| Number of SM (N) | 90 |
| Number of series battery strings per SM () | 512 |
| Number of batteries of parallel battery strings () | 13 |
| Parameters | C-Rate | [100%] | [0%] | ||
|---|---|---|---|---|---|
| Value | 7.6 kWh | 2.5 Ah | 1 | 3.4 V | 2.5 V |
| Frequencies | Value [Hz] |
|---|---|
| 2 | |
| 0.2 | |
| 405 | |
| 37.69 | |
| 405 | |
| 37.69 | |
| 0.4 | |
| 0.04 | |
| 0.08 | |
| 0.4 | |
| 8.1 |
| Control Tuning | Parameter | Gain | Units |
|---|---|---|---|
| 5.8972 | |||
| 1396.9 | /s | ||
| 1202.7 | A | ||
| 274.80 | A/s | ||
| 1.8771 | |||
| 7.50 | /s | ||
| 27.50 | A | ||
| 0.628 | A/s | ||
| 546.70 | A | ||
| 0.0272 | V |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pinto, J.H.D.G.; Cupertino, A.F.; Pereira, H.A.; Seleme, S.I., Jr. Modeling and Control-Tuning of a Single-Stage MMC-Based BESS. Energies 2023, 16, 1502. https://doi.org/10.3390/en16031502
Pinto JHDG, Cupertino AF, Pereira HA, Seleme SI Jr. Modeling and Control-Tuning of a Single-Stage MMC-Based BESS. Energies. 2023; 16(3):1502. https://doi.org/10.3390/en16031502
Chicago/Turabian StylePinto, Jonathan H. D. G., Allan Fagner Cupertino, Heverton Augusto Pereira, and Seleme Issac Seleme, Jr. 2023. "Modeling and Control-Tuning of a Single-Stage MMC-Based BESS" Energies 16, no. 3: 1502. https://doi.org/10.3390/en16031502
APA StylePinto, J. H. D. G., Cupertino, A. F., Pereira, H. A., & Seleme, S. I., Jr. (2023). Modeling and Control-Tuning of a Single-Stage MMC-Based BESS. Energies, 16(3), 1502. https://doi.org/10.3390/en16031502